
Defect Imaging Enhancement through Optimized Shape Factors of the RAPID Algorithm Based on Guided Wave Beam Pattern Analysis



Abstract
1. Introduction
2. Theoretical Fundamentals
2.1. Lamb Wave Mode Verification
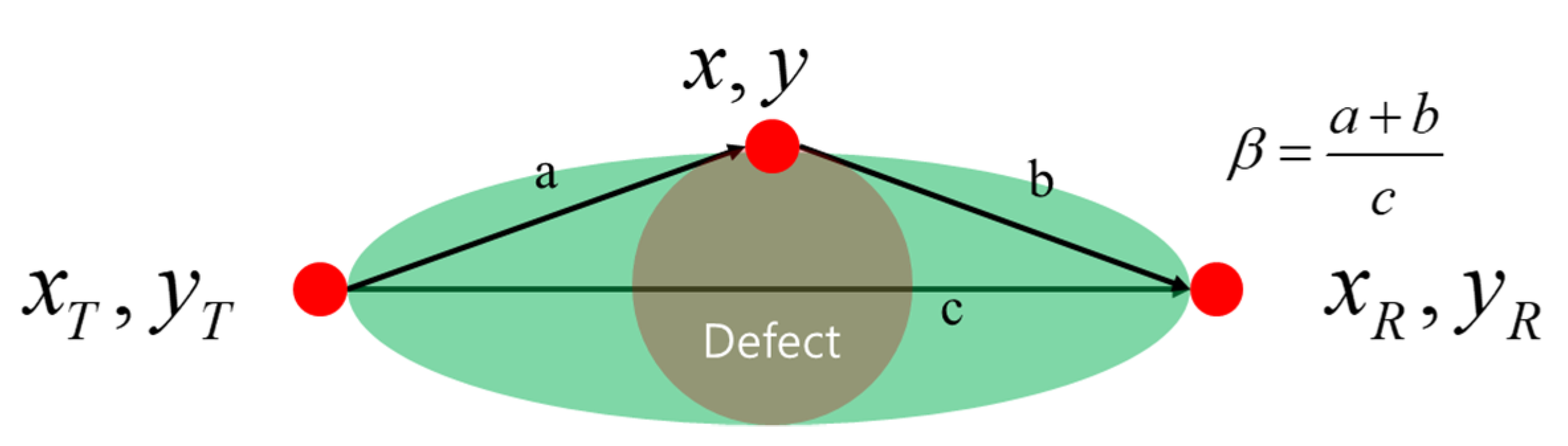
2.2. Basic Principle of the RAPID Algorithm
3. Method and Experimental Setup
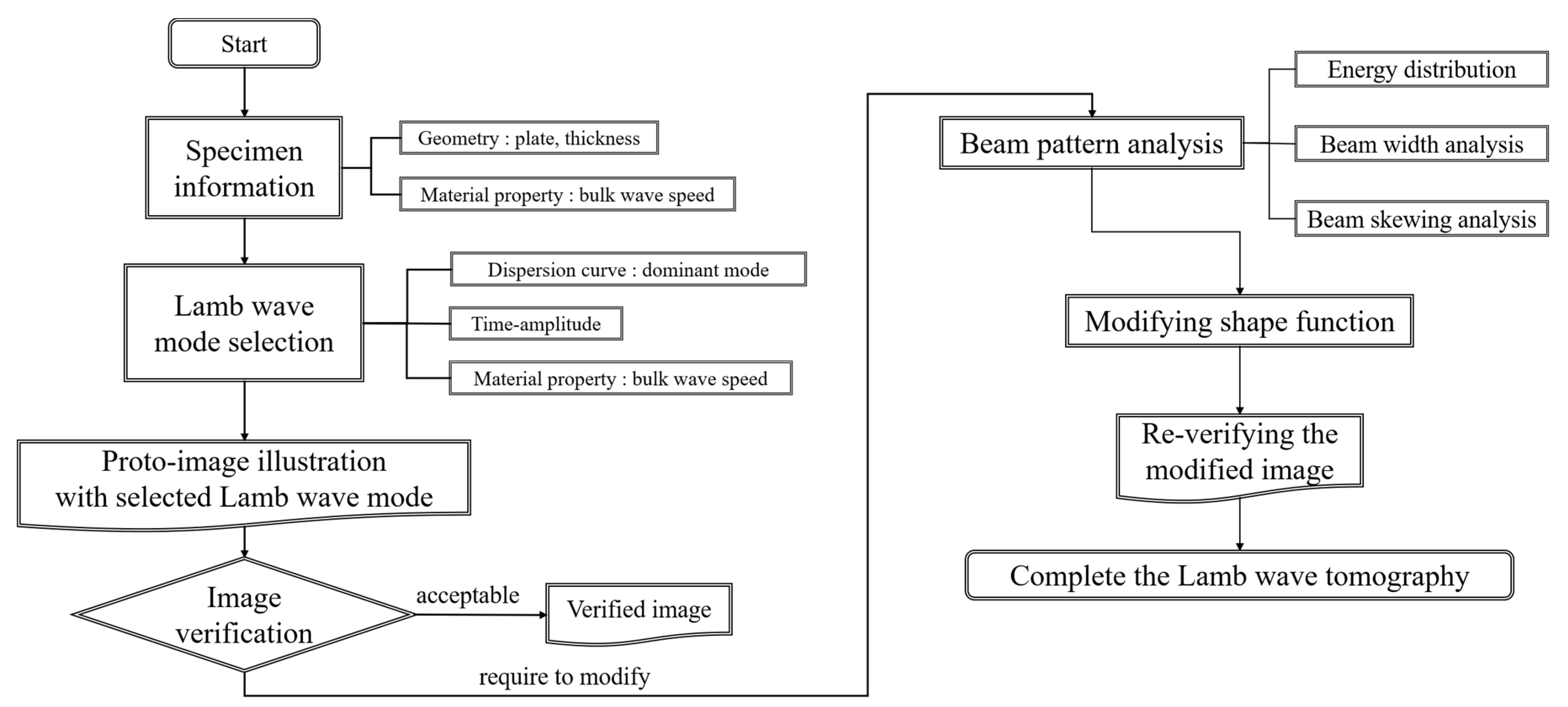
3.1. Total Process of Modifying the Shape Function
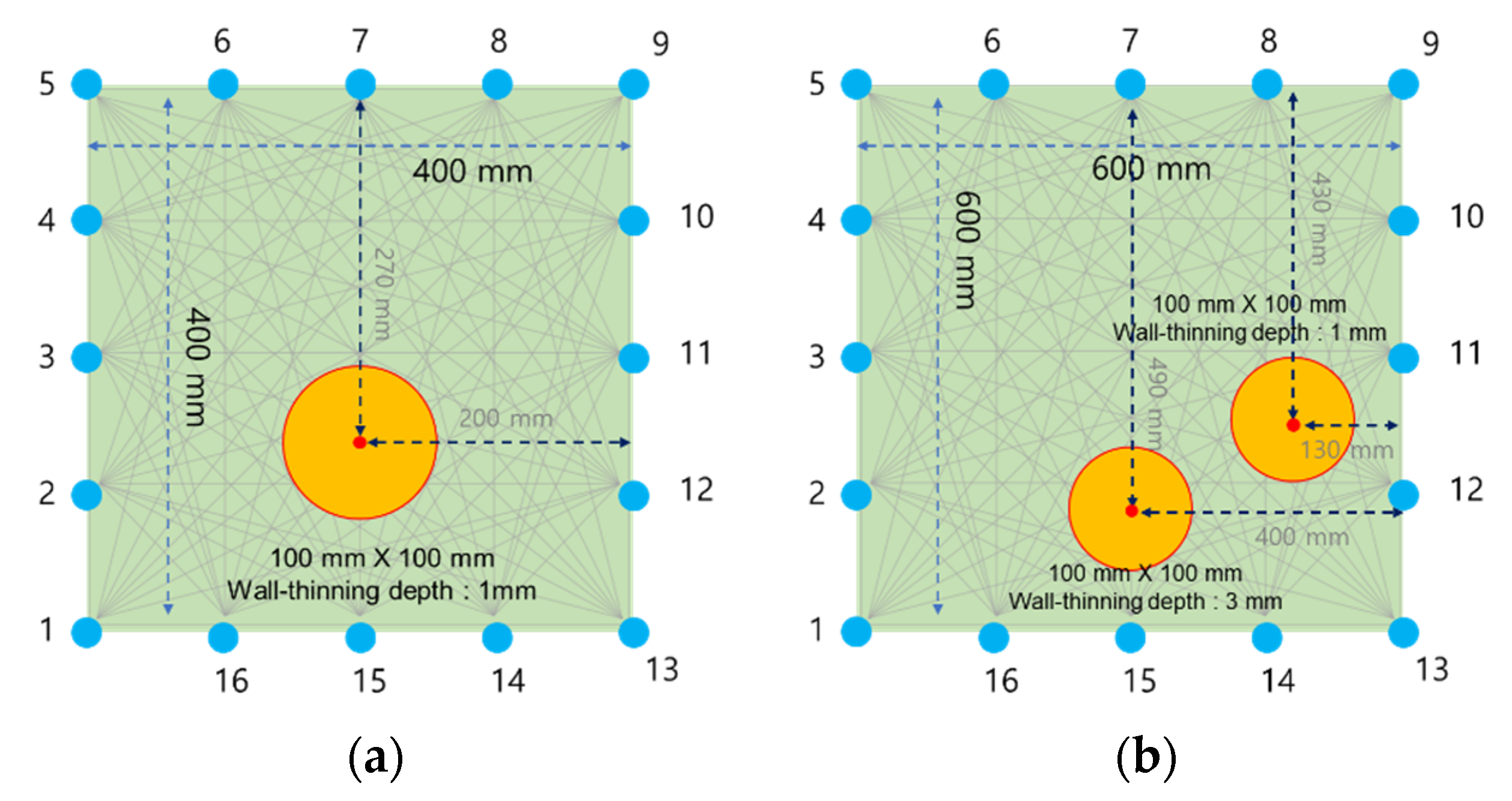
3.2. Specimen
3.3. Experimental Setup
4. Wave Mode Analysis
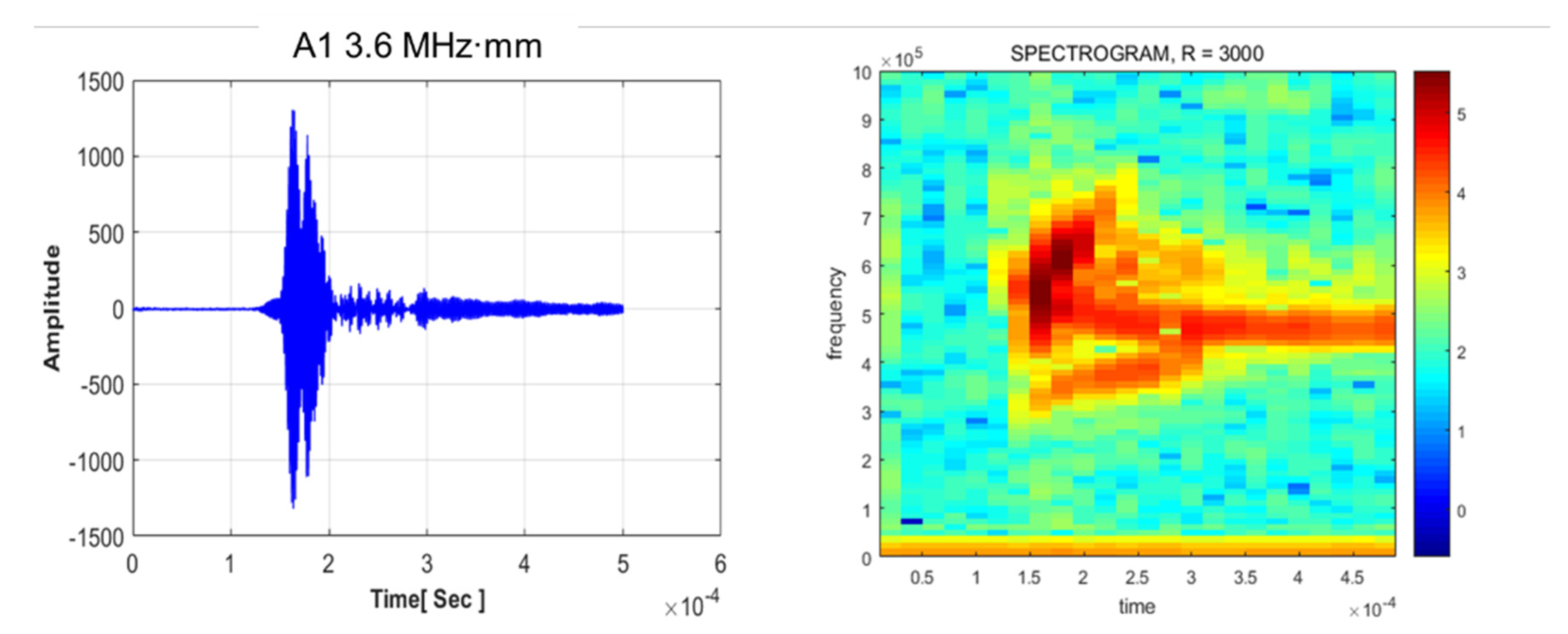
4.1. Waveform Analysis
4.2. Tomographic Effect Analysis
4.3. Mode Verification of Antisymmetric Mode
5. Shape Factor Modification through Beam Pattern Analysis
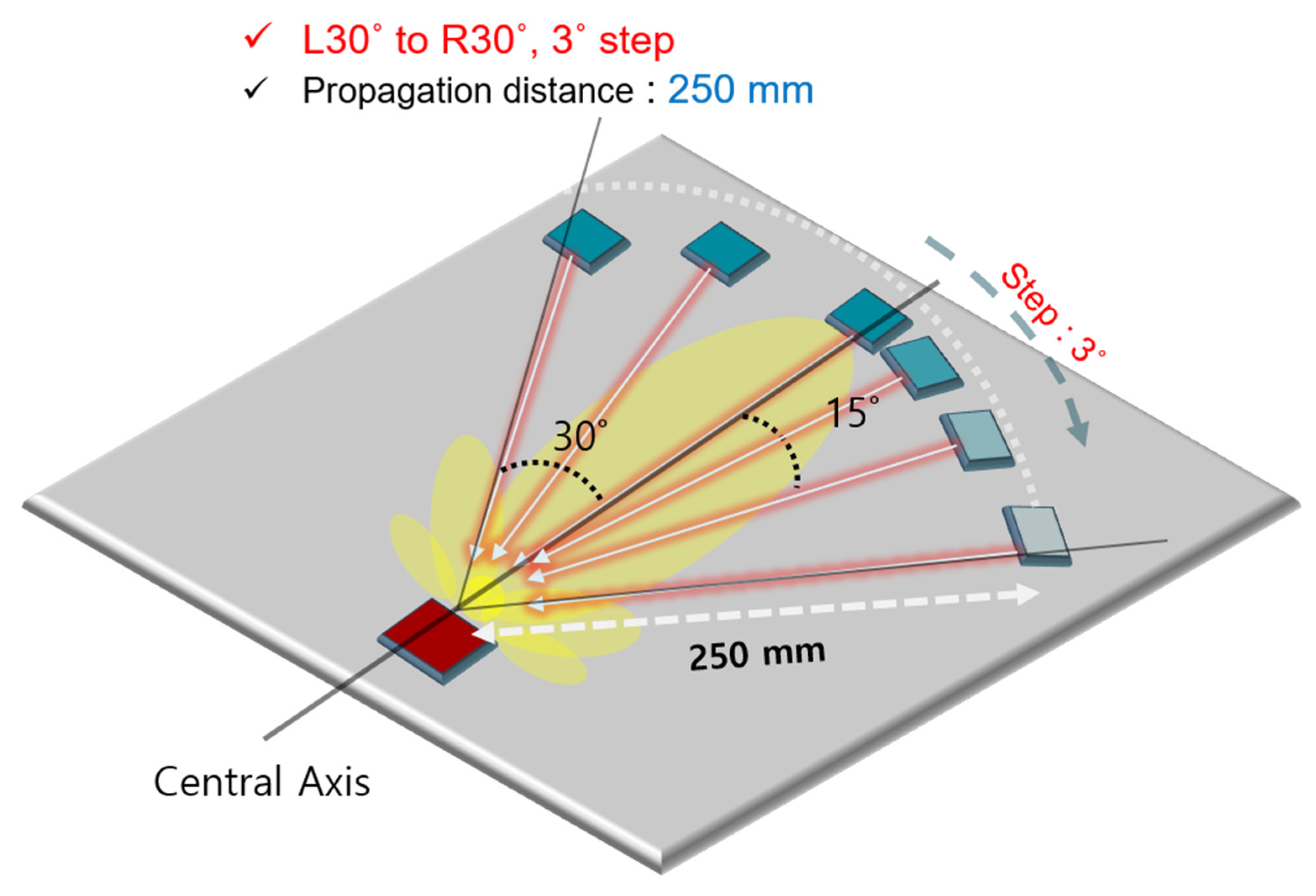
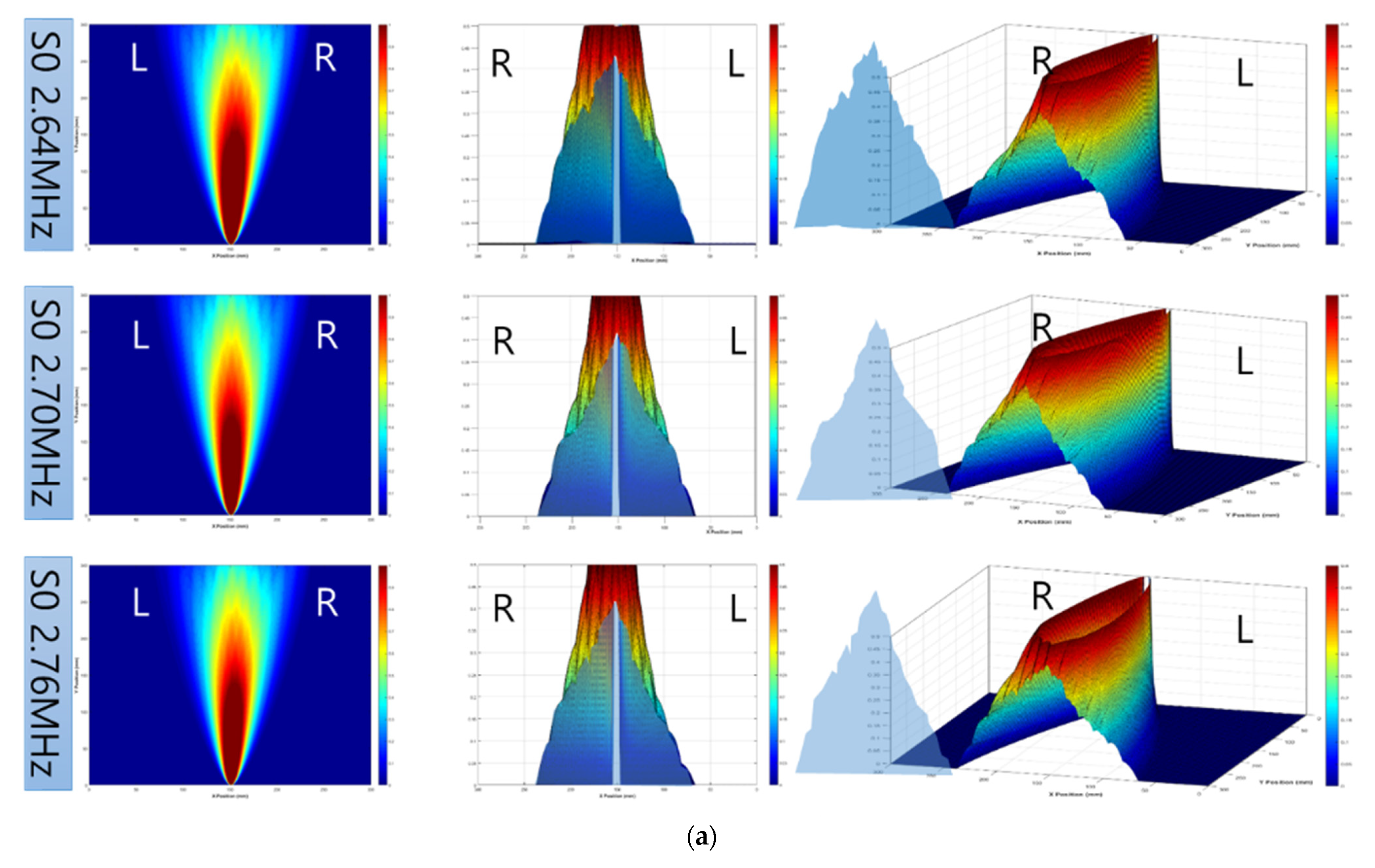
- The main lobe, acoustic beam pattern, and propagation direction were determined by the guided ultrasonic mode.
- Based on the maximum energy level of the main lobe, lobe width was determined by assuming that the 50% energy level was the limit of the energy that can be thinned or defective.
- Based on this, a shape function was selected considering a lobe width of an elliptical shape; the difference between the defect image and the actual defect was analyzed by applying the shape function to the actual defect.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rose, J. Ultrasonic Guided Waves in Solid Media; Cambridge University Press: Cambridge, UK, 2014; pp. 77–119. [Google Scholar]
- Achenbach, J. Wave Propagation in Elastic Solids; Elsevier: Amsterdam, The Netherlands, 1979; Volume 16. [Google Scholar]
- Alleyne, D.; Cawley, P. Optimization of lamb wave inspection techniques. NDT E Int. 1992, 25, 11–22. [Google Scholar] [CrossRef]
- Mueller, W. Manufacturing technique of Minoan and Mycenaean gold finger rings: Combined methods of x-ray and ultrasonic testing. Berichtsband-Deutsche Ges. Zerstor. Pruf. 1994, 451, 703–712. [Google Scholar]
- Sicard, R.; Chahbaz, A.; Goytte, J. Guided lamb waves and L-SAFT processing technique for enhanced detection and imaging of corrosion defects in plates with small depth-to-wavelength ratio. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2004, 51, 1287–1297. [Google Scholar] [CrossRef] [PubMed]
- Hay, T.; Royer, R.; Gao, H.; Zhao, X.; Rose, J. A comparison of embedded sensor Lamb wave ultrasonic tomography approaches for material loss detection. Smart Mater. Struct. 2006, 15, 946–951. [Google Scholar] [CrossRef]
- Rajagopalan, J.; Balasubramaniam, K.; Krishnamurthy, C. A single transmitter multi-receiver(STMR) PZT array for guided ultrasonic wave based structural health monitoring of large isotropic plate structures. Smart Mater. Struct. 2006, 15, 1190–1196. [Google Scholar] [CrossRef]
- Jansen, D.; Hutchins, D. Lamb Wave Tomography. In Proceedings of the IEEE Ultrasonics Symposium, Honolulu, HI, USA, 4–7 December 1990; pp. 1017–1020. [Google Scholar]
- Leonard, K.; Hinders, M. Lamb Wave Tomography of Pipe like Structures. Ultrasonics 2005, 43, 574–583. [Google Scholar] [CrossRef]
- Wilcox, P.; Lowe, M.; Cawley, P. An EMAT Array for the Rapid Inspection of Large Structures Using Guided Waves. AIP Conf. Proc. Ser. 2003, 6571, 814–821. [Google Scholar]
- Malyarenko, E.; Hinders, M. Ultrasonic Lamb wave diffraction tomography. Ultrasonics 2001, 39, 269–281. [Google Scholar] [CrossRef]
- Lee, J.; Sheen, B.; Cho, Y. Quantitative Tomographic Visualization for Irregular Shape Defects by Guided Wave Long Range Inspection. Int. J. Precis. Eng. Manuf. 2015, 16, 1949–1954. [Google Scholar] [CrossRef]
- Lee, Y.; Cho, Y. An investigation on a quantitative tomographic shm technique for a containment liner plate in a nuclear power plant with guided wave mode selection. Sensors 2019, 19, 2819. [Google Scholar] [CrossRef]
- Rao, J.; Ratassepp, M.; Fan, Z. Investigation of the reconstruction accuracy of guided wave tomography using full waveform inversion. J. Sound Vib. 2017, 400, 317–328. [Google Scholar] [CrossRef]
- Rao, J.; Yang, J.; Ratassepp, M.; Fan, Z. Multi-parameter reconstruction of velocity and density using ultrasonic tomography based on full waveform inversion. Ultrasonics 2020, 101, 106004. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Tan, C.; Dong, F. Absolute reconstruction of Ultrasonic Tomography for oil-water biphasic medium imaging using modified ray-tracing technique. Meas. Sens. 2020, 7–9, 100023. [Google Scholar] [CrossRef]
- Li, D.; Shi, M.; Xu, F.; Liu, C.; Zhang, J.; Ta, D. A New Approach to Guided Wave Ray Tomography for Temperature-Robust Damage Detection Using Piezoelectric Sensors. Sensors 2018, 18, 3518. [Google Scholar] [CrossRef] [PubMed]
- Huthwaite, P. Guided wave tomography with an improved scattering model. Proc. R. Soc. A 2016, 472, 2195–2219. [Google Scholar] [CrossRef]
- Rose, L.R.F.; Chan, E.; Wang, C.-H. A comparison and extensions of algorithms for quantitative imaging of laminar damage I plates. I. point spread functions and near filed imaging. Wave Motion 2015, 58, 222–243. [Google Scholar] [CrossRef]
- Huang, S.; Wei, Z.; Zhao, W.; Wang, S. A New Omni-directional EMAT for Ultrasonic Lamb Wave Tomography Imaging of Metallic Plate Defects. Sensors 2014, 14, 3458–3476. [Google Scholar] [CrossRef]
- Lize, E.; Rebillat, M.; Mechbal, N.; Bolzmacher, C. Optimal dual-PZT sizing and network design for baseline-free SHM of complex anisotropic composite structures. Smart Mater. Struct. 2018, 27, 11518. [Google Scholar] [CrossRef]
- Huan, Q.; Chen, M.; Li, F. A practical omni-directional SH wave transducer for structural health monitoring based on two thickness-poled piezoelectric half-rings. Ultrasonics 2019, 94, 342–429. [Google Scholar] [CrossRef]
- Neubeck, R.; Stephan, M.; Gaul, T.; Weihnacht, B.; Schubert, L.; Bindingsbø, A.; Østvik, J. Estimation of the Filling Distribution and Height Levels Inside an Insulated Pressure Vessel by Guided Elastic Wave Attenuation Tomography. Sensors 2021, 21, 179. [Google Scholar] [CrossRef]
- Nguyen, L.; Kocur, G.; Saenger, E. Defect mapping in pipes by ultrasonic wavefield cross-correlation: A synthetic verification. Ultrasonics 2018, 90, 153–165. [Google Scholar] [CrossRef]
- Simonetti, F.; Alqaradawi, M. Guided ultrasonic wave tomography of a pipe bend exposed to environmental conditions: A long term monitoring experiment. NDT E Int. 2019, 105, 1–10. [Google Scholar] [CrossRef]
- Li, W.; Cho, Y. Combination of nonlinear ultrasonics and guided wave tomography for imaging the micro-defects. Ultrasonics 2016, 65, 87–95. [Google Scholar] [CrossRef]
- Chen, W.; Wang, P.; Zhang, Z.; Deng, X.; Zhang, C.; Ju, S. Nonlinear ultrasonic imaging in pulse-echo mode using Westervelt equation: A preliminary research. Comput. Assist. Surg. 2019, 24, 54–61. [Google Scholar] [CrossRef] [PubMed]
- Glowacz, A. Fault diagnosis of electric impact drills using thermal imaging. Measurement 2020, 171, 2021. [Google Scholar]
- Versaci, M.; Morabito, F. Image edge detection: A new approach based on fuzzy entropy and fuzzy divergence. Int. J. Fuzzy Syst. 2021. [Google Scholar] [CrossRef]
- Kaur, P.; Chaira, T. A novel fuzzy approach for segmenting medical images. Soft Comput. 2021, 25, 3365–3375. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wave Mode | Theoretical (m/s) | Experimental (m/s) | Error (%) |
|---|---|---|---|
| Rayleigh wave | 2960 | 2980 | 0.7 |
| S0 2.16 MHz·mm | 2950 | 2850 | 3.4 |
| S0 2.22 MHz·mm | 2780 | 2830 | 1.8 |
| S0 2.28 MHz·mm | 2120 | 2120 | 0.1 |
| S0 2.34 MHz·mm | 2010 | 2090 | 4 |
| S0 2.40 MHz·mm | 1940 | 2000 | 3.1 |
| S0 2.46 MHz·mm | 1870 | 1920 | 2.7 |
| S0 2.52 MHz·mm | 1700 | 1830 | 4.1 |
| S0 2.64 MHz·mm | 1710 | 1840 | 7.1 |
| S0 2.70 MHz·mm | 1850 | 1820 | 1.6 |
| S0 2.76 MHz·mm | 1910 | 1850 | 3.1 |
| A1 3.6 MHz·mm | 2878 | 2930 | 1.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, Y.; Cho, Y. Defect Imaging Enhancement through Optimized Shape Factors of the RAPID Algorithm Based on Guided Wave Beam Pattern Analysis. Sensors 2021, 21, 4029. https://doi.org/10.3390/s21124029
Lee Y, Cho Y. Defect Imaging Enhancement through Optimized Shape Factors of the RAPID Algorithm Based on Guided Wave Beam Pattern Analysis. Sensors. 2021; 21(12):4029. https://doi.org/10.3390/s21124029
Chicago/Turabian StyleLee, Yonghee, and Younho Cho. 2021. "Defect Imaging Enhancement through Optimized Shape Factors of the RAPID Algorithm Based on Guided Wave Beam Pattern Analysis" Sensors 21, no. 12: 4029. https://doi.org/10.3390/s21124029
APA StyleLee, Y., & Cho, Y. (2021). Defect Imaging Enhancement through Optimized Shape Factors of the RAPID Algorithm Based on Guided Wave Beam Pattern Analysis. Sensors, 21(12), 4029. https://doi.org/10.3390/s21124029