
Design, Implementation, and Measurement Procedure of Underwater and Water Surface Antenna for LoRa Communication


Abstract
1. Introduction
Literature Review
2. Materials and Methods
2.1. Antenna Design
Base Antenna
2.2. Braid Antenna
2.2.1. Braid Antenna Simulation
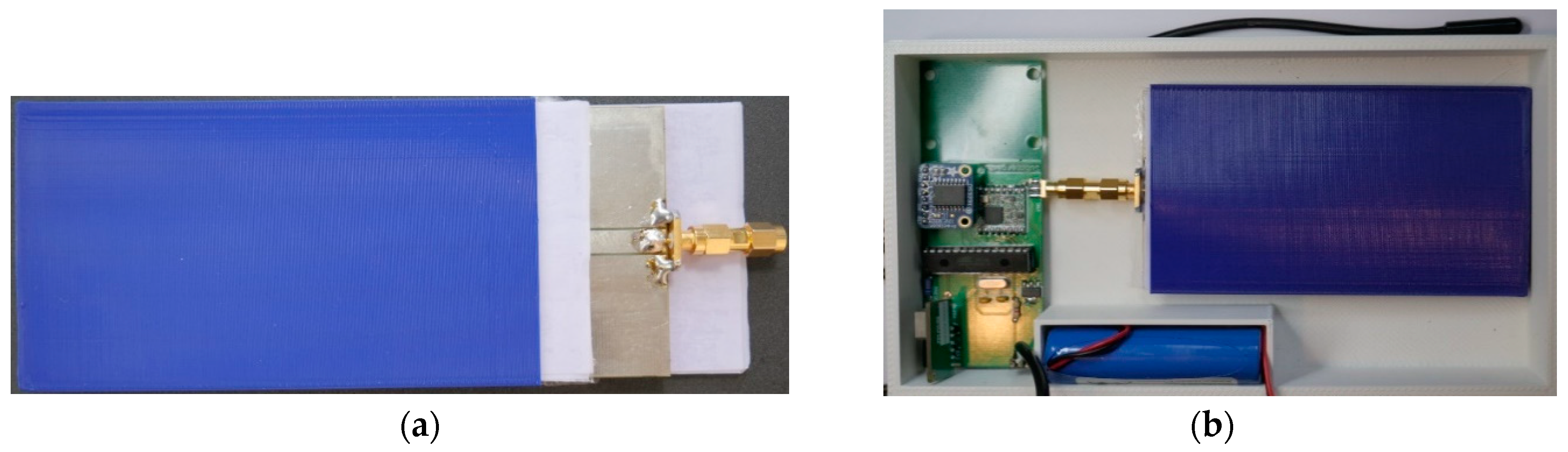
2.2.2. Fabrication
2.2.3. Received Signal Strength Indicator (RSSI) Tests
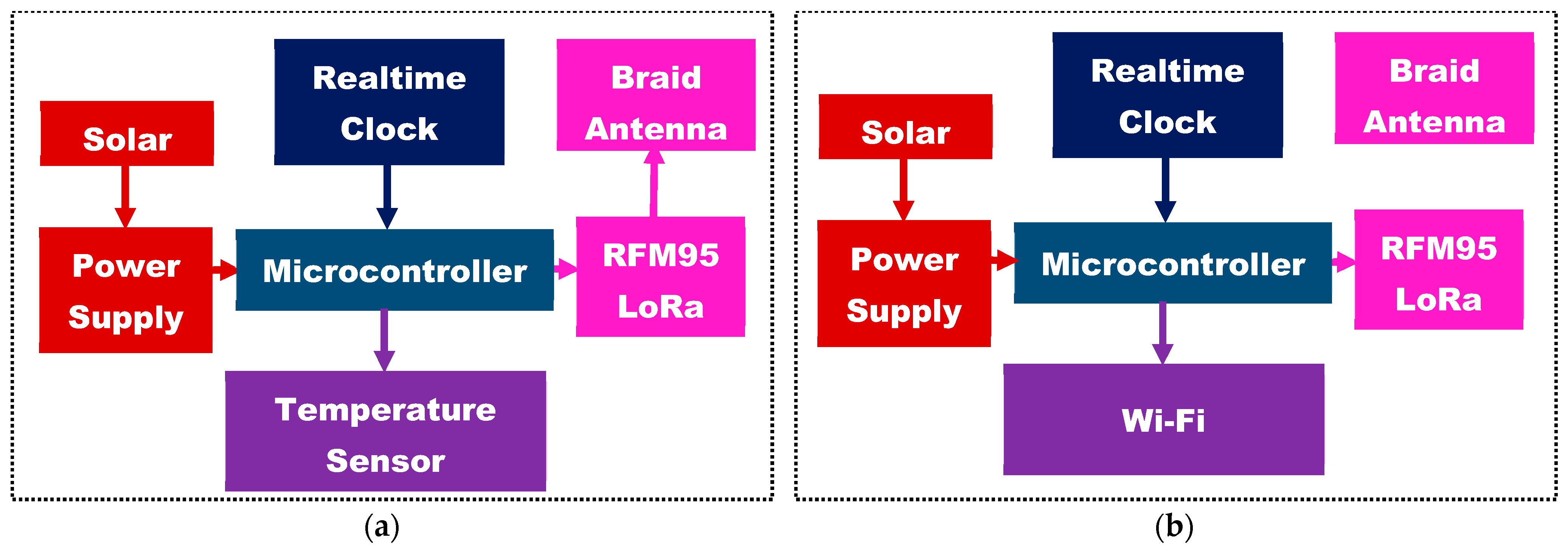
2.3. Systems Integration
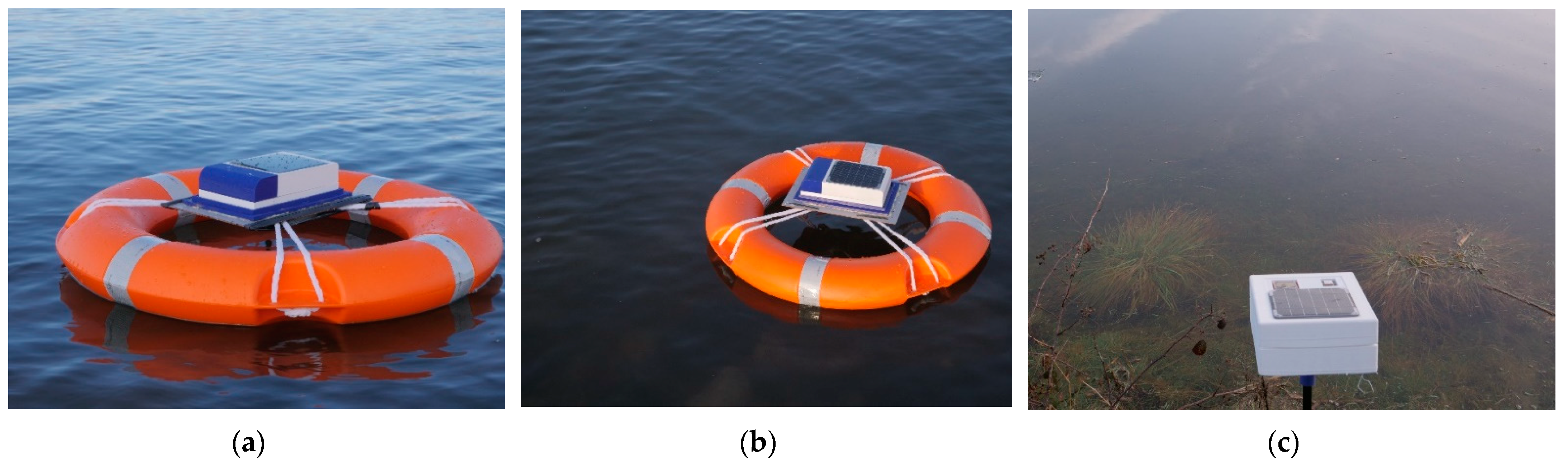
2.4. Submerged and Water Surface Antennas
2.4.1. Buffer Design
2.4.2. Oil-impregnated Paper Buffer
2.5. VNA Tests
2.6. SN RSSI Tests
3. Results
3.1. Braid Antenna
3.1.1. Simulations
3.1.2. Fabrication
3.1.3. RSSI Tests
3.2. Oil-Impregnated Barrier
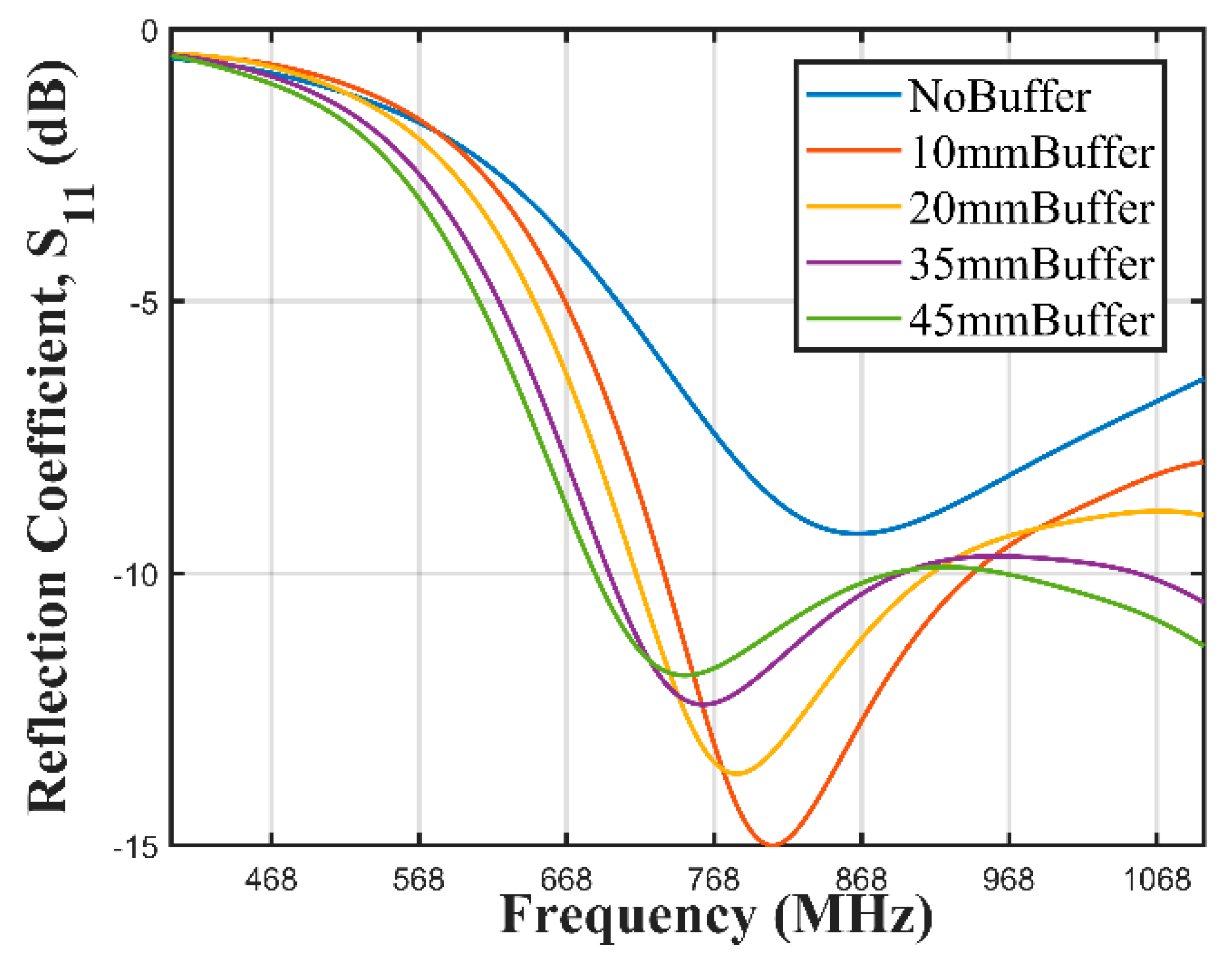
3.2.1. Simulation
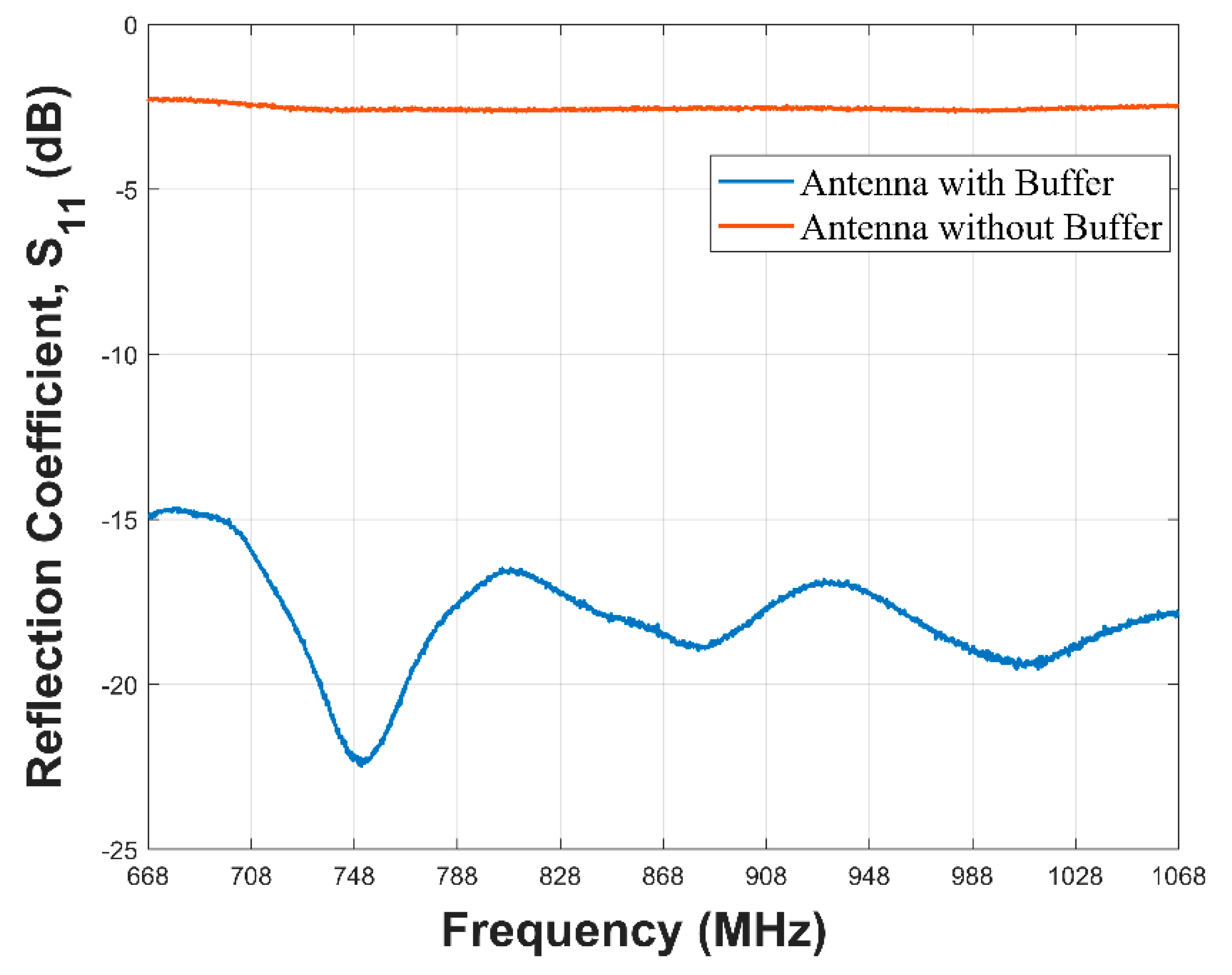
3.2.2. VNA Experiment
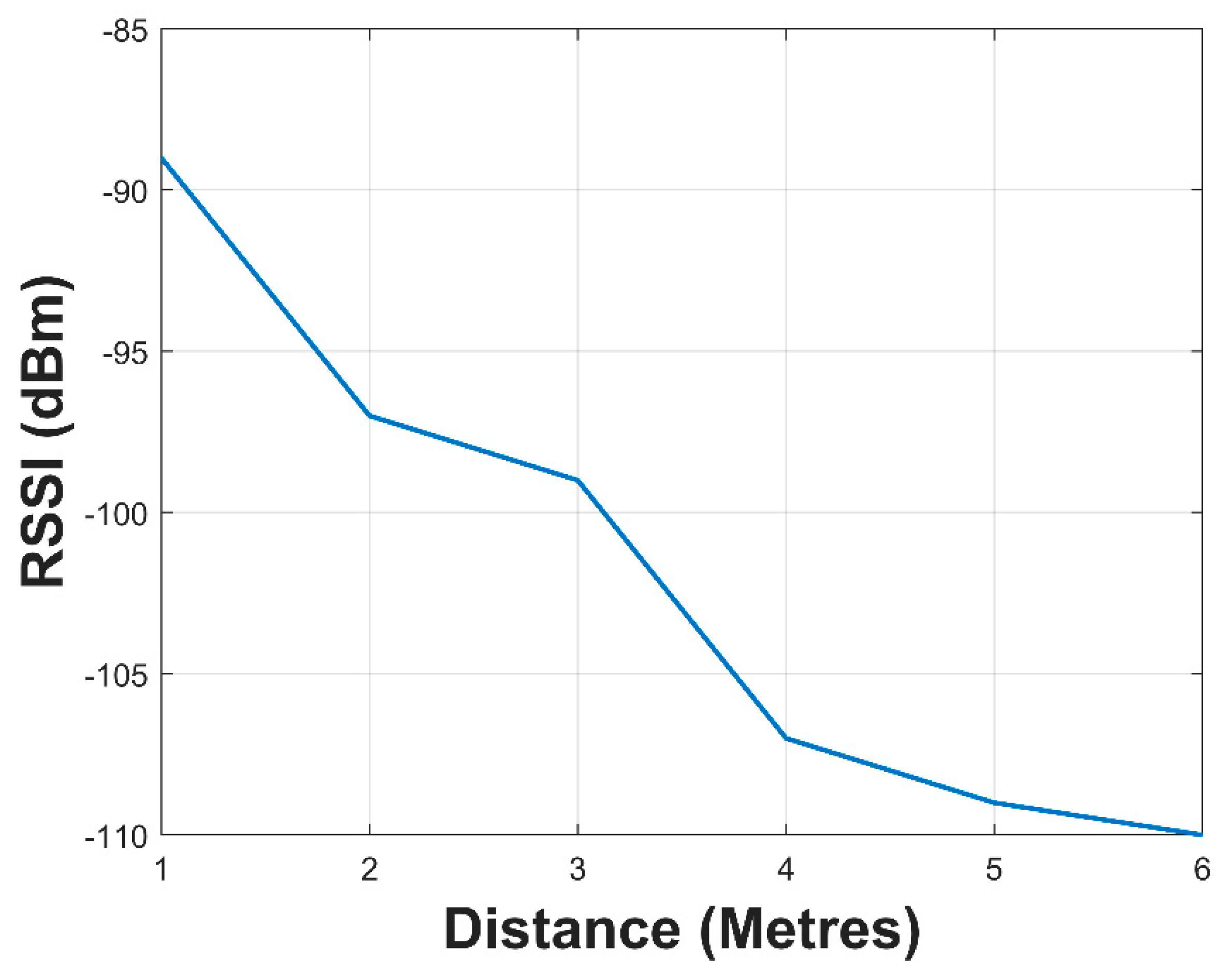
3.2.3. SN RSSI Tests
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Appeltans, W.; Ahyong, S.T.; Anderson, G.; Angel, M.V.; Artois, T.; Bailly, N.; Bamber, R.; Barber, A.; Bartsch, I.; Berta, A.; et al. The Magnitude of Global Marine Species Diversity. Curr. Biol. 2012. Available online: https://reader.elsevier.com/reader/sd/pii/S0960982212011384?token=AA7E484E3CA611F67A35F52D648890F8A46B8FCB80620768814CCE56CE20F5010AC1D044EC5EC61DBE3BA6DD8DFD3B8C (accessed on 26 January 2021). [CrossRef] [PubMed]
- Powles, H.; Bradford, M.J.; Bradford, R.G.; Doubleday, W.G.; Innes, S.; Levings, C.D. Assessing and protecting endangered marine species. ICES J. Mar. Sci. 2000, 57, 669–676. [Google Scholar] [CrossRef]
- Li, P.; Cai, Q.; Lin, W.; Chen, B.; Zhang, B. Offshore oil spill response practices and emerging challenges. Mar. Pollut. Bull. 2016, 110, 6–27. [Google Scholar] [CrossRef] [PubMed]
- Beyer, J.; Trannum, H.C.; Bakke, T.; Hodson, P.V.; Collier, T.K. Environmental effects of the Deepwater Horizon oil spill: A review. Mar. Pollut. Bull. 2016, 110, 28–51. [Google Scholar] [CrossRef] [PubMed]
- Okafor-Yarwood, I. The effects of oil pollution on the marine environment in the Gulf of Guinea—the Bonga Oil Field example. Transnatl. Leg. Theory 2018, 9, 254–271. [Google Scholar] [CrossRef]
- Zhang, T.; Han, G.; Chen, Y.; Shu, L. Deep-Sea Search and Recovery with and without an Underwater Vehicle. J. Internet Technol. 2019, 20, 1837–1847. [Google Scholar]
- Toro, N.; Robles, P.; Jeldres, R.I. Seabed mineral resources, an alternative for the future of renewable energy: A critical review. Ore Geol. Rev. 2020, 126, 103699. [Google Scholar] [CrossRef]
- Sun, S.; Zhang, X.; Zheng, C.; Fu, J.; Zhao, C. Underwater Acoustical Localization of the Black Box Utilizing Single Autonomous Underwater Vehicle Based on the Second-Order Time Difference of Arrival. IEEE J. Ocean. Eng. 2020, 45, 1268–1279. [Google Scholar] [CrossRef]
- Che, X.; Wells, I.; Dickers, G.; Kear, P. TDMA frame design for a prototype underwater RF communication network. Ad Hoc Netw. 2012, 10, 317–327. [Google Scholar] [CrossRef]
- Kaushal, H.; Kaddoum, G. Underwater Optical Wireless Communication. IEEE Access 2016, 4, 1518–1547. [Google Scholar] [CrossRef]
- Guo, J.; Zheng, R.; Yu, X.; Wei, A.; Yang, B. Autonomous underwater vehicle docking system based on wired transmission. In Proceedings of the 2018 WRC Symposium on Advanced Robotics and Automation (WRC SARA), Beijing, China, 16 August 2018. [Google Scholar] [CrossRef]
- Rako-Gospić, N.; Picciulin, M. Chapter 20—Underwater Noise: Sources and Effects on Marine Life. In World Seas: An Environmental Evaluation, 2nd ed.; Sheppard, C., Ed.; Academic Press: London, UK; San Diego, CA, USA; Cambridge, MA, USA; Oxford, UK, 2019; pp. 367–389. [Google Scholar]
- Centelles, D.; Soriano, A.; Marin, R.; Sanz, P.J. Wireless HROV Control with Compressed Visual Feedback Using Acoustic and RF Links. J. Intell. Robot. Syst. 2020, 99, 713–728. [Google Scholar] [CrossRef]
- Han, S.; Noh, Y.; Lee, U.; Gerla, M. Optical-acoustic hybrid network toward real-time video streaming for mobile underwater sensors. Ad Hoc Netw. 2019, 83, 1–7. [Google Scholar] [CrossRef]
- Sinha, R.S.; Wei, Y.; Hwang, S.-H. A survey on LPWA technology: LoRa and NB-IoT. ICT Express 2017, 3, 14–21. [Google Scholar] [CrossRef]
- Madeo, D.; Pozzebon, A.; Mocenni, C.; Bertoni, D. A Low-Cost Unmanned Surface Vehicle for Pervasive Water Quality Monitoring. IEEE Trans. Instrum. Meas. 2020, 69, 1433–1444. [Google Scholar] [CrossRef]
- Cecílio, J.; Ferreira, P.M.; Casimiro, A. Evaluation of LoRa Technology in Flooding Prevention Scenarios. Sensors 2020, 20, 4034. [Google Scholar] [CrossRef] [PubMed]
- Li, L.; Ren, J.; Zhu, Q. On the application of LoRa LPWAN technology in Sailing Monitoring System. In Proceedings of the 2017 13th Annual Conference on Wireless On-demand Network Systems and Services (WONS), Jackson, WI, USA, 21–24 February 2017; pp. 77–80. [Google Scholar]
- Sinitsyn, M.E.; Podstrigaev, A.S.; Smolyakov, A.V.; Davydov, V.V. Analysis of the Sea Surface Influence on the Shape of Microwave Spiral Antenna Radiation Pattern. In Proceedings of the 2019 Antennas Design and Measurement International Conference (ADMInC), Saint Petersburg, Russia, 16–18 October 2019; pp. 72–74. [Google Scholar]
- Gragnani, G.L.; Caviglia, D.D.; Montecucco, C. A Log-Periodic Antenna for Long Range Communication Within a Wireless Sensor Network System for Sea Water Quality Monitoring. In Proceedings of the 2018 Advances in Wireless and Optical Communications (RTUWO), Riga, Latvia, 15–16 November 2018; pp. 161–166. [Google Scholar]
- Ryecroft, S.; Shaw, A.; Fergus, P.; Kot, P.; Hashim, K.; Moody, A.; Conway, L. A First Implementation of Underwater Communications in Raw Water Using the 433 MHz Frequency Combined with a Bowtie Antenna. Sensors 2019, 19, 1813. [Google Scholar] [CrossRef] [PubMed]
- Abdou, A.A.; Shaw, A.; Mason, A.; Al-Shamma’A, A.; Cullen, J.; Wylie, S.; Diallo, M. A matched Bow-tie antenna at 433MHz for use in underwater wireless sensor networks. J. Phys. Conf. Ser. 2013, 450, 012048. [Google Scholar] [CrossRef]
- Ray, K.P. Design Aspects of Printed Monopole Antennas for Ultra-Wide Band Applications. Int. J. Antennas Propag. 2008, 2008, 1–8. [Google Scholar] [CrossRef]
- Farah, S.; Anderson, D.G.; Langer, R. Physical and mechanical properties of PLA, and their functions in widespread applications—A comprehensive review. Adv. Drug Deliv. Rev. 2016, 107, 367–392. [Google Scholar] [CrossRef] [PubMed]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Substrate length | 120 mm | |
| Substrate width | 70 mm | |
| Substrate thickness | 2.4 mm | |
| Feed length | 30 mm | |
| Feed width | 6 mm | |
| CPW length | 15 mm | |
| CPW width | 31.41 mm | |
| Triangular side length | 95.52 mm | |
| Dielectric constant FR-4 | 4.3 | |
| Dielectric constant oil paper | 3.87 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dala, A.; Arslan, T. Design, Implementation, and Measurement Procedure of Underwater and Water Surface Antenna for LoRa Communication. Sensors 2021, 21, 1337. https://doi.org/10.3390/s21041337
Dala A, Arslan T. Design, Implementation, and Measurement Procedure of Underwater and Water Surface Antenna for LoRa Communication. Sensors. 2021; 21(4):1337. https://doi.org/10.3390/s21041337
Chicago/Turabian StyleDala, Aliyu, and Tughrul Arslan. 2021. "Design, Implementation, and Measurement Procedure of Underwater and Water Surface Antenna for LoRa Communication" Sensors 21, no. 4: 1337. https://doi.org/10.3390/s21041337
APA StyleDala, A., & Arslan, T. (2021). Design, Implementation, and Measurement Procedure of Underwater and Water Surface Antenna for LoRa Communication. Sensors, 21(4), 1337. https://doi.org/10.3390/s21041337