1. Introduction
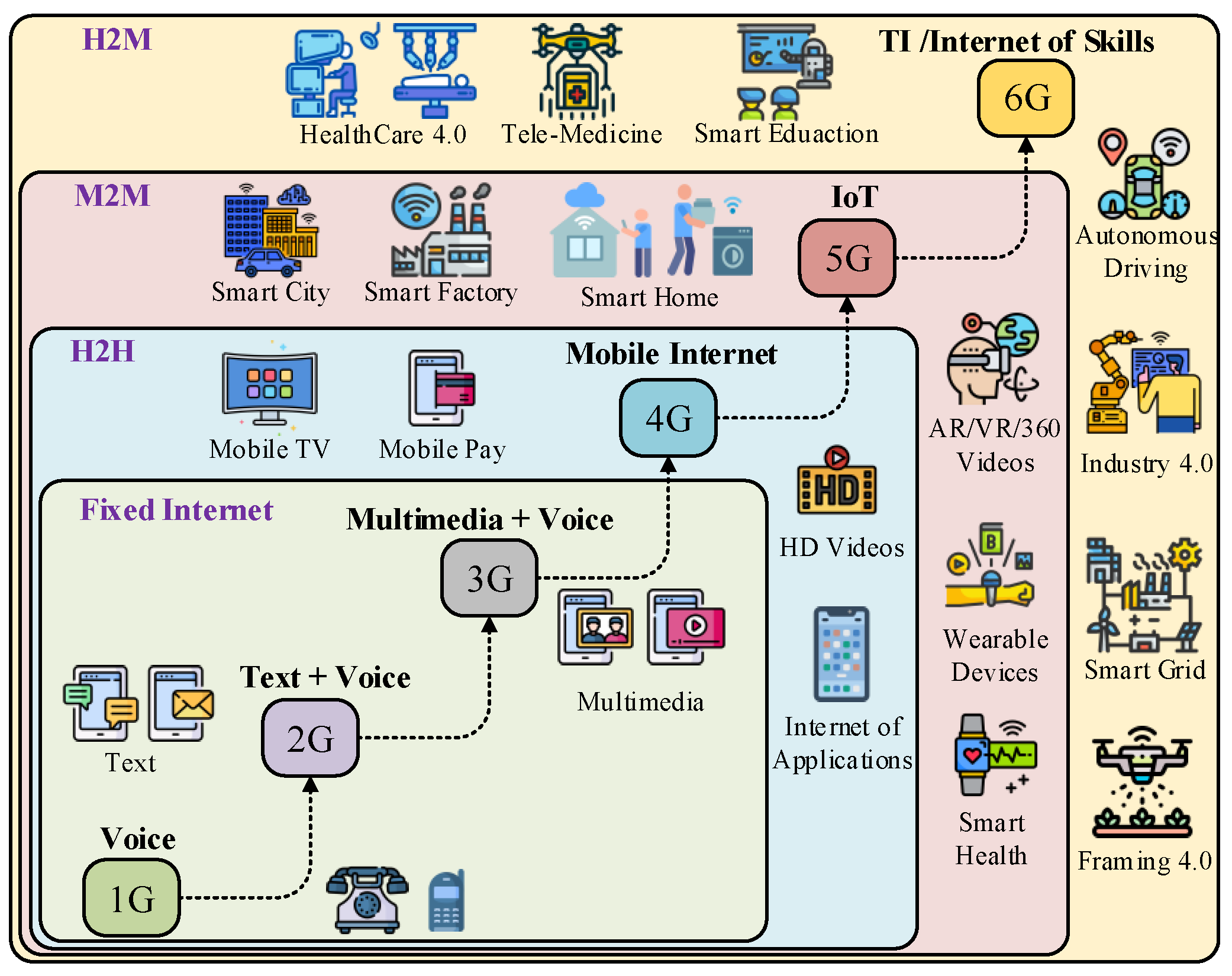
The rapid development of communication technologies from First-Generation (1G) to Sixth-Generation (6G) has gained enormous attention due to its emerging services like human-to-human (H2H), machine-to-machine (M2M), and human-to-machine (H2M) communication. These emerging services are induced by drivers like mobile Internet, Internet of Things (IoT), and tactile Internet (TI). The IoT envisions to fill the gap between the cyber and physical world [
1]. It is defined as to interrelate every existing computing object around us such as, mobile devices, sensors, and actuators, over the Internet. Moreover, IoT technology provides data sharing and communication in the M2M environment. Recently, the TI, with the aim to enable haptic communications, has shifted the IoT paradigm to real-time interaction between H2M and revolutionized the next-generation communication technologies [
2,
3]. The TI is envisioned to empower H2M communication where a human can interact with machines in a virtual and physical environment, while experiencing the haptic sensations (touch and forces) in addition to traditional audio-video data [
4].
Figure 1 depicts the technological evolution of the communication trends from 1G to 6G wireless communication.
Several international standard organizations, such as the international telecommunication union, the Third-Generation Partnership Project (3GPP), and the Institute of Electrical and Electronics Engineering (IEEE), are working to enable the existing and develop new network architectures to carry haptic data over the communication in real-time. The TI standard working group IEEE P1819.1 has already initiated and defined reference architecture, technical functions, and the definition of the TI [
5]. Moreover, it also described standard use cases of the TI and corresponding strict requirements, including teleoperation, automotive, immersive virtual/augmented reality, internet of drones, interpersonal communication, live haptic broadcast, and cooperative automated driving. However, these use cases demand near real-time connectivity (ultra-reliable and ultra-responsive) for M2M and H2M communication. This type of real-time connectivity is termed as ultra-reliable and low latency communication (URLLC). The URLLC is one of the key services of the Fifth-Generation (5G) networks, along with enhanced mobile broadband and massive machine-type communication. Moreover, 3GPP has introduced the 5G new radio to increase reliability and minimize end-to-end (E2E) communication latency for the URLLC services. In Release 15, 3GPP describes the URLLC requirement with the reliability of 99.9% for a single 32-byte packet under 1ms latency [
6]. Conclusively, 5G URLLC services are one of the potential enablers for the extreme requirements of the TI.
Moreover, these requirements become more critical for loss-intolerant and delay-sensitive TI industrial and medical applications. For example, remote industrial management and the automation of industrial robots (sensitivity of control circuits) demand latency between 0.25–10 ms with a packet loss of ≤
[
7]. Therefore, supporting next-generation industrial applications, including immersive reality, holographic, and haptic/tactile communication, demands a 5G network with new physical and upper layer techniques to guarantee quality of service (QoS) and quality of experience (QoE) provisioning. Furthermore, the 6G technology paradigm promises to break the 5G network limitations and enable them to virtualize human skills and transfer them from one place to another within 1ms through 6G native artificial intelligence (AI) network architecture. In-depth work on 5G URLLC services, beyond the 5G and 6G communication network, is presented in these articles [
8,
9,
10,
11,
12].
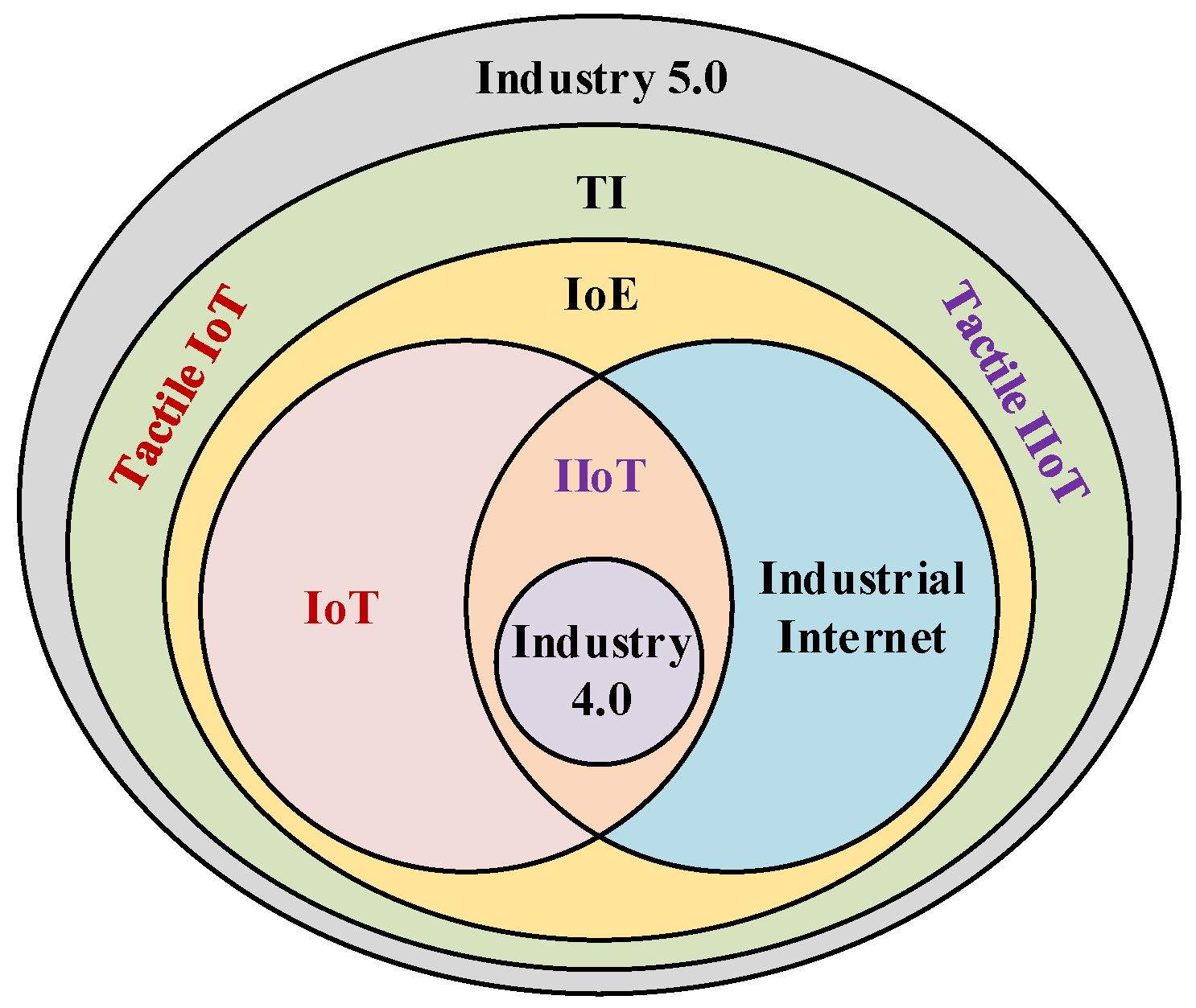
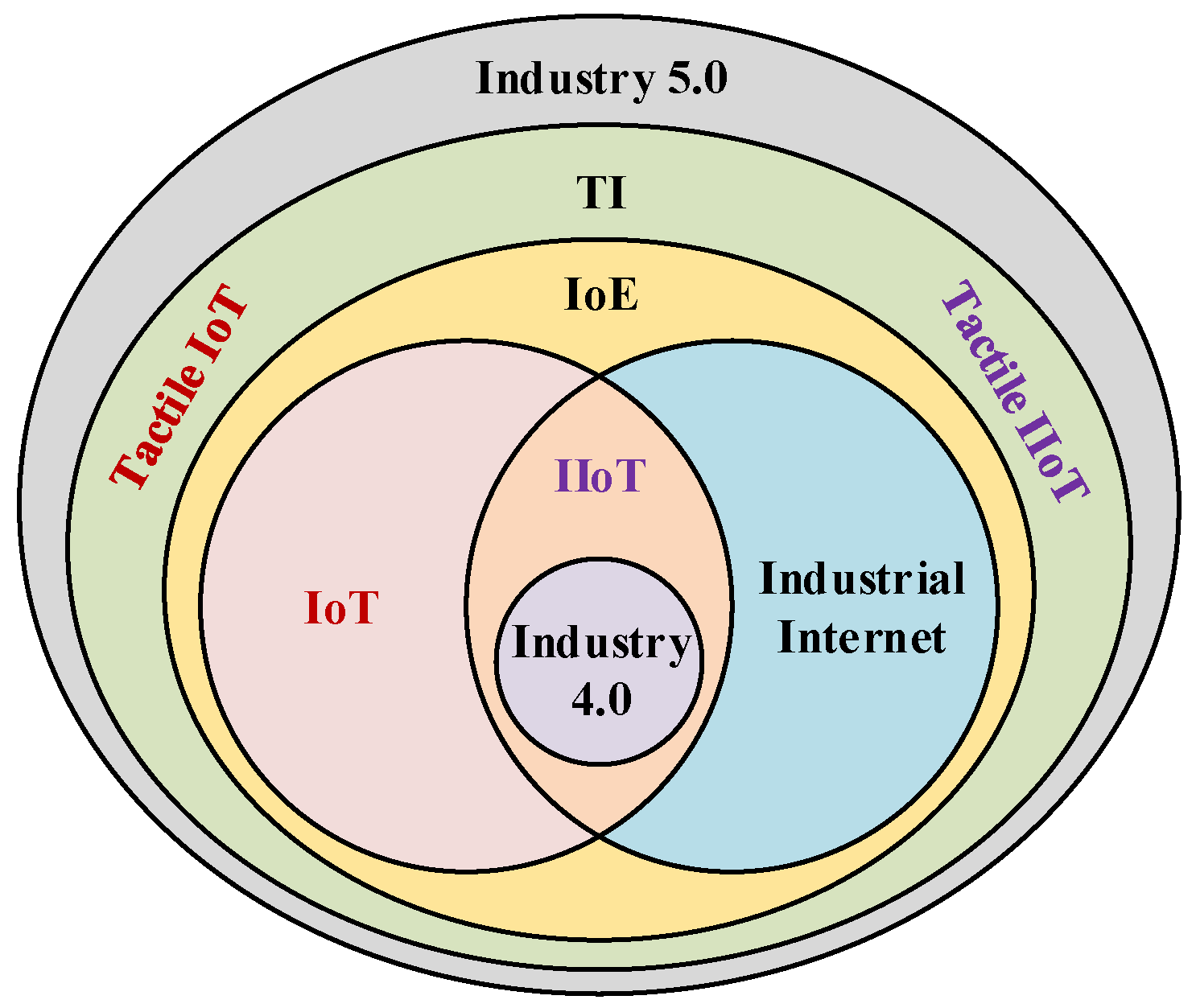
Table 1 compares the connectivity requirements of the traditional and emerging tactile IIoT applications (adapted from [
7]). The relationships between emerging technologies such as IoT, IIoT, Industrial Internet, Internet of Everything (IoE), TI, tactile IoT, tactile IIoT, Industry 4.0 and 5.0 are presented in
Figure 2.
An in-depth discussion on conventional and emerging industrial is presented in [
7], where the authors investigated the role of TI in the industrial environment, along with technical connectivity requirements of the TI industrial services. One of the vital use cases of the TI in the industrial domain is the bilateral/multilateral haptic-driven teleoperation systems. A teleoperation system consists of a human operator (master), teleoperator (slave), and a communication network that link the master to a slave domain, and enable the operator to interact with the teleoperator in the distant and inaccessible remote environment to perform complex tasks. The TI-based network provides bilateral communication to manage touch and actuation in real-time between the master and slave domain with a focus to ensure QoS and QoE requirements. Haptic-enabled teleoperation systems have numerous applications in Industry 4.0, such as robotic automation, smart manufacturing, smart logistic, the mining industry, food industry, healthcare industry, and industrial management (controlling and monitoring). Contrary to the traditional application, Haptic-enabled industrial applications demand high QoS and QoE, and depend on the nature of the application.
One of the effective ways to investigate the tactile IIoT application requirements, performance, and testing the new solutions to ensure QoS and QoE, is to set up a virtual testbed similar to the real network. The testbed must allow us to utilize and maintain hardware and software virtually on a standard computer without purchasing them. In the literature, several recent articles have proposed testbeds to overcome the above-mentioned challenges. The work in [
13] proposed a haptic system testbed to characterize and validate E2E haptic communication of different use cases of TI. The authors introduce a framework comprised of multiple sub-blocks that can be re-configured based on the nature of use cases, with a focus on minimizing cost and evaluation time. It also provides an option to integrate the testbed with the simulation platform through a connector interface to perform testing. Commonly, it is intended to offer an extensive range of haptic hardware, including sensors, actuators, and tactile interface boards. A testbed for tactile and kinesthetic data coding was proposed in [
14] aligned with IEEE P1918.1 TI standard working group to improve and standardize haptic codec. The proposed haptic coding testbed is considered as a reference testbed with the aim to develop optimal data compression schemes to exchange tactile and kinesthetic information and enable human-in-the-loop TI services. The authors also provide some reference tactile data traces, software, and hardware to evaluate newly developed kinesthetic and tactile codecs.
In [
15], a framework for tactile cyber physical systems was proposed, which is specifically for physical remote environments and based on network simulator NS3. It provides an interface for robotic experiments, along with haptic communication modules. However, the authors ignored the extensibility of the proposed testbed for other haptic-driven applications. Similarly, the authors in [
16,
17] proposed a generic testbed framework for different TI use cases. A data-driven experiment setup was proposed in [
16] to provide a common playground for testing haptic applications. The proposed haptic communication testbed at the Otto-von-Guericke University of Magdeburg (OVGU-HC) focused on providing experiment testbed for long-distance haptic-enabled teleoperation systems, in addition to small scale wireless haptic-driven applications. The OVGU-HC presents experiment automation and data collection utilizing experiment description language (DES-Cript). The proposed OVGU-HC did not work standalone, is a part of the MIoT-Lab, and is just used to gather hepatic experiment information. Moreover, it utilized domain-specific language DES-Cript [
18], and did not provide an open-source facility to the research and development community.
The study in [
17] presents a two-level classification of the TI applications based on controlled environment and master-slave integrations to develop a generic testbed, with a focus to ensure compatibility for all these classified applications, which is named as TI- eXtensible Testbed (XT). To demonstrate the potential of the TIXT, they discuss H2M haptic communication in the virtual and physical environment. However, they ignored the explanation on how to characterize the network impairments (delay, jitter, and packet losses) and investigate the performance of the haptic-driven IIoT application. Therefore, there is a strong need for a testbed that offers flexibility, scalability, open-source availability, tailored to examine network impairments, communication flow, and extensible for TI IIoT use cases. In this regard, we proposed a virtual testbed called IoTactileSim to investigate tactile IIoT services from QoS and QoE perspectives. The IoTactileSim employs Software Define Network (SDN) and edge computing at the core network to tactile industrial application. The following section presents the main contribution of the proposed IoTactileSim testbed.
1.1. Research Contributions
The primary contributions of this work are summarized below as:
We presented the details of TI in the context of various industrial environments and discussed some emerging applications of the tactile IIoT.
A hybrid virtual testbed, IoTactileSim, is proposed by combining a network emulator and an industrial robotic simulator to simulate tactile IIoT applications and investigate their performance.
We designed the IoTactileSim by adopting a hierarchical approach, where the network is divided into two parts; a core and an edge layer. The core layer consists of SDN routers to perform intelligent routing, while the edge layer performs as an intelligent support engine for tactile IIoT services.
The proposed IoTactileSim identifies the challenges imposed by the tactile IIoT and their strict QoS/QoE requirements. Moreover, it focuses on investigating the communication network parameters (latency, reliability) and other configurations corresponding to the identified requirements.
We conduct two different experiments in the tactile IIoT environment to evaluate the performance and present the potential of the proposed IoTactileSim testbed.
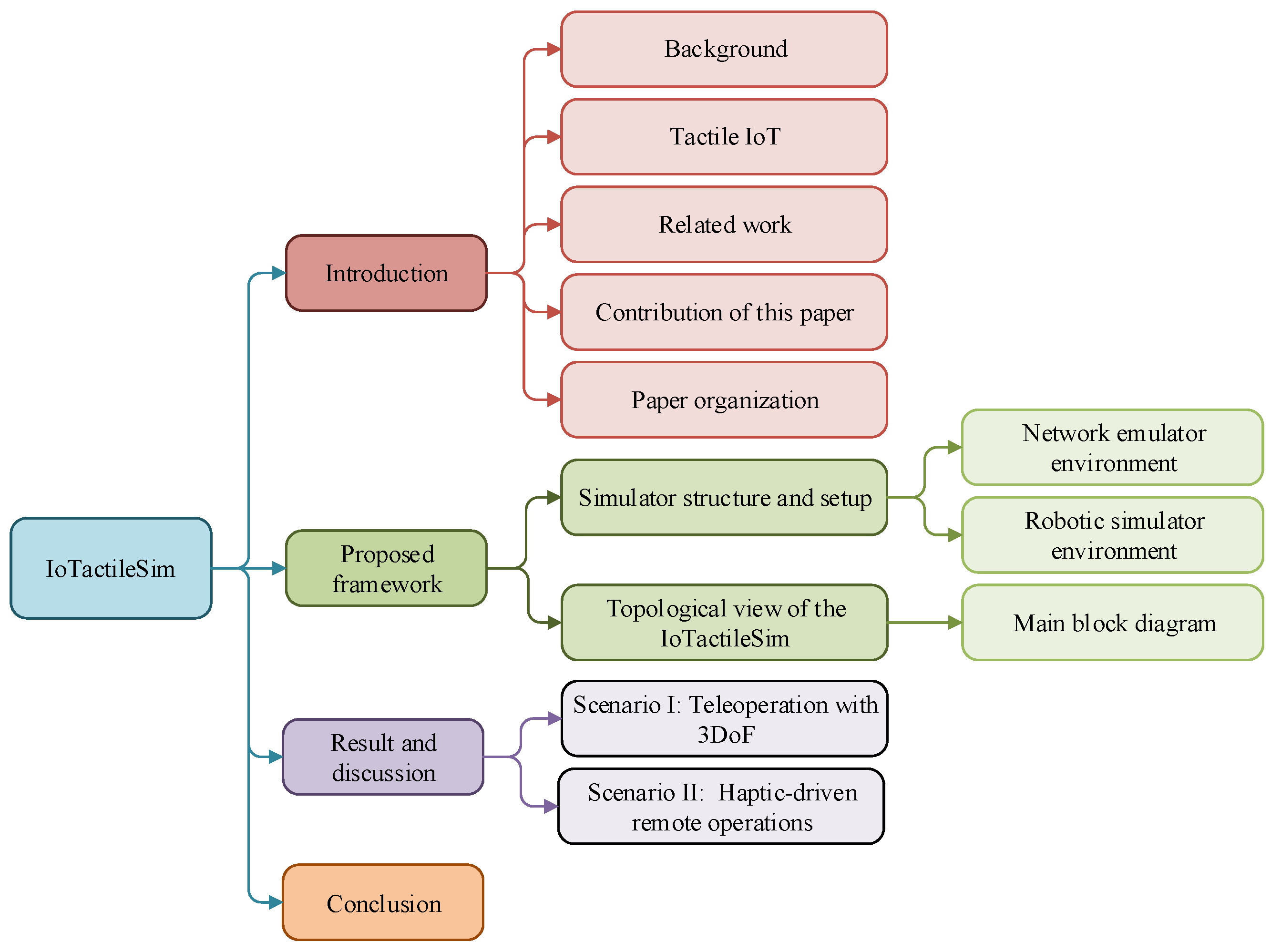
1.2. Paper Organization
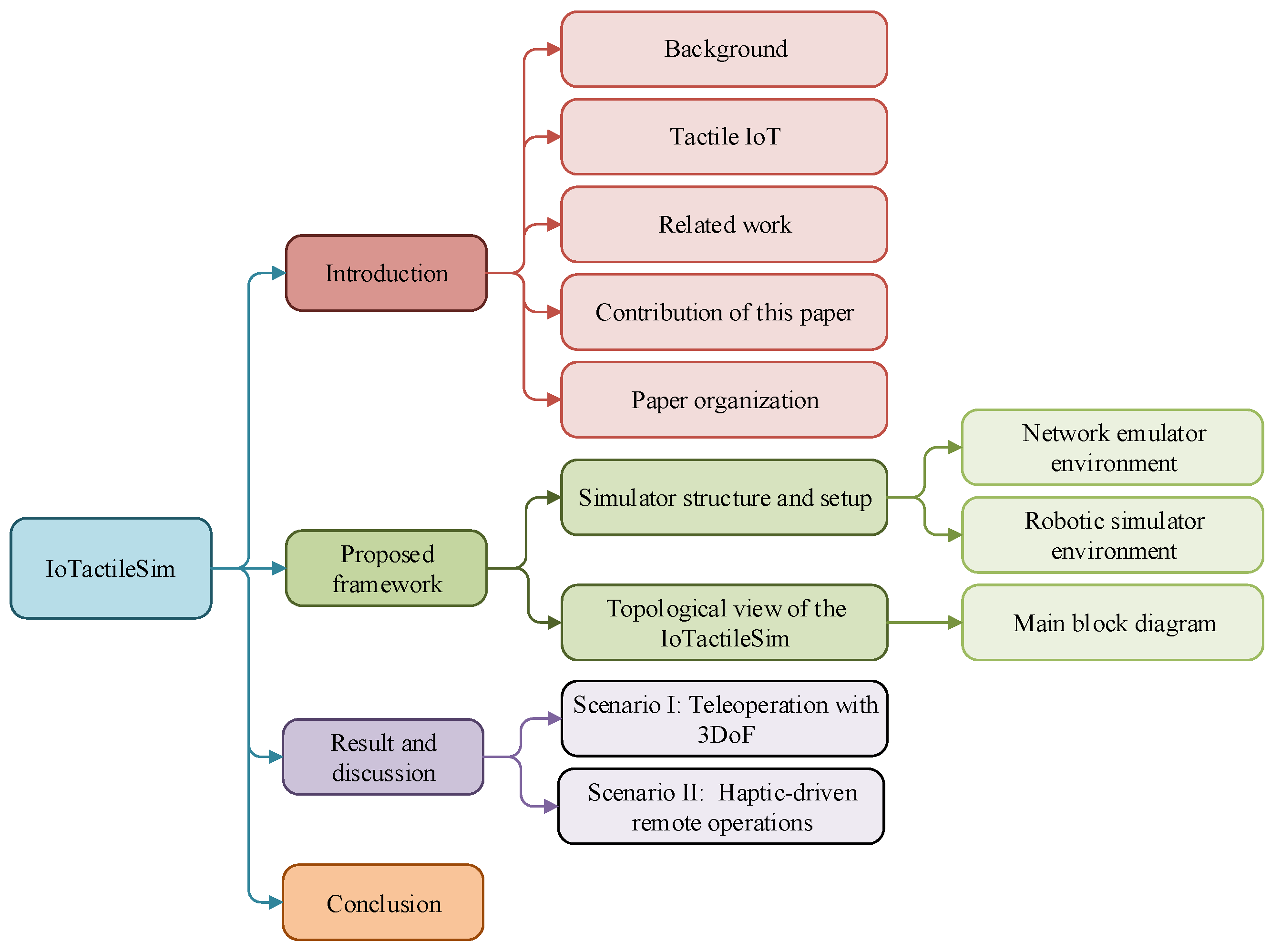
As illustrated in
Figure 3, the rest of this paper is organized as follows.
Section 2 discusses the proposed IoTactileSim structure and setup, along with the topological view.
Section 3 presents the scenarios and case studies to demonstrate the potential of the proposed testbed. Finally,
Section 3 concludes the paper and offers some future avenues.
2. Proposed Framework
In this section, we describe the proposed IoTactileSim testbed to support a broad range of tactile IIoT services. At first, we will present the network emulator to mimic the real-world communication network, followed by a detailed discussion on the industrial robotic simulator. Finally, we present the topologic view of the proposed simulator, along with the basic parametric settings.
2.1. Simulator Structure and Setup
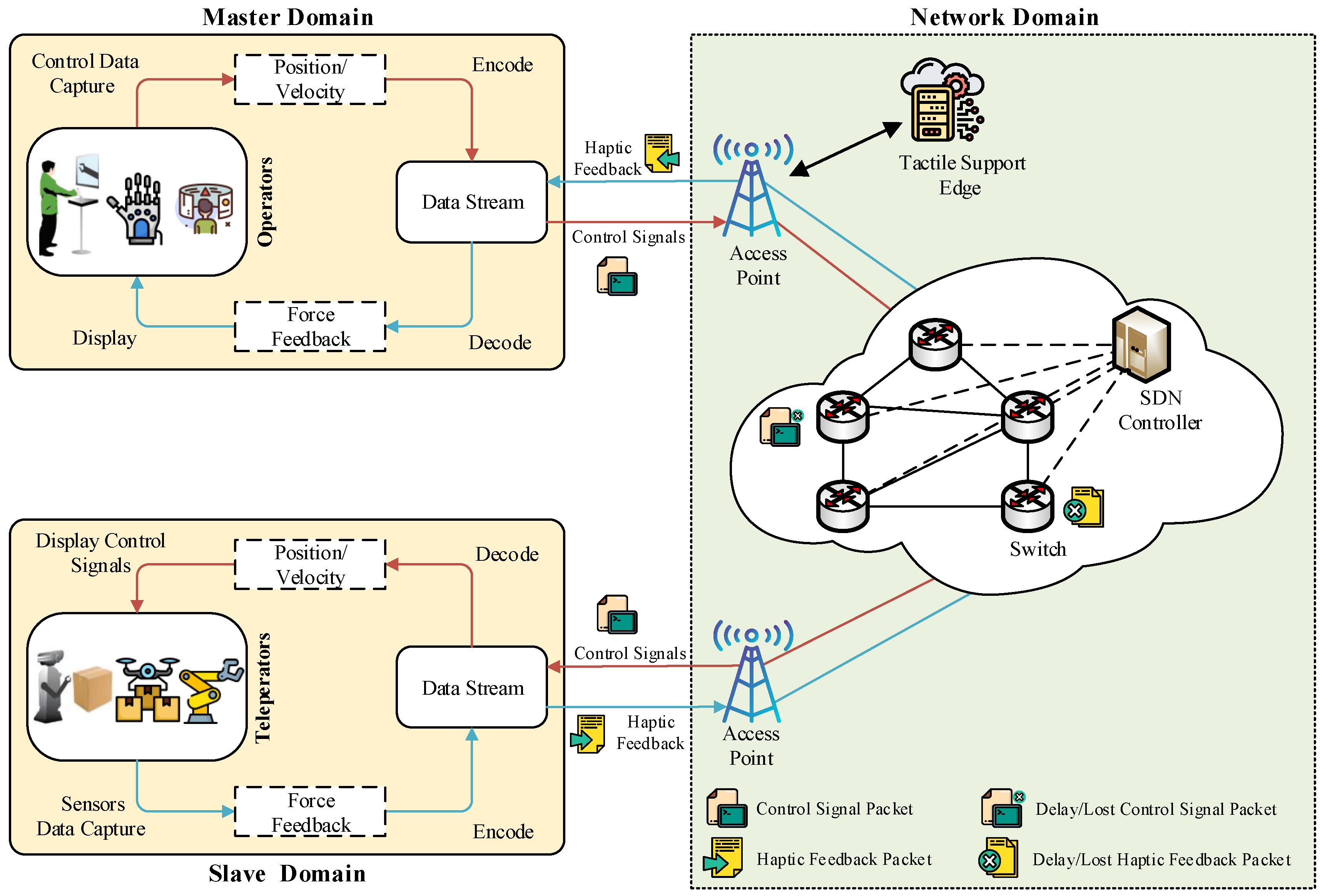
The structure of the proposed testbed IoTactileSim as depicted in
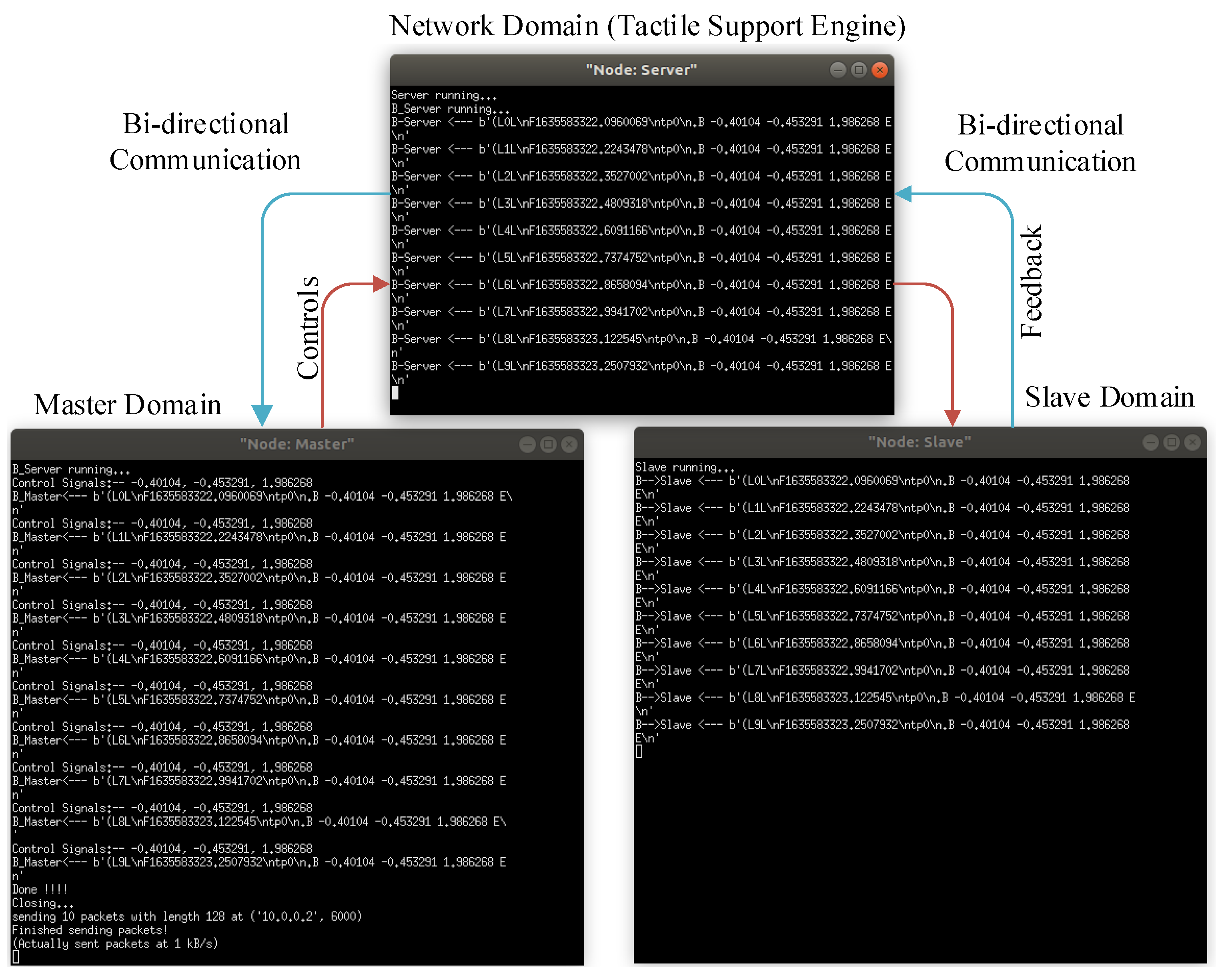
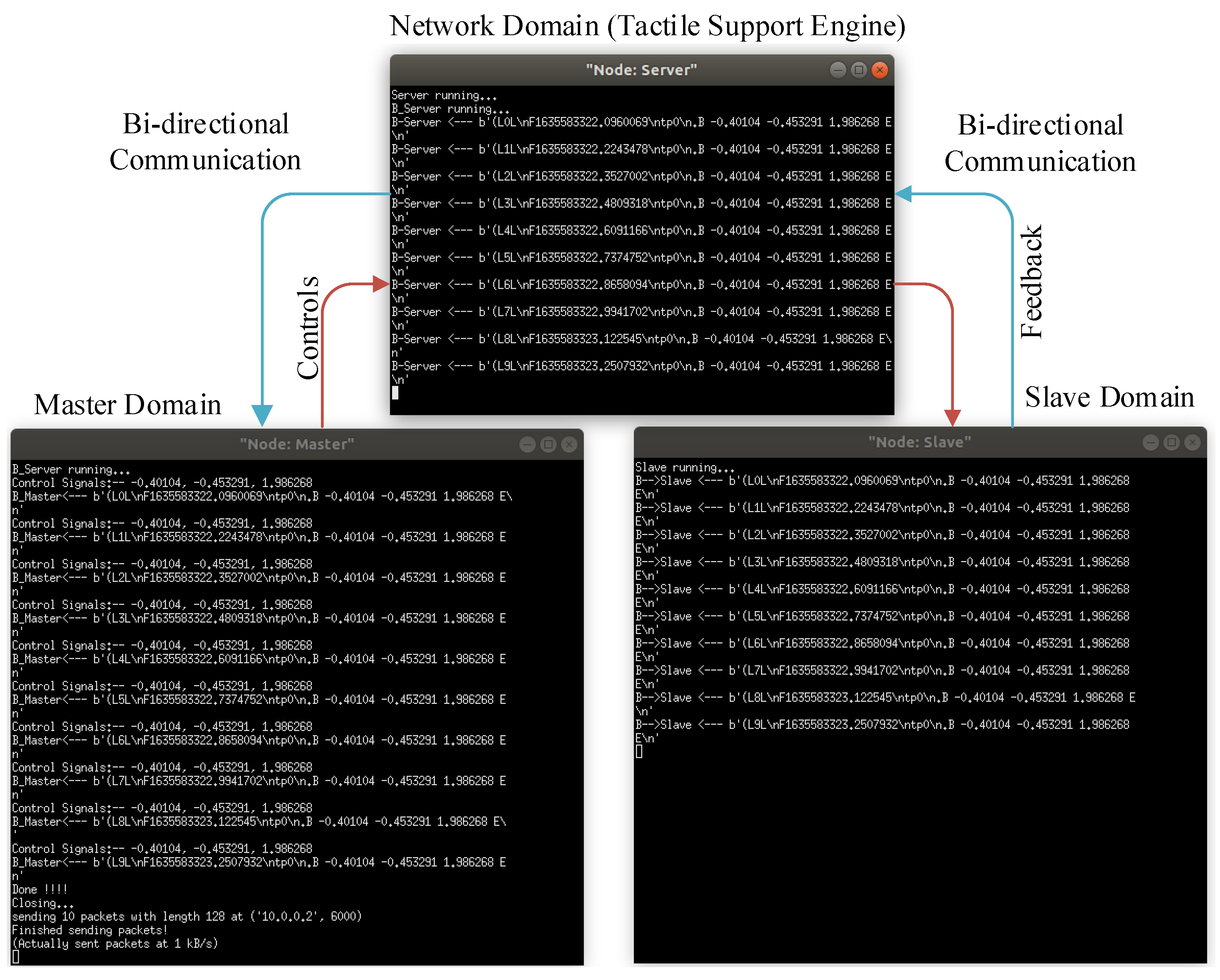
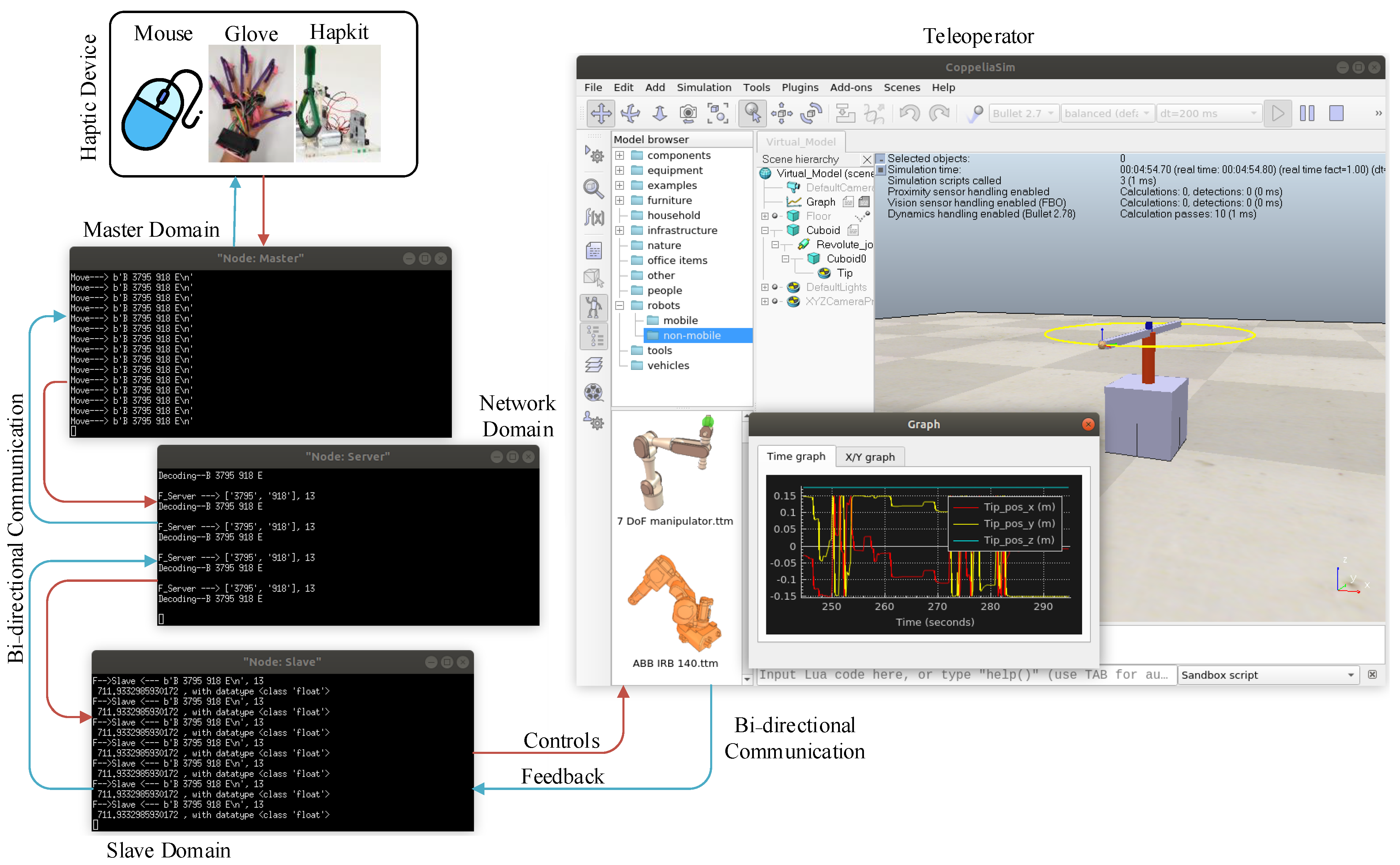
Figure 4, following the IEEE P1918.1 TI standard architecture. In general, the TI use cases are comprised of three key domains: master domain, network domain, and slave or controlled domain [
5]. The master domain consists of operators (human or control algorithms) that exploit haptic devices. The slave domain deals with the slave robots or teleoperators that the master side operator directly controls via control signals. The network domain connects the master and slave sides to enable bi-directional communication. To control the slave side teleoperator, the master side sends the control signal, and in return receives the feedback information including haptic and audio-visual signals. The master and slave domain creates a global control loop over communication network infrastructure. To maintain stability for the tactile IIoT services and provide a real-time haptic sensation to the users, this global control loop demands a haptic packet sampling rate of ≥1 kHz, a packet loss rate between
–
, and latency ranging from 1–10 ms. The proposed IoTactileSim helps the users to investigate these strict requirements and evaluate their newly developed strategies for emerging industrial applications.
2.1.1. Network Emulator Environment
As can be seen in
Figure 4, the control signal is captured through the controller on the master side and forwarded to the network domain in a specifically encoded format. SDN, network function virtualization (NFV), and mobile edge computing (MEC) are employed with 5G technology in the core network of the proposed testbed to overcome the 1 ms latency challenge and to provide support for the next-generation industrial applications [
19]. The network domain receives these packets and forwards them to the slave domain to perform the required task. The feedback in form of the haptic data is sent from the slave teleoperator to the master side human operator. The proposed IoTactileSim utilizes the Mininet emulator for the network design, resembling a real-world network operations and hardware in a virtual environment [
20]. Mininet employs process-level virtualization to develop a virtual communication network with virtual hosts and connects them via virtual Ethernet pairs.
The proposed IoTactileSim enables the evaluation of large custom topologies with actual application traffic traces by deploying them into the physical network. It also enables the utilization of emerging technologies such as SDN, NFV, and MEC. In the SDN framework, control planes are separated from the forward plane in the network. The emulator is written in python language and freely available at the Mininet official website (
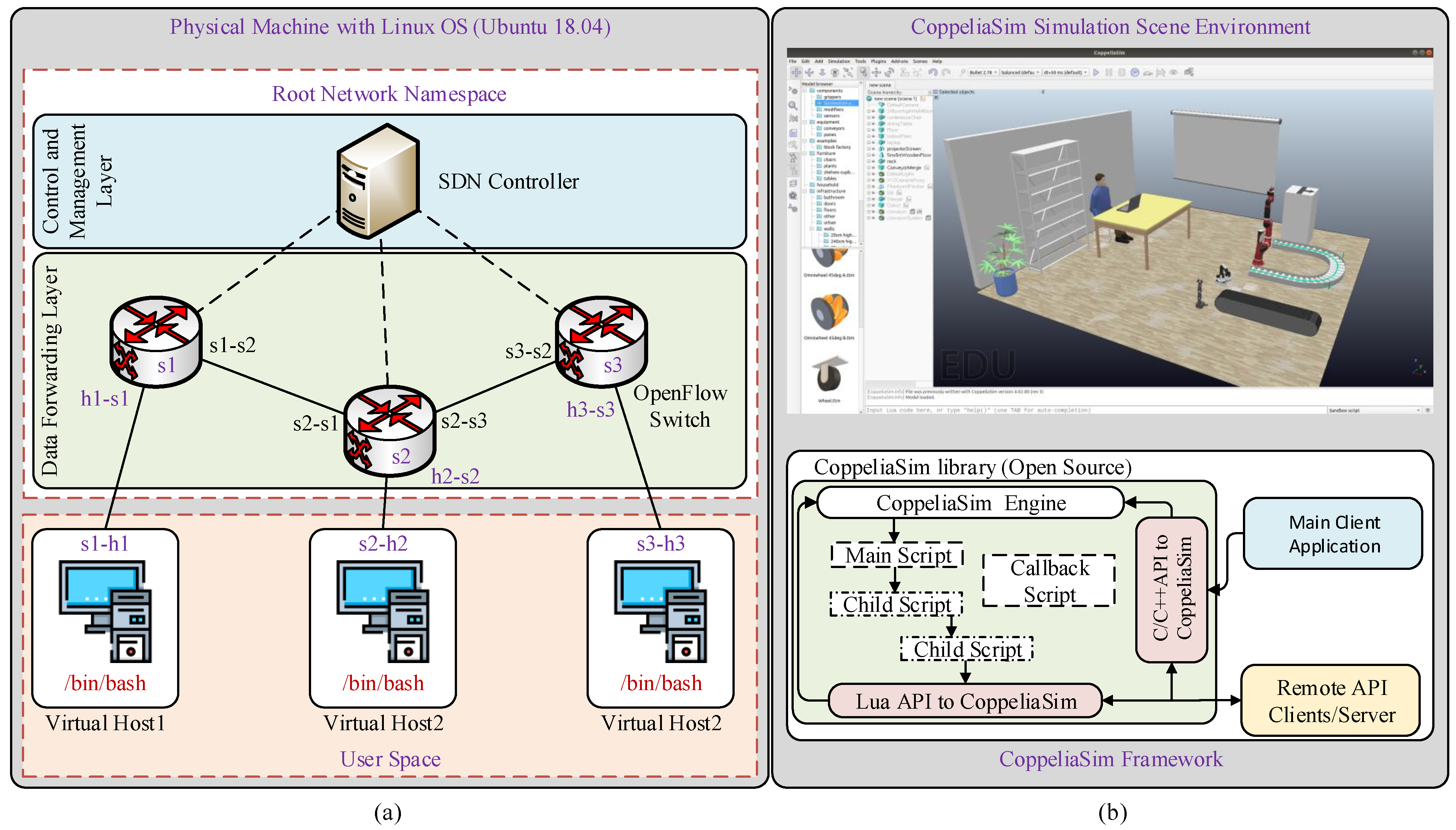
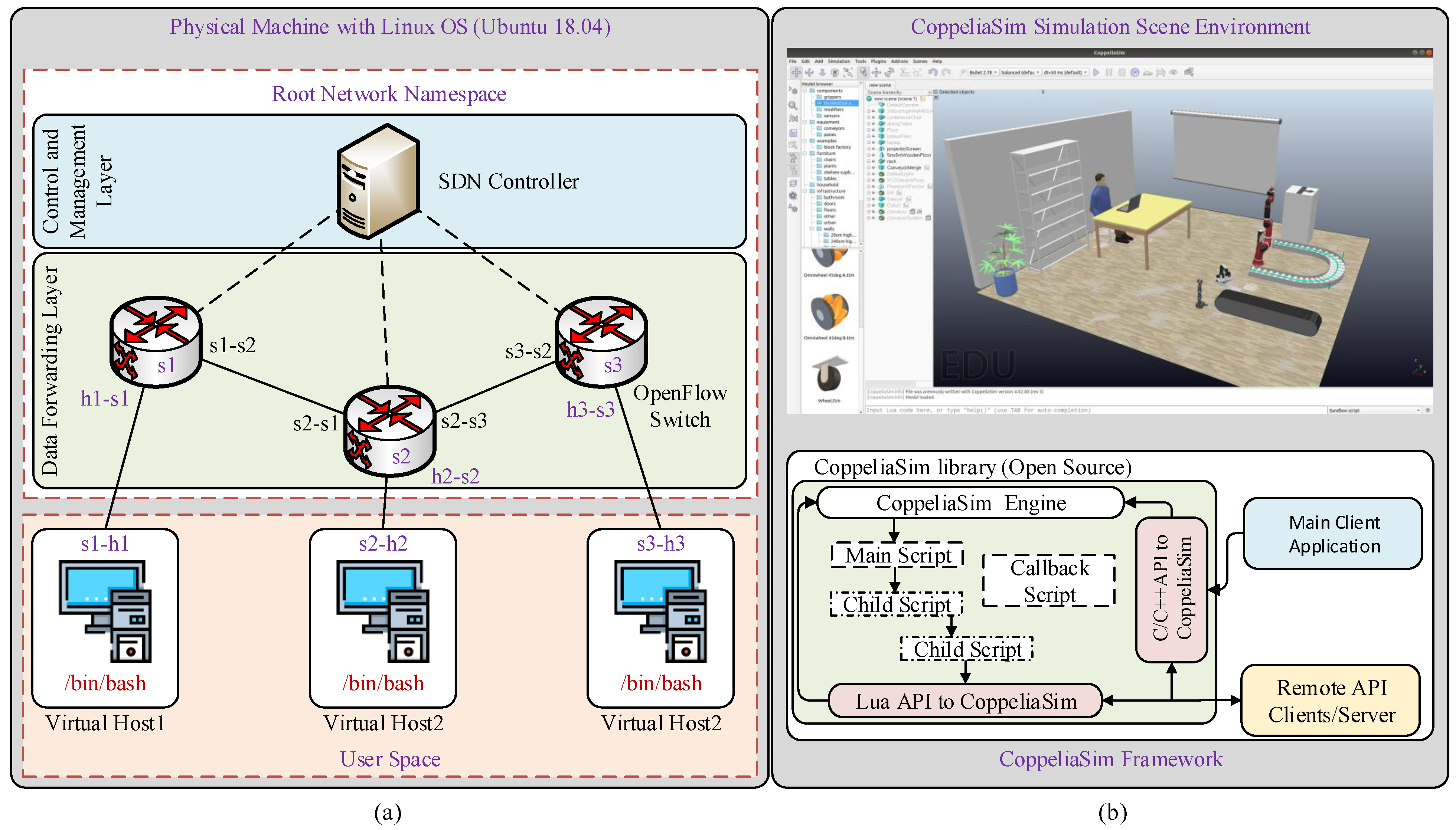
http://mininet.org/, accessed on 10 November 2021). An overview of the basic architecture of the Mininet with open-source virtual switches Open vSwitch (OVS) and SDN standard protocol OpenFlow is depicted in
Figure 5a. Mininet by itself is a network emulator that allows users to mimic real network topologies. It also enables users to build such network topologies in SDN architecture. This is what Mininet is capable of in a nutshell. It does not provide any support for integrating tactile Input/Output (I/O) modules or any other modules for that matter. It only provides us with a virtual environment where all network nodes are present (virtually) on a single physical device. The contribution of the IoTactileSim over Mininet is defined as:
IoTactileSim allows users to integrate several tactile I/O modules with the Mininet environment.
IoTactileSim enables users to implement each network module on a separate physical device.
IoTactileSim also has an embedded tactile support engine which is not present in Mininet. This support engine can be modified by the user based on their use cases.
2.1.2. Robotic Simulator Environment
To develop the smart industry with human-in-the-loop and human-robot interaction haptic-driven teleoperation use cases like remote maintenance, inspection, industrial management, we utilized one of the famous industrial robotic simulators CoppeliaSim. This industrial robotic simulators CoppeliaSim is formerly known as (V-REP: Virtual Robot Experimentation Platform) [
21]. The reason to use the CoppeliaSim is that it provides a range of emerging industrial applications, including factory automation, remote monitoring, safety monitoring, telerobotic operations, etc.
Figure 5b illustrates the basic control architecture and scene environment of the CoppeliaSim simulator. As can be seen from
Figure 5b, the simulation loop consists of the main and child script. The main script controls all child scripts attached to the specific object in the simulation environment. The remote Application Programming Interface (API) allows the user to interact with the simulator from outside the system through socket communication. The remote API client and server are responsible for providing these services through different programming languages like C/C++, Python, Matlab, Java, etc.
In the proposed IoTactileSim, we utilized the python remote API client to interact with the smart industrial application in the CoppeliaSim environment through socket communication. The control code of the developed IIoT applications is executed in the same computing machine where the network emulator was employed. The CoppeliaSim simulator is connected with a network to represent network-slave interaction that was designed utilizing Mininet. Additionally, the network is linked with the master domain and makes the master-network relationship. The overview of the connection between master, network, and slave domain using Mininet and CoppeliaSim in a single computing machine (personal computer) is illustrated in
Figure 6, and an in-depth discussion on each module is presented in the next section.
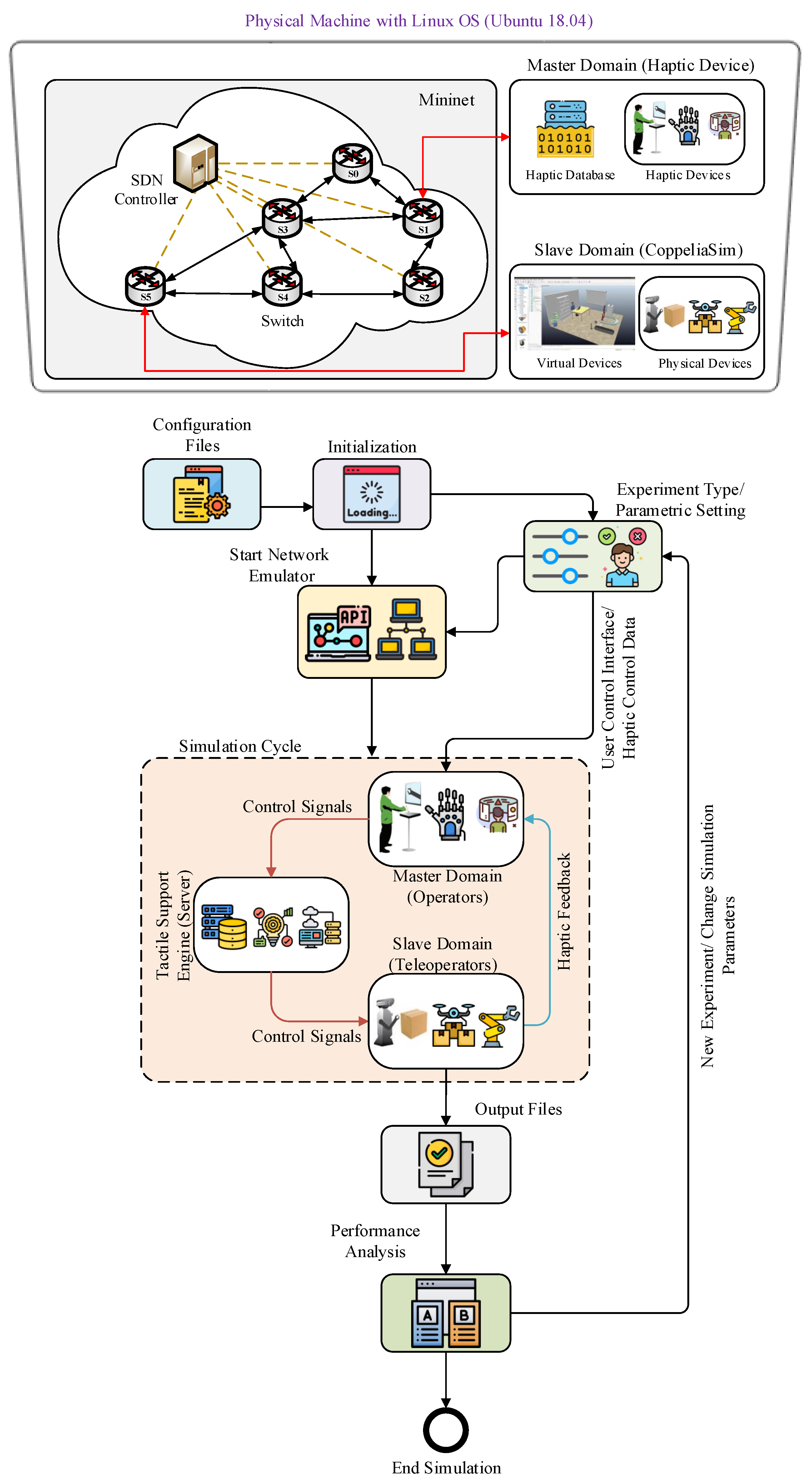
2.2. Topological View of the IoTactileSim
This section focuses on the architecture of the proposed IoTactileSim testbed as depicted in
Figure 6. At first, we discuss the parameter initialization, settings, and user interface to interact with the proposed testbed. Second, the topological view of the core network architecture is presented. Third, an in-depth discussion on application-agnostic design with the application and network connectivity is reported.
Initialization: In the initialization module, the simulator reads the parametric configuration files. It sets packet size, packet rate, Internet Protocol (IP) suite, IP address, link bandwidth, and link latencies. This module facilitates the users to provide the parameter settings as per their experiment need. If the user does not provide the parametric settings, then it automatically uses the default values of the parameters, as defined in
Table 2.
Start Network Emulator: In order to design a real-world network, a Mininet emulator creates a custom topology with five OVSs and three hosts. The hosts act as a standard computing machine and are responsible for the master domain, slave domain, and tactile support engine. The OVSs are connected with a single SDN controller. The SDN controller decides to handle the data plane and allows the network operator to control and manage the whole network via API provided by the Mininet. Therefore, we utilized the Mininet Python API in IoTactileSim, so that the users can change the network settings as per their experiment demands to evaluate their newly developed approaches. The users can change the parametric values from the configuration files as discussed earlier in the initialization step.
Simulation Cycle: After creating the network topology with three hosts that work as a master, slave, and tactile support engine, the simulator enters into the simulation cycle. In the simulation cycle, the actual experiments are performed as per defined conditions by the users through parametric settings or default values. The network host that acts as the master side, connects to the haptic device that the human operator uses to send the control signals to the salve side manipulator. The other host acting as a slave, connects to the CoppeliaSim simulator for executing the control commands in the designed virtual/physical tactile IIoT applications. After conducting a desired control experiment, the haptic feedback is sent to the human teleoperator at the master domain. This loop runs until the simulator reaches the defined threshold values like 1000 packets, etc. Finally, at the end of the simulation cycle, the simulator stores the experimental results into a file to investigate various network impairments.
Performance Analysis: This module receives the stored experimental data file and compiles result graphs to understand the strengths and weaknesses of the conducted experiments from the QoE and QoS perspectives. After representing the experimental result in the visual form, it stores these results, and enables the users to perform new experiments or to exit the simulator. The list of the default parameter values and settings used in the proposed IoTactileSim are summarized in
Table 2. The proposed IoTactileSim is publicly available at Github (
https://github.com/zubair1811/IoTactileSimV1.git, accessed on 30 November 2021) to the interested researchers to conduct extensive experiments to evaluate their suggested approaches.
4. Discussion and Future Work Directions
In our previous work [
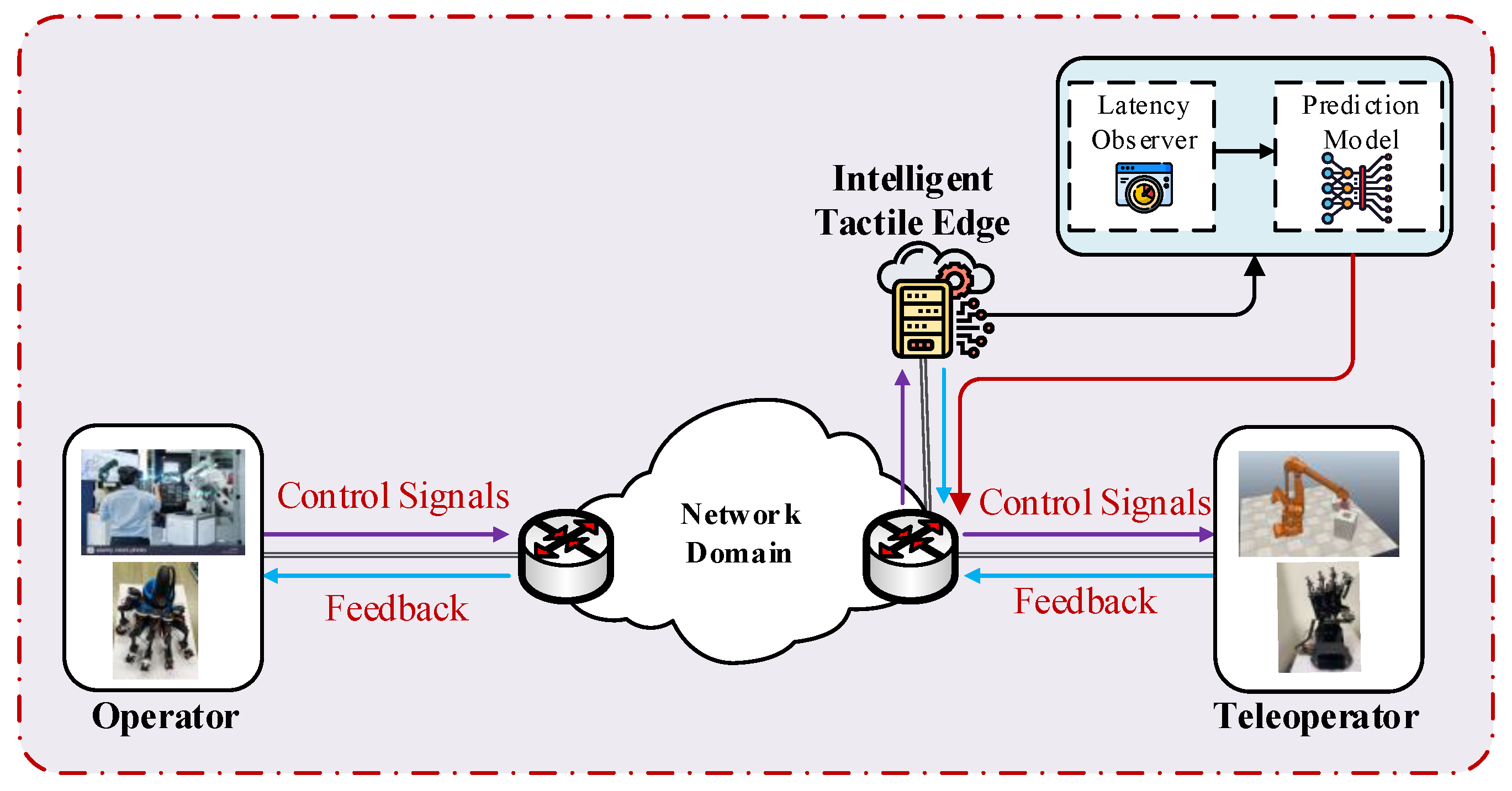
23], we analyzed the different haptic gloves and investigated how data processing increased the latency in the haptic communication loop and proposed a low-latency haptic open glove (LLHOG). Contrary to previous work, the focus of this paper is to provide network infrastructure to transmit haptic traffic between operator and teleoperator and simulate delay-sensitive and loss-intolerant tactile IIoT applications. However, there are various industry 4.0 applications under use cases class C, such as fleet management, tactile-driven logistics, cooperative robotics, and motion control, which demand higher QoS and QoE. To allow these real-time applications, the utilization of edge computing is required. Therefore, there is a need for edge-based network systems with native machine learning parts to provide the QoS and QoE requirement provisioning for these applications. In this regard, as a future, an edge-based ITE is developed as a tactile support engine to enable the ability for the user to train and deploy machine learning models at the edge to ensure QoS and QoE. The conceptual diagram to design and deploy the trained model on ITE is illustrated in
Figure 14.
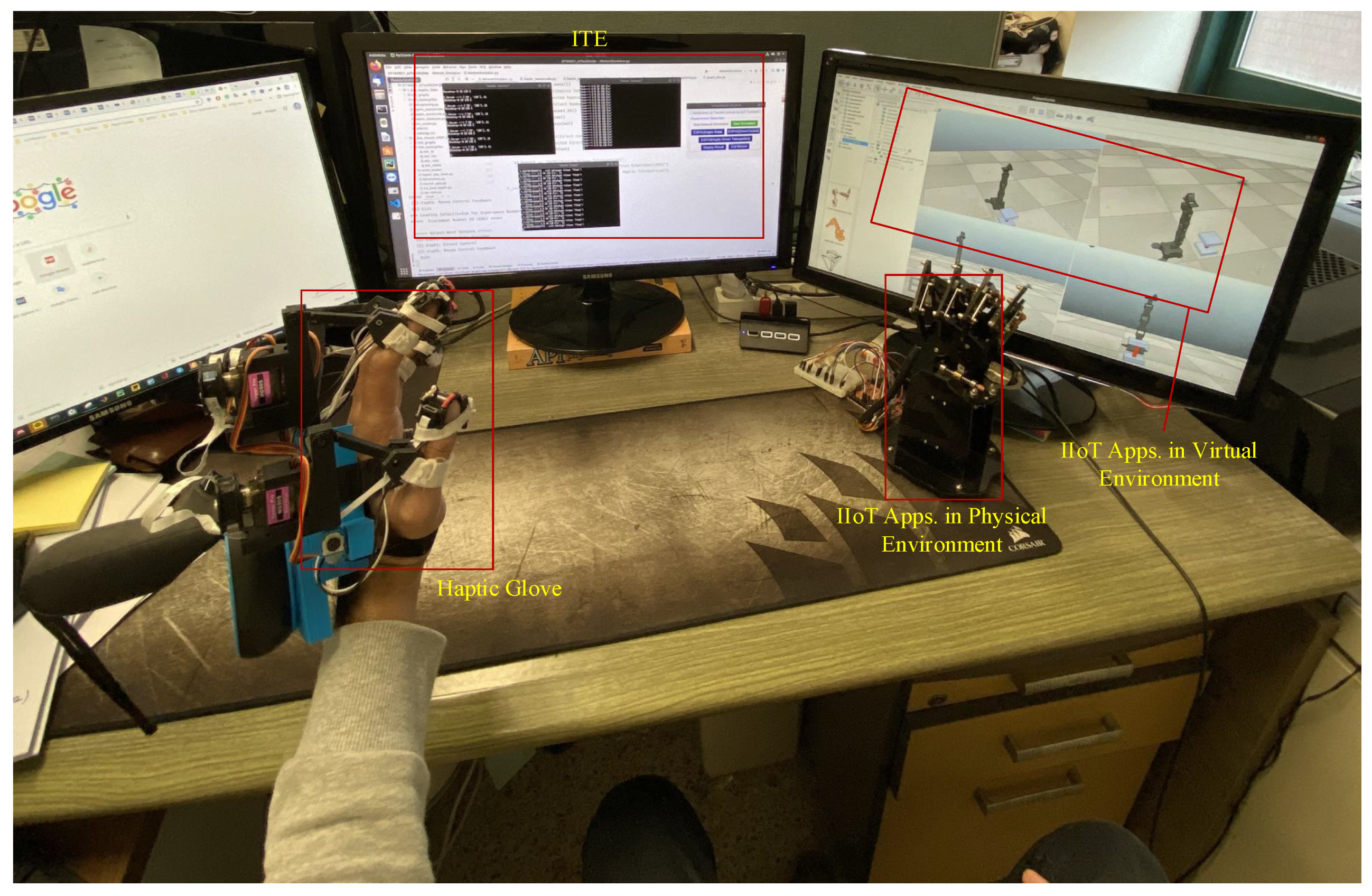
In future work, more practical challenges regarding tactile IIoT in the real-world scenario need to be considered. As discussed above, providing required QoS and QoE in the real-time complex industrial application is more challenging than simulation analysis. Therefore, we indented to test the proposed IoTactileSim in real-time physical IIoT scenarios and demonstrate the real-world experiment design overview in
Figure 15. On the master side, we utilized the LLHOG, which consists of the rotary position sensors with a min-max scaling filter to send haptic data. The bionic robot hand, which consists of Arduino and servo controllers, is used at the slave side. The specification, sample code, and documentation are available at the official website (
https://wiki.dfrobot.com/, accessed on 30 November 2021 ). The proposed IoTactileSim connects the LLHOG and bionic robot hand to develop a closed control loop. The ITE is also integrated with the proposed IoTactileSim to monitor the network dynamics and guarantee the QoS and QoE requirements for tactile IIoT applications.
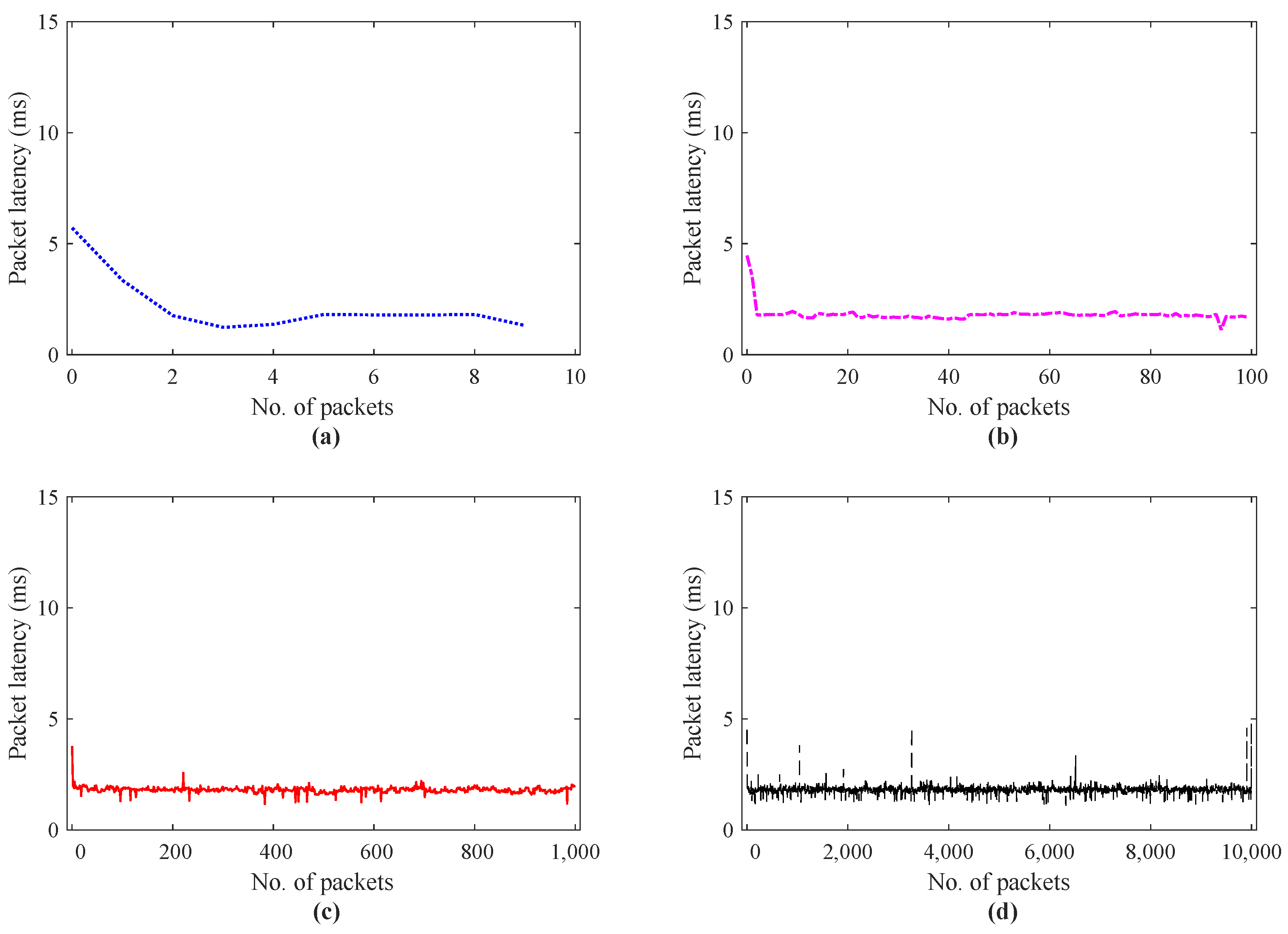
5. Conclusions
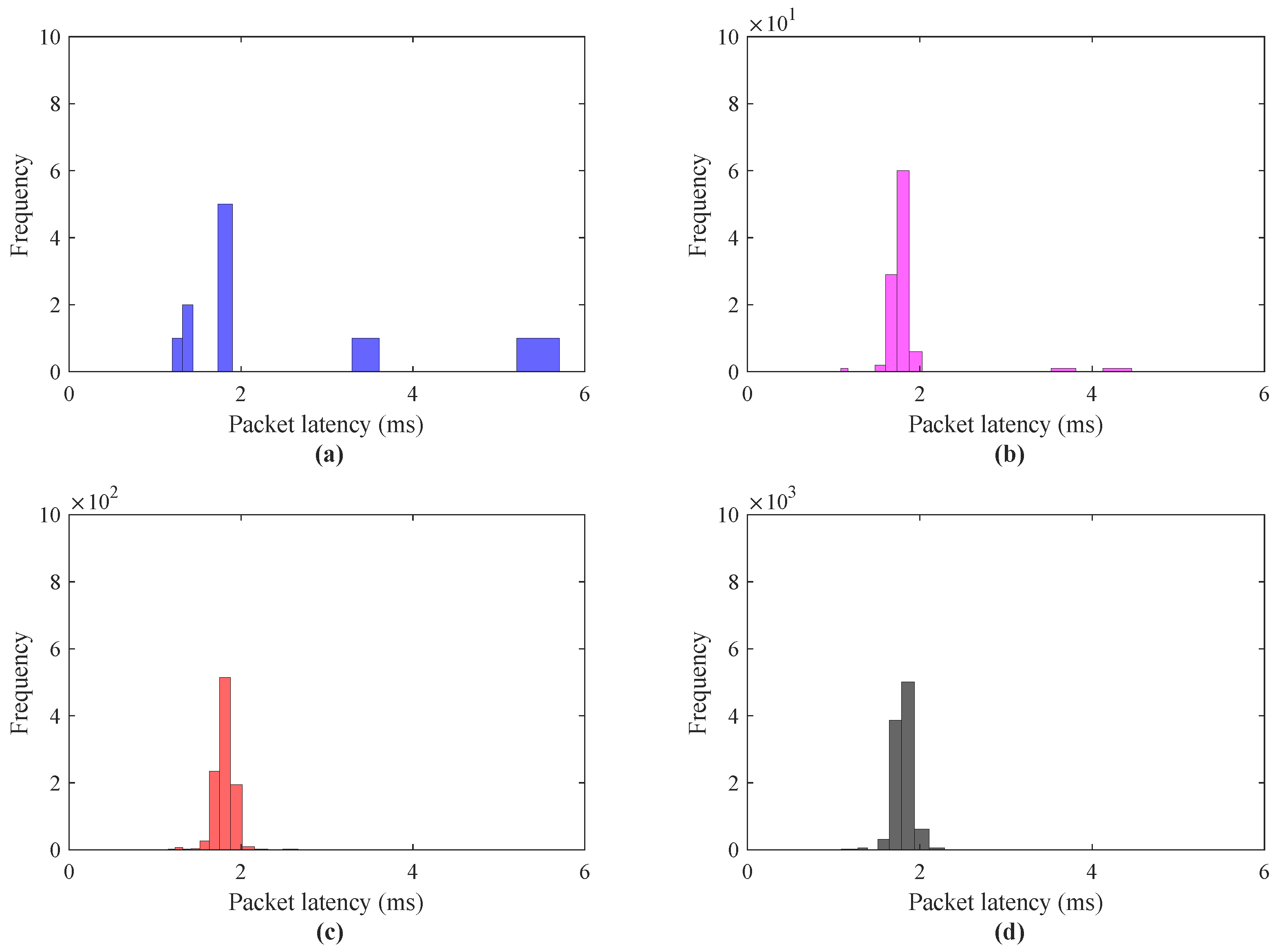
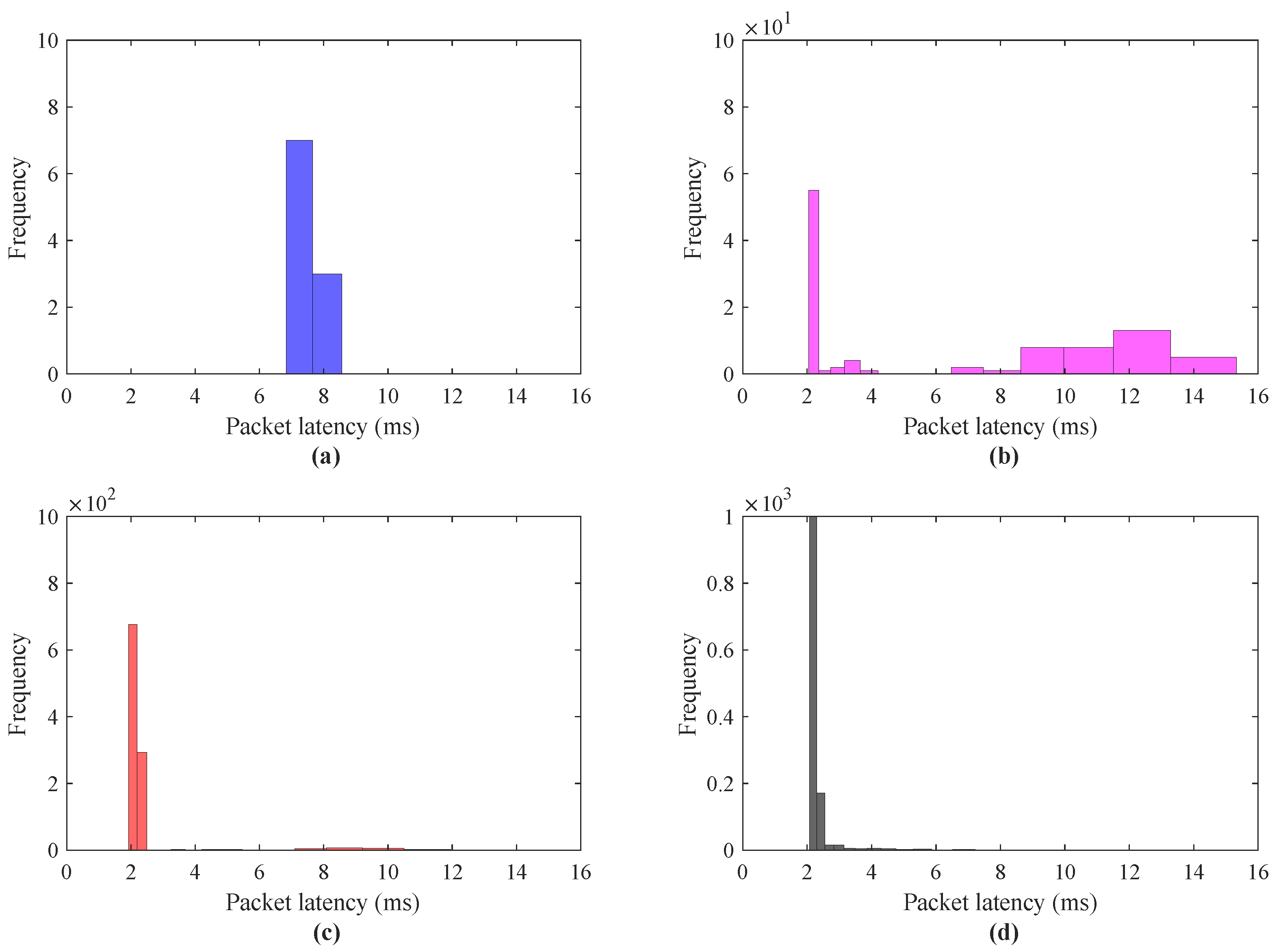
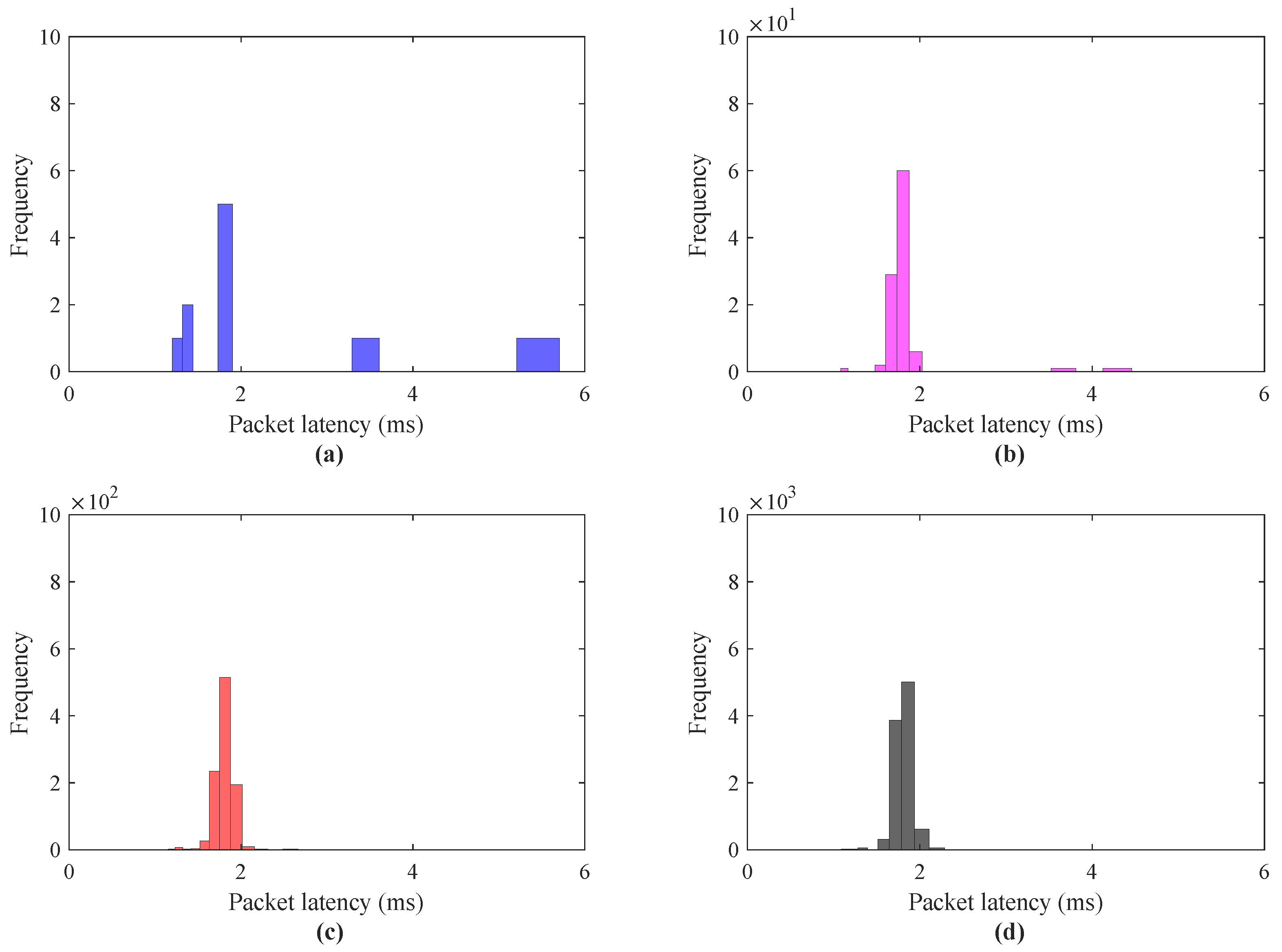
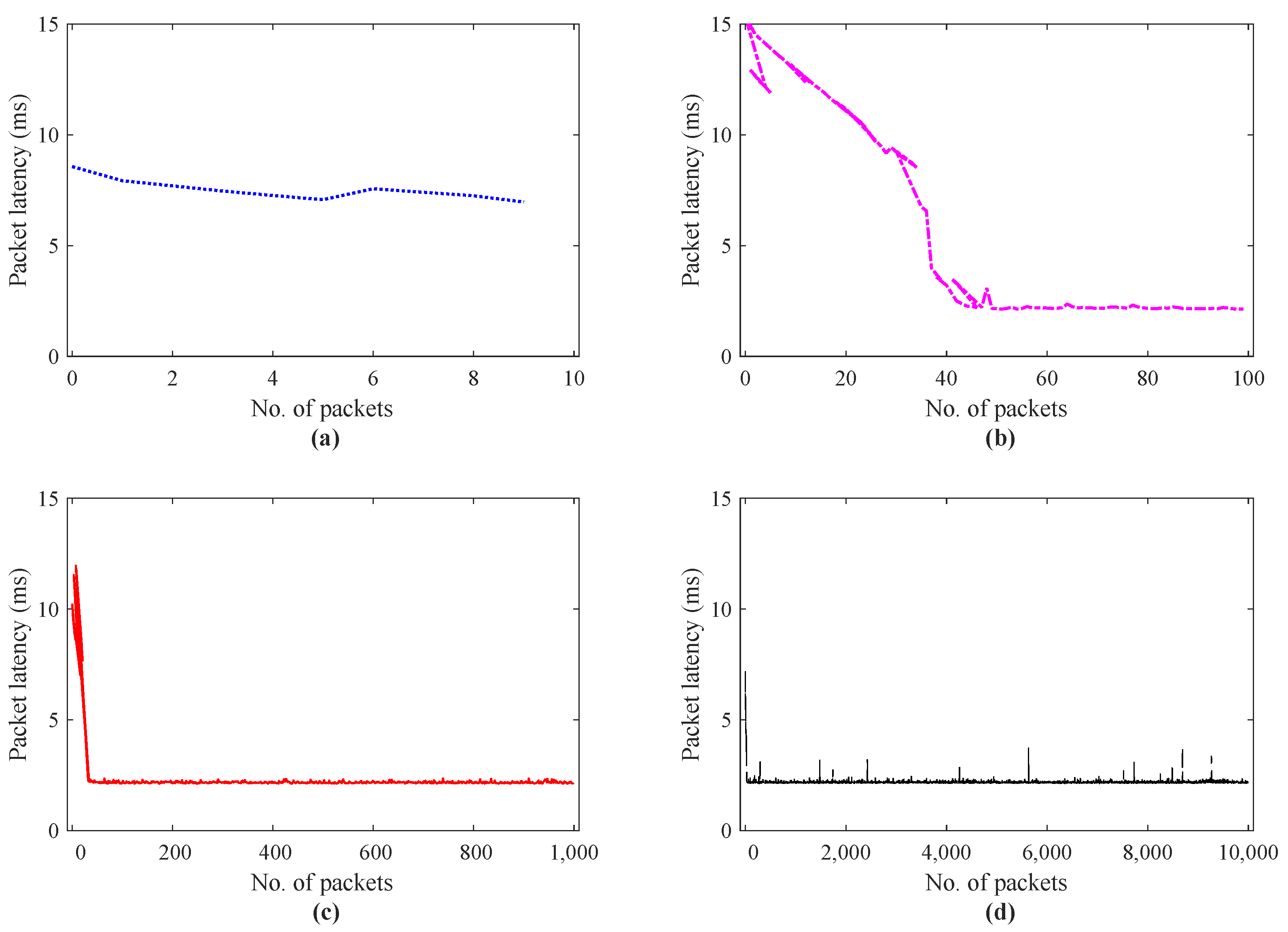
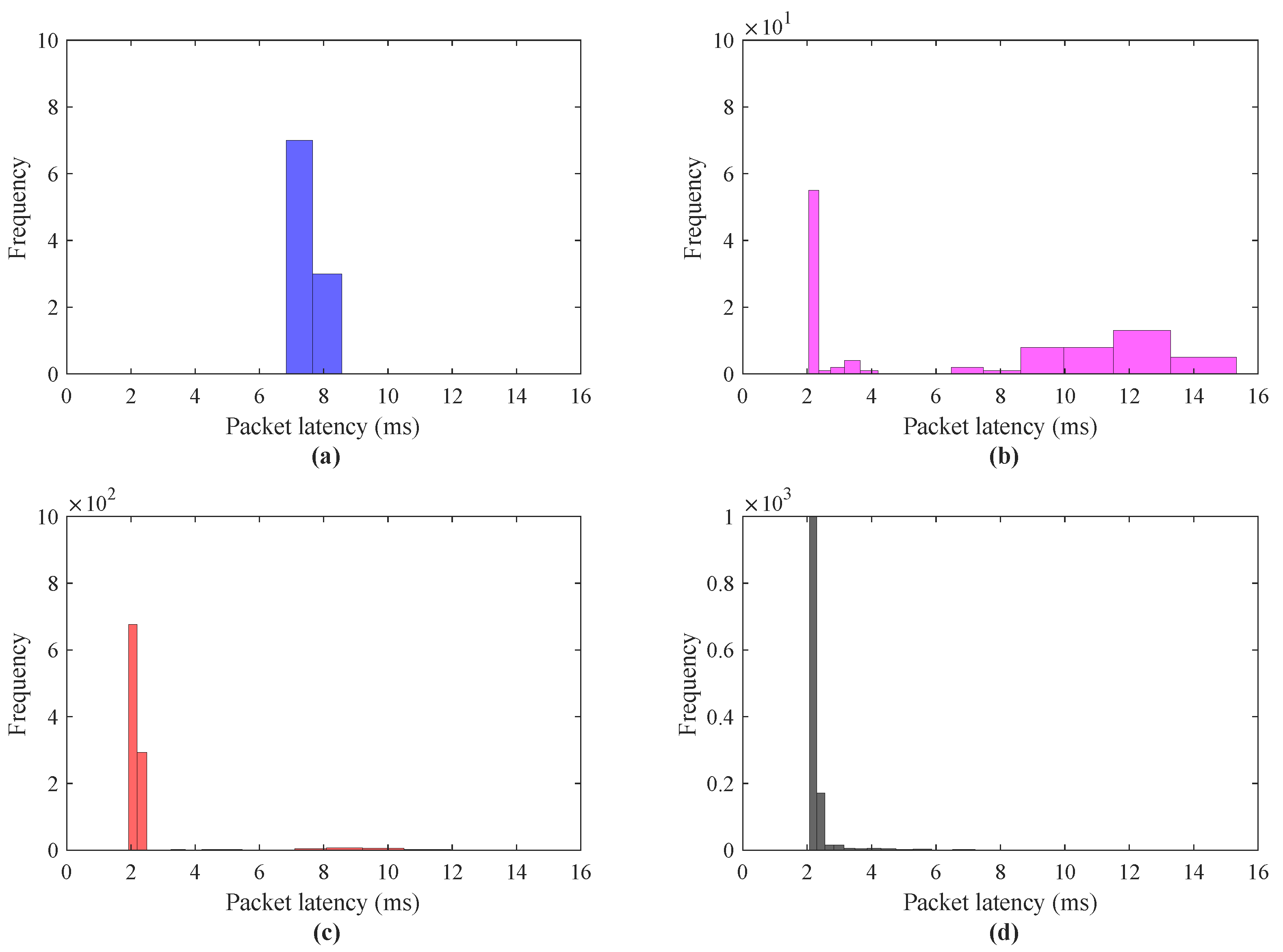
In this paper, we proposed a virtual testbed termed as IoTactileSim to investigate and provision QoS and QoE strict requirements for tactile industrial IoT applications. The proposed IoTactileSim is equipped with a network emulator Mininet and an industrial simulator CoppeliaSim to mimic the real-world communication network and industrial IoT environment. It provides the users to evaluate the efficacy of their designed strategies under possible settings, including advanced core network technologies (SND, NVF), edge intelligence, and application-agnostic parameters (packet size, sampling rate, etc.) for improving QoS and QoE. The proposed IoTactileSim is investigated for two different industrial use case scenarios with haptic data traces and real-time remote interaction. The simulation results indicate that the IoTactileSim is able to handle real-time data traffic then offline scenario by providing communication latency ranges from 6 to 2.2∼2.0 ms, and from 5.8 to 2.1 ms for 10 to 10,000 data packets, respectively. Moreover, the experimentation analysis indicates that the IoTactileSim allows the user to investigate network impairments (latency, jitter, reliability) and can support complex tactile industrial environments with a higher number of data packets. In the early future, we plan to extend the IoTactileSim with network coding and machine learning approaches like federated reinforcement learning at the tactile support engine to integrate it with the 6G network infrastructure.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}