
Estimating Coastal Winds by Assimilating High-Frequency Radar Spectrum Data in SWAN


Abstract
:1. Introduction
2. The Models
2.1. SWAN Wave Model
2.2. HF Radar Scattering Model
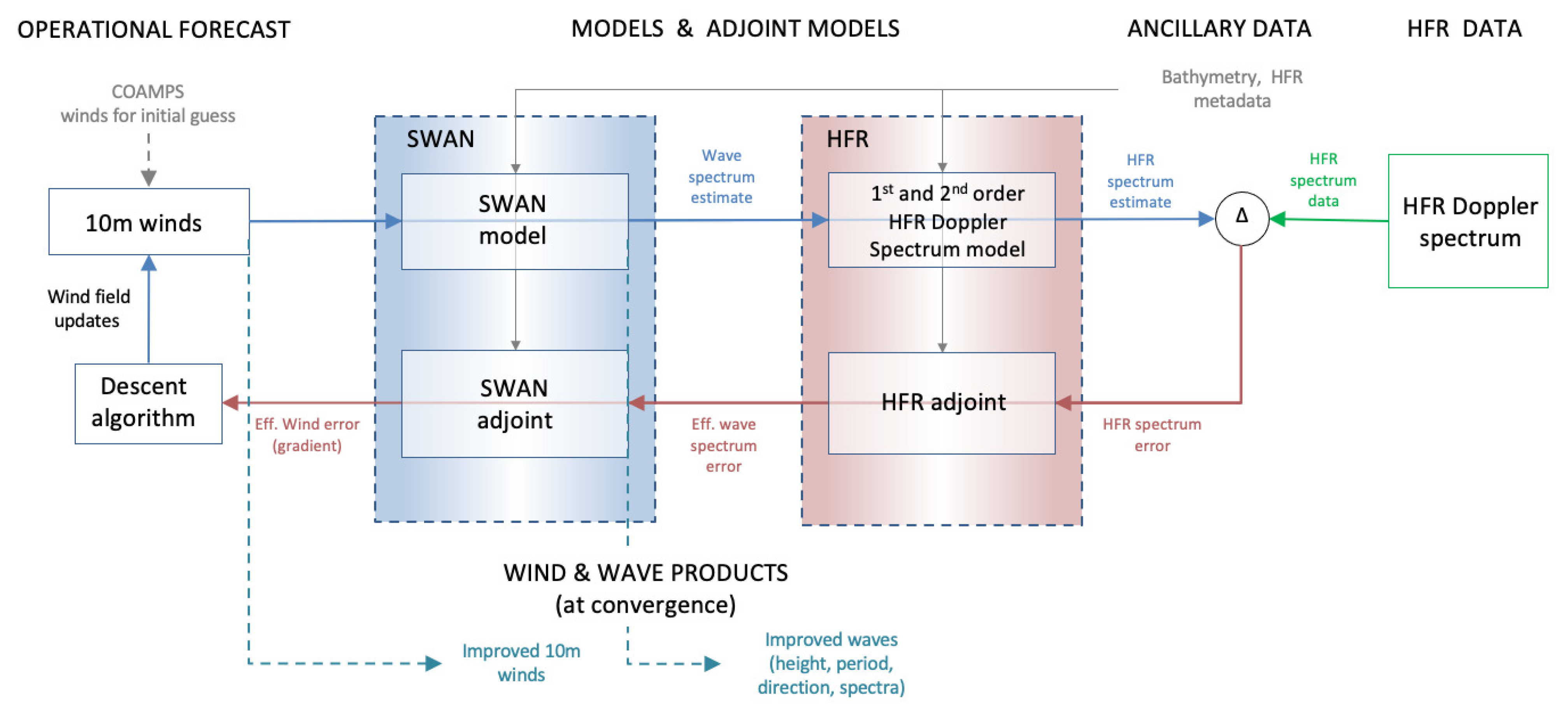
3. The Assimilation Framework
3.1. Cost Function
3.2. Adjoint Models
3.3. Implementation
- The adjoint solution is calculated using the error in the most recent prediction as input;
- Using the adjoint solution, the gradient is determined;
- The conjugate-gradient descent algorithm is used to calculate a new estimate of the wind field and ;
- The SWAN model is run with corrected inputs and a new wave-spectrum prediction for the region is generated;
- The forward HF radar model is run with the new spectrum as input and a new prediction of the data is generated.
4. Results
4.1. Problem Setup
4.2. HF Radar Data Description
4.3. Comparisons to Buoy Wave Data
4.4. Comparisons to Buoy Wind Data
5. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| HFR | High-Frequency Radar |
| SWAN | Simulating WAves Nearshore |
| CODAR | Coastal Ocean Dynamics Applications Radar |
| NDBC | National Data Buoy Center |
| COAMPS | Coupled Ocean Atmosphere Modeling and Prediction System |
| NCOM | Navy Coastal Ocean Model |
References
- Booij, N.; Ris, R.C.; Holthuijsen, L. A third-generation wave model for coastal regions: 1. Model description and validation. J. Geophys. Res. Ocean. 1999, 104, 7649–7666. [Google Scholar] [CrossRef] [Green Version]
- Holthuijsen, L. Waves in Oceanic and Coastal Waters; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]
- Paduan, J.; Shulman, I. HF radar data assimilation in the Monterey Bay area. J. Geophys. Res. 2004, 109, C07S09. [Google Scholar] [CrossRef]
- Ngodock, H.; Muscarella, P.; Carrier, M.; Souopgui, I.; Smith, S. Assimilation of HF Radar Observations in the Chesapeake-Delaware Bay Region Using the Navy Coastal Ocean Model (NCOM) and the Four-Dimensional Variational (4DVAR) Method. In Coastal Ocean Observing Systems; Academic Press: Cambridge, MA, USA, 2015; pp. 373–391. [Google Scholar]
- Marmain, J.; Molcard, A.; Forget, P.; Barth, A.; Ourmières, Y. Assimilation of HF radar surface currents to optimize forcing in the northwestern Mediterranean Sea. Nonlinear Process. Geophys. (Eur. Geosci. Union) 2014, 21, 659–675. [Google Scholar] [CrossRef]
- Siddons, L.; Wyatt, L.; Wolf, J. Assimilation of HF radar data in the SWAN wave model. J. Mar. Syst. 2009, 77, 312–324. [Google Scholar] [CrossRef]
- Waters, J.; Wyatt, L.; Wolf, J.; Hines, A. Data Assimilation of partitioned HF radar wave data into Wavewatch III. Ocean Model. 2013, 72, 17–31. [Google Scholar] [CrossRef]
- Walker, D. Assimilation of SAR Imagery in a Nearshore Spectral Wave Model; Final Report 200236 (dtic assession no. ada445814); General Dynamics Advanced Information Systems: Ypsilanti, MI, USA, 2006. [Google Scholar]
- Veeramony, J.; Walker, D.; Hsu, L. A variational data assimilation system for nearshore application of SWAN. Ocean Model. 2010, 35, 206–214. [Google Scholar] [CrossRef]
- Orzech, M.; Veeramony, J.; Ngodock, H. A variational assimilation system for nearshore wave modeling. J. Atmos. Ocean. Technol. 2013, 30, 953–970. [Google Scholar] [CrossRef]
- Orzech, M.; Veeramony, J.; Ngodock, H.; Flampouris, S.; Souopgui, I. Recent Updates to SWANFAR, a 5DVAR Data Assimilation System for SWAN. Memorandum Report NRL/MR/7320-16-9705; Naval Research Laboratory, Stennis Space Center: Hancock County, MS, USA, 2016. [Google Scholar]
- Walker, D.; Brunner, K. Estimating Nearshore Waves by Assimilating Buoy Directional Spectrum Data in SWAN. J. Ocean. Atmos. Technol. 2021. Accepted. [Google Scholar] [CrossRef]
- Paduan, J.; Graber, H. Introduction to high-frequency radar: Reality and myth. Oceanography 1997, 10, 36–39. [Google Scholar] [CrossRef]
- Ris, R.C.; Holthuijsen, L.H.; Booij, N. A third-generation wave model for coastal regions: 2. Verification. J. Geophys. Res. Ocean. 1999, 104, 7667–7681. [Google Scholar] [CrossRef]
- Young, I.; Babanin, A.; Zieger, S. The Decay Rate of Ocean Swell Observed by Altimeter. J. Phys. Oceanogr. 2013, 43, 2322–2333. [Google Scholar] [CrossRef]
- Zieger, S.; Babanin, A.; Rogers, W.; Young, I. Observation-based source terms in the third-generation wave model WAVEWATCH. Ocean Model. 2015, 96, 2–25. [Google Scholar] [CrossRef] [Green Version]
- Ardhuin, F.; Rogers, E.; Babanin, A.V.; Filipot, J.F.; Magne, R.; Roland, A.; van der Westhuysen, A.; Queffeulou, P.; Lefevre, J.M.; Aouf, L.; et al. Semiempirical Dissipation Source Functions for Ocean Waves. Part I: Definition, Calibration and Validation. J. Phys. Oceanogr. 2010, 40, 1917–1941. [Google Scholar] [CrossRef] [Green Version]
- Rogers, W.; Babanin, A.; Wang, D. Observation-consistent input and white-capping dissipation in a model for wind-generated surface wave: Description and simple calculations. J. Atmos. Ocean. Technol. 2012, 29, 1329–1346. [Google Scholar] [CrossRef]
- Komen, G.J.; Hasselmann, S.; Hasselmann, K. On the Existence of a Fully Developed Wind-sea Spectrum. J. Phys. Oceanogr. 1984, 14, 1271–1285. [Google Scholar] [CrossRef]
- SWAN Scienctific and Technical Documentation; SWAN Cycle III Version 41.20AB; Delft University of Technology: Delft, The Netherlands, 2019.
- Polak, E. Computational Methods in Optimization; Academic Press: Cambridge, MA, USA, 1971. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Station | ||||||
|---|---|---|---|---|---|---|
| () | () | () | () | () | () | |
| 46217 | 0.67 m | 3.13 m | −0.16 s | 2056 s | −8.67° | 93.18° |
| (1.05 m) | (0.40 m) | (6.77 s) | (1.36 s) | (180.80°) | (102.59°) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muscarella, P.; Brunner, K.; Walker, D. Estimating Coastal Winds by Assimilating High-Frequency Radar Spectrum Data in SWAN. Sensors 2021, 21, 7811. https://doi.org/10.3390/s21237811
Muscarella P, Brunner K, Walker D. Estimating Coastal Winds by Assimilating High-Frequency Radar Spectrum Data in SWAN. Sensors. 2021; 21(23):7811. https://doi.org/10.3390/s21237811
Chicago/Turabian StyleMuscarella, Philip, Kelsey Brunner, and David Walker. 2021. "Estimating Coastal Winds by Assimilating High-Frequency Radar Spectrum Data in SWAN" Sensors 21, no. 23: 7811. https://doi.org/10.3390/s21237811
APA StyleMuscarella, P., Brunner, K., & Walker, D. (2021). Estimating Coastal Winds by Assimilating High-Frequency Radar Spectrum Data in SWAN. Sensors, 21(23), 7811. https://doi.org/10.3390/s21237811