
Force Plate with Simple Mechanical Springs and Separated Noncontact Sensor Elements


Abstract
:
1. Introduction
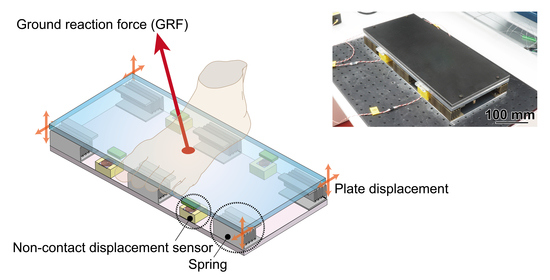
2. Design and Principle
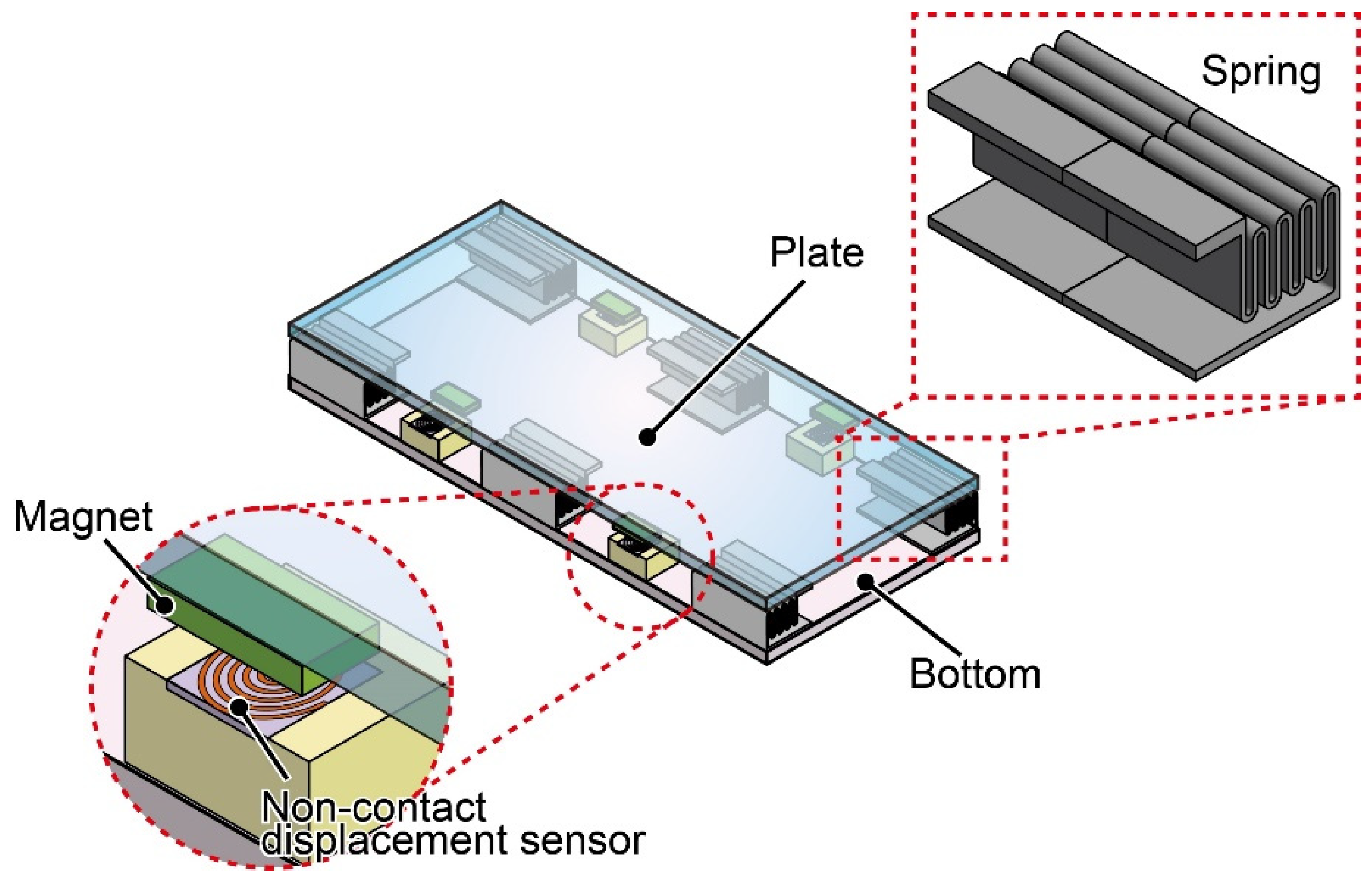
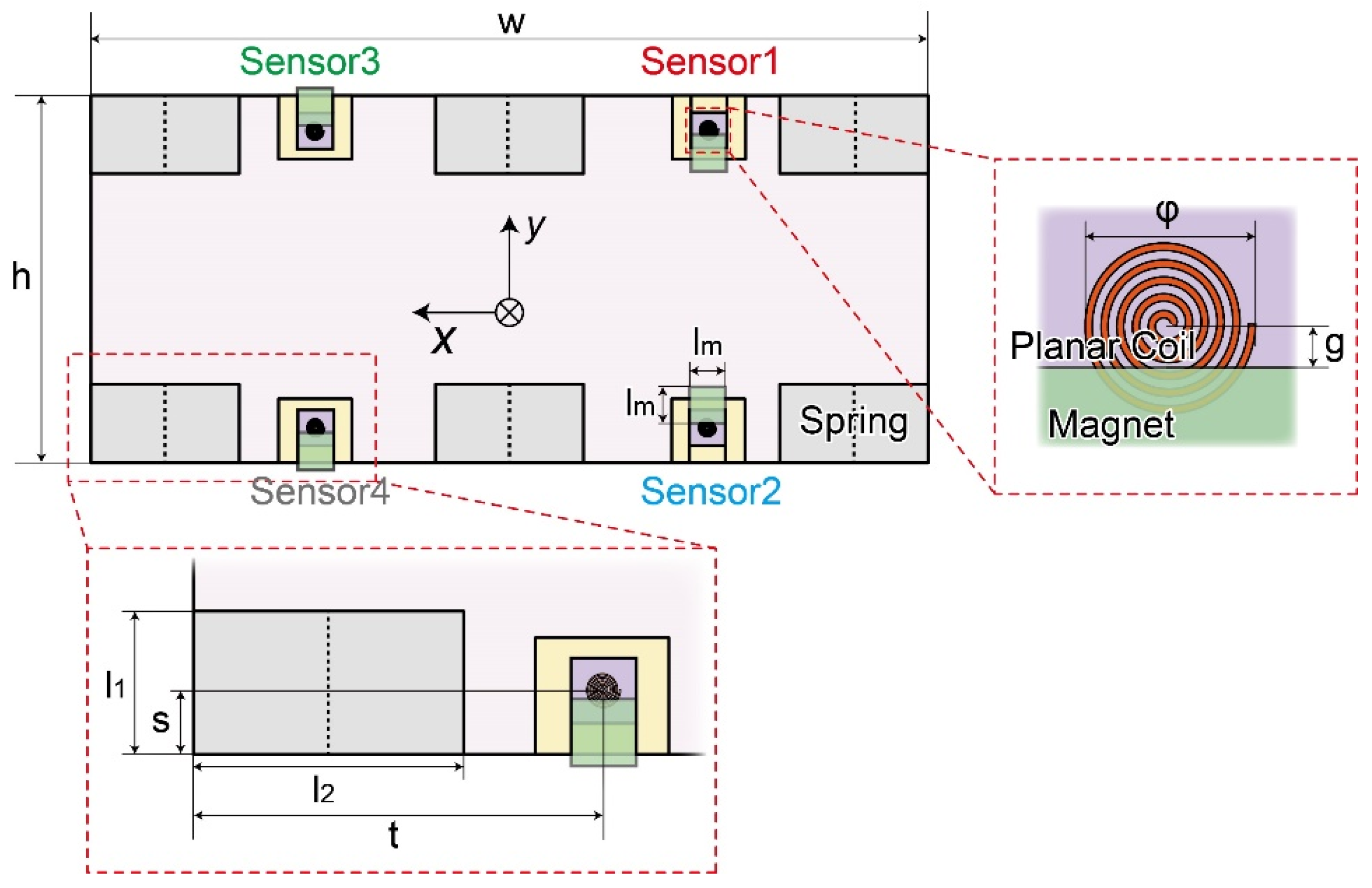
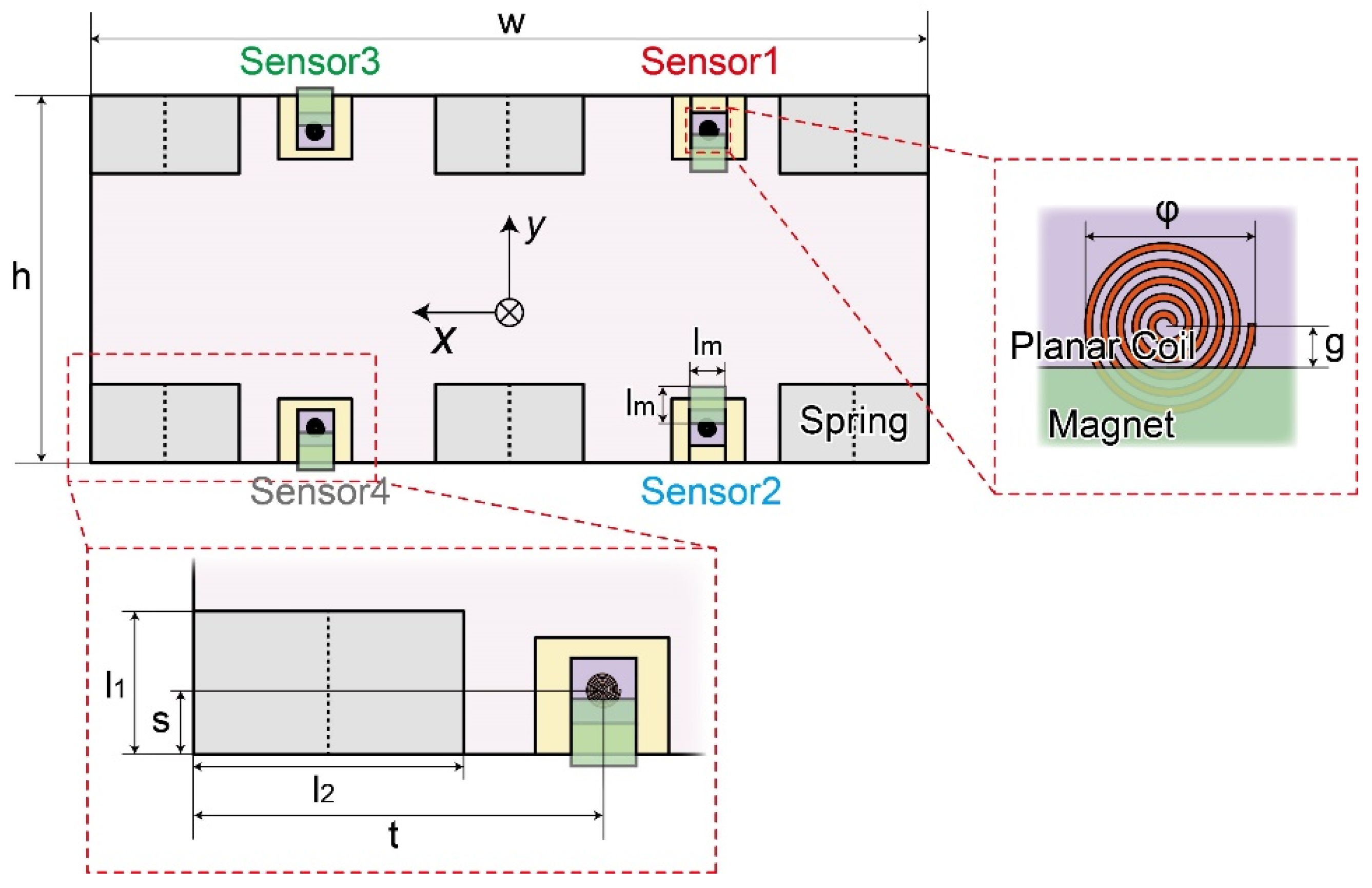
2.1. Sensor Design
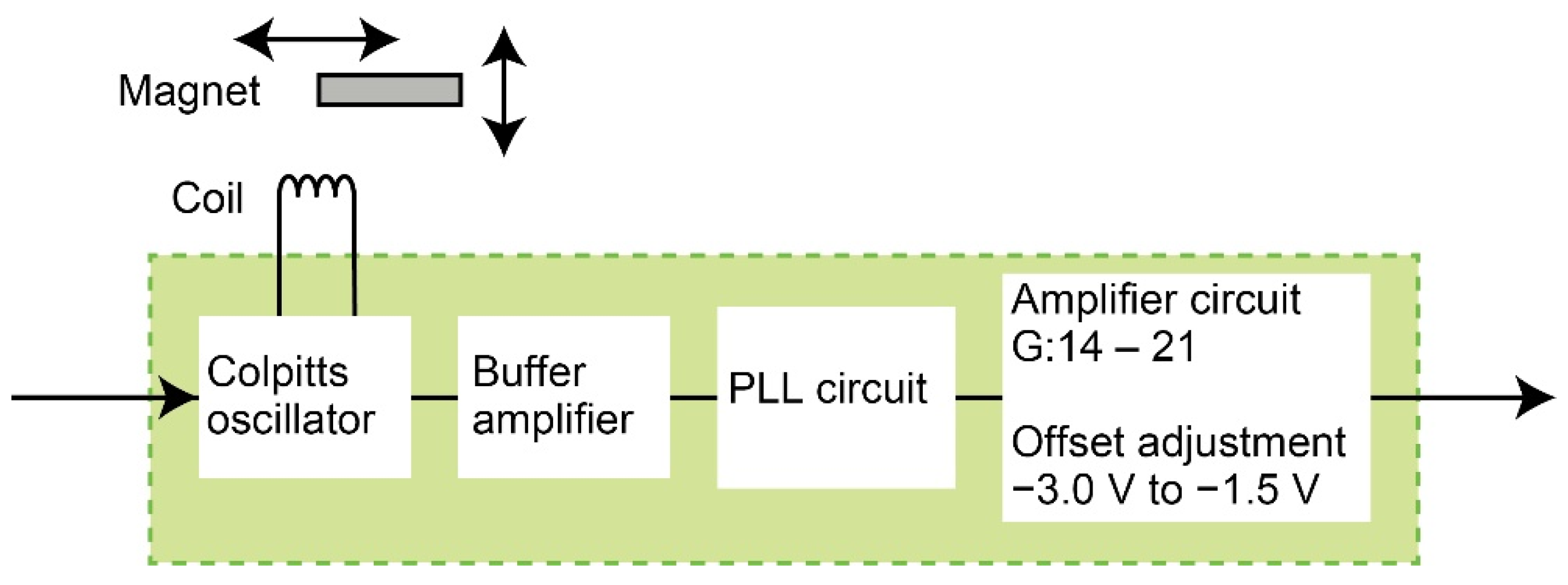
2.2. Force Detection Principle
3. Fabrication and Assembly
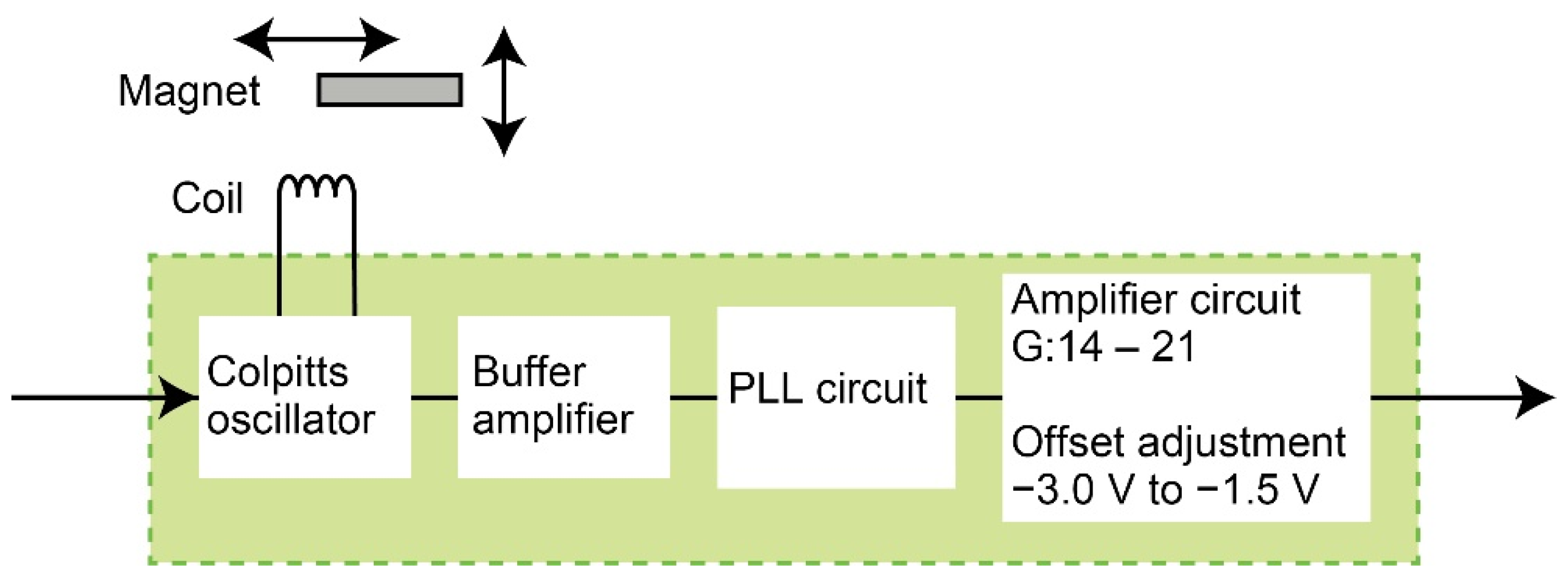
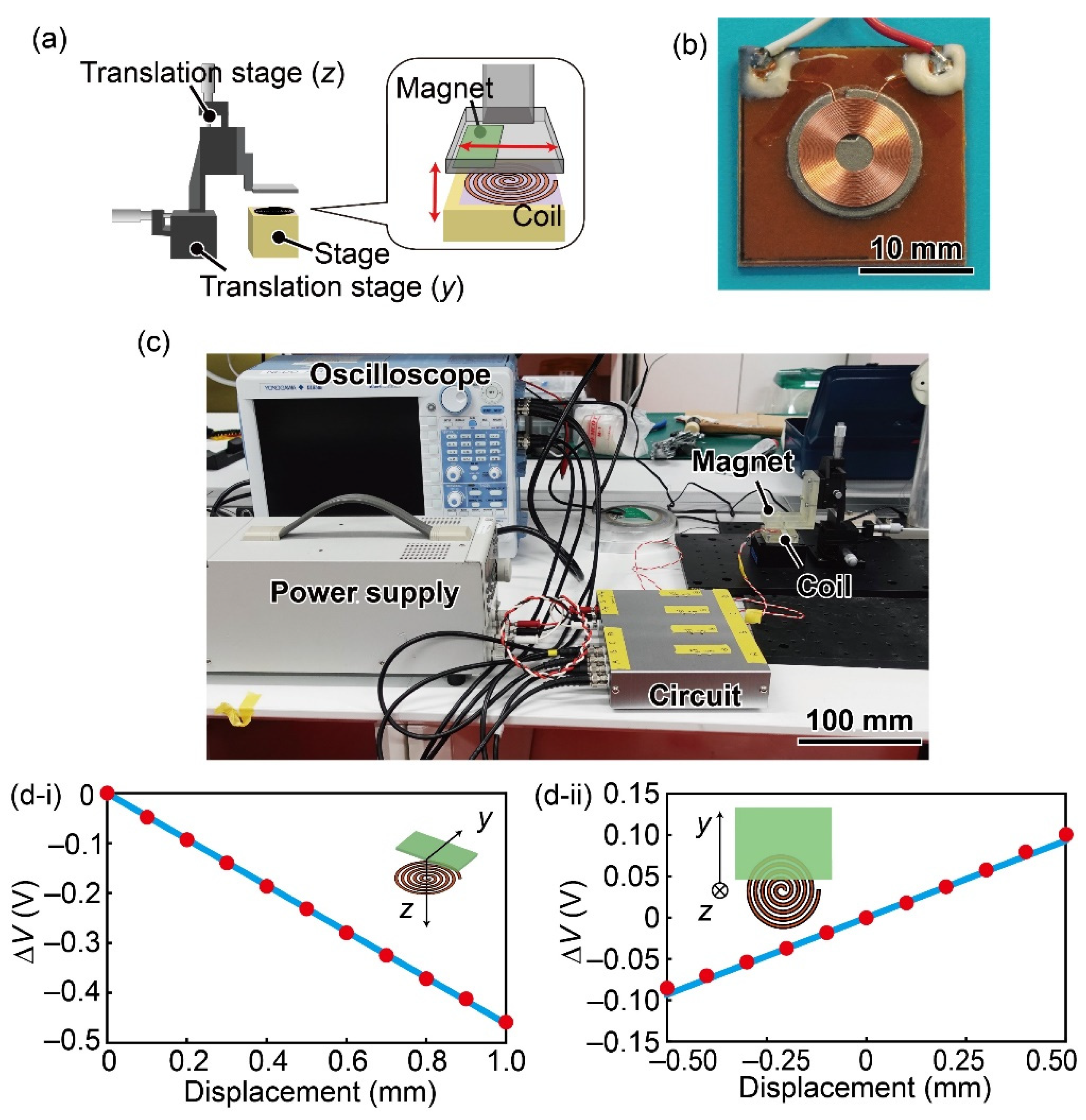
3.1. Sensing Element
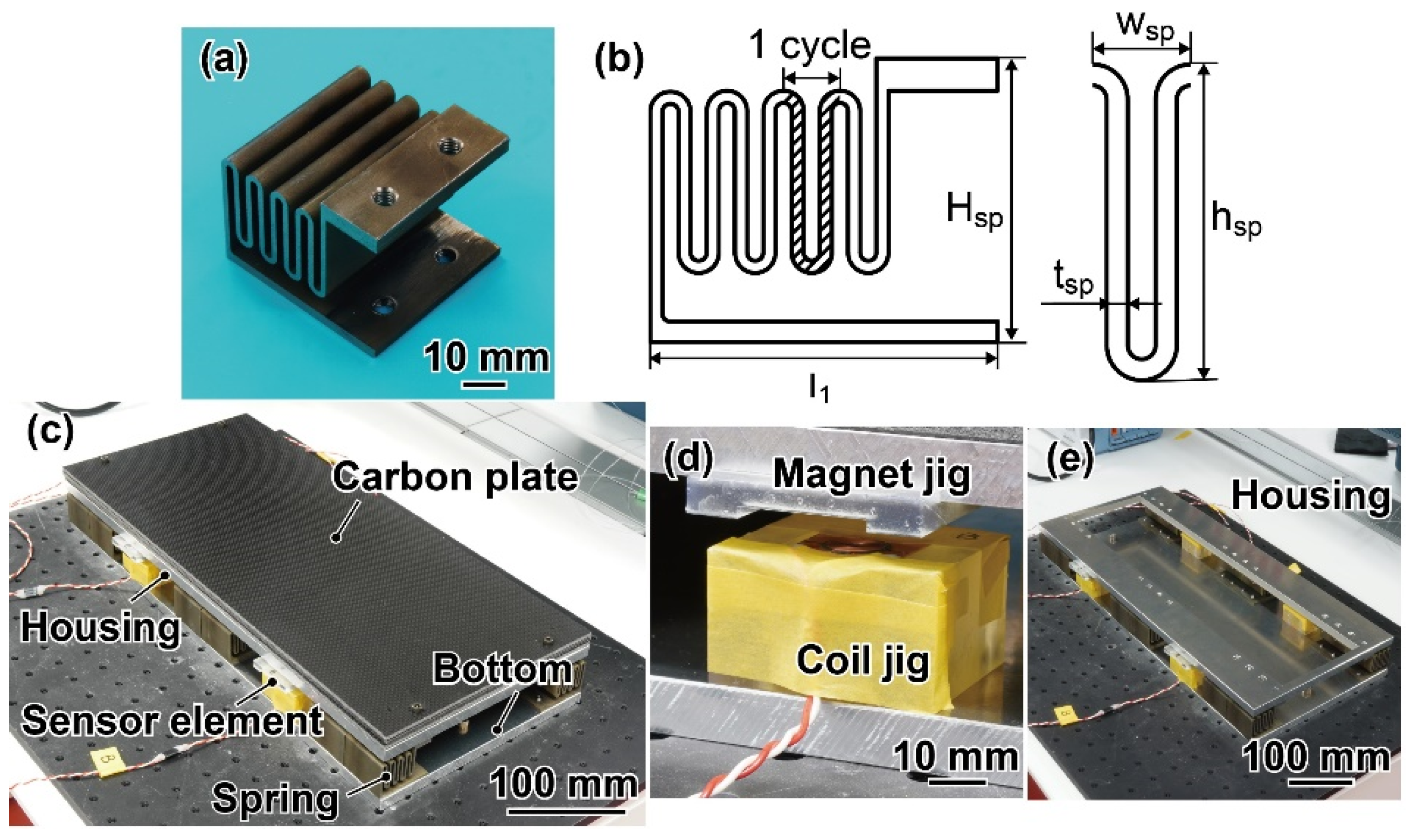
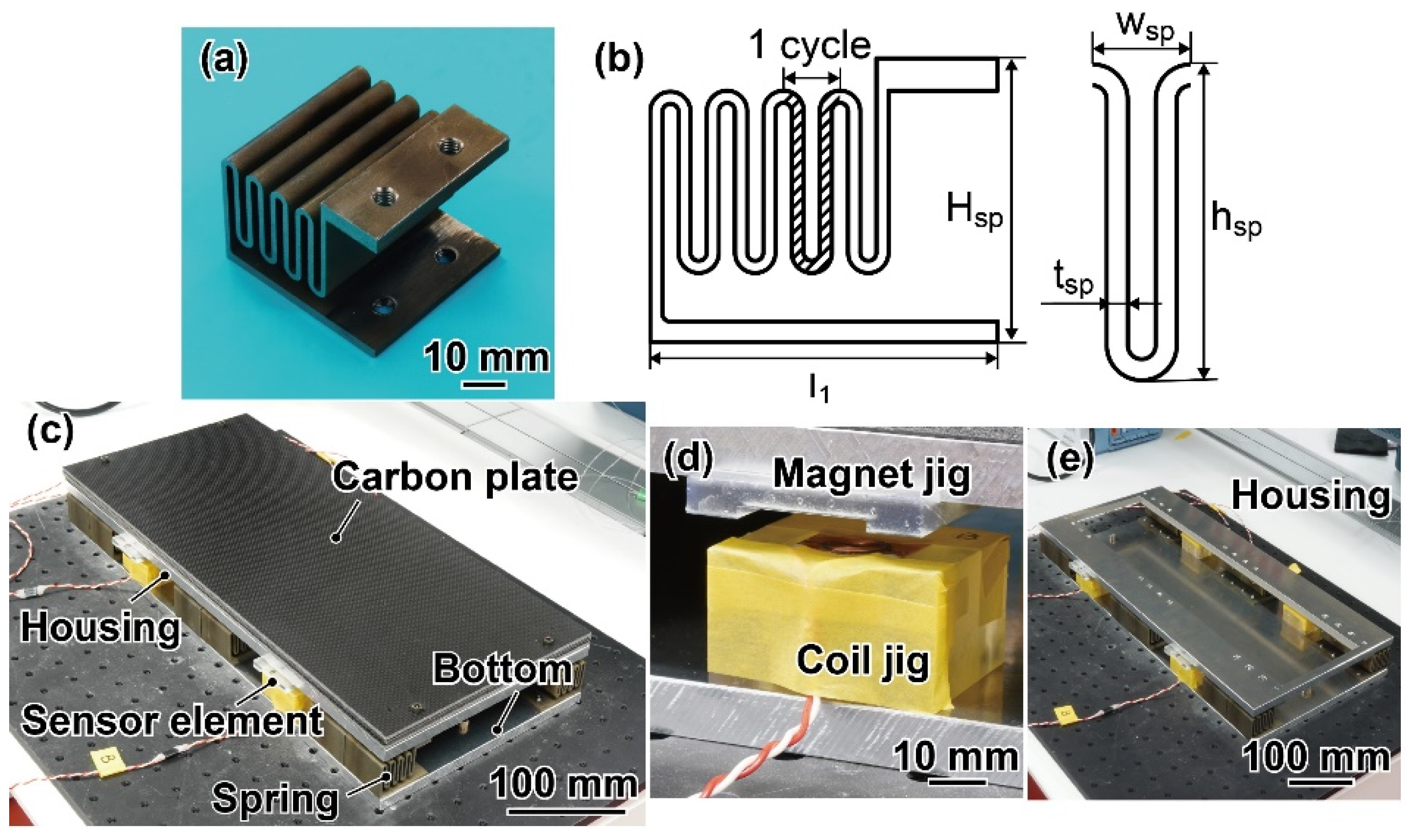
3.2. Mechanical Spring
3.3. Sensor Assembly
4. Experiment and Results
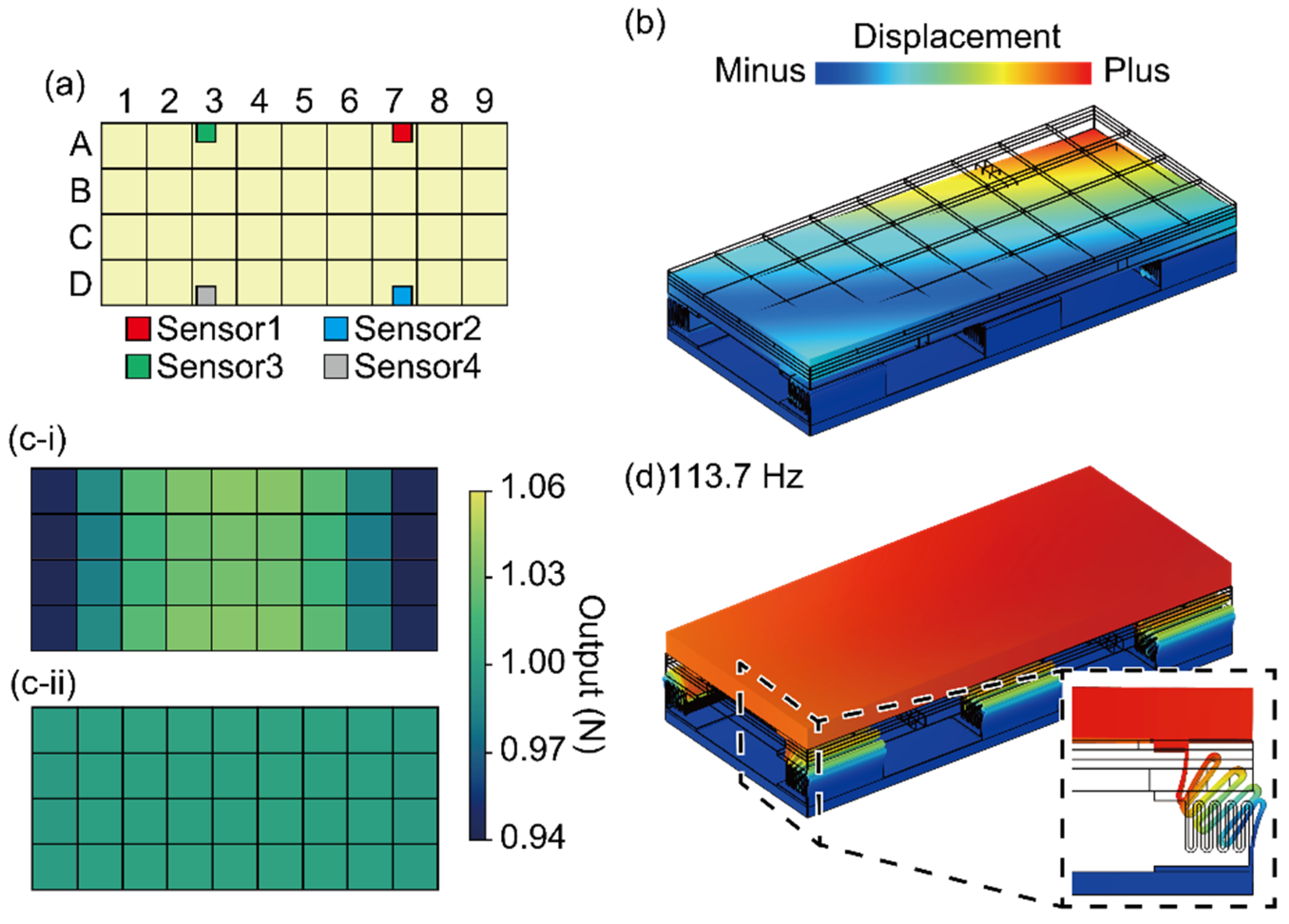
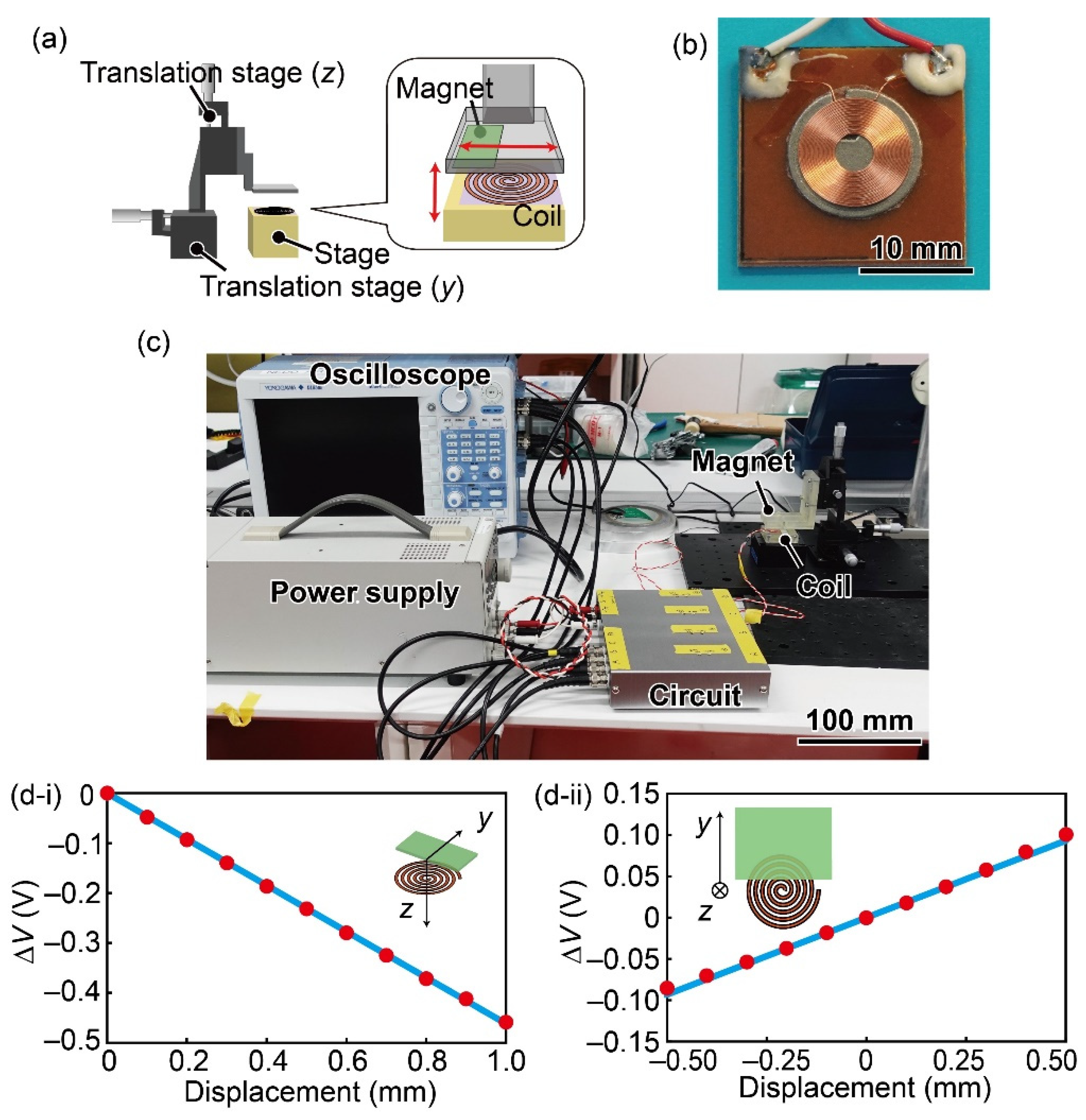
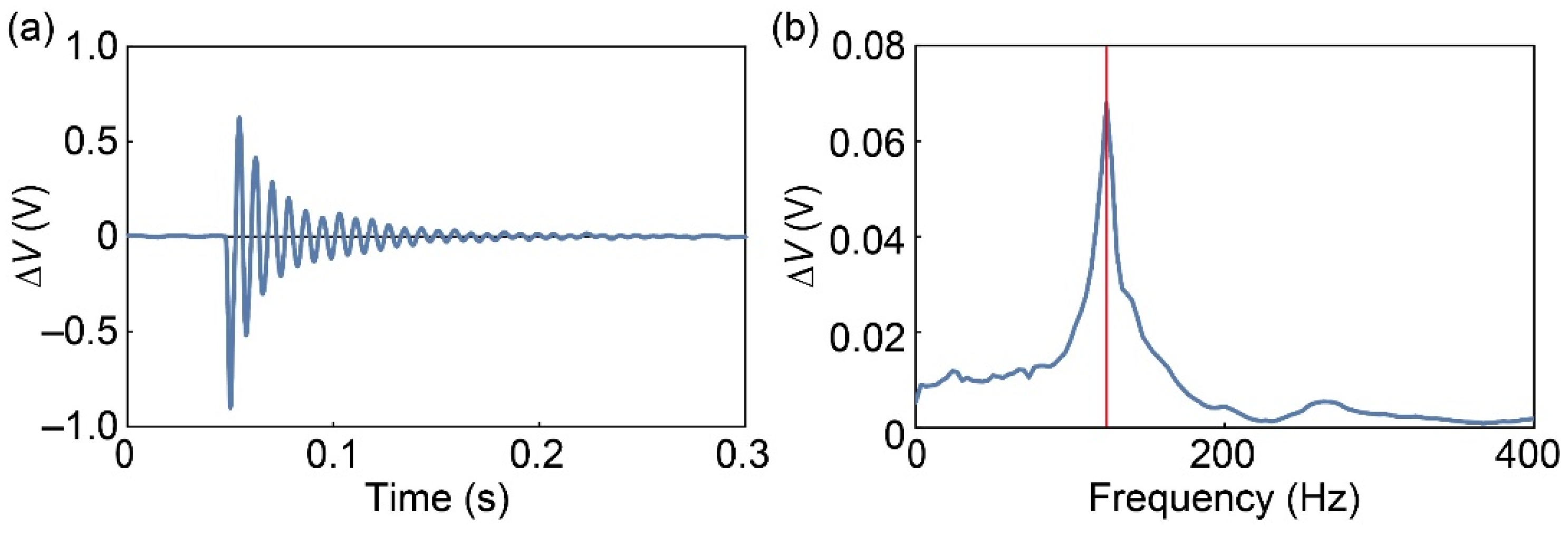
4.1. Resonant Frequency
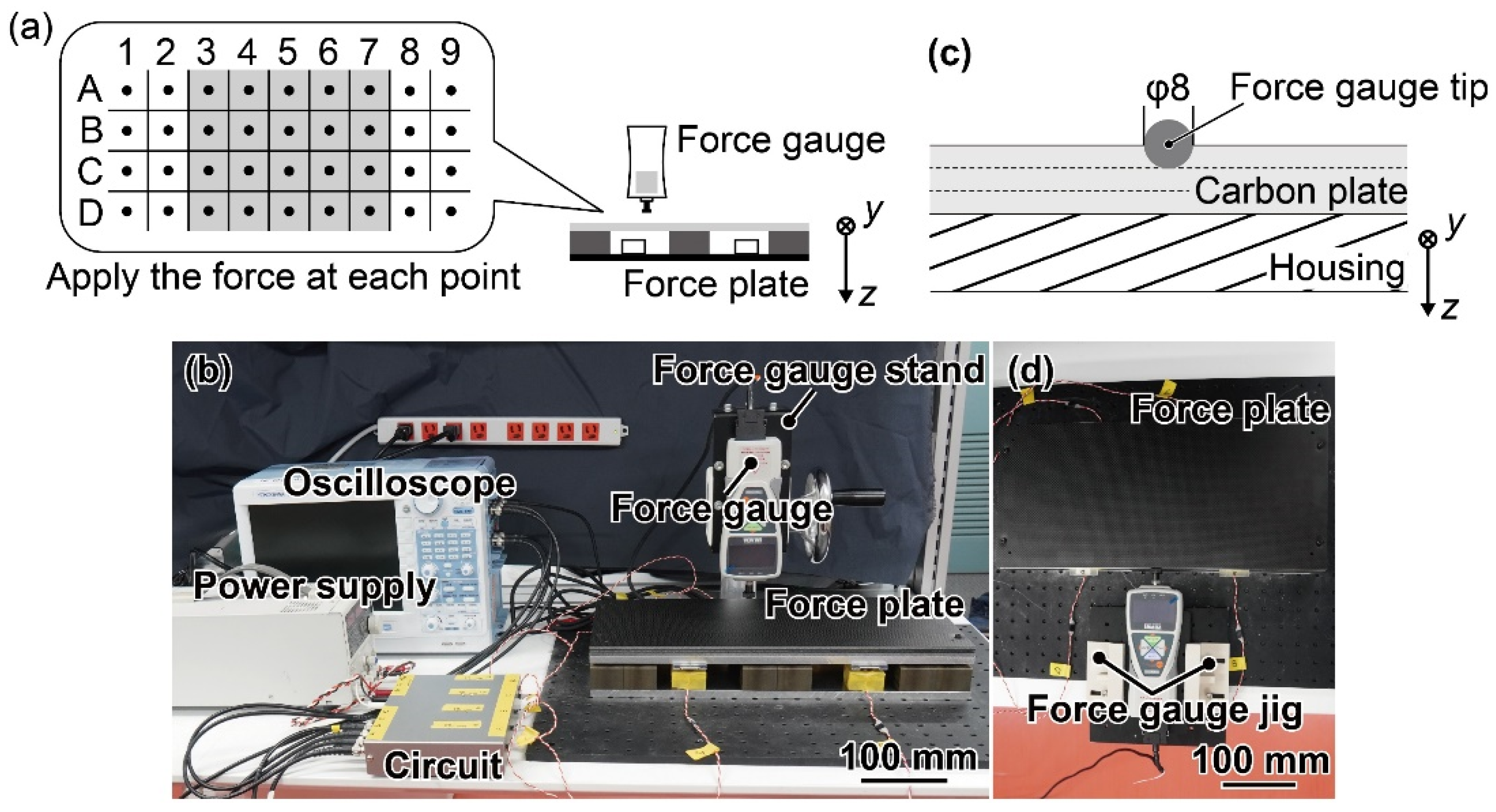
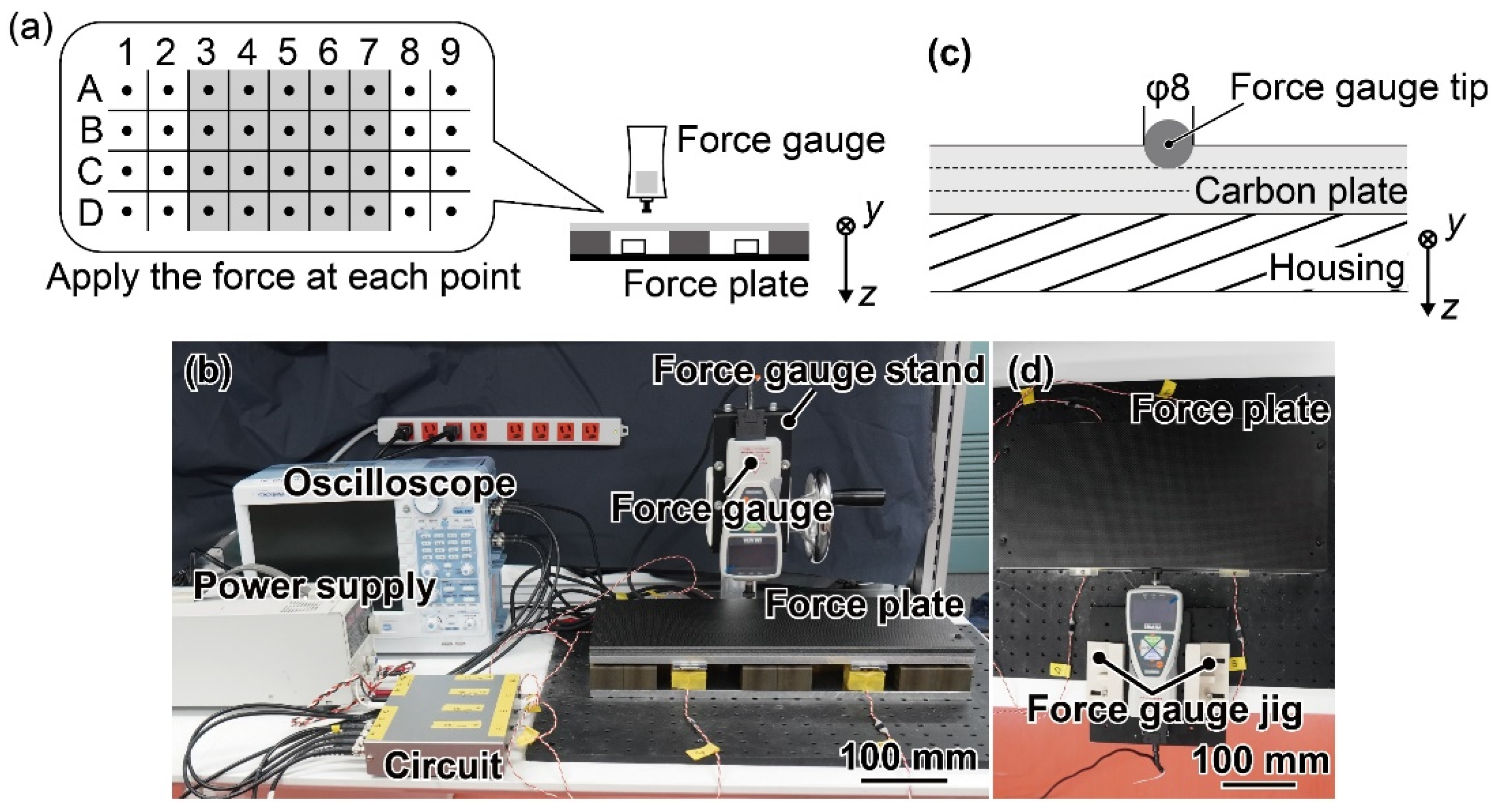
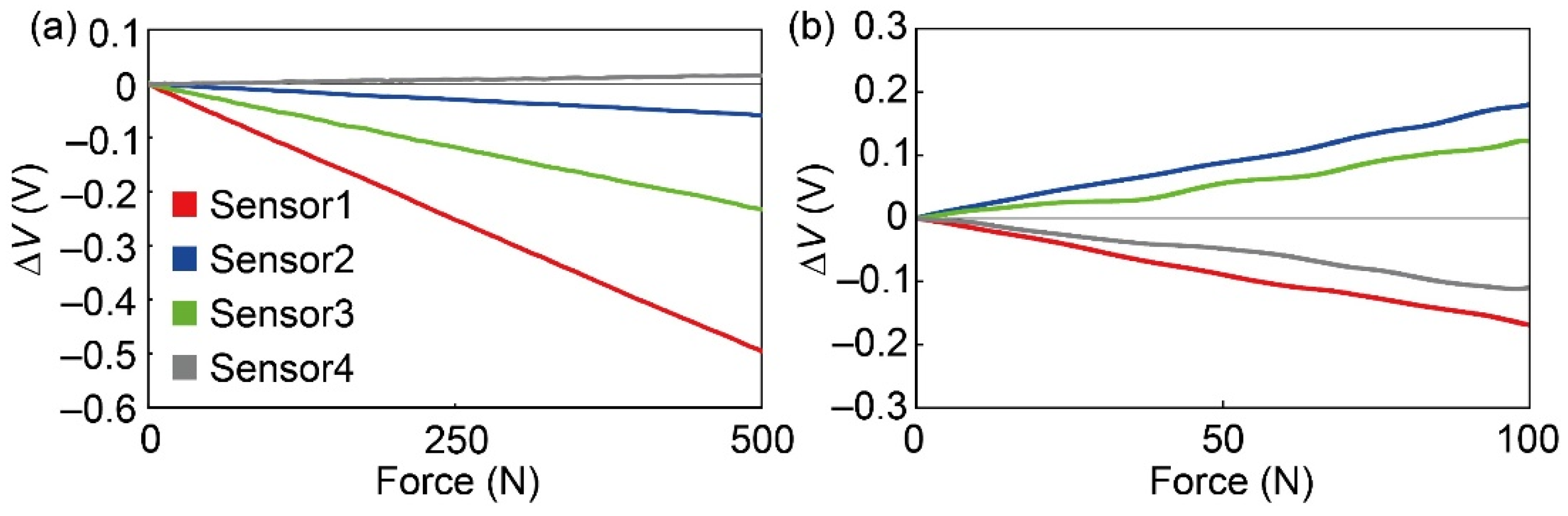
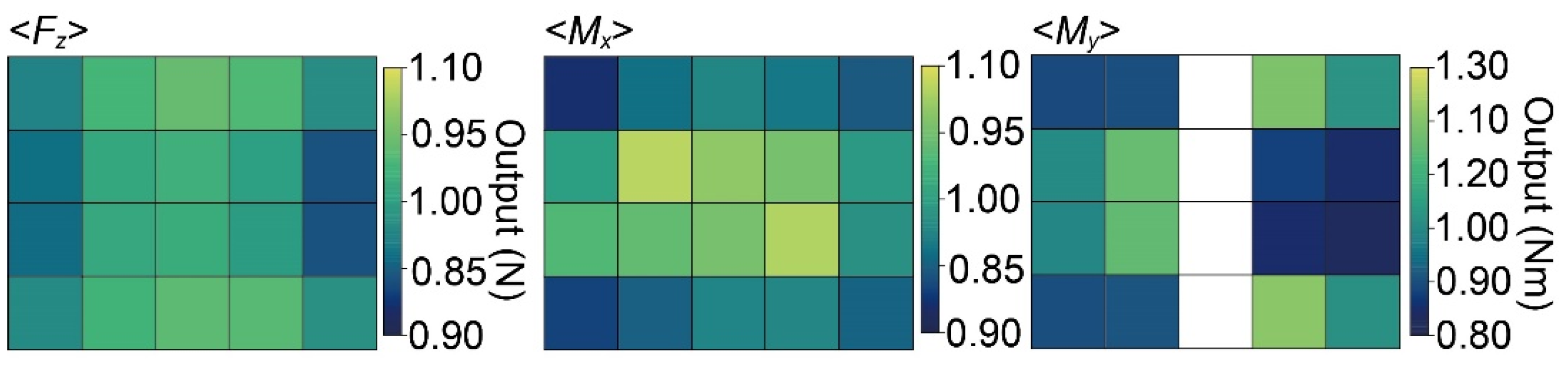
4.2. Force Calibration
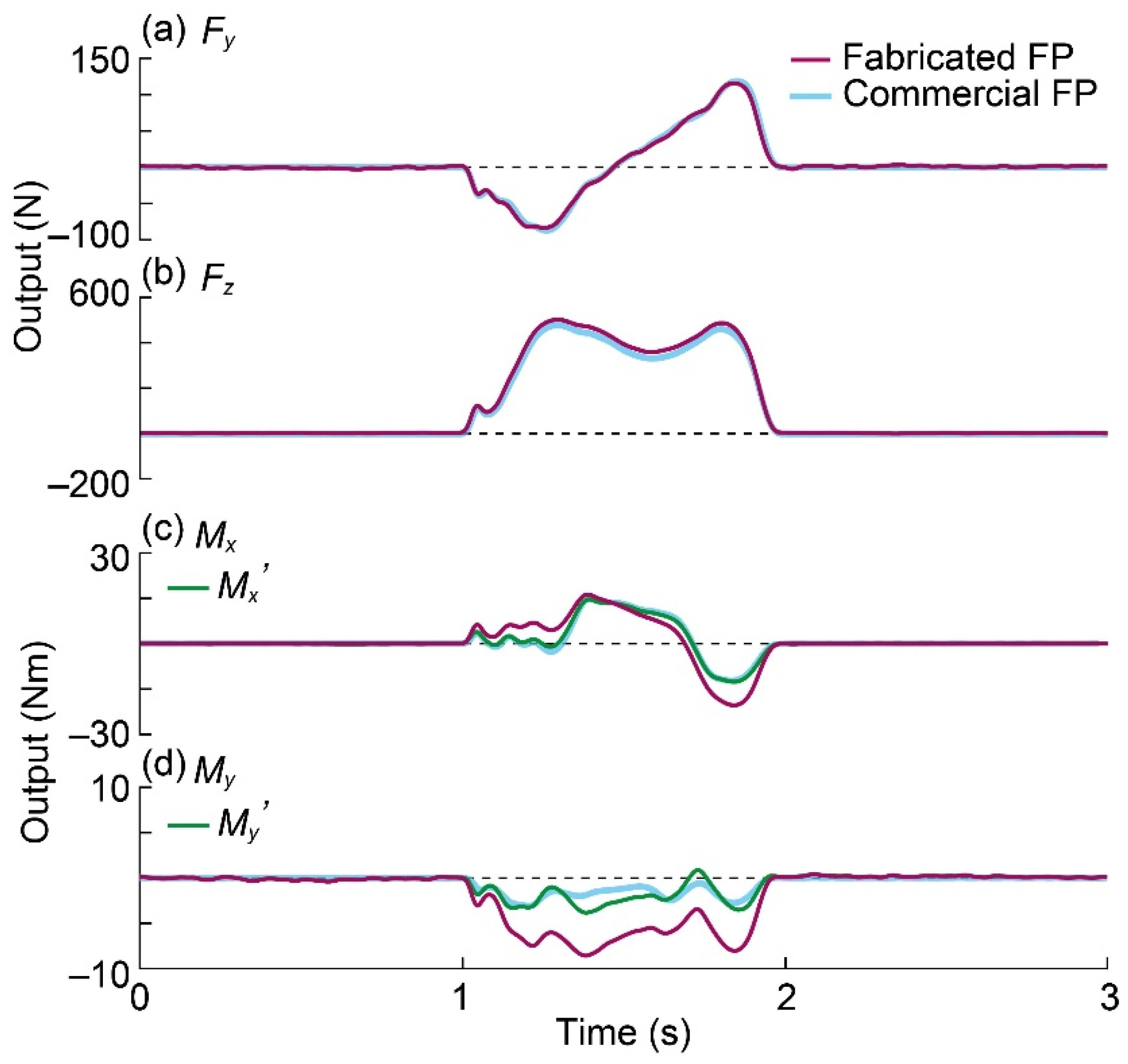
4.3. Walking Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Akashi, P.M.H.; Sacco, I.C.N.; Watari, R.; Hennig, E. The effect of diabetic neuropathy and previous foot ulceration in EMG and ground reaction forces during gait. Clin. Biomech. 2008, 23, 584–592. [Google Scholar] [CrossRef] [PubMed]
- Stacoff, A.; de Quervain, I.A.K.; Luder, G.; List, R.; Stüssi, E. Ground reaction forces on stairs. Part II: Knee implant patients versus normals. Gait Posture 2007, 26, 48–58. [Google Scholar] [CrossRef]
- Begg, R.K.; Sparrow, W.A.; Lythgo, N.D. Time-domain analysis of foot-ground reaction forces in negotiating obstacles. Gait Posture 1998, 7, 99–109. [Google Scholar] [CrossRef]
- Castro, M.; Abreu, S.; Sousa, H.; Machado, L.; Santos, R.; Vilas-Boas, J.P. Ground reaction forces and plantar pressure distribution during occasional loaded gait. Appl. Ergon. 2013, 44, 503–509. [Google Scholar] [CrossRef] [Green Version]
- Cavanagh, P.R.; Lafortune, M.A. GRF in distance running. J. Biomech. 1980, 13, 397–406. [Google Scholar] [CrossRef]
- Hong, H.; Kim, S.; Kim, C.; Lee, S.; Park, S. Spring-like gait mechanics observed during walking in both young and older adults. J. Biomech. 2013, 46, 77–82. [Google Scholar] [CrossRef]
- Mei, Q.; Fernandez, J.; Fu, W.; Feng, N.; Gu, Y. A comparative biomechanical analysis of habitually unshod and shod runners based on a foot morphological difference. Hum. Mov. Sci. 2015, 42, 38–53. [Google Scholar] [CrossRef] [PubMed]
- Kram, R.; Powell, A.J. A treadmill-mounted force platform A treadmill-mounted force platform. J. Appl. Physiol. 2012, 67, 1692–1698. [Google Scholar] [CrossRef]
- Masani, K.; Kouzaki, M.; Fukunaga, T. Variability of ground reaction forces during treadmill walking. J. Appl. Physiol. 2002, 92, 1885–1890. [Google Scholar] [CrossRef] [Green Version]
- Jansen, E.C.; Vittas, D.; Hellberg, S.; Hansen, J. Normal gait of Young and old men and women: Ground reaction force measurement on a treadmill. Acta Orthop. 1982, 53, 193–196. [Google Scholar] [CrossRef] [Green Version]
- Park, J.; Na, Y.; Gu, G.; Kim, J. Flexible insole ground reaction force measurement shoes for jumping and running. In Proceedings of the 6th IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics, Singapore, 26–29 June 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1062–1067. [Google Scholar] [CrossRef]
- Liedtke, C.; Fokkenrood, S.A.W.; Menger, J.T.; van der Kooij, H.; Veltink, P.H. Evaluation of instrumented shoes for ambulatory assessment of ground reaction forces. Gait Posture 2007, 26, 39–47. [Google Scholar] [CrossRef] [PubMed]
- Heglund, B.Y.N.C. Short Communication Force-Plate to Measure Ground Reaction Forces. J. Exp. Biol. 1981, 93, 333–338. [Google Scholar] [CrossRef]
- Ferryanto, F.; Akbar, M.M.; Wicaksono, S.; Mahyuddin, A.I. Design, Manufacture, and Testing of a Low-Cost Force Platform with 3-Axis Load Cell. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2021; Volume 1109, p. 012021. [Google Scholar] [CrossRef]
- Silva, M.G.; Moreira, P.V.S.; Rocha, H.M. Development of a low cost force platform for biomechanical parameters analysis. Res. Biomed. Eng. 2017, 33, 259–268. [Google Scholar] [CrossRef] [Green Version]
- Ogawa, A.; Mita, A.; Yorozu, A.; Takahashi, M. Markerless knee joint position measurement using depth data during stair walking. Sensors 2017, 17, 2698. [Google Scholar] [CrossRef] [Green Version]
- Liikavainio, T.; Isolehto, J.; Helminen, H.J.; Perttunen, J.; Lepola, V.; Kiviranta, I.; Arokoski, J.P.A.; Komi, P.V. Loading and gait symmetry during level and stair walking in asymptomatic subjects with knee osteoarthritis: Importance of quadriceps femoris in reducing impact force during heel strike? Knee 2007, 14, 231–238. [Google Scholar] [CrossRef]
- Ackermans, T.M.A.; Francksen, N.C.; Casana-Eslava, R.V.; Lees, C.; Baltzopoulos, V.; Lisboa, P.J.G.; Hollands, M.A.; O’Brien, T.D.; Maganaris, C.N. A novel multivariate approach for biomechanical profiling of stair negotiation. Exp. Gerontol. 2019, 124, 110646. [Google Scholar] [CrossRef]
- Ackermans, T.M.A.; Francksen, N.C.; Casana-Eslava, R.V.; Lees, C.; Baltzopoulos, V.; Lisboa, P.J.G.; Hollands, M.A.; O’Brien, T.D.; Maganaris, C.N. Stair negotiation behaviour of older individuals: Do step dimensions matter? J. Biomech. 2020, 101, 109616. [Google Scholar] [CrossRef]
- Ackermans, T.; Francksen, N.; Lees, C.; Papatzika, F.; Arampatzis, A.; Baltzopoulos, V.; Lisboa, P.; Hollands, M.; O’Brien, T.; Maganaris, C. Prediction of Balance Perturbations and Falls on Stairs in Older People Using a Biomechanical Profiling Approach: A 12-Month Longitudinal Study. J. Gerontol.-Ser. A Biol. Sci. Med. Sci. 2021, 76, 638–646. [Google Scholar] [CrossRef]
- Wang, K.; Delbaere, K.; Brodie, M.A.D.; Lovell, N.H.; Kark, L.; Lord, S.R.; Redmond, S.J. Differences between Gait on Stairs and Flat Surfaces in Relation to Fall Risk and Future Falls. IEEE J. Biomed. Health Inform. 2017, 21, 1479–1486. [Google Scholar] [CrossRef]
- Foster, R.J.; Maganaris, C.N.; Reeves, N.D.; Buckley, J.G. Centre of mass control is reduced in older people when descending stairs at an increased riser height. Gait Posture 2019, 73, 305–314. [Google Scholar] [CrossRef]
- Roys, M.S. Serious stair injuries can be prevented by improved stair design. Appl. Ergon. 2001, 32, 135–139. [Google Scholar] [CrossRef]
- Novak, A.C.; Komisar, V.; Maki, B.E.; Fernie, G.R. Age-related differences in dynamic balance control during stair descent and effect of varying step geometry. Appl. Ergon. 2016, 52, 275–284. [Google Scholar] [CrossRef]
- Ogawa, A.; Iijima, H.; Takahashi, M. Staircase design for health monitoring in elderly people. J. Build. Eng. 2021, 37, 102152. [Google Scholar] [CrossRef]
- Riener, R.; Rabuffetti, M.; Frigo, C. Stair Ascent and Descent at Different Inclinations. Gait Posture 2002, 15, 32–44. [Google Scholar] [CrossRef]
- Zumwalt, A.C.; Hamrick, M.; Schmitt, D. Force plate for measuring the ground reaction forces in small animal locomotion. J. Biomech. 2006, 39, 2877–2881. [Google Scholar] [CrossRef]
- Wilson, A.M.; Seelig, T.J.; Shield, R.A.; Silverman, B.W. The effect of foot imbalance on point of force application in the horse. Equine Vet. J. 1998, 30, 540–545. [Google Scholar] [CrossRef]
- Stacoff, A.; Diezi, C.; Luder, G.; Stüssi, E.; Kramers-De Quervain, I.A. Ground reaction forces on stairs: Effects of stair inclination and age. Gait Posture 2005, 21, 24–38. [Google Scholar] [CrossRef]
- Christina, K.A.; Cavanagh, P.R. Ground reaction forces and frictional demands during stair descent: Effects of age and illumination. Gait Posture 2002, 15, 153–158. [Google Scholar] [CrossRef]
- Ruben, R.J. Special communication. Int. J. Pediatr. Otorhinolaryngol. 2000, 54, 77. [Google Scholar] [CrossRef]
- Villeger, D.; Costes, A.; Watier, B.; Moretto, P. An algorithm to decompose ground reaction forces and moments from a single force platform in walking gait. Med. Eng. Phys. 2014, 36, 1530–1535. [Google Scholar] [CrossRef] [PubMed]
- Marasovič, T.; Cecič, M.; Zanchi, V. Analysis and interpretation of ground reaction forces in normal gait. WSEAS Trans. Syst. 2009, 8, 1105–1114. [Google Scholar]
- Keller, T.S.; Weisberger, A.M.; Ray, J.L.; Hasan, S.S.; Shiavi, R.G.; Spengler, D.M. Relationship between vertical ground reaction force and speed during walking, slow jogging, and running. Clin. Biomech. 1996, 11, 253–259. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| h | w | l1 | l2 | s | t | φ | g | lm | |
|---|---|---|---|---|---|---|---|---|---|
| Length (mm) | 200 | 450 | 43 | 80 | 24 | 120 | 10 | 3 | 20 |
| Fx | Fy | Fz | Mx | My | |
|---|---|---|---|---|---|
| Sensor 1 | NA | − | − | − | − |
| Sensor 2 | NA | + | − | + | − |
| Sensor 3 | NA | + | − | − | + |
| Sensor 4 | NA | − | − | + | + |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kawasaki, Y.; Ogawa, A.; Takahashi, H. Force Plate with Simple Mechanical Springs and Separated Noncontact Sensor Elements. Sensors 2021, 21, 7092. https://doi.org/10.3390/s21217092
Kawasaki Y, Ogawa A, Takahashi H. Force Plate with Simple Mechanical Springs and Separated Noncontact Sensor Elements. Sensors. 2021; 21(21):7092. https://doi.org/10.3390/s21217092
Chicago/Turabian StyleKawasaki, Yuta, Ami Ogawa, and Hidetoshi Takahashi. 2021. "Force Plate with Simple Mechanical Springs and Separated Noncontact Sensor Elements" Sensors 21, no. 21: 7092. https://doi.org/10.3390/s21217092
APA StyleKawasaki, Y., Ogawa, A., & Takahashi, H. (2021). Force Plate with Simple Mechanical Springs and Separated Noncontact Sensor Elements. Sensors, 21(21), 7092. https://doi.org/10.3390/s21217092