1. Introduction
An optical system with multiple arbitrary masks placed at arbitrary positions is the core scheme of a variety of optical systems. A scheme where the masks are random phase screens (RPSs) is an excellent model for the analysis, simulation, and interpretation of optical systems that involve optical scattering due to refractive index fluctuations [
1,
2,
3,
4]. RPS models were first introduced to represent the fading of radio waves due to fluctuations in the ionosphere layers, but were later found to be useful for modeling various other wave scattering phenomena, including optical scattering. They have been extensively used to analyze atmospheric light propagation, coherent imaging, speckle metrology, and optical scintillations, amongst others [
5].
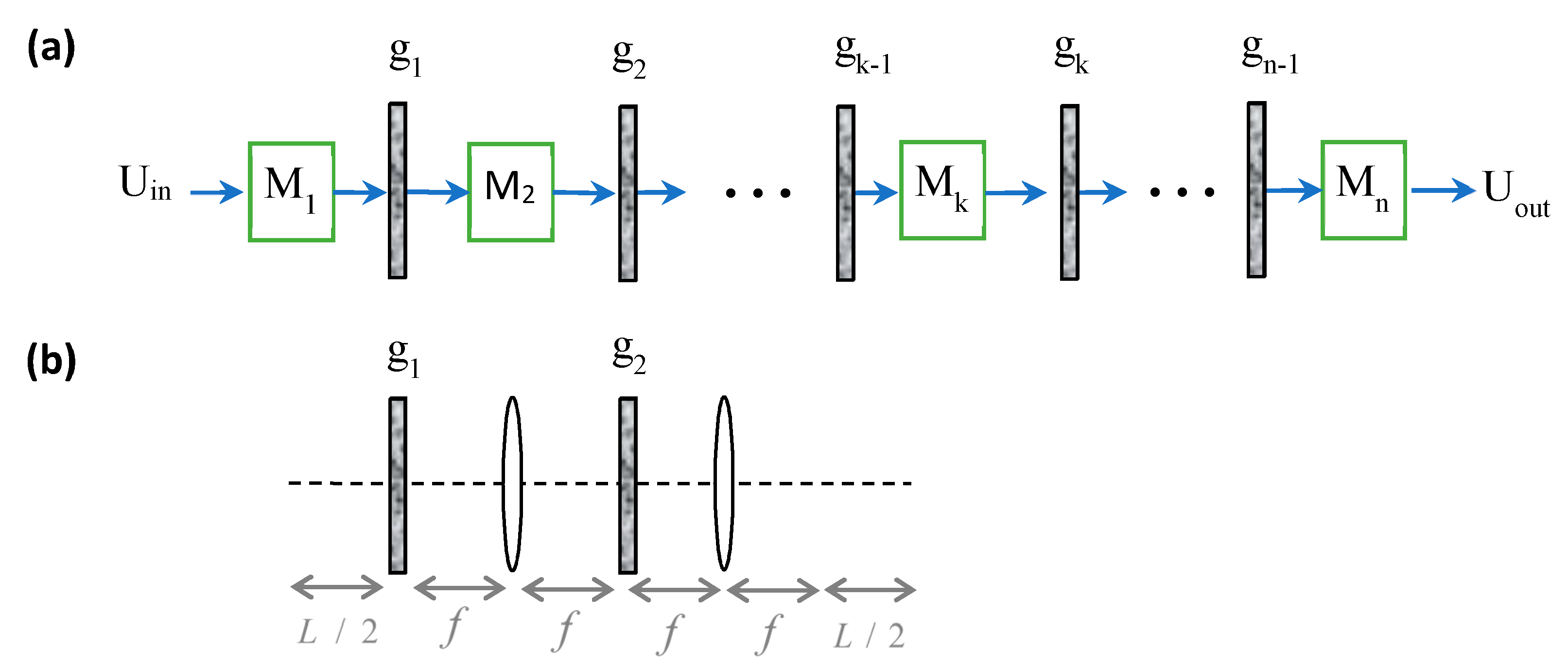
In
Figure 1a, a scheme of a paraxial optical system is illustrated, where there are
sub paraxial systems,
, and
masks,
, between them, while
and
denote the input field and output field, respectively. For example, in atmospheric propagation of light, the sub-systems might be free-space propagation combined with an optical scaling system where the masks are RPSs [
4,
6].
Figure 1b is a specific case of
Figure 1a for two masks and three sub-systems, showing a paraxial system composed of intermittent lenses of focal length
and free-space propagation sections of length
with two masks in between. By choosing the masks as RPSs with properties appropriate for the relevant medium, this figure represents a model [
5] for the analysis of the optical memory effect of scattered light in random media [
7]. We use
Figure 1b as a case study throughout this paper. The basic principle behind the optical memory has its roots in astronomy and was adapted to other fields using well-established astronomic techniques [
5,
8]. Some other advanced optical memory effect applications might include imaging through the atmosphere, dense fog, or biological tissues [
9].
The first order paraxial sub-systems between the masks in
Figure 1a might be any combination of beam propagation forms with ideal optical elements between the stages, such as ideal thin lenses, ideal graded-index fiber, etc. Such lenses and fibers are commonly used for scaling [
4], imaging [
10], and spatial filtering [
5] between the RPSs in the system. For example, in
Figure 1b,
is a free-space propagation section of length
,
is an ideal
focal length system, and
is an ideal
focal length system with an additional free-space propagation section of length
. Thus, we define the optical system without the masks as the “ideal core” optical system. The model may also contain a combination of RSPs with random absorbing screens.
Generally, masks in optical systems have non shift-invariant (SI) behavior; thus, the individual effect of each mask on the output cannot be entirely separated. However, we will show in this paper that the effect of each RPS in the system in
Figure 1a can be fully separated under certain conditions. This separation facilitates the analysis of various systems, and helps to understand the relation between the input and the output. Furthermore, it enables separating the influence of each of the system’s parameters and enables modeling more complex systems, such as random media with varying behavior along the system path.
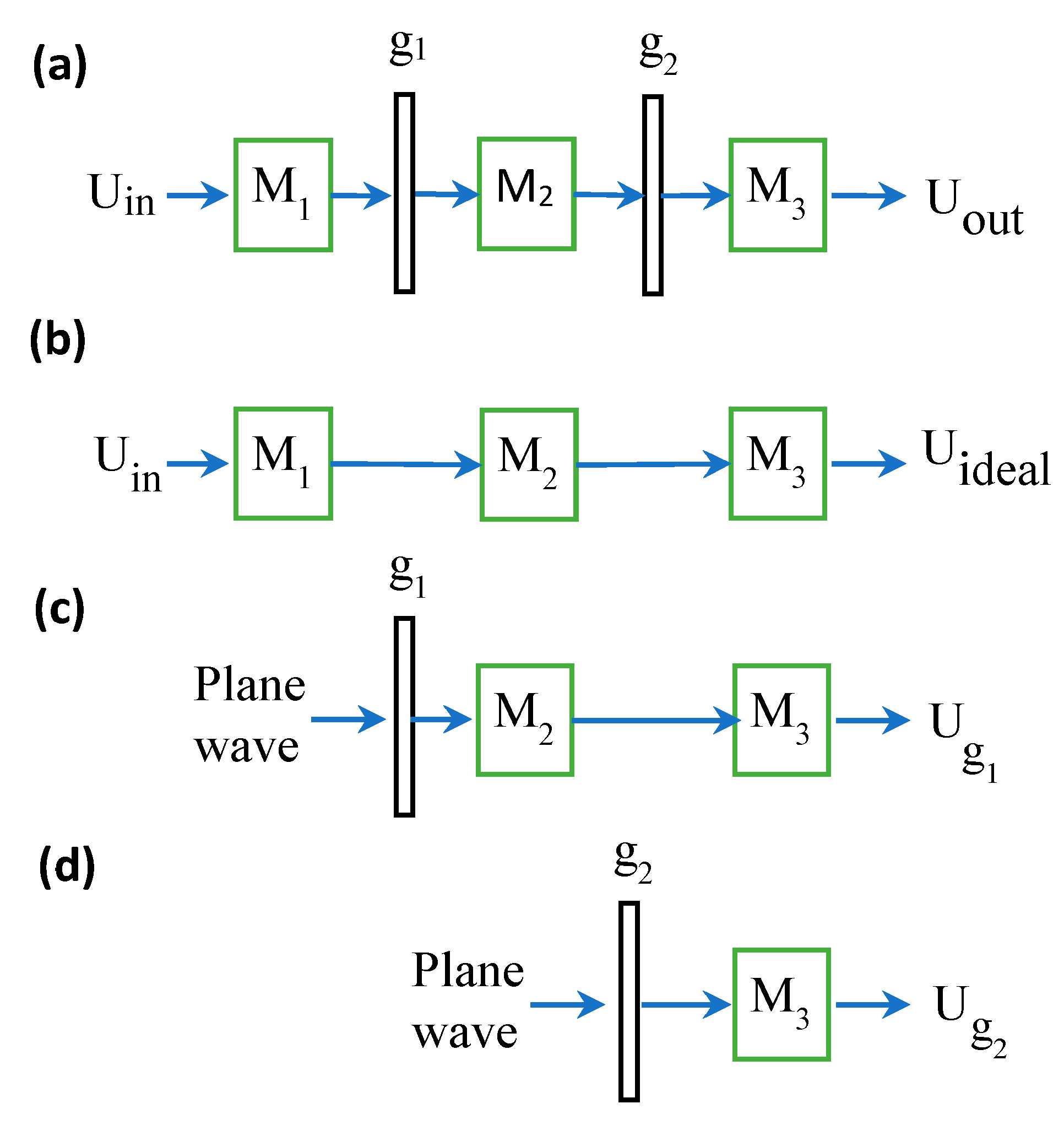
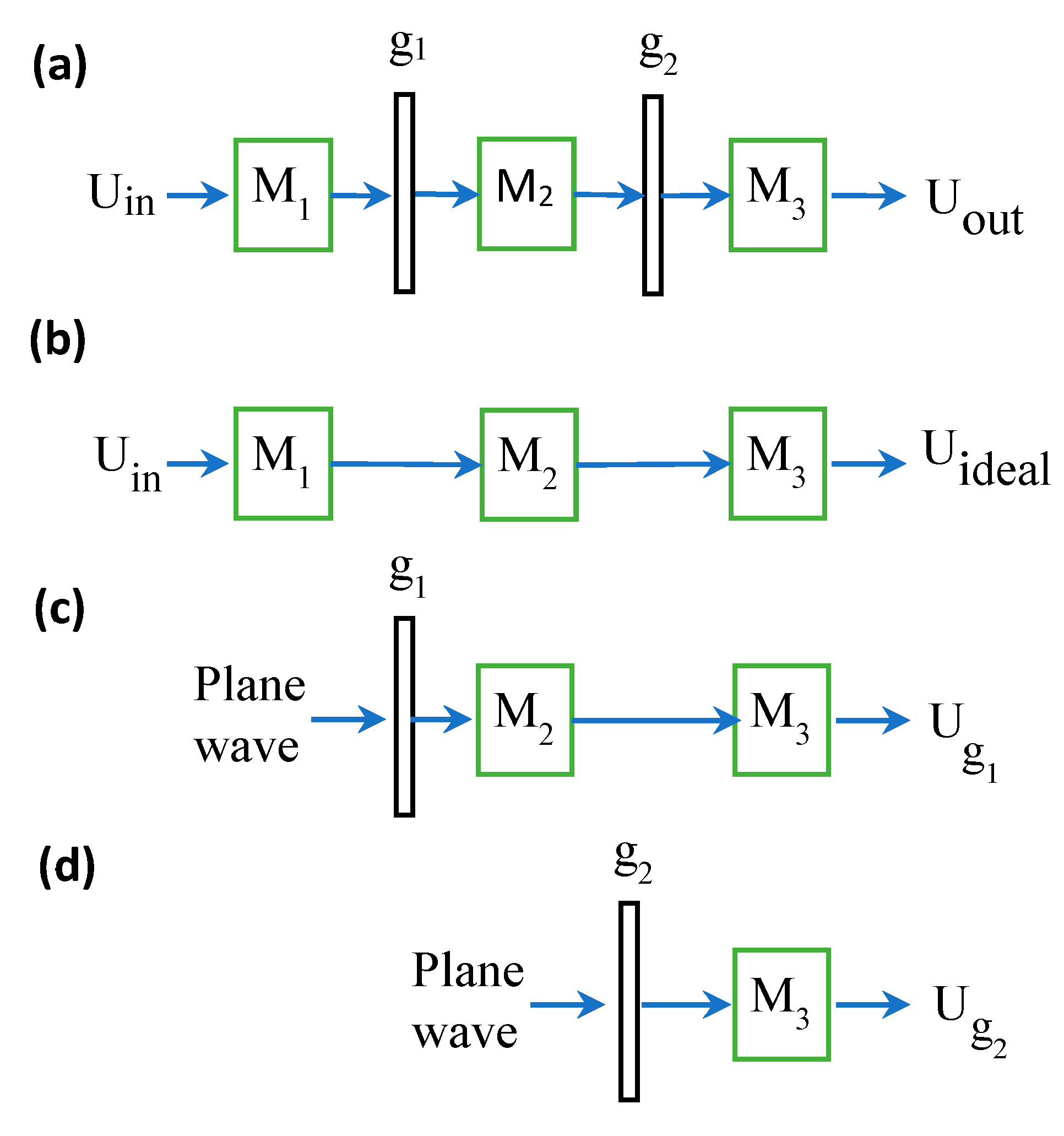
This paper is structured as follows. In
Section 2, we investigate the general case of two RSPs, and we demonstrate our approach for the specific case study illustrated in
Figure 1b. For completeness of the analysis and for the purpose of comparison, we first review the case of a deterministic mask (
Section 2.1), and then we develop the main result of the RPS case and demonstrate it by simulation (
Section 2.2). In
Section 3, we generalize the approach to the multiple RPS case and its applications.
Section 4 presents a discussion and conclusions.
3. Generalization for Multiple RPSs
We may generalize the former equations for the system with multiple RPSs shown in
Figure 1a. Consider a paraxial system with
sub-systems,
, and with
RPSs
between the sub-systems. Then, (2) is generalized to
where
is the
th mask and
originates from the projected ABCD ray transfer matrix of the cascade ideal core sub-systems from the
position to the output plane.
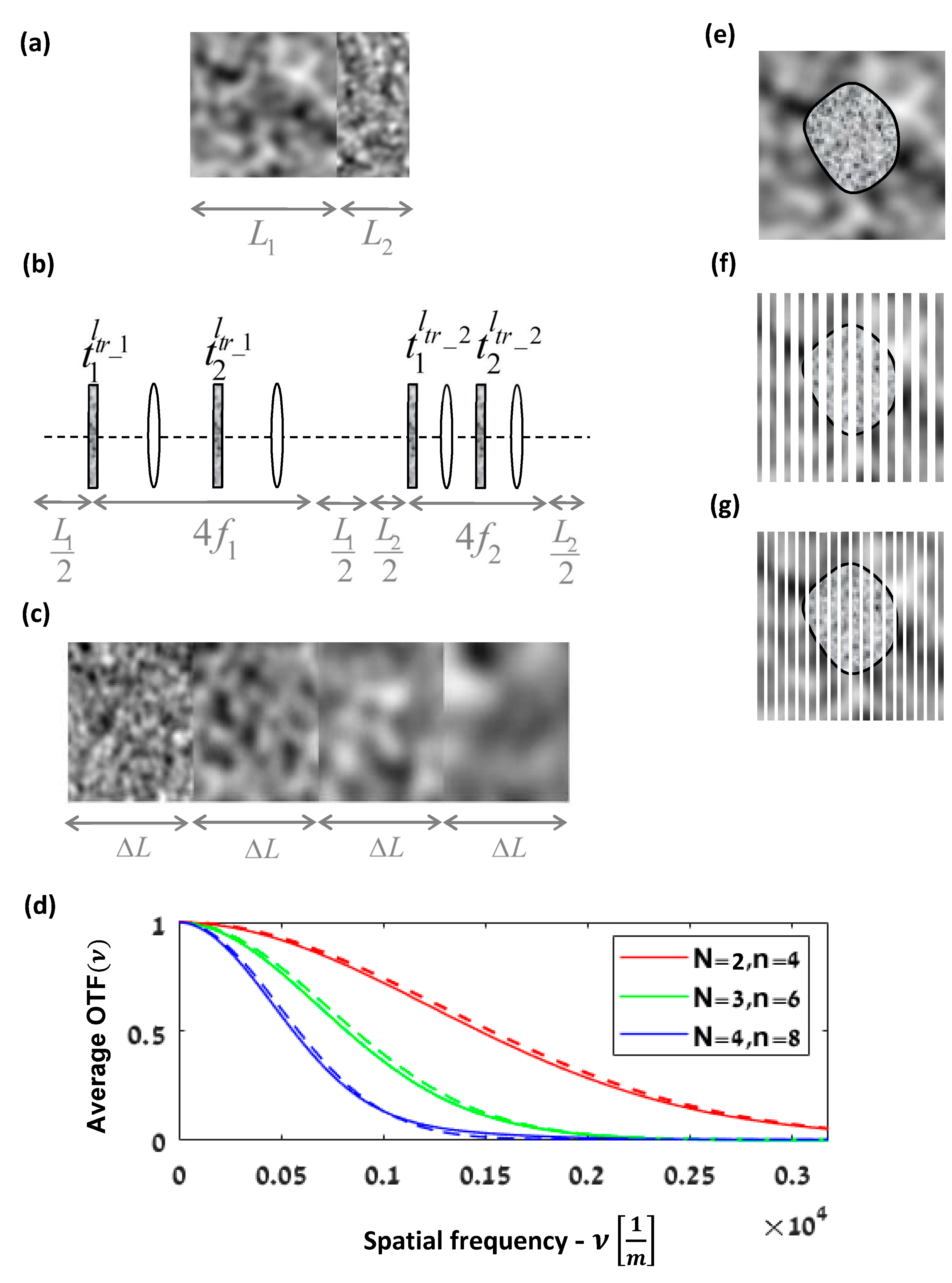
This generalization is useful for many cases. For example,
Figure 4a can describe the system model of two adjacent random media with different transport mean free paths. Such a combination of random media is modeled by the system shown in
Figure 4b, consisting of a cascade of two systems, as seen in
Figure 1b, each with appropriate parameters. The specific properties of each medium are represented by different
values of each Gaussian RPS and its appropriate
and
. In
Figure 4b, the RSPs of the first medium are denoted
and
, with the parameters
, and similarly for the second medium; the notations are
.
Although there are now four masks, the overall APSF is still a convolution chain of the effect of each APSF medium, which is one of the advantages of Equation (8). Consequently, for example, if we change the value of
of only one medium, the APSF of only this medium is changed. Similarly, suppose we add a third medium
before the two media in
Figure 4a; in this case, the new overall APSF
overall is just a convolution of the overall APSF
two of the previous two media with the APSF
third of the third medium, i.e., APSF
overall = APSF
third * APSF
two. The average effect of each RPS depends on its position in the system in accordance with the scaling factor of the AC. Thus, if we change the order of the two media or their length in
Figure 4a, the effect of each RPS is changed only by scaling.
Another useful case is where the random medium properties change along the system path, as is common in vertical atmospheric propagation or in any other scattering scenario that involves changes in the environmental conditions, such as a temperature or pressure gradient. For such a change, the entire system might be seen as cascading of an infinite number of systems of
Figure 1b, with gradual changes in their RPS properties. Consider, for example,
adjacent media as described in
Figure 4c. Each medium is represented by the case study model in
Figure 1b. The RSPs of each medium are Gaussian, with different
according to the medium position. Because each medium is represented by two masks, there are
masks and
sub-systems between them. The value of
for each two masks of the same medium is identical. Considering a gradually linear increase in
by a factor of
, we obtain
, where
denotes the
of the K_th medium. Each medium has two scaling parameters that depend on their position in the whole system. Assuming all the media have the same length
, and since we may choose the free parameter
to be
, as in
Section 2.2, we obtain:
,
,
,
,..,
,
. We denote
and
as the variance of the first RPS
and the second RPS
of the same
_th medium, accordingly, where
and both variances are a function of the same
. Thus, using Equation (8), the overall AOTF is obtained by
Please note that the third equality in Equation (9) is the general AOTF for any N media, each one with its own
, length
, and projection parameters. Only the last line is the private case for a gradual linear decrease in
by a factor
and with the same length
(
Figure 4c). The left summation term in the exponent of the last expression could be considered to be a factor for the average effective
of the whole system [
26]. Please note that for our case study model (
Figure 1b), the dependence of the scattering on the wavelength is assimilated into
by the
value, where
originates from Mie theory [
7] and is fundamentally a function of
. Thus, the dependence of the AOTF on
is also obtained through
.
Figure 4d shows the AOTF of the particular case where the medium in
Figure 3a is replaced by the gradual medium change in
Figure 4c. The graphs show the cases of two, three, and four cascading media, i.e.,
and
, where
n is the number of the masks. For each case of cascaded
N media, the sensor in
Figure 3a was moved to the new imaging plane. We chose each medium length in
Figure 4c to be the same as for the value of
Figure 3a. The transport mean free path decreases from medium to medium by a factor of
. As it can be seen, the graph shows a good match between the simulations and the analytical expression for the multiple masks in Equation (9).
Figure 4a–c are examples for multilayer applications of random media with different properties, which might be analyzed by Equation (8). In the analysis of atmospheric light propagation, this may be relevant when the source or the sensor get closer to or further from each other on the same line of sight. In a biological application, this may be relevant, for example, for evaluating the change in the optical propagation through a multi-layered tissue after removing tissue layers during surgery or due to stretching of the tissue.
In the last examples, we use our case study (
Figure 1b) with two RSPs, where the need for multiple RSPs is due to the addition of different media to the system or to a change in the medium properties along the path (
Figure 4c) of the same model (
Figure 1b). However, multiple RSPs may also be needed for describing other scattering models [
1,
2,
3,
6]; thus, the APSF of other multiple RSP models might also be described by Equation (8). For example, it was shown that at least two RPSs are needed to represent a turbulent medium (Ch.9 in [
27]). Using only two RSPs enables creating a lab simulator for atmospheric light propagation through two spatial light modulators [
4]. However, for the investigation of strong turbulence, a large number of RPSs is needed [
6]. Similarly, multiple RSPs are needed to analyze the PSF in the transition regime from ballistic to diffusive light transport [
3].
Another valuable application of Equation (8) could be to account for arbitrary shapes of the scattering media. For example, consider the case of a random medium with a known mantle embedded in another random medium (
Figure 4e). The multislice method (a.k.a. the beam propagation method) models a three-dimensional object as a series of thin two-dimensional slices separated by homogeneous media. The propagation of the light is analyzed from slice to slice [
28]. Therefore, we may approximate the two media as a stack of many RPSs with free-space propagation between them [
29]. As the number of slices increases and the distance between them decreases, the approximation is better (
Figure 4f). Each slice can be modeled by a combination of three RPSs. One belongs to the inner medium and the others to the environment. If the
of each RPS is known, as well as its statistical AC, then we may use the model. If the scattering of the environment is much smaller than the cell, then we may approximate each slice as a superposition of only two RPSs, one of the environment and the other of the cell.
One of the main technical challenges of the multislice approach is to determine the slice width to be used in the analysis. The common approach is to compute the result with a specific depth resolution, as in
Figure 4f, and then, if required, refining by recomputing it with a higher resolution, as depicted in
Figure 4g. The refinement process might need to be repeated until convergence to a stable output. In the conventional way, at each refinement step, the output needs to be calculated. However, using our model for computing
, the effect of each slice might be separated from any other slice. Thus, only the additional slices would need to be computed, and their effect is added to the previous computation by the convolution operator. Therefore, the model is effective in the sense of computational efficiency.
4. Discussion and Conclusions
The output complex field amplitude of an optical system is formulated in Equation (1) in terms of convolutions of a maskless system with a scaled FT for each mask, with corresponding quadratic phase multiplications. This formulation facilitates separating the effects on the output field of all the masks from the output core system without masks. It also highlights each mask’s influence on the output [
18]; however, the effect of each mask on the output cannot be entirely separated from the core system due to the quadratic phase multiplications.
In this paper, we analyze the case where the masks are RPSs. For RPSs, only the statistical properties can be evaluated; thus, we examined the average effect. An elegant and comprehensive approach to analyzing the propagation of the first and second order statistics through the system is by examining the Wigner distribution (WD). For example, in [
5], we applied such an approach for the system in
Figure 1b. The WD analysis [
5] of
cannot reveal the effect of each individual mask due to the non-SI nature of the system. However, the statistical averaging mechanism of APSF eliminates the quadratic phase terms in Equation (1) and separates the statistical effect of each mask. We have developed analytical expressions, and validated with simulations that this mechanism enables separating the statistical effect of each RPS from that of any other RPS and from the core system.
We conclude by outlining a remarkable difference between systems with deterministic masks and systems with RPS masks. For deterministic masks, the main reason for the SI of is the masks’ positions. This affects the quadratic phase factors between the convolutions in Equation (1), and, even if is generally a SI system, is a non-SI system. In contrast to deterministic mask systems, for the RPS system, the reason for the non-SI feature of the averaged output is the non-SI feature of and not the RPS positions.
The presented results are useful for exploring various optical systems with multiple-scattering media, and for cases when the random medium properties are not fixed [
30] and vary along the system path. The method applies to any paraxial core system and any cascaded system involving different medium properties. For example, the third equality in (9) is valid for any varying function in
along the path in
Figure 4c, and additional optical systems might be added before, between, and after the media. The method also applies for other models of scattered light in random medium analysis by RSPs, in addition to the specific model in
Figure 1b.
There are many different approaches to physically modeling a random medium [
1,
3,
7,
22,
29]. This paper has made no new contribution to the physical scattering model at the structural level. Rather, the contribution of this paper is at the system model level by separating the RSPs’ effects. We generalize the analysis of any paraxial system with deterministic masks to the case of RPSs. Our model applies to a general framework; it can handle any paraxial core system and any cascaded system of sub-systems with RPSs whose ACs are known. Any paraxial system is defined by the linear canonical transform (LCT) [
31,
32] and the model is valid for any RPS that is a wide-sense stationary (WSS) process. The generalized LCT convolution and the WSS process have many other application areas beside optics [
15,
16]. Therefore, the results are valid for any cascaded LCT sub-system with multiplication with WSS processes between the LCT sub-systems.



{kind=link}
{kind=link}
{kind=link}
{kind=link}