
Multi-AP and Test Point Accuracy of the Results in WiFi Indoor Localization




Abstract
:
1. Introduction
- Developed and implemented a new self-adaptive multi-AP localization algorithm that improves MoLA system performance;
- Performed a comprehensive statistical analysis of individual TP localization accuracy;
- Analyzed the effects of TP location in the room setup on localization accuracy. We identified and described key factors that affect the individual TP and the overall localization accuracy.
2. Related Work
2.1. AoA-Based Systems
2.2. Range-Based Systems
2.3. Learning-Based Systems
2.4. Single-AP MoLA
3. Background
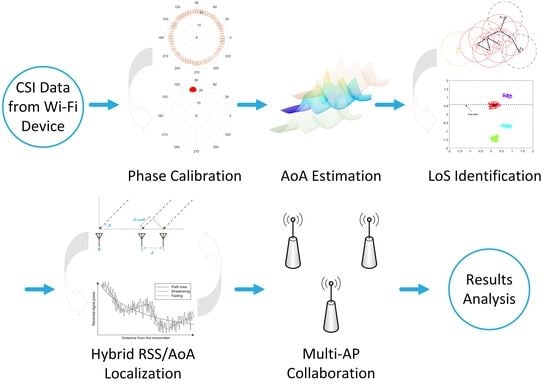
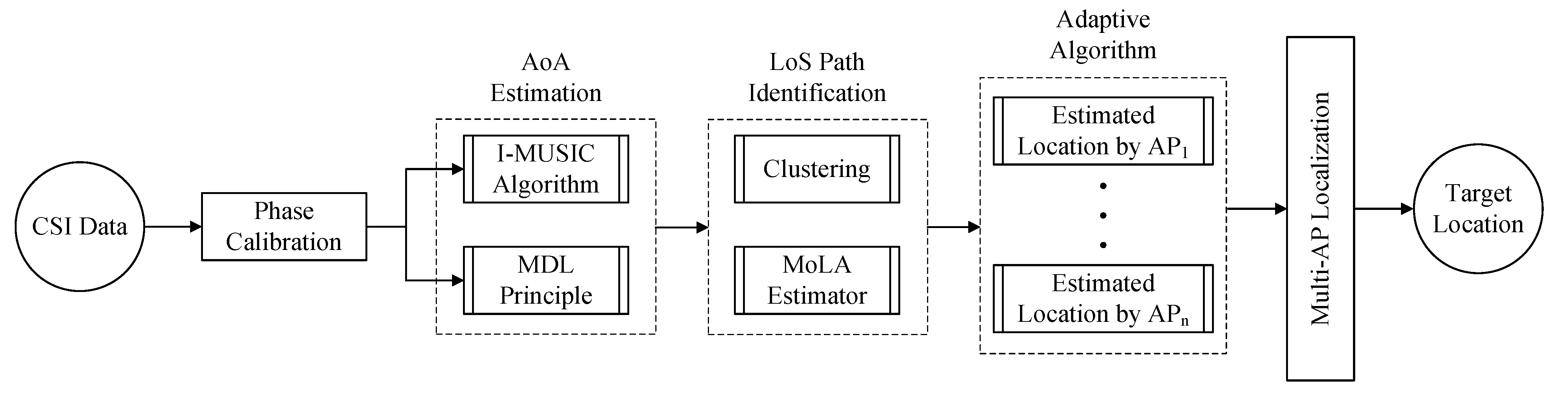
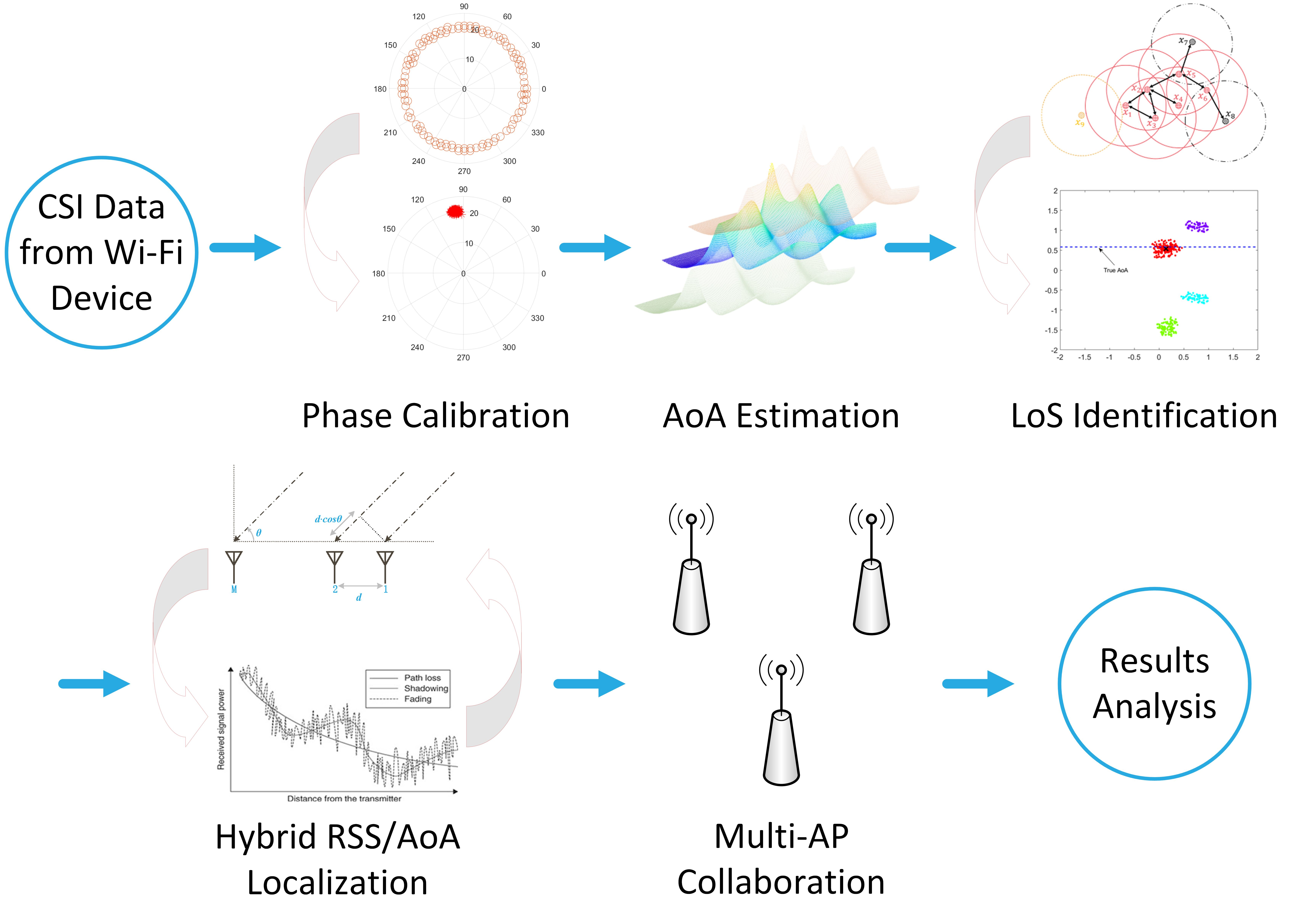
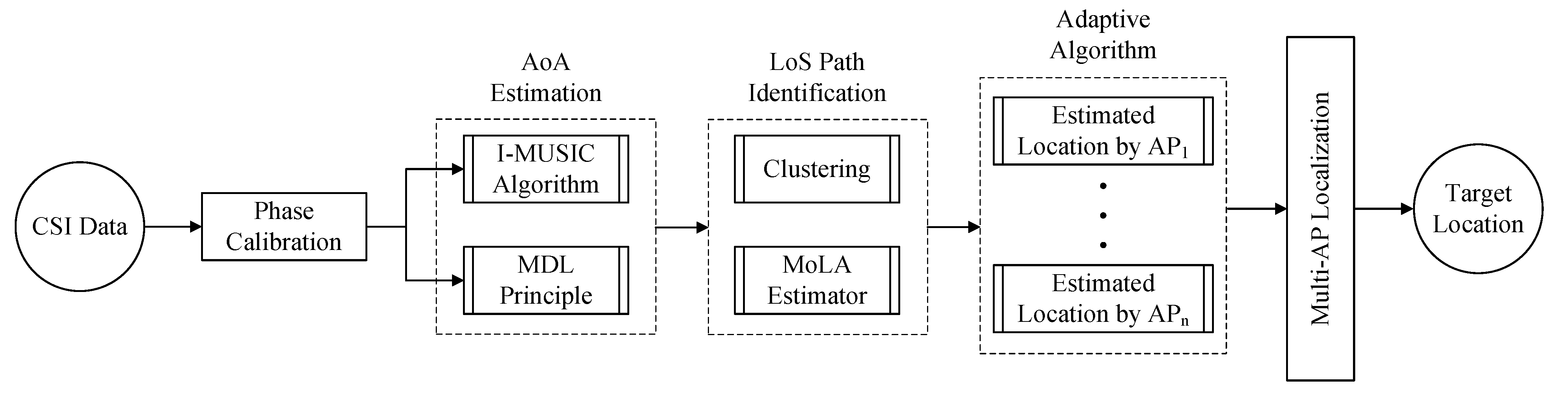
4. MoLA: Design and Optimization
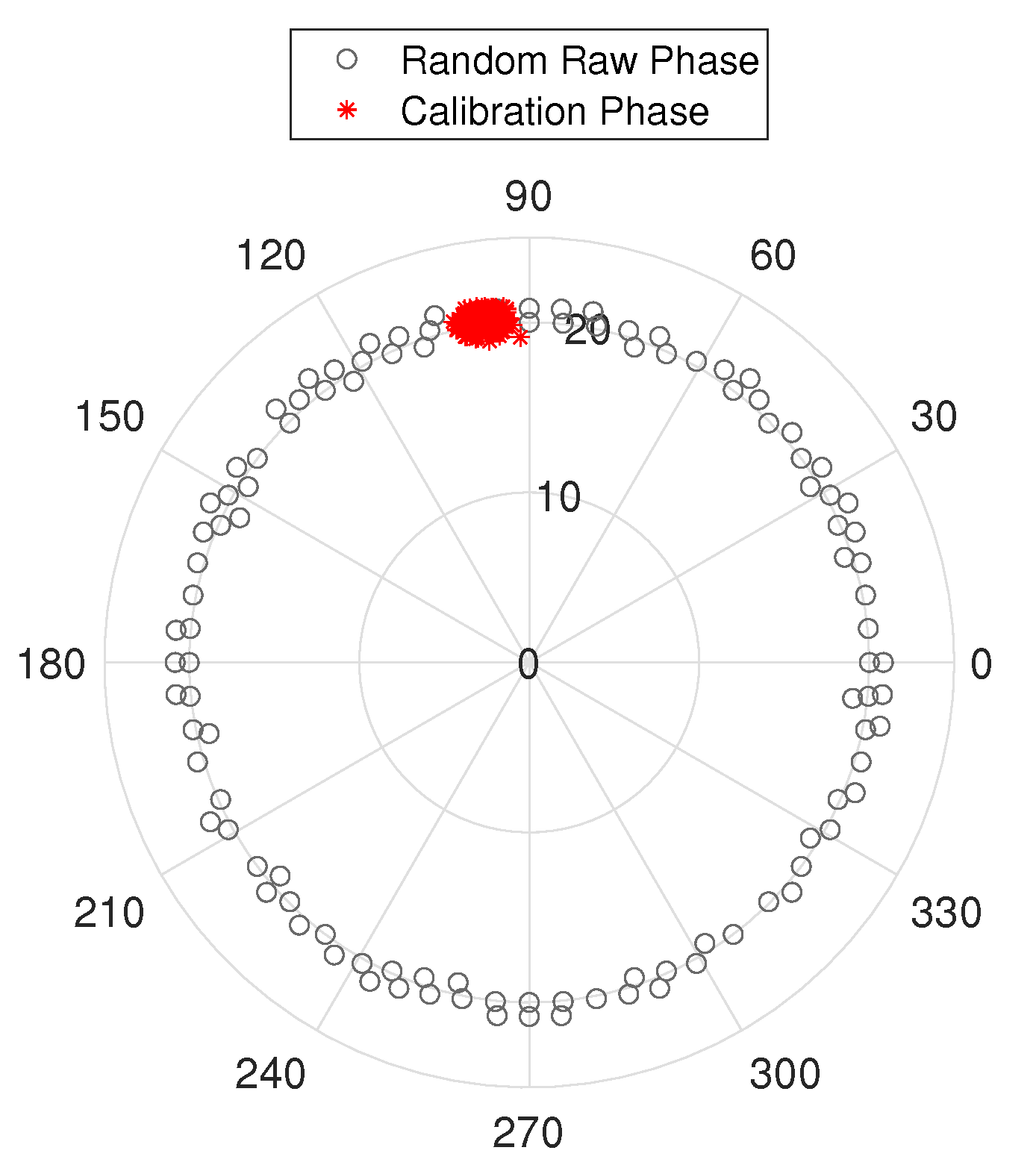
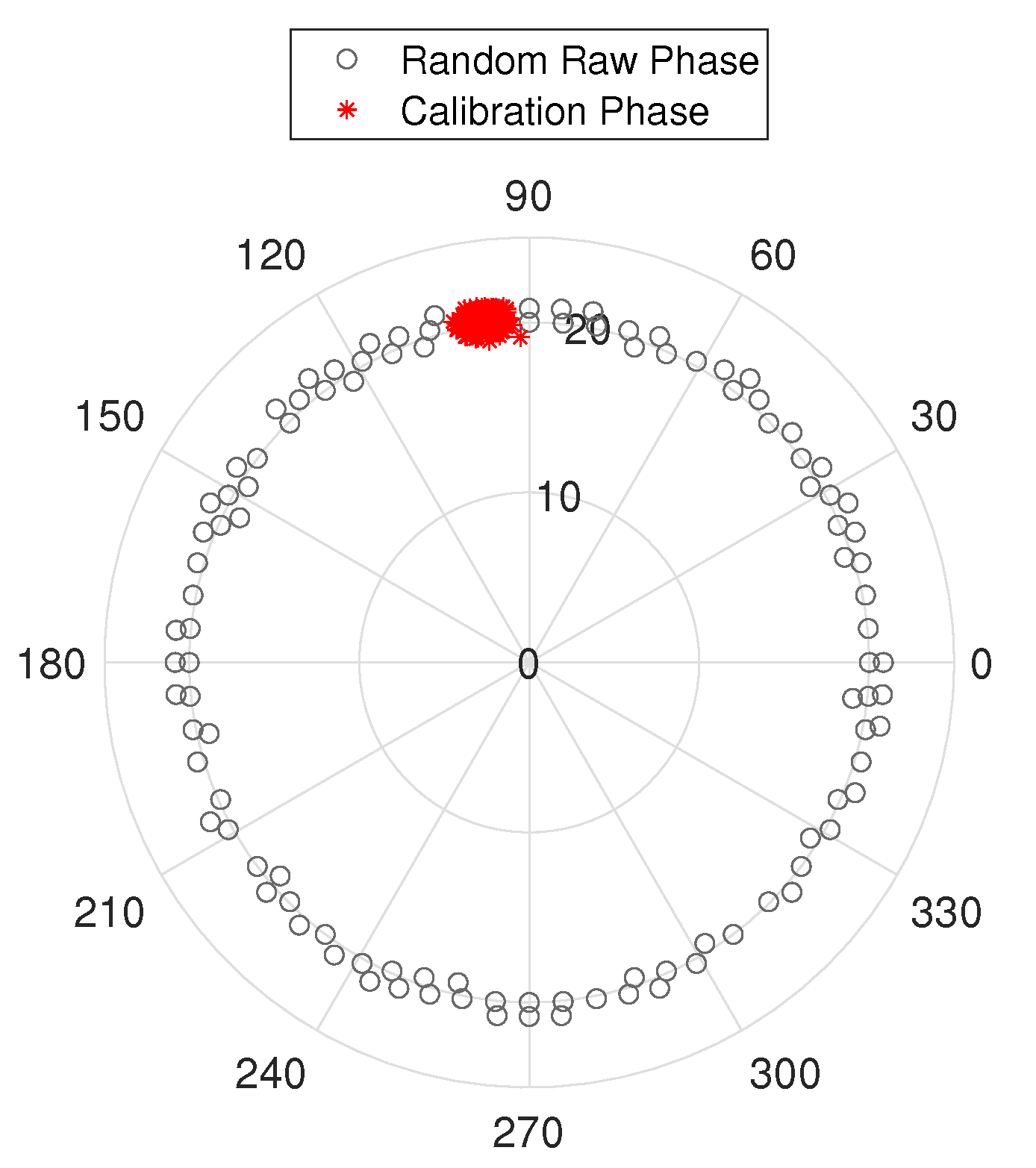
4.1. Pre-Processing of CSI
| Algorithm 1: Phase calibration. |
 |
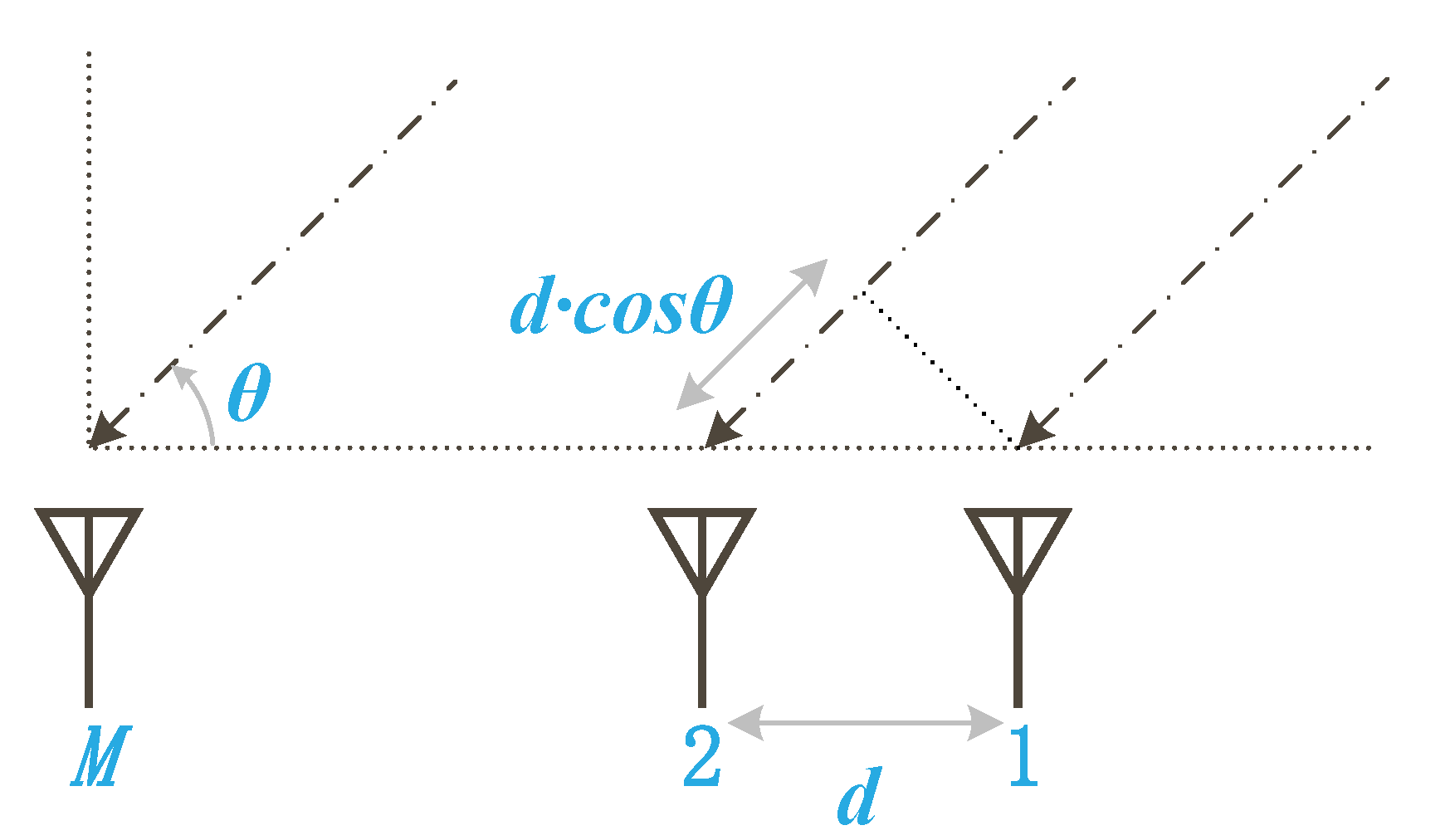
4.2. Estimating the AoAs with Improved MUSIC and MDL
4.2.1. The I-MUSIC Algorithm
4.2.2. Estimating the Number of Signals with MDL
4.3. Identification of the LoS
4.4. Target Localization
| Algorithm 2: AoA Estimation and localization. |
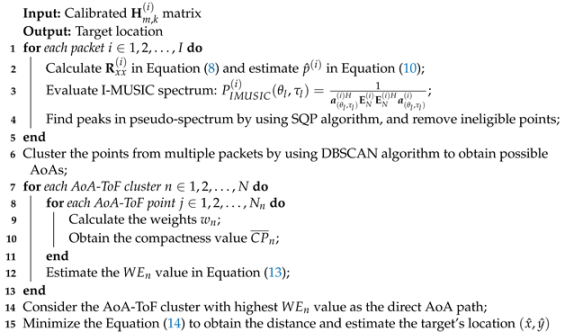 |
4.5. Multiple AP Localization
4.5.1. Conventional Trilateration with the Kalman Filter
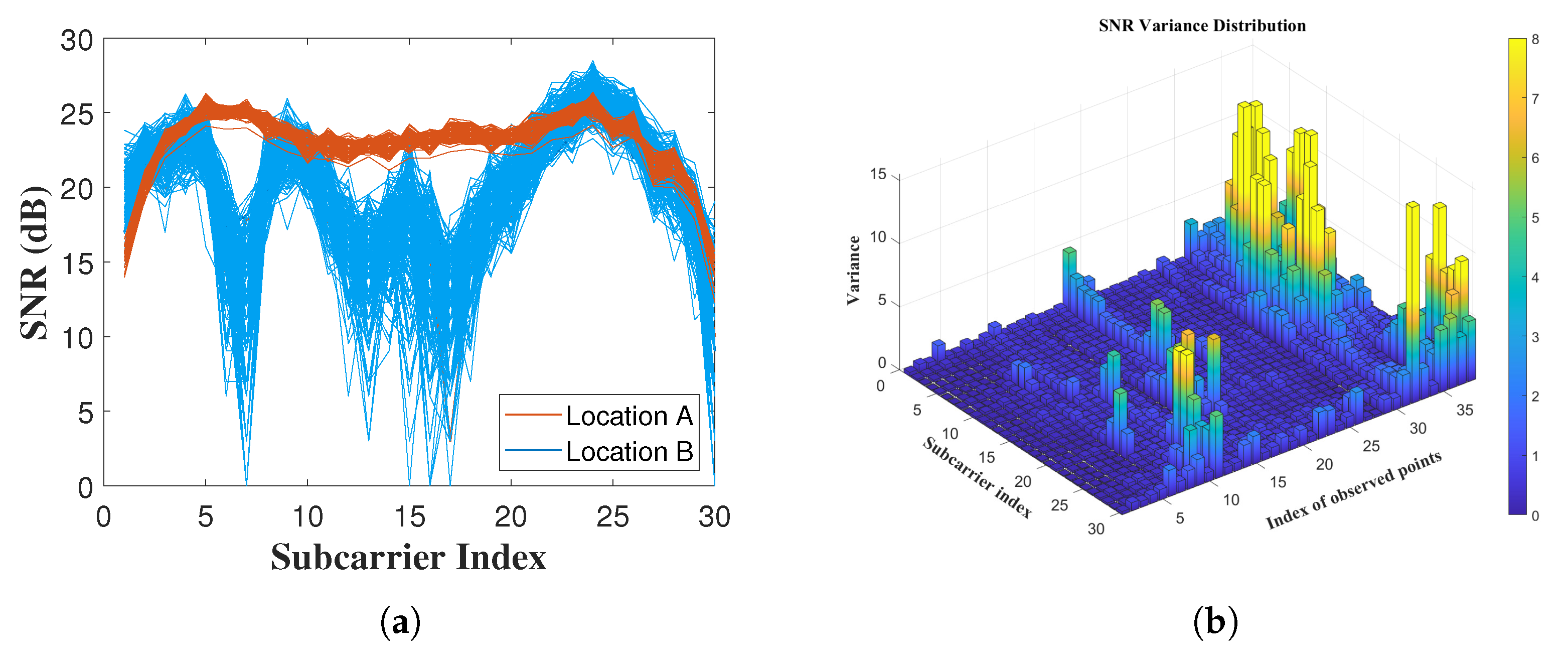
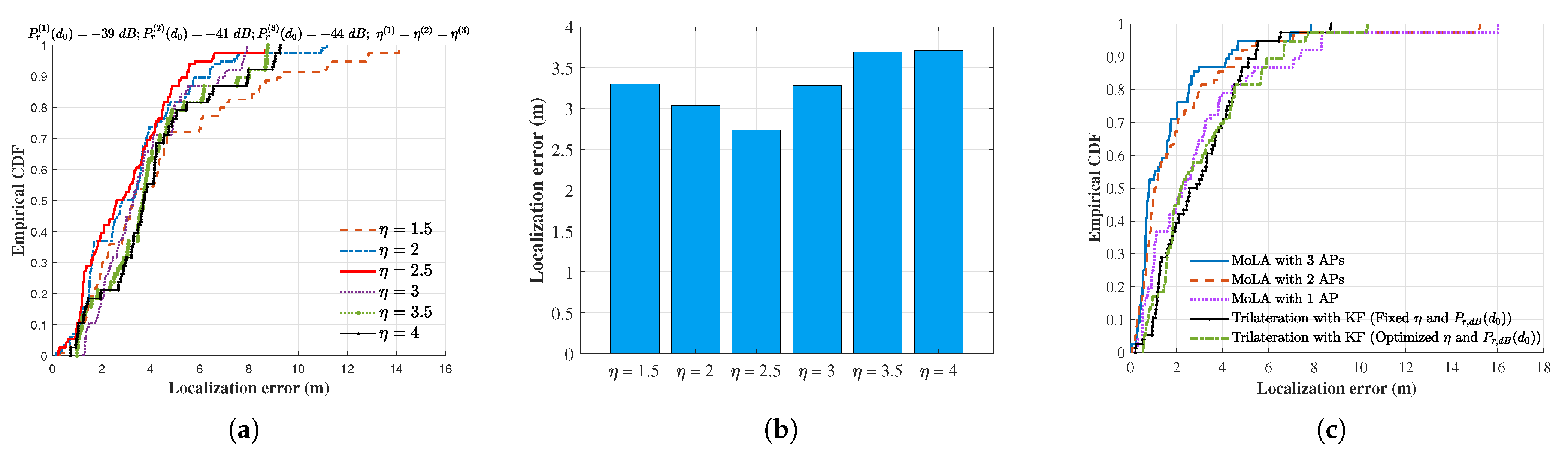
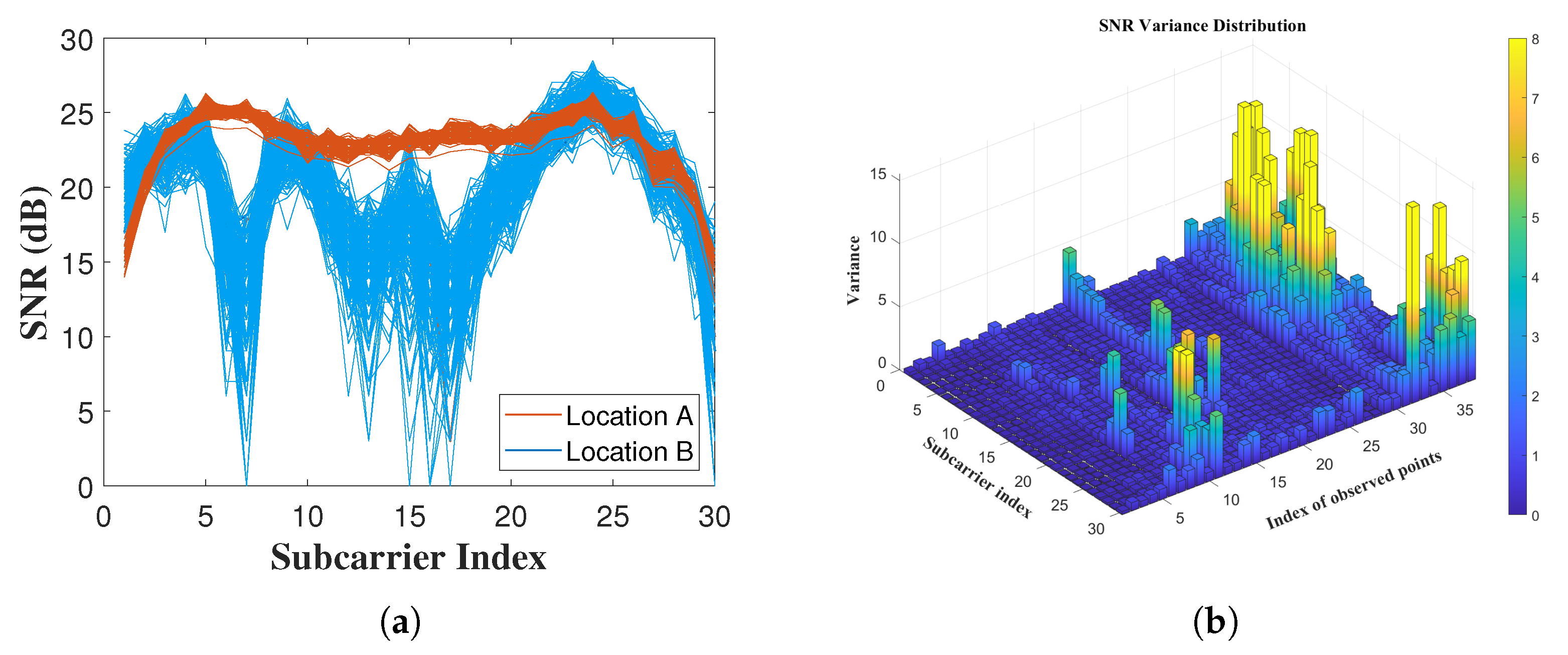
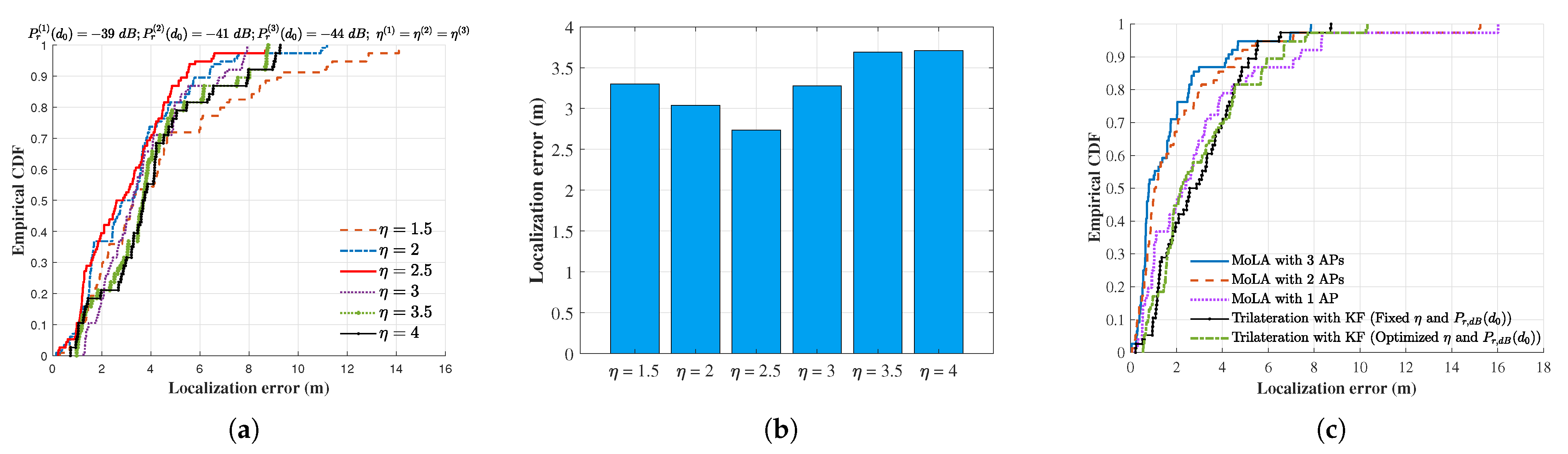
4.5.2. Characteristics of the RSSI among Different Locations
4.5.3. Weight Calculation and Multi-AP Localization
| Algorithm 3: Adaptive multi-AP localization. |
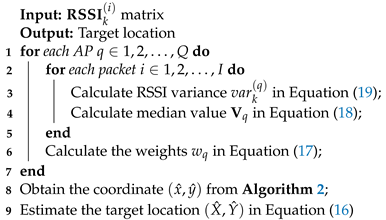 |
5. Experimental Evaluation
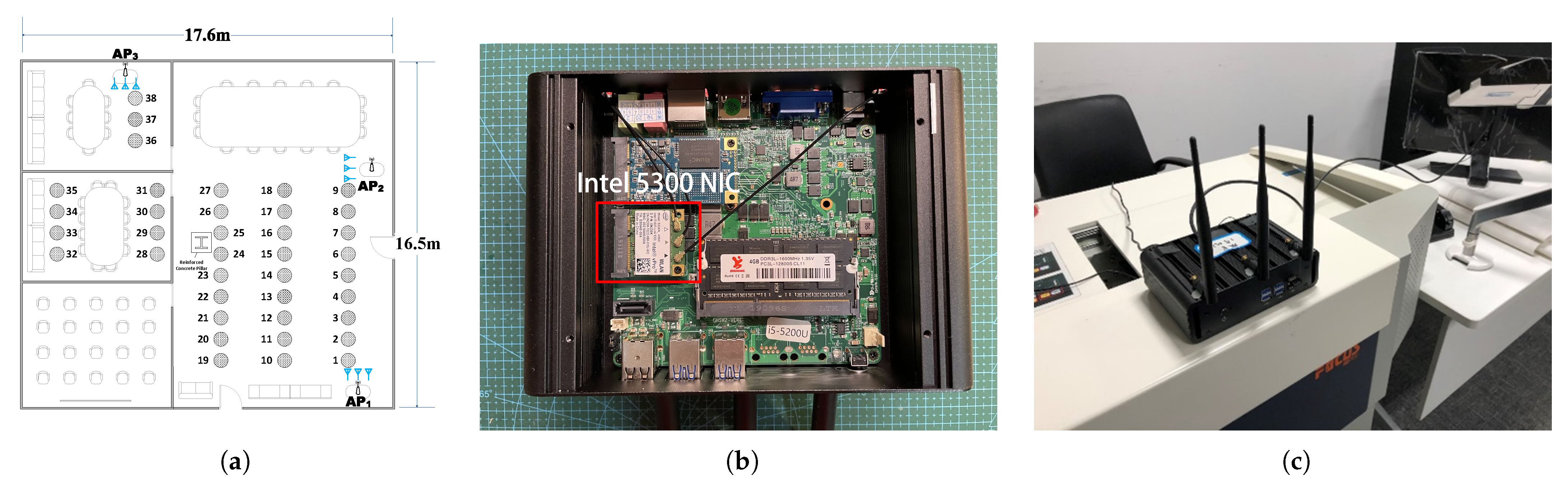
5.1. Implementation
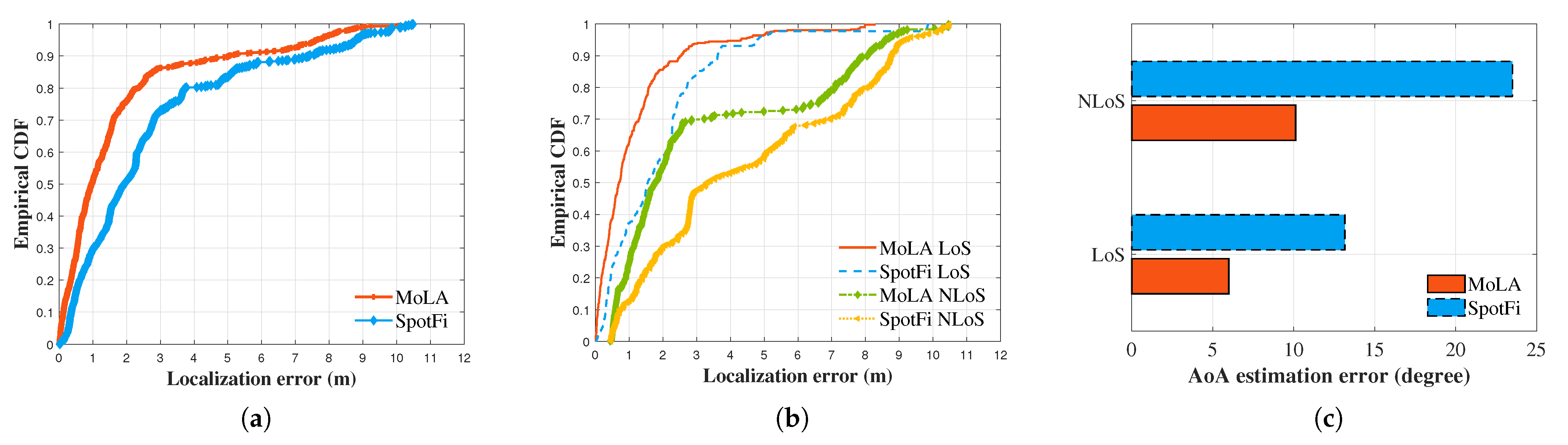
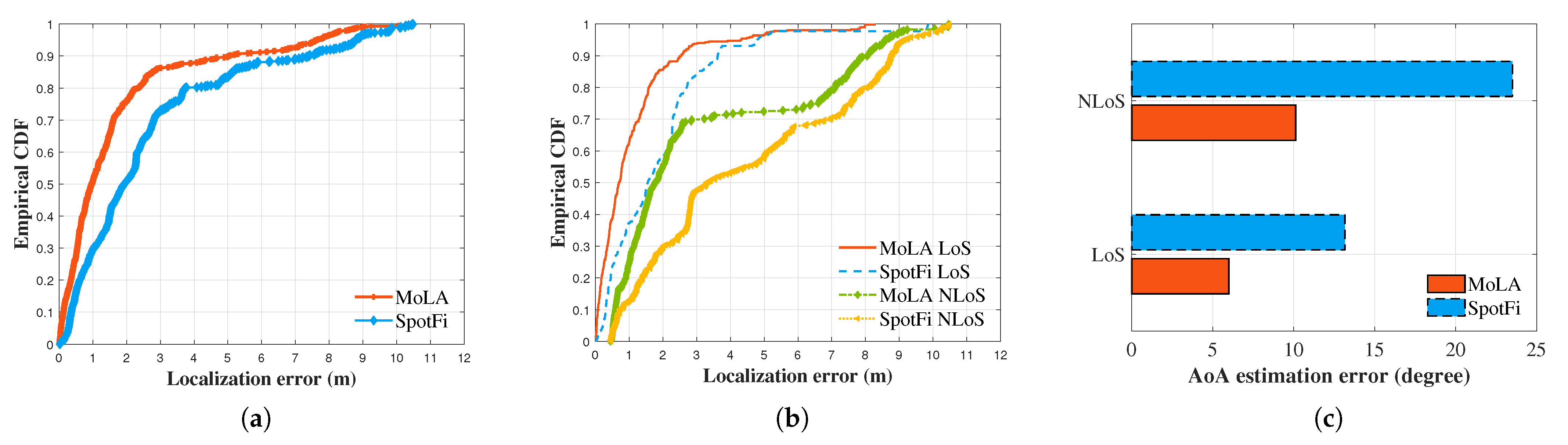
5.2. TP-Based Localization Accuracy
5.3. AoA Comparison
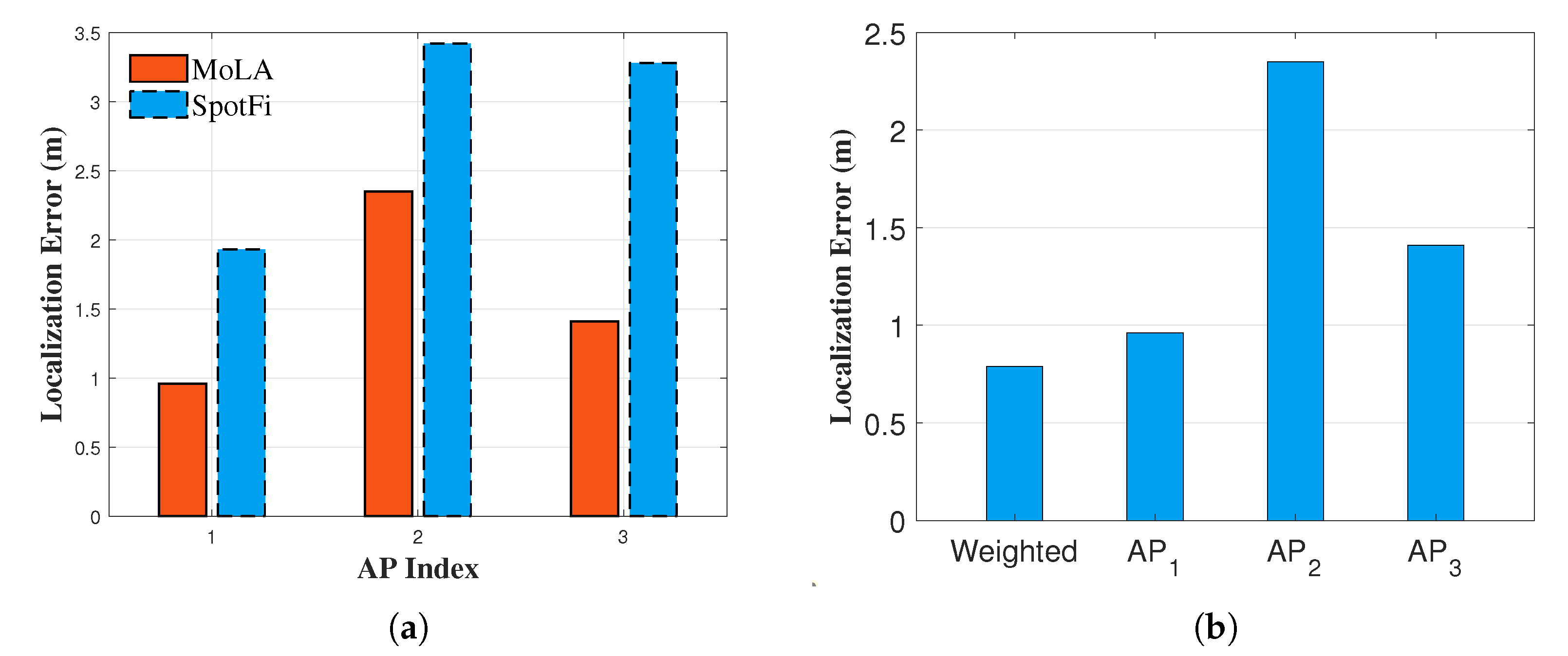
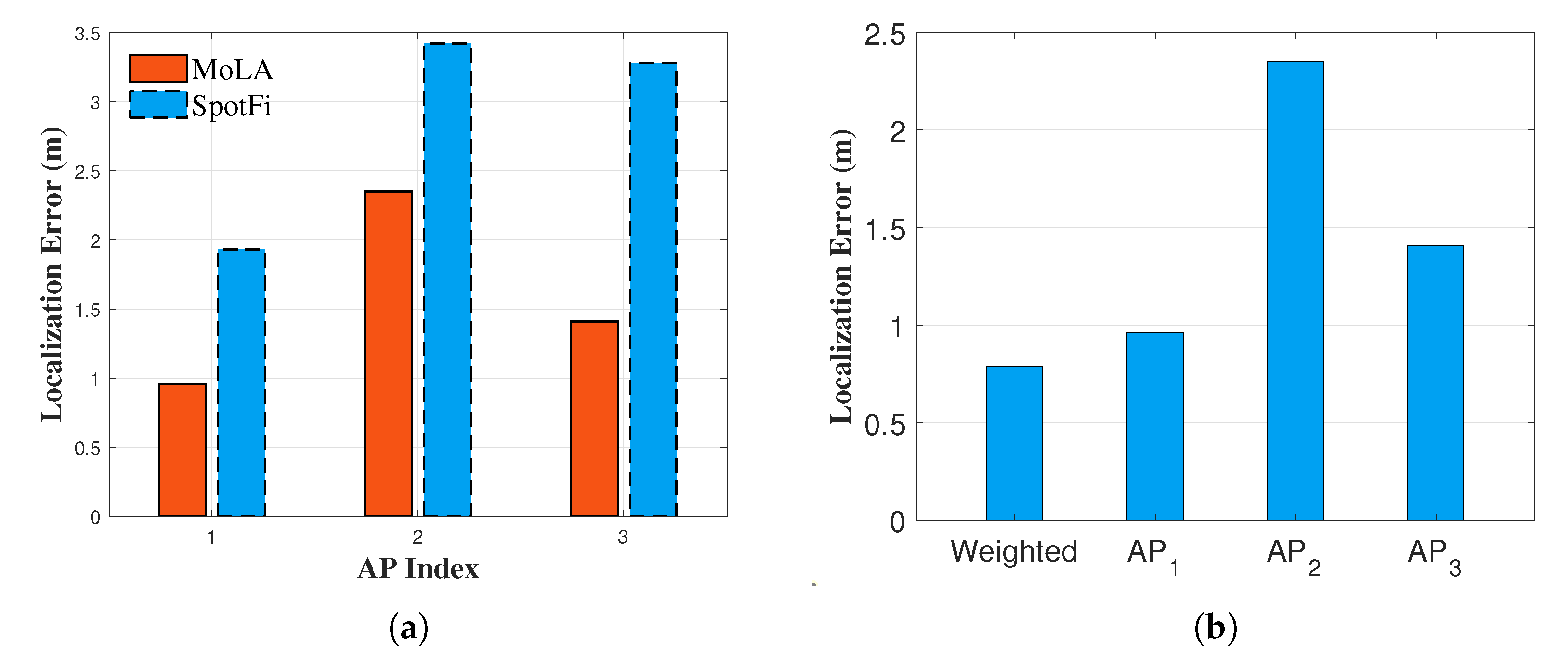
5.4. Multi-AP Localization Accuracy
6. Analysis of Influencing Factors
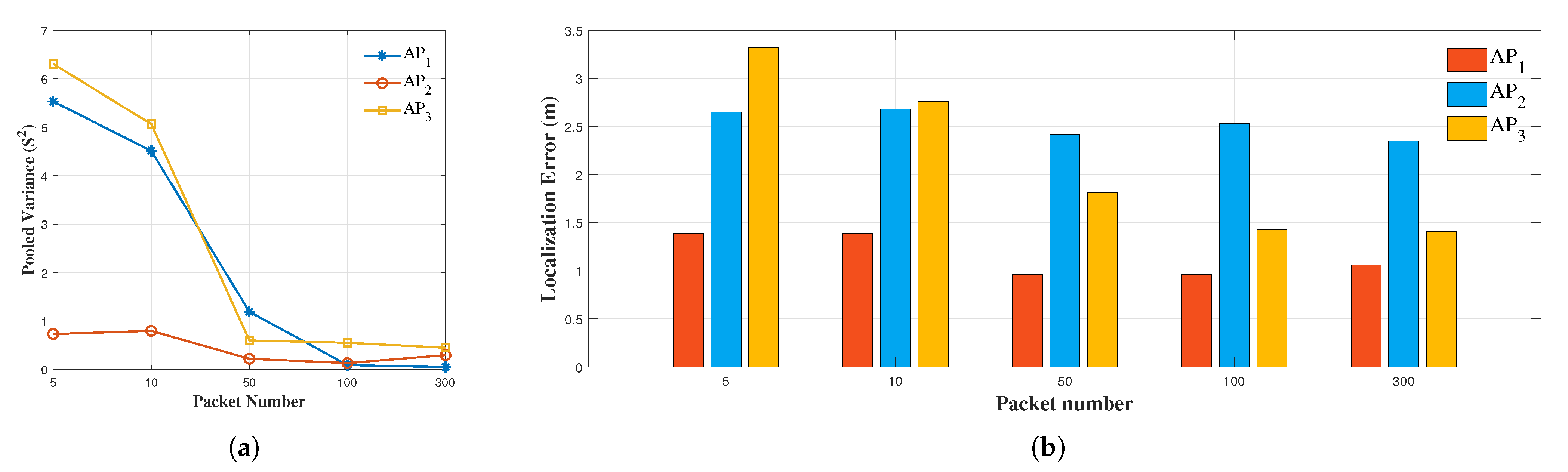
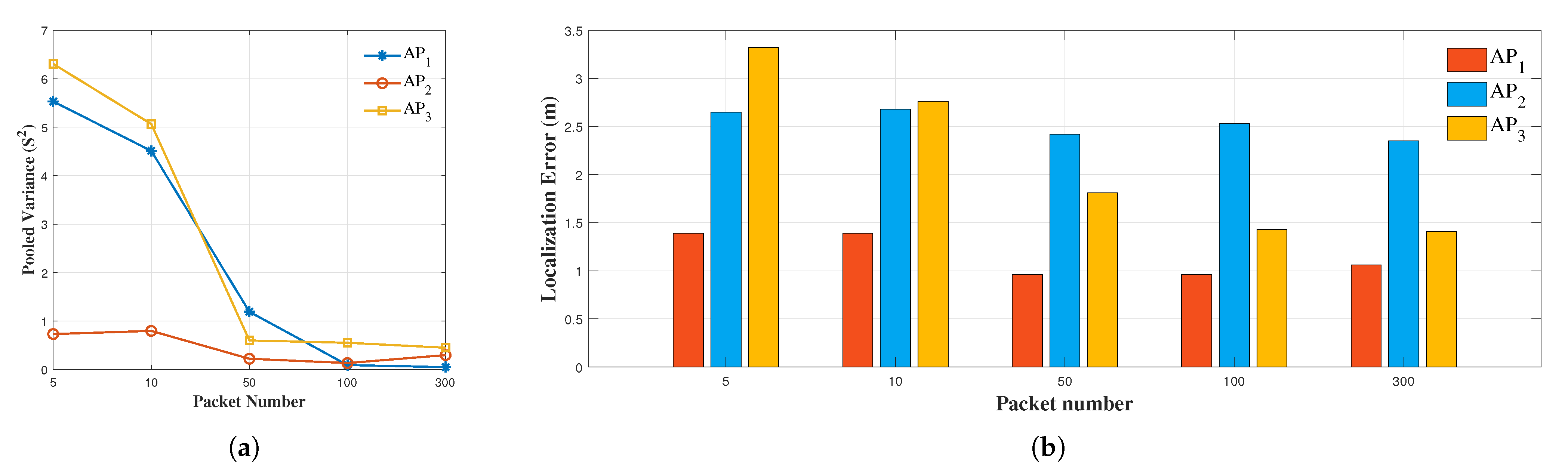
6.1. Impact of the Packet Number
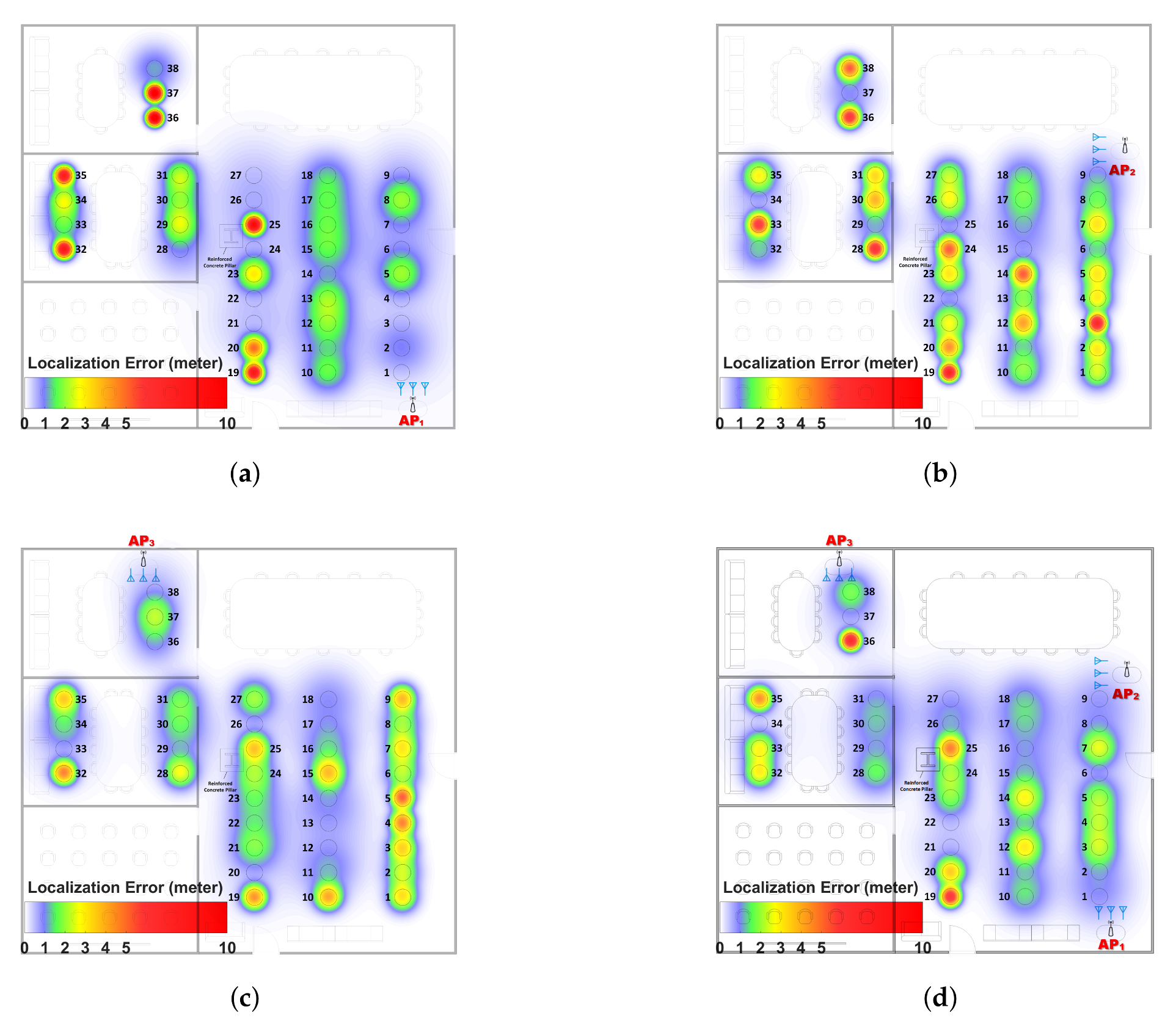
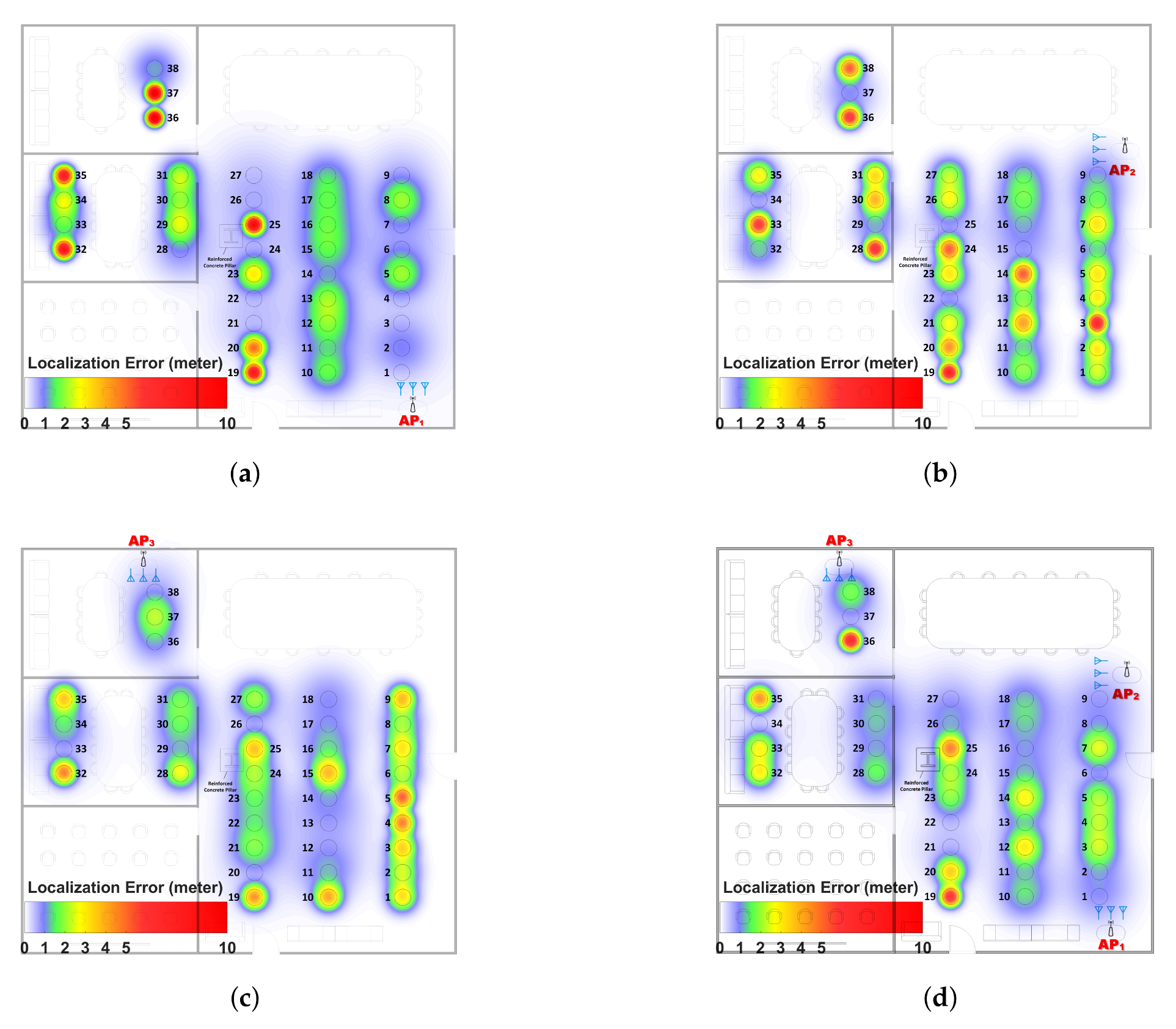
6.2. TP-Based Analysis
6.3. Impact of Antenna Array Orientation
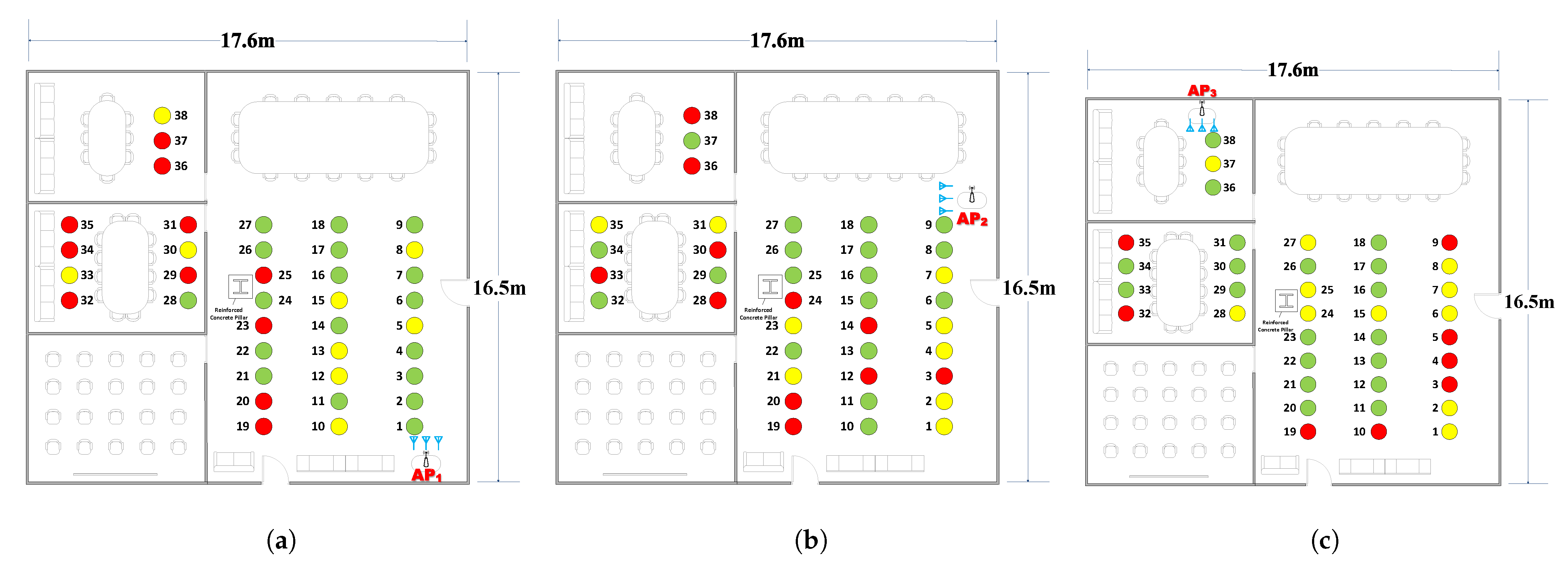
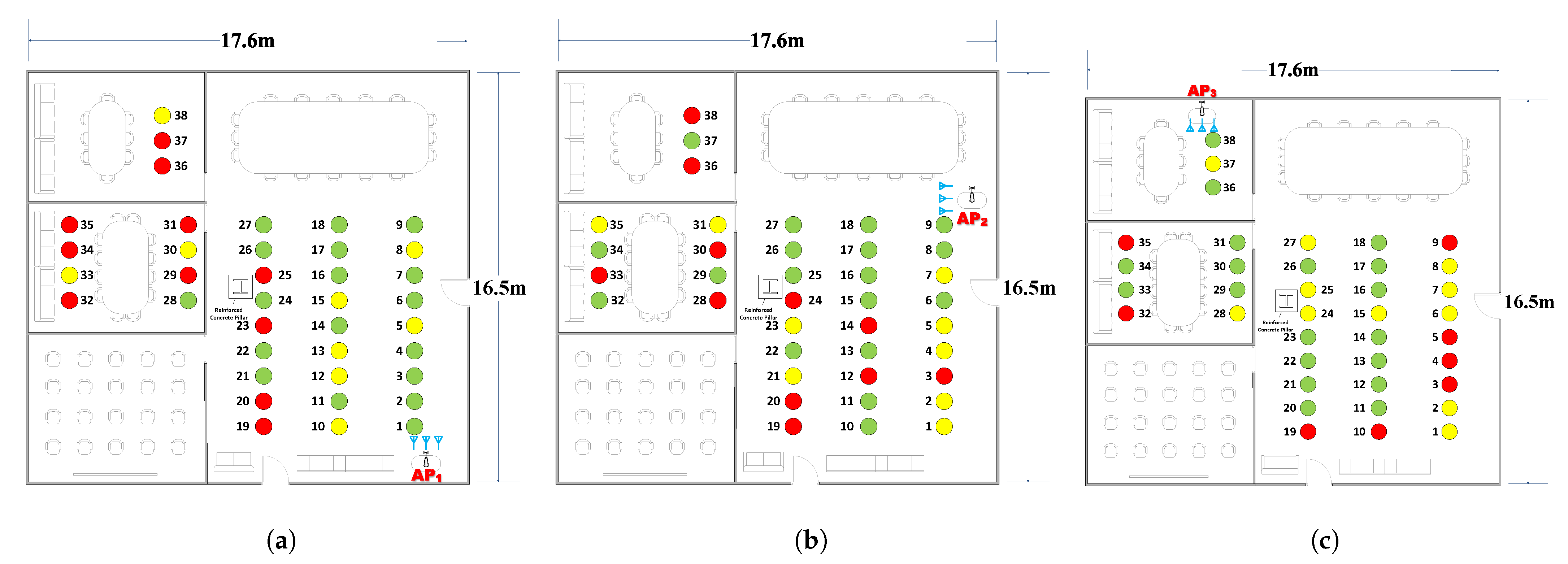
6.4. Impact of the AP’s Location
6.5. Other Considerations
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef] [Green Version]
- Pascacio, P.; Casteleyn, S.; Torres-Sospedra, J.; Lohan, E.S.; Nurmi, J. Collaborative Indoor Positioning Systems: A Systematic Review. Sensors 2021, 21, 1002. [Google Scholar] [CrossRef] [PubMed]
- Dow, J.; Neilan, R.; Gendt, G. The International GPS Service: Celebrating the 10th anniversary and looking to the next decade. Adv. Space Res. 2005, 36, 320–326. [Google Scholar] [CrossRef]
- Bentley, F.; Cramer, H.; Müller, J. Beyond the bar: The places where location-based services are used in the city. Pers. Ubiquitous Comput. 2015, 19, 217–223. [Google Scholar] [CrossRef]
- Renaudin, V.; Ortiz, M.; Perul, J.; Torres-Sospedra, J.; Jiménez, A.R.; Pérez-Navarro, A.; Mendoza-Silva, G.M.; Seco, F.; Landau, Y.; Marbel, R.; et al. Evaluating indoor positioning systems in a shopping mall: The lessons learned from the IPIN 2018 competition. IEEE Access 2019, 7, 148594–148628. [Google Scholar] [CrossRef]
- Elbes, M.; Alrawashdeh, T.; Almaita, E.; AlZu’bi, S.; Jararweh, Y. A platform for power management based on indoor localization in smart buildings using long short-term neural networks. Trans. Emerg. Telecommun. Technol. 2020, 33, e3867. [Google Scholar] [CrossRef]
- De Cillis, F.; Faramondi, L.; Inderst, F.; Marsella, S.; Marzoli, M.; Pascucci, F.; Setola, R. Hybrid indoor positioning system for first responders. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 468–479. [Google Scholar] [CrossRef]
- Stavropoulos, T.G.; Papastergiou, A.; Mpaltadoros, L.; Nikolopoulos, S.; Kompatsiaris, I. IoT wearable sensors and devices in elderly care: A literature review. Sensors 2020, 20, 2826. [Google Scholar] [CrossRef]
- Ramezani, R.; Zhang, W.; Xie, Z.; Shen, J.; Elashoff, D.; Roberts, P.; Stanton, A.; Eslami, M.; Wenger, N.; Sarrafzadeh, M.; et al. A combination of indoor localization and wearable sensor–based physical activity recognition to assess older patients undergoing subacute rehabilitation: Baseline study results. JMIR mHealth uHealth 2019, 7, e14090. [Google Scholar] [CrossRef]
- Munadhil, Z.; Gharghan, S.K.; Mutlag, A.H.; Al-Naji, A.; Chahl, J. Neural network-based Alzheimer’s patient localization for wireless sensor network in an indoor environment. IEEE Access 2020, 8, 150527–150538. [Google Scholar] [CrossRef]
- Basiri, A.; Lohan, E.S.; Moore, T.; Winstanley, A.; Peltola, P.; Hill, C.; Amirian, P.; e Silva, P.F. Indoor location based services challenges, requirements and usability of current solutions. Comput. Sci. Rev. 2017, 24, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Vasisht, D.; Kumar, S.; Katabi, D. Decimeter-Level Localization with a Single WiFi Access Point. In Proceedings of the 13th USENIX Symposium on Networked Systems Design and Implementation (NSDI), Santa Clara, CA, USA, 16–18 March 2016; pp. 165–178. [Google Scholar]
- Kotaru, M.; Joshi, K.; Bharadia, D.; Katti, S. SpotFi: Decimeter Level Localization Using WiFi. In Proceedings of the 2015 ACM Conference on Special Interest Group on Data Communication (SIGCOMM), London, UK, 17–21 August 2015; pp. 269–282. [Google Scholar]
- Gong, W.; Liu, J. RoArray: Towards More Robust Indoor Localization Using Sparse Recovery with Commodity WiFi. IEEE Trans. Mob. Comput. 2019, 18, 1380–1392. [Google Scholar] [CrossRef]
- Luo, J.; Fan, L.; Li, H. Indoor positioning systems based on visible light communication: State of the art. IEEE Commun. Surv. Tutor. 2017, 19, 2871–2893. [Google Scholar] [CrossRef]
- Wu, K.; Xiao, J.; Yi, Y.; Gao, M.; Ni, L.M. FILA: Fine-grained indoor localization. In Proceedings of the IEEE International Conference on Computer Communications (INFOCOM), Orlando, FL, USA, 25–30 March 2012; pp. 2210–2218. [Google Scholar]
- Liu, K.; Tian, Z.; Li, Z.; Wang, J.; Zhou, M. HiLoc: Sub-meter Level Indoor Localization Using a Single Access Point with Distributed Antennas in Wireless Sensor Networks. IEEE Sens. J. 2021, 22, 4869–4881. [Google Scholar] [CrossRef]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef]
- Rahman, A.B.M.M.; Li, T.; Wang, Y. Recent Advances in Indoor Localization via Visible Lights: A Survey. Sensors 2020, 20, 1382. [Google Scholar] [CrossRef] [Green Version]
- Nessa, A.; Adhikari, B.; Hussain, F.; Fernando, X.N. A survey of machine learning for indoor positioning. IEEE Access 2020, 8, 214945–214965. [Google Scholar] [CrossRef]
- Mautz, R. Indoor Positioning Technologies. Ph.D. Thesis, ETH, Zurich, Switzerland, 2012. [Google Scholar] [CrossRef]
- Halperin, D.; Hu, W.; Sheth, A.; Wetherall, D. Tool Release: Gathering 802.11n Traces with Channel State Information. SIGCOMM Comput. Commun. Rev. 2011, 41, 53. [Google Scholar] [CrossRef]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef] [Green Version]
- Kumar, S.; Gil, S.; Katabi, D.; Rus, D. Accurate Indoor Localization with Zero Start-up Cost. In Proceedings of the 20th Annual International Conference on Mobile Computing and Networking (MOBICOM), Maui, HI, USA, 7–11 September 2014; pp. 483–494. [Google Scholar]
- Xiong, J.; Jamieson, K. ArrayTrack: A Fine-Grained Indoor Location System. In Proceedings of the 10th USENIX Symposium on Networked Systems Design and Implementation (NSDI), Lombard, IL, USA, 2–5 April 2013; pp. 71–84. [Google Scholar]
- Gjengset, J.; Xiong, J.; McPhillips, G.; Jamieson, K. Phaser: Enabling Phased Array Signal Processing on Commodity WiFi Access Points. In Proceedings of the 20th Annual International Conference on Mobile Computing and Networking (MOBICOM), Maui, HI, USA, 7–11 September 2014; pp. 153–164. [Google Scholar]
- Xu, X.; Tang, Y.; Li, S. Indoor localization based on hybrid WiFi hotspots. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar]
- Li, X.; Li, S.; Zhang, D.; Xiong, J.; Wang, Y.; Mei, H. Dynamic-MUSIC: Accurate Device-Free Indoor Localization. In Proceedings of the ACM International Joint Conference on Pervasive and Ubiquitous Computing (UBICOMP), Heidelberg, Germany, 12–16 September 2016; pp. 196–207. [Google Scholar]
- Zayets, A.; Steinbach, E. Robust WiFi-based indoor localization using multipath component analysis. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Ohara, K.; Hayashi, T.; Maekawa, T.; Matsushita, Y. Metric structure from motion by indoor localization using WiFi channel state information. In Proceedings of the IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 6–9 August 2017; pp. 352–357. [Google Scholar] [CrossRef]
- Bnilam, N.; Tanghe, E.; Steckel, J.; Joseph, W.; Weyn, M. ANGLE: ANGular Location Estimation Algorithms. IEEE Access 2020, 8, 14620–14629. [Google Scholar] [CrossRef]
- SpotfiMusicAoaEstimation. Available online: https://bitbucket.org/mkotaru/spotfimusicaoaestimation/src/master/ (accessed on 1 January 2022).
- Li, S.; Welsen, S.; Brusic, V. Multi-Step Optimization of Indoor Localization Accuracy Using Commodity WiFi. In Proceedings of the IEEE 32nd Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Helsinki, Finland, 13–16 September 2021; pp. 1267–1272. [Google Scholar] [CrossRef]
- MoLAAlogorithm. Available online: https://github.com/SimonXMM/MoLA (accessed on 6 March 2022).
- Han, S.; Li, Y.; Meng, W.; Li, C.; Liu, T.; Zhang, Y. Indoor localization with a single WiFi access point based on OFDM-MIMO. IEEE Syst. J. 2018, 13, 964–972. [Google Scholar] [CrossRef]
- Wang, J.; Jiang, H.; Xiong, J.; Jamieson, K.; Chen, X.; Fang, D.; Xie, B. LiFS: Low Human-Effort, Device-Free Localization with Fine-Grained Subcarrier Information. In Proceedings of the 22nd Annual International Conference on Mobile Computing and Networking (MOBICOM), New York, NY, USA, 3–7 October 2016; pp. 243–256. [Google Scholar]
- Xiao, J.; Wu, K.; Yi, Y.; Ni, L.M. FIFS: Fine-grained indoor fingerprinting system. In Proceedings of the 21st International Conference on Computer Communications and Networks (ICCCN), Munich, Germany, 30 July–2 August 2012; pp. 1–7. [Google Scholar]
- Wang, X.; Gao, L.; Mao, S. PhaseFi: Phase fingerprinting for indoor localization with a deep learning approach. In Proceedings of the IEEE Global Communications Conference (GLOBECOM), San Diego, CA, USA, 6–10 December 2015; pp. 1–6. [Google Scholar]
- Wang, X.; Gao, L.; Mao, S.; Pandey, S. CSI-based fingerprinting for indoor localization: A deep learning approach. IEEE Trans. Veh. Technol. 2016, 66, 763–776. [Google Scholar] [CrossRef] [Green Version]
- Molodtsov, V.; Kureev, A.; Khorov, E. Experimental Study of Smoothing Modifications of the MUSIC Algorithm for Direction of Arrival Estimation in Indoor Environments. IEEE Access 2021, 9, 153767–153774. [Google Scholar] [CrossRef]
- Bakhar, M.; Vani, R.; Hunagund, P. Implementation and optimization of modified MUSIC algorithm for high resolution DOA estimation. In Proceedings of the IEEE International Microwave and RF Conference (IMaRC), Bangalore, India, 15–17 December 2014; pp. 190–193. [Google Scholar]
- Nocedal, J.; Wright, S. Numerical Optimization; Springer Science & Business Media LLC: New York, NY, USA, 2006; pp. 530–560. [Google Scholar]
- Wax, M.; Ziskind, I. Detection of the number of coherent signals by the MDL principle. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 1190–1196. [Google Scholar] [CrossRef]
- Tuncer, T.E.; Friedlander, B. Classical and Modern Direction-of-Arrival Estimation; Academic Press: Burlington, MA, USA, 2009; pp. 2–21. [Google Scholar]
- Zhuo, Y.; Zhu, H.; Xue, H. Identifying a new non-linear CSI phase measurement error with commodity WiFi devices. In Proceedings of the IEEE 22nd International Conference on Parallel and Distributed Systems (ICPADS), Wuhan, China, 13–16 December 2016; pp. 72–79. [Google Scholar]
- Liu, W.; Cheng, Q.; Deng, Z.; Chen, H.; Fu, X.; Zheng, X.; Zheng, S.; Chen, C.; Wang, S. Survey on CSI-based indoor positioning systems and recent advances. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; pp. 1–8. [Google Scholar]
- Xue, W.; Qiu, W.; Hua, X.; Yu, K. Improved WiFi RSSI measurement for indoor localization. IEEE Sens. J. 2017, 17, 2224–2230. [Google Scholar] [CrossRef]
- Gupta, S. Measurement Uncertainties: Physical Parameters and Calibration of Instruments; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012; pp. 119–123. [Google Scholar]
- Dolińska, I.; Jakubowski, M.; Masiukiewicz, A. Interference comparison in wi-fi 2.4 GHz and 5 GHz bands. In Proceedings of the International Conference on Information and Digital Technologies (IDT), Zilina, Slovakia, 5–7 July 2017; pp. 106–112. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location A | Location B | |
|---|---|---|
| RSSI (dB) | 23 | 19 |
| Variance | 0.1 | 2.1 |
| AP | AP | AP | |
|---|---|---|---|
| TR | 0.9 m | 2.3 m | 1.4 m |
| TR | 1.9 m | 3.4 m | 3.2 m |
| AP | AP | AP | AP | AP | AP | |
|---|---|---|---|---|---|---|
| (LoS) | (NLoS) | (LoS) | (NLoS) | (LoS) | (NLoS) | |
| BP | 4 | 7 | 6 | 5 | 0 | 8 |
| MA | 6 | 3 | 7 | 2 | 1 | 10 |
| HA | 17 | 1 | 14 | 4 | 2 | 17 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Welsen, S.; Brusic, V. Multi-AP and Test Point Accuracy of the Results in WiFi Indoor Localization. Sensors 2022, 22, 3709. https://doi.org/10.3390/s22103709
Li S, Welsen S, Brusic V. Multi-AP and Test Point Accuracy of the Results in WiFi Indoor Localization. Sensors. 2022; 22(10):3709. https://doi.org/10.3390/s22103709
Chicago/Turabian StyleLi, Shuyu, Sherif Welsen, and Vladimir Brusic. 2022. "Multi-AP and Test Point Accuracy of the Results in WiFi Indoor Localization" Sensors 22, no. 10: 3709. https://doi.org/10.3390/s22103709
APA StyleLi, S., Welsen, S., & Brusic, V. (2022). Multi-AP and Test Point Accuracy of the Results in WiFi Indoor Localization. Sensors, 22(10), 3709. https://doi.org/10.3390/s22103709