
An Uneven Node Self-Deployment Optimization Algorithm for Maximized Coverage and Energy Balance in Underwater Wireless Sensor Networks

Abstract
1. Introduction
- (1)
- A growth ring style-based scheme is proposed for constructing a connective tree structure. In this scheme, an incremental broadcast radius calculation is utilized to determine the GRs and construct the connective tree structure. It means that the radial distance between the GRs increases with its distance to sink node increasing. The nodes of UWSNs constructed by this deployment method are non-uniformly distributed ring by ring. That is, the network deployed by this strategy has the following characteristics: The number of nodes near sink node is large and the nodes distribution is dense, on the contrary, the number of nodes far from sink node is small and the nodes distribution is sparse. This conforms to the hot spot characteristics near the sink node. Thus, it has better network reliability, and its energy consumption is more balanced. It can avoid the energy hole [24,25] effectively.
- (2)
- A novel depth-adjustment self-deployment algorithm based on growth ring style is proposed. This algorithm strives to obtain the optimal network coverage rate on the basis of ensuring energy consumption balance and connectivity. Different from the recent approaches in the literature such as CDA [26,27], Cacc [28], VODA [29], and DODA [30], the proposed algorithm searches the global optimal dive position based on the basic nodes for depth calculation rather than the local optimal dive position. Furthermore, the proposed depth calculation method is with the goal of comprehensive optimization of both maximizing coverage utilization and energy balance, rather than just coverage only. Therefore, the coverage rate and energy balance of UWSN deployed by GRSUNDSOA is improved greatly.
2. Related Research
3. Preliminaries for GRSUNDSOA
3.1. Network Scenario
- (1)
- In the initial phase, sensors are dropped randomly to water surface of the monitoring area, the volume of which is denoted as Length × Width × Height (m3), so that a densely populated 2D connected network is formed. The number of sensors is denoted as N. All nodes are in sleep mode. For each node, its coordinate position on water surface can be calculated using location algorithm.
- (2)
- The energy of sink node is considered that can be replenished. And in this system, it is always located in the center of the monitoring area. There is only one sink node in this scenario.
- (3)
- Each node has a unique ID. Its communication radius is denoted as Rb which can be adjusted but must meet the condition Rb ≤ Rcmax, where Rcmax is denoted as the maximum communication radius. The sensing radius of each sensor is denoted as Rs.
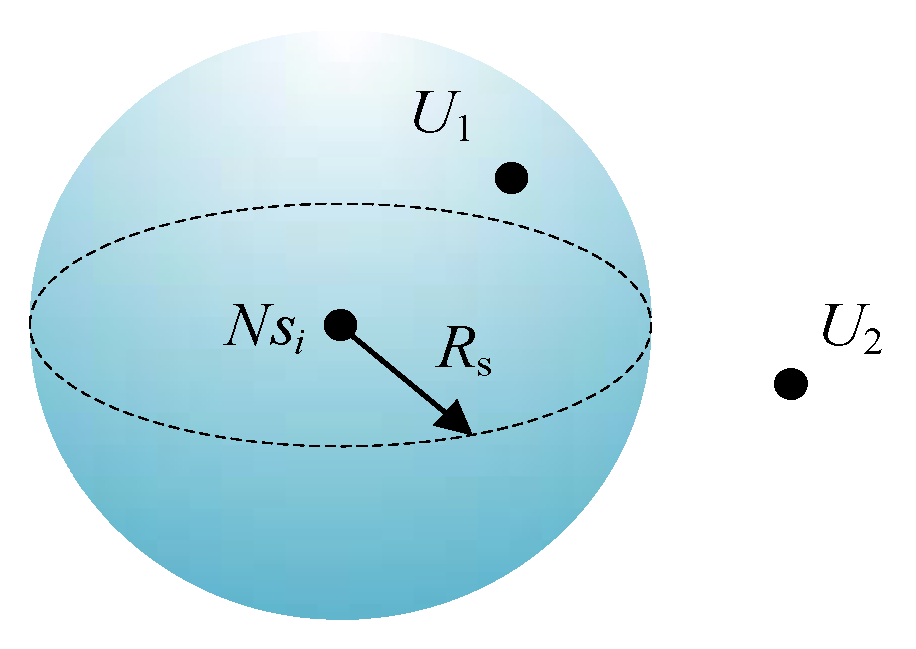
3.2. Coverage Model
3.3. Coverage Rate Calculation
3.4. Connectivity Definition
3.5. Coverage Utilization
3.6. Growth Ring and Forward Subtree Root Nodes
3.7. Basic Node Set
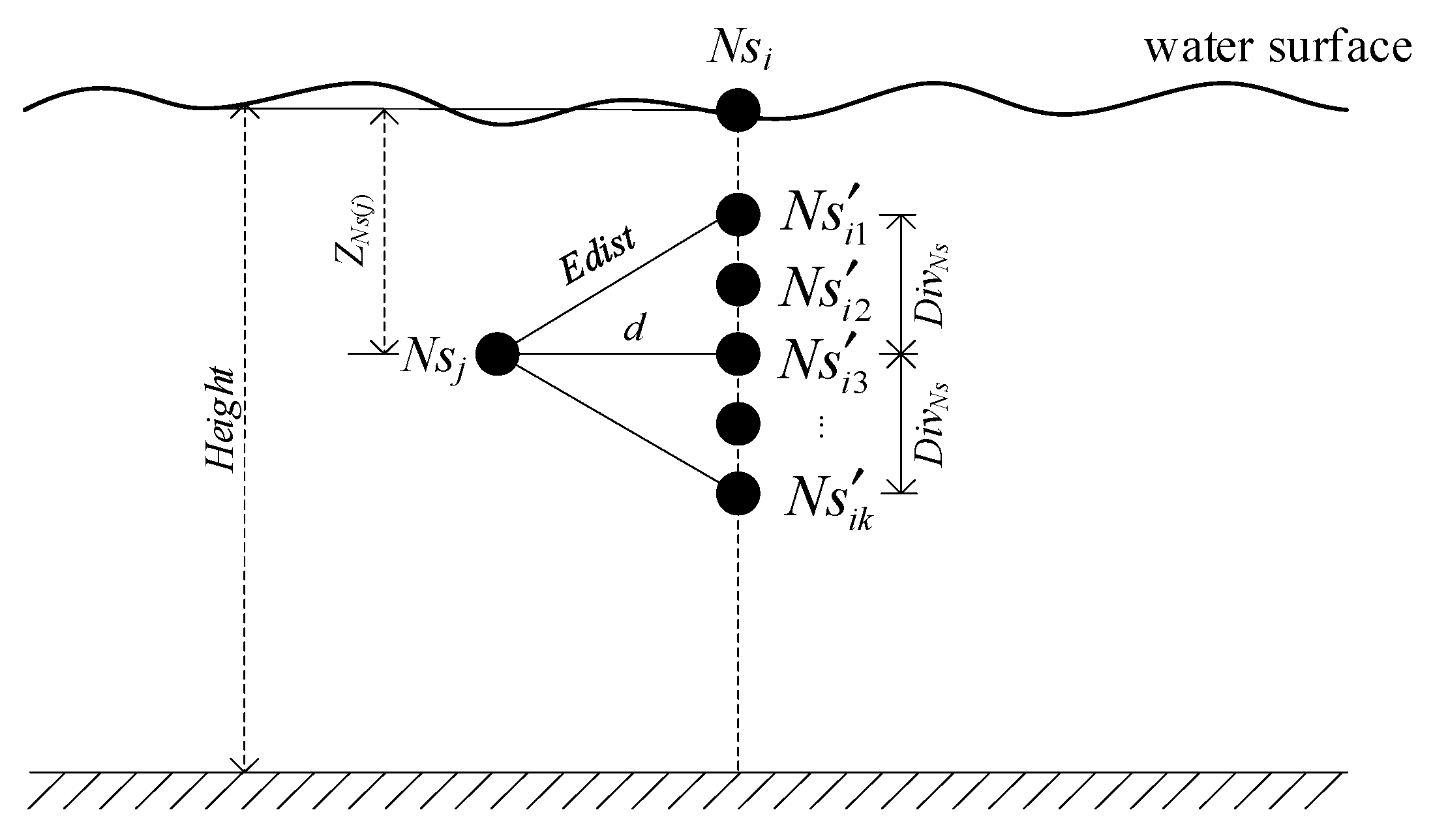
3.8. Horizontal Distance, Expect Distance and Offset Distance
3.9. Network Reliability Definition
3.10. Deployment Energy Consumption
3.11. Problem Definition
4. Description of the Proposed Algorithm
4.1. The Whole Strategy for the Proposed Algorithm
- (1)
- The 1st GR is determined. The 1st ring of connected tree is constructed rooted with sink node and the depths of the nodes within the 1st GR are computed.
- (2)
- Ring by ring, each ring of connected tree is constructed rooted with the previous GR and the depths of all nodes are calculated.
- (3)
- Sink node distributes the depths to the nodes so that all the nodes dive to the new position once.
4.2. Initialization
4.3. Searching for the FSRN Based on Growth Ring Style
| Algorithm 1 The algorithm for searching the FSRN based on growth ring style. |
| Step 1. The sink node broadcasts a message including < id = 0, g = 0 > to the other nodes with the broadcasting radius Rb, which is calculated by Equation (13): |
| where, α, β are parameters. The broadcast radius increases with the growth ring number g increasing, which makes the radial distance between GRs increasing gradually. |
| Each node Nsi that receives the broadcast message responses to the sink node with a message including < id = i, dist(Nsi,Sink) >. Then, the sink node sets Nsi.tree = 1, Nsi.root = 0, that is, Nsi is regarded as the subtree node of the sink node. |
| Step 2. According to the order of nodes in distnodes, each node Nsi that Nsi.tree = 1and Nsi. processed = 0 is processed and the SRNs set Rootg is constructed as follows. |
| If Rootg = Φ: A random number is generated as r = rand(). If r > th, where th is a threshold, the farthest node Nsi in distnodes that Nsi.tree = 1 and Nsi. processed = 0 is immediately added into Rootg. Then let Nsi.father be set with the id of the root of the subtree to which it belongs. Let Nsi. leaf = 0, that is, the node Nsi is a non-leaf node; otherwise, the next far node in distnodes that meets the candidate conditions continues to be considered. |
| If Rootg ≠ Φ: The node Nsi is determined whether to join in the subtree according to the following method. Let Nsj be an arbitrary node in Rootg. If both Nsi and Nsj satisfy the condition of Equation (14): |
| where, α, γ are parameters and the value of α is same with that of Equation (13), Nsi will be added into the Rootg. |
| The distribution of these nodes in Rootg acquired with this method is roughly uniform. Furthermore, this method can reduce the coverage overlap between subtree nodes and it is also good for improving the node utilization ratio. |
| Step 3. The depths of each SRN and its children are calculated and a connected tree is constructed with the method mentioned in Section 4.4. Then, these children nodes send their collected message to their corresponding parents, i.e., the FSRNs. The parent nodes aggregate these messages from the children in the subtree and forward the messages to FSRNs. The above procedure is performed repeatedly until sink node receives those collected messages. |
| Step 4. Each node in Rootg is denoted as FSRNs for the next GR. g ← g + 1. Then, these FSRNs broadcast messages including < id = i, g > to the next-hop nodes synchronously with the broadcasting radius Rb, which is calculated as Equation (13). Each node Nsi that receives the broadcast message and Nsi.tree = 0 responses to the nearest FSRN node Nsj with a message including < id = i >. Then, set Nsi.tree = 1 and Nsi.root = Nsj.id. |
| Step 5. Go to step 2 and execute step2–4 repeatedly until g > δ or all nodes are added to the tree structures, where δ is the maximum of GR and it can be calculated as Equation (15): |
4.4. Depth Computation for the Nodes Which Are Added in the Tree Structure
4.4.1. Depth Computation for the Common Child Nodes of Sink Node
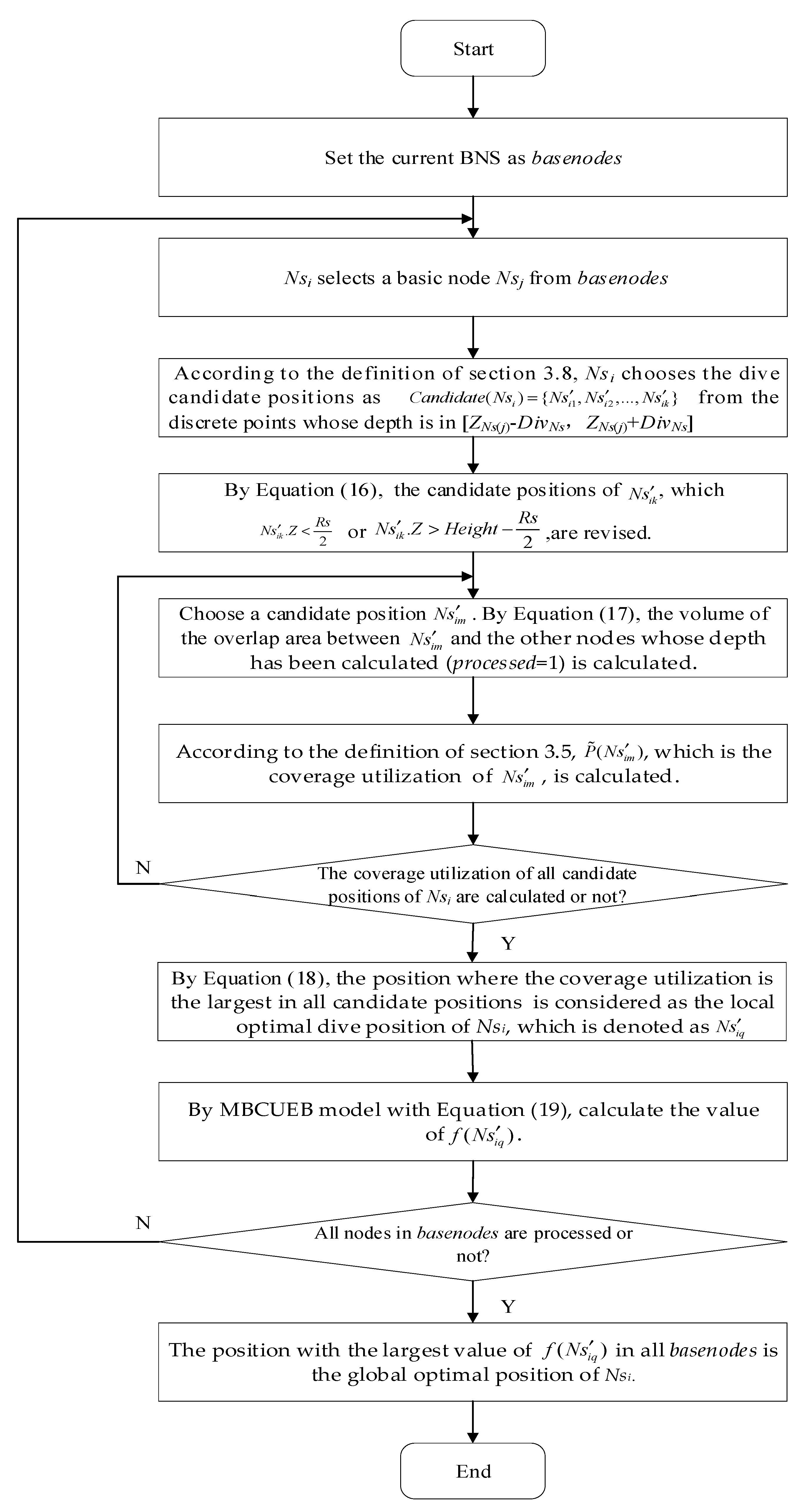
Calculation of local optimal dive depth based on basic node
The Model Based on Coverage Utilization and Energy Balance
The Global Optimization Frame for Depth-Adjustment
Description of the Algorithm
| Algorithm 2 Depth computation for the common child nodes of sink node |
| Step 1. Let basenodes be the BNS. Initially, set basenodes = {Sink}. |
| Step 2. For each common node Nsi, the method mentioned in Section “Calculation of local optimal dive depth based on basic node” above is adopted to select the basic node Nsj and calculate the local optimal dive depth based on this basic node Nsj. |
| Step 3. Taking each node in basenodes as the basic node, calculate the corresponding local optimal dive depth. Then the method mentioned in Section “The model based on coverage utilization and energy balance” and Section “The global optimization frame for depth-adjustment” above is adopted to calculate global optimal dive depth of Nsi. The current basic node corresponding to the global optimal depth is the parent node of Nsi. Set Nsi.father with the id of the basic node, Nsi.processed = 1. Add Nsi to basenodes. |
| Step 4. Go to step 2 and execute step2–3 repeatedly until the depths of all common children of sink node are calculated. |
4.4.2. Depth Computation for the SRN Nodes
4.4.3. Depth Computation for the Common Child Nodes of the SRN Nodes
4.5. Depth Computation for the Nodes out of the Subtree
| Algorithm 3 Depth computation for the nodes out of the subtree |
| Step 1. Select a node Nsj from the nodes whose depth has been calculated under the condition that d(Nsi,Nsj) < Rcmax, where d(Nsi,Nsj) is the HD between Nsi and Nsj. Then, Nsj is considered as the neighbor node of Nsi on the horizontal plane. |
| Step 2. Nsi is added to the tree structure rooted with Nsj. If d(Nsi, Nsj) ≥ α* Rs, the depth of Nsi is set the same with that of Nsj. Otherwise, the local optimal dive depth of Nsi is calculated using Equations (16)–(18) considering Nsj as the basic node. |
| When selecting the node Nsj, its degree (i.e., the number of its children) should be inspected. If the degree of Nsj is greater than μ, where μ is a non-negative integer threshold, it means that Nsj is overloaded for network transmission. In order to balance the energy consumption, another node is selected from the nodes whose dive depth has been calculated. |
| Step 3. The above process is performed repeatedly until all nodes are added in the tree structures and their depths are calculated. |
4.6. Adjusting the Node Depth
4.7. Algorithm Flow
5. Algorithm Simulation and Analysis
5.1. Theory Analysis
5.1.1. Feasibility Analysis
5.1.2. Connectivity Analysis
5.1.3. Energy Balance Analysis
5.1.4. Complexity Analysis
Message Complexity
Time Complexity
5.2. Simulation and Experimental Analysis
5.2.1. Simulation Scenario and Parameter Settings
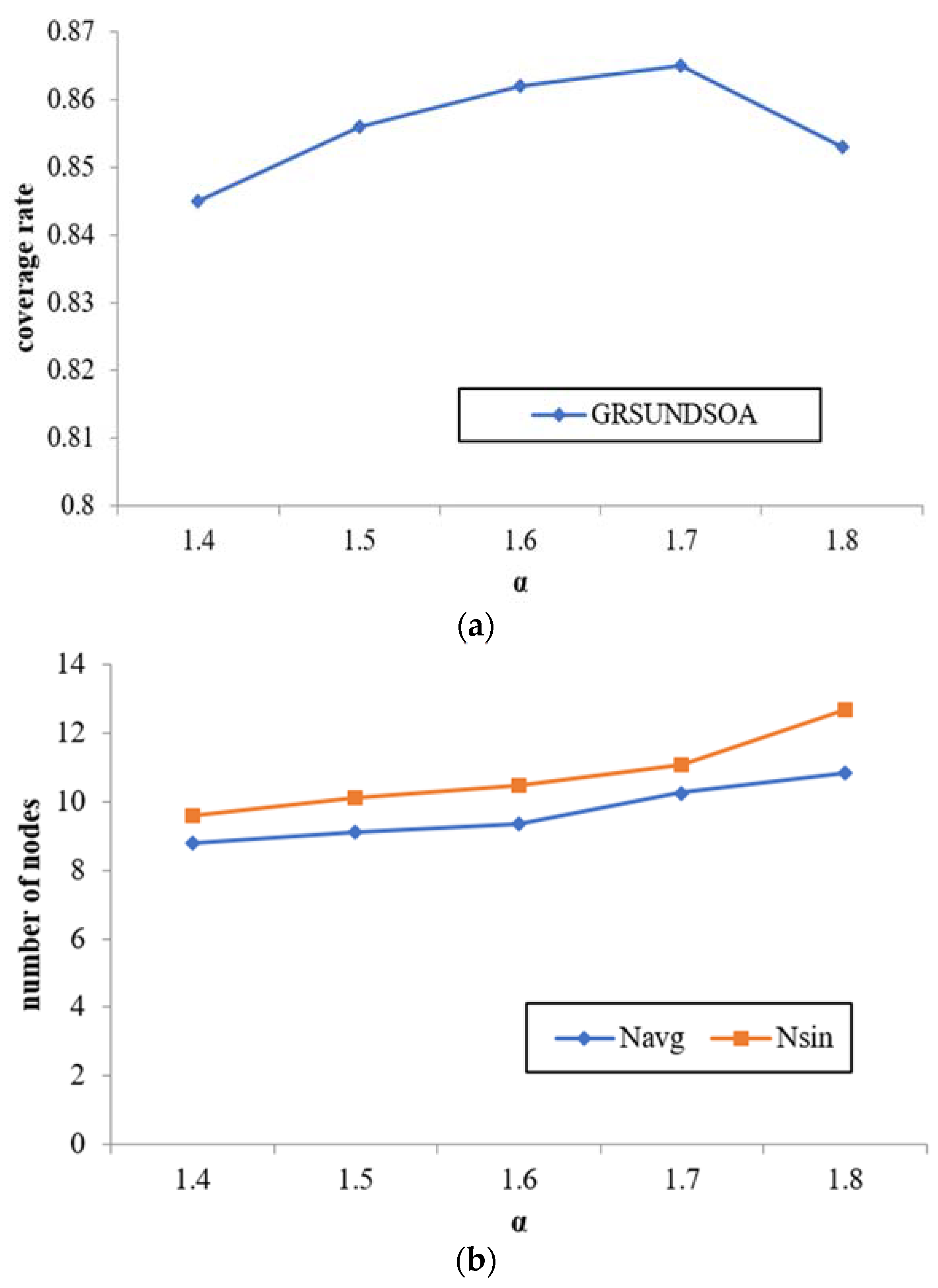
5.2.2. Analysis of the Effect of Parameter α on the Algorithm
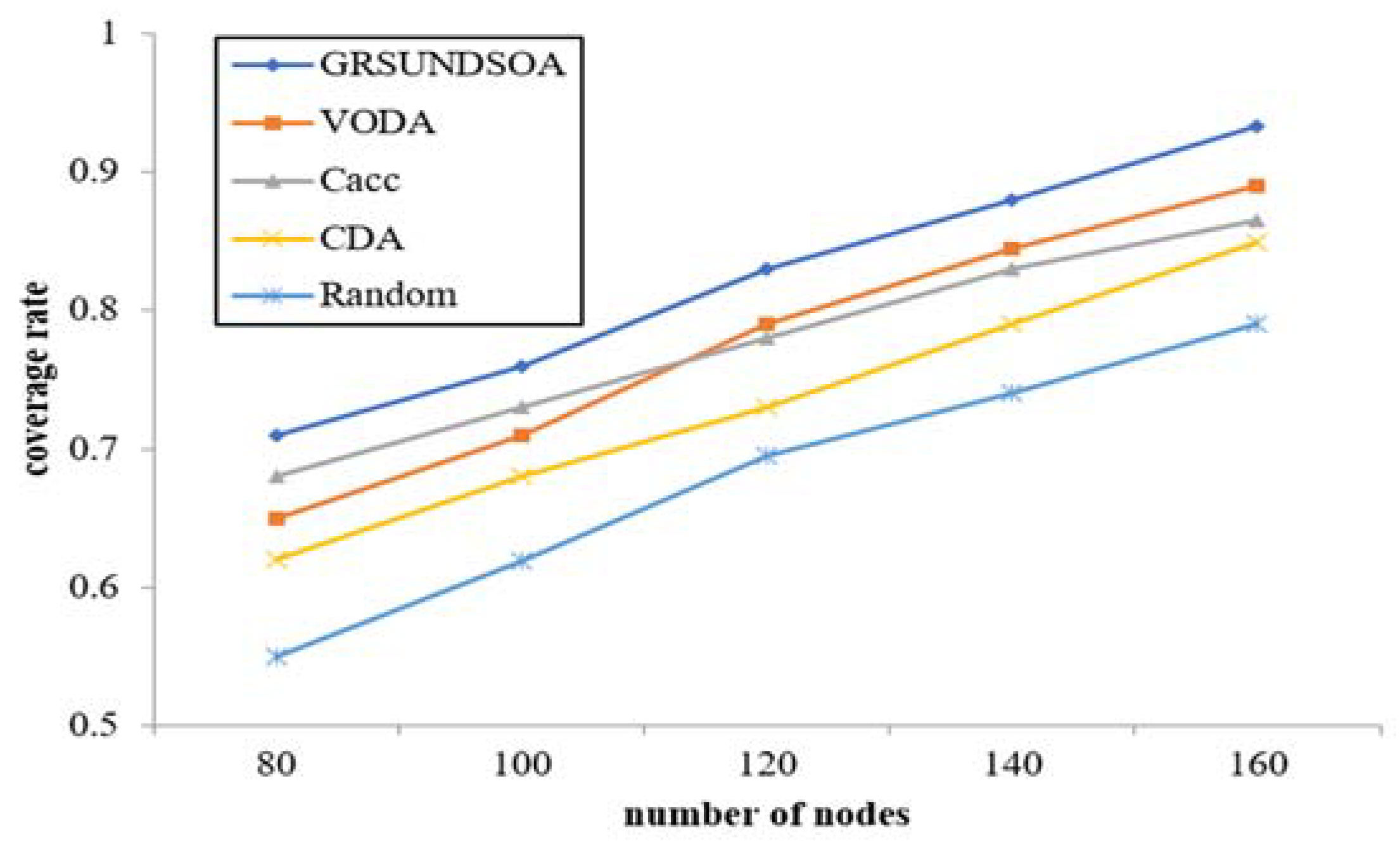
5.2.3. Coverage Rate Comparison
5.2.4. Connectivity Comparison
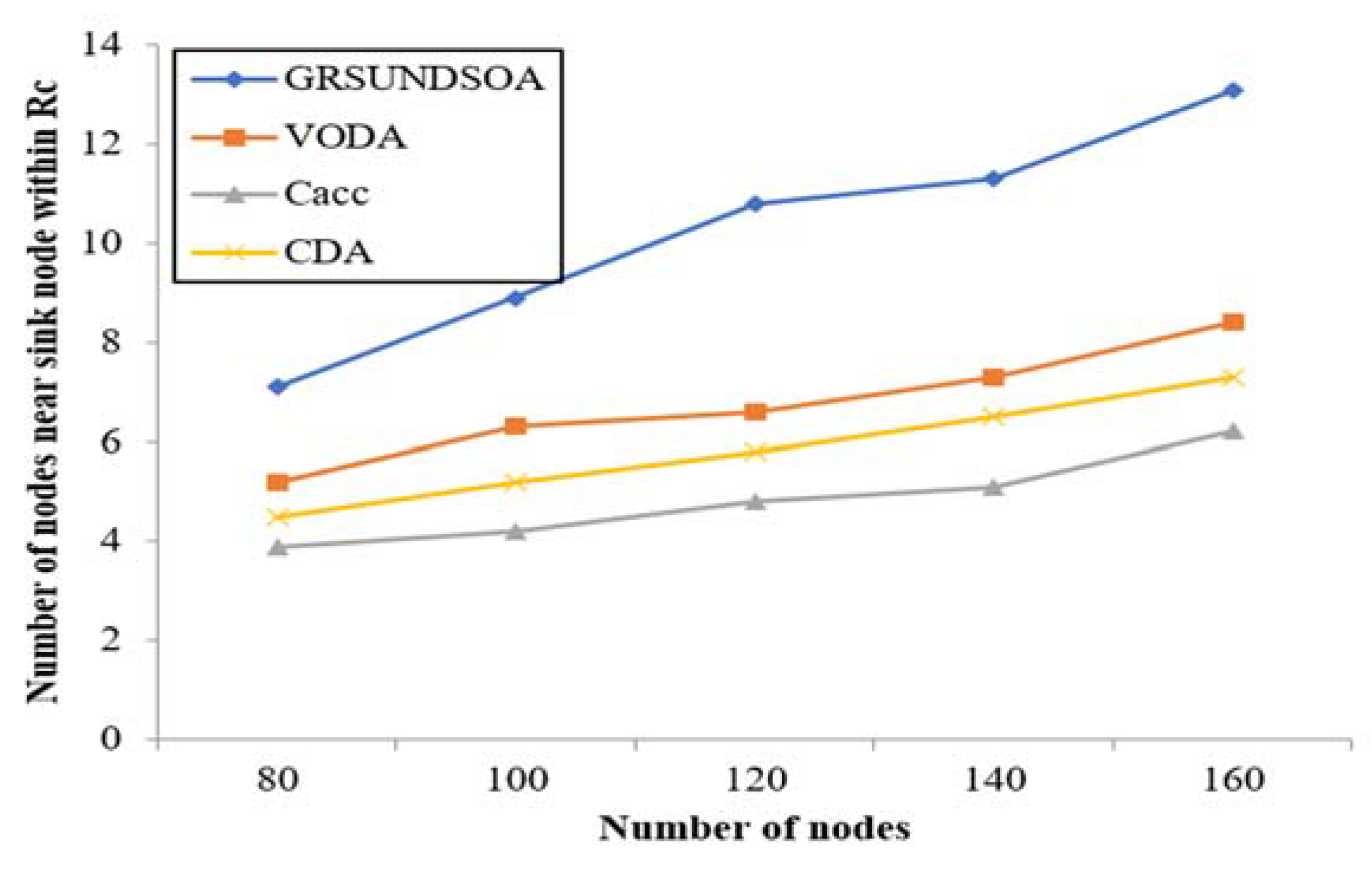
5.2.5. Analysis of the Average Node Degree, the node degree near Sink Node and Energy Balance
5.2.6. Average Path Length
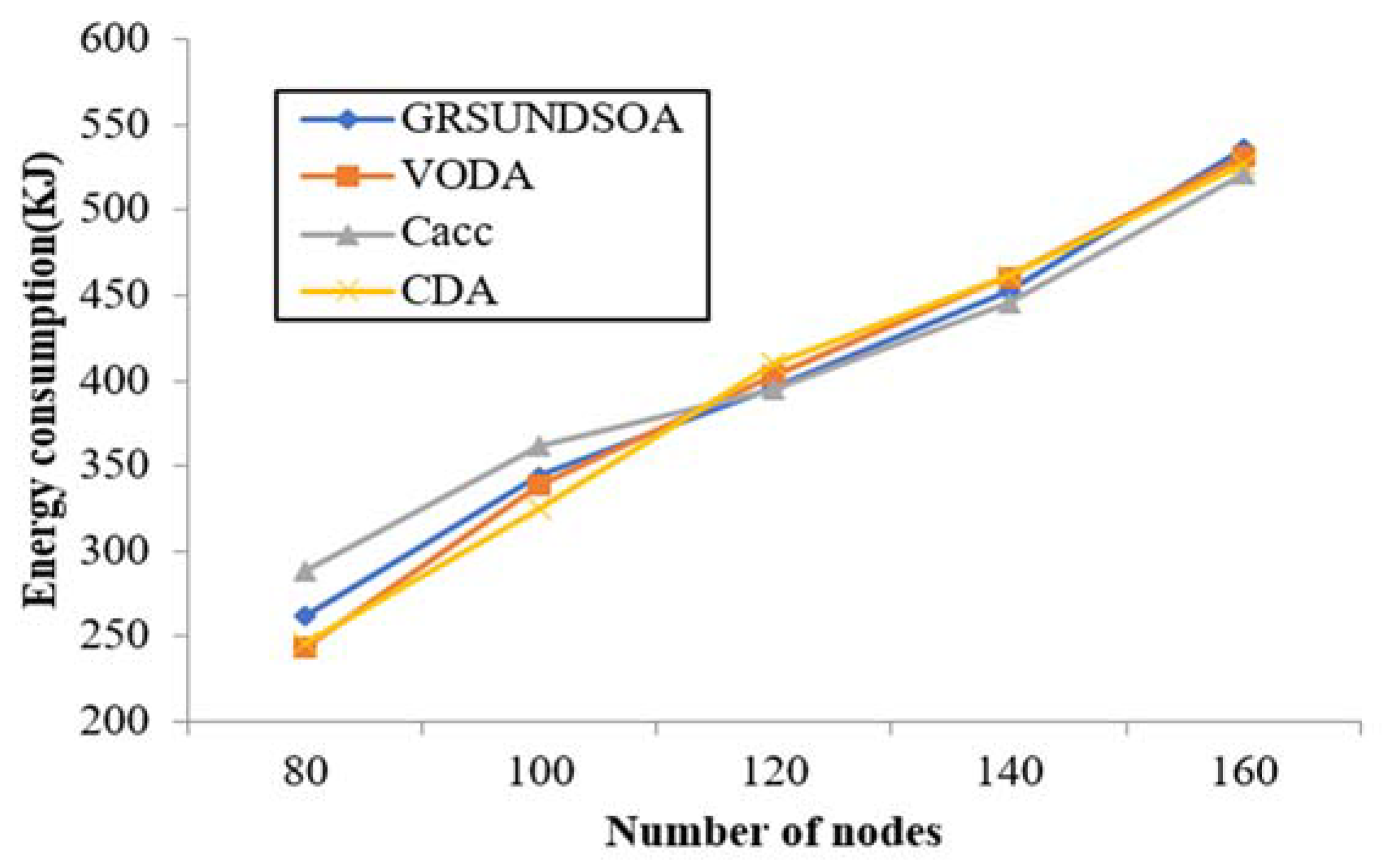
5.2.7. Deployment Energy Consumption
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Glossary
| Nomenclature | Definition |
| GRSUNDSOA | Growth Ring Style based Uneven Node Depth-adjustment Self-deployment Optimization Algorithm |
| GR | Growth Ring |
| SRNs | Subtree Root Nodes |
| FSRNs | Forward Subtree Root Nodes |
| BNS | Basic Node Set |
| HD | Horizontal Distance |
| ED | Expect Distance |
| OD | Offset Distance |
| MBCUEB | Model Based on Coverage Utilization and Energy Balance |
| Symbols | Definition |
| N | The number of sensors deployed in network |
| Nconnect | The number of sensors that connect with sink node |
| Rb | The communication radius of the sensor nodes |
| Rs | The sensing radius of the sensor nodes |
| Rcmax | The maximum communication radius of the sensor nodes |
| Nsi | The sensor node with ID i |
| Nsi.Z | The depth of Nsi under water |
| Ns | The sensor nodes set deployed in network |
| M | The entire monitoring area of UWSN |
| Length,Width,Height | Length—The length of the monitoring area; Width—The width of the monitoring area; Height—The height of the monitoring area |
| U(x,y,z) | A pixel in monitoring area |
| Pcov(x,y,z,Nsi ) | The probability that U(x,y,z) is covered by node Nsi |
| dist(Nsi,Nsj) | The Euclidean distance between Nsi and Nsj |
| d(Nsi,Nsj) | The HD between Nsi and Nsj |
| Edist(Nsi,Nsj) | The ED between Nsi and Nsj |
| DivNs(Nsi,Nsj) | The OD between Nsi and Nsj |
| distmax | The maximum Euclidean distance of all nodes from sink node |
| Pcov(U, Ns) | The probability that U is covered by Ns |
| Qi | The monitoring area of sensor node Nsi |
| η | The coverage rate of UWSN |
| Con | The connectivity rate of UWSN |
| V(Nsi, Nsj) | The volume of the overlapping area covered by Nsi and Nsj |
| The coverage utilization of Nsi | |
| g | The number of GR |
| Rootg | The g-th GR |
| basenodes | The current BNS |
| ∆r | The step length for the set {Rcmax, Rcmax-∆r, …., d(Nsi,Nsj)} |
| Nsin | The numbers of nodes within Rcmax from the sink node |
| Navg. | The average number of neighbor nodes for all sensors |
| W | The energy consumption for network deployment |
| D | The total distance that all nodes move during the deployment process |
| v | The moving speed of nodes |
| p | The power of nodes |
| Sg | The nodes within the g-th GR |
| Nsi.<id, tree, leaf, fathe, root, processed> | The attributions of Nsi. Nsi.id: ID of Nsi; Nsi.tree indicates whether Nsi joins the tree structure (1—Yes, 0—No); Nsi.father: the id of its parent node; Nsi.root: the root node of the tree to which Nsi is attached; Nsi. processed indicates whether Nsi has been calculated the diving depth (1—Yes, 0—No); Nsi.leaf indicates whether Nsi is a leaf node (1—Yes, 0—No). |
| distnodes | The ordered node set of Sg according to dist(Nsi, Sink) from largest to smallest |
| α | The adjustment parameter for communication radius |
| β | The adjustment parameter for communication radius |
| γ | The adjustment parameter for constructing Rootg from Sg |
| r | The random number |
| th | A threshold for constructing Rootg from Sg |
| μ | A non-negative integer threshold |
| δ | The set maximum of GR |
| ZNs(j) | The calculated depth of the basic node Nsj |
| Candidate(Nsi) | The dive candidate position points set of Nsi |
| One of candidate position points in Candidate(Nsi) | |
| a, b | The weights for MBCUEB, a+b = 1 |
| f(Nsi) | The comprehensive optimal model of Nsi on coverage utilization and energy balance |
References
- Li, S.; Qu, W.; Liu, C.; Qiu, T.; Zhao, Z. Survey on high reliability wireless communication for under water sensor networks. J. Netw. Comput. Appl. 2019, 148, 102446. [Google Scholar] [CrossRef]
- Sunhyo, K.; Jee, W.C. Optimal deployment of vector sensor nodes in underwater acoustic sensor networks. Sensors 2019, 19, 1–10. [Google Scholar]
- Wei, X.; Guo, H.; Wang, X.; Wang, X.; Wang, C.; Guizani, M.; Du, X. A co-design-based reliable low-latency and energy-efficient transmission protocol for UWSNs. Sensors 2020, 20, 6370. [Google Scholar] [CrossRef] [PubMed]
- Yang, G.; Dai, L.; Si, G.; Wang, X.; Wang, X. Challenges and security issues in under water wireless sensor networks. In Proceedings of the 2018 International Conference on Identification, Information and Knowledge in the Internet of Things, Beijing, China, 19–21 October 2018; pp. 210–216. [Google Scholar]
- Felemban, E.; Shaikh, F.K.; Qureshi, U.M. Underwater Sensor Network Applications: A Comprehensive Survey. Int. J. Distrib. Sens. Netw. 2015, 2015, 1–14. [Google Scholar] [CrossRef]
- Gupta, O.; Goyal, N. The evolution of data gathering static and mobility models in underwater wireless sensor networks: A survey. J. Ambient. Intell. Humaniz. Comput. 2021, 1–17. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, S.; Chen, Z.; Gao, X.; Chen, G. Coverage Problem with Uncertain Properties in Wireless Sensor Networks: A Survey. Comput. Netw. 2017, 123, 200–232. [Google Scholar] [CrossRef]
- Tuna, G.; Gungor, V.C. A survey on deployment techniques, localization algorithms, and research challenges for underwater acoustic sensor networks. Int. J. Commun. Syst. 2017, 30, e3350. [Google Scholar] [CrossRef]
- Wang, W.; Huang, H.; He, F.; Xiao, F.; Jiang, X.; Sha, C. An enhanced virtual force algorithm for diverse k-Coverage deployment of 3D underwater wireless sensor networks. Sensors 2019, 19, 3496. [Google Scholar] [CrossRef]
- Song, X.; Gong, Y.; Jin, D.; Li, Q. Nodes deployment optimization algorithm based on improved evidence theory of underwater wireless sensor networks. Photonic Netw. Commun. 2019, 37, 224–232. [Google Scholar] [CrossRef]
- Wang, X.; Qin, D.; Zhao, M.; Guo, R.; Berhane, T.M. UWSNs positioning technology based on iterative optimization and data position correction. J. Wirel. Com. Netw. 2020, 158, 2020. [Google Scholar] [CrossRef]
- Chen, L.; Hu, Y.; Sun, Y.; Liu, H.; Lv, B.; Chen, J. An underwater layered protocol based on cooperative communication for underwater sensor network. In Proceedings of the 2020 Chinese Control and Decision Conference (CCDC), Hefei, China, 23–25 May 2020; pp. 2014–2019. [Google Scholar]
- Kim, B.-S.; Sung, T.-E.; Kim, K.-I. An NS-3 implementation and experimental performance analysis of IEEE 802.15.6 standard under different deployment Scenarios. Int. J. Environ. Res. Public Health 2020, 17, 4007. [Google Scholar] [CrossRef]
- Campanile, L.; Gribaudo, M.; Iacono, M.; Marulli, F.; Mastroianni, M. Computer network simulation with ns-3: A systematic literature review. Electronics 2020, 9, 272. [Google Scholar] [CrossRef]
- Nobre, M.; Silva, I.; Guedes, L.A.; Portugal, P. Towards a WirelessHART module for the ns-3 simulator. In Proceedings of the 2010 IEEE 15th Conference on Emerging Technologies & Factory Automation (ETFA 2010), Bilbao, Spain, 13–16 September 2010; pp. 1–4. [Google Scholar]
- Han, F.; Liu, X.; Mohamed, I.I.; Ghazali, K.H.; Zhao, Y. A survey on deployment and coverage strategies in three-dimensional wireless sensor networks. In Proceedings of the 8th International Conference on Software and Computer Applications, ICSCA 2019, Penang, Malaysia, 19–21 February 2019; pp. 544–549. [Google Scholar]
- Shahanaghi, A.; Yang, Y.L.; Buehrer, R.M. Stochastic Link Modeling of Static Wireless Sensor Networks Over the Ocean Surface. IEEE Trans. Wirel. Commun. 2020, 19, 4154–4169. [Google Scholar] [CrossRef]
- Senouci, M.R.; Mellouk, A.; Asnoune, K.; Bouhidel, F.Y. Movement-assisted sensor deployment algorithms: A survey and taxonomy. IEEE Commun. Surv. Tutor. 2015, 17, 2493–2510. [Google Scholar] [CrossRef]
- Wang, J.; Ju, C.; Kim, H.-J.; Sherratt, R.S.; Lee, S. A mobile assisted coverage hole patching scheme based on particle swarm optimization for WSNs. Clust. Comput. 2019, 22, 1787–1795. [Google Scholar] [CrossRef]
- Kadu, R.; Malpe, K. Movement-assisted coverage improvement approach for hole healing in wireless sensor networks. In Proceedings of the 2017 2nd IEEE International Conference on Electrical, Computer and Communication Technologies (ICECCT), Tamil Nadu, India, 22–24 February 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–4. [Google Scholar]
- Wang, X.; Li, N.; Liu, F.; Ding, Y. The double-coverage algorithm for mobile node deployment in underwater sensor network. In Proceedings of the 5th International Conference on Geo-Spatial Knowledge and Intelligence, Chiang Mai, Thailand, 8–10 December 2017. [Google Scholar]
- Ding, Y.; Li, N.; Song, B.; Yang, Y. The mobile node deployment algorithm for underwater wireless sensor networks. In Proceedings of the 2017 Chinese Automation Congress, Jinan, China, 20–22 October 2017; pp. 456–460. [Google Scholar]
- Detweiler, C.; Doniec, M.; Vasilescu, I. Autonomous Depth Adjustment for Underwater Sensor Networks: Design and Applications. IEEE ASME Trans. Mechatron. 2012, 17, 16–24. [Google Scholar] [CrossRef]
- Chen, S.X.; Huang, Q.Z.; Zhang, Y.; Li, X. Double sink energy hole avoidance strategy for wireless sensor network. EURASIP J. Wirel. Commun. Netw. 2020, 2020, 226. [Google Scholar] [CrossRef]
- Kamran, L.; Nadeem, J.; Ashfaq, A.; Khan, Z.A.; Alrajeh, N.; Khan, M.I. On energy hole and coverage hole avoidance in underwater wireless sensor networks. IEEE Sens. J. 2016, 16, 4431–4442. [Google Scholar]
- Senel, F.; Akkaya, K.; Yilmaz, T. Autonomous deployment of sensors for maximized coverage and guaranteed connectivity in underwater acoustic sensor networks. In Proceedings of the IEEE 38th Conference on Local Computer Networks (LCN), Sydney, Australia, 21–24 October 2013. [Google Scholar]
- Senel, F.; Akkaya, K.; Erol-Kantarci, M.; Yilmaz, T. Self-deployment of mobile underwater acoustic sensor networks for maximized coverage and guaranteed connectivity. Ad. Hoc. Netw. 2015, 34, 170–183. [Google Scholar] [CrossRef]
- Senel, F. Coverage-aware connectivity-constrained unattended sensor deployment in underwater acoustic sensor networks. Wirel. Commun. Mob. Comput. 2016, 30, 70–77. [Google Scholar] [CrossRef]
- Su, Y.; Guo, L.; Jin, Z.; Fu, X. A Voronoi-Based Optimized Depth Adjustment Deployment Scheme for Underwater Acoustic Sensor Networks. IEEE Sens. J. 2020, 20, 13849–13860. [Google Scholar] [CrossRef]
- Jin, Z.; Ji, Z.; Su, Y. Deployment optimization algorithm using depth adjustable nodes in underwater acoustic networks. Syst. Eng. Electron. 2019, 41, 203–207. [Google Scholar]
- Nazrul Alam, S.M.; Haas, Z.J. Coverage and connectivity in three-dimensional networks. In Proceedings of the 12th Annual International Conference on Mobile Computing and Networking (MOBICOM ’06), Los Angeles, CA, USA, 23–29 September 2006; pp. 346–357. [Google Scholar]
- Jiang, P.; Xu, Y.; Wu, F. Node self-deployment algorithm based on an uneven cluster with radius adjusting for underwater sensor networks. Sensors 2016, 16, 98. [Google Scholar] [CrossRef]
- Wang, H.; Liu, M.; Zhang, S. An efficient depth-adjustment deployment scheme for underwater wireless sensor networks. In Proceedings of the 34th Chinese Control Conference, Hangzhou, China, 28–30 July 2015. [Google Scholar]
- Pompili, D.; Melodia, T.; Akyildiz, I.F. Deployment analysis in underwater acoustic wireless sensor networks. In Proceedings of the 1st ACM International Workshop on Underwater Networks, Los Angeles, CA, USA, September 2006; ACM: Los Angeles, CA, USA, 2006; pp. 48–55. [Google Scholar]
- Jiang, P.; Shuai, L.; Jun, L.; Wu, F.; Zhang, L. A depth-adjustment deployment algorithm based on two-dimensional convex hull and spanning tree for underwater wireless sensor networks. Sensors 2016, 16, 1087. [Google Scholar] [CrossRef] [PubMed]
- Akkaya, K.; Newell, A. Self-deployment of sensors for maximized coverage in underwater acoustic sensor networks. Comput. Commun. 2009, 32, 1233–1244. [Google Scholar] [CrossRef]
- Dux, Y.; Hui, L.I.; Lin, Z. Coverage algorithm based on fixed-directional movement for underwater sensor network. Comput. Eng. 2015, 41, 76–80. [Google Scholar]
- Javaid, N.; Ahmad, Z.; Sher, A.; Wadud, Z.; Khan, Z.A.; Ahmedn, S.H. Fair energy management with void hole avoidance in intelligent heterogeneous underwater WSNs. J. Ambient. Intell. Humaniz. Comput. 2019, 10, 4225–4241. [Google Scholar] [CrossRef]
- Erdem Emre, H.; Gungor Cagri, V. Analyzing lifetime of energy harvesting underwater wireless sensor nodes. Int. J. Commun. Syst. 2020, 33, e4214. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Names | Value |
|---|---|
| N | [80, 160] |
| Rs | 40 (m) |
| Rcmax | 80 (m) |
| α | [1.4, 1.8] |
| β | 0.25 |
| γ | 0.05 |
| th | 0.6 |
| v | 2.4 (m/min) |
| p | 0.6 (W) |
| ∆r | 1 (m) |
| a | 0.8 |
| b | 0.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, L.; He, Y.; Huangfu, Z. An Uneven Node Self-Deployment Optimization Algorithm for Maximized Coverage and Energy Balance in Underwater Wireless Sensor Networks. Sensors 2021, 21, 1368. https://doi.org/10.3390/s21041368
Yan L, He Y, Huangfu Z. An Uneven Node Self-Deployment Optimization Algorithm for Maximized Coverage and Energy Balance in Underwater Wireless Sensor Networks. Sensors. 2021; 21(4):1368. https://doi.org/10.3390/s21041368
Chicago/Turabian StyleYan, Luoheng, Yuyao He, and Zhongmin Huangfu. 2021. "An Uneven Node Self-Deployment Optimization Algorithm for Maximized Coverage and Energy Balance in Underwater Wireless Sensor Networks" Sensors 21, no. 4: 1368. https://doi.org/10.3390/s21041368
APA StyleYan, L., He, Y., & Huangfu, Z. (2021). An Uneven Node Self-Deployment Optimization Algorithm for Maximized Coverage and Energy Balance in Underwater Wireless Sensor Networks. Sensors, 21(4), 1368. https://doi.org/10.3390/s21041368