
A Partial Carrier Phase Integer Ambiguity Fixing Algorithm for Combinatorial Optimization between Network RTK Reference Stations

Abstract
:1. Introduction
2. Materials and Methods
2.1. GNSS Network RTK Data Solution Model
2.2. Solving for Ambiguity
2.3. Robust Extended Kalman Filter Algorithm
2.4. Improving the Partial Ambiguity Fixed Solution
- Firstly, we try to fix all ambiguities, i.e., without rejection filtering of the ambiguity set, the search of the floating-point ambiguity parameters obtained by Kalman filtering using LAMBDA algorithm directly, and the search results are tested jointly by R-ratio and bootstrapping success rate indicators, and if they pass the test, the fixation is considered successful; otherwise, we proceed to the next step.
- The ambiguity subsets are divided at the satellite level, and the total set of satellite azimuths (0°~360°) is divided into one subset as long as it is over 90°, and subsets are denoted as , , , and separately, and one satellite is removed from the divided subset to ensure that the GDOP value of the set is the smallest after removing a satellite. Then, the ambiguity of all remaining satellite sets is fixed.
- If the second step fails to be fixed, the set is then optimally filtered at the fuzzy degree level, and the three fuzzy degrees with larger ADOP values , , are selected from the subset. Then the GDOP1 value of the remaining satellite constellations can be calculated after eliminating the and ambiguities. The GDOP2 value of the remaining satellite constellations can be calculated after eliminating the and ambiguities, and the GDOP3 value of the remaining satellite constellations can be calculated after eliminating the and ambiguities. Comparing the size of the three GDOP values and eliminating the two ambiguities with large GDOP values from the set to obtain the optimal subset.
- The LAMBDA algorithm is employed to search the filtered optimal fuzzy degree subset and perform a joint R-ratio and bootstrapping success rate metric test, and if the fixation is successful, calculate the final fixed solution; if the fixation fails, the floating-point solution is saved.
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Teunissen, P.J.G. Success probability of integer GPS abiguity rounding and bootstrapping. J. Geod. 1998, 72, 606–612. [Google Scholar] [CrossRef] [Green Version]
- Jian-Jun, F.; Shao-Wei, Y.; Fei-Xue, W. Study on Multipath Mitigation and Dual-frequency Fast Ambiguity Estimation Based on Kalman Filter. J. Electron. Inf. Technol. 2008, 30, 1075–1079. [Google Scholar]
- Odijk, D.; Arora, B.S.; Teunissen, P.J. Predicting the Success Rate of Long-baseline GPS + Galileo (Partial) Ambiguity Resolution. J. Navig. 2014, 67, 385–401. [Google Scholar] [CrossRef] [Green Version]
- Tianming, M.A.; Wang, J.; Zhu, H. RTK real-time centimeter level positioning algorithm for long-distance network. Sci. Surv. Mapp. 2017, 42, 157–162. [Google Scholar]
- Li, L.; Xu, A.; Zhu, H.; Xu, Z.; Xu, X. Fast solution of integer ambiguity between RTK reference stations in long distance network. Sci. Surv. Mapp. 2014, 39, 22–25. [Google Scholar]
- Wang, G.A.O.; Chengfa, G.A.O.; Shuguo, P.A.N. Fast Ambiguity Resolution Between GPS/GLONASS/BDS Combined Long-range Base Stations Based on Partial-fixing Strategy. Geomat. Inf. Sci. Wuhan Univ. 2017, 42, 558–562. [Google Scholar]
- Maulai, S.S.A.; Khan, A.M. Empirical Analysis of Environmental Effects on Real Time Kinematics Differential GNSS Receiver[C]. In Proceedings of the International Conference on Aerospace Science & Engineering, Islamabad, Pakistan, 14–16 November 2017. [Google Scholar]
- Han, H.; Wang, J.; Wang, J.; Moraleda, A.H. Reliable partial ambiguity resolution for single-frequency GPS/BDS and INS integration. GPS Solut. 2016, 21, 251–264. [Google Scholar] [CrossRef]
- Hou, Y.; Verhagen, S.; Wu, J. A data driven partial ambiguity resolution: Two step success rate criterion, and its simulation demonstration. Adv. Space Res. 2016, 58, 2435–2452. [Google Scholar] [CrossRef]
- Wang, J.; Feng, Y. Reliability of partial ambiguity fixing with multiple GNSS constellations. J. Geod. 2013, 87, 1–14. [Google Scholar] [CrossRef]
- Jackson, J.; Davis, B.; Gebre-Egziabher, D. A performance assessment of low-cost RTK GNSS receivers. In Proceedings of the IEEE/ION Position, Location & Navigation Symposium, Monterey, CA, USA, 23–26 April 2018. [Google Scholar]
- Deng, C.; Tang, W.; Liu, J.; Shi, C. Reliable single-epoch ambiguity resolution for short baselines using combined GPS/BeiDou system. GPS Solut. 2014, 18, 375–386. [Google Scholar] [CrossRef]
- Wu, Z.; Bian, S.; Xiang, C.; Ji, B.; Jiang, D. Comparison of success rates of three GNSS ambiguity resolution methods. Mar. Surv. Mapp. 2014, 34, 25–28. [Google Scholar]
- Zhao, X.; Wang, X.; Pan, S.; Deng, J. Partial ambiguity fixation and performance analysis of lambda algorithm. Chin. J. Inert. Technol. 2010, 18, 665–669. [Google Scholar]
- Chang, X.W.; Yang, X.; Zhou, T. Mlambda: A modified LAMBDA method for integer least-squares estimation. J. Geod. 2005, 79, 552–565. [Google Scholar] [CrossRef] [Green Version]
- Wang, K.; Chen, P.; Teunissen, P.J. Single-Epoch, Single-Frequency Multi-GNSS L5 RTK under High-Elevation Masking. Sensors 2019, 19, 1066. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lu, L.; Liu, W.; Li, J. Influence of reduced correlation on search efficiency in ambiguity resolution. J. Surv. Mapp. 2015, 44, 481–487. [Google Scholar]
- Shouhua, W.A.N.G.; Mingchi, L.U.; Xiyan, S.U.N.; Yuanfa, J.I.; Dingmei, H.U. IBeacon/INS Data Fusion Location Algorithm Based on Un-scented Kalman Filter. J. Electron. Inf. Technol. 2019, 41, 2209–2216. [Google Scholar]
- Wang, S.; Li, Y.; Sun, X.; Ji, Y. Dual-antenna attitude determination algorithm based on low-cost receiver. J. Comput. Appl. 2019, 39, 2381–2385. [Google Scholar]
- Teunissen, P.J.G.; Joosten, P.; Tiberius, C.C.J.M. Geometry-free ambiguity successful rates in case of partial fixing. In Proceedings of the ION-NTM, San Diego, CA, USA, 27 January 1999. [Google Scholar]
- Li, Z. Research on GPS Precise Single Point Positioning Based on Adaptive Kalman Filter. Ph.D. Thesis, Southwest Jiaotong University, Chengdu, China, 2017. [Google Scholar]
- Gao, W.; Zhang, S.; Wang, F.; Wang, L. Robust adaptive Kalman filtering algorithm in GPS navigation. Sci. Surv. Mapp. 2005, 8, 98–100. [Google Scholar]
- Gao, X.; Dai, W.; Pan, L. Robust EKF algorithm and its application in GPS/BDS dynamic relative positioning. Geod. Geodyn. 2014, 34, 140–144. [Google Scholar]
- Brack, A. Partial ambiguity resolution for reliable GNSS positioning—A useful tool. In Proceedings of the 2016 IEEE Aerospace Conference, Big Sky, MT, USA, 5–12 May 2016. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Related Parameters | Numerical Value |
|---|---|
| Elevation Threshold | 20 |
| Consecutive epochs | 10 Epoch |
| Signal-to-noise ratio | 35 dBHz |
| GDOP | 2.0 |
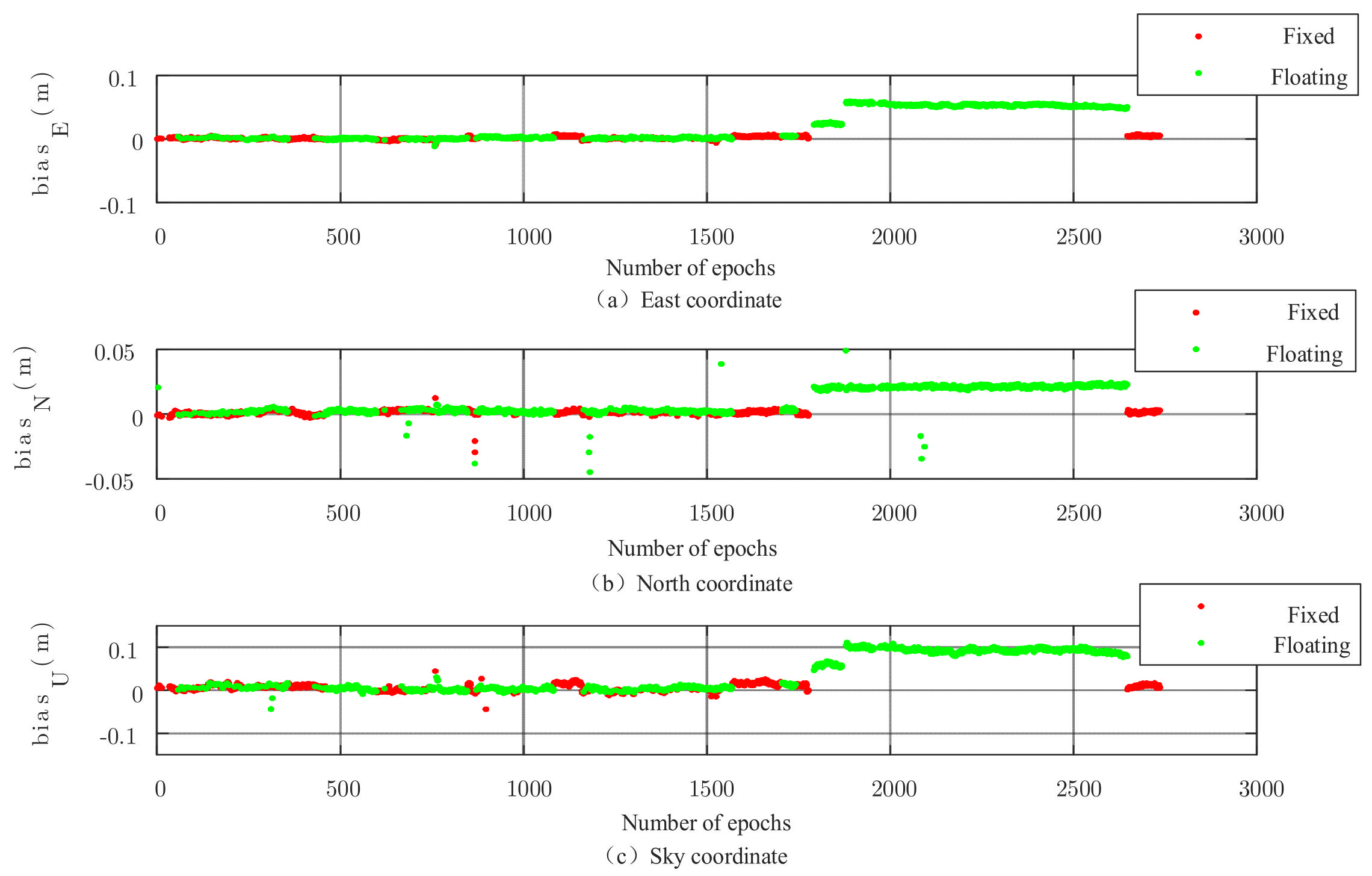
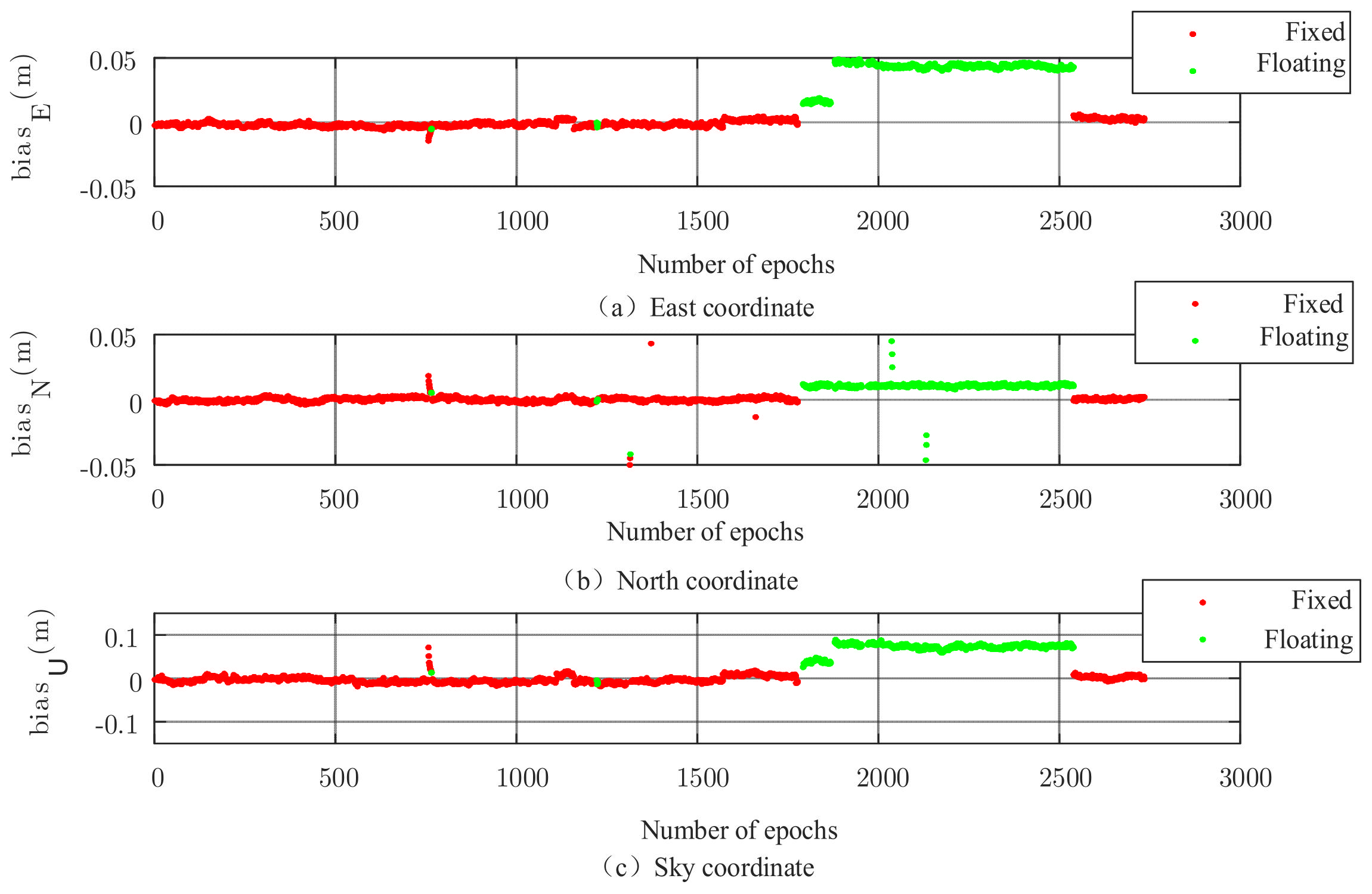
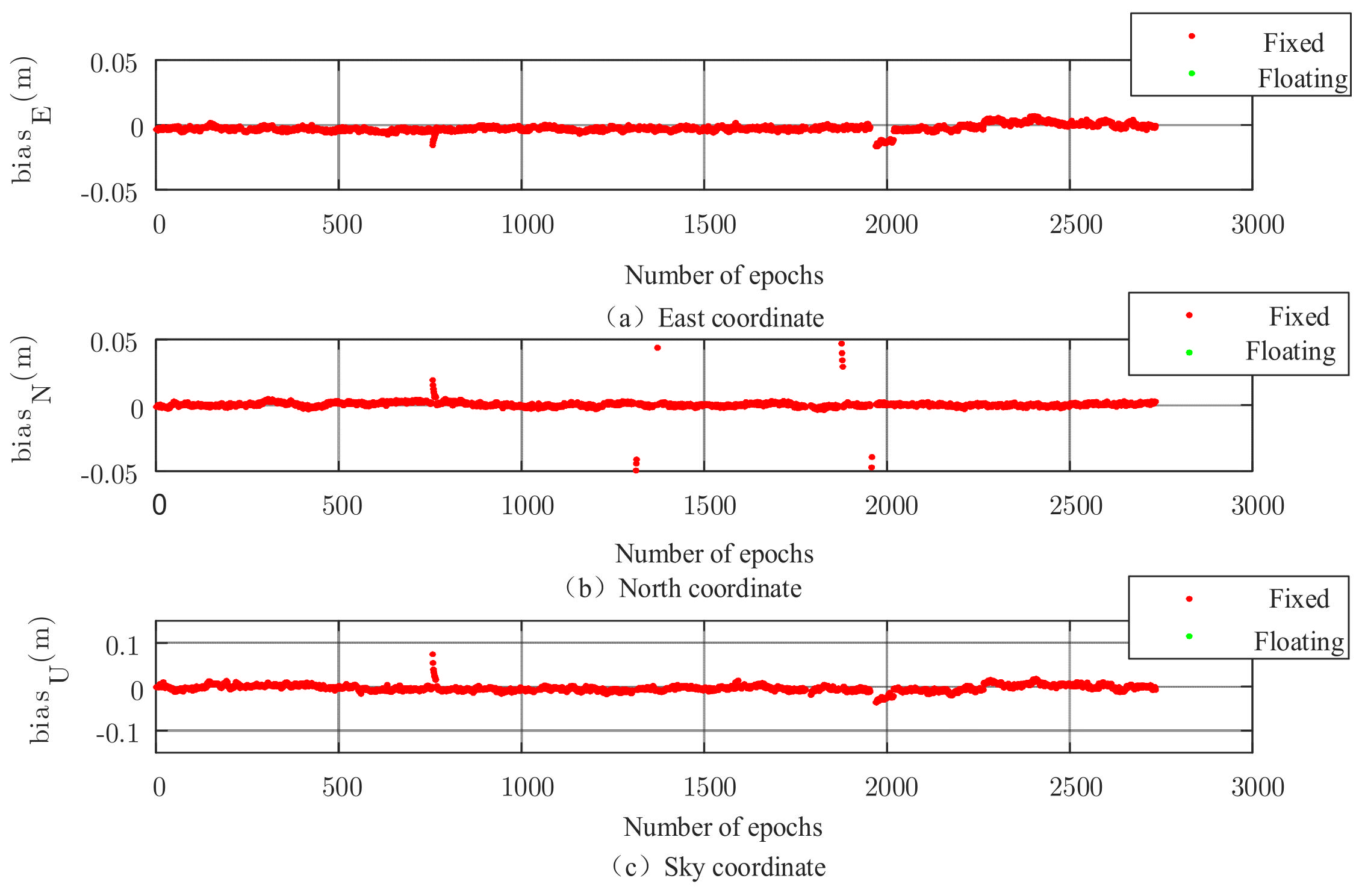
| Algorithm | FAR | PAR | N-PAR |
|---|---|---|---|
| successful epochs | 936 | 1983 | 273220 |
| failed epochs | 1799 | 751 | 310 Epoch |
| Fixed rate | 34.22% | 71.82% | 99.89 |
| Algorithm | ΔE | ΔN | ΔU |
|---|---|---|---|
| FAR | 0.0601 | 0.0259 | 0.0915 |
| PAR | 0.0459 | 0.0151 | 0.0493 |
| N-PAR | 0.0060 | 0.0089 | 0.0152 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; You, Z.; Sun, X. A Partial Carrier Phase Integer Ambiguity Fixing Algorithm for Combinatorial Optimization between Network RTK Reference Stations. Sensors 2022, 22, 165. https://doi.org/10.3390/s22010165
Wang S, You Z, Sun X. A Partial Carrier Phase Integer Ambiguity Fixing Algorithm for Combinatorial Optimization between Network RTK Reference Stations. Sensors. 2022; 22(1):165. https://doi.org/10.3390/s22010165
Chicago/Turabian StyleWang, Shouhua, Zhiqi You, and Xiyan Sun. 2022. "A Partial Carrier Phase Integer Ambiguity Fixing Algorithm for Combinatorial Optimization between Network RTK Reference Stations" Sensors 22, no. 1: 165. https://doi.org/10.3390/s22010165
APA StyleWang, S., You, Z., & Sun, X. (2022). A Partial Carrier Phase Integer Ambiguity Fixing Algorithm for Combinatorial Optimization between Network RTK Reference Stations. Sensors, 22(1), 165. https://doi.org/10.3390/s22010165