
Polymer Optical Fiber Plantar Pressure Sensors: Design and Validation



Abstract
:1. Introduction
2. Materials and Methods
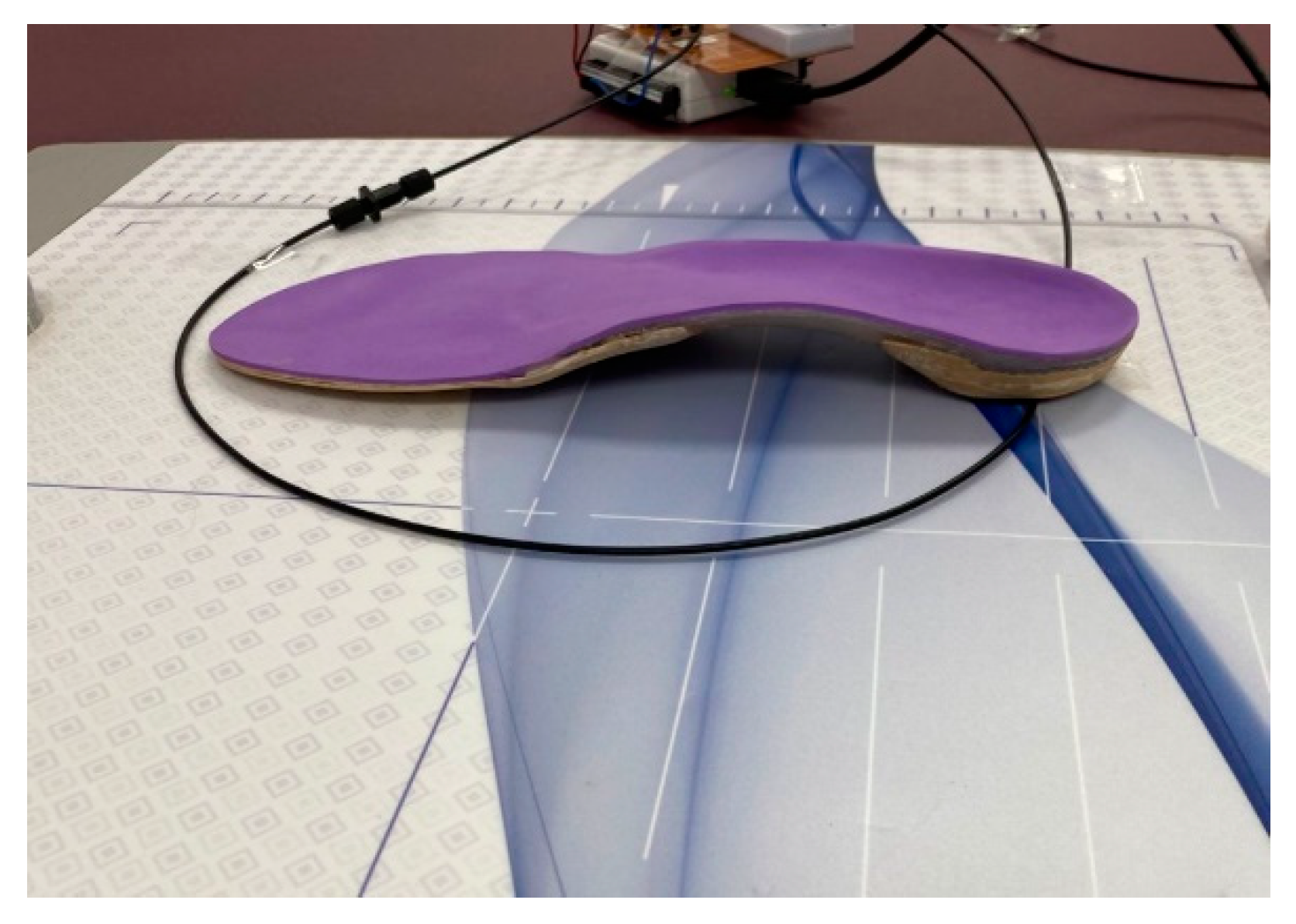
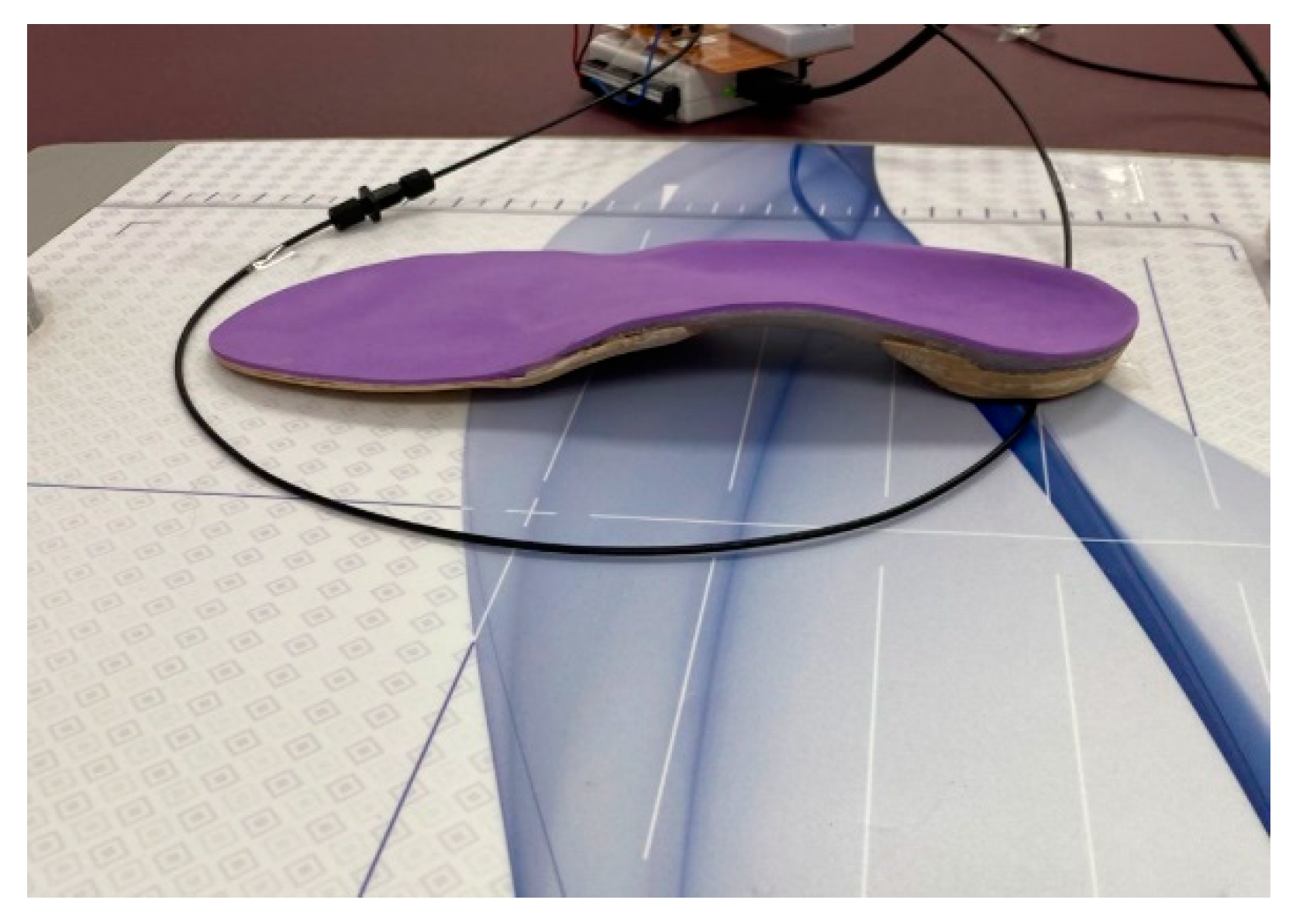
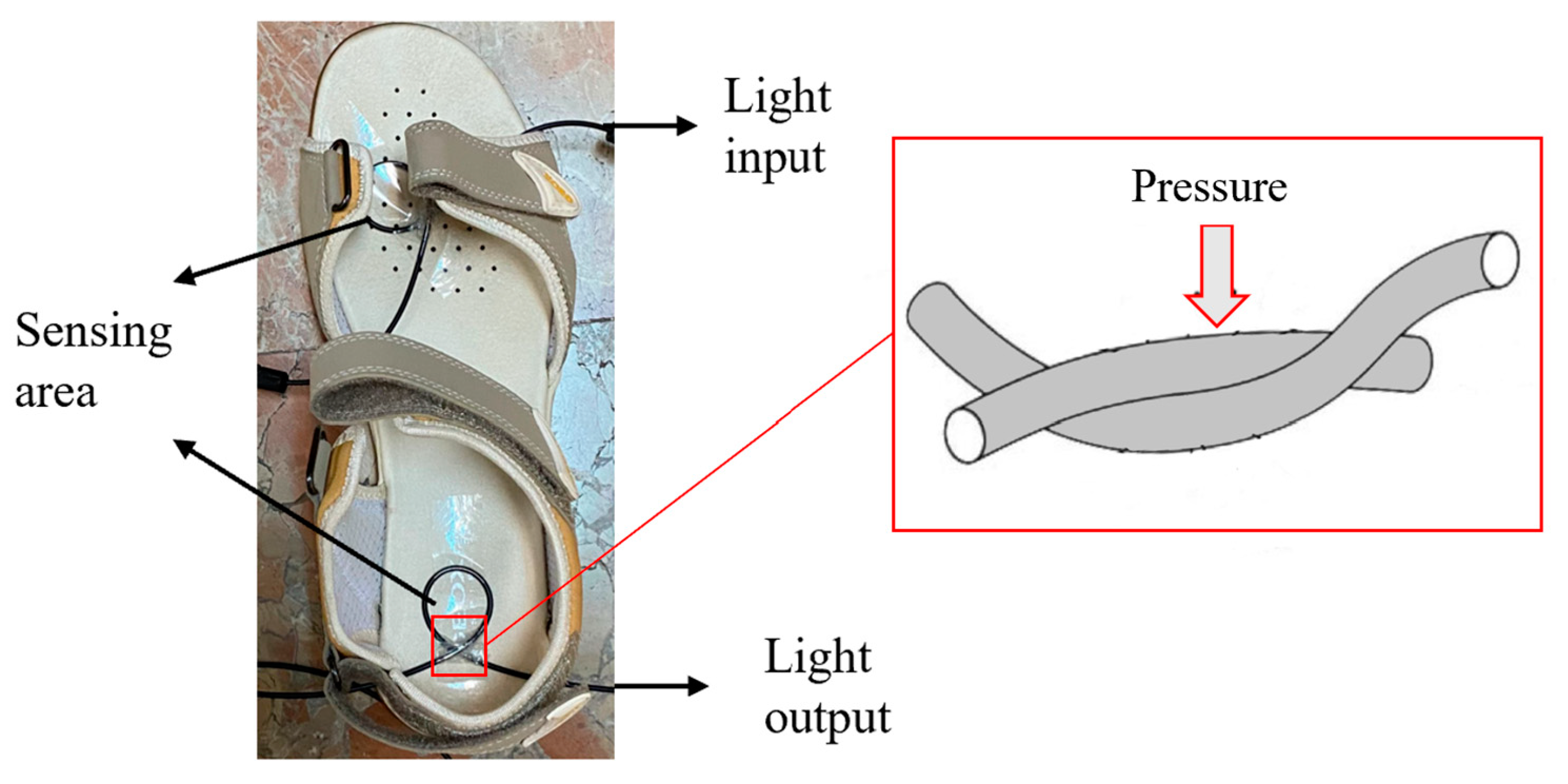
2.1. Sensing Element and Insoles
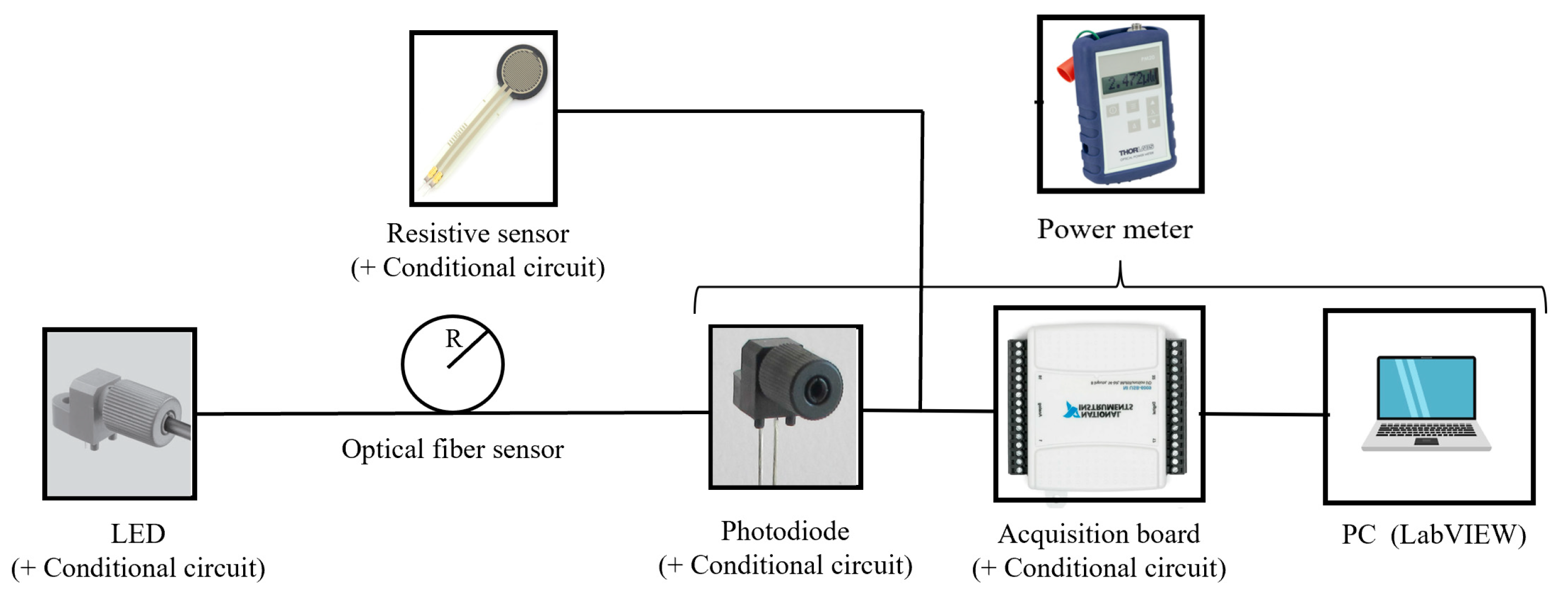
2.2. Sensing System and Experimental Procedures
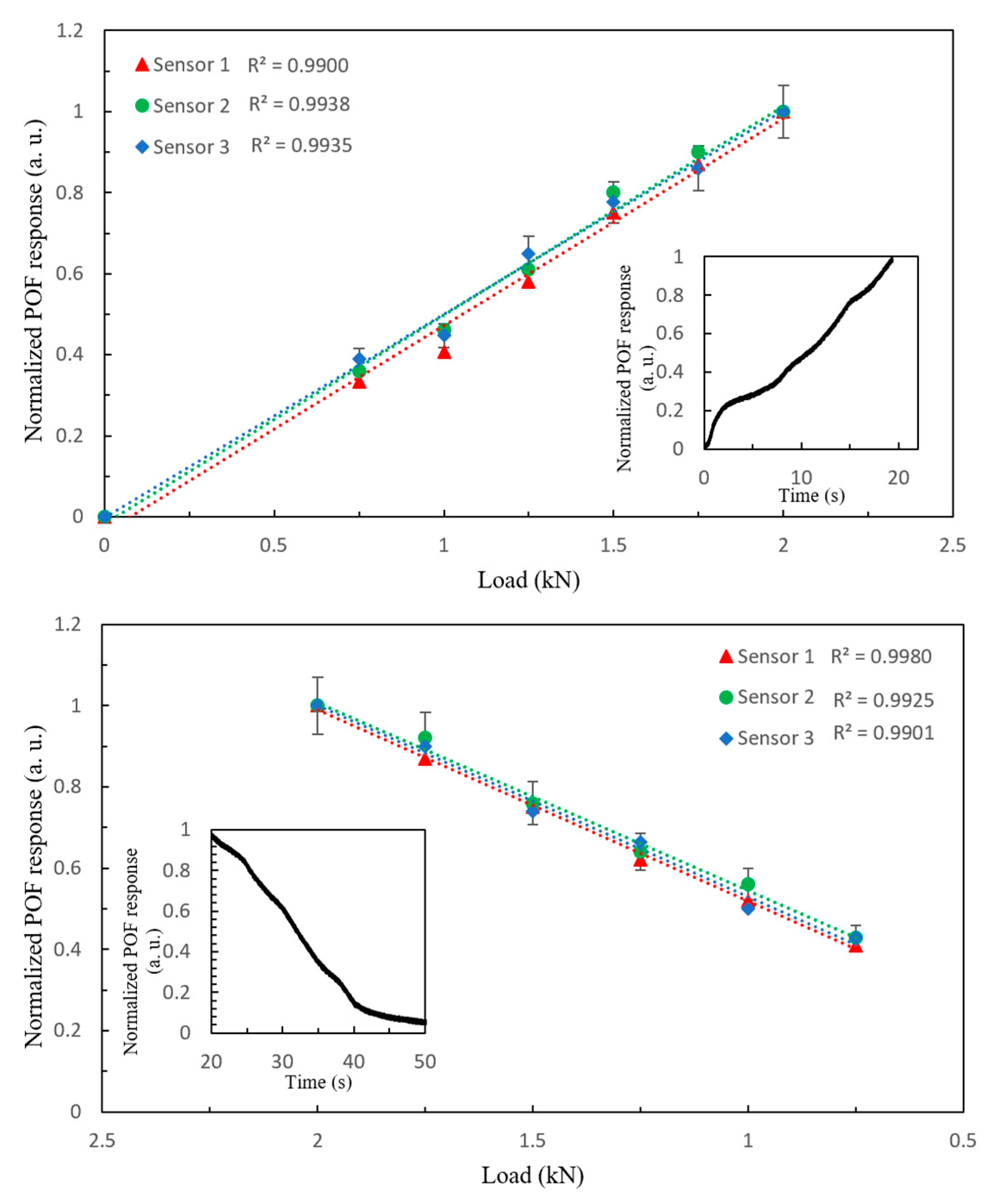
- Load ramp from 0 to 2 kN, and from 2 to 0 kN with a step of 100 N (both loading and unloading).
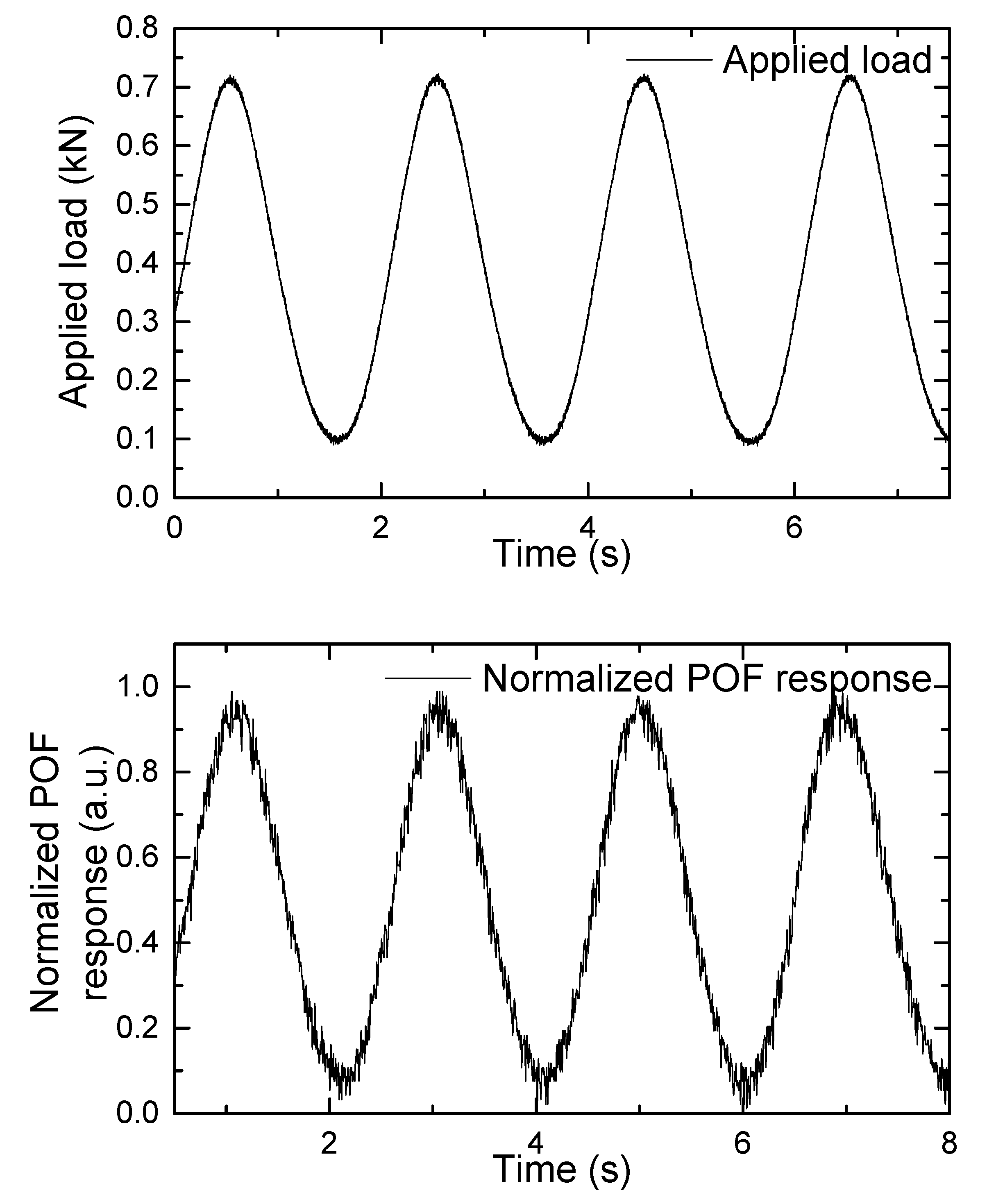
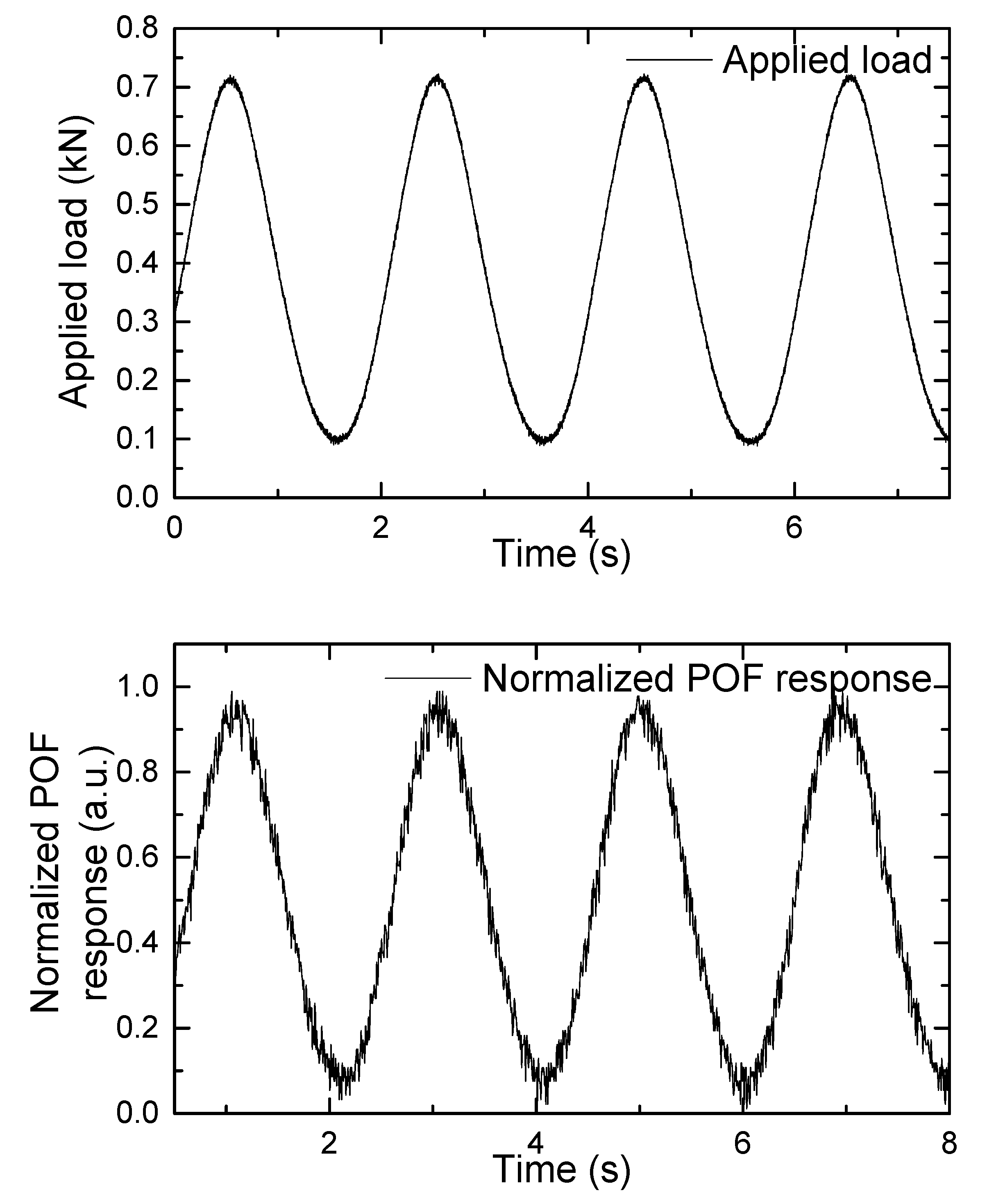
- Sinusoidal load with an amplitude of 0.3 kN and a frequency of 0.5 Hz to simulate walking.
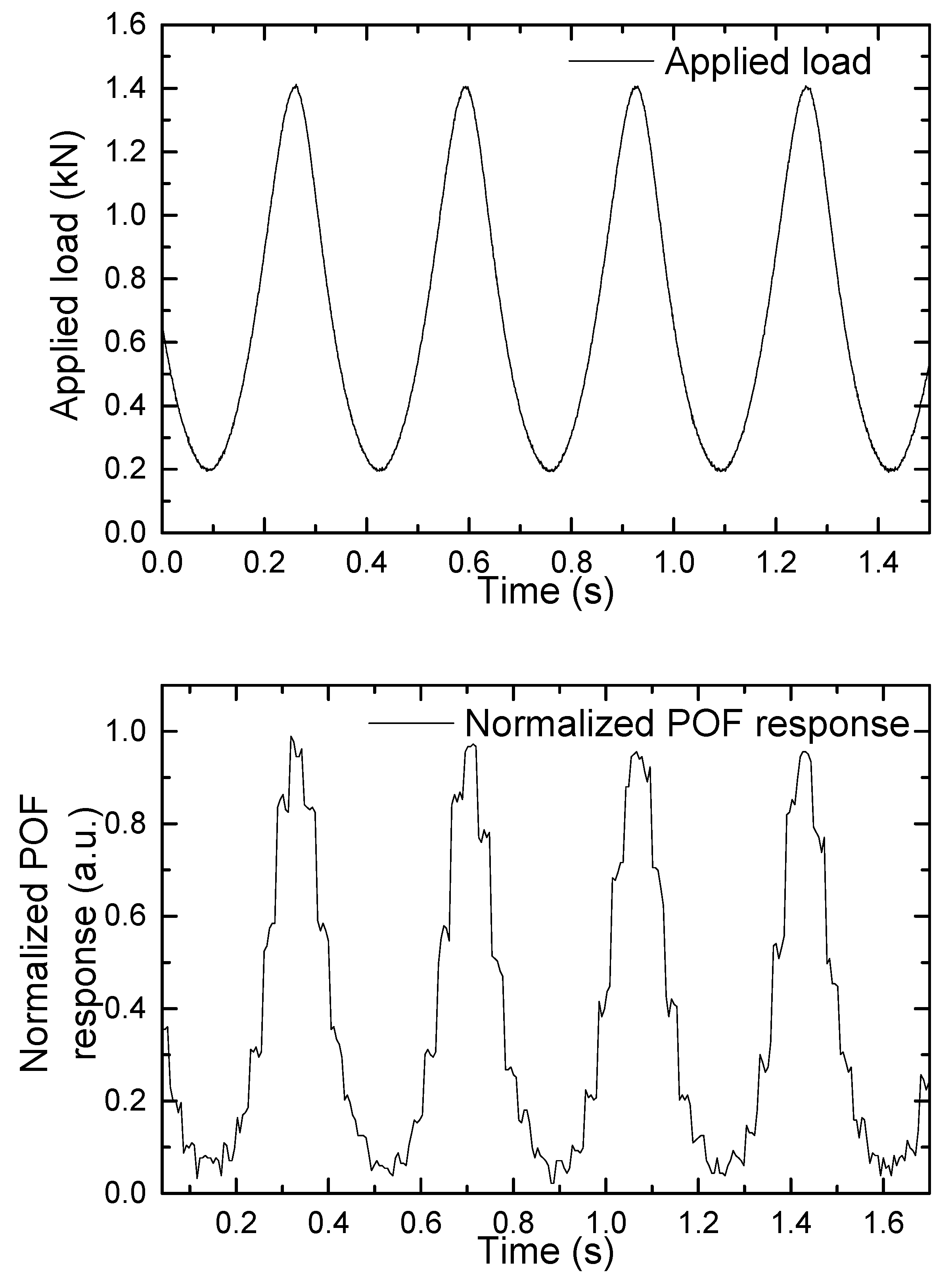
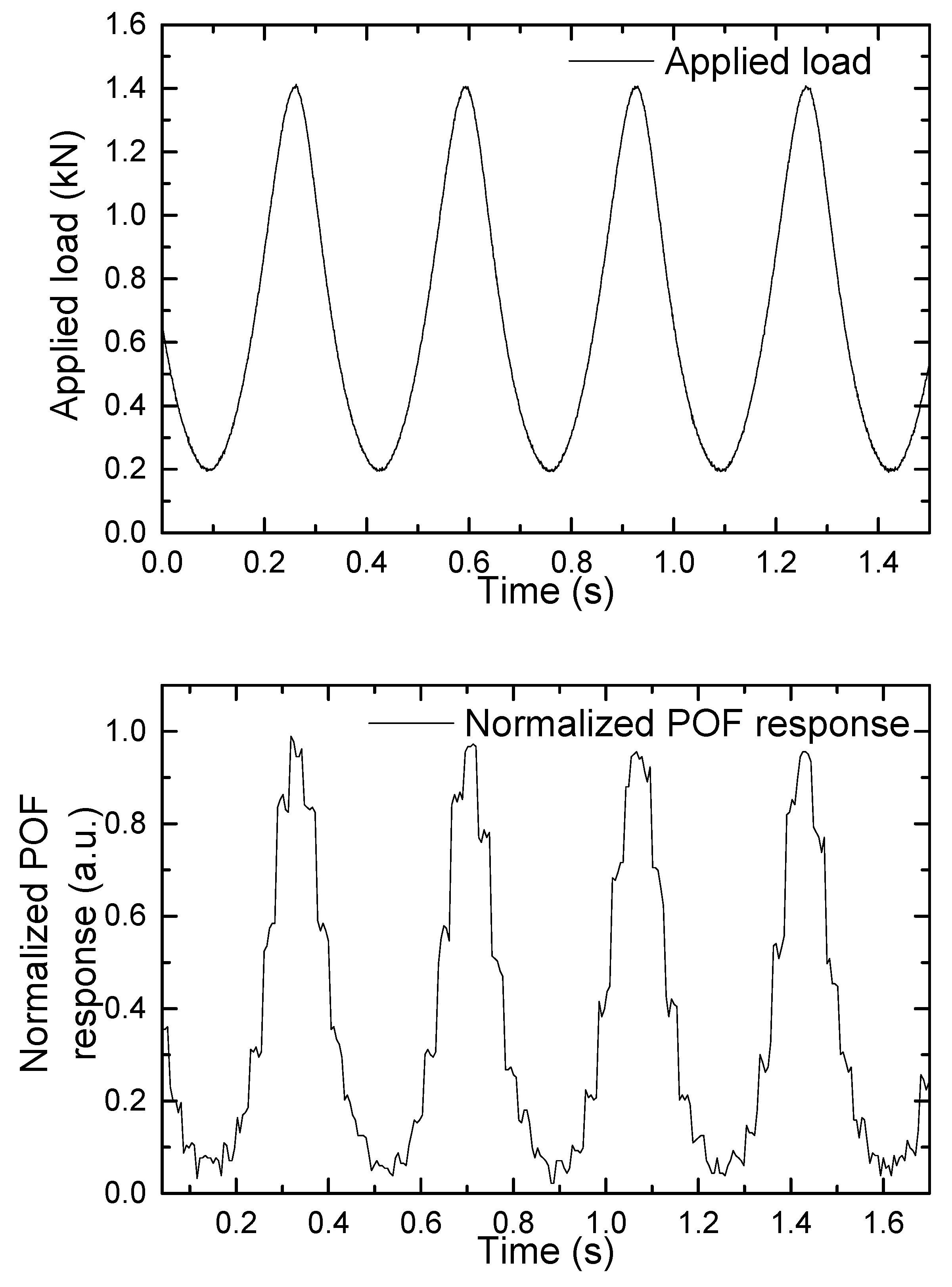
- Sinusoidal load with an amplitude of 0.6 kN and a frequency of 3 Hz to simulate running with the effect of impact loads.
2.3. Participants
3. Results and Discussion
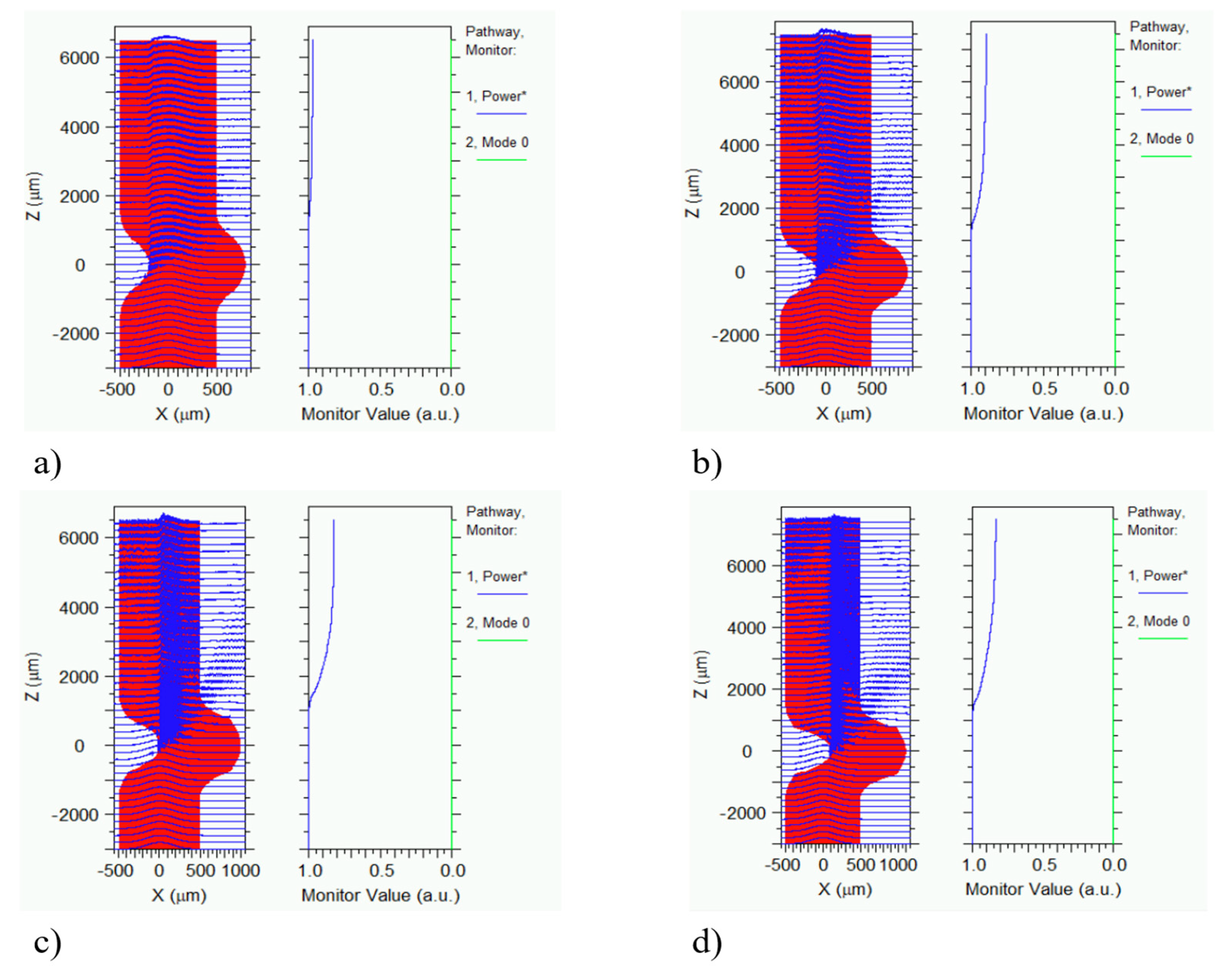
3.1. Simulations for Studying the Effect of the Bending Radius
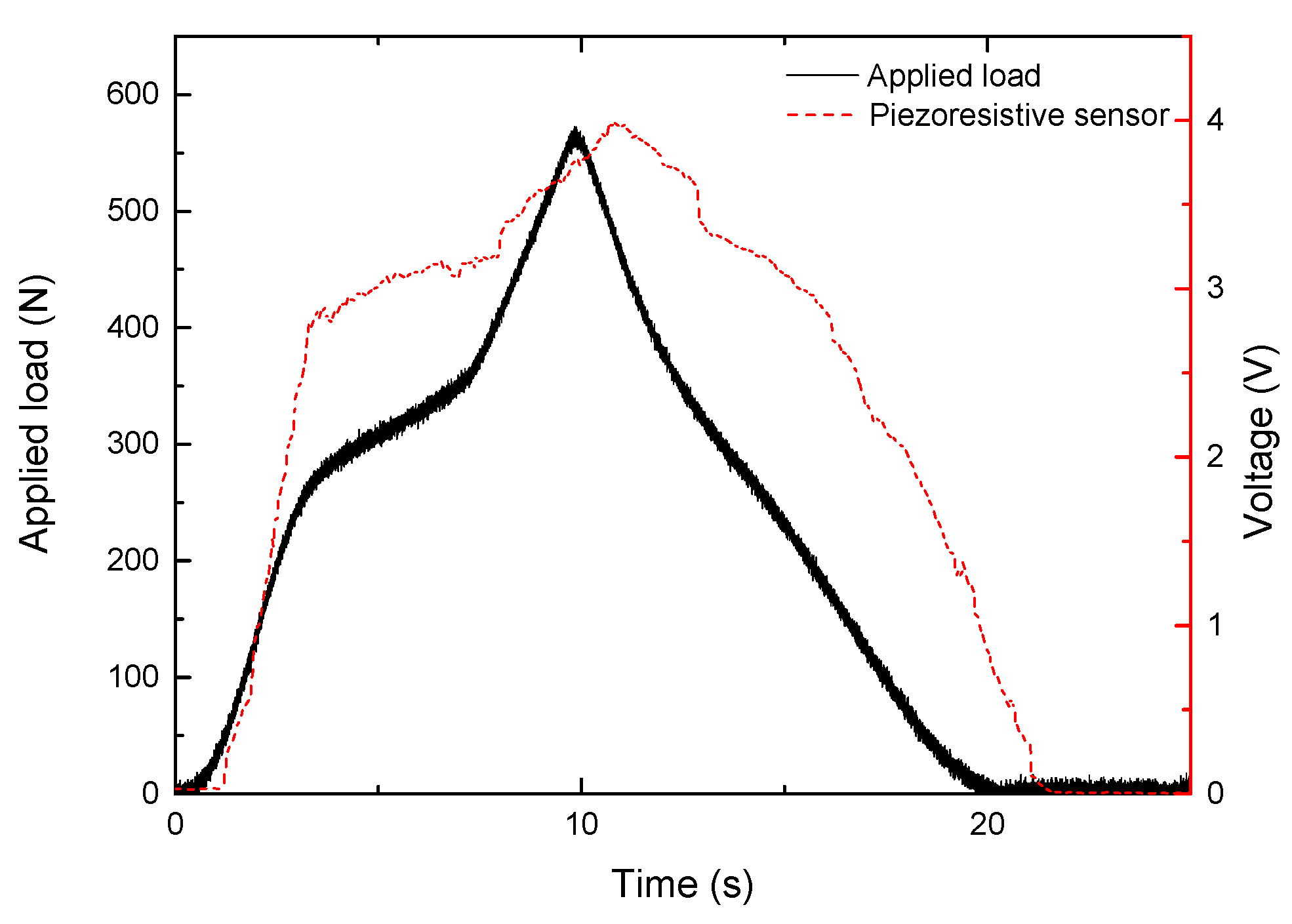
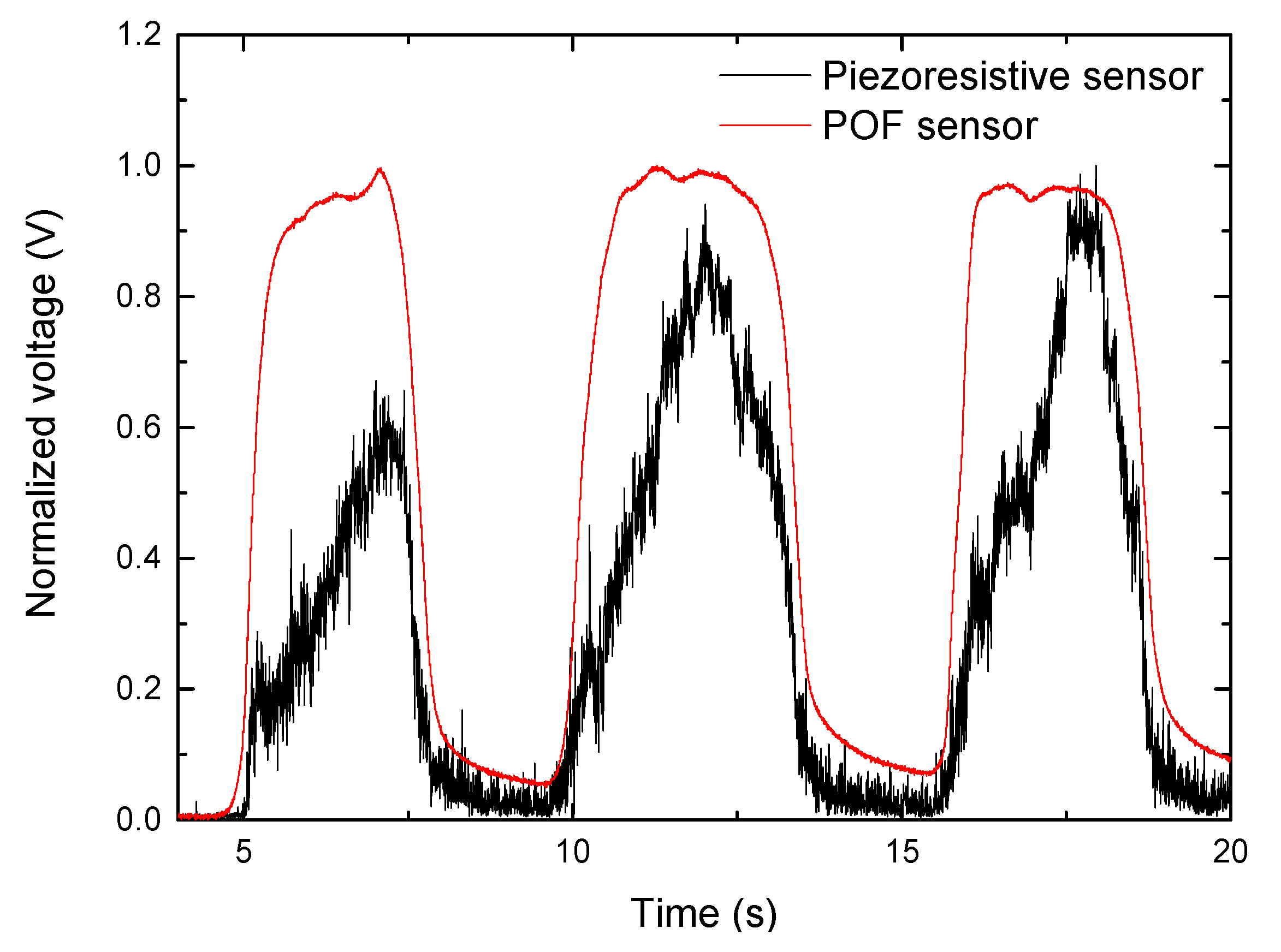
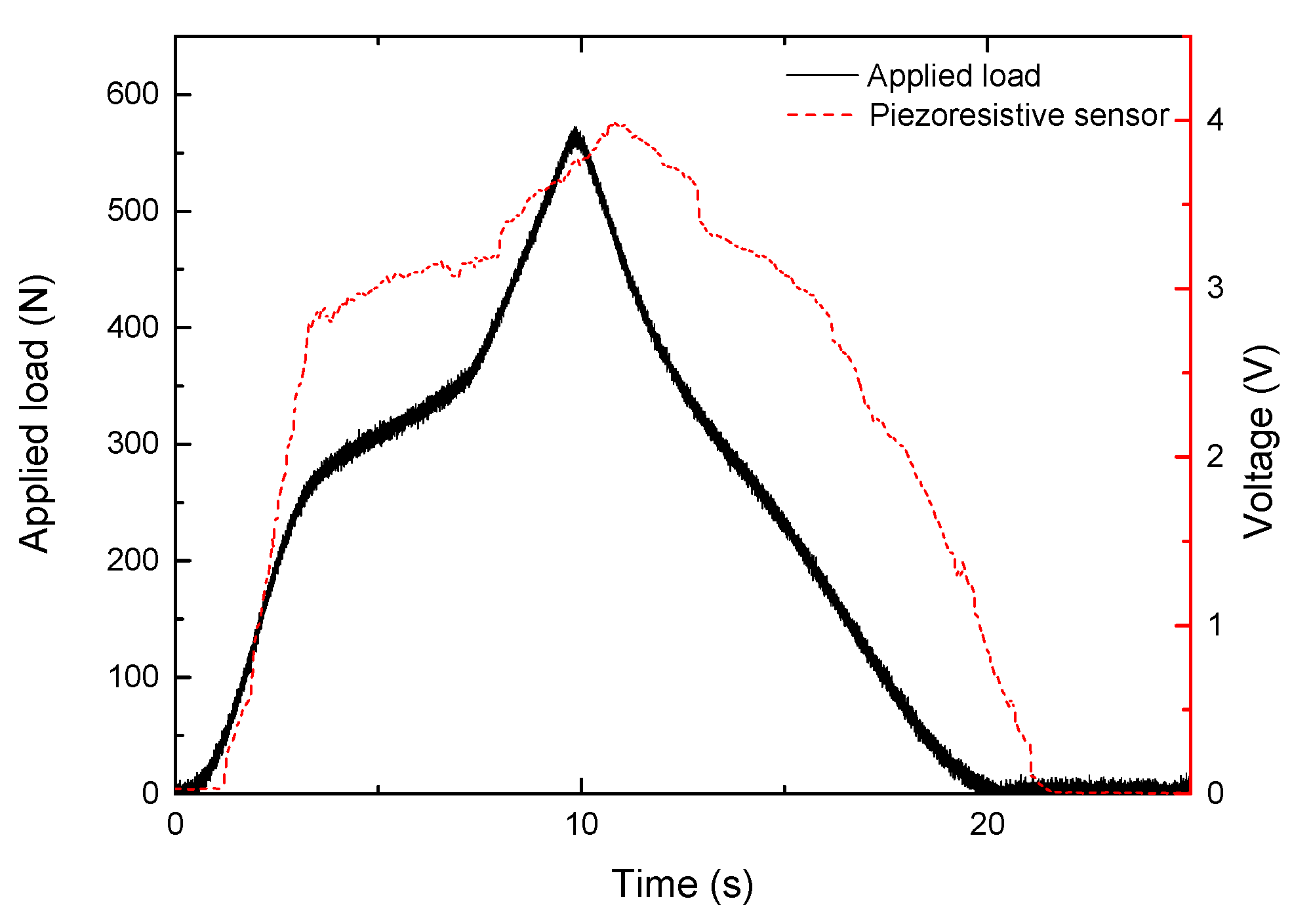
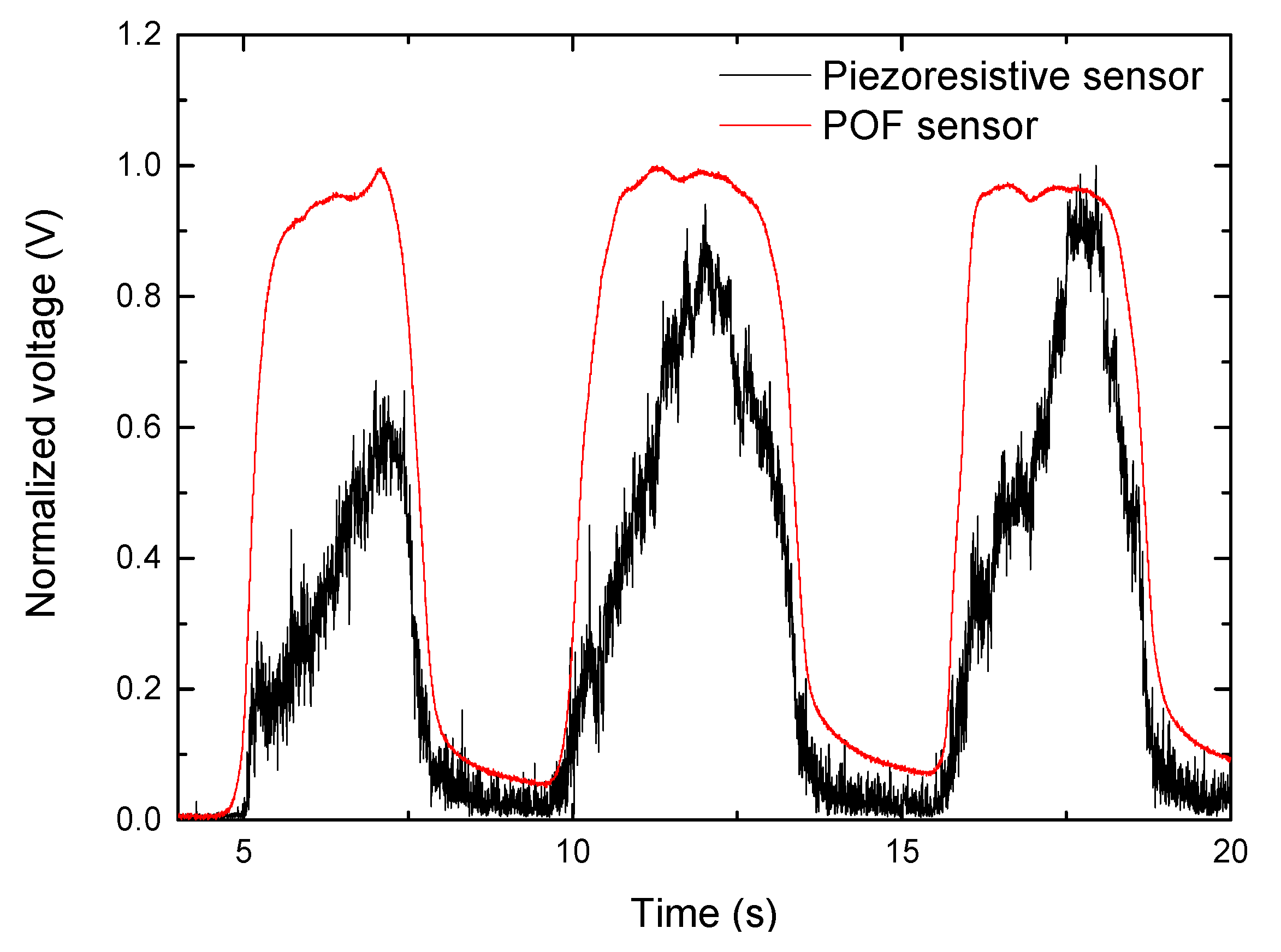
3.2. Validation of POF Response with a Commercial Piezoresistive Sensor
3.3. Validation of POF Response with a Commercial Force Platform
3.3.1. Results on Different Parts of the Insole
3.3.2. Effect of Different Insole Materials
3.4. Validation and Calibration of POF Response with Load Tests
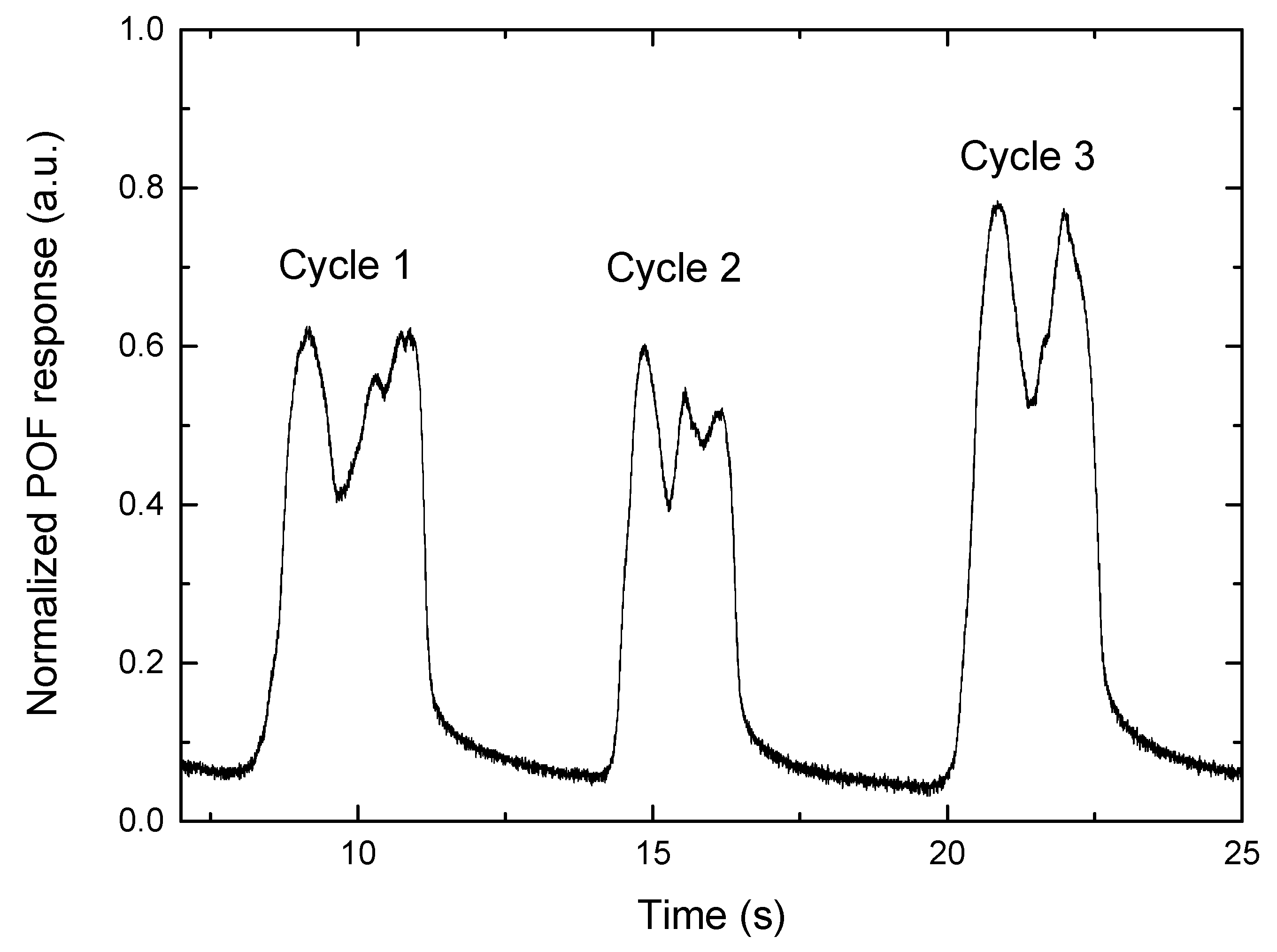
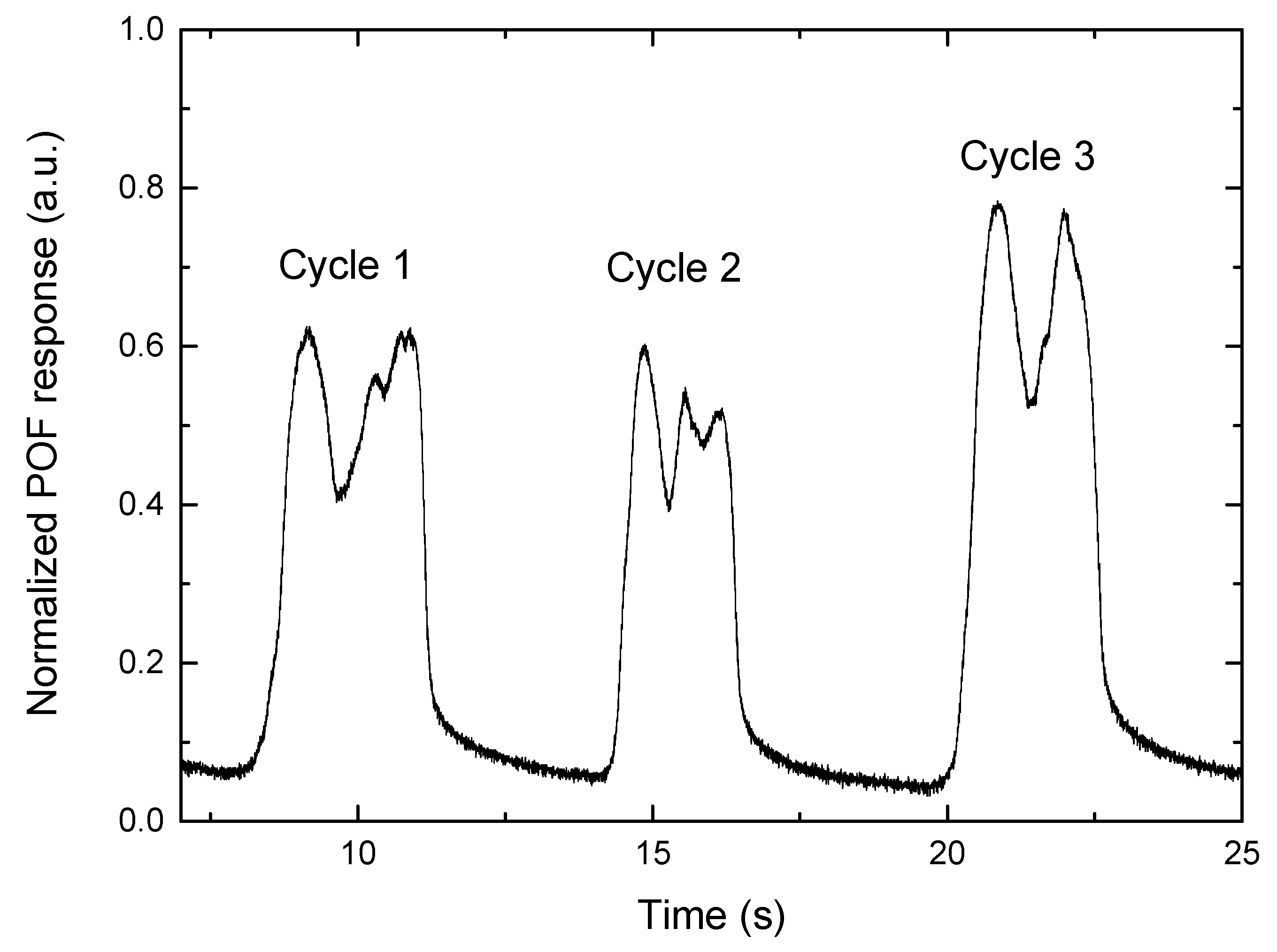
3.5. Dynamic Analysis with Participants
4. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ramirez-Bautista, J.A.; Huerta-Ruelas, J.A.; Chaparro-Cárdenas, S.L.; Hernández-Zavala, A. A Review in Detection and Monitoring Gait Disorders Using In-Shoe Plantar Measurement Systems. IEEE Rev. Biomed. Eng. 2017, 10, 299–309. [Google Scholar] [CrossRef] [PubMed]
- Bowers, A.L.; Castro, M.D. The mechanics behind the image: Foot and ankle pathology associated with gastrocnemius contracture. Semin. Musculoskelet. Radiol. 2007, 11, 83–90. [Google Scholar] [CrossRef] [PubMed]
- Wafai, L.; Zayegh, A.; Woulfe, J.; Mahfuzul, S.; Begg, R. Identification of foot pathologies based on plantar pressure asymmetry. Sensors 2015, 15, 20392–20408. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Villa-Parra, A.C.; Delisle-Rodriguez, D.; Lima, J.S.; Frizera-Neto, A.; Bastos, T. Knee impedance modulation to control an active orthosis using insole sensors. Sensors 2017, 17, 2751. [Google Scholar] [CrossRef] [Green Version]
- Oladeji, O.; Stackhouse, C.; Gracely, E.; Orlin, M. Comparison of the two-step and midgait methods of plantar pressure measurement in children. J. Am. Pod. Med. Assoc. 2008, 98, 268–277. [Google Scholar]
- Abdul Razak, A.H.; Zayegh, A.; Begg, R.K.; Wahab, Y. Foot plantar pressure measurement system: A review. Sensors 2012, 12, 9884–9912. [Google Scholar] [CrossRef] [Green Version]
- Zulkifli, S.S.; Loh, W.P. A state-of-the-art review of foot pressure. Foot Ankle Surg. 2020, 26, 25–32. [Google Scholar] [CrossRef]
- Ballaz, L.; Raison, M.; Detrembleur, C. Decomposition of the vertical ground reaction forces during gait on a single force plate. J. Musculoskelet. Neuronal Interact. 2013, 13, 236–243. [Google Scholar]
- Leal-Junior, A.G.; Domingues, M.F.; Min, R.; Vilarinho, D.; Theodosiou, A.; Tavares, C.; Alberto, N.; Leitão, C.; Kalli, K.; Frizera-Neto, A.; et al. Fiber Bragg Based Sensors for Foot Plantar Pressure Analysis. Commun. Comput. Inf. Sci. 2019, 1024, 3–25. [Google Scholar] [CrossRef]
- Wang, L.; Jones, D.; Chapman, G.J.; Siddle, H.J.; Russell, D.A.; Alazmani, A.; Culmer, P. A Review of Wearable Sensor Systems to Monitor Plantar Loading in the Assessment of Diabetic Foot Ulcers. IEEE Trans. Biomed. Eng. 2020, 67, 1989–2004. [Google Scholar] [CrossRef]
- Shu, L.; Mai, K.Y.; Tao, X.M.; Li, Y.; Wong, W.C.; Lee, K.F.; Yip, S.L.; Shum, W.H.A.; Chan, W.L.; Yuen, C.P. Monitoring diabetic patients by novel intelligent footwear system. In Proceedings of the 2012 International Conference on Computerized Healthcare (ICCH), Hong Kong, China, 17–18 December 2012; pp. 91–94. [Google Scholar] [CrossRef]
- Lin, X.; Seet, B.C. Battery-Free Smart Sock for Abnormal Relative Plantar Pressure Monitoring. IEEE Trans. Biomed. Circuits Syst. 2017, 11, 464–473. [Google Scholar] [CrossRef] [PubMed]
- Giovanelli, D.; Farella, E. Force Sensing Resistor and Evaluation of Technology for Wearable Body Pressure Sensing. J. Sensors 2016, 2016, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Del Prete, Z.; Monteleone, L.; Steindler, R. A novel pressure array sensor based on contact resistance variation: Metrological properties. Rev. Sci. Instrum. 2001, 72, 1548–1553. [Google Scholar] [CrossRef]
- Tsai, T.M.; Tsou, C.; Huang, P.W.; Lee, S.Y.; Chang, S.J. Monitoring System with Cross-Type Capacitive Plantar Pressure Sensor. IEEE Sens. J. 2020, 20, 11138–11155. [Google Scholar] [CrossRef]
- Webb, D.J. Fibre Bragg grating sensors in polymer optical fibres. Meas. Sci. Technol. 2015, 26, 092004. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, Y.; Bai, H.; Wang, G.; Hu, X.; Kumar, S.; Min, R. Biocompatible and biodegradable polymer optical fiber for biomedical application: A review. Biosensors 2021, 11, 472. [Google Scholar] [CrossRef]
- Liang, T.C.; Lin, J.J.; Guo, L.Y. Plantar pressure detection with fiber bragg gratings sensing system. Sensors 2016, 16, 1766. [Google Scholar] [CrossRef] [PubMed]
- Suresh, R.; Bhalla, S.; Hao, J.; Singh, C. Development of a high resolution plantar pressure monitoring pad based on fiber Bragg grating (FBG) sensors. Technol. Heal. Care 2015, 23, 785–794. [Google Scholar] [CrossRef]
- Domingues, M.F.; Alberto, N.; Leitao, C.S.J.; Tavares, C.; De Lima, E.R.; Radwan, A.; Sucasas, V.; Rodriguez, J.; Andre, P.S.B.; Antunes, P.F.C. Insole Optical Fiber Sensor Architecture for Remote Gait Analysis—An e-Health Solution. IEEE Internet Things J. 2019, 6, 207–214. [Google Scholar] [CrossRef] [Green Version]
- Peters, K. Polymer optical fiber sensors—A review. Smart Mater. Struct. 2011, 20, 013002. [Google Scholar] [CrossRef]
- Vilarinho, D.; Theodosiou, A.; Leitão, C.; Leal-Junior, A.G.; de Fátima Domingues, M.; Kalli, K.; André, P.; Antunes, P.; Marques, C. POFBG-embedded cork insole for plantar pressure monitoring. Sensors 2017, 17, 2924. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tavares, C.; Leite, F.; Domingues, M.D.F.; Paixao, T.; Alberto, N.; Ramos, A.; Silva, H.; Antunes, P.F.D.C. Optically Instrumented Insole for Gait Plantar and Shear Force Monitoring. IEEE Access 2021, 9, 132480–132490. [Google Scholar] [CrossRef]
- Moraleda, A.T.; Vázquez, C.; Zaballa, J.Z.; Arrue, J. Temperature sensor based on a polymer optical fiber macro-bend. Sensors 2013, 13, 13076–13089. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Montero, D.S.; Lallana, P.C.; Vázquez, C. A polymer optical fiber fuel level sensor: Application to paramotoring and powered paragliding. Sensors 2012, 12, 6186–6197. [Google Scholar] [CrossRef] [Green Version]
- Leal-Junior, A.G.; Diaz, C.A.R.; Avellar, L.M.; Pontes, M.J.; Marques, C.; Frizera, A. Polymer optical fiber sensors in healthcare applications: A comprehensive review. Sensors 2019, 19, 3156. [Google Scholar] [CrossRef] [Green Version]
- Tapetado, A.; Pinzón, P.J.; Zubia, J.; Vázquez, C. Polymer Optical Fiber Temperature Sensor With Dual-Wavelength Compensation of Power Fluctuations. J. Light. Technol. 2015, 33, 2716–2723. [Google Scholar] [CrossRef] [Green Version]
- Pinzon, P.J.; Montero, D.S.; Tapetado, A.; Vazquez, C. Dual-wavelength speckle-based SI-POF sensor for cost-effective detection of microvibrations. IEEE J. Sel. Top. Quantum Electron. 2017, 23, 217–222. [Google Scholar] [CrossRef]
- Leal-Junior, A.G.; Frizera, A.; Avellar, L.M.; Marques, C.; Pontes, M.J. Polymer Optical Fiber for In-Shoe Monitoring of Ground Reaction Forces during the Gait. IEEE Sens. J. 2018, 18, 2362–2368. [Google Scholar] [CrossRef]
- Leal-Junior, A.G.; Frizera, A.; José Pontes, M. Sensitive zone parameters and curvature radius evaluation for polymer optical fiber curvature sensors. Opt. Laser Technol. 2018, 100, 272–281. [Google Scholar] [CrossRef]
- Kamizi, M.A.; Negri, L.H.; Fabris, J.L.; Muller, M. A smartphone based fiber sensor for recognizing walking patterns. IEEE Sens. J. 2019, 19, 9782–9789. [Google Scholar] [CrossRef]
- Leal-Junior, A.G.; Díaz, C.R.; Marques, C.; Pontes, M.J.; Frizera, A. 3D-printed POF insole: Development and applications of a low-cost, highly customizable device for plantar pressure and ground reaction forces monitoring. Opt. Laser Technol. 2019, 116, 256–264. [Google Scholar] [CrossRef]
- Avellar, L.M.; Leal-Junior, A.G.; Diaz, C.A.R.; Marques, C.; Frizera, A. POF smart carpet: A multiplexed polymer optical fiber-embedded smart carpet for gait analysis. Sensors 2019, 19, 3356. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ledoux, W.R.; Wang, W.C. Composite optical bend loss sensor for pressure and shear measurement. IEEE Sens. J. 2007, 7, 1554–1565. [Google Scholar] [CrossRef]
- Zubia, J.; Arrue, J.; Mendioroz, A. Theoretical Analysis of the Torsion-Induced Optical Effect in a Plastic Optical Fiber. Opt. Fiber Technol. 1997, 3, 162–167. [Google Scholar] [CrossRef]
- Hessert, M.J.; Vyas, M.; Leach, J.; Hu, K.; Lipsitz, L.A.; Novak, V. Foot pressure distribution during walking in young and old adults. BMC Geriatr. 2005, 5, 8. [Google Scholar] [CrossRef] [Green Version]
- Leal-Junior, A.; Campos, V.; Frizera, A.; Marques, C. Low-cost and high-resolution pressure sensors using highly stretchable polymer optical fibers. Mater. Lett. 2020, 271, 127810. [Google Scholar] [CrossRef]
- Kirtley, C. Clinical Gait Analysis: Theory and Practice, 1st ed.; Elsevier: Philadelphia, PA, USA, 2006. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Type | Average Response in the Heel | Average Response in the Toe |
|---|---|---|
| POF | 0.34 (V) | 0.15 (V) |
| Force platform | 758 (gr/cm2) | 320 (gr/cm2) |
| Material/Sensor Type | Response of POF | Response of Force Platform |
|---|---|---|
| EVA | 0.34 (V) | 758 (gr/cm2) |
| PP | 0.57 (V) | 1168 (gr/cm2) |
| (EVA/PP) × 100 | 59.6% | 64.9% |
| Fiber * | Principle | Sensitivity | Shape | Measurment Range | Linearity | Losses/ Complexity | Multiplexing | Ref. |
|---|---|---|---|---|---|---|---|---|
| POF | Intensity variation | 1.03–97.66 N−1 ** | Curvature with lateral section | 0–50 N *** | _ | High/High | Yes | [33] |
| POF | Intensity variation | _ | Curvature with lateral section | 0–50 N 46–97 kg | R2 > 0.99 | High/High | Yes | [32] |
| LPS-POF | Intensity variation | 143.21 ADC/kPa | Straight | 1–4 N | Low/High | No | [37] | |
| POF | Intensity variation | 0.0086–0.0089 N−1 | Curvature with lateral section | 0–50 N 54–98 kg | High/High | No | [29] | |
| SOF | Intensity variation | 0.16–0.31 N−1 ** | Circular loop | 0–80 N | Non-linear | Low/High | No | [31] |
| POFBG | FBG | 8 pm/KPa | Straight | 0–118 N | 0.982 < R2 < 0.994 | Low/High | No | [22] |
| POF | Intensity variation | 0.00051 N−1 | Horizontal curvature | 0–2kN | R2 > 0.99 | Low/Low | No | This work |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Safarloo, S.; Núñez-Cascajero, A.; Sanchez-Gomez, R.; Vázquez, C. Polymer Optical Fiber Plantar Pressure Sensors: Design and Validation. Sensors 2022, 22, 3883. https://doi.org/10.3390/s22103883
Safarloo S, Núñez-Cascajero A, Sanchez-Gomez R, Vázquez C. Polymer Optical Fiber Plantar Pressure Sensors: Design and Validation. Sensors. 2022; 22(10):3883. https://doi.org/10.3390/s22103883
Chicago/Turabian StyleSafarloo, Sahar, Arántzazu Núñez-Cascajero, Ruben Sanchez-Gomez, and Carmen Vázquez. 2022. "Polymer Optical Fiber Plantar Pressure Sensors: Design and Validation" Sensors 22, no. 10: 3883. https://doi.org/10.3390/s22103883
APA StyleSafarloo, S., Núñez-Cascajero, A., Sanchez-Gomez, R., & Vázquez, C. (2022). Polymer Optical Fiber Plantar Pressure Sensors: Design and Validation. Sensors, 22(10), 3883. https://doi.org/10.3390/s22103883