
Piezoelectric Ring Bender for Characterization of Shear Waves in Compacted Sandy Soils


Abstract
1. Introduction
2. Materials and Methods
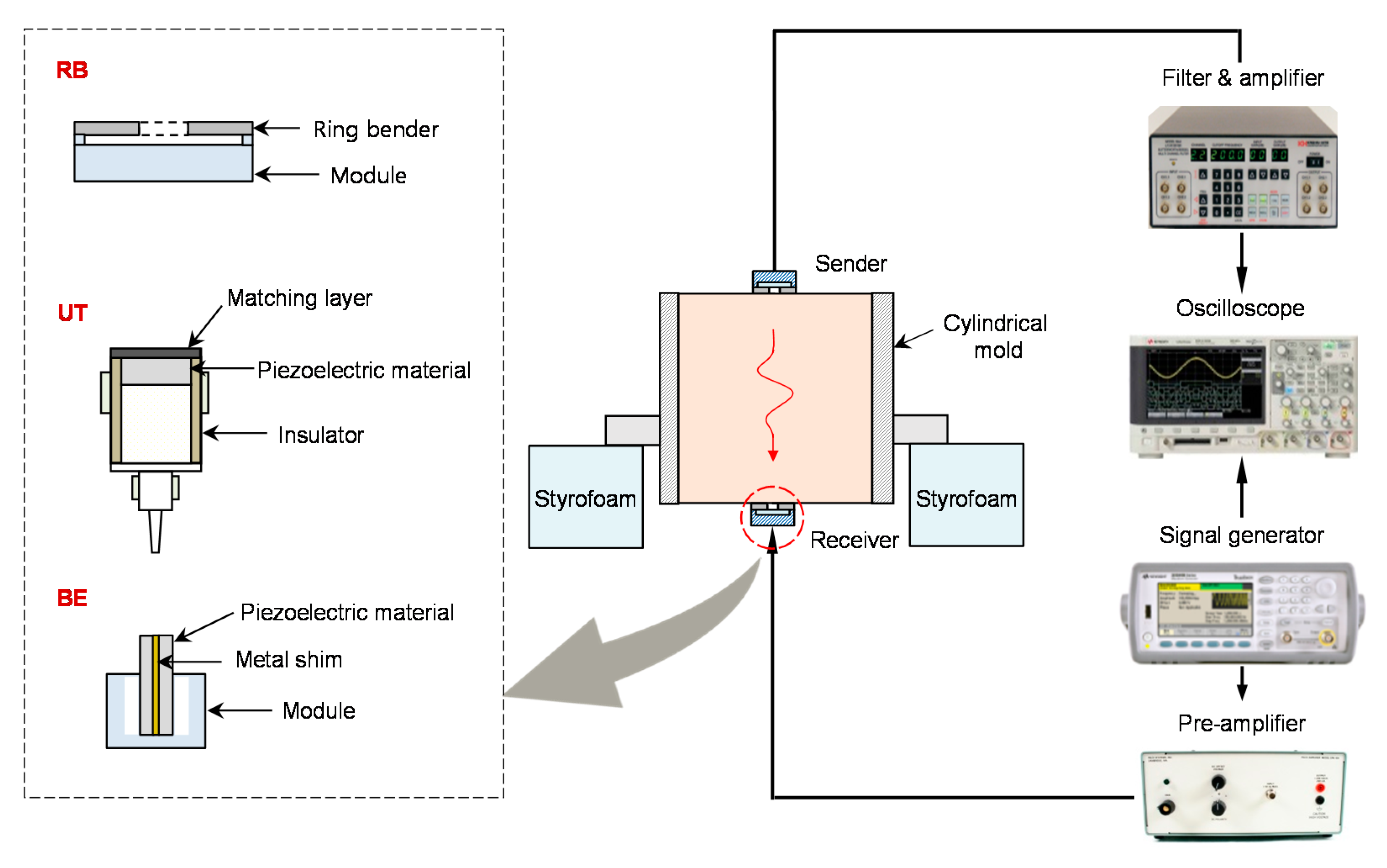
2.1. Ring Bender
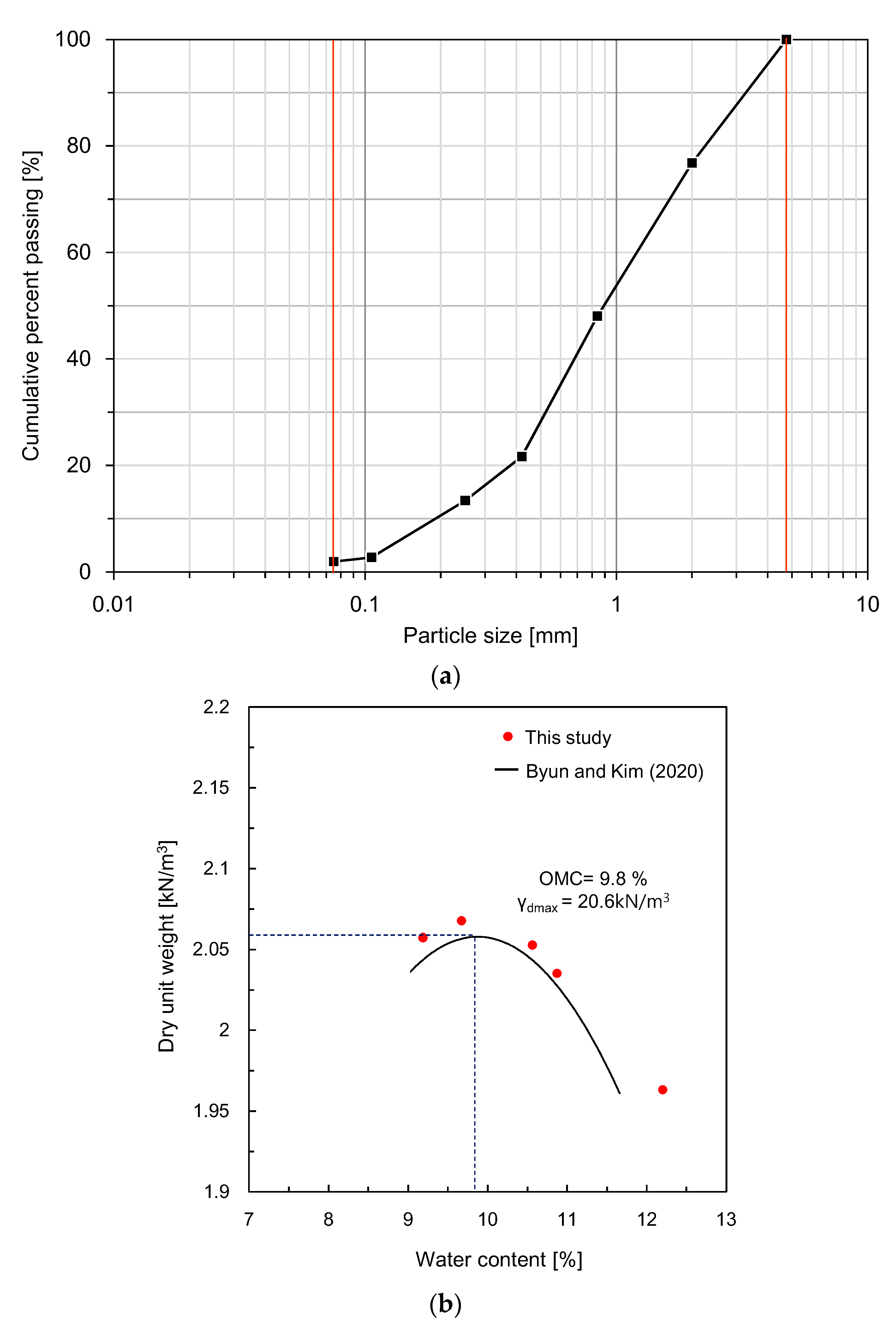
2.2. Specimen Preparation
2.3. Shear Wave Monitoring
3. Results and Discussion
3.1. Time-Domain Response
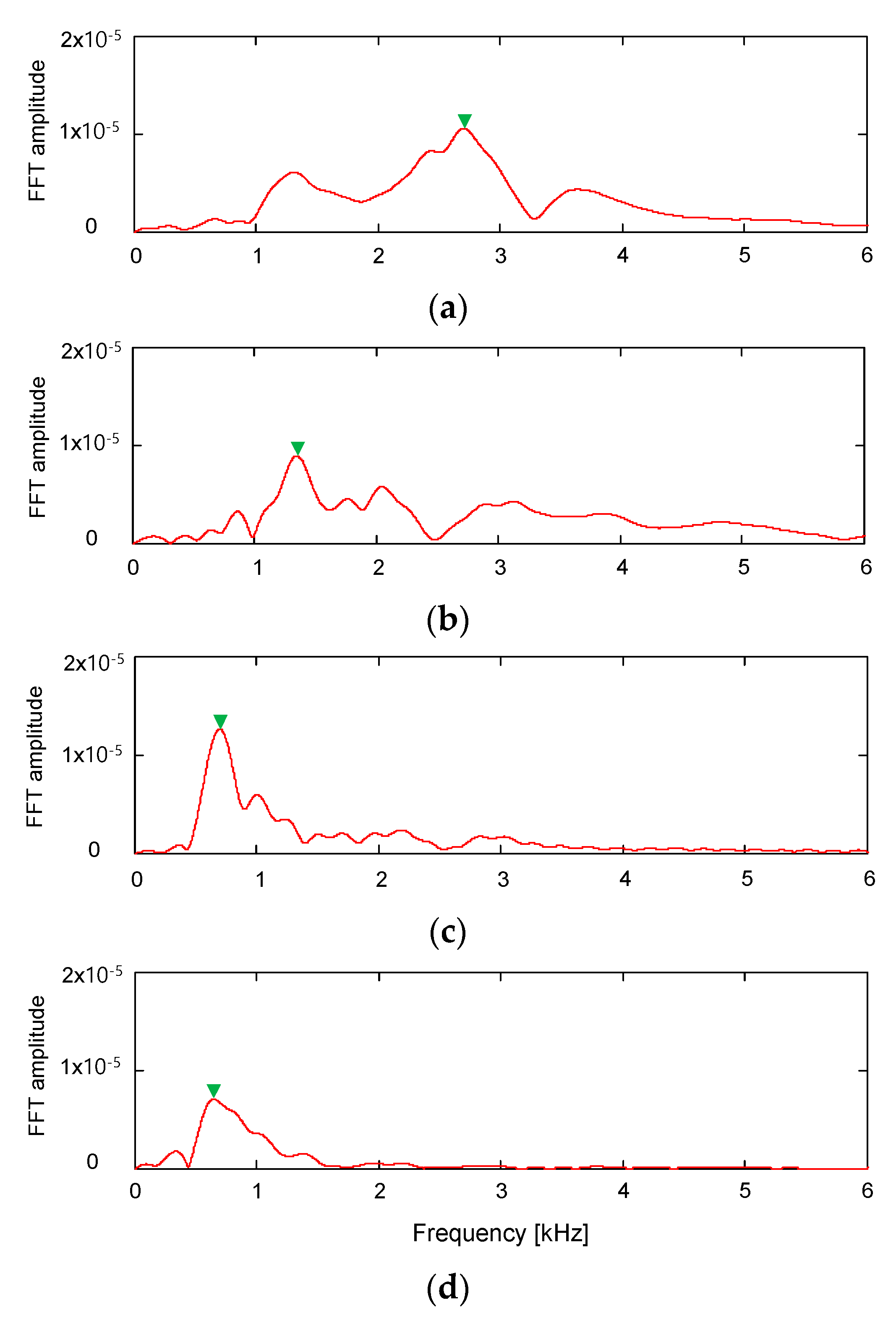
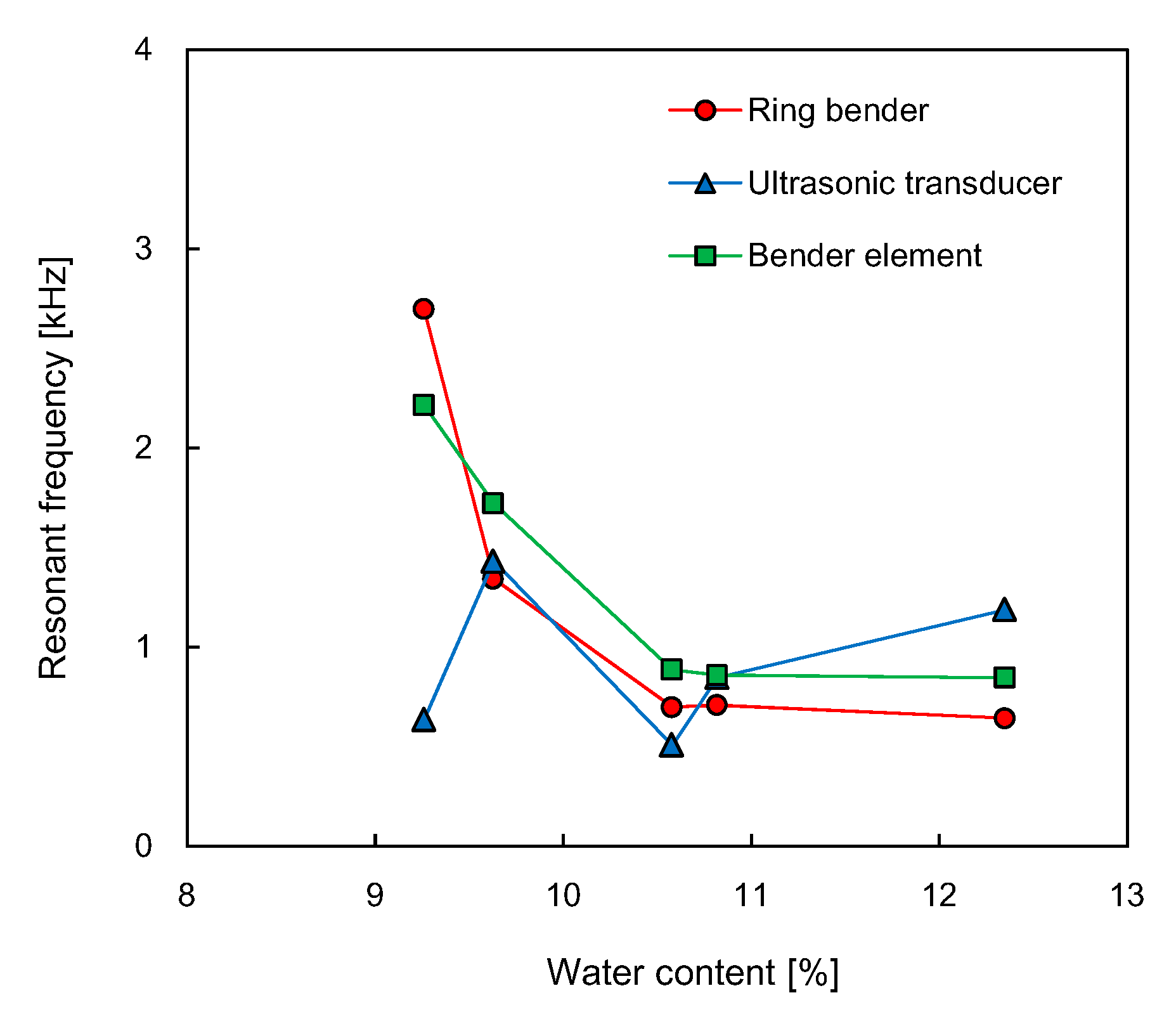
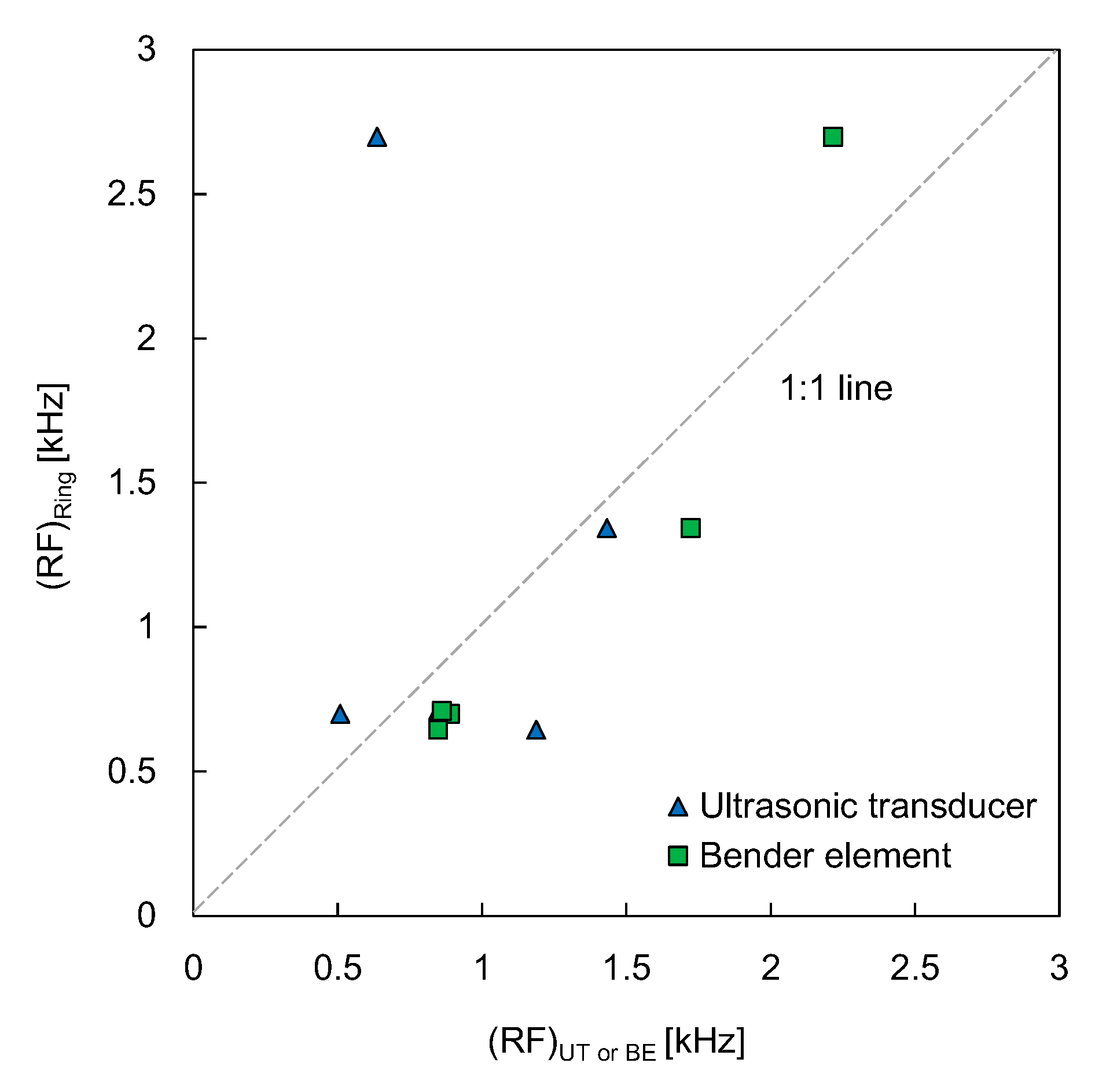
3.2. Frequency Domain Response
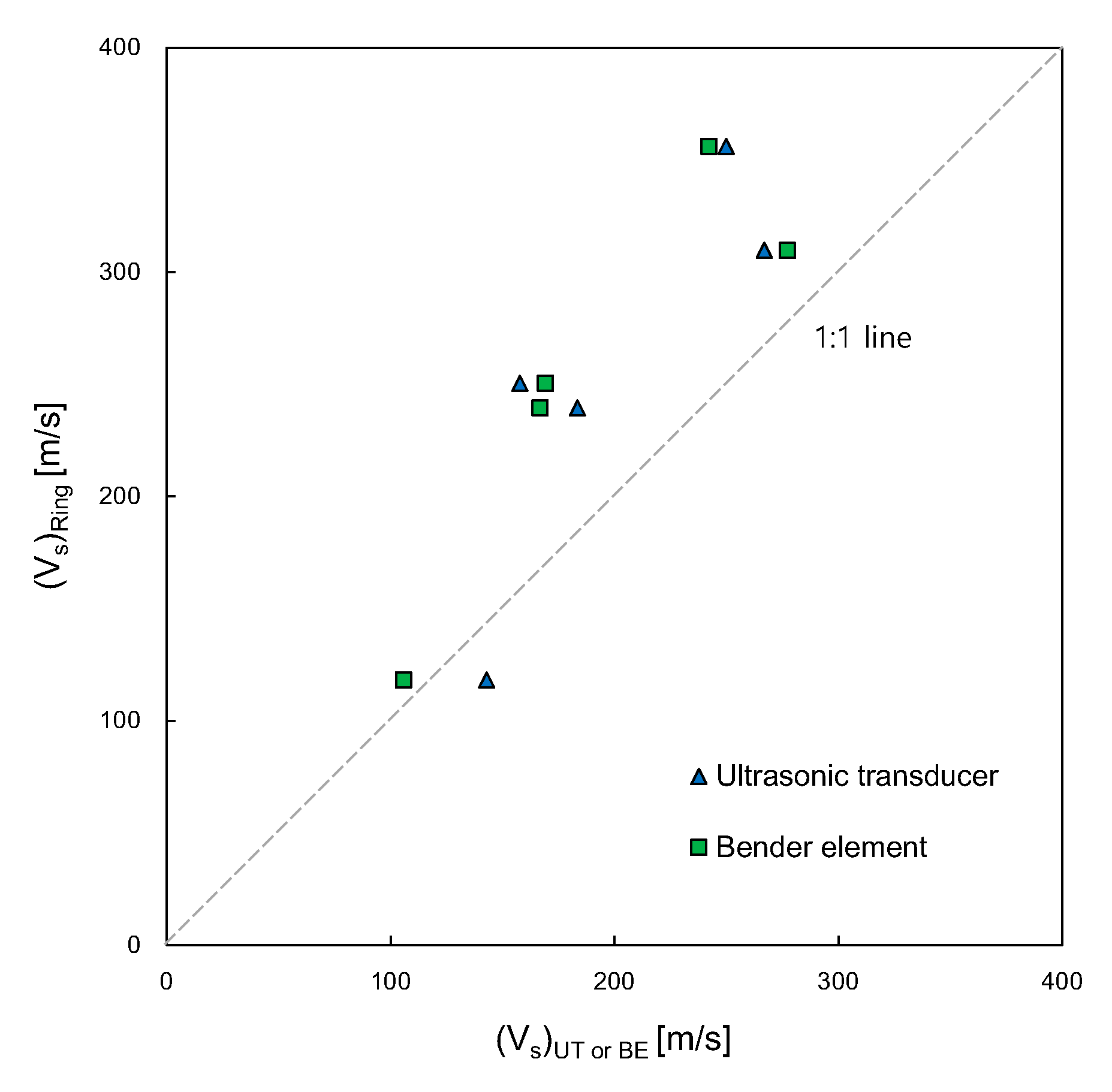
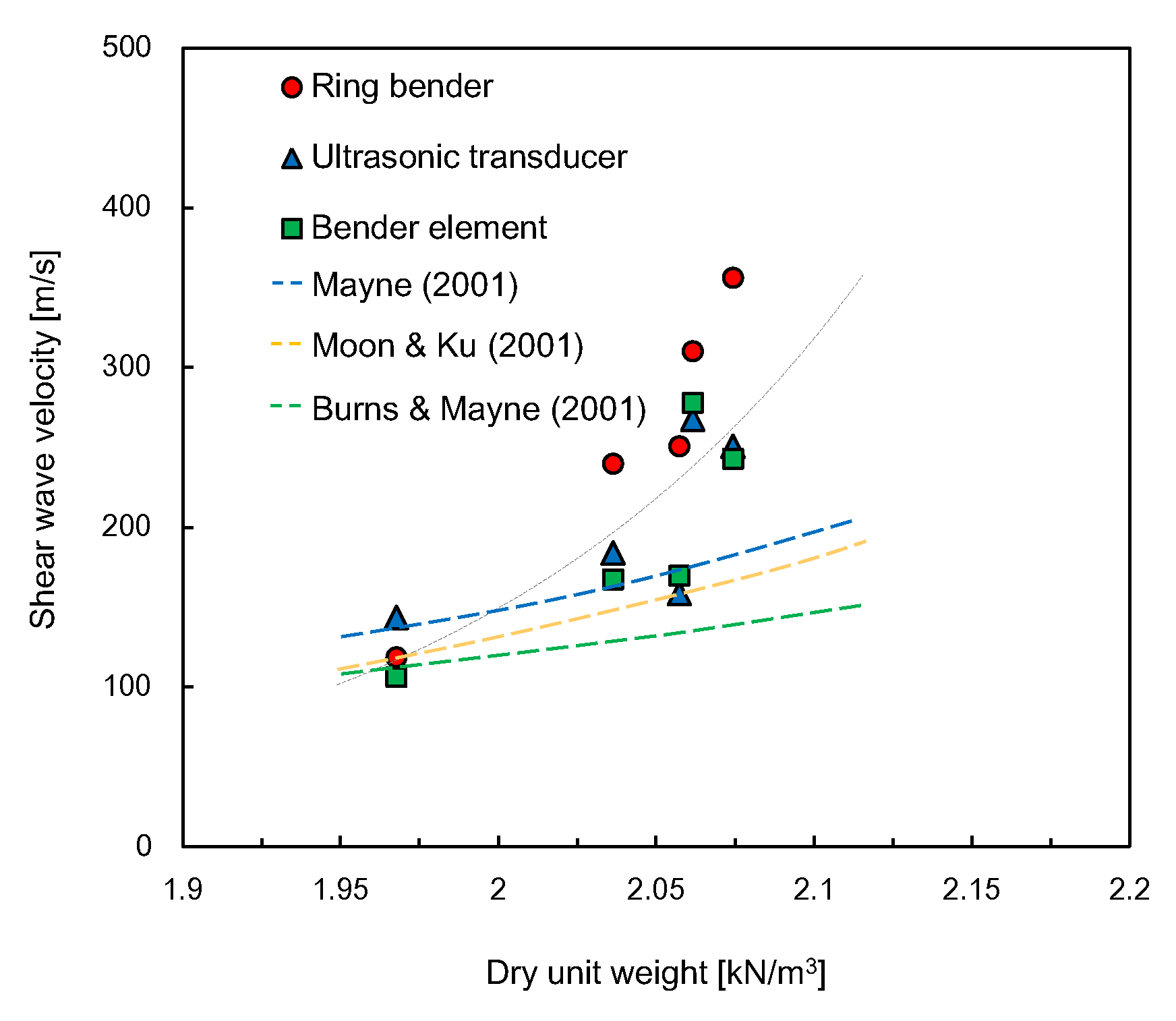
3.3. Shear Wave Velocity
3.4. Small-Strain Shear Modulus
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Vucetic, M. Cyclic threshold shear strains in soils. J. Geotech. Eng. 1994, 120, 2208–2228. [Google Scholar] [CrossRef]
- Richart, F.E.; Hall, J.R.; Woods, R.D. Vibration of Soils and Foundations; Prentice Hall, Inc.: Englewood Cliffs, NJ, USA, 1970. [Google Scholar]
- Vucetic, M.; Dobry, R. Effect of soil plasticity on cyclic response. J. Geotech. Eng. 1991, 117, 89–107. [Google Scholar] [CrossRef]
- Ishibashi, I. Discussion of “Effect of soil plasticity on cyclic response” by Mladen Vucetic and Ricardo Dobry (January, 1991, Vol. 117, No. 1). J. Geotech. Eng. 1992, 118, 830–832. [Google Scholar] [CrossRef]
- Ahmad, S. Piezoelectric Device for Measuring Shear Wave Velocity of Soils and Evaluation of Low and High Strain Shear Modulus. Ph.D. Thesis, The University of Western, London, ON, Canada, 2016. [Google Scholar]
- Longzhu, C.; Shiming, W.; Guoxi, Z. Propagation of elastic waves in water-saturated soils. Acta Mech. Sin. 1987, 3, 92–100. [Google Scholar] [CrossRef]
- Hussien, M.N.; Karray, M. Shear wave velocity as a geotechnical parameter: An overview. Can. Geotech. J. 2016, 53, 252–272. [Google Scholar] [CrossRef]
- Lee, J.S.; Santamarina, J.C. Bender elements: Performance and signal interpretation. J. Geotech. Geoenviron. Eng. 2005, 131, 1063–1070. [Google Scholar] [CrossRef]
- Youn, J.U.; Choo, Y.W.; Kim, D.S. Measurement of small-strain shear modulus G max of dry and saturated sands by bender element, resonant column, and torsional shear tests. Can. Geotech. J. 2008, 45, 1426–1438. [Google Scholar] [CrossRef]
- Gu, X.; Yang, J.; Huang, M.; Gao, G. Bender element tests in dry and saturated sand: Signal interpretation and result comparison. Soils Found. 2015, 55, 951–962. [Google Scholar] [CrossRef]
- L’Heureux, J.; Long, M. Relationship between shear-wave velocity and geotechnical parameters for Norwegian clays. J. Geotech. Geoenviron. Eng. 2017, 143, 04017013. [Google Scholar] [CrossRef]
- Airey, D.; Mohsin, A.K.M. Evaluation of shear wave velocity from bender elements using cross-correlation. Geotech. Test. J. 2013, 36, 506–514. [Google Scholar] [CrossRef]
- Mohammad, R. Dynamic Properties of Compacted Soils Using Resonant Column with Self-Contained Bender Elements. Master’s Thesis, University of Texas, Arlington, VA, USA, 2008. [Google Scholar]
- Ghayoomi, M.; Suprunenko, G.; Mirshekari, M. Cyclic triaxial test to measure strain-dependent shear modulus of unsaturated sand. Int. J. Geomech. 2017, 17, 04017043. [Google Scholar] [CrossRef]
- Karray, M.; Ben Romdhan, M.; Hussien, M.N.; Éthier, Y. Measuring shear wave velocity of granular material using the piezoelectric ring-actuator technique (P-RAT). Can. Geotech. J. 2015, 52, 1302–1317. [Google Scholar] [CrossRef]
- Anderson, D.G.; Woods, R.D. Comparison of field and laboratory shear moduli. In Proceedings of the In Situ Measurement of Soil Properties; ASCE 1: Raleigh, NC, USA, 1–4 June 1975; pp. 66–92. [Google Scholar]
- Larsson, R.; Mulabdic, M. Shear Moduli in Scandinavian Clays; Report No. 40; Swedish Geotechnical Institute: Linköping, Sweden, 1991. [Google Scholar]
- Lefebvre, G.; Leboeuf, D.; Rahhal, M.E.; Lacroix, A.; Warde, J.; Stokoe Ii, K.H. Laboratory and field determinations of small-strain shear modulus for a structured Champlain clay. Can. Geotech. J. 1994, 31, 61–70. [Google Scholar] [CrossRef]
- Darendeli, M.B. Development of a New Family of Normalized Modulus Reduction and Material Damping Curves. Ph.D. Thesis, University of Texas, Austin, TX, USA, 2001. [Google Scholar]
- Carlton, B.D.; Pestana, J.M. A unified model for estimating the in-situ small strain shear modulus of clays, silts, sands, and gravels. Soil Dyn. Earthq. Eng. 2016, 88, 345–355. [Google Scholar] [CrossRef]
- Luna, R.; Jadi, H. Determination of dynamic soil properties using geophysical methods. In Proceedings of the First International Conference on the Application of Geophysical and NDT Methodologies to Transportation Facilities and Infrastructure, St. Louis, MO, USA, 11–15 December 2000; pp. 1–15. [Google Scholar]
- Knutsen, M. On Determination of Gmax by Bender Element and Cross-Hole Testing. Master’s Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2014. [Google Scholar]
- Keramati, M.; Shariatmadari, N.; Sabbaghi, M.; Sadegh Abedin, M.S. Effect of confining stress and loading frequency on dynamic behavior of municipal solid waste in Kahrizak landfill. Int. J. Environ. Sci. Technol. 2018, 15, 1257–1264. [Google Scholar] [CrossRef]
- Nazarian, S.; Stokoe, K.H., II; Hudson, W.R. Use of spectral analysis of surface waves method for determination of moduli and thicknesses of pavement systems. Transp. Res. Rec. 1983, 930, 38–45. [Google Scholar]
- Luke, B.A.; Ii, K.H.S. Application of SASW method underwater. J. Geotech. Geoenviron. Eng. 1998, 124, 523–531. [Google Scholar] [CrossRef]
- Gucunski, N.; Woods, R.D. Numerical simulation of the SASW test. Soil Dyn. Earthq. Eng. 1992, 11, 213–227. [Google Scholar] [CrossRef]
- Orozco, M.C. Inversion Method for Spectral Analysis of Surface Waves (SASW). Ph.D. Thesis, Georgia Institute of Technology, Atlanta, GA, USA, 2003. [Google Scholar]
- Gucunski, N.; Maher, A. Surface waves in evaluation of damping in layered systems. In Proceedings of the 4th International Conference on Recent Advances in Geotechnical Earthquake Engineering and Soil Dynamics, Los Angeles, CA, USA, 26–31 March 2001. [Google Scholar]
- Crice, D. MASW, the wave of the future editorial. J. Environ. Eng. Geophys. 2005, 10, 77–79. [Google Scholar] [CrossRef]
- Shirley, D.J.; Hampton, L.D. Shear-wave measurements in laboratory sediments. J. Acoust. Soc. Am. 1978, 63, 607–613. [Google Scholar] [CrossRef]
- Lee, C.; Lee, J.S.; Lee, W.; Cho, T.H. Experiment setup for shear wave and electrical resistance measurements in an oedometer. Geotech. Test. J. 2008, 31, 149–156. [Google Scholar]
- Lee, J.S.; Park, G.; Byun, Y.H.; Lee, C. Modified fixed wall oedometer when considering stress dependence of elastic wave velocities. Sensors 2020, 20, 6291. [Google Scholar] [CrossRef] [PubMed]
- Byun, Y.H.; Tran, M.K.; Truong, Q.H.; Lee, J.S. Geophysical characterization of shear zone in direct shear test. In Proceedings of the Fifth International Symposium on Deformation Characteristics of Geomaterials, Seoul, Korea, 1–3 September 2011. [Google Scholar]
- Byun, Y.H.; Tran, M.K.; Yun, T.S.; Lee, J.S. Strength and stiffness characteristics of unsaturated hydrophobic granular media. Geotech. Test. J. 2012, 35, 193–200. [Google Scholar]
- Truong, Q.H.; Eom, Y.H.; Byun, Y.H.; Lee, J.S. Characteristics of elastic waves according to cementation of dissolved salt. Vadose Zone J. 2010, 9, 662–669. [Google Scholar] [CrossRef]
- Byun, Y.H.; Han, W.; Tutumluer, E.; Lee, J.S. Elastic wave characterization of controlled low-strength material using embedded piezoelectric transducers. Constr. Build. Mater. 2016, 127, 210–219. [Google Scholar] [CrossRef]
- Lee, J.S.; Lee, C.; Yoon, H.K.; Lee, W. Penetration type field velocity probe for soft soils. J. Geotech. Geoenviron. Eng. 2010, 136, 199–206. [Google Scholar] [CrossRef]
- Byun, Y.H.; Tutumluer, E. Bender elements successfully quantified stiffness enhancement provided by geogrid–aggregate interlock. Transp. Res. Rec. 2017, 2656, 31–39. [Google Scholar] [CrossRef]
- Byun, Y.H.; Qamhia, I.I.A.; Feng, B.; Tutumluer, E. Embedded shear wave transducer for estimating stress and modulus of As-constructed unbound aggregate base layer. Constr. Build. Mater. 2018, 183, 465–471. [Google Scholar] [CrossRef]
- Byun, Y.H.; Tutumluer, E.; Feng, B.; Kim, J.H.; Wayne, M.H. Horizontal stiffness evaluation of geogrid-stabilized aggregate using shear wave transducers. Geotext. Geomembr. 2019, 47, 177–186. [Google Scholar] [CrossRef]
- Byun, Y.H.; Tutumluer, E. Local stiffness characteristic of geogrid-stabilized aggregate in relation to accumulated permanent deformation behavior. Geotext. Geomembr. 2019, 47, 402–407. [Google Scholar] [CrossRef]
- Dong, Y.; Lu, N. Dependencies of shear wave velocity and shear modulus of soil on saturation. J. Eng. Mech. 2016, 142, 04016083. [Google Scholar] [CrossRef]
- Ogino, T.; Kawaguchi, T.; Yamashita, S.; Kawajiri, S. Measurement deviations for shear wave velocity of bender element test using time domain, cross-correlation, and frequency domain approaches. Soils Found. 2015, 55, 329–342. [Google Scholar] [CrossRef]
- Ismail, M.A.; Rammah, K.I. Shear-plate transducers as a possible alternative to bender elements for measuring Gmax. Géotechnique 2005, 55, 403–407. [Google Scholar] [CrossRef]
- Bertin, M.J.F.; Plummer, A.R.; Bowen, C.R.; Johnston, D.N. An investigation of piezoelectric ring benders and their potential for actuating servo valves. In Proceedings of the ASME/BATH 2014 Symposium on Fluid Power and Motion Control, Bath, UK, 10–12 September 2014; ASME International: New York, NY, USA, 2014. [Google Scholar]
- Montoya, B.M.; Gerhard, R.; DeJong, J.T.; Wilson, D.W.; Weil, M.H.; Martinez, B.C.; Pederson, L. Fabrication, operation, and health monitoring of bender elements for aggressive environments. Geotech. Test. J. 2012, 35, 728–742. [Google Scholar] [CrossRef]
- Byun, Y.H.; Kim, D.J. In-situ modulus detector for subgrade characterization. Int. J. Pavement Eng. 2020, 1–11. [Google Scholar] [CrossRef]
- Lee, P.Y.; Suedkamp, R.J. Characteristics of irregularly shaped compaction curves of soils. Highw. Res. Rec. 1972, 381, 1–9. [Google Scholar]
- ASTM D1557. Standard Test Method for Laboratory Compaction Characteristics of Soil Using Modified Effort; ASTM International: West Conshohocken, PA, USA, 1 May 2012. [Google Scholar]
- ASTM D2216. Standard Test Methods for Laboratory Determination of Water (Moisture) Content of Soil and Rock by Mass; ASTM International: West Conshohocken, PA, USA, 1 March 2019. [Google Scholar]
- Ahn, C.H.; Kim, D.J.; Byun, Y.H. Expansion-induced crack propagation in rocks monitored by using piezoelectric transducers. Sensors 2020, 20, 6054. [Google Scholar] [CrossRef] [PubMed]
- Subramanian, S.; Khan, Q.; Ku, T. Effect of sand on the stiffness characteristics of cement-stabilized clay. Constr. Build. Mater. 2020, 264, 120192. [Google Scholar] [CrossRef]
- Lee, J.S.; Santamarina, J.C. Discussion “Measuring shear wave velocity using bender elements” by Leong, E.C., Yeo, S.H., and Rahardjo, H. Geotech. Test. J. 2006, 29, 439–441. [Google Scholar]
- Indraratna, B.; Heitor, A.; Rujikiatkamjorn, C. Effect of compaction energy on shear wave velocity of dynamically compacted silty sand soil. In Proceedings of the 5th Asia-Pacific Conference on Unsaturated Soils, Pattaya, Thailand, 14–16 November 2011. [Google Scholar]
- Heitor, A.; Indraratna, B.; Rujikiatkamjorn, C. Use of the Soil Modulus for Compaction Control of Compacted Soils. In Proceedings of the International Conference on Ground Improvement & Ground Control, Wollongong, Australia, 30 October–2 November 2012. [Google Scholar]
- Burns, S.E.; Mayne, P.W. Small- and high-strain measurements of in situ soil properties using the seismic cone penetrometer (1548). Transp. Res. Rec. 1996, 1548, 81–88. [Google Scholar] [CrossRef]
- Mayne, P.W. Stress–strain-strength-flow parameters from enhanced in-situ tests. In Proceedings of the International Conference on In Situ Measurement of Soil Properties and Case Histories, Bali, Indonesia, 21–24 May 2001; pp. 27–47. [Google Scholar]
- Moon, S.W.; Ku, T. Development of global correlation models between in situ stress-normalized shear wave velocity and soil unit weight for plastic soils. Can. Geotech. J. 2016, 53, 1600–1611. [Google Scholar] [CrossRef]
- Heitor, A.; Indraratna, B.; Rujikiatkamjorn, C. Assessment of the post-compaction characteristics of a silty sand. Australian Geomech. J. 2014, 49, 125–131. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specific Gravity Gs | Grain Diameters to a Percent Passing [mm] | Gradation Coefficient Cc | Uniformity Coefficient Cu | Unified Soil Classification System | |||
|---|---|---|---|---|---|---|---|
| D10 | D30 | D50 | D60 | ||||
| 2.66 | 0.19 | 0.52 | 0.87 | 1.05 | 1.4 | 5.5 | SP |
| Dry Unit Weight [kN/m3] | 20.6 | 20.7 | 20.6 | 20.4 | 19.7 |
| Water Content [%] | 9.3 | 9.6 | 10.6 | 10.8 | 12.4 |
| α | β | R2 | |
|---|---|---|---|
| Ring Bender | 4 × 10−7 | 9.886 | 0.969 |
| Ultrasonic Transducer | 0.0115 | 4.773 | 0.537 |
| Bender Element | 2 × 10−5 | 7.956 | 0.804 |
| Entire System | 4 × 10−5 | 7.539 | 0.682 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, D.-J.; Yu, J.-D.; Byun, Y.-H. Piezoelectric Ring Bender for Characterization of Shear Waves in Compacted Sandy Soils. Sensors 2021, 21, 1226. https://doi.org/10.3390/s21041226
Kim D-J, Yu J-D, Byun Y-H. Piezoelectric Ring Bender for Characterization of Shear Waves in Compacted Sandy Soils. Sensors. 2021; 21(4):1226. https://doi.org/10.3390/s21041226
Chicago/Turabian StyleKim, Dong-Ju, Jung-Doung Yu, and Yong-Hoon Byun. 2021. "Piezoelectric Ring Bender for Characterization of Shear Waves in Compacted Sandy Soils" Sensors 21, no. 4: 1226. https://doi.org/10.3390/s21041226
APA StyleKim, D.-J., Yu, J.-D., & Byun, Y.-H. (2021). Piezoelectric Ring Bender for Characterization of Shear Waves in Compacted Sandy Soils. Sensors, 21(4), 1226. https://doi.org/10.3390/s21041226