Mechatronics and Remote Driving Control of the Drive-by-Wire for a Go Kart †


Abstract
1. Introduction
2. Mechatronics of the Drive-by-Wire
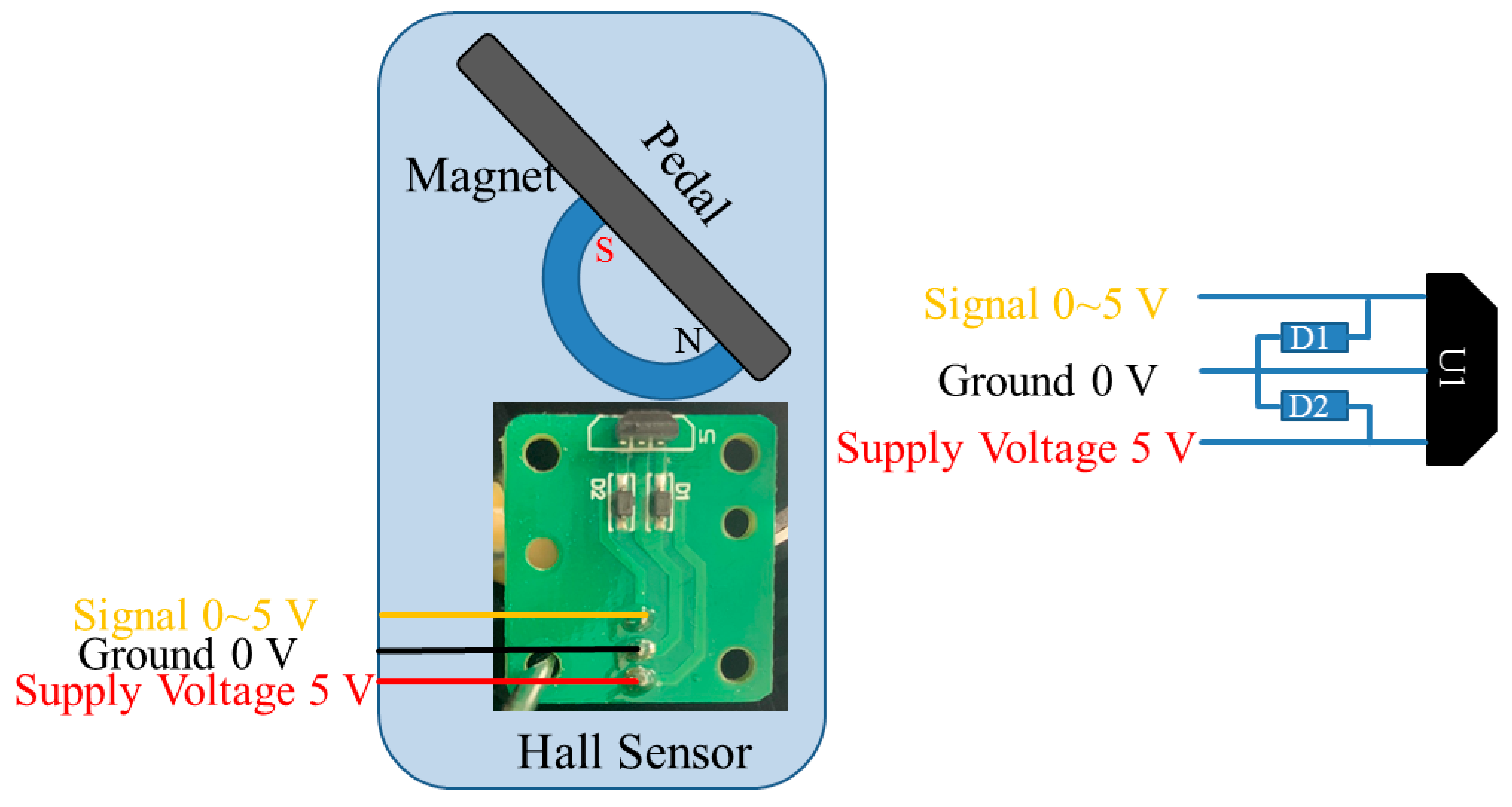
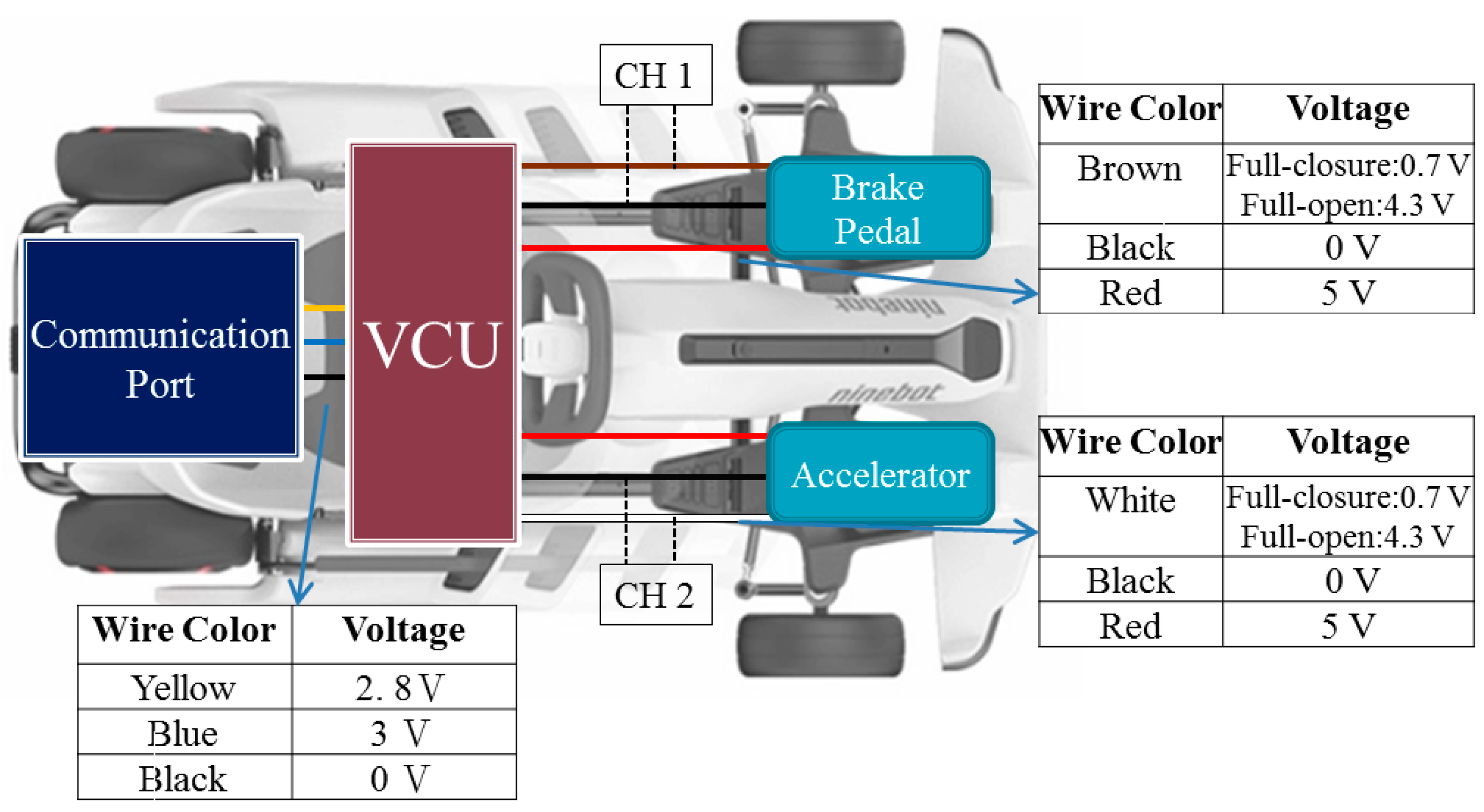
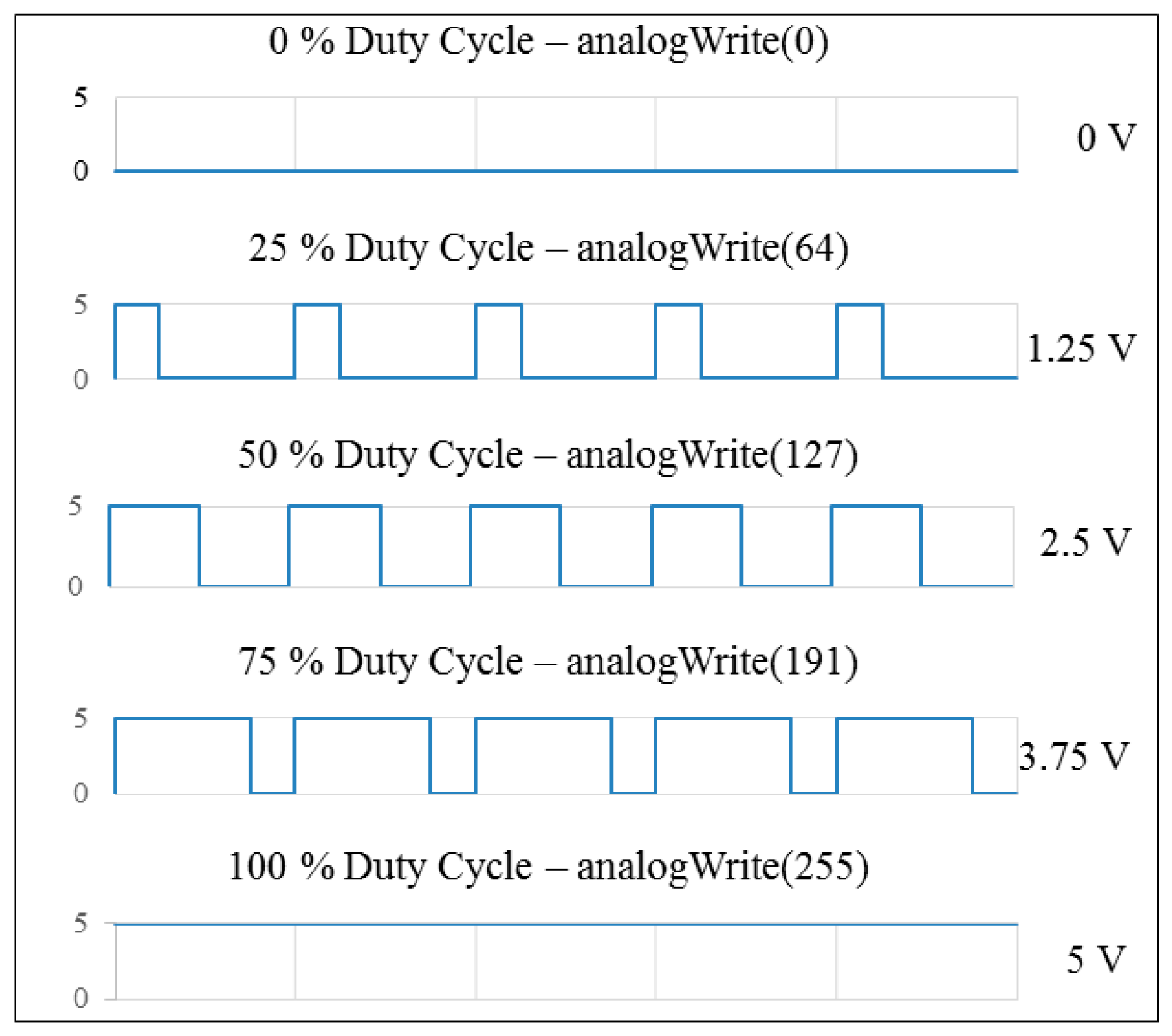
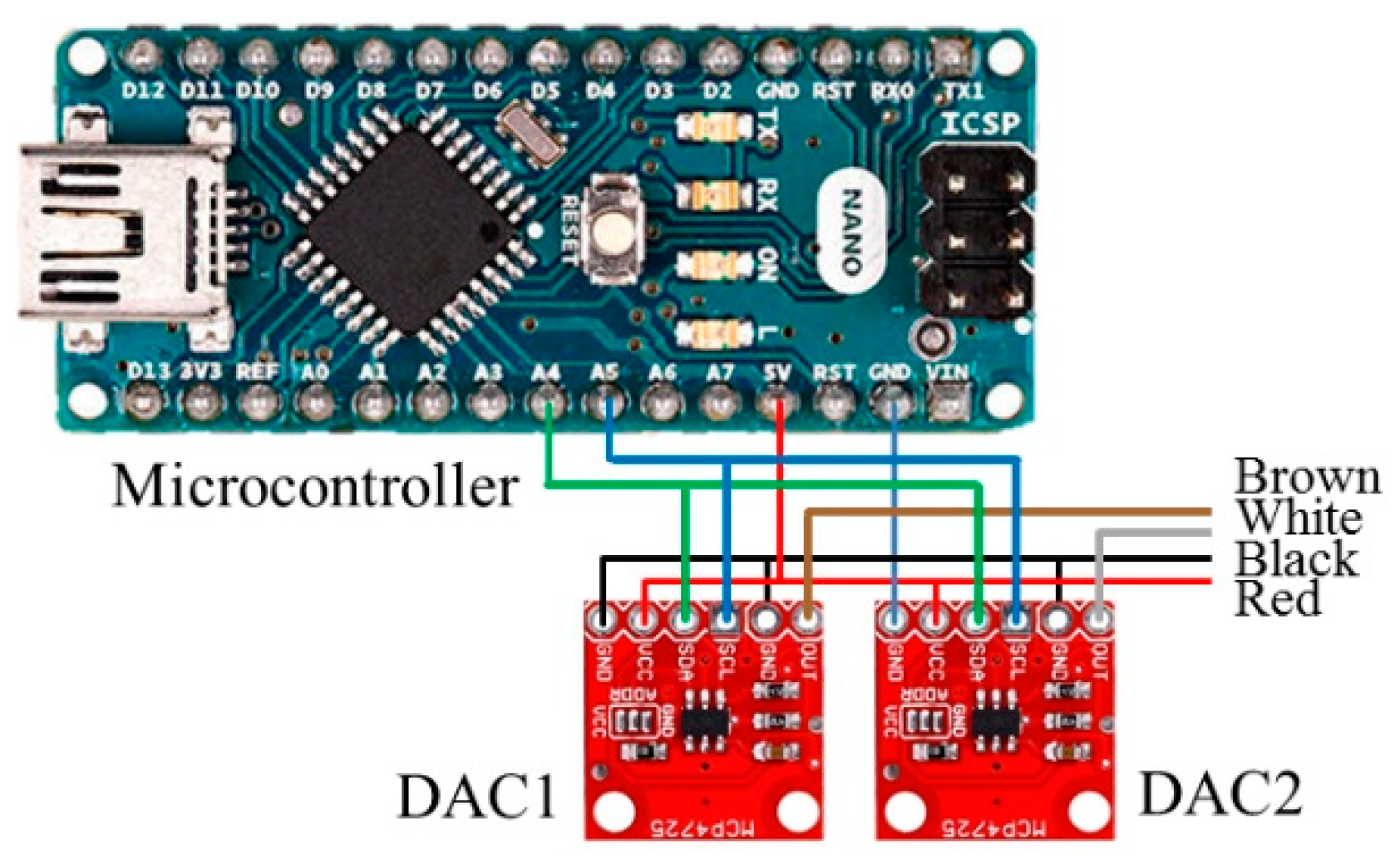
2.1. Hardware Configuration of the Acceleration/Brake-by-Wire System
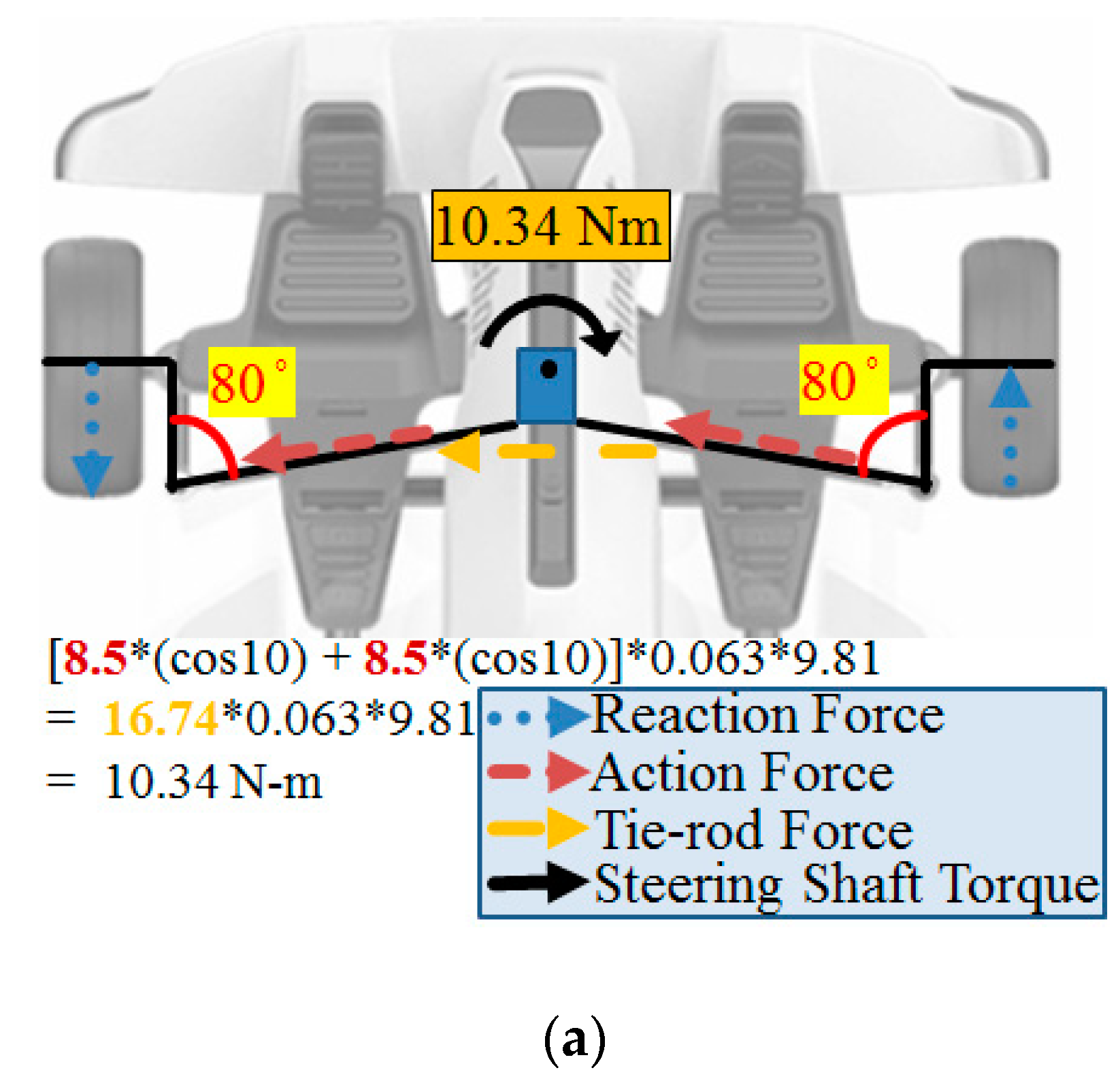
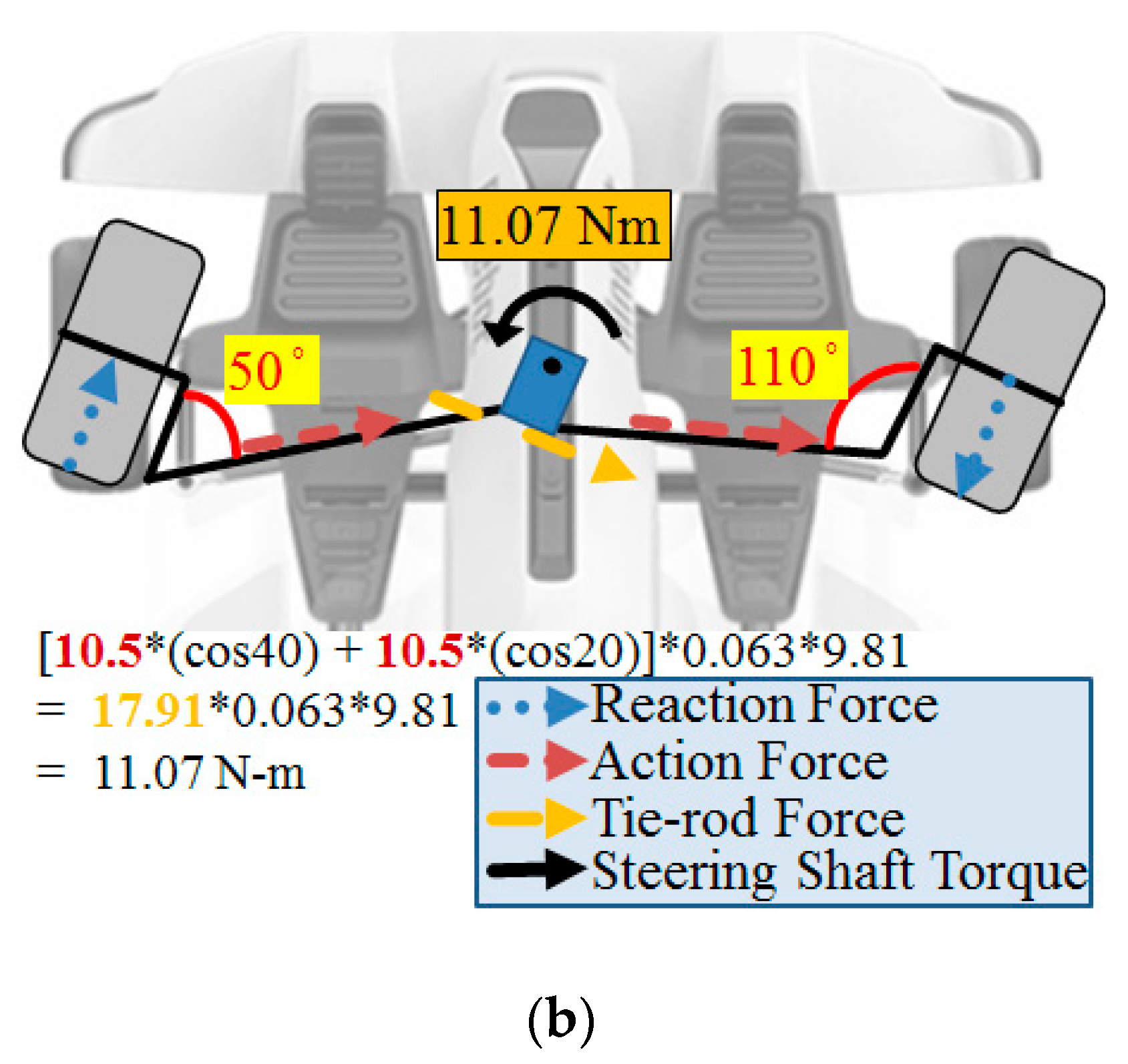
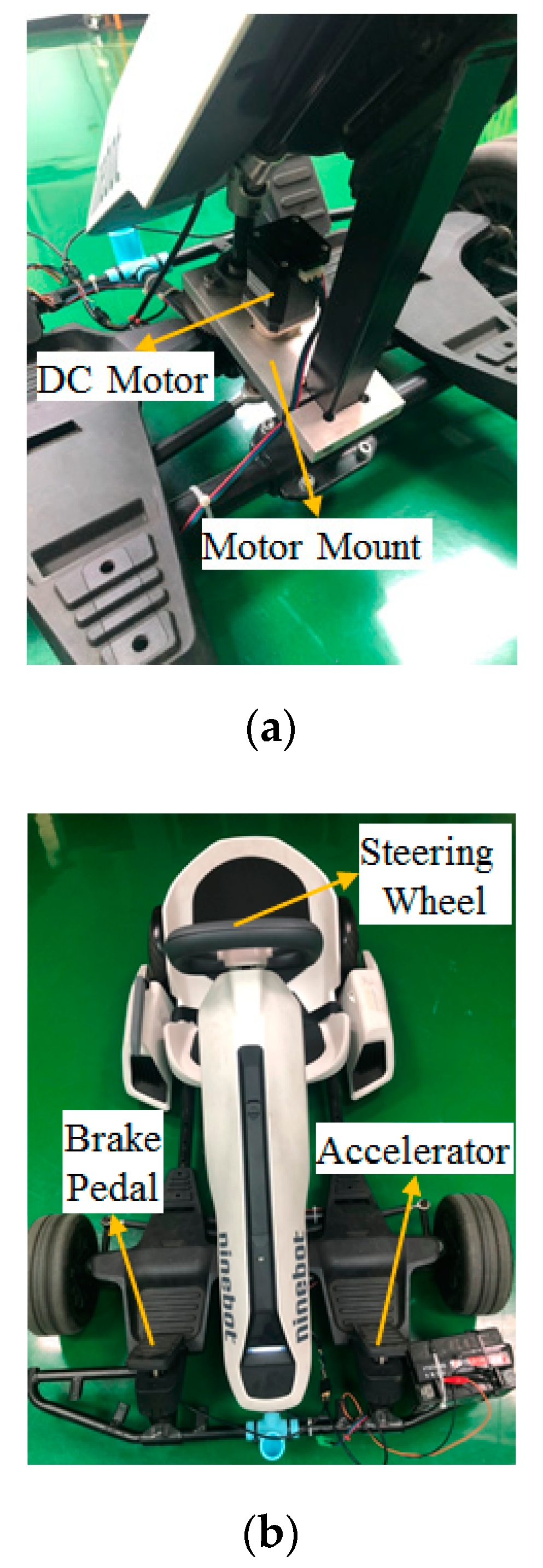
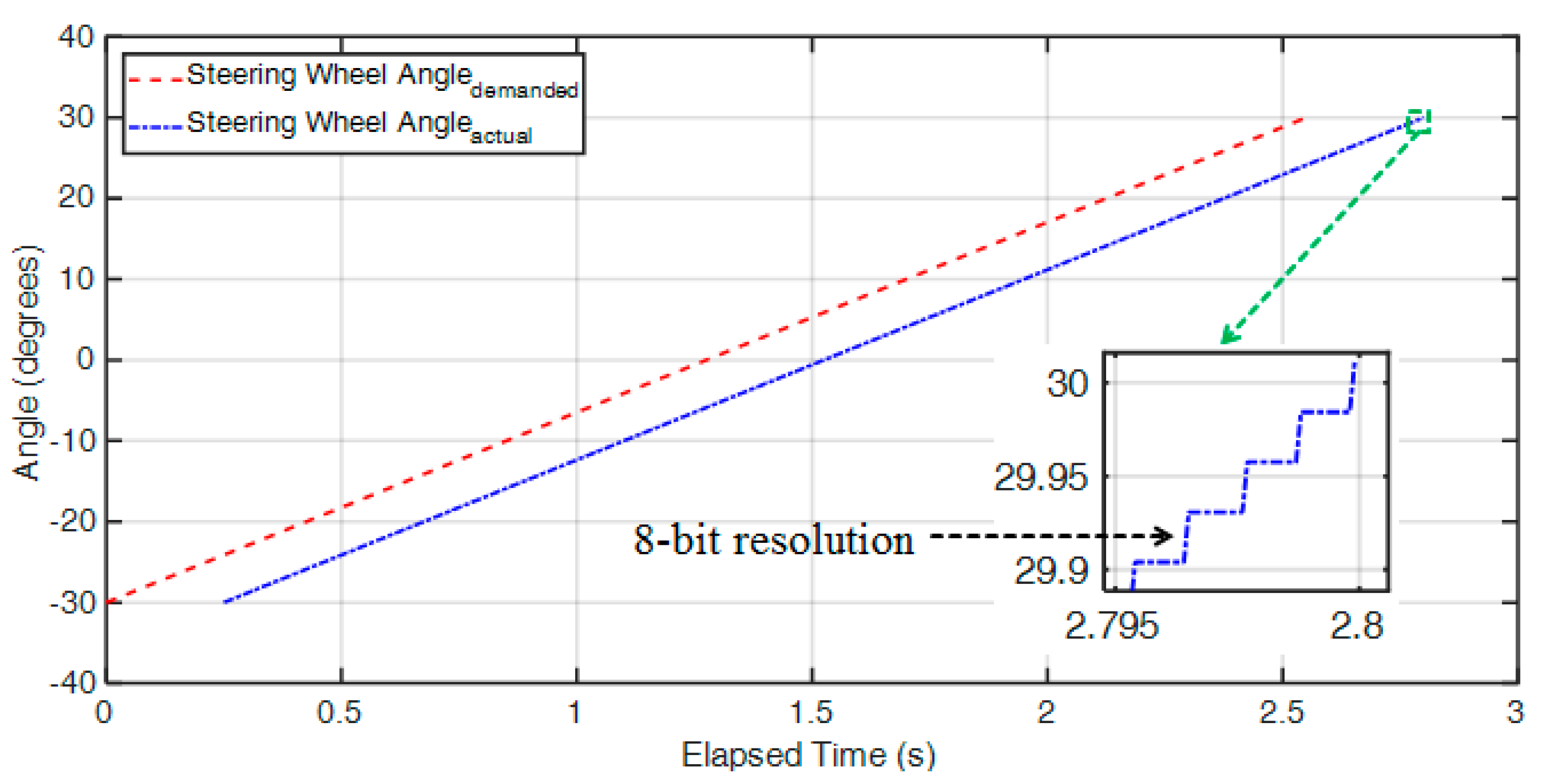
2.2. Mechatronics of the Steer-by-Wire System
3. Mechatronics of the Vehicle Control Unit
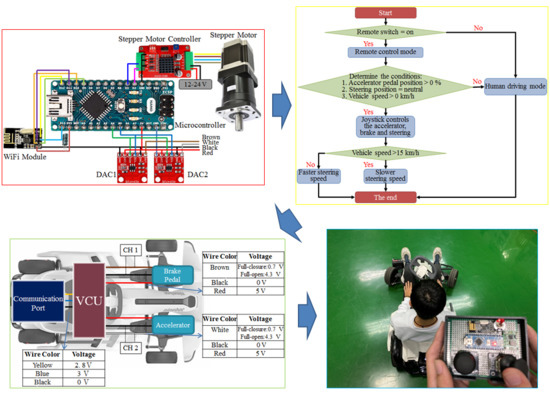
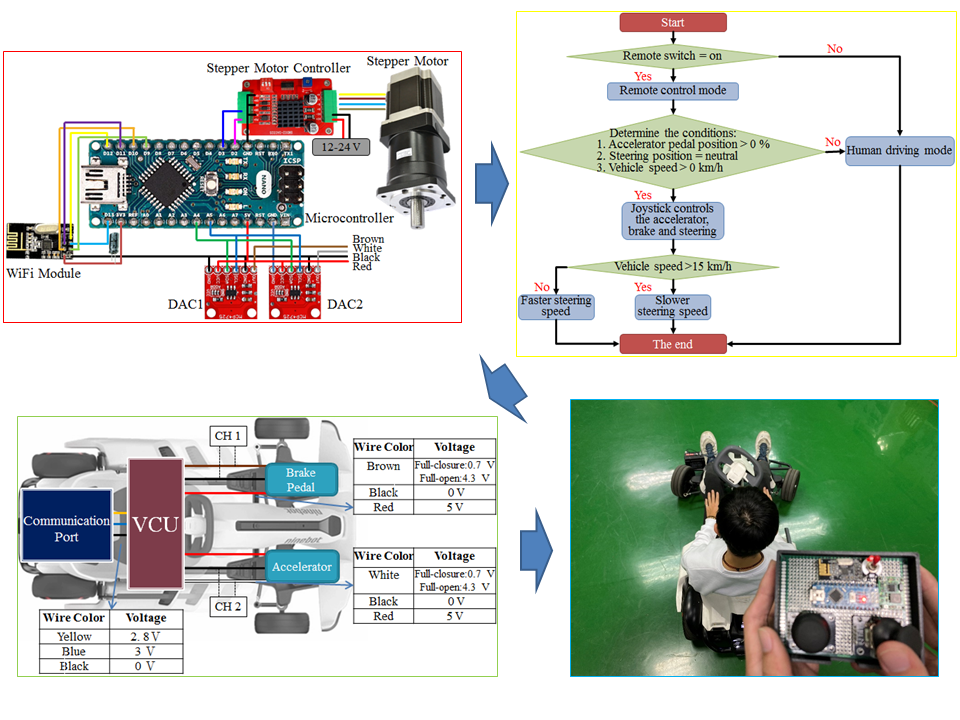
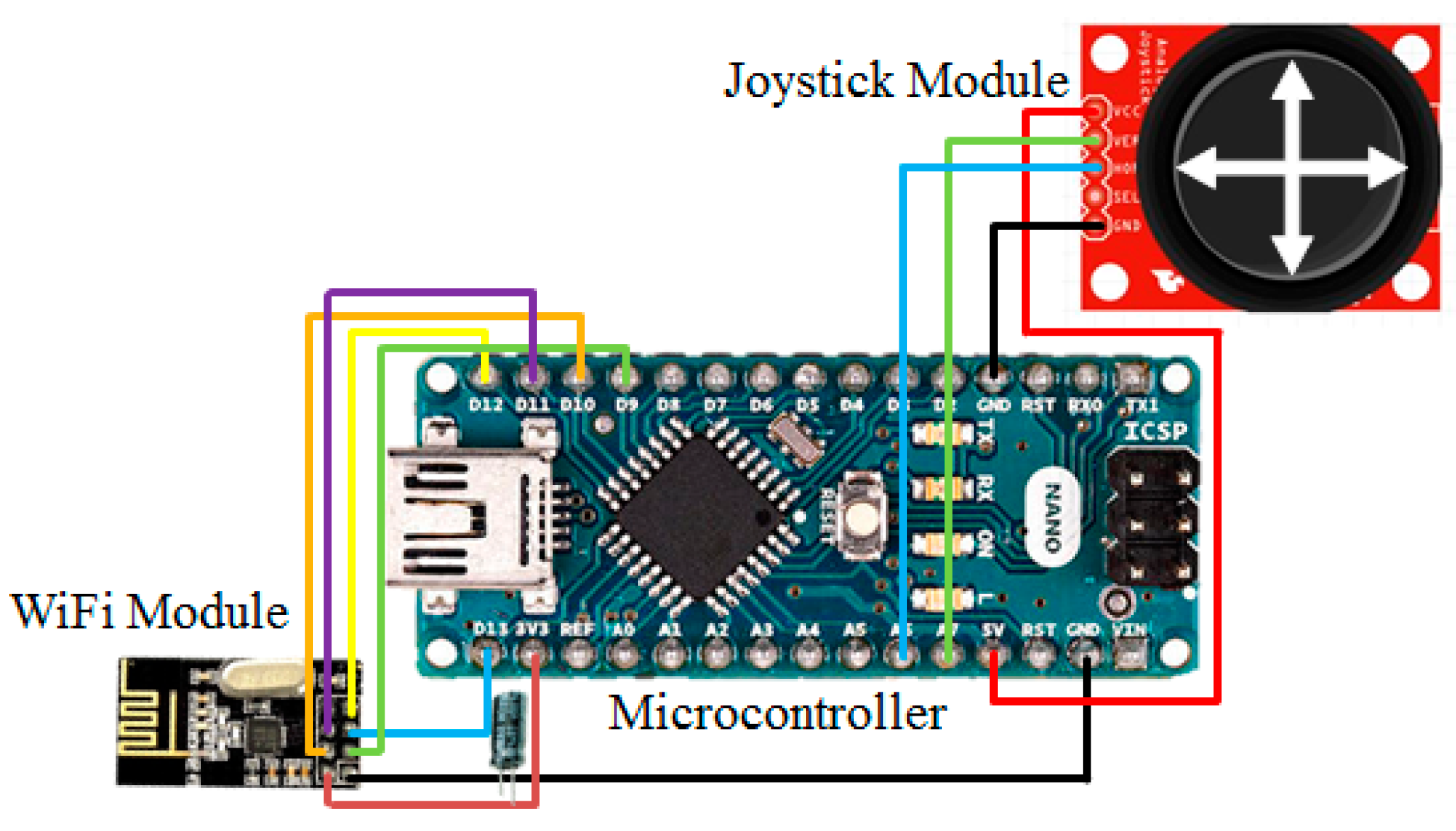
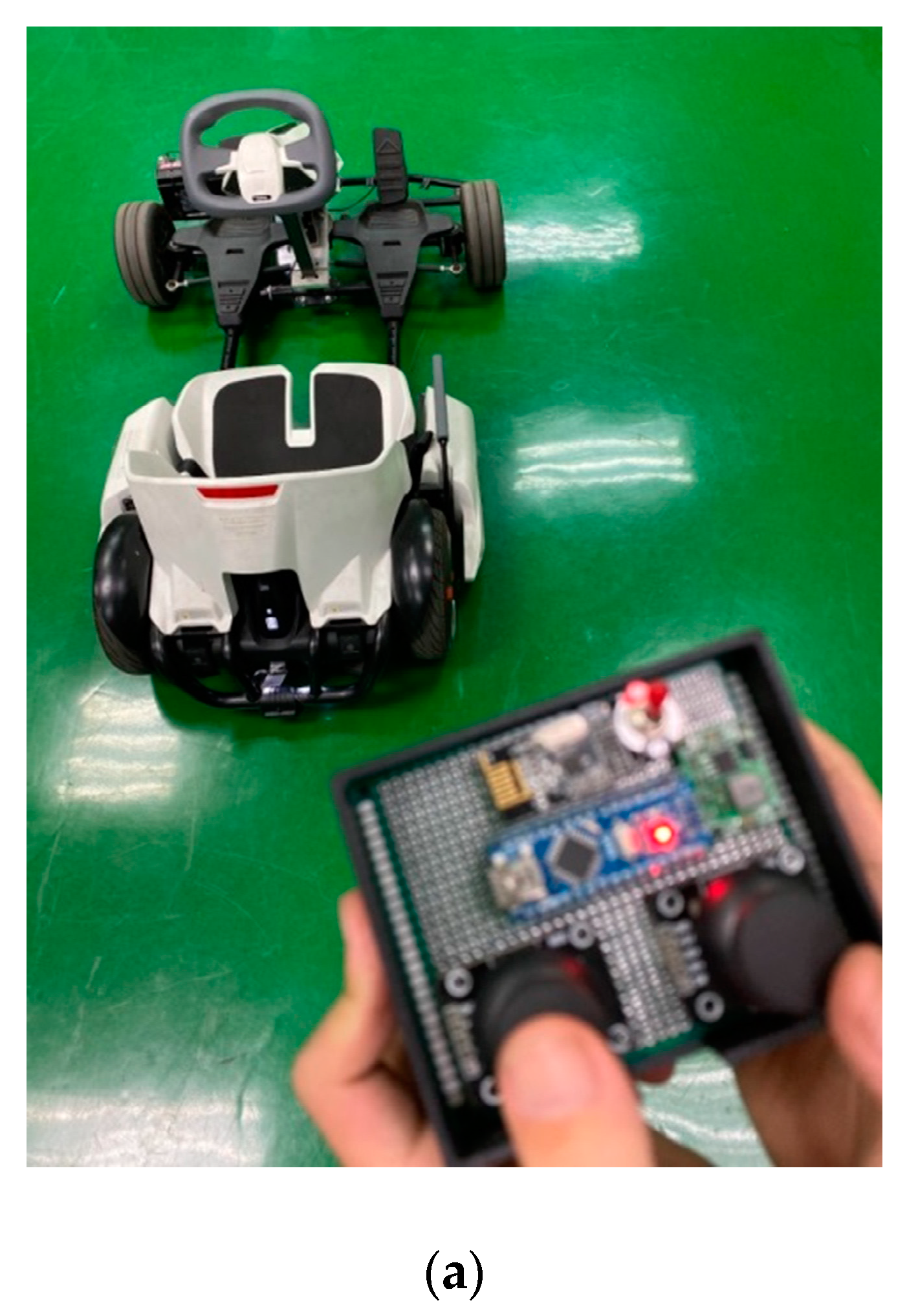
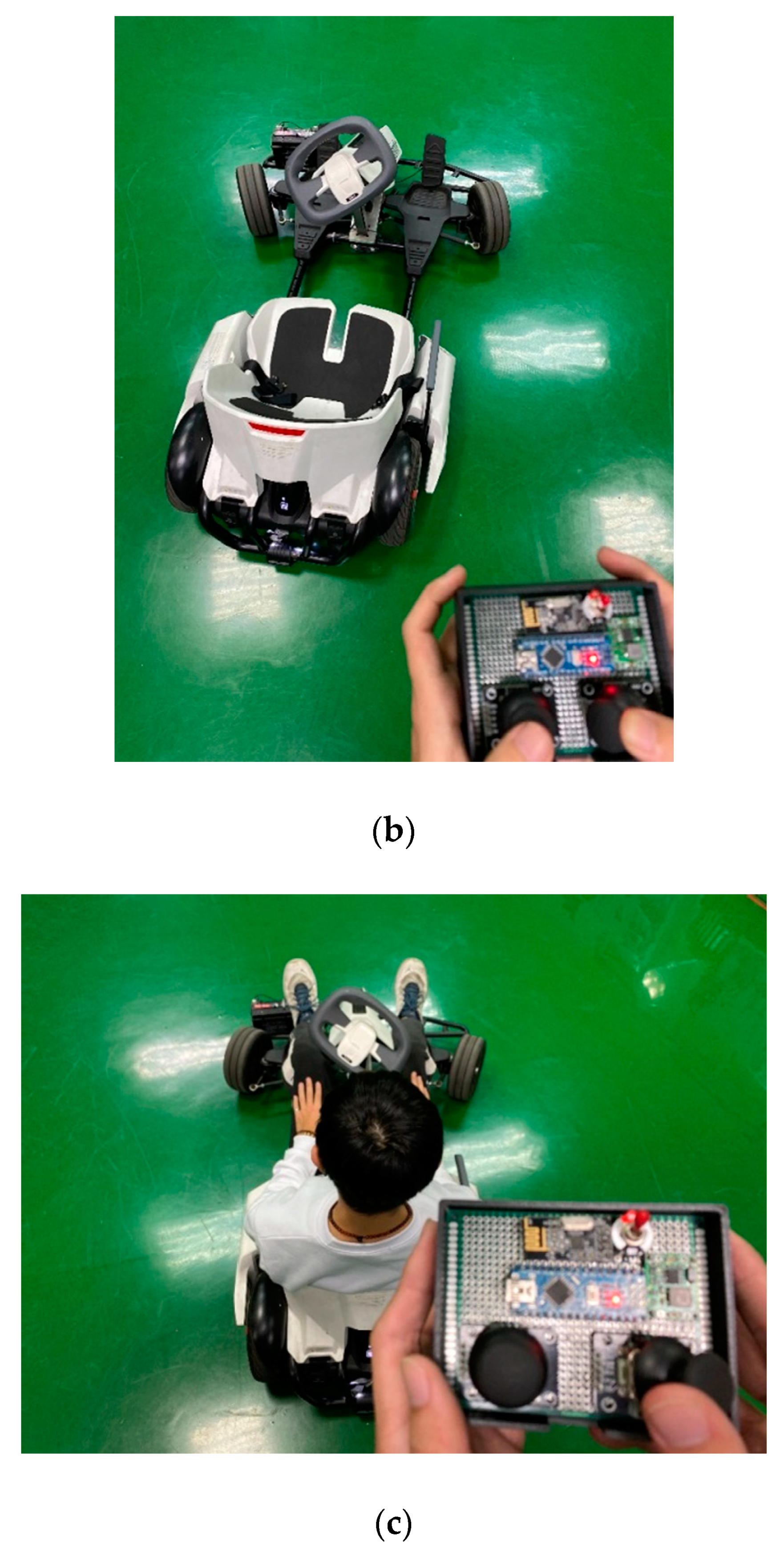
3.1. Hardware Configuration of the Remote Controller
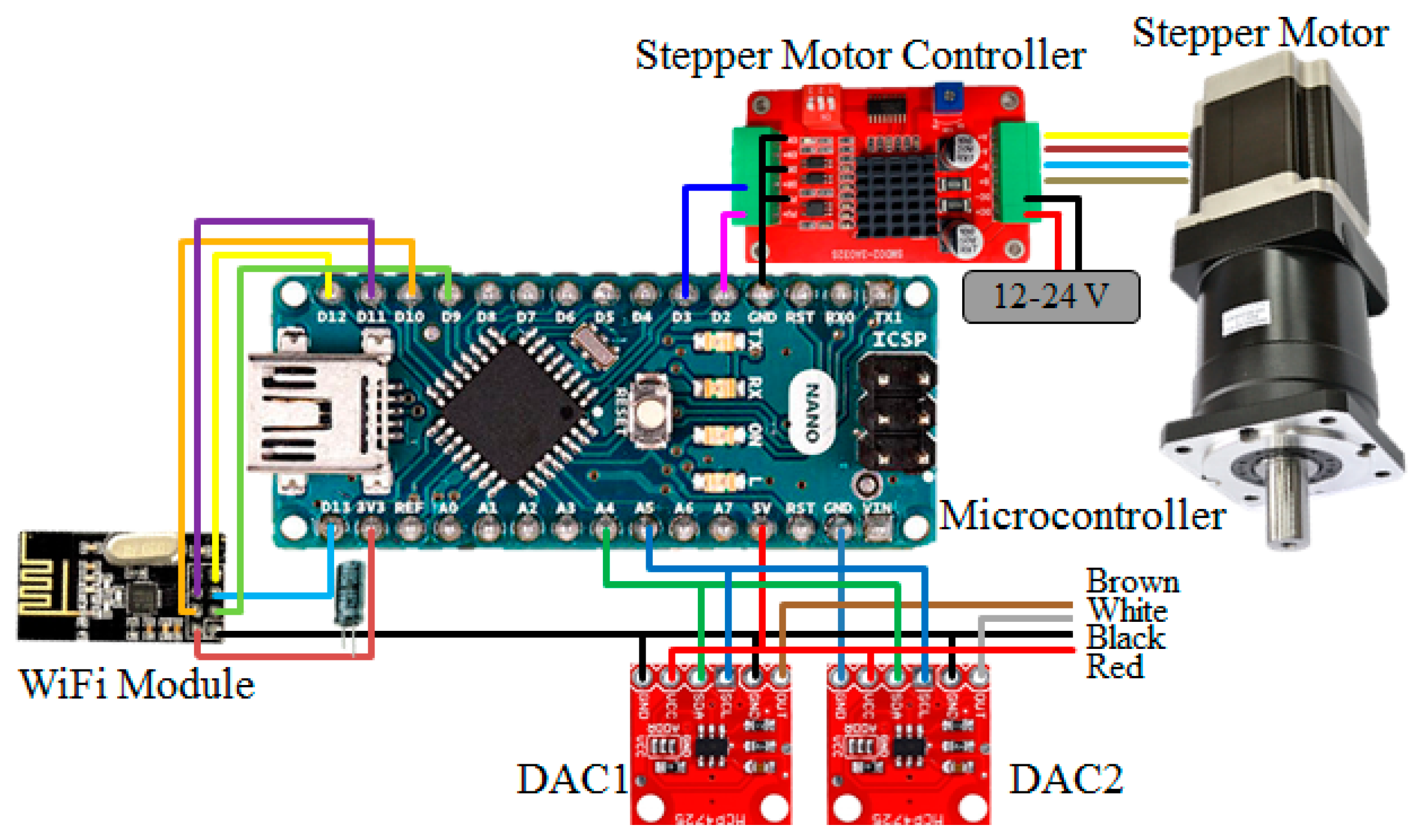
3.2. Hardware Configuration of the Vehicle Control Unit
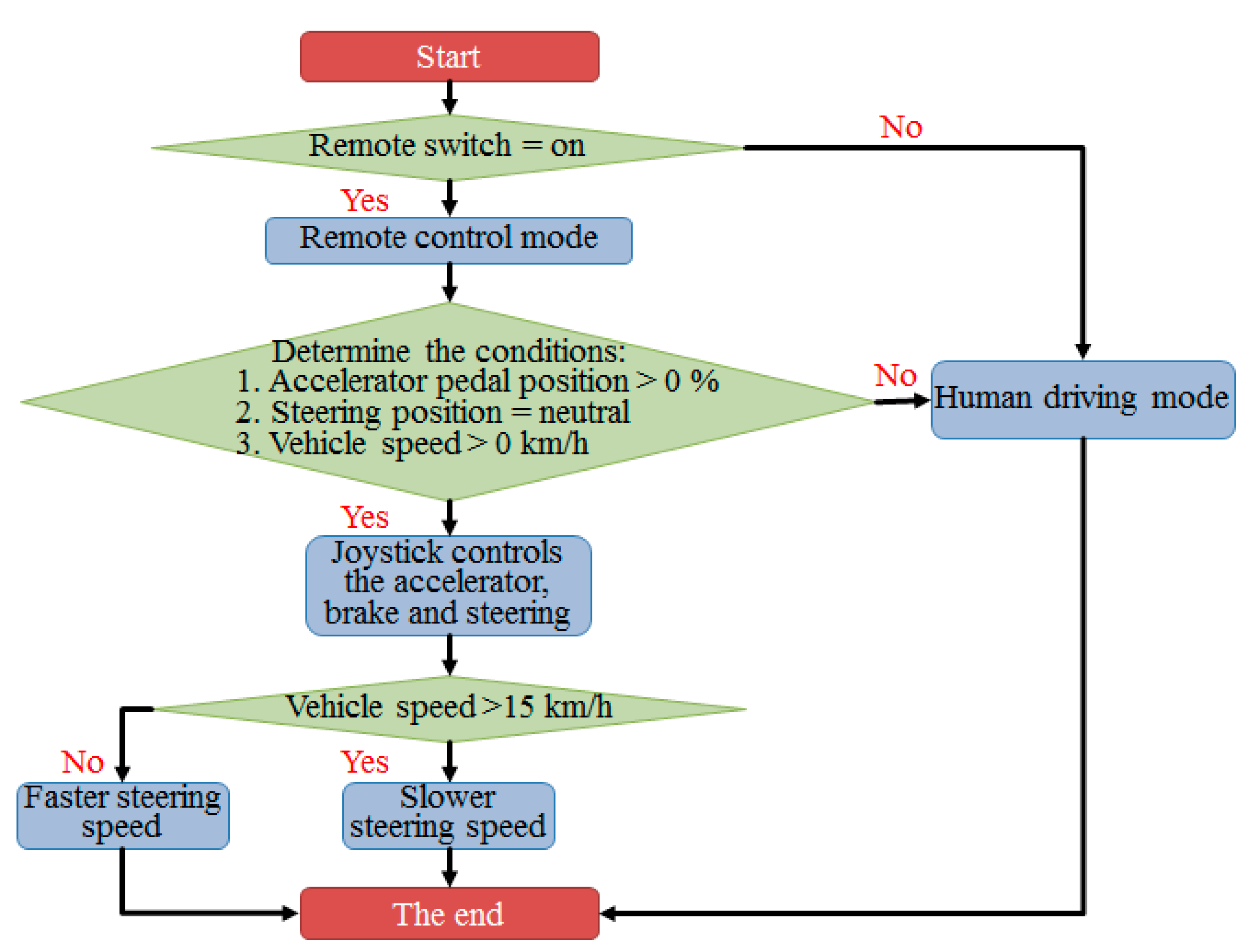
3.3. Control Strategy of the Vehicle Control Unit
4. Experiment Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Judalet, V.; Glaser, S.; Gruyer, D.; Mammar, S. IMM-based sensor fault detection and identification for a drive-by-wire vehicle. IFAC Pap. OnLine 2015, 48, 1158–1164. [Google Scholar] [CrossRef]
- Parsania, P.; Saradava, K. Drive-by-wire systems in automobiles. J. Syst. Comput. 2012, 6, 1–5. [Google Scholar]
- Howser, G.; McMillin, B. Modeling and reasoning about the security of drive-by-wire automobile systems. Int. J. Crit. Infrastruct. Prot. 2012, 5, 127–134. [Google Scholar] [CrossRef]
- Kalinowski, J.; Drage, T.; Bräunl, T. Drive-by-wire for an autonomous formula SAE car. IFAC Proc. 2014, 47, 8457–8462. [Google Scholar] [CrossRef]
- Mokhiamar, O.; Amine, S. Lateral motion control of skid steering vehicles using full drive-by-wire system. Alexandria Eng. J. 2017, 56, 383–394. [Google Scholar] [CrossRef]
- Gruyer, D.; Magnier, V.; Hamdi, K.; Claussmann, L.; Orfila, O.; Rakotonirainy, A. Perception, information processing and modeling: Critical stages for autonomous driving applications. Annu. Rev. Control 2017, 44, 323–341. [Google Scholar] [CrossRef]
- Judalet, V.; Glaser, S.; Gruyer, D.; Mammar, S. Fault detection and isolation via the interacting multiple model approach applied to drive-by-wire vehicles. Sensors 2018, 18, 2332. [Google Scholar] [CrossRef] [PubMed]
- Huang, C.; Naghdy, F.; Du, H.P. Sliding mode predictive tracking control for uncertain steer-by-wire system. Control Eng. Pract. 2019, 85, 194–205. [Google Scholar] [CrossRef]
- Huang, C.; Naghdy, F.; Du, H.P.; Huang, H.L. Fault tolerant steer-by-wire systems: An overview. Annu. Rev. Control 2019, 47, 98–111. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, Q.; Zhu, Q.; Liu, L.; Li, C.; Zheng, D. A survey of mobile laser scanning applications and key techniques over urban areas. Remote Sens. 2019, 11, 1540. [Google Scholar] [CrossRef]
- Gao, K.; Han, F.; Dong, P.; Xiong, N.; Du, R. Connected vehicle as a mobile sensor for real time queue length at signalized intersections. Sensors 2019, 19, 2059. [Google Scholar] [CrossRef] [PubMed]
- Siegel, J.E.; Erb, D.C.; Sarma, S.E. A survey of the connected vehicle landscape—Architectures, enabling technologies, applications, and development areas. IEEE Trans. Intell. Transp. Syst. 2017, 19, 2391–2406. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Steering Wheel Position | Cargo Weight (kg) | Tie-Rod Force (kg) | Steering Shaft Torque (Nm) |
|---|---|---|---|
| Neutral | 70 | 16.74 (Dual Wheel) | 10.34 |
| Extreme | 70 | 17.91 (Dual Wheel) | 11.07 |
| Item | Parameters | ||
|---|---|---|---|
| Go Kart | Weight | Curb (kg) | ≤40 |
| Gross (kg) | 110 | ||
| Propulsion | Motor | Type Peak power (kW) Peak torque (Nm) | Direct Current 2 70 |
| Drive-by-wire | Acceleration-by-wire | Resolution of actual control (bit) Delay time (ms) | 8 1 |
| Brake-by-wire | Resolution of actual control (bit) Delay time (ms) | 8 1 | |
| Steer-by-wire | Resolution of actual control (bit) Delay time (ms) | 8 25 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, C.-H.; Lin, W.-C.; Wang, K.-S. Mechatronics and Remote Driving Control of the Drive-by-Wire for a Go Kart. Sensors 2020, 20, 1216. https://doi.org/10.3390/s20041216
Wu C-H, Lin W-C, Wang K-S. Mechatronics and Remote Driving Control of the Drive-by-Wire for a Go Kart. Sensors. 2020; 20(4):1216. https://doi.org/10.3390/s20041216
Chicago/Turabian StyleWu, Chien-Hsun, Wei-Chen Lin, and Kun-Sheng Wang. 2020. "Mechatronics and Remote Driving Control of the Drive-by-Wire for a Go Kart" Sensors 20, no. 4: 1216. https://doi.org/10.3390/s20041216
APA StyleWu, C.-H., Lin, W.-C., & Wang, K.-S. (2020). Mechatronics and Remote Driving Control of the Drive-by-Wire for a Go Kart. Sensors, 20(4), 1216. https://doi.org/10.3390/s20041216