The Single-Shore-Station-Based Position Estimation Method of an Automatic Identification System


Abstract
1. Introduction
- Traditional positioning in AIS R-Mode needs at least three reference stations. This paper proposes a position estimation method for a single shore station by using multiple antennas on a vessel.
- Due to the limited size of the vessel, the distances between different antennas to the shore station are approximately the same and not sufficiently independent. The positioning matrix is prone to being near singularity or ill-conditioned. The second significant finding is an effective position solving method for this near-singular positioning matrix.
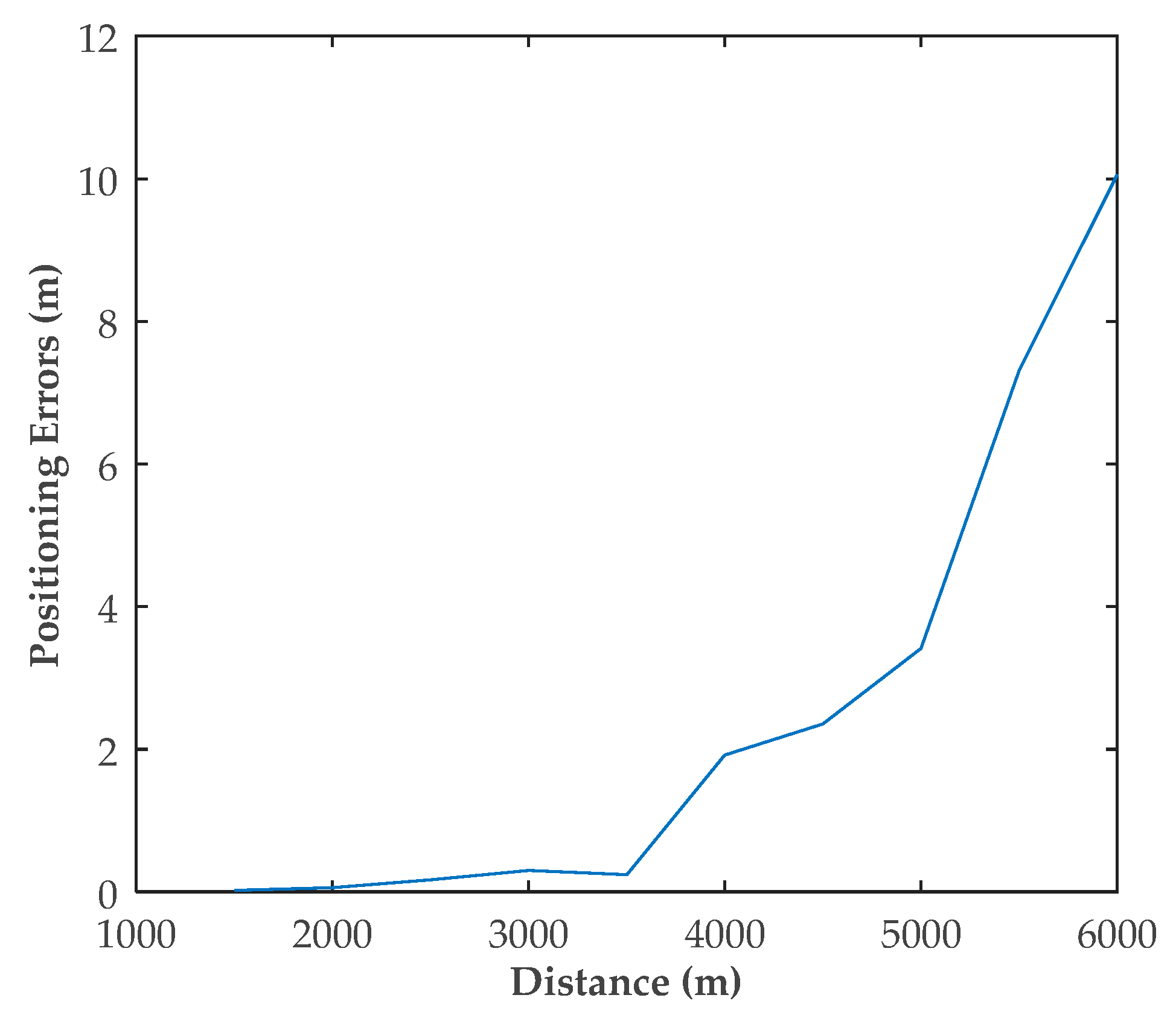
- The proposed method was verified and evaluated in different scenarios using MATLAB simulations. The positioning performance of the proposed method was found to be influenced by the relative position between the antennas and the shore station. Further, position errors increased as the distance increased.
2. AIS R-Mode Positioning
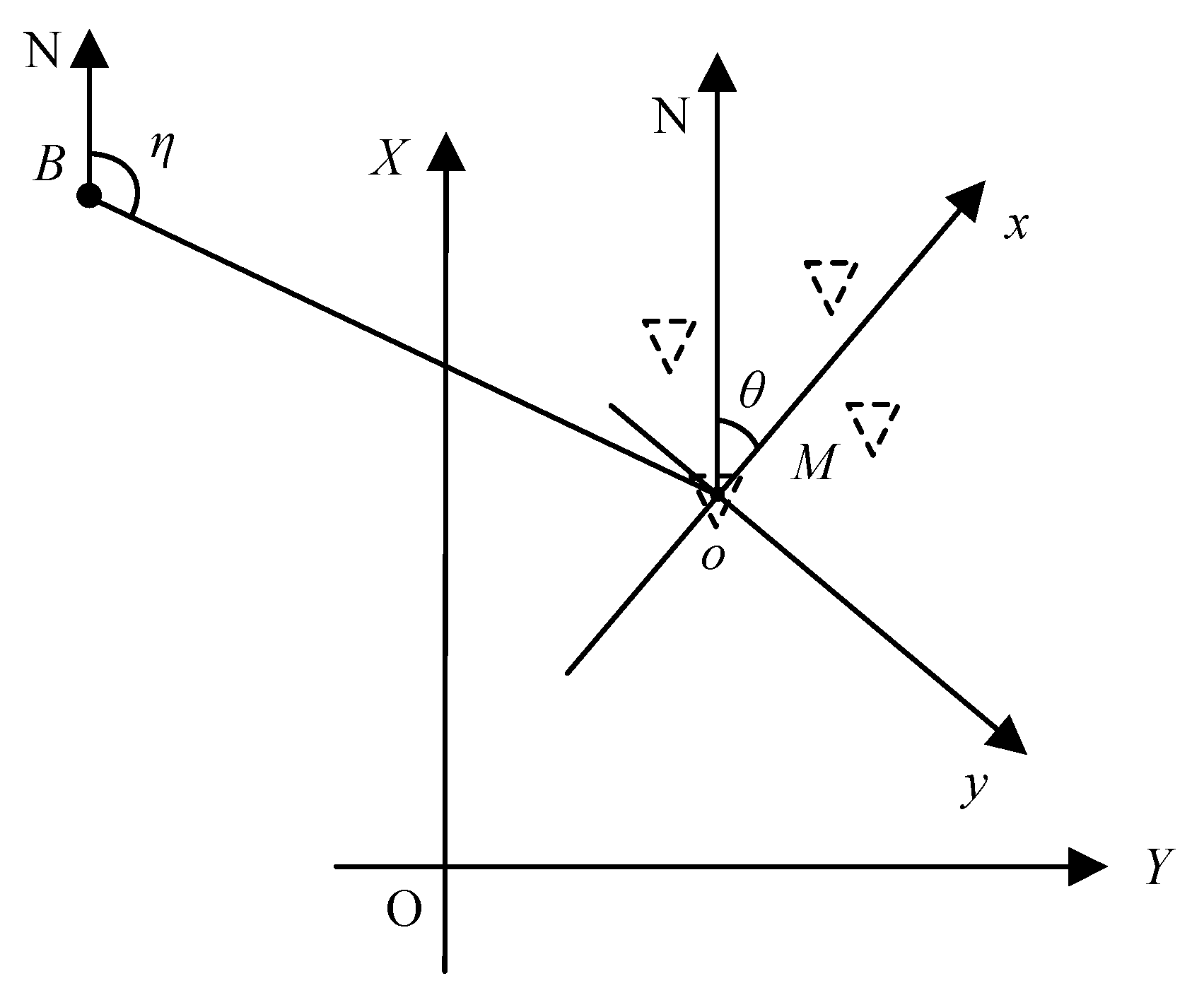
3. Positioning Method for a Single Shore Station
3.1. Condition of Three Antennas
3.2. Condition of More Than Three Antennas
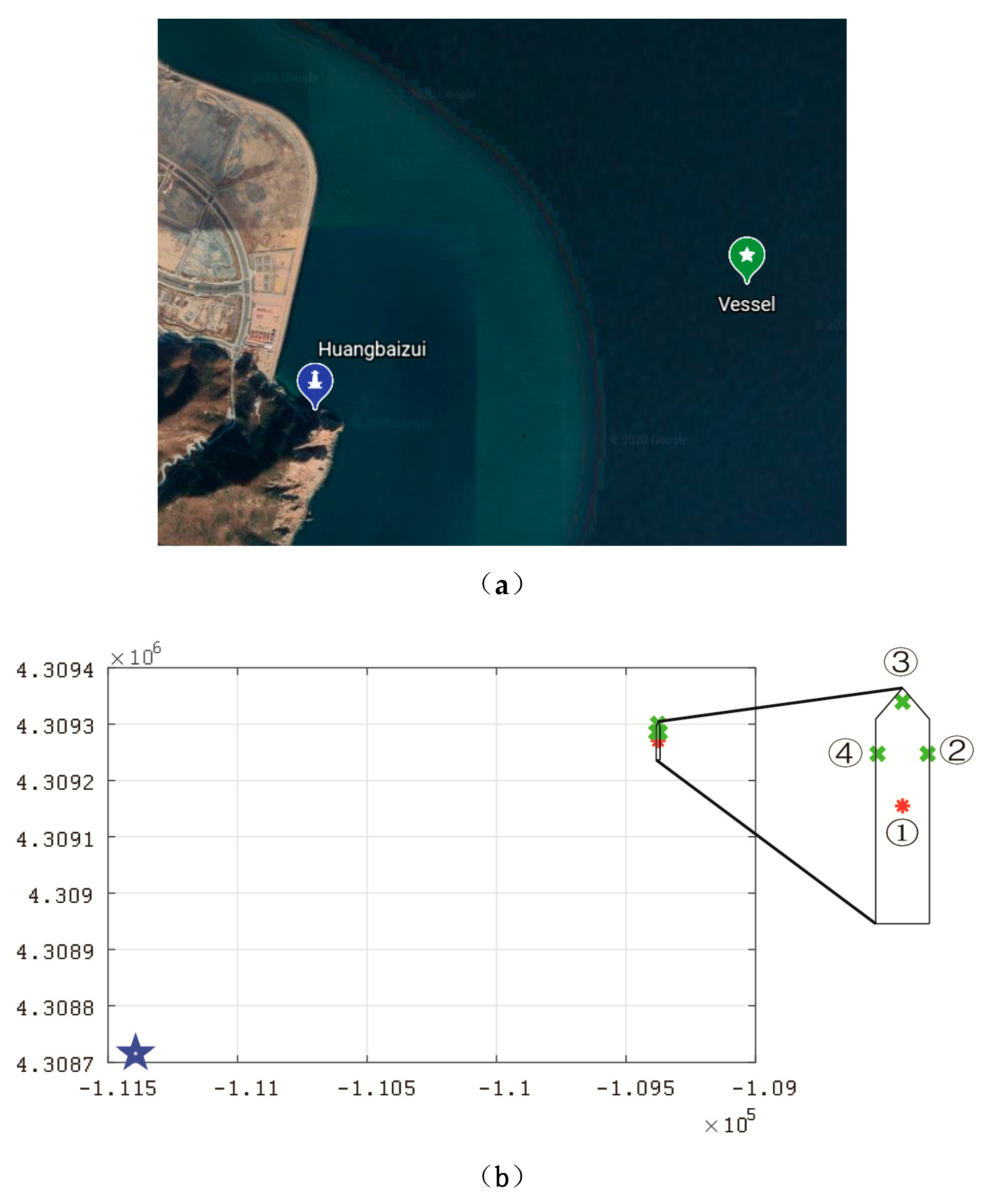
4. Simulation Scenario
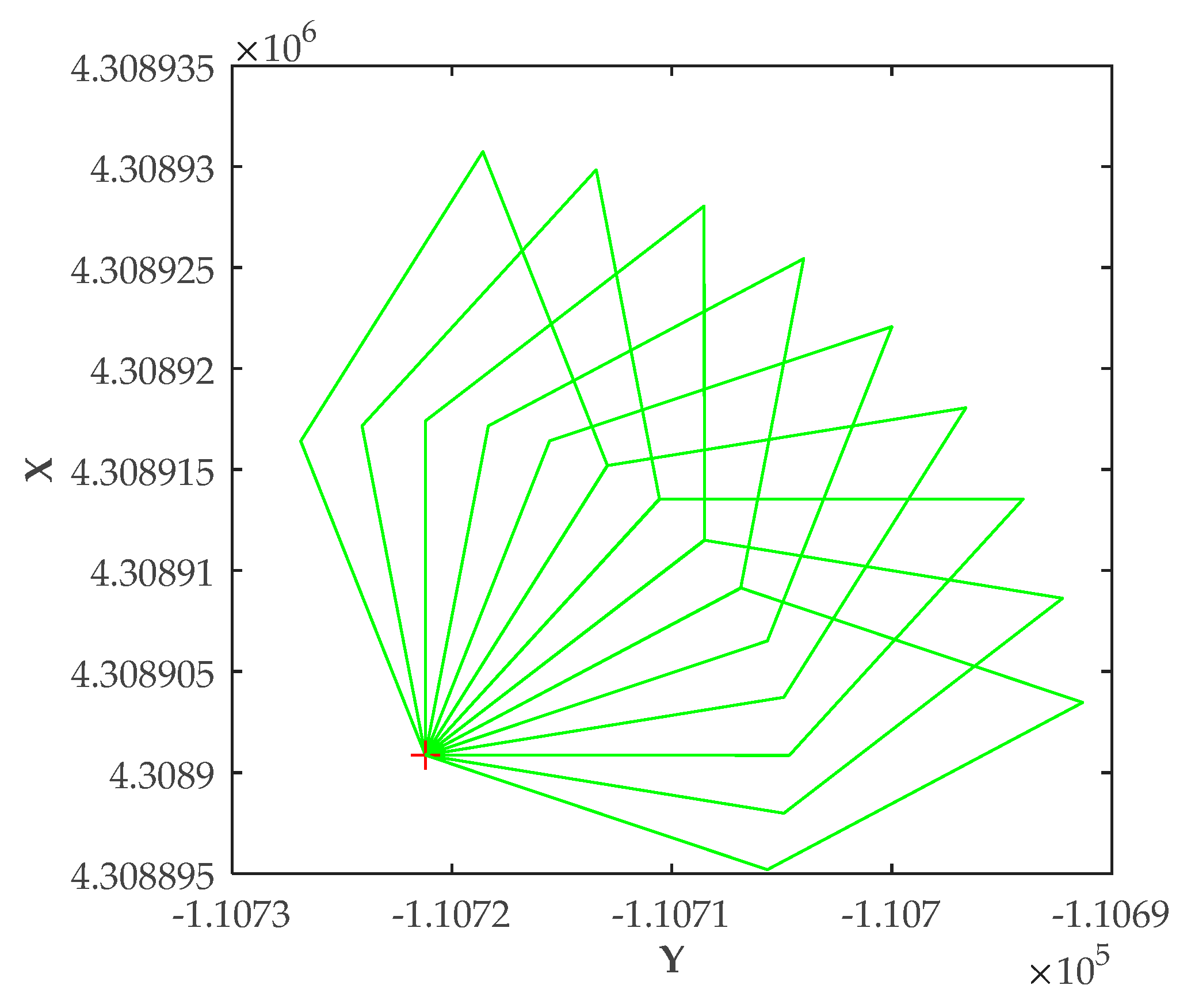
- Scenario 1: The heading angle was 0°. In order to evaluate the effects of the heading angle of the vessel on the positioning errors, the location of the vessel was fixed and just the heading angle was changing.
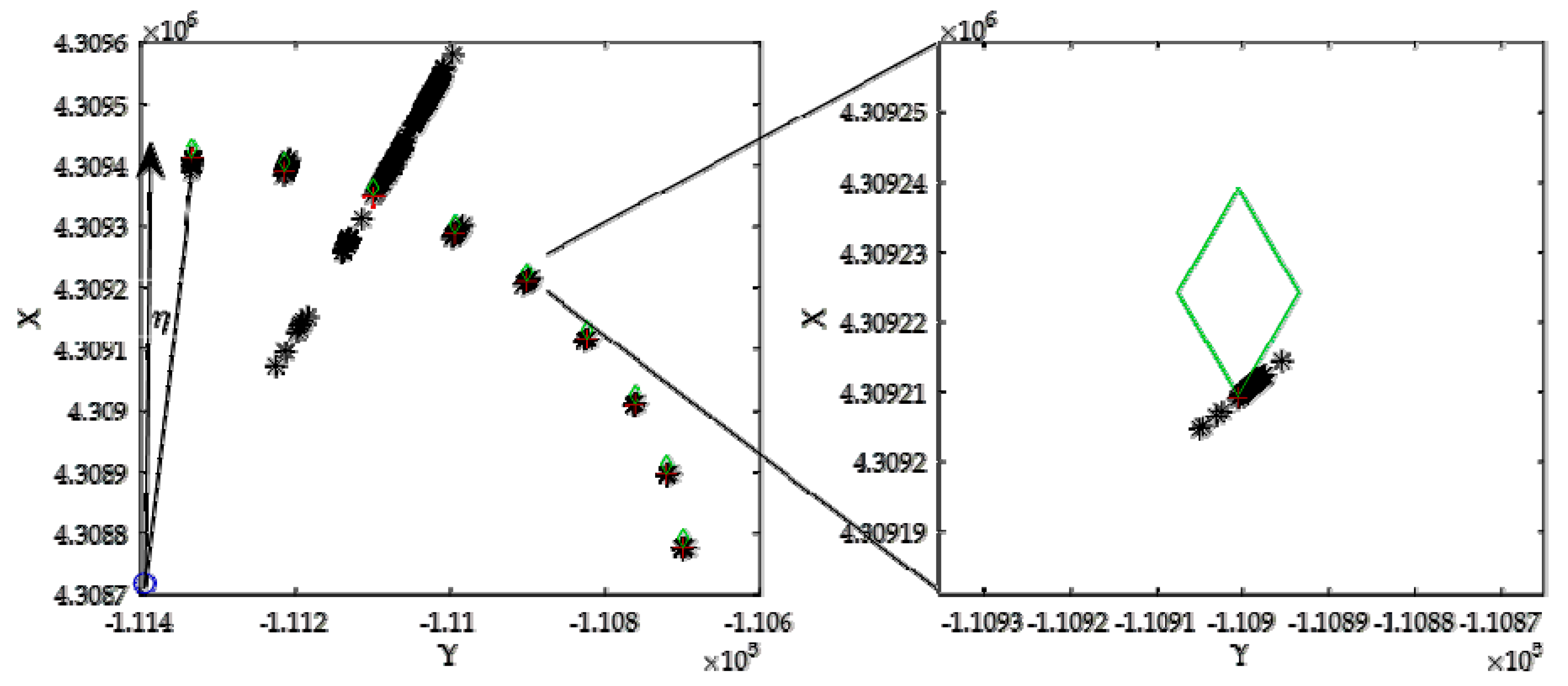
- Scenario 2: The vessel moved along a circular trajectory, the center of which was the location of the shore station. During the movement, the heading angle of the vessel was constant.
- Scenario 3: The vessel moved along a circular trajectory, the center of which was the location of the shore station. During the movement, the heading angle of the vessel was continuously adjusted to maintain the relative position between the antennas and the shore station.
- Scenario 4: The vessel moved toward or away from the shore station with a constant heading angle. Only the distance between the shore station and the vessel was changing.
5. Simulation Results Analysis
5.1. Scenario 1: Positioning Errors Vary with Heading Angles
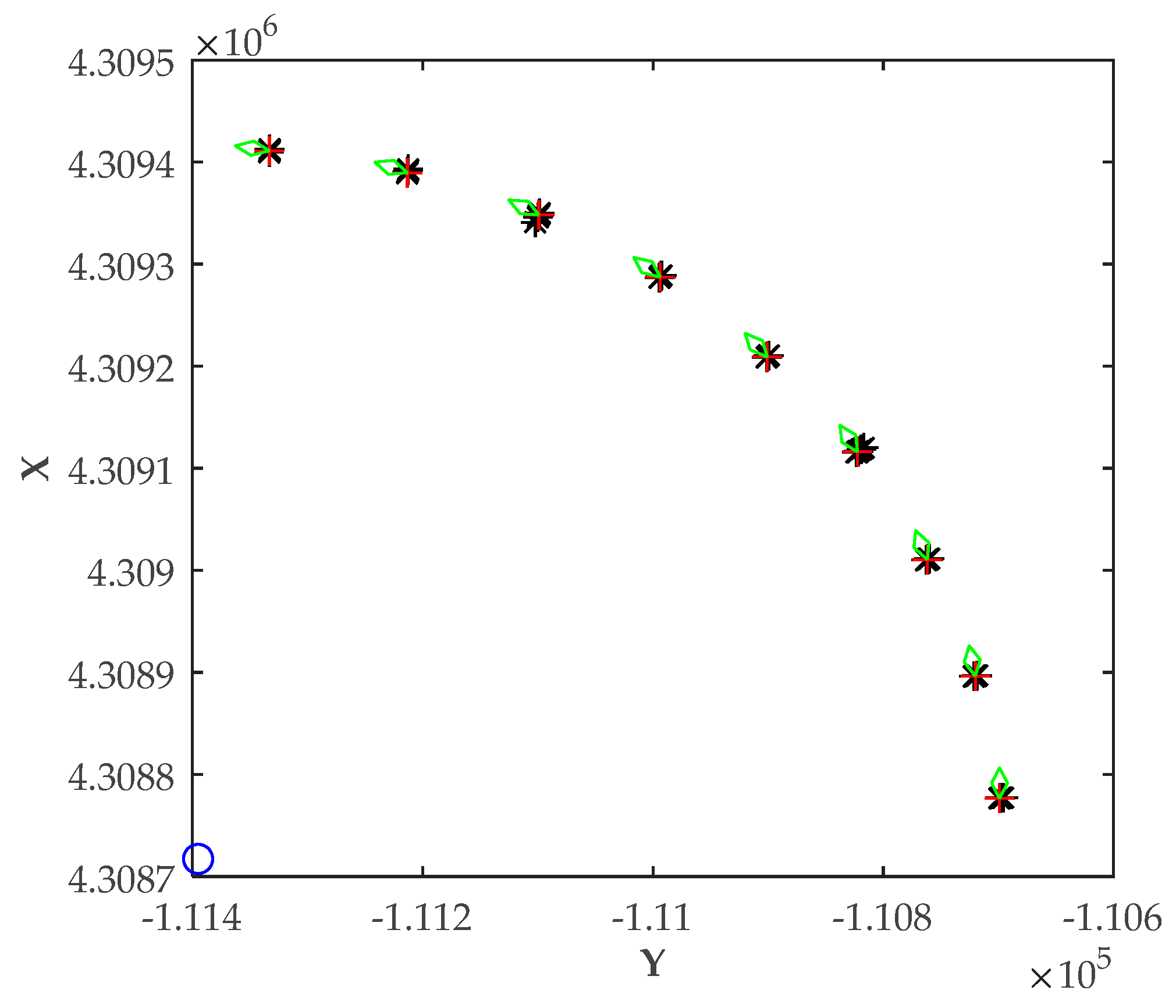
5.2. Scenario 2: Positioning Errors Vary with Vessel’s Position
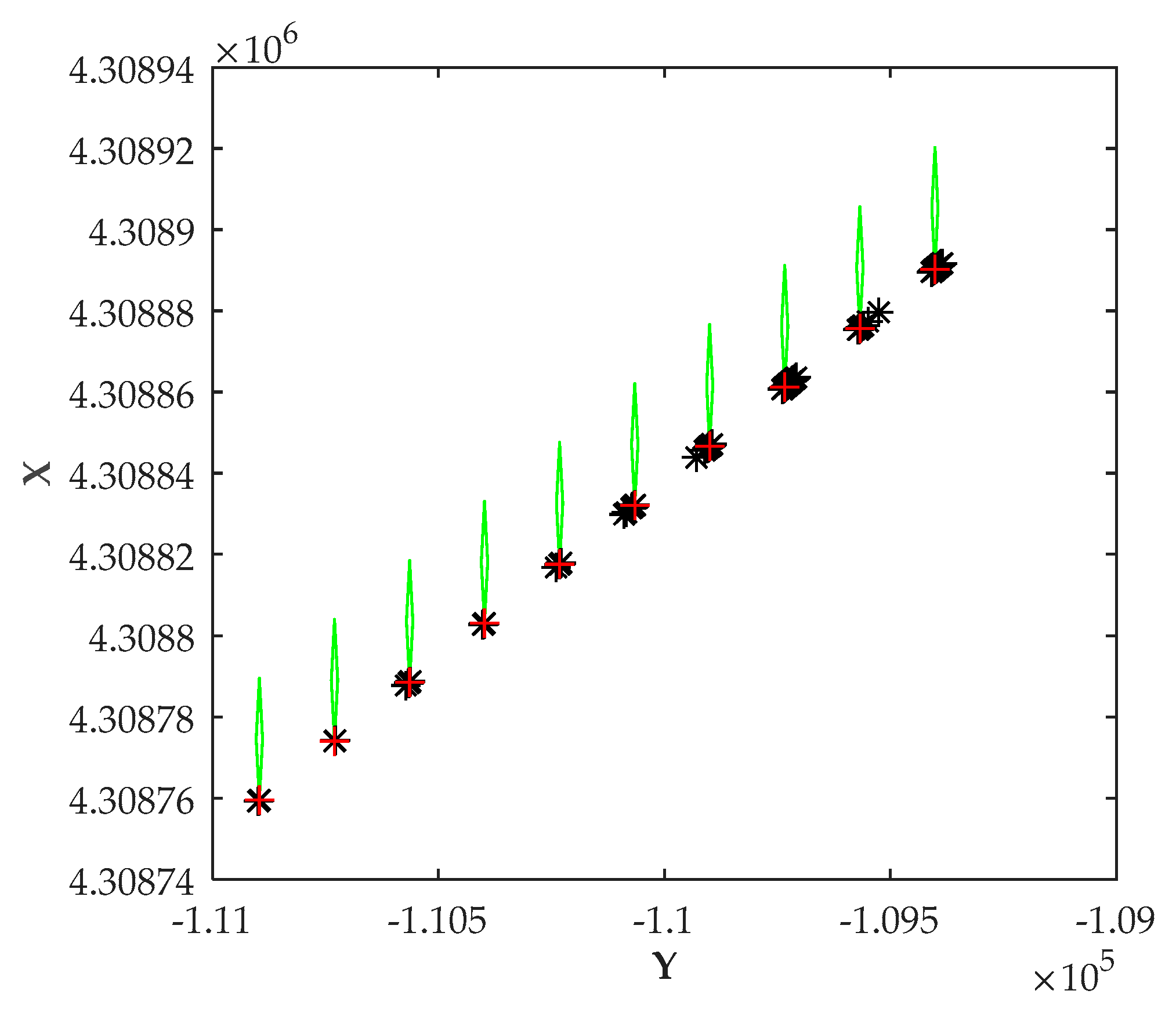
5.3. Scenario 3: Positioning Errors Vary with Relative Position
5.4. Scenario 4: Positioning Errors Vary with Distances
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Grant, A.; Williams, P.; Shaw, G.; de Voy, M.; Ward, N. Understanding GNSS availability and how it impacts maritime safety. In Proceedings of the Institute of Navigation International Technical Meeting, San Diego, CA, USA, 24–26 January 2011; pp. 687–695. [Google Scholar]
- Williams, P.; Grant, A.; Hargreaves, C. Resilient PNT—Making way through rough waters. In Proceedings of the 7th GNSS Vulnerabilities and Solutions Conference, Baška, Krk Island, Croatia, 18–20 April 2013. [Google Scholar]
- Maritime Safety Committee. Adoption of amendments to the international convention to the safety of life at sea, 1974, as amended. Resolut. MSC 2006, 216, 82. [Google Scholar]
- Available online: http://www.imo.org/en/about/conventions/listofconventions/pages/international-convention-for-the-safety-of-life-at-sea-(solas),-1974.aspx (accessed on 10 January 2020).
- International Maritime Organization. SOLAS 1974 Amendments; International Maritime Organization: London, UK, 2000. [Google Scholar]
- Creech, J.; Ryan, J. AIS the cornerstone of national security? J. Navig. 2003, 56, 31–44. [Google Scholar] [CrossRef]
- International Association of Lighthouse Authorities. IALA Worldwide Radio Navigation Plan, Version 2; International Association of Lighthouse Authorities: St Germain en Laye, France, 2012. [Google Scholar]
- Williams, P.; Grant, A.; Hargreaves, C.; Bransby, M.; Ward, N.; Last, D. Resilient PNT for e-Navigation. In Proceedings of the ION 2013 Pacific PNT Meeting, Honolulu, HI, USA, 23–25 April 2013; pp. 477–484. [Google Scholar]
- Johnson, G.; Swaszek, P.; Alberding, J.; Hoppe, M.; Oltmann, J.H. The feasibility of r-mode to meet resilient PNT requirements for e-navigation. In Proceedings of the 27th International Technical Meeting of the Satellite Division of the Institute of Navigation, Tampa, FL, USA, 8–12 September 2014; pp. 3076–3100. [Google Scholar]
- Ward, N.; Shaw, G.; Williams, P.; Grant, A. The Role of GNSS in E-Navigation and the Need for Resilience. Available online: http://www.forschungsinformationssystem.de/servlet/is/342313/ (accessed on 10 January 2020).
- Hu, Q.; Jiang, Y.; Zhang, J.B.; Sun, X.W.; Zhang, S.F. Development of an automatic identification system autonomous positioning system. Sensors 2015, 15, 28574–28591. [Google Scholar] [CrossRef] [PubMed]
- Johnson, G.; Swaszek, P. Feasibility Study of R-Mode Using AIS Transmissions. Available online: http://www.accseas.eu/publications/r-mode-feasibility-study/ (accessed on 10 January 2020).
- Chang, S.J. Development and analysis of AIS applications as an efficient tool for vessel traffic service. In Proceedings of the MTTS/IEEE TECHNO-OCEAN ′04, Kobe, Japan, 9–12 November 2004. [Google Scholar]
- Johnson, G.; Swaszek, P.; Hoppe, M.; Grant, A.; Safar, J. Initial results of MF-DGNSS R-Mode as an alternative position navigation and timing service. In Proceedings of the 2017 International Technical Meeting of the Institute of Navigation, Monterey, CA, USA, 30 January–2 February 2017; pp. 1206–1226. [Google Scholar]
- Julia, H.; Stefan, G. Launch of R-Mode Baltic Project—An Alternative Navigation System at Sea. Available online: http://www.dlr.de/dlr/en/desktopdefault.aspx/tabid-10260/370_read-24695#/gallery/28882/ (accessed on 10 January 2020).
- Zhang, J.B.; Zhang, S.F.; Wang, J.P. Pseudorange measurement method based on AIS signals. Sensors 2017, 17, 1183. [Google Scholar] [CrossRef] [PubMed]
- Han, Y.; Son, P.; Lee, S.; Park, S.G.; Fang, T.H.; Park, S. A measurement based accuracy prediction of terrestrial radio navigation system for maritime backup in South Korea. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of the Institute of Navigation, Miami, FL, USA, 16–20 September 2019; pp. 1512–1523. [Google Scholar]
- Dziewicki, M.; Gewies, S.; Hoppe, M. R-Mode Baltic—A user need driven testbed development for the Baltic Sea. In Proceedings of the 31st International Technical Meeting of the Satellite Division of The Institute of Navigation, Miami, FL, USA, 24–28 September 2018; pp. 1736–1764. [Google Scholar]
- Nguyen, N.H.; Doğançay, K. Optimal geometry analysis for multistatic TOA localization. IEEE Trans. Signal Process. 2016, 64, 4180–4193. [Google Scholar] [CrossRef]
- Shalaby, M.; Shokair, M.; Messiha, N.W. Performance enhancement of TOA localized wireless sensor networks. Wirel. Pers. Commun. 2017, 95, 4667–4679. [Google Scholar] [CrossRef]
- Lee, H.K.; Kim, H.; Shim, J.; Heo, M.B. Analytic equivalence of iterated TOA and TDOA techniques under structured measurement characteristics. Multidimens. Syst. Signal Process. 2011, 22, 361–377. [Google Scholar] [CrossRef]
- Ionel, R.; Ionel, S. The majority principle in TDOA estimation. In Proceedings of the International Conference on Communications, Bucharest, Romania, 10–12 June 2010; pp. 21–24. [Google Scholar]
- Ma, S.; Liu, Z.; Jiang, W.L. Pulse sorting algorithm using TDOA in multiple sensors system. In Proceedings of the Advanced Materials Research, Shenyang, China, 27–29 July 2012; Volume 571, pp. 665–670. [Google Scholar]
- Xu, J.; Ma, M.; Law, C.L. Position estimation using UWB TDOA measurements. In Proceedings of the IEEE 2006 International Conference on Ultra-Wideband, Waltham, MA, USA, 24–27 September 2007; pp. 605–610. [Google Scholar]
- Zheng, K.; Hu, Q.; Zhang, J. Positioning error analysis of ranging-mode using AIS signals in China. J. Sens. 2016, 2016, 1–11. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhang, S.F.; Yang, D.K. A novel position estimation method based on displacement correction in AIS. Sensors 2014, 14, 17376–17389. [Google Scholar] [CrossRef] [PubMed]
- Jiang, Y.; Wu, J.; Zhang, S. An improved positioning method for two base stations in AIS. Sensors 2018, 18, 991. [Google Scholar] [CrossRef] [PubMed]
- Shi, G.; Ming, Y. Survey of indoor positioning systems based on ultra-wideband (UWB) technology. Wirel. Commun. Netw. Appl. 2016, 348, 1269–1278. [Google Scholar]
- Ren, J.; Chen, J.; Feng, L. A novel positioning algorithm based on self-adaptive algorithm of RBF network. Open Electr. Electron. Eng. J. 2016, 10, 141–148. [Google Scholar] [CrossRef]
- Zhang, X.; Huang, D.; Liao, H. New mathematical model for GNSS relative positioning resolving. J. Southwest Jiaotong Univ. 2015, 50, 485–489. [Google Scholar]
- Pulford, G.W. Analysis of a nonlinear least squares procedure used in global positioning systems. IEEE Trans. Signal Process. 2010, 58, 4526–4534. [Google Scholar] [CrossRef]
- He, Y.; Martin, R.; Bilgic, A.M. Approximate iterative Least Squares algorithms for GPS positioning. In Proceedings of the IEEE International Symposium on Signal Processing and Information Technology, Luxor, Egypt, 15–18 December 2010; pp. 231–236. [Google Scholar]
- Liu, L.; Deng, P.; Fan, P. A cooperative location method based on Chan and Tayor Algorithms. J. Electron. Inf. Technol. 2004, 26, 41–46. [Google Scholar]
- Chan, Y.T.; Ho, K.C. A simple and efficient estimator for hyperbolic location. IEEE Trans. Signal Process. 2002, 42, 1905–1915. [Google Scholar] [CrossRef]
- Jiang, Y.; Hu, Q.; Yang, D.; Zheng, K. Map projection positioning method in ranging-mode of automatic identification system. ICIC Express Lett. 2016, 10, 1093–1100. [Google Scholar]
- Binder, K.; Heermann, D.W. Guide to practical work with the Monte Carlo method. In Monte Carlo Simulation in Statistical Physics; Springer: Berlin/Heidelberg, Germany, 2002. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Heading Angle θ | 5 | 15 | 25 | 35 | 45 | 55 | 65 | 75 | 85 |
|---|---|---|---|---|---|---|---|---|---|
| Theoretical RMSE | 1.609 | 2.849 | 4.439 | 6.381 | 8.682 | 11.324 | 14.334 | 17.685 | 21.350 |
| Simulated RMSE | 1.609 | 2.888 | 4.441 | 6.386 | 8.683 | 11.332 | 14.334 | 17.688 | 21.395 |
| Filtered position error | 0.019 | 0.057 | 0.165 | 0.240 | 0.298 | 1.916 | 2.354 | 3.412 | 7.312 |
| Relative Azimuth Angle η | 85 | 75 | 65 | 55 | 45 | 35 | 25 | 15 | 5 |
|---|---|---|---|---|---|---|---|---|---|
| Theoretical RMSE | 3.117 | 3.418 | 4.077 | 5.412 | 8.451 | 18.688 | 271.811 | 22.850 | 15.274 |
| Simulated RMSE | 3.118 | 3.420 | 4.078 | 5.408 | 8.473 | 18.690 | 352.870 | 22.950 | 15.276 |
| Filtered position error | 0.092 | 0.102 | 0.092 | 0.231 | 1.464 | 3.797 | 588.233 | 7.592 | 3.400 |
| Heading Angle θ | 85 | 75 | 65 | 55 | 45 | 35 | 25 | 15 | 5 |
|---|---|---|---|---|---|---|---|---|---|
| Theoretical RMSE | 3.117 | 3.117 | 3.117 | 3.117 | 3.117 | 3.117 | 3.117 | 3.117 | 3.117 |
| Simulated RMSE | 3.119 | 3.115 | 3.119 | 3.118 | 3.113 | 3.117 | 3.118 | 3.116 | 3.117 |
| Filtered position error | 0.142 | 0.077 | 0.142 | 0.141 | 0.233 | 0.041 | 0.245 | 0.072 | 0.031 |
| Distance | 1500 | 2000 | 2500 | 3000 | 3500 | 4000 | 4500 | 5000 | 5500 | 6000 |
|---|---|---|---|---|---|---|---|---|---|---|
| Theoretical RMSE | 1.609 | 2.849 | 4.441 | 6.385 | 8.682 | 11.332 | 14.334 | 17.688 | 21.350 | 25.422 |
| Simulated RMSE | 1.609 | 2.849 | 4.449 | 6.386 | 8.683 | 11.334 | 14.334 | 17.689 | 21.395 | 25.454 |
| Filtered position error | 0.019 | 0.057 | 0.1654 | 0.298 | 0.4202 | 1.916 | 2.354 | 3.412 | 7.312 | 10.057 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, Y.; Zheng, K. The Single-Shore-Station-Based Position Estimation Method of an Automatic Identification System. Sensors 2020, 20, 1590. https://doi.org/10.3390/s20061590
Jiang Y, Zheng K. The Single-Shore-Station-Based Position Estimation Method of an Automatic Identification System. Sensors. 2020; 20(6):1590. https://doi.org/10.3390/s20061590
Chicago/Turabian StyleJiang, Yi, and Kai Zheng. 2020. "The Single-Shore-Station-Based Position Estimation Method of an Automatic Identification System" Sensors 20, no. 6: 1590. https://doi.org/10.3390/s20061590
APA StyleJiang, Y., & Zheng, K. (2020). The Single-Shore-Station-Based Position Estimation Method of an Automatic Identification System. Sensors, 20(6), 1590. https://doi.org/10.3390/s20061590