
Deep Learning-Based Device-Free Localization Scheme for Simultaneous Estimation of Indoor Location and Posture Using FMCW Radars


Abstract
:1. Introduction
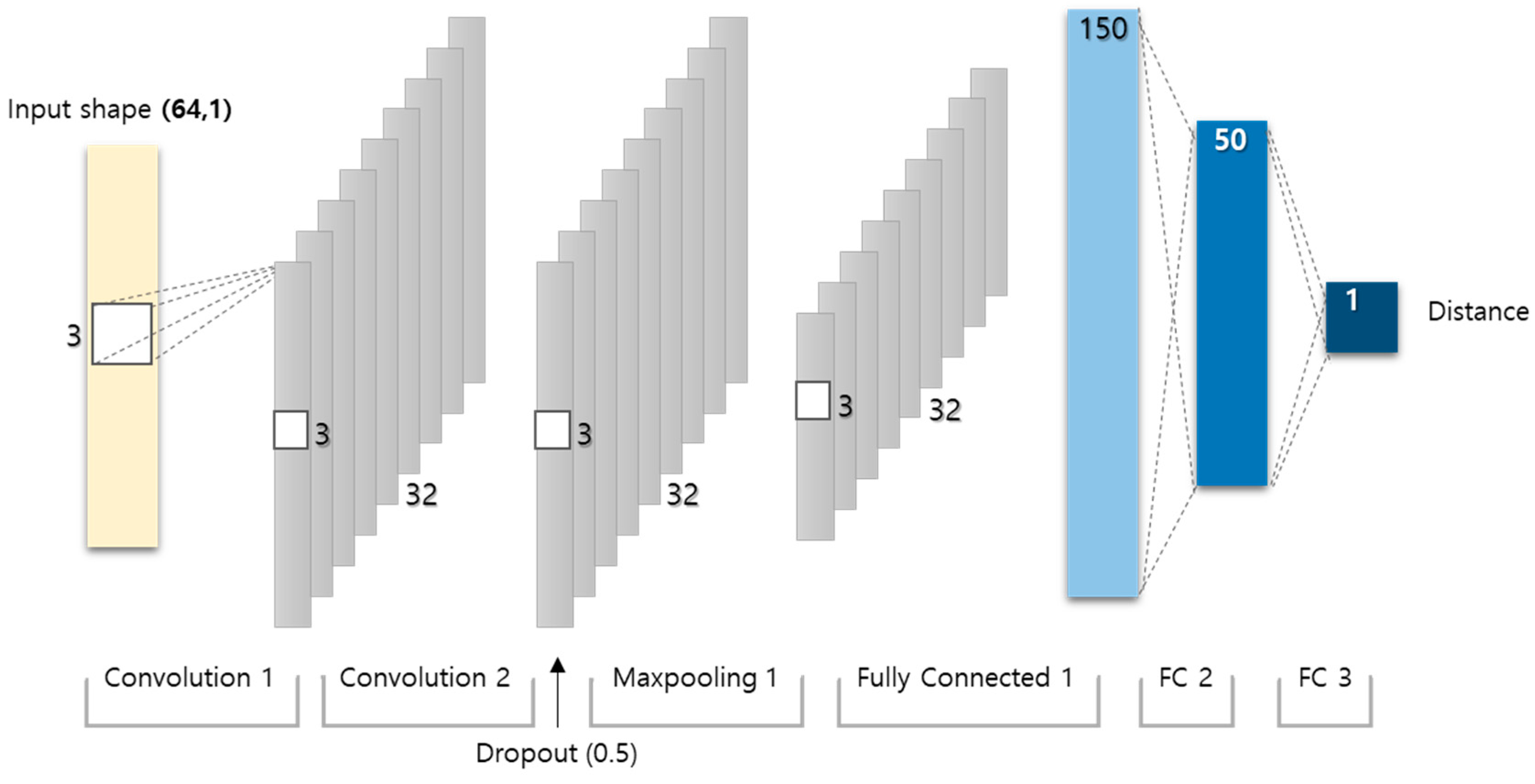
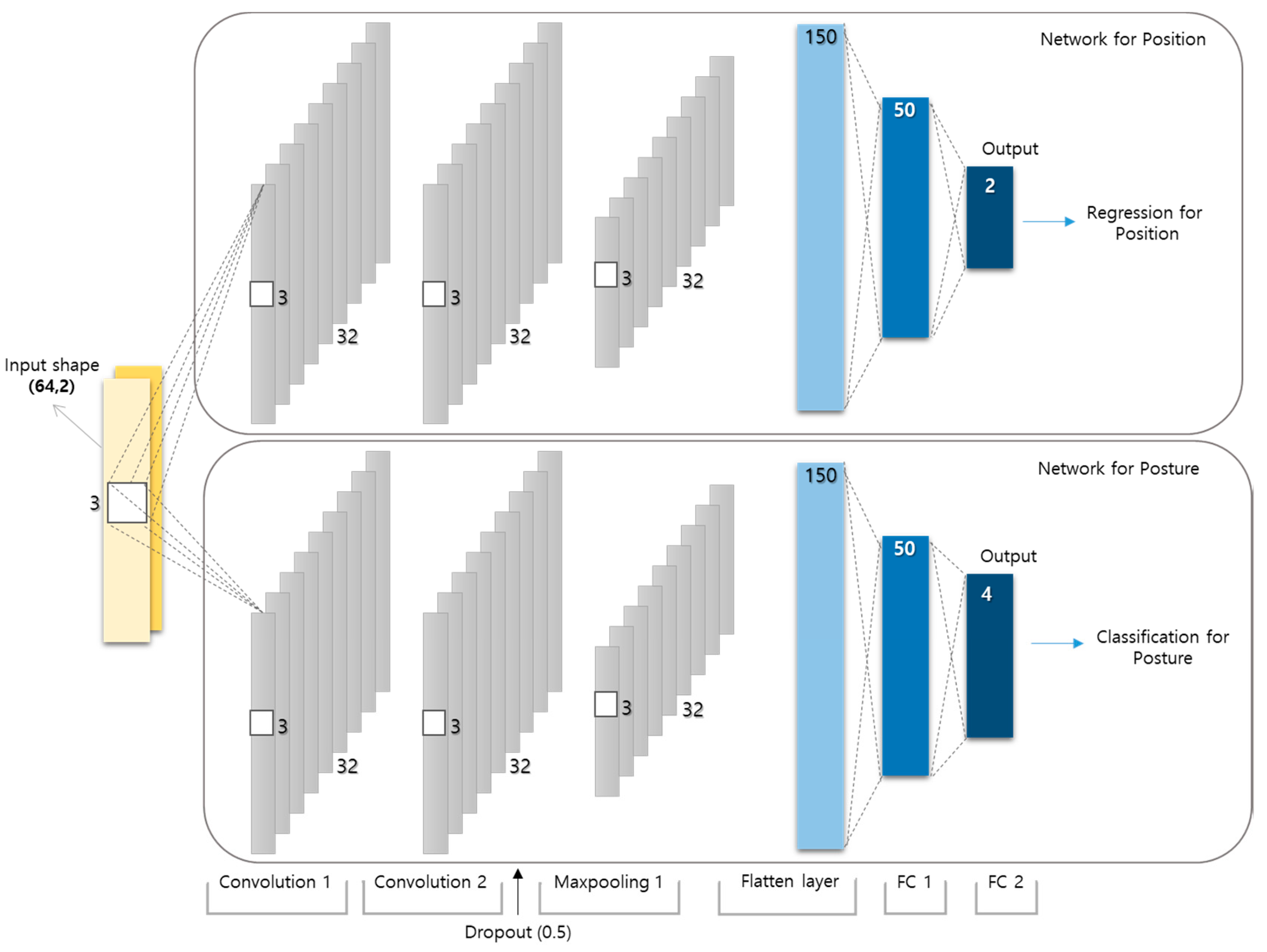
- A DL-based scheme is proposed for simultaneous estimation of the indoor location and posture of a device-free target using 24-GHz FMCW radars. Unlike most existing studies that focused on the 2D localization of the target, we propose a simultaneous indoor location and posture estimation scheme based on the DL technique. A parallel convolutional neural network (CNN) structure with a regression model for localization and a classification model for posture estimation are included in the proposed scheme.
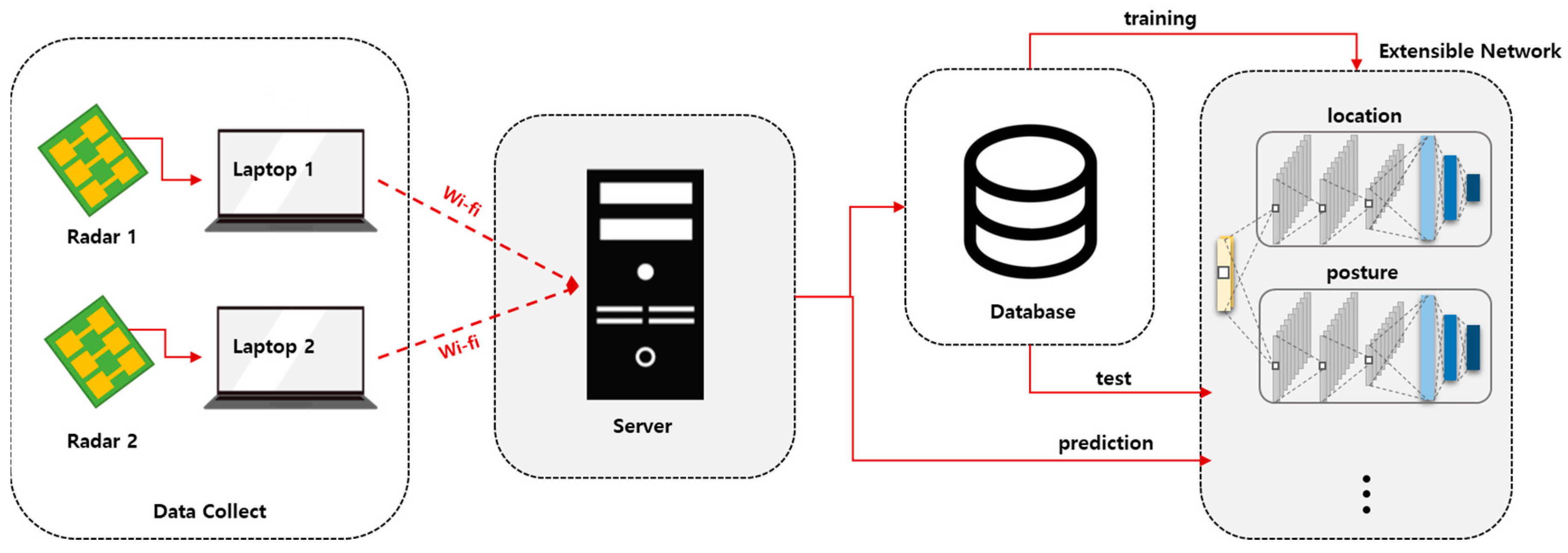
- The developed simultaneous location and posture estimation system comprises two FMCW radars and a server to experimentally evaluate the performance of the proposed scheme. The developed system collects the time-series radar data at each location, and the collected data are divided into training and testing datasets to evaluate the proposed DL model.
- The performance of the proposed scheme is compared with that of conventional schemes under identical experimental conditions. Particularly, the performance of posture estimation is analyzed using the proposed scheme and conventional CSP and correlation schemes in terms of both false-positive (FP) and false-negative (FN) errors to ensure an unbiased comparison.
2. Related Works
3. System Description
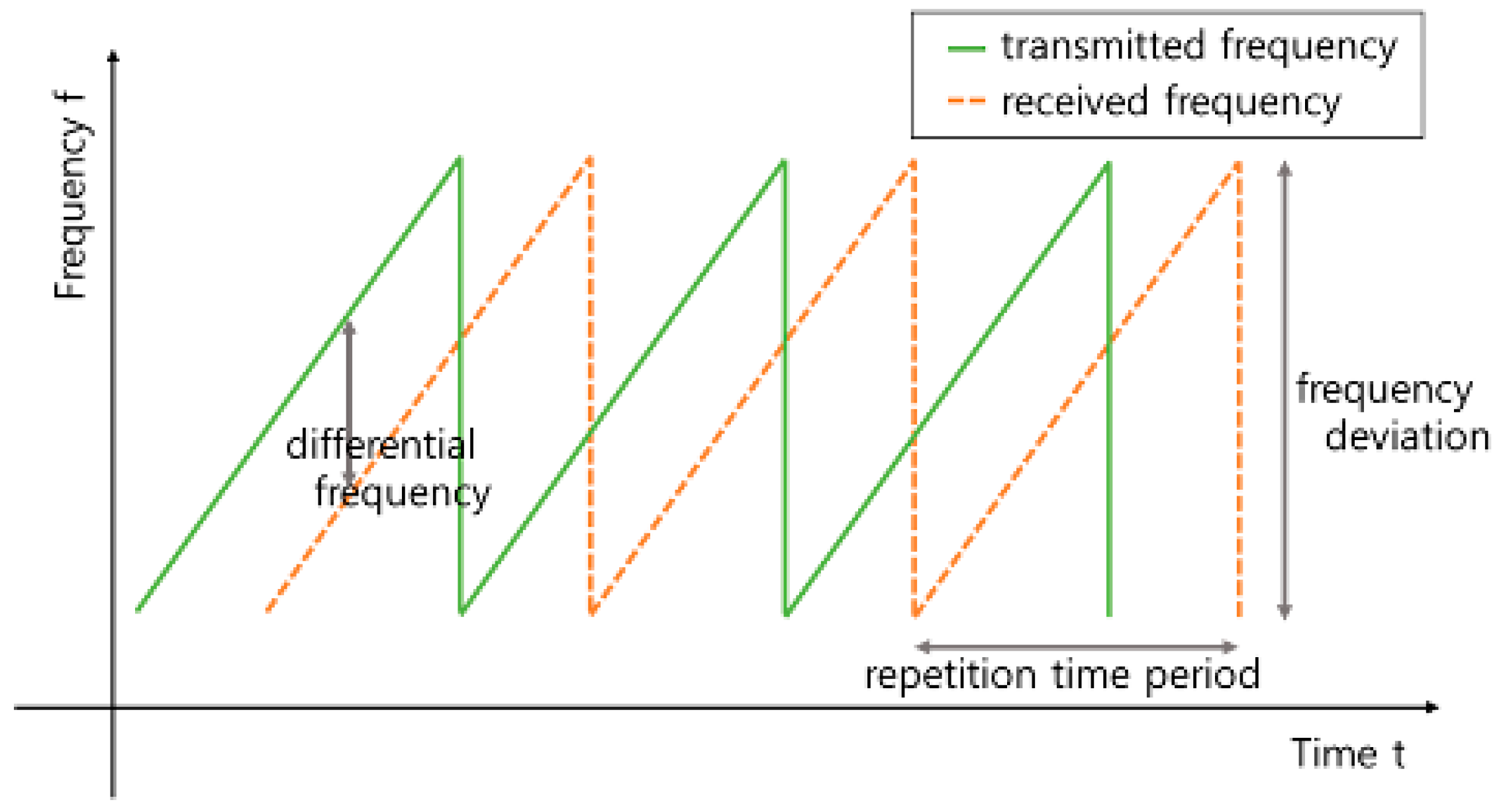
3.1. FMCW Radar Principle
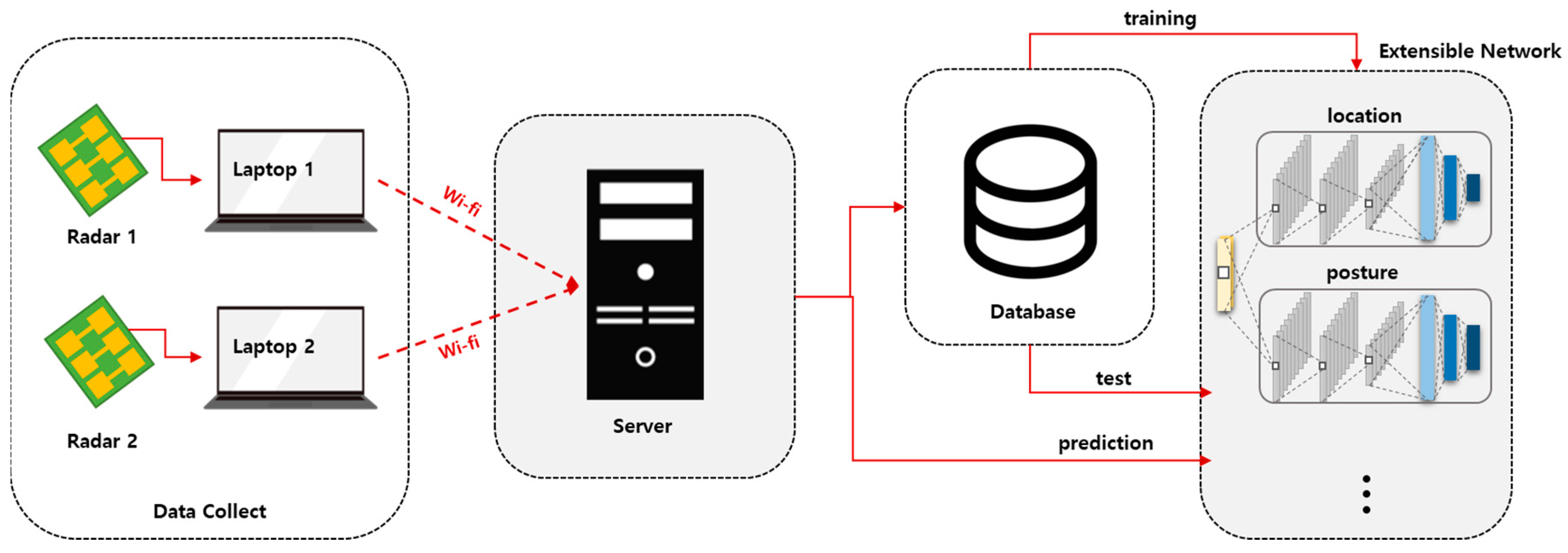
3.2. System Overview
3.3. Conventional Scheme
4. Proposed Scheme
5. Performance Evaluation
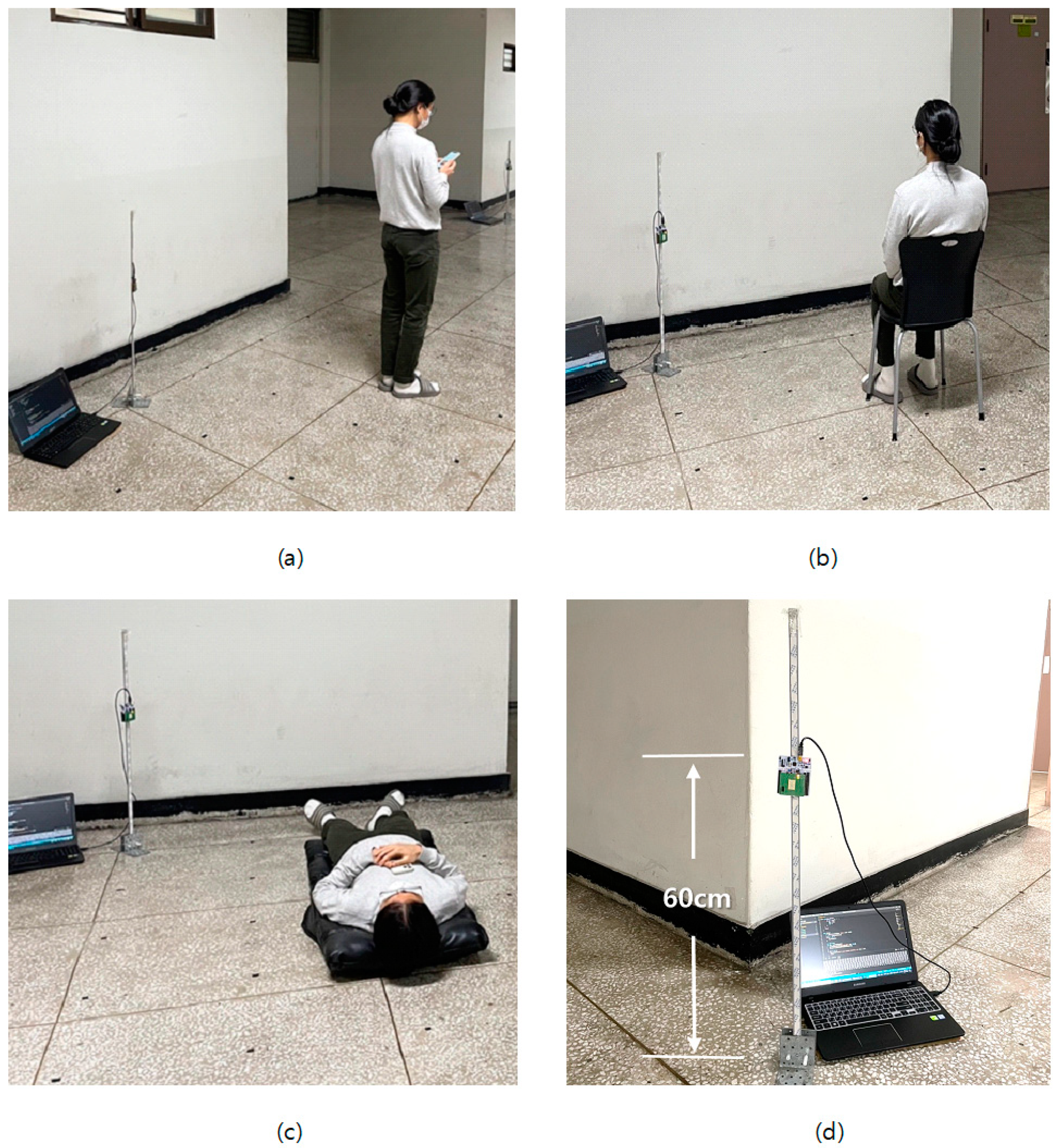
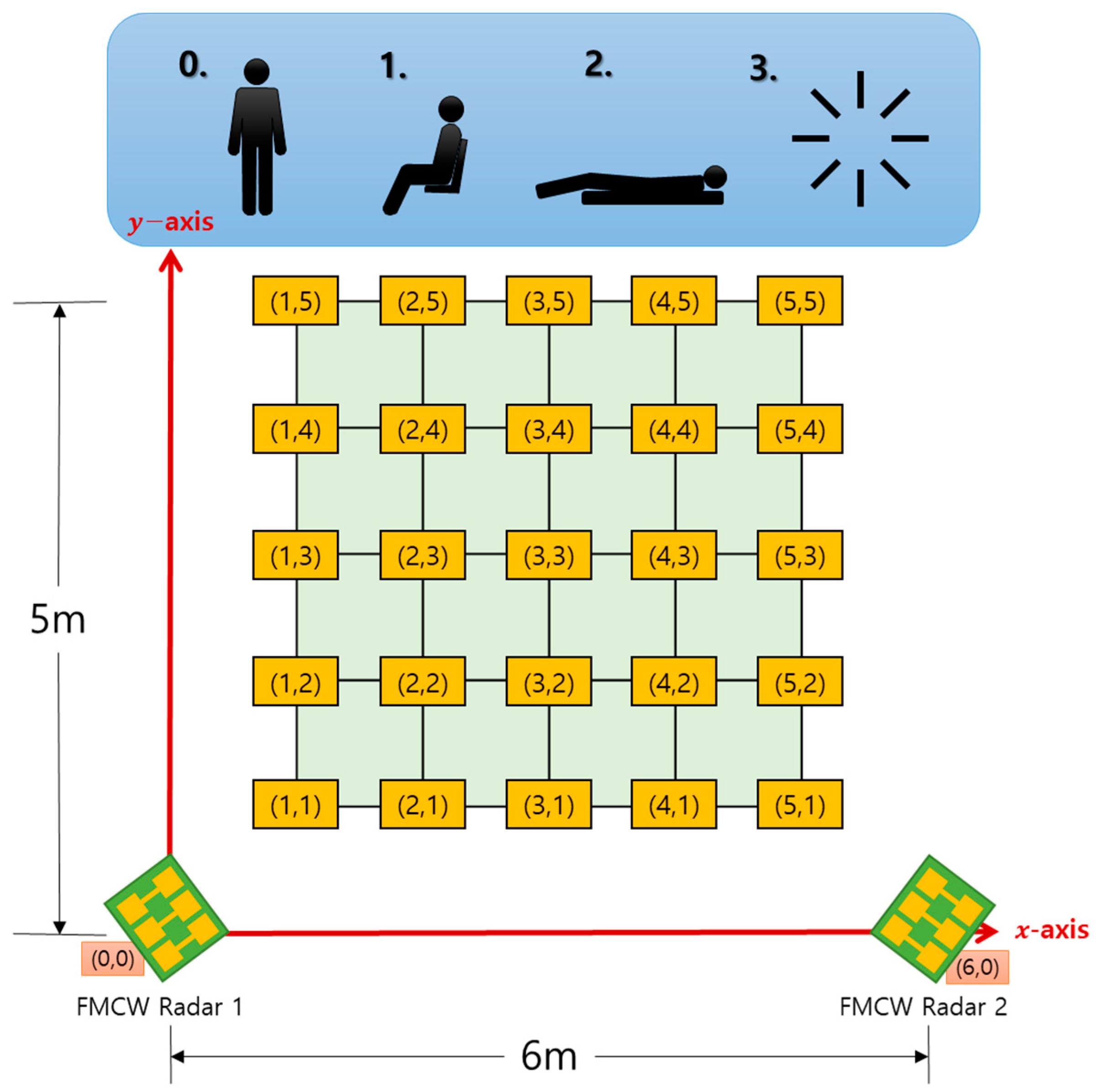
5.1. Experimental Environments
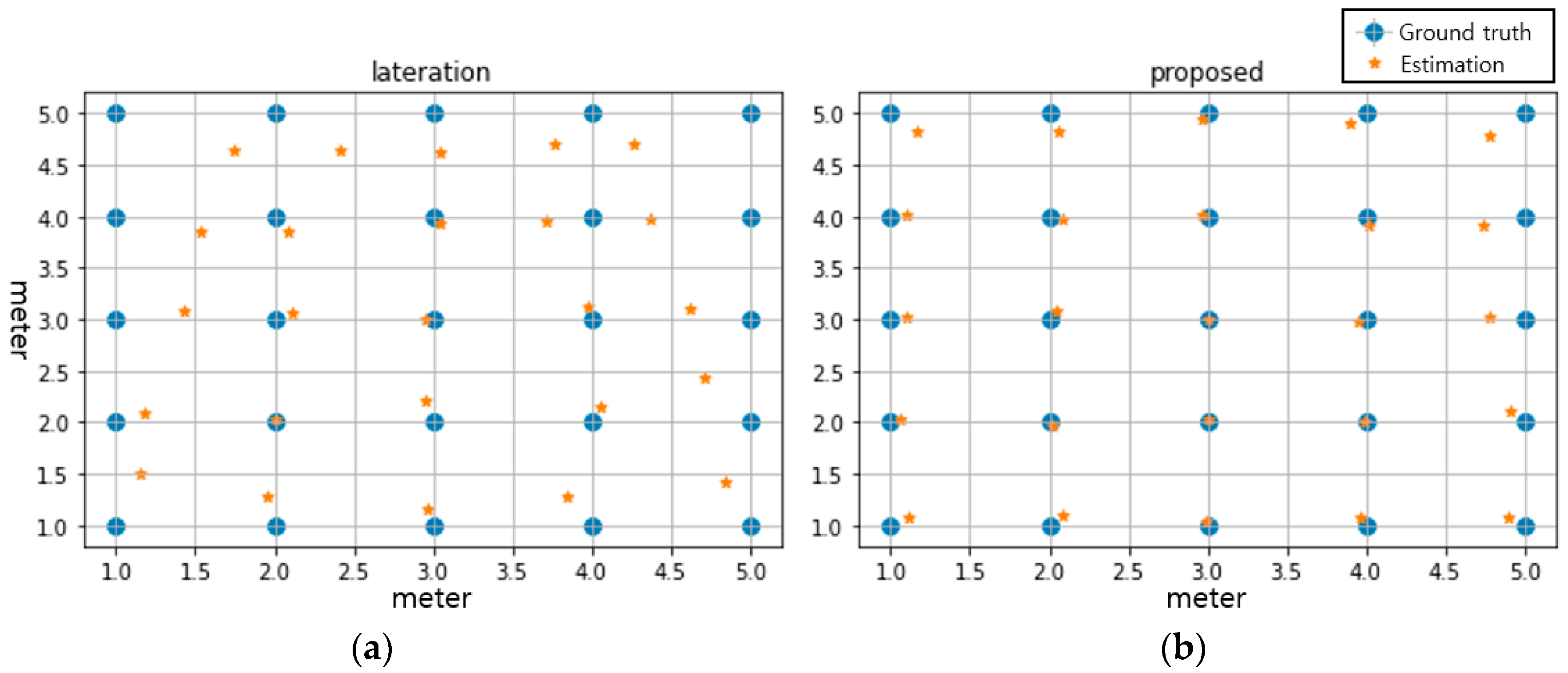
5.2. Experimental Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cardillo, E.; Li, C.; Caddemi, A. Embedded heating, ventilation, and air conditioning control systems: From traditional technologies towards radar advanced sensing. Rev. Sci. Instrum. 2021, 92, 061501. [Google Scholar] [CrossRef] [PubMed]
- Deak, G.; Curran, K.; Condell, J. A survey of active and passive indoor localisation systems. Comput. Commun. 2012, 35, 1939–1954. [Google Scholar] [CrossRef]
- Jan, S.S.; Yeh, S.J.; Liu, Y.W. Received signal strength database interpolation by Kriging for a Wi-Fi indoor positioning system. Sensors 2015, 15, 21377–21393. [Google Scholar] [CrossRef] [PubMed]
- Seco, F.; Jiménez, A.R. Smartphone-based cooperative indoor localization with RFID technology. Sensors 2018, 18, 266. [Google Scholar] [CrossRef] [PubMed]
- Wang, B.; Zhou, S.; Liu, W.; Mo, Y. Indoor localization based on curve fitting and location search using received signal strength. IEEE Trans. Ind. Electron. 2015, 62, 572–582. [Google Scholar] [CrossRef]
- Hu, W.; Tan, T.; Wang, L.; Maybank, S. A Survey on visual surveillance of object motion and behaviours. IEEE Trans. Syst. Man Cybern. Part C 2004, 34, 334–352. [Google Scholar] [CrossRef]
- Hampapur, A.; Brown, L.; Connell, J.; Ekin, A.; Haas, N.; Lu, M.; Merkl, H.; Pankanti, S. Smart video surveillance: Exploring the concept of multiscale spatiotemporal tracking. IEEE Signal Process. Mag. 2005, 22, 38–51. [Google Scholar] [CrossRef]
- Guo, Y.; Huang, K.; Jiang, N.; Guo, X.; Li, Y.; Wang, G. An exponential-Rayleigh model for RSS-based device-free localization and tracking. IEEE Trans. Mob. Comput. 2015, 14, 484–494. [Google Scholar] [CrossRef]
- Yang, S.; Guo, Y.; Li, N.; Lu, A. PGMP: A device-free moving object counting and localization approach in the varying environment. IEEE Wirel. Commun. Lett. 2020, 9, 1287–1290. [Google Scholar] [CrossRef]
- Yang, S.; Sun, C.; Kim, Y. A new rigid body localization scheme exploiting participatory search algorithm. J. Electr. Eng. Technol. 2020, 15, 2777–2784. [Google Scholar] [CrossRef]
- Talampas, M.C.R.; Low, K.S. An enhanced geometric filter algorithm with channel diversity for device-free localization. IEEE Trans. Instrum. Meas. 2016, 65, 378–387. [Google Scholar] [CrossRef]
- Wang, J.; Gao, Q.; Cheng, P.; Yu, Y.; Xin, K.; Wang, H. Lightweight robust device-free localization in wireless networks. IEEE Trans. Ind. Electron. 2014, 61, 5681–5689. [Google Scholar] [CrossRef]
- Sun, C.; Zhou, B.; Yang, S.; Kim, Y. Geometric midpoint algorithm for device-free localization in low-density wireless sensor networks. Electronics 2021, 10, 2924. [Google Scholar] [CrossRef]
- Karpathy, A.; Toderici, G.; Shetty, S.; Leung, T.; Sukthankar, R.; Fei-Fei, L. Large-scale video classification with convolutional neural networks. In Proceedings of the IEEE Conference on Computer Vision And Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 1725–1732. [Google Scholar]
- Li, S.Z.; Yu, B.; Wu, W.; Su, S.Z.; Ji, R.R. Feature learning based on SAE–PCA network for human gesture recognition in RGBD images. Neurocomputing 2015, 151, 565–573. [Google Scholar] [CrossRef]
- Fioranelli, F.; Ritchie, M.; Griffiths, H. Classification of unarmed/armed personnel using the NetRAD multistatic radar for micro-Doppler and singular value decomposition features. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1933–1937. [Google Scholar] [CrossRef]
- Al-Qudsi, B.; El-Shennawy, M.; Joram, N.; Ellinger, F. A coverage efficient FMCW positioning system. In Proceedings of the International Conference on Localization and GNSS (ICL-GNSS), Barcelona, Spain, 28–30 June 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Park, K.; Lee, J.; Kim, Y. Deep learning-based indoor two-dimensional localization scheme using a frequency-modulated continuous wave radar. Electronics 2021, 10, 2166. [Google Scholar] [CrossRef]
- Kimoto, R.; Ishida, S.; Yamamoto, T.; Tagashira, S.; Fukuda, A. MuCHLoc: Indoor ZigBee localization system utilizing inter-channel characteristics. Sensors 2019, 19, 1645. [Google Scholar] [CrossRef]
- Tao, Y.; Wu, L.; Sidén, J.; Wang, G. Monte Carlo-based indoor RFID positioning with dual-antenna joint rectification. Electronics 2021, 10, 1548. [Google Scholar] [CrossRef]
- Kim, B.S.; Jin, Y.; Lee, J.; Kim, S. FMCW Radar Estimation Algorithm with High Resolution and Low Complexity Based on Reduced Search Area. Sensors 2022, 22, 1202. [Google Scholar] [CrossRef]
- Yang, S.; Sun, C.; Kim, Y. Indoor 3D localization scheme based on BLE signal fingerprinting and 1D convolutional neural network. Electronics 2021, 10, 1758. [Google Scholar] [CrossRef]
- Jeon, H.; Jo, U.; Jo, M.; Kim, N.; Kim, Y. An adaptive AP selection scheme based on RSS for enhancing positioning accuracy. Wirel. Pers. Commun. 2013, 69, 1535–1550. [Google Scholar] [CrossRef]
- Jain, V.K.; Tapaswi, S.; Shukla, A. Location estimation based on semi-supervised locally linear embedding (SSLLE) approach for indoor wireless networks. Wirel. Pers. Commun. 2012, 67, 879–893. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Grosse-Wentrup, M.; Buss, M. Multiclass Common Spatial Patterns and Information Theoretic Feature Extraction. IEEE Trans. Biomed. Eng. 2008, 55, 1991–2000. [Google Scholar] [CrossRef] [PubMed]
- Kim, Y.; Ling, H. Human Activity Classification Based on Micro-Doppler Signatures Using a Support Vector Machine. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1328–1337. [Google Scholar] [CrossRef]
- Niu, Z.; Zhou, M.; Wang, L.; Gao, X.; Hua, G. Ordinal Regression with Multiple Output CNN for Age Estimation. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 4920–4928. [Google Scholar] [CrossRef]
- Park, K.E.; Lee, J.P.; Kim, Y. Deep learning-based indoor distance estimation scheme using FMCW radar. Information 2021, 12, 80. [Google Scholar] [CrossRef]
- Muñoz-Ferreras, J.M.; Peng, Z.; Gómez-García, R.; Li, C. Review on advanced short-range multimode continuous-wave radar architectures for healthcare applications. IEEE J. Electromagn. RF Microw. Med. Biol. 2017, 1, 14–25. [Google Scholar] [CrossRef]
- Yan, H.; Zhang, Y.; Wang, Y.; Xu, K. WiAct: A passive WiFi-based human activity recognition system. IEEE Sens. J. 2020, 1, 296–305. [Google Scholar] [CrossRef]
- Tariq, O.B.; Lazarescu, M.T.; Lavagno, L. Neural networks for indoor human activity reconstructions. IEEE Sens. J. 2020, 20, 13571–13584. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, K.; Ni, L.M. Wifall: Device-free fall detection by wireless networks. IEEE Trans. Mob. Comput. 2016, 16, 581–594. [Google Scholar] [CrossRef]
- Bhattacharya, A.; Vaughan, R. Deep learning radar design for breathing and fall detection. IEEE Sens. J. 2020, 20, 5072–5085. [Google Scholar] [CrossRef]
- Sun, Y.; Xiong, H.; Tan, D.K.P.; Han, T.X.; Du, R.; Yang, X.; Ye, T.T. Moving target localization and activity/gesture recognition for indoor radio frequency sensing applications. IEEE Sens. J. 2021, 21, 24318–24326. [Google Scholar] [CrossRef]
- Aggarwal, J.; Cai, Q. Human motion analysis: A review. Comput. Vis. Image Understand. 1999, 73, 428–440. [Google Scholar] [CrossRef]
- Khan, A.; Ali Shah, J.; Kadir, K.; Albattah, W.; Khan, F. Crowd monitoring and localization using deep convolutional neural network: A review. Appl. Sci. 2020, 10, 4781. [Google Scholar] [CrossRef]
- del Blanco, C.R.; Carballeira, P.; Jaureguizar, F.; García, N. Robust people indoor localization with omnidirectional cameras using a grid of spatial-aware classifiers. Signal Process. Image Commun. 2021, 93, 116135. [Google Scholar] [CrossRef]
- Wilson, J.; Patwari, N. A fade level skew-Laplace signal strength model for device-free localization with wireless networks. IEEE Trans. Mobile Comput. 2012, 11, 947–958. [Google Scholar] [CrossRef]
- Talampas, M.C.R.; Low, K.S. A geometric filter algorithm for robust device-free localization in wireless networks. IEEE Trans. Ind. Inf. 2016, 12, 1670–1678. [Google Scholar] [CrossRef]
- Ninnemann, J.; Schwarzbach, P.; Jung, A.; Michler, O. Device-free passive localization based on narrowband channel impulse responses. In Proceedings of the 21st International Radar Symposium (IRS), Warsaw, Poland, 5–8 October 2020; pp. 88–93. [Google Scholar]
- Han, J.H. Study on 24 GHz Short Range Radar System Using Delayed FMCW Signal; Kwangwoon University: Seoul, Korea, 2014. [Google Scholar]
- Kim, N.; Yu, M.; Lee, S. A method for improving range estimation accuracy in narrowband indoor FMCW radar range sensors. In Proceedings of the Annual Conference of IEIE, Jeju, Korea, 25–27 January 2019; pp. 26–28. [Google Scholar]
- Vaishnav, P.; Santra, A. Continuous human activity classification with unscented Kalman filter tracking using fmcw radar. IEEE Sens. Lett. 2020, 4, 1–4. [Google Scholar] [CrossRef]
- Abdu, F.J.; Zhang, Y.; Deng, Z. Activity Classification Based on Feature Fusion of FMCW Radar Human Motion Micro-Doppler Signatures. IEEE Sens. J. 2022, 22, 8648–8662. [Google Scholar] [CrossRef]
- Cardillo, E.; Li, C.; Caddemi, A. Radar-Based Monitoring of the Worker Activities by Exploiting Range-Doppler and Micro-Doppler Signatures. In Proceedings of the 2021 IEEE International Workshop on Metrology for Industry 4.0 & IoT (MetroInd4. 0 & IoT), Rome, Italy, 7–9 June 2021. [Google Scholar] [CrossRef]
- Zhu, J.P.; Chen, H.Q.; Ye, W.B. Classification of human activities based on radar signals using 1D-CNN and LSTM. In Proceedings of the 2020 IEEE International Symposium on Circuits and Systems (ISCAS), Seville, Spain, 12–14 October 2020. [Google Scholar] [CrossRef]
- Gu, F.; Chung, M.H.; Chignell, M.; Valaee, S.; Zhou, B.; Liu, X. A survey on deep learning for human activity recognition. ACM Comput. Surv. 2022, 54, 1–34. [Google Scholar] [CrossRef]
- Rizk, H.; Torki, M.; Youssef, M. CellinDeep: Robust and accurate cellular-based indoor localization via deep learning. IEEE Sens. J. 2018, 19, 2305–2312. [Google Scholar] [CrossRef]
- Zhou, C.; Liu, J.; Sheng, M.; Zheng, Y.; Li, J. Exploiting fingerprint correlation for fingerprint-based indoor localization: A deep learning based approach. IEEE Trans. Veh. Technol. 2021, 70, 5762–5774. [Google Scholar] [CrossRef]
- Zhang, R.; Jing, X.; Wu, S.; Jiang, C.; Mu, J.; Yu, F.R. Device-free wireless sensing for human detection: The deep learning perspective. IEEE Internet Things J. 2021, 8, 2517–2539. [Google Scholar] [CrossRef]
- Bai, Z.; Zhang, X.L. Speaker recognition based on deep learning: An overview. Neural Netw. 2021, 140, 65–99. [Google Scholar] [CrossRef]
- Yin, Y.; Song, C.; Li, M.; Niu, Q. A CSI-based indoor fingerprinting localization with model integration approach. Sensors 2019, 19, 2998. [Google Scholar] [CrossRef] [PubMed]
- Song, J.; Patel, M.; Ghaffari, M. Fusing Convolutional Neural Network and Geometric Constraint for Image-based Indoor Localization. IEEE Robot. Autom. Lett. 2022, 7, 1674–1681. [Google Scholar] [CrossRef]
- Purohit, J.; Wang, X.; Mao, S.; Sun, X.; Yang, C. Fingerprinting-based indoor and outdoor localization with LoRa and deep learning. In Proceedings of the GLOBECOM 2020—2020 IEEE Global Communications Conference, Taipei, Taiwan, 7–11 December 2020. [Google Scholar] [CrossRef]
- Zhang, Y.; Qu, C.; Wang, Y. An indoor positioning method based on CSI by using features optimization mechanism with LSTM. IEEE Sens. J. 2020, 20, 4868–4878. [Google Scholar] [CrossRef]
- Kim, Y.; Moon, T. Human detection and activity classification based on micro-Doppler signatures using deep convolutional neural networks. IEEE Geosci. Remote Sens. Lett. 2016, 13, 8–12. [Google Scholar] [CrossRef]
- Lotte, F.; Bougrain, L.; Cichocki, A.; Clerc, M.; Congedo, M.; Rakotomamonjy, A.; Yger, F. A review of classification algorithms for EEG-based brain–computer interfaces: A 10 year update. J. Neural Eng. 2018, 15, 031005. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Types | Values |
|---|---|
| Learning rate | 0.0001 |
| Training epoch | 1000 |
| Batch size | 50 |
| Optimizer | Adam |
| Loss function | MSE for localization Cross-entropy for posture estimation |
| Schemes | Standing | Sitting | Lying | Average |
|---|---|---|---|---|
| Conventional | 0.65 m | 0.62 m | 0.68 m | 0.65 m |
| Proposed | 0.22 m | 0.24 m | 0.23 m | 0.23 m |
| Schemes | Standing | Sitting | Lying | Absence | Average | ||
|---|---|---|---|---|---|---|---|
| Conventional | Correlation | FN | 48.3% | 62.5% | 55.3% | 66.4% | 54.8% |
| FP | 55.8% | 56.4% | 83.0% | 11.0% | |||
| CSP | FN | 30.1% | 54.2% | 55.6% | 38.6% | 42.0% | |
| FP | 53.0% | 40.3% | 55.6% | 12.0% | |||
| SVM | FN | 2.1% | 4.1% | 18.1% | 30.5% | 10.0% | |
| FP | 8.0% | 19.2% | 3.1% | 0% | |||
| Proposed | FN | 1.3% | 1.7% | 3.5% | 0.2% | 1.7% | |
| FP | 1.6% | 3.3% | 1.1% | 0.7% | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.; Park, K.; Kim, Y. Deep Learning-Based Device-Free Localization Scheme for Simultaneous Estimation of Indoor Location and Posture Using FMCW Radars. Sensors 2022, 22, 4447. https://doi.org/10.3390/s22124447
Lee J, Park K, Kim Y. Deep Learning-Based Device-Free Localization Scheme for Simultaneous Estimation of Indoor Location and Posture Using FMCW Radars. Sensors. 2022; 22(12):4447. https://doi.org/10.3390/s22124447
Chicago/Turabian StyleLee, Jeongpyo, Kyungeun Park, and Youngok Kim. 2022. "Deep Learning-Based Device-Free Localization Scheme for Simultaneous Estimation of Indoor Location and Posture Using FMCW Radars" Sensors 22, no. 12: 4447. https://doi.org/10.3390/s22124447
APA StyleLee, J., Park, K., & Kim, Y. (2022). Deep Learning-Based Device-Free Localization Scheme for Simultaneous Estimation of Indoor Location and Posture Using FMCW Radars. Sensors, 22(12), 4447. https://doi.org/10.3390/s22124447