Energy-Efficient Clustering Multi-Hop Routing Protocol in a UWSN




Abstract
1. Introduction
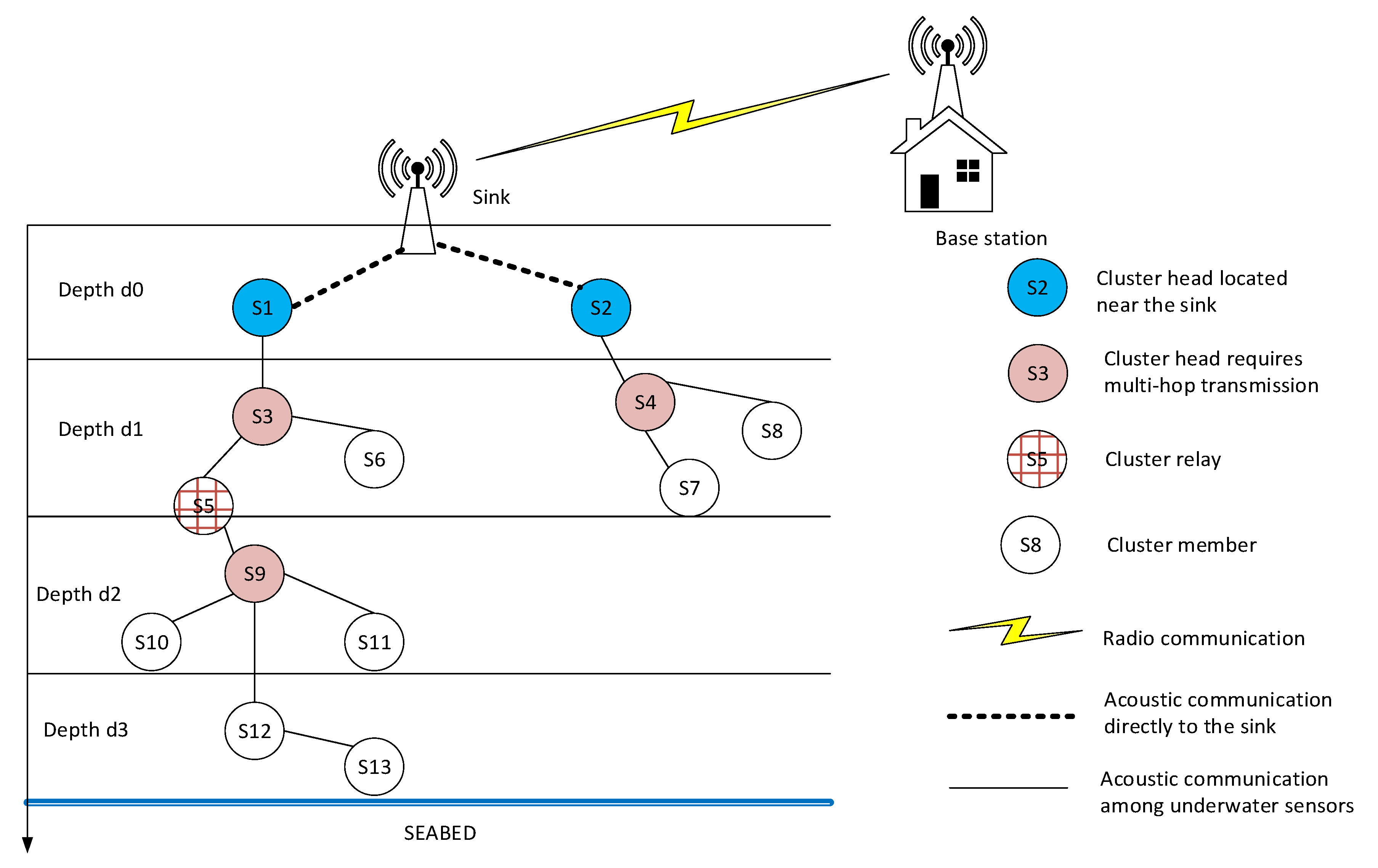
- The underwater sensor nodes update the routing path and cluster to connect to the sink without disruption. The sink collects data, which are then transmitted to an onshore gateway.
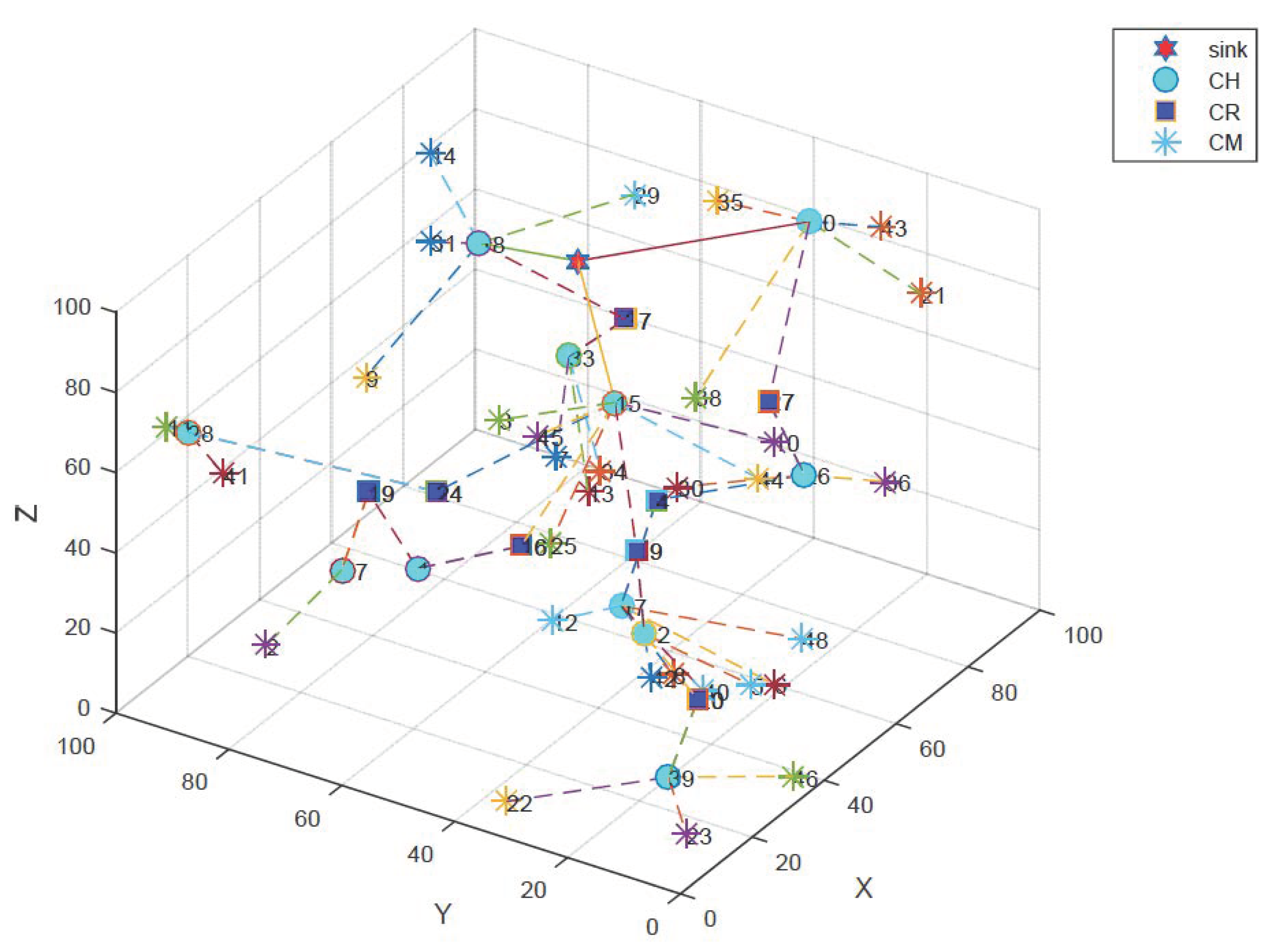
- Three types of node: cluster head (CH), cluster member (CM), and cluster relay (CR). If a node is the cluster head, the role of the node can be an aggregation node. If a node is the cluster relay, the node forwards data from two clusters at two depth levels. Otherwise, nodes are designated as a cluster member and only send data to the cluster head.
- The underwater sensors calculate the weight according to the node’s depth and residual energy to elect to become the cluster head.
- The routing protocol takes into account the number of cluster members and load balancing parameters so that the node selects the best route to the destination.
2. Related Works
3. Energy-Efficient Clustering Multi-Hop Routing Protocol
3.1. Network Model
- The node knows its location and the location of the sink node upon first deployment.
- Nodes can become either the cluster head, cluster relay, or cluster member.
- The cluster head is rotated between the sensor nodes to conserve energy.
- Each layer has several clusters, each cluster having one cluster head and a cluster member. For example, node S3 is the cluster head at depth D1 and node S9 is the cluster head at depth D2.
- Nodes located at the border of two layers can adopt the role of cluster relay, which forwards the data of the deeper layer to the sink. For example, node S5 becomes a cluster relay which forwards the data of cluster S9 to cluster S3 and then transmits to the sink node.
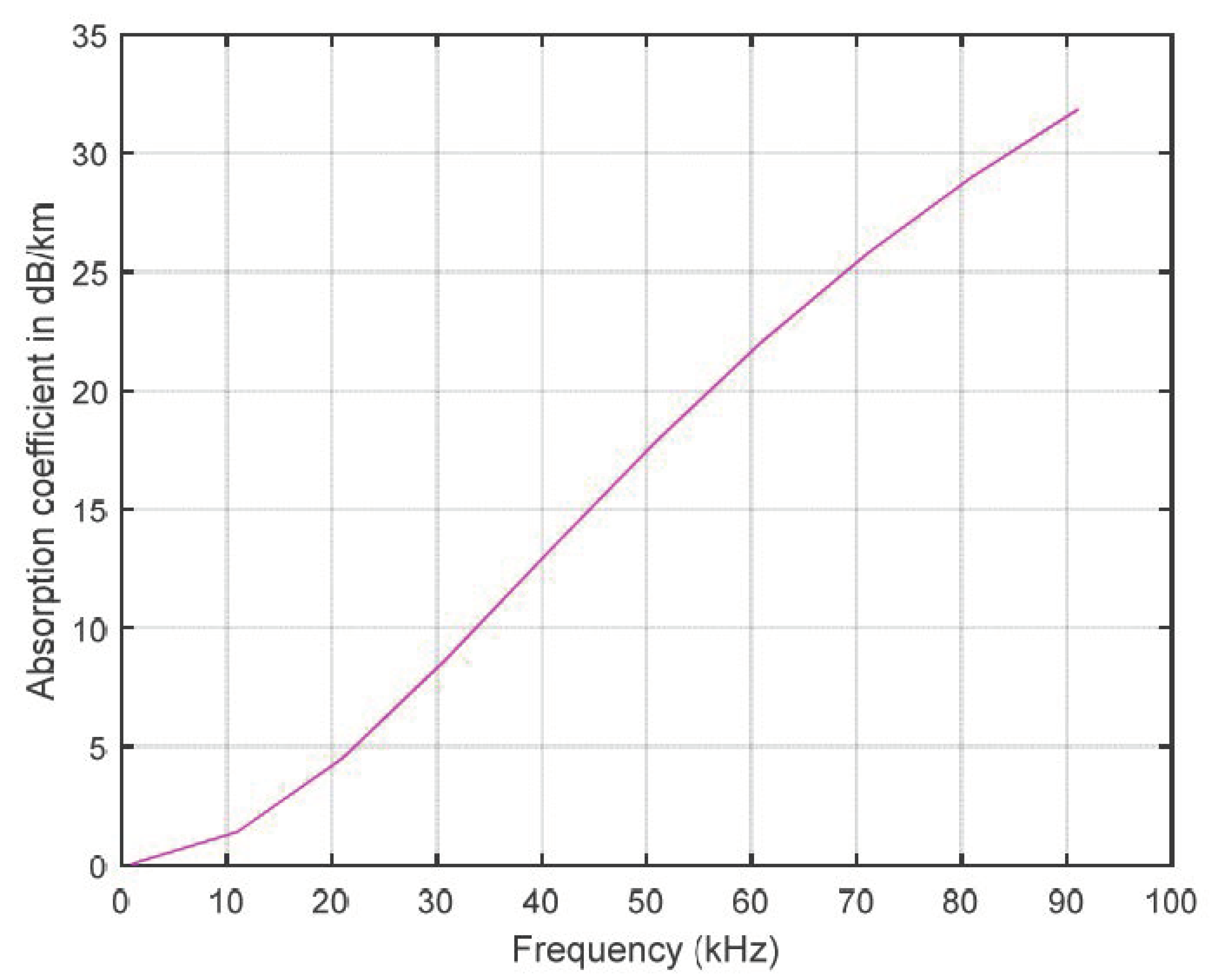
- Node S13 located at the seabed takes the multi-hop routing path to the sink via clusters of S12–S9–S5–S3–S1–sink. The propagation loss model of the underwater acoustic channel is assumed, as in [3]. Since the signals propagate vertically, attenuation increases, which is proportional to increasing distance. The transmission loss is calculated as follows:
3.2. Energy-Efficient Clustering Multi-Hop Routing Protocol
| Algorithm 1. Energy-Efficient Clustering Multi-Hop Routing Protocol. |
| Input: node ID, position, initial energy, generated packets Output: cluster {cluster ID, CH, CM}, CRs
|
3.3. Qualitative Comparison of Clustering Protocols
4. Performance Evaluation
4.1. Simulation Environment
4.2. Simulation Results
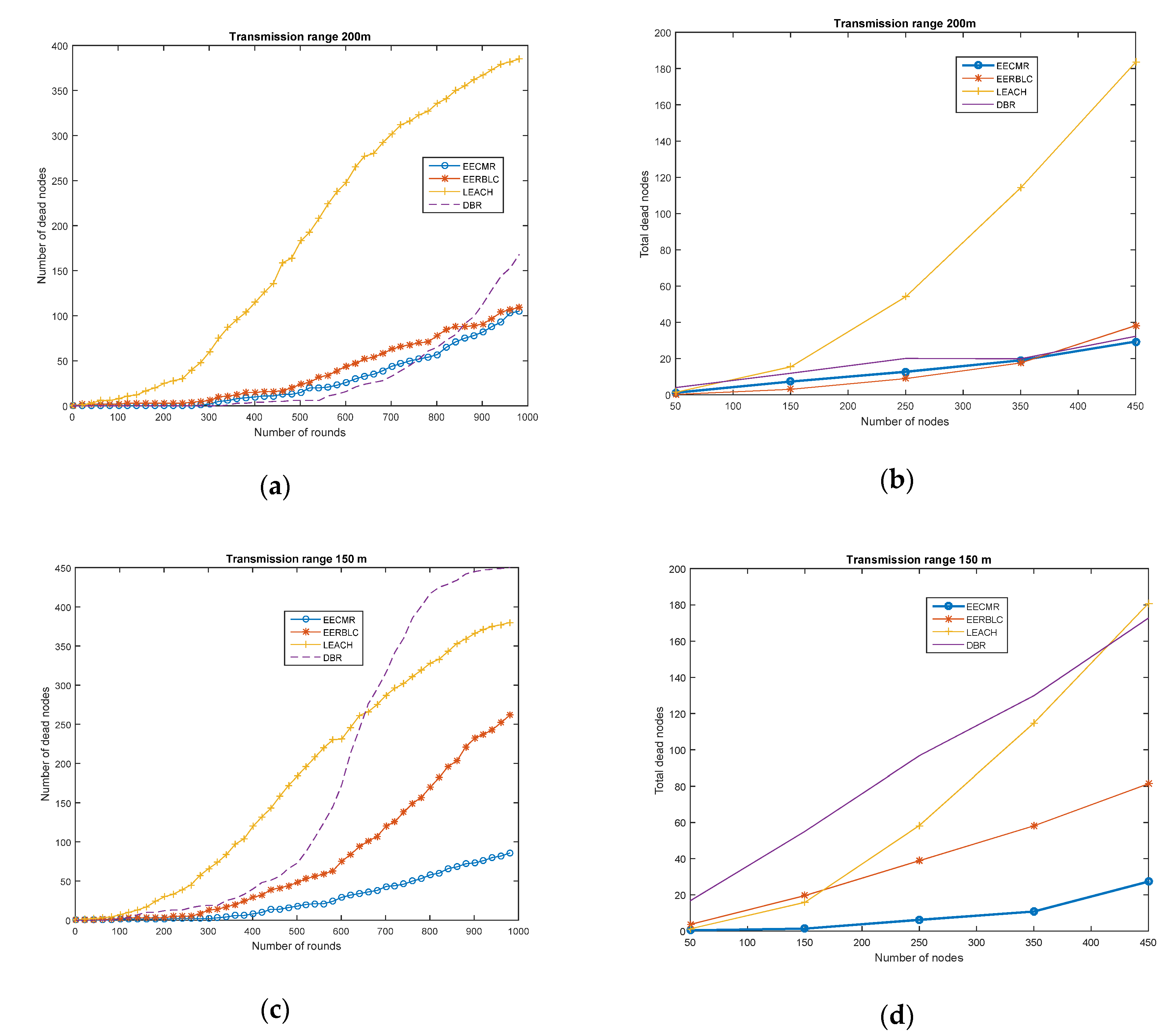
4.2.1. Network Lifetime
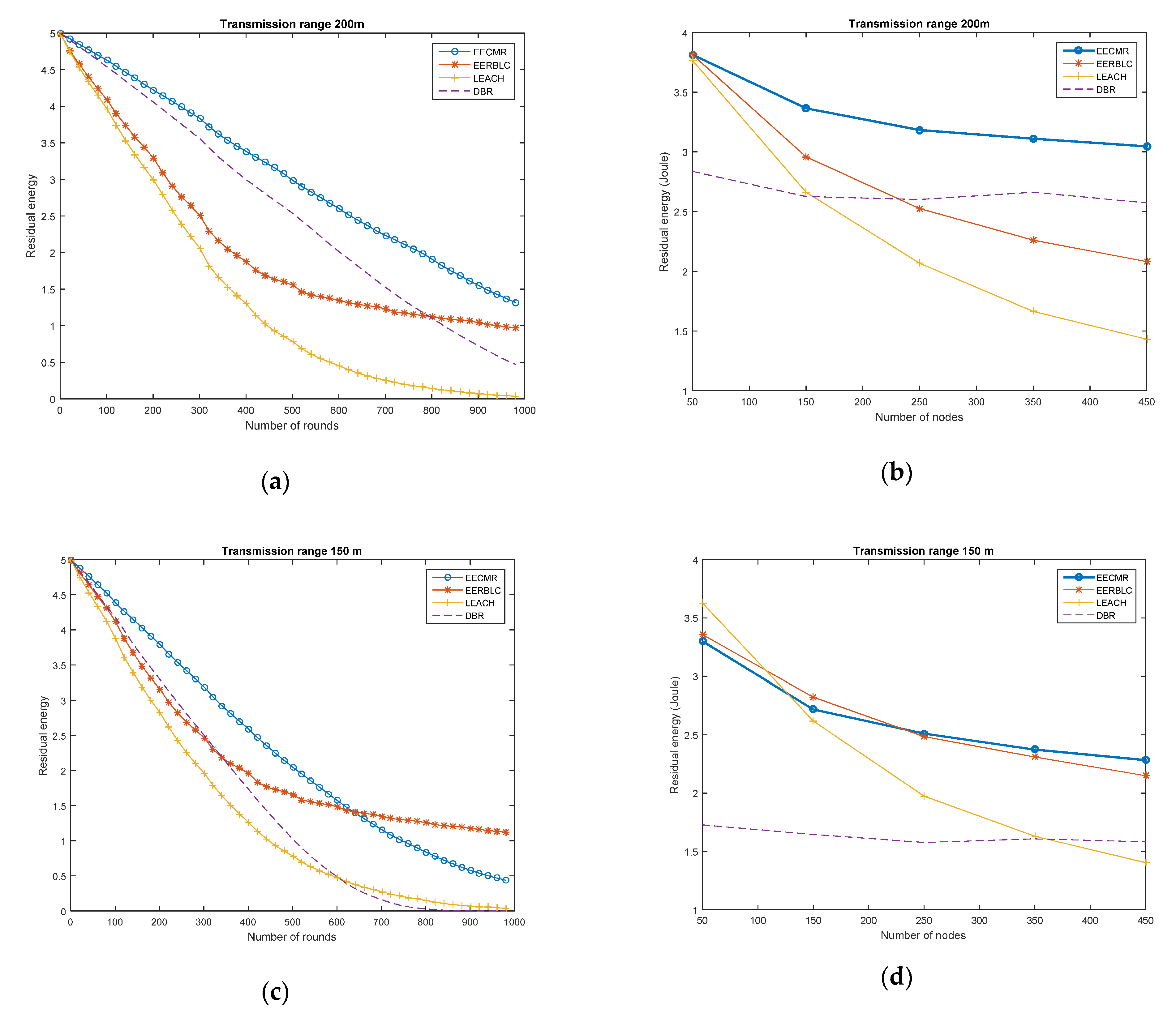
4.2.2. Residual Energy at the Nodes
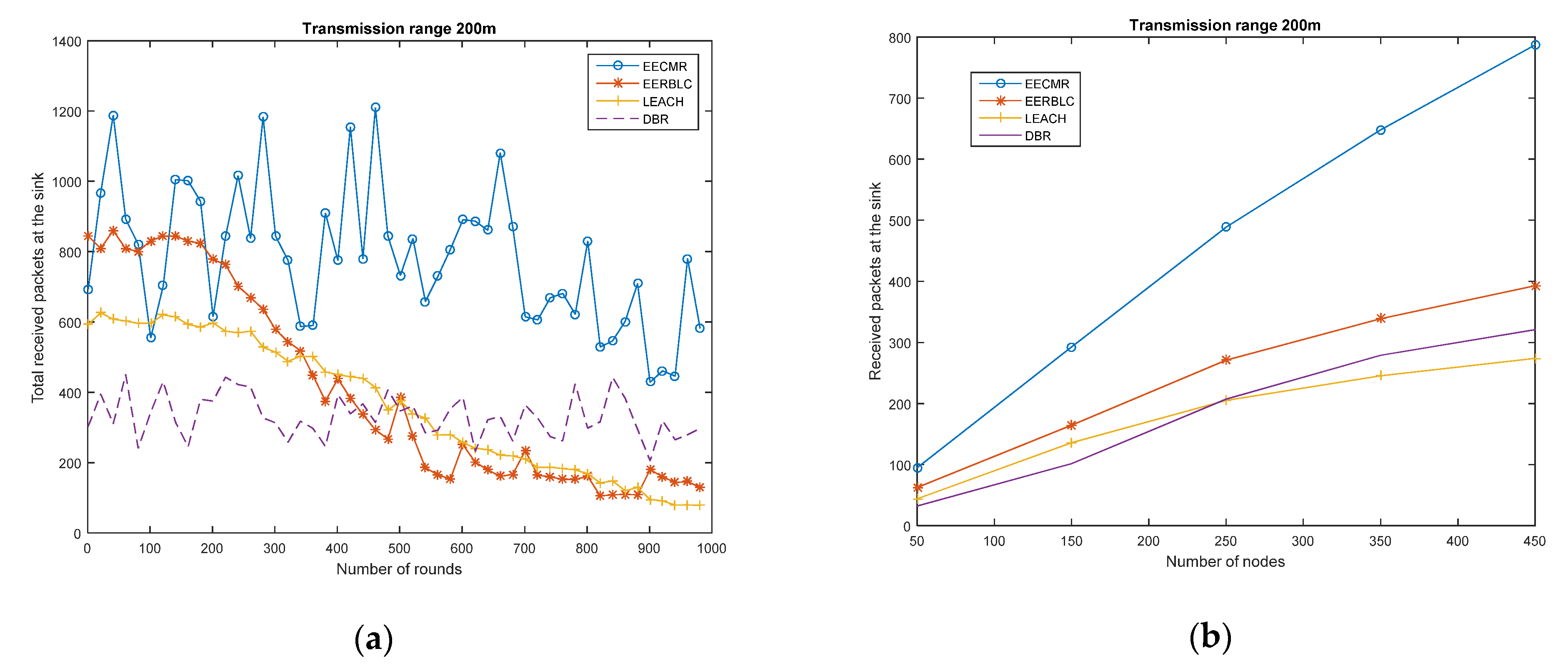
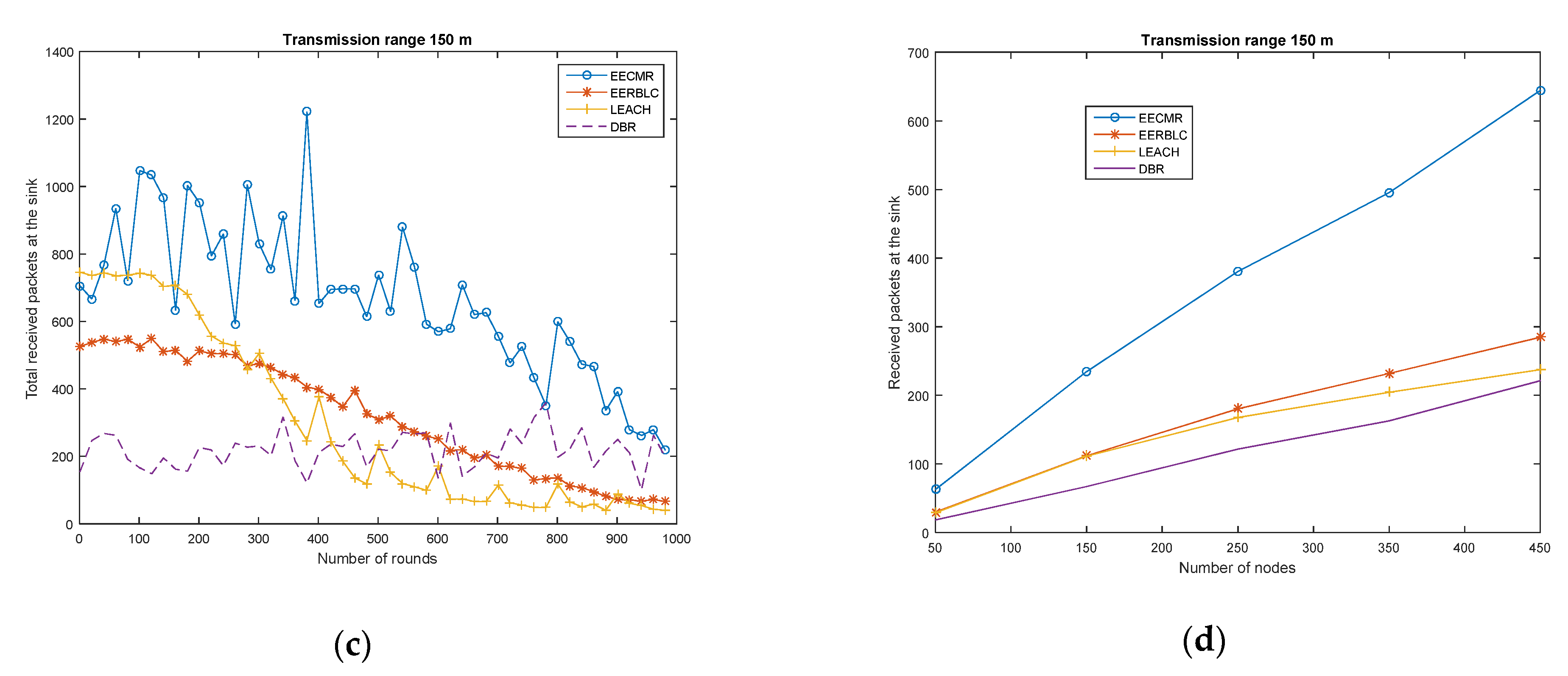
4.2.3. Received Packets at the Sink Node
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Felemban, E.; Shaikh, F.K.; Qureshi, U.M.; Sheikh, A.A.; Qaisar, S.B. Underwater sensor network applications: A comprehensive survey. Int. J. Distrib. Sens. Netw. 2015, 11, 896832. [Google Scholar] [CrossRef]
- Awan, K.M.; Shah, P.A.; Iqbal, K.; Gillani, S.; Ahmad, W.; Nam, Y. Underwater wireless sensor networks: A review of recent issues and challenges. Wirel. Commun. Mob. Comput. 2019, 2019, 6470359. [Google Scholar] [CrossRef]
- Jouhari, M.; Ibrahimi, K.; Tembine, H.; Ben-Othman, J. Underwater wireless sensor networks: A survey on enabling technologies, localization protocols, and internet of underwater things. IEEE Access 2019, 7, 96879–96899. [Google Scholar] [CrossRef]
- Xu, G.; Shen, W.; Wang, X. Applications of wireless sensor networks in marine environment monitoring: A survey. Sensors 2014, 14, 16932–16954. [Google Scholar] [CrossRef] [PubMed]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: Research challenges. Ad Hoc Netw. 2005, 3, 257–279. [Google Scholar] [CrossRef]
- Heinzelman, W.R.; Chandrakasan, A.; Balakrishnan, H. Energy-efficient communication protocol for wireless microsensor networks. In Proceedings of the 33rd Annual Hawaii International Conference on System Sciences, Maui, HI, USA, 4–7 January 2000; p. 10. [Google Scholar]
- Sandeep, D.N.; Kumar, V. Review on clustering, coverage and connectivity in underwater wireless sensor networks: A communication techniques perspective. IEEE Access 2017, 5, 11176–11199. [Google Scholar] [CrossRef]
- Yan, H.; Shi, Z.J.; Cui, J.H. DBR: Depth-based routing for underwater sensor networks. In Proceedings of the International Conference on Research in Networking, Dalian, China, 12–17 October 2008; Springer: Berlin/Heidelberg, Germany, May 2008; pp. 72–86. [Google Scholar]
- Khan, A.; Ali, I.; Ghani, A.; Khan, N.; Alsaqer, M.; Rahman, A.U.; Mahmood, H. Routing protocols for underwater wireless sensor networks: Taxonomy, research challenges, routing strategies and future directions. Sensors 2018, 18, 1619. [Google Scholar] [CrossRef] [PubMed]
- Zhu, F.; Wei, J. An energy efficient routing protocol based on layers and unequal clusters in underwater wireless sensor networks. J. Sens. 2018, 2018, 5835730. [Google Scholar] [CrossRef]
- Li, Y.; Wang, Y.; Ju, Y.; He, R. Energy efficient cluster formulation protocols in clustered underwater acoustic sensor networks. In Proceedings of the 2014 IEEE 7th International Conference on Biomedical Engineering and Informatics, Dalian, China, 14–16 October 2014; pp. 923–928. [Google Scholar]
- Durrani, M.Y.; Tariq, R.; Aadil, F.; Maqsood, M.; Nam, Y.; Muhammad, K. Adaptive node clustering technique for smart ocean under water sensor network (SOSNET). Sensors 2019, 19, 1145. [Google Scholar] [CrossRef] [PubMed]
- Khan, W.; Wang, H.; Anwar, M.S.; Ayaz, M.; Ahmad, S.; Ullah, I. A Multi-Layer Cluster Based Energy Efficient Routing Scheme for UWSNs. IEEE Access 2019, 7, 77398–77410. [Google Scholar] [CrossRef]
- Hong, Z.; Pan, X.; Chen, P.; Su, X.; Wang, N.; Lu, W. A topology control with energy balance in underwater wireless sensor networks for IoT-based application. Sensors 2018, 18, 2306. [Google Scholar] [CrossRef] [PubMed]
- Yu, W.; Chen, Y.; Wan, L.; Zhang, X.; Zhu, P.; Xu, X. An Energy Optimization Clustering Scheme for Multi-Hop Underwater Acoustic Cooperative Sensor Networks. IEEE Access 2020, 8, 89171–89184. [Google Scholar] [CrossRef]
- Hou, R.; He, L.; Hu, S.; Luo, J. Energy-balanced unequal layering clustering in underwater acoustic sensor networks. IEEE Access 2018, 6, 39685–39691. [Google Scholar] [CrossRef]
- Wang, M.; Chen, Y.; Sun, X.; Xiao, F.; Xu, X. Node Energy Consumption Balanced Multi-Hop Transmission for Underwater Acoustic Sensor Networks Based on Clustering Algorithm. IEEE Access 2020, 8, 191231–191241. [Google Scholar] [CrossRef]
- Khan, M.T.R.; Ahmed, S.H.; Kim, D. AUV-Aided Energy-Efficient Clustering in the Internet of Underwater Things. IEEE Trans. Green Commun. Netw. 2019, 3, 1132–1141. [Google Scholar] [CrossRef]
- Ibrahim, D.M.; Eltobely, T.E.; Fahmy, M.M.; Sallam, E.A. Enhancing the vector-based forwarding routing protocol for underwater wireless sensor networks: A clustering approach. In Proceedings of the International Conference on Wireless and Mobile Communications, Seville, Spain, 17–22 June 2014; pp. 98–104. [Google Scholar]
- Gopi, S.; Govindan, K.; Chander, D.; Desai, U.B.; Merchant, S.N. E-PULRP: Energy optimized path unaware layered routing protocol for underwater sensor networks. IEEE Trans. Wirel. Commun. 2010, 9, 3391–3401. [Google Scholar] [CrossRef]
- Khasawneh, A.; Latiff, M.S.B.A.; Kaiwartya, O.; Chizari, H. Next forwarding node selection in underwater wireless sensor networks (UWSNs): Techniques and challenges. Information 2017, 8, 3. [Google Scholar] [CrossRef]
- Domingo, M.C. Overview of channel models for underwater wireless communication networks. Phys. Commun. 2008, 1, 163–182. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notations | Description |
|---|---|
| N | Number of nodes |
| S0 | Sink node |
| Si | Sensor node index i, 1 ≤ i ≤ N |
| L × L × L | Three-dimensional network deployment |
| Tx | Transmission range of node |
| ndepth | Number of layers |
| Nei(Si) | List of neighbors of node Si |
| Dm | Depth layer index m, 0 ≤ m ≤ ndepth |
| Lst(Dm) | List of sensor nodes at depth Dm |
| TL | Transmission loss of acoustic signal |
| αTL(f) | Absorption coefficient for the medium |
| Wi | Weight of sensor node Si |
| d(i,j) | Distance between node Si and node Sj |
| d(i,S0) | Distance between node Si and the sink |
| Protocols | Parameters to Select the Cluster Head | Network | Assisted Node | Energy |
|---|---|---|---|---|
| LEACH [5] | Random value | 2D | None | Yes |
| DBR [7] | Depth-based, holding time of packets | 3D | None | Yes |
| EERBLC [9] | Residual energy, random value, number of layers | 3D | Two sinks | Yes |
| C-LEACH [10] | Distance, location of the node | 2D | Control node | Yes |
| MLCEE [12] | Fitness value, small Hop_ID and low number of layers | 3D | Two sinks | Yes |
| TCEB [13] | Residual energy, number of neighbors, path loss | 2D | None | Yes |
| EOCA [14] | Number of neighbor nodes, residual energy, distance to the sink node | 2D | None | Yes |
| EULC [15] | Residual energy, distance to the sink node | 3D | None | Yes |
| S-BEAR [16] | Distance to the sink | 2D | None | Yes |
| CVBF [18] | Residual energy, vector-based routing | 3D | Virtual sink | Yes |
| EECMR | Residual energy, duration of the cluster head, distance to the sink | 3D | Cluster relay | Yes |
| Simulation Parameters | Value |
|---|---|
| Network deployment area | 500 × 500 × 500 m |
| Number of nodes | 50 to 450 |
| Generated packets at each node | 1 or 2 data packets |
| Transmission range | 150 m, 200 m |
| Acoustic frequency | 30 kHz |
| Transmit power | 2 W |
| Receive power | 0.1 W |
| Initial node energy | 5 Joules |
| Number of sink nodes | 1 |
| Data packet size | 200 bits |
| Rounds | 1000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, N.-T.; Le, T.T.T.; Nguyen, H.-H.; Voznak, M. Energy-Efficient Clustering Multi-Hop Routing Protocol in a UWSN. Sensors 2021, 21, 627. https://doi.org/10.3390/s21020627
Nguyen N-T, Le TTT, Nguyen H-H, Voznak M. Energy-Efficient Clustering Multi-Hop Routing Protocol in a UWSN. Sensors. 2021; 21(2):627. https://doi.org/10.3390/s21020627
Chicago/Turabian StyleNguyen, Nhat-Tien, Thien T. T. Le, Huy-Hung Nguyen, and Miroslav Voznak. 2021. "Energy-Efficient Clustering Multi-Hop Routing Protocol in a UWSN" Sensors 21, no. 2: 627. https://doi.org/10.3390/s21020627
APA StyleNguyen, N.-T., Le, T. T. T., Nguyen, H.-H., & Voznak, M. (2021). Energy-Efficient Clustering Multi-Hop Routing Protocol in a UWSN. Sensors, 21(2), 627. https://doi.org/10.3390/s21020627