
Novel Soft Haptic Biofeedback—Pilot Study on Postural Balance and Proprioception †


 ,
,  ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Soft Haptic System with Soft Force Sensor
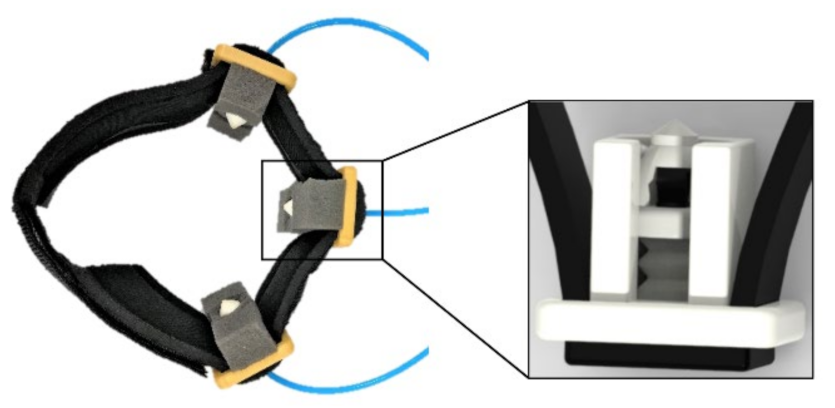
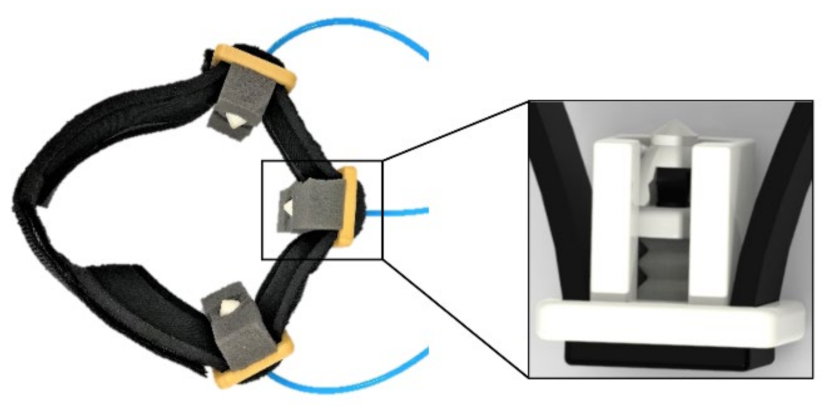
2.1. Developing the Soft Haptic System
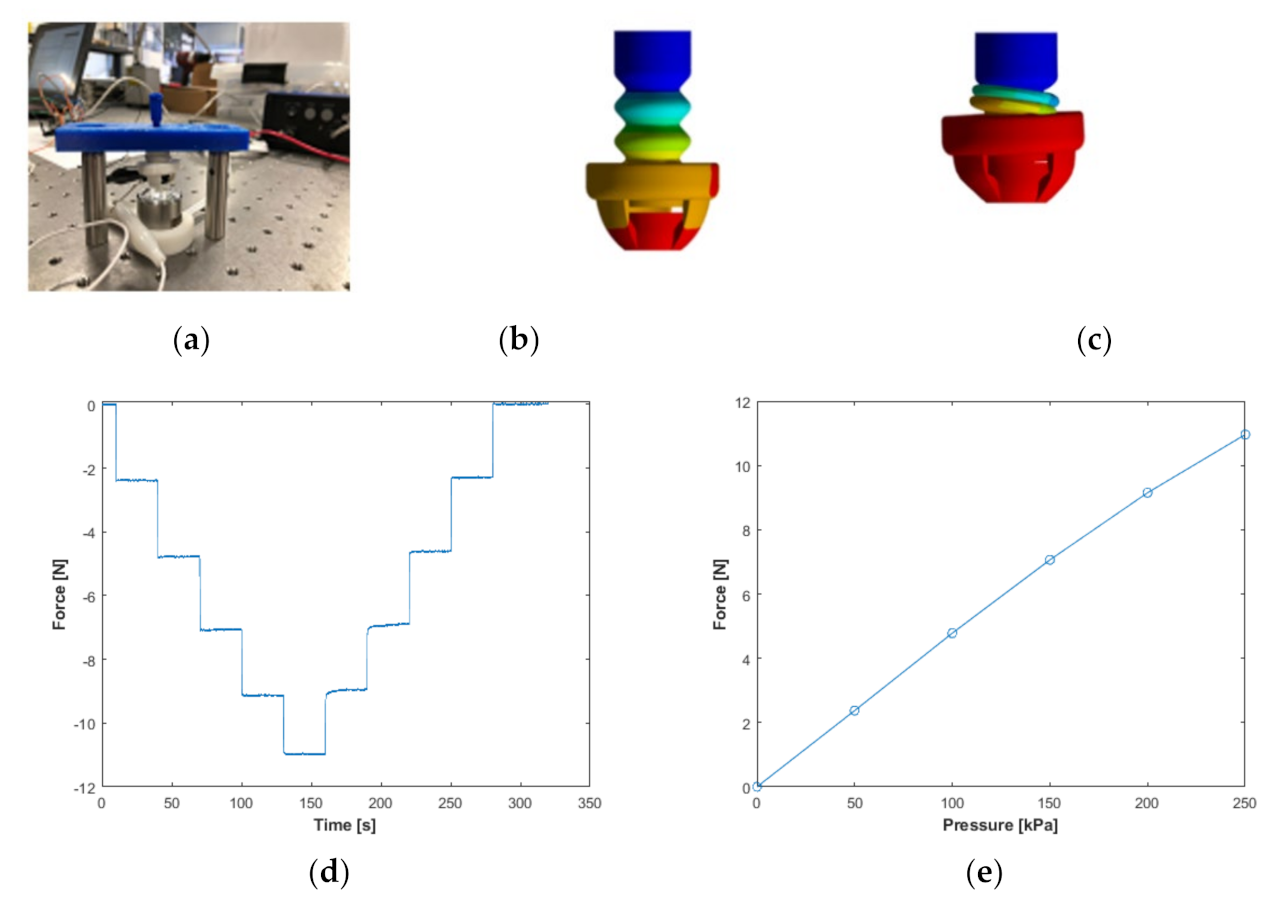
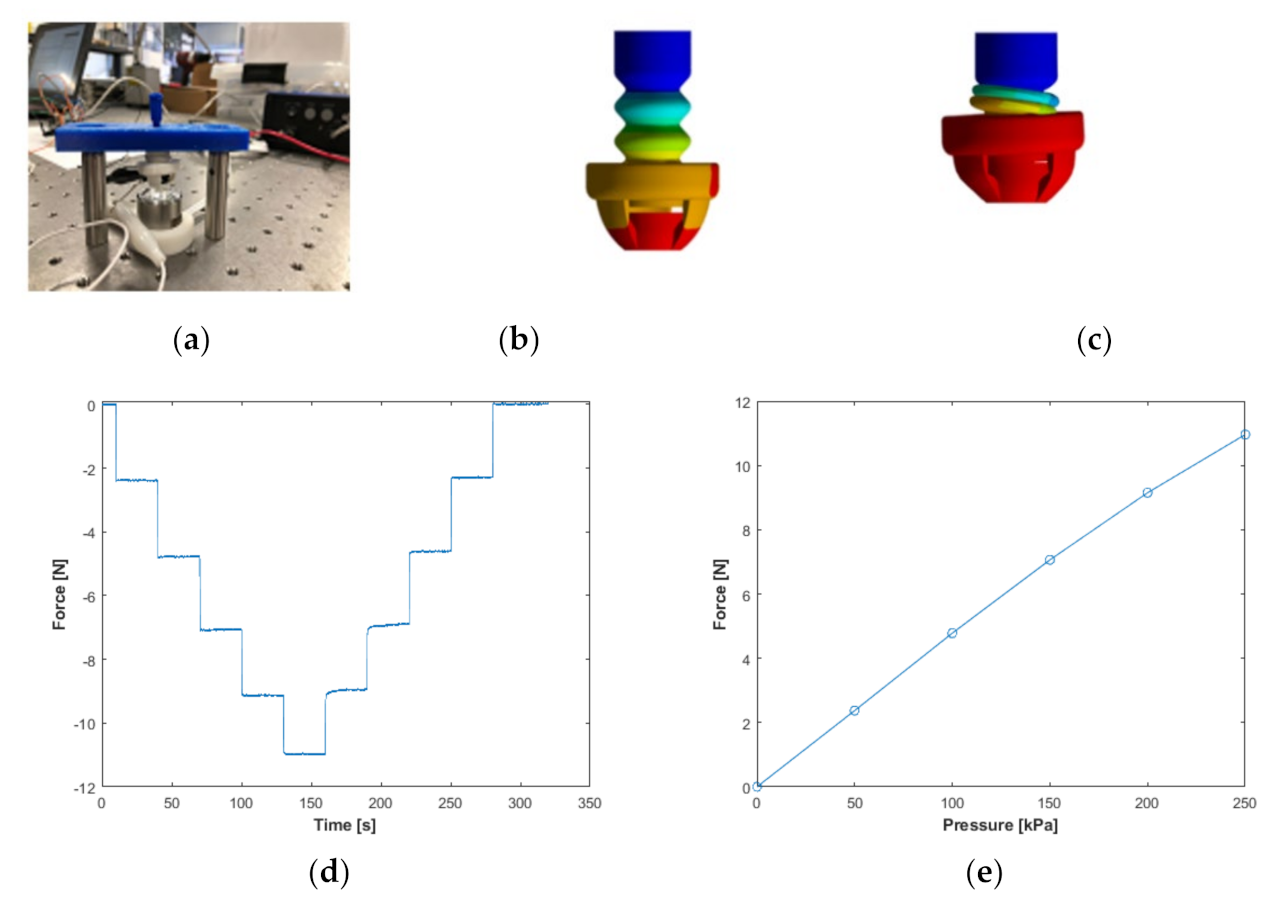
2.2. Finite Element Modelling
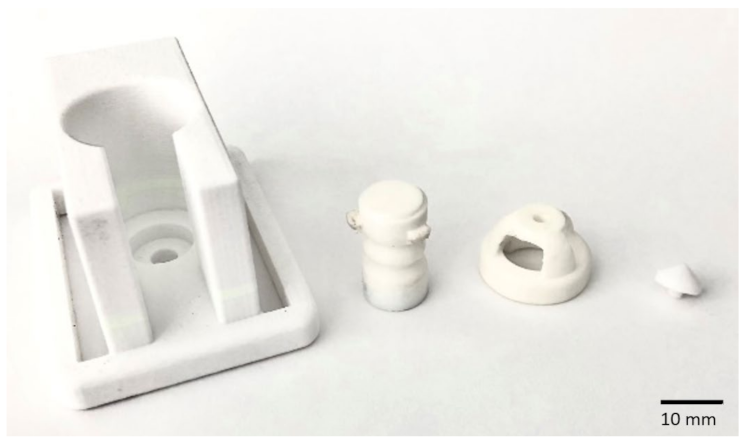
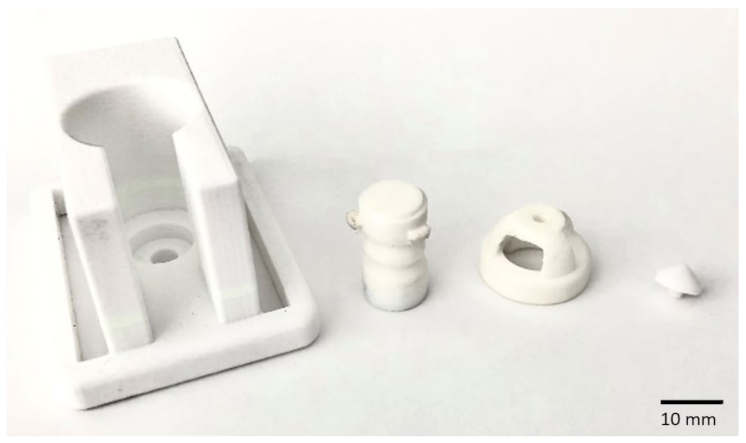
2.3. Three-Dimensional Printing
3. Biofeedback Device for Balance Improvement
3.1. Developing Pressure Control Unit
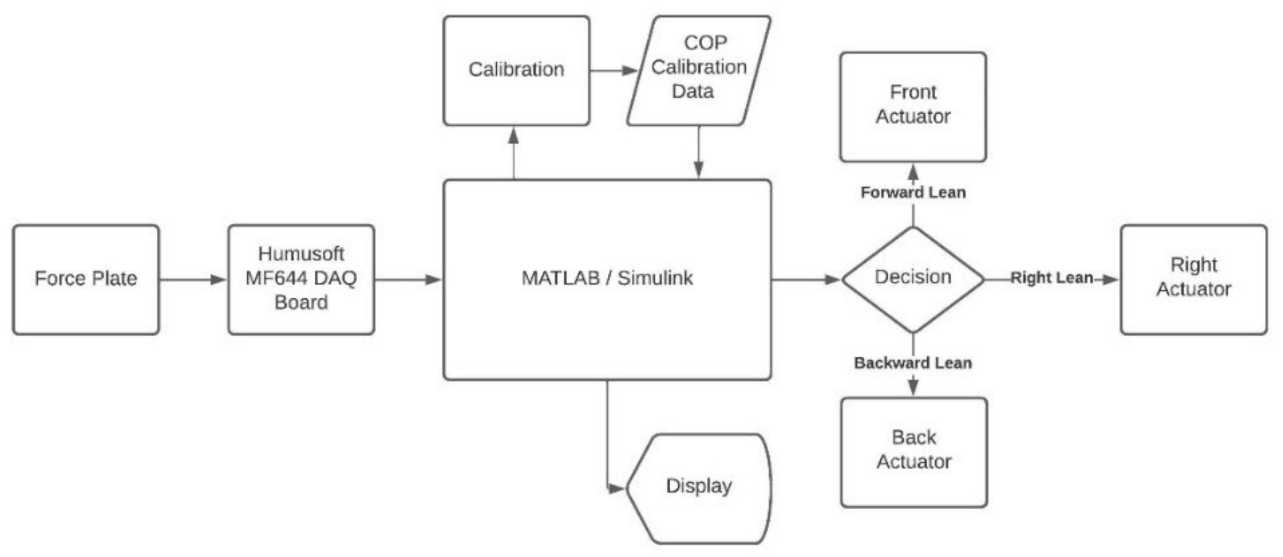
3.2. Developing Custom Force Plate to Measure CoP
4. Experiments
4.1. Experimental Procedure
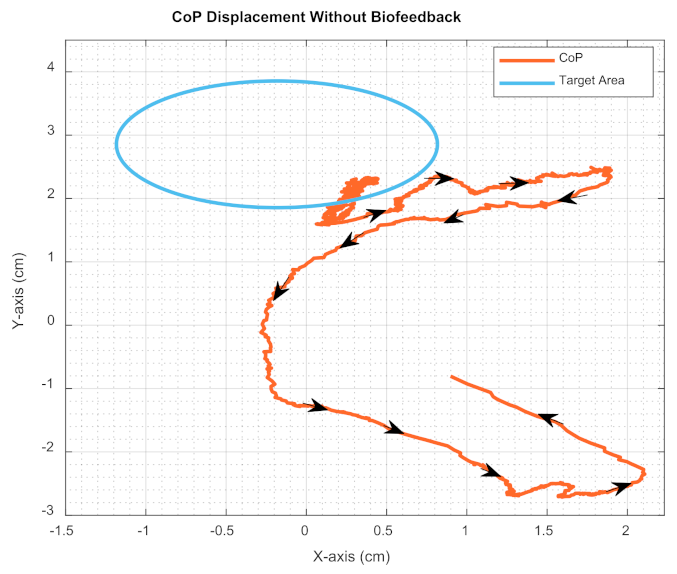
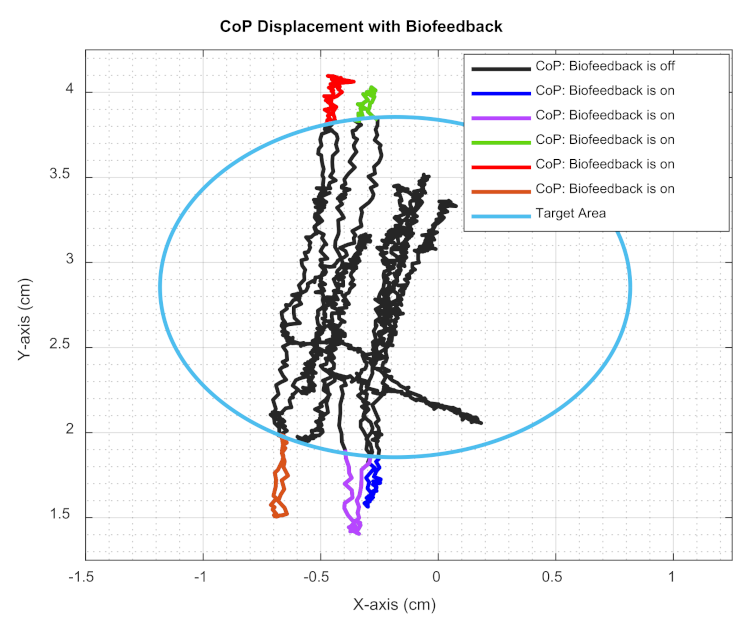
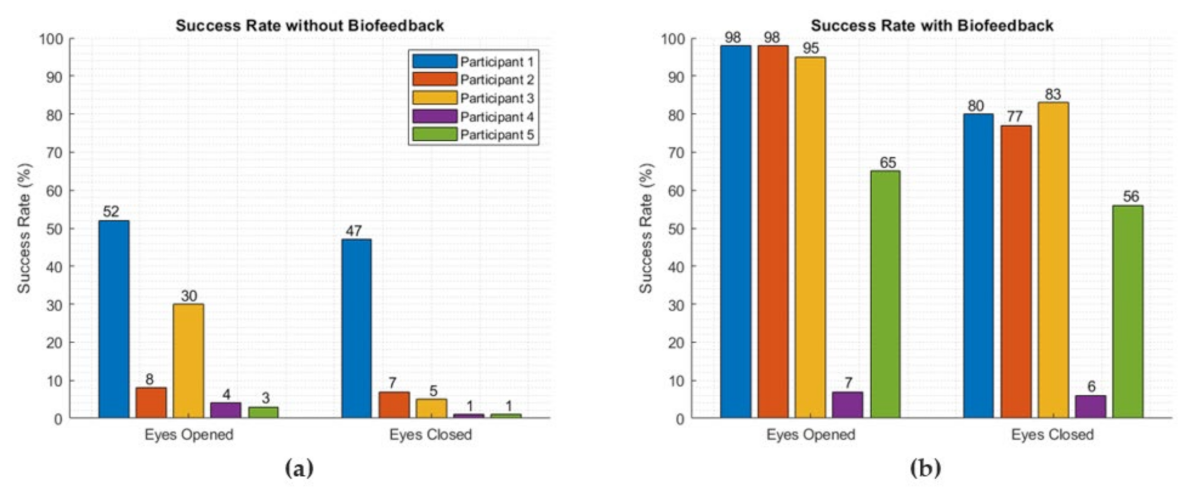
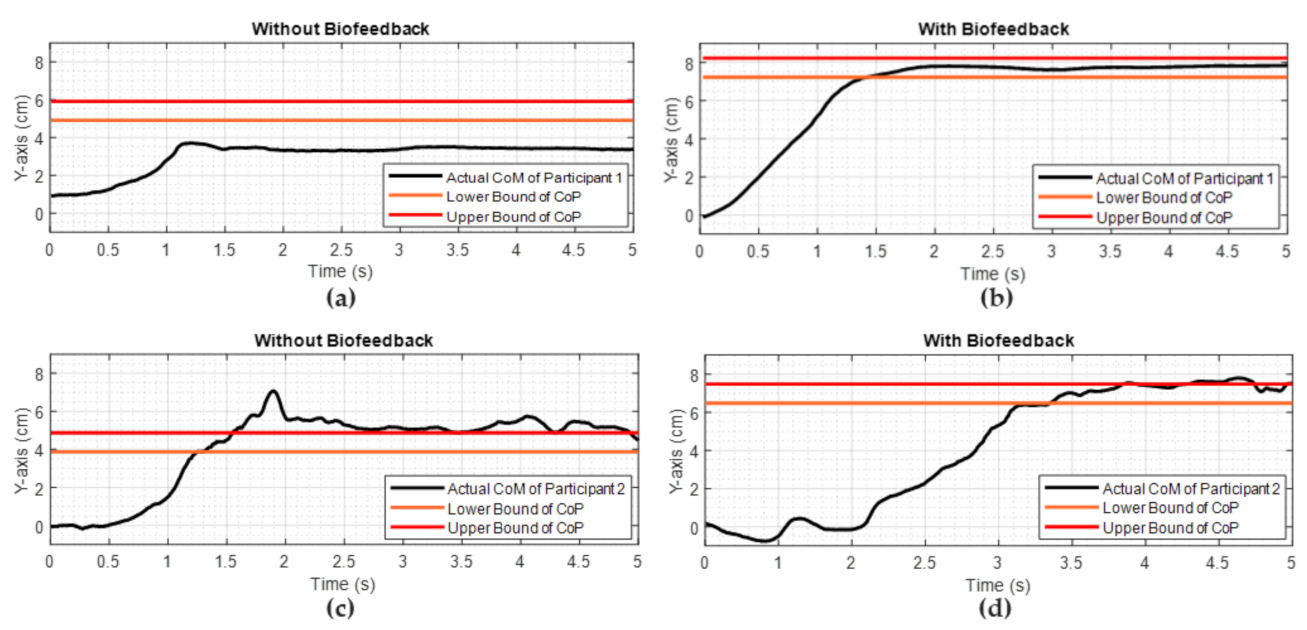
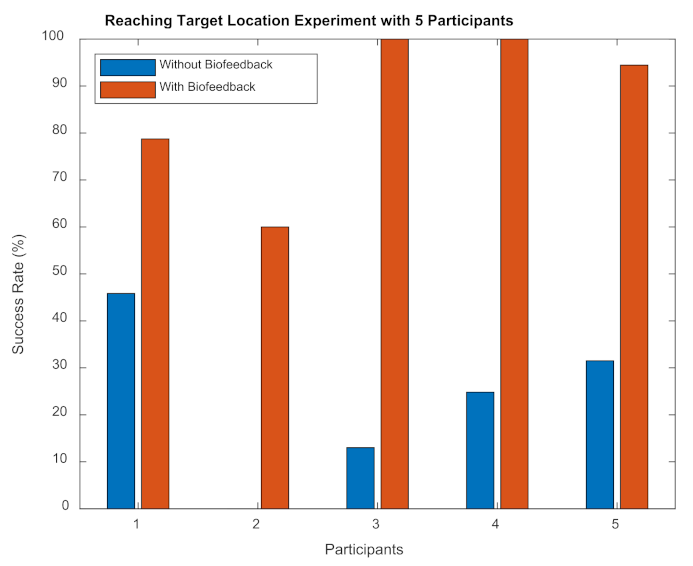
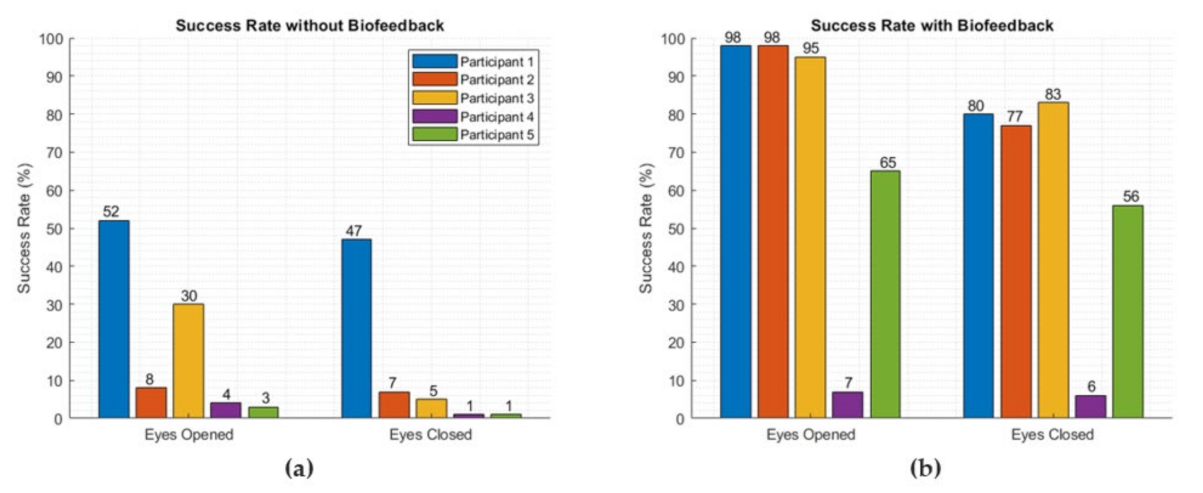
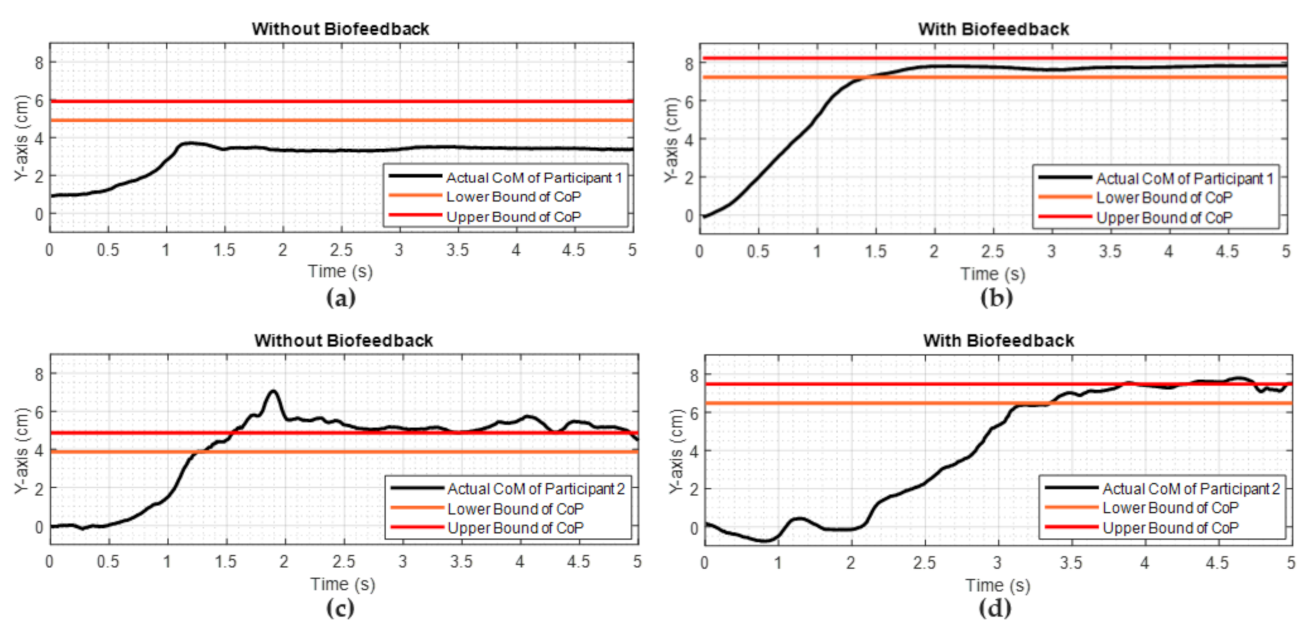
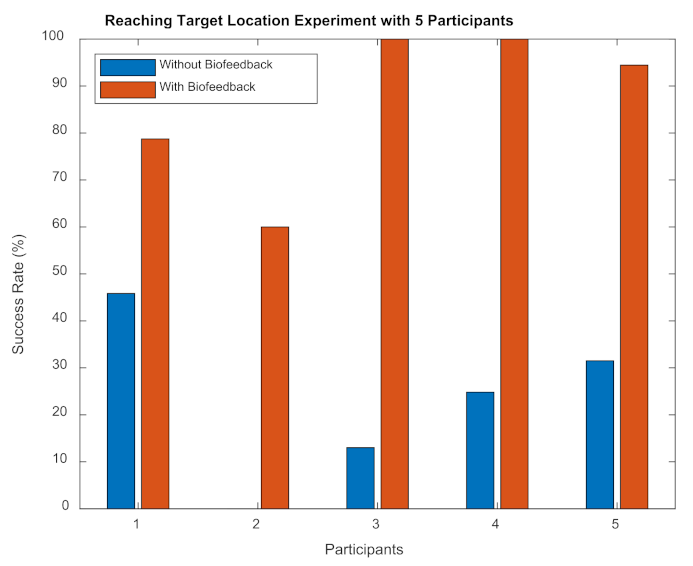
4.2. Experimental Results
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Benjamin, E.J.; Muntner, P.; Alonso, A.; Bittencourt, M.S.; Callaway, C.W.; Carson, A.P.; Chamberlain, A.M.; Chang, A.R.; Cheng, S.; Das, S.R.; et al. Heart Disease and Stroke Statistics—2019 Update: A Report From the American Heart Association. Circulation 2019, 139, e56–e528. [Google Scholar] [CrossRef] [PubMed]
- Sommerfeld, D.K.; Eek, E.U.B.; Svensson, A.K.; Holmqvist, L.W.; Von Arbin, M.H. Spasticity after stroke: Its occurrence and association with motor impairments and activity limitations. Stroke 2004, 35, 134–139. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lundström, E.; Smits, A.; Terént, A.; Borg, J. Time-course and determinants of spasticity during the first six months following first-ever stroke. J. Rehabil. Med. 2010, 42, 296–301. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hsu, A.-L.; Tang, P.-F.; Jan, M.-H. Analysis of impairments influencing gait velocity and asymmetry of hemiplegic patients after mild to moderate stroke. Arch. Phys. Med. Rehabil. 2003, 84, 1185–1193. [Google Scholar] [CrossRef]
- Stanton, R.; Ada, L.; Dean, C.M.; Preston, E. Biofeedback improves performance in lower limb activities more than usual therapy in people following stroke: A systematic review. J. Physiother. 2017, 63, 11–16. [Google Scholar] [CrossRef] [Green Version]
- Albert, S.J.; Kesselring, J. Neurorehabilitation of stroke. J. Neurol. 2012, 259, 817–832. [Google Scholar] [CrossRef]
- Díez-Tejedor, E.; Fuentes, B. Acute Care in Stroke: The Importance of Early Intervention to Achieve Better Brain Protection. Cerebrovasc. Dis. 2004, 17, 130–137. [Google Scholar] [CrossRef]
- Stephens-Fripp, B.; Alici, G.; Mutlu, R. A Review of Non-Invasive Sensory Feedback Methods for Transradial Prosthetic Hands. IEEE Access 2018, 6, 6878–6899. [Google Scholar] [CrossRef]
- Witteveen, H.J.B.; Droog, E.A.; Rietman, J.S.; Veltink, P.H. Vibro- and Electrotactile User Feedback on Hand Opening for Myoelectric Forearm Prostheses. IEEE Trans. Biomed. Eng. 2012, 59, 2219–2226. [Google Scholar] [CrossRef]
- Margheri, L.; Trimmer, B. Soft Robotics Community Events: Meeting Different Backgrounds for Common Challenges. Soft Robot. 2014, 1, 236–238. [Google Scholar] [CrossRef]
- Tawk, C.; Sariyildiz, E.; Alici, G. Force Control of a 3D Printed Soft Gripper with Built-In Pneumatic Touch Sensing Chambers. Soft Robot. 2021. ahead of print. [Google Scholar] [CrossRef] [PubMed]
- Tawk, C.; Zhou, H.; Sariyildiz, E.; Panhuis, M.i.h.; Spinks, G.M.; Alici, G. Design, Modeling, and Control of a 3D Printed Monolithic Soft Robotic Finger With Embedded Pneumatic Sensing Chambers. IEEE/ASME Trans. Mechatron. 2021, 26, 876–887. [Google Scholar] [CrossRef]
- Mutlu, R.; Alici, G.; in het Panhuis, M.; Spinks, G.M. 3D Printed Flexure Hinges for Soft Monolithic Prosthetic Fingers. Soft Robot. 2016, 3, 120–133. [Google Scholar] [CrossRef]
- Whitesides, G.M. Soft Robotics. Angew. Chem. Int. Ed. 2018, 57, 4258–4273. [Google Scholar] [CrossRef] [PubMed]
- Laschi, C.; Mazzolai, B.; Cianchetti, M. Soft robotics: Technologies and systems pushing the boundaries of robot abilities. Sci. Robot. 2016, 1, eaah3690. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hu, Y.; Zhao, Z.; Vimal, A.; Hoffman, G. Soft skin texture modulation for social robotics. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 182–187. [Google Scholar]
- Sariyildiz, E.; Chen, G.; Yu, H. An Acceleration-Based Robust Motion Controller Design for a Novel Series Elastic Actuator. IEEE Trans. Ind. Electron. 2016, 63, 1900–1910. [Google Scholar] [CrossRef]
- Abd, M.A.; Bornstein, M.M.; Tognoli, E.; Engeberg, E.D. Armband with Soft Robotic Actuators and Vibrotactile Stimulators for Bimodal Haptic Feedback from a Dexterous Artificial Hand. In Proceedings of the 2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Auckland, New Zealand, 9–12 July 2018; pp. 13–20. [Google Scholar]
- Zhao, H.; Hussain, A.M.; Israr, A.; Vogt, D.M.; Duduta, M.; Clarke, D.R.; Wood, R.J. A Wearable Soft Haptic Communicator Based on Dielectric Elastomer Actuators. Soft Robot. 2020, 7, 451–461. [Google Scholar] [CrossRef]
- Mutlu, R.; Singh, D.; Tawk, C.; Sencadas, V.; Sariyildiz, E.; Alici, G. A 3D Printed Soft Haptic Device with Built-in Force Sensing to Induce Biofeedback. Soft Robot. 2022. under revision. [Google Scholar]
- Anver, H.; Mutlu, R.; Alici, G. 3D Printing of a Thin-Wall Soft and Monolithic Gripper Using Fused Filament Fabri-cation. In Proceedings of the IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Munich, Germany, 3–7 July 2017. [Google Scholar]
- Sencadas, V.; Mutlu, R.; Alici, G. Large area and ultra-thin compliant strain sensors for prosthetic devices. Sens. Actuators A Phys. 2017, 266, 56–64. [Google Scholar] [CrossRef] [Green Version]
- Singh, D.; Tawk, C.; Mutlu, R.; Sencadas, V.; Alici, G. A 3D Printed Soft Force Sensor for Soft Haptics. In Proceedings of the 3rd IEEE International Conference on Soft Robotics (RoboSoft), New Haven, CT, USA, 15 May–15 July 2020; pp. 458–463. [Google Scholar]
- Tawk, C.; Panhuis, M.i.h.; Spinks, G.M.; Alici, G. Bioinspired 3D Printable Soft Vacuum Actuators for Locomotion Robots, Grippers and Artificial Muscles. Soft Robot. 2018, 5, 685–694. [Google Scholar] [CrossRef]
- Singh, D.; Tawk, C.; Mutlu, R.; Sariyildiz, E.; Alici, G. A 3D Printed Soft Robotic Monolithic Unit for Haptic Feedback Devices. In Proceedings of the 2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Hong Kong, China, 8–12 July 2019; pp. 388–393. [Google Scholar]
- Hu, X.; Zhao, J.; Peng, D.; Sun, Z.; Qu, X. Estimation of Foot Plantar Center of Pressure Trajectories with Low-Cost Instrumented Insoles Using an Individual-Specific Nonlinear Model. Sensors 2018, 18, 421. [Google Scholar] [CrossRef] [PubMed] [Green Version]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aydin, M.; Mutlu, R.; Singh, D.; Sariyildiz, E.; Coman, R.; Mayland, E.; Shemmell, J.; Lee, W. Novel Soft Haptic Biofeedback—Pilot Study on Postural Balance and Proprioception. Sensors 2022, 22, 3779. https://doi.org/10.3390/s22103779
Aydin M, Mutlu R, Singh D, Sariyildiz E, Coman R, Mayland E, Shemmell J, Lee W. Novel Soft Haptic Biofeedback—Pilot Study on Postural Balance and Proprioception. Sensors. 2022; 22(10):3779. https://doi.org/10.3390/s22103779
Chicago/Turabian StyleAydin, Mert, Rahim Mutlu, Dilpreet Singh, Emre Sariyildiz, Robyn Coman, Elizabeth Mayland, Jonathan Shemmell, and Winson Lee. 2022. "Novel Soft Haptic Biofeedback—Pilot Study on Postural Balance and Proprioception" Sensors 22, no. 10: 3779. https://doi.org/10.3390/s22103779
APA StyleAydin, M., Mutlu, R., Singh, D., Sariyildiz, E., Coman, R., Mayland, E., Shemmell, J., & Lee, W. (2022). Novel Soft Haptic Biofeedback—Pilot Study on Postural Balance and Proprioception. Sensors, 22(10), 3779. https://doi.org/10.3390/s22103779