
Sum Rate Optimization of IRS-Aided Uplink Muliantenna NOMA with Practical Reflection



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- We formulate the sum rate optimization problem by incorporating the optimal receive beamforming for a given IRS phase vector in the objective function, which is characterized by the log-determinant of a matrix as in the MIMO capacity expression [7,30]. As a result, only the IRS phase vector needs to be optimized in the uplink, while the transmit beamforming and IRS phase vectors have been optimized alternately in the downlink [5];
- For a moderate-sized IRS with unit modulus reflection, we propose an extended SDR approach that converts the sum rate maximization problem into a determinant maximization (max-det) problem [33]. The max-det solution not only provides an upper bound on the optimal sum rate of the IRS-aided uplink multiantenna NOMA, but also leads to a rank-one feasible solution resulting in a near-optimal performance. This approach can also be employed to obtain an upper bound on the IRS-aided MIMO capacity under unit modulus reflection;
- For a large-sized IRS under generalized reflection, we reformulate the problem as an unconstrained nonlinear optimization problem that can be solved by using gradient-based iterative algorithms [34]. In particular, we use the more sophisticated Broyden–Fletcher–Goldfarb–Shanno (BFGS) and limited-memory BFGS (L-BFGS) algorithms [34,35], while the gradient-descent approach is used in [5]. For an efficient implementation of such iterative algorithms, we derive the gradient of the complicated objective function in a computationally efficient form under the generalized reflection;
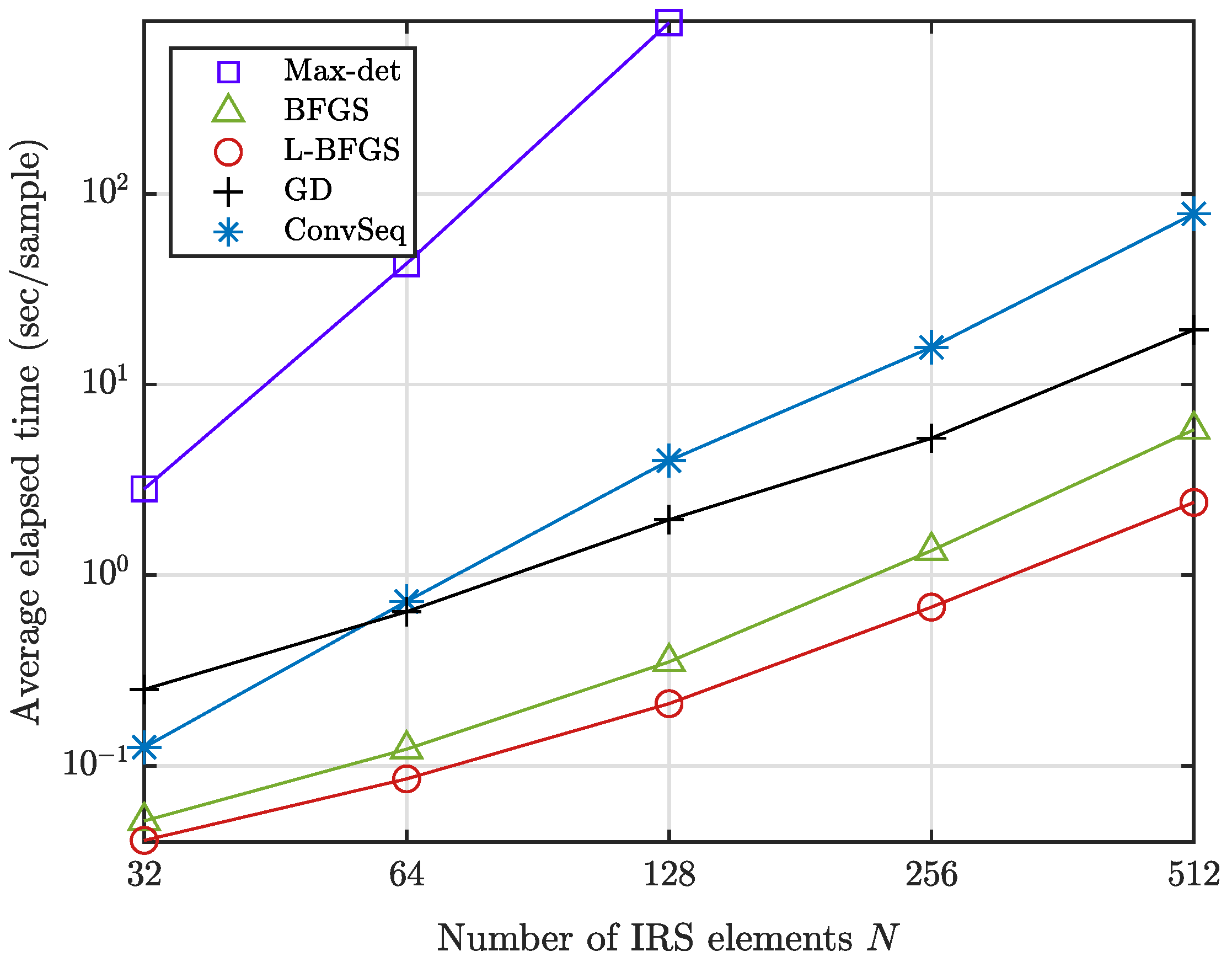
- We analyze the computational complexity of the iterative algorithms when the derived gradient is used to update the search point. The results show that the iterative algorithms reduce the complexity of the extended SDR with max-det optimization significantly. In addition, the iterative algorithms provide a performance gain over the conventional sequential optimization method [7] at a reduced computational time.
2. System Model and Problem Formulation
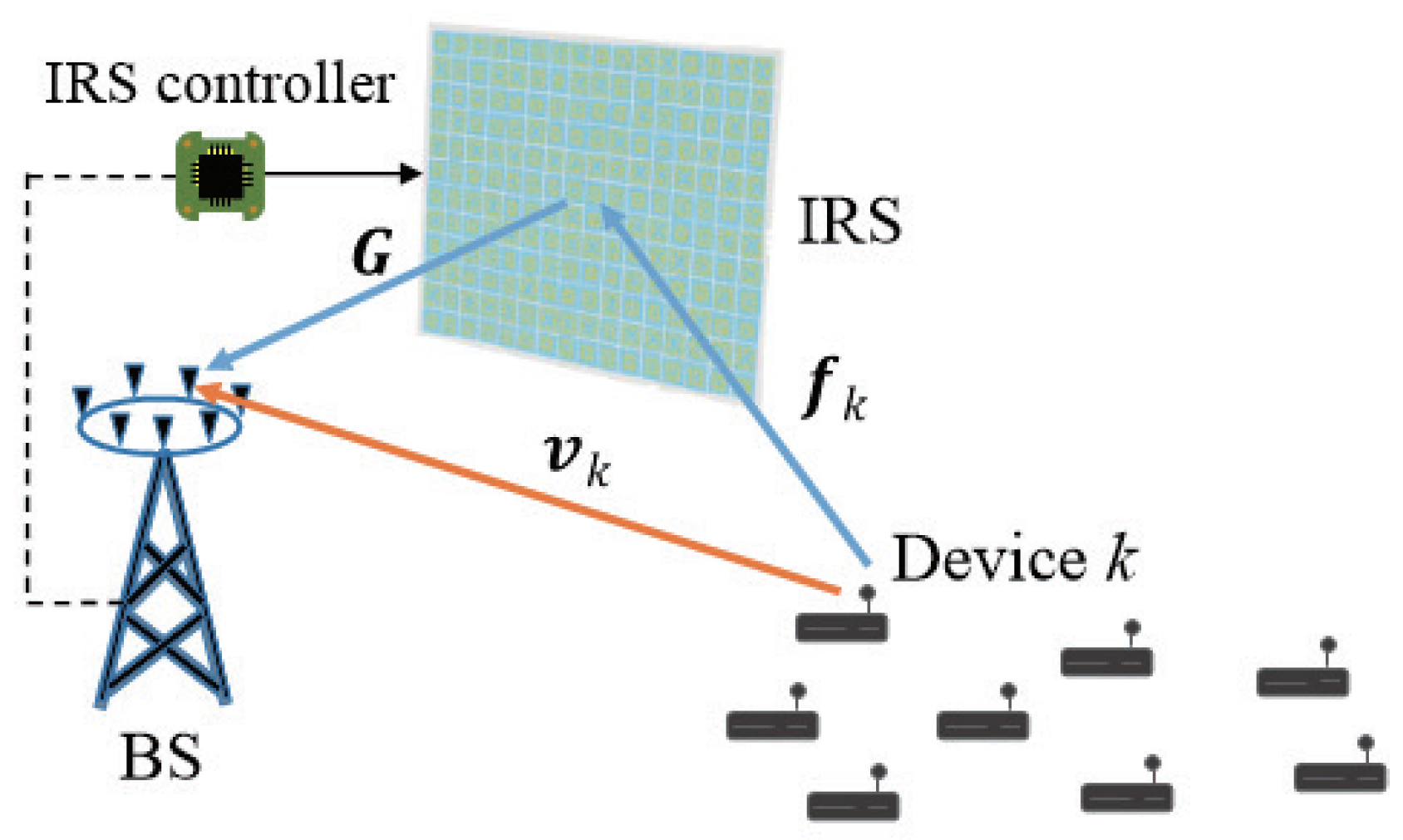
2.1. System Model
2.2. Problem Formulation
3. IRS Reflection Optimization
3.1. Determinant Maximization for a Moderate-Sized IRS
3.2. Gradient-Based Iterative Algorithms for a Large-Sized IRS
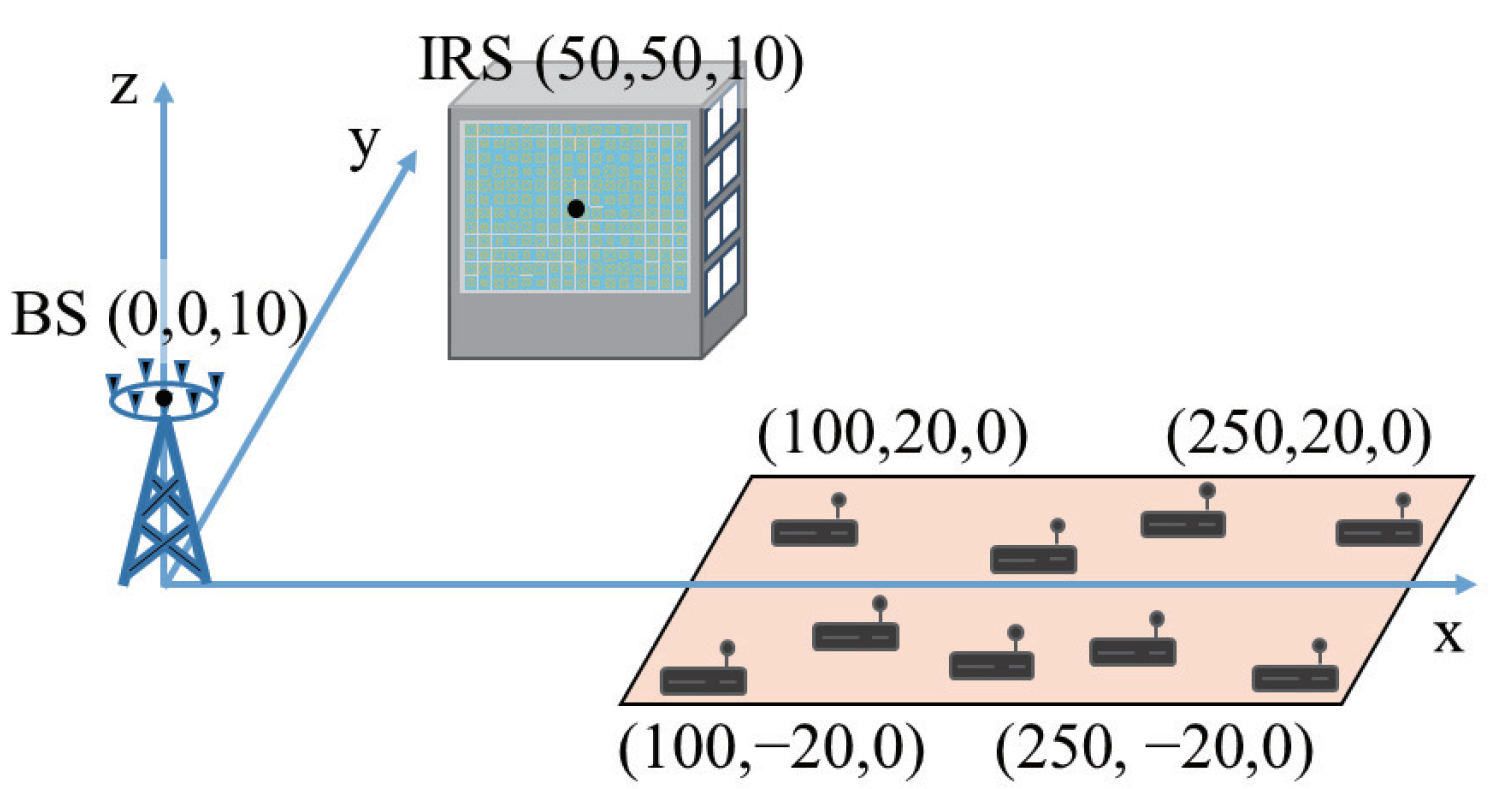
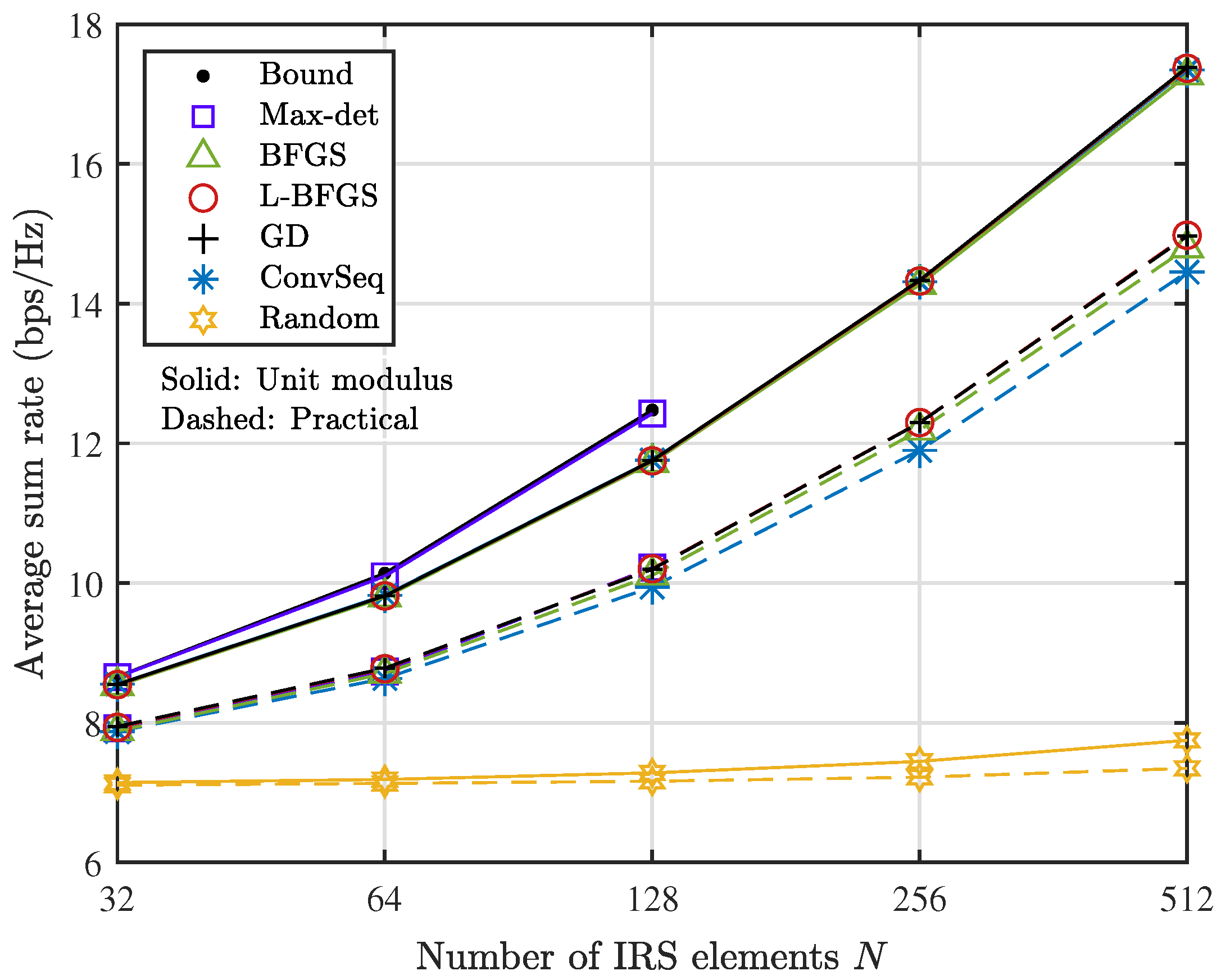
4. Simulation Results
5. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Basar, E.; Renzo, M.D.; Rosny, J.D.; Debbah, M.; Alouini, M.; Zhang, R. Wireless communications through reconfigurable intelligent surfaces. IEEE Access 2019, 7, 116753–116773. [Google Scholar] [CrossRef]
- Saad, W.; Bennis, M.; Chen, M. A vision of 6G wireless systems: Applications, trends, technologies, and open research problems. IEEE Netw. 2020, 34, 134–142. [Google Scholar] [CrossRef]
- Huang, C.; Hu, S.; Alexandropoulos, G.C.; Zappone, A.; Yuen, C.; Zhang, R.; Di Renzo, M.; Debbah, M. Holographic MIMO surfaces for 6G wireless networks: Opportunities, challenges, and trends. IEEE Wirel. Commun. 2020, 27, 118–125. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, R. Intelligent reflecting surface enhanced wireless network via joint active and passive beamforming. IEEE Trans. Wirel. Commun. 2019, 18, 5394–5409. [Google Scholar] [CrossRef]
- Guo, H.; Liang, Y.C.; Chen, J.; Larsson, E.G. Weighted sum-rate maximization for reconfigurable intelligent surface aided wireless networks. IEEE Trans. Wirel. Commun. 2020, 19, 3064–3076. [Google Scholar] [CrossRef]
- Xiao, H.; Dong, L.; Wang, W. Intelligent reflecting surface-assisted secure multi-input single-output cognitive radio transmission. Sensors 2020, 20, 3480. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, R. Capacity characterization for intelligent reflecting surface aided MIMO communication. IEEE J. Selct. Areas Commun. 2020, 38, 1823–1838. [Google Scholar] [CrossRef]
- Nadeem, Q.; Kammoun, A.; Chaaban, A.; Debbah, M.; Alouini, M. Asymptotic max-min SINR analysis of reconfigurable intelligent surface assisted MISO systems. IEEE Trans. Wirel. Commun. 2020, 19, 7748–7764. [Google Scholar] [CrossRef]
- Souto, V.D.P.; Souza, R.D.; Uchôa-Filho, B.F.; Li, Y. Intelligent reflecting surfaces beamforming optimization with statistical channel knowledge. Sensors 2022, 22, 2390. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, S.; Zheng, B.; You, C.; Zhang, R. Intelligent reflecting surface aided wireless communication: A tutorial. IEEE Trans. Commun. 2021, 69, 3313–3351. [Google Scholar] [CrossRef]
- Liu, Y.; Qin, Z.; Elkashlan, M.; Ding, Z.; Nallanathan, A.; Hanzo, L. Nonorthogonal multiple access for 5G and beyond. Proc. IEEE 2017, 105, 2347–2381. [Google Scholar] [CrossRef]
- Choi, J. NOMA-Based random access With multichannel ALOHA. IEEE J. Select. Areas Commun. 2017, 35, 2736–2743. [Google Scholar] [CrossRef]
- Rim, M.; Kang, C.G. Uplink non-orthogonal multiple access with channel estimation errors for internet of things applications. Sensors 2019, 19, 912. [Google Scholar] [CrossRef] [PubMed]
- Lee, C.; Kim, Y.H. Receive BF and resource allocation for wireless powered non-orthogonal multiple access. IEEE Trans. Veh. Technol. 2020, 64, 4563–4568. [Google Scholar] [CrossRef]
- Wei, Z.; Yang, L.; Ng, D.W.K.; Yuan, J.; Hanzo, L. On the performance gain of NOMA over OMA in uplink communication systems. IEEE Trans. Commun. 2020, 68, 536–568. [Google Scholar] [CrossRef]
- Maraqa, O.; Rajasekaran, A.S.; Al-Ahmadi, S.; Yanikomeroglu, H.; Sait, S.M. A survey of rate-optimal power domain NOMA with enabling technologies of future wireless networks. IEEE Commun. Surv. Tutor. 2020, 22, 2192–2235. [Google Scholar] [CrossRef]
- Ding, Z.; Poor, H.V. A simple design of IRS-NOMA transmission. IEEE Commun. Lett. 2020, 24, 1119–1123. [Google Scholar] [CrossRef]
- Zheng, B.; Wu, Q.; Zhang, R. Intelligent reflecting surface-assisted multiple access with user pairing: NOMA or OMA? IEEE Commun. Lett. 2020, 24, 753–757. [Google Scholar] [CrossRef]
- Mu, X.; Liu, Y.; Guo, L.; Lin, J.; Al-Dhahir, N. Capacity and optimal resource allocation for IRS-assisted multi-user communication systems. IEEE Trans. Commun. 2021, 69, 3771–3786. [Google Scholar] [CrossRef]
- Mu, X.; Liu, Y.; Guo, L.; Lin, J.; Al-Dhahir, N. Exploiting intelligent reflecting surfaces in NOMA networks: Joint beamforming optimization. IEEE Trans. Wirel. Commun. 2020, 19, 6884–6898. [Google Scholar] [CrossRef]
- Fang, F.; Xu, Y.; Pham, Q.V.; Ding, Z. Energy-efficient design of IRS-NOMA networks. IEEE Trans. Veh. Technol. 2020, 69, 14088–14092. [Google Scholar] [CrossRef]
- Zhu, J.; Huang, Y.; Wang, J.; Navaie, K.; Ding, Z. Power efficient IRS-assisted NOMA. IEEE Trans. Commun. 2021, 69, 900–913. [Google Scholar] [CrossRef]
- Xie, X.; Fang, F.; Ding, Z. Joint optimization of beamforming, phase-shifting and power allocation in a multi-cluster IRS-NOMA network. IEEE Trans. Veh. Technol. 2021, 70, 7705–7717. [Google Scholar] [CrossRef]
- Yang, G.; Xu, X.; Liang, Y.; Renzo, M. Reconfigurable intelligent surface-assisted non-orthogonal multiple access. IEEE Trans. Wirel. Commun. 2021, 20, 3137–3151. [Google Scholar] [CrossRef]
- Cheng, Y.; Li, K.; Liu, Y.; Teh, K.; Karagiannidis, G. Non-orthogonal multiple access (NOMA) with multiple intelligent reflecting surfaces. IEEE Trans. Wirel. Commun. 2021, 20, 7184–7195. [Google Scholar] [CrossRef]
- Tahir, B.; Schwarz, S.; Rupp, M. Analysis of uplink IRS-assisted NOMA under Nakagami-m fading via moments matching. IEEE Wirel. Commun. Lett. 2021, 10, 624–628. [Google Scholar] [CrossRef]
- Zeng, M.; Li, X.; Li, G.; Hao, W.; Dobre, O.A. Sum rate maximization for IRS-assisted uplink NOMA. IEEE Commun. Lett. 2021, 25, 234–238. [Google Scholar] [CrossRef]
- Song, D.; Shin, W.; Lee, J. A maximum throughput design for wireless powered communication networks with IRS-NOMA. IEEE Wirel. Commun. Lett. 2021, 10, 849–853. [Google Scholar] [CrossRef]
- Wu, Q.; Zhou, X.; Schober, R. IRS-assisted wireless powered NOMA: Do we really need different phase shifts in DL and UL? IEEE Wirel. Commun. Lett. 2021, 10, 1493–1497. [Google Scholar] [CrossRef]
- Lyu, B.; Ramezani, P.; Hoang, D.T.; Jamalipou, A. IRS-Assisted downlink and uplink NOMA in wireless powered communication networks. IEEE Trans. Veh. Technol. 2022, 71, 1083–1088. [Google Scholar] [CrossRef]
- Luo, Z.; Ma, W.; So, A.M.; Ye, Y.; Zhang, S. Semidefinite relaxation of quadratic optimization problems. IEEE Sig. Process. Mag. 2010, 27, 20–34. [Google Scholar] [CrossRef]
- Abeywickrama, S.; Zhang, R.; Wu, Q.; Yuen, C. Intelligent reflecting surface: Practical phase shift model and beamforming optimization. IEEE Trans. Commun. 2020, 68, 5849–5863. [Google Scholar] [CrossRef]
- Vandenberghe, L.; Boyd, S.; Wu, P. Determinant maximization with linear matrix inequality constraints. SIAM J. Matrix Anal. Appl. 1998, 19, 499–533. [Google Scholar] [CrossRef]
- Kochenderfer, M.J.; Wheeler, T.A. Algorithms for Optimization; The MIT Press: Cambridge, MA, USA, 2018. [Google Scholar]
- Liu, D.C.; Nocedal, J. On the limited memory BFGS method for large scale optimization. Math. Program. 1989, 45, 503–528. [Google Scholar] [CrossRef]
- Tse, D.; Viswanath, P. Fundamentals of Wireless Communication; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, J.; Cantos, L.; Choi, J.; Kim, Y.H. Sum Rate Optimization of IRS-Aided Uplink Muliantenna NOMA with Practical Reflection. Sensors 2022, 22, 4449. https://doi.org/10.3390/s22124449
Choi J, Cantos L, Choi J, Kim YH. Sum Rate Optimization of IRS-Aided Uplink Muliantenna NOMA with Practical Reflection. Sensors. 2022; 22(12):4449. https://doi.org/10.3390/s22124449
Chicago/Turabian StyleChoi, Jihyun, Luiggi Cantos, Jinho Choi, and Yun Hee Kim. 2022. "Sum Rate Optimization of IRS-Aided Uplink Muliantenna NOMA with Practical Reflection" Sensors 22, no. 12: 4449. https://doi.org/10.3390/s22124449
APA StyleChoi, J., Cantos, L., Choi, J., & Kim, Y. H. (2022). Sum Rate Optimization of IRS-Aided Uplink Muliantenna NOMA with Practical Reflection. Sensors, 22(12), 4449. https://doi.org/10.3390/s22124449