Indoor NLOS Positioning System Based on Enhanced CSI Feature with Intrusion Adaptability


Abstract
1. Introduction
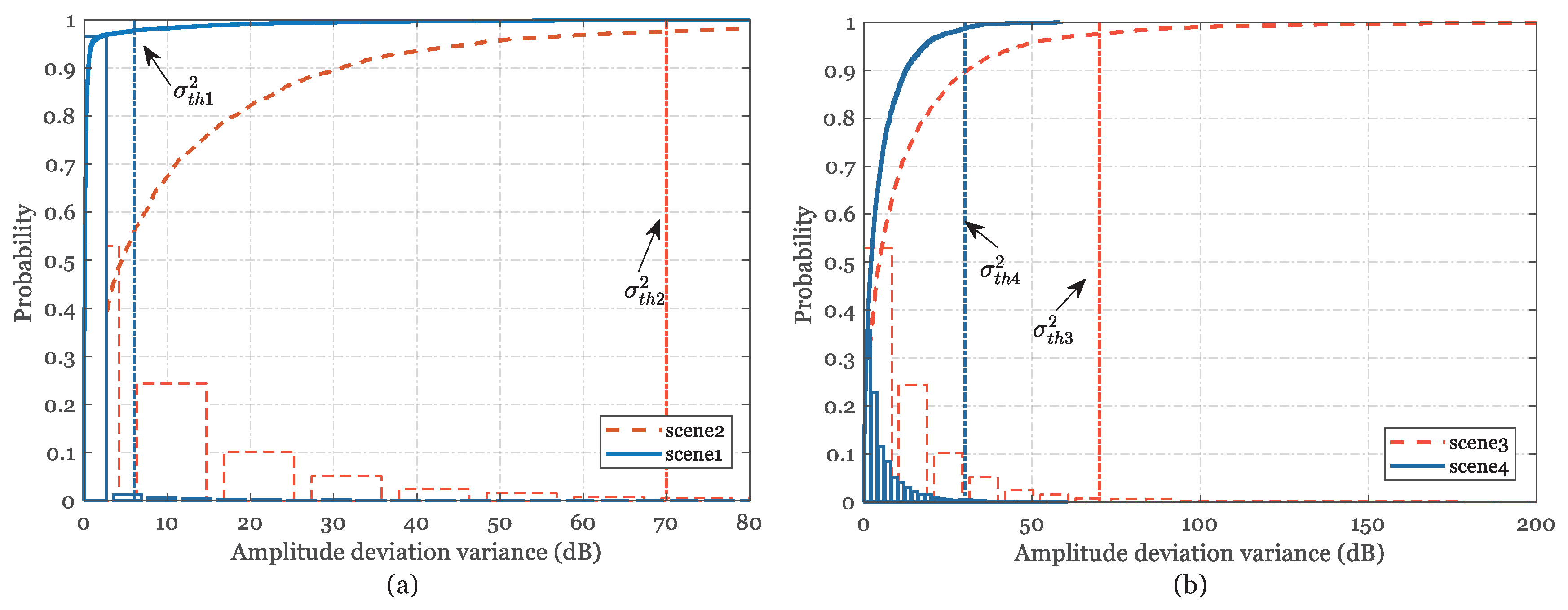
- In order to comprehensively consider the practicability and positioning accuracy, we increase discrimination of both amplitude and phase respectively by filtering the outliers by variance distribution and modified LS calibration method for the linear transformation, simplifying the complex process of signal feature optimization.
- A unified CSI-based framework for indoor positioning is designed for practical scenarios, which alleviates the actual calculation of the system and improves the positioning accuracy under NLOS conditions relatively.
- The B-SVC method in C-InP is utilized for confused intrusion detection under NLOS conditions and an improved multi-class fingerprint positioning method is proposed to realize low-complexity for indoor localization.
- Comprehensive experimental verification is carried out in typical indoor scenarios. Experimental results show that C-InP outperforms the existing system in NLOS environments and effectively reduces the operation time of the system and improves the real-time response.
2. Preliminaries and Challenges
2.1. CSI Introduction
2.1.1. Signal Transmission System Characterization
2.1.2. Multipath Channel Response in Time Domain
2.1.3. Channel Response in Frequency Domain
2.2. Challenges
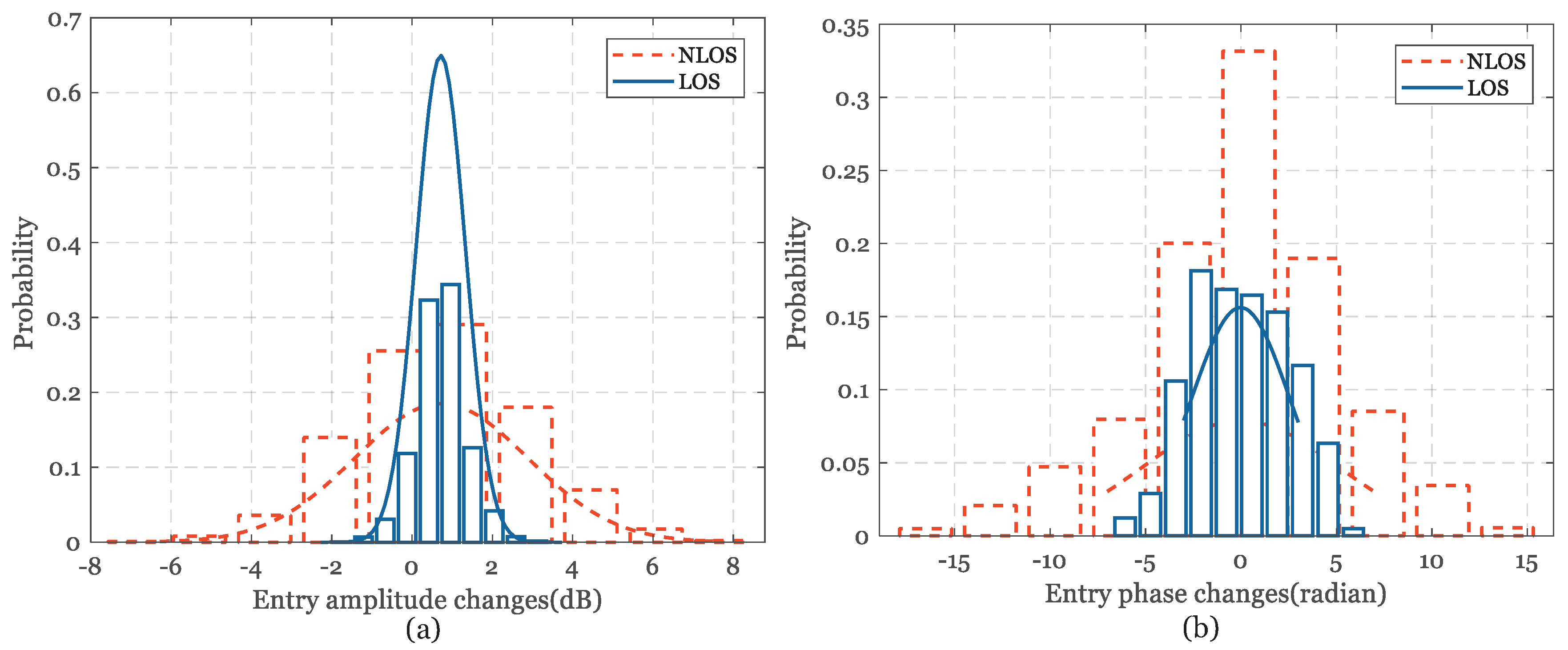
- CSI requires sufficient stability in a static environment. It should be provided with good anti-interference ability of corresponding frequency band signal.
- More importantly, we require an immediate response once the CSI is interfered. Consequently, the intrusion can be accurately identified in the environment covered by wireless devices. The degree of discrimination should be as subtle and sensitive as possible for different interference and environments.
3. Methodology
3.1. Feature Preprocessing in C-InP
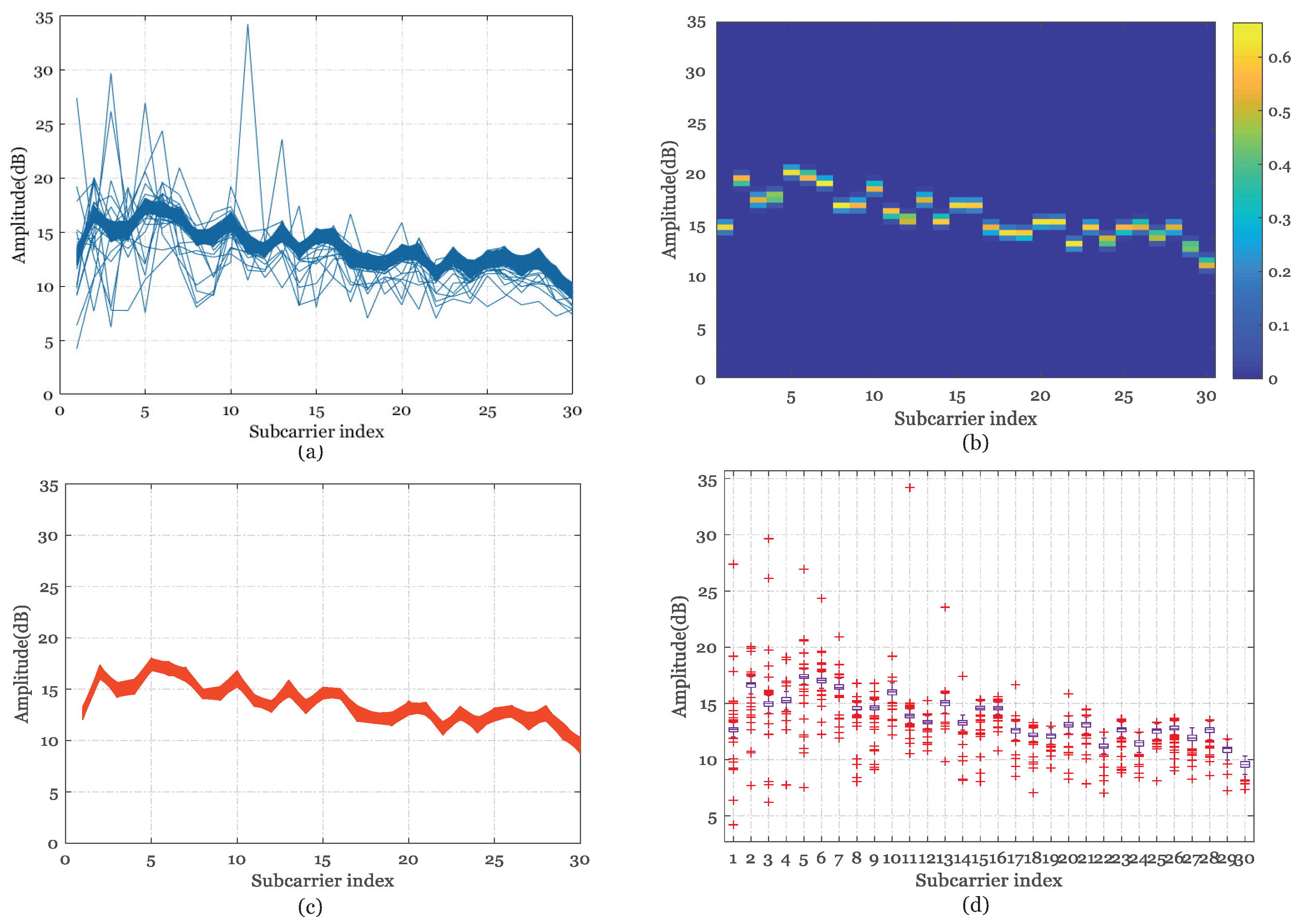
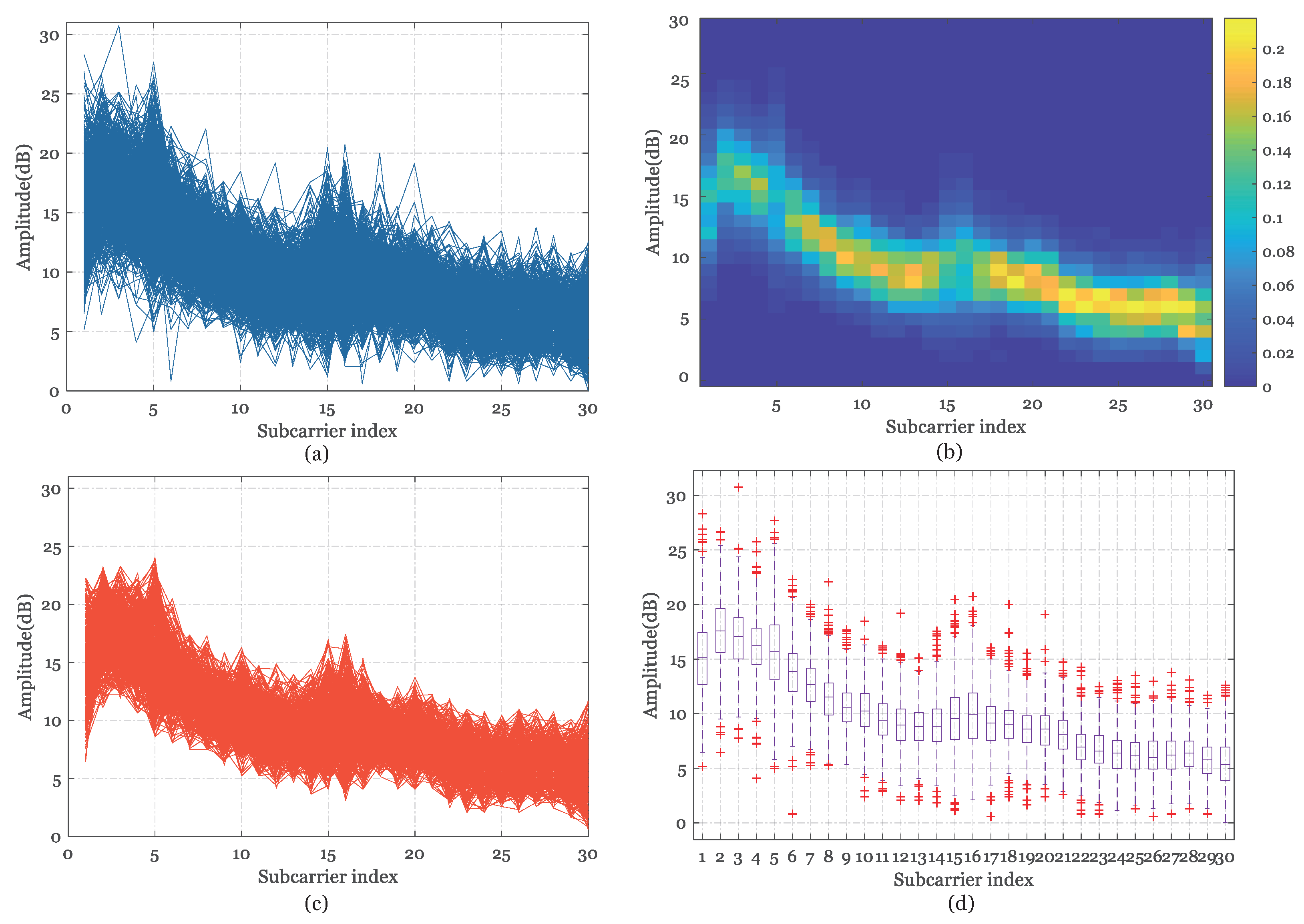
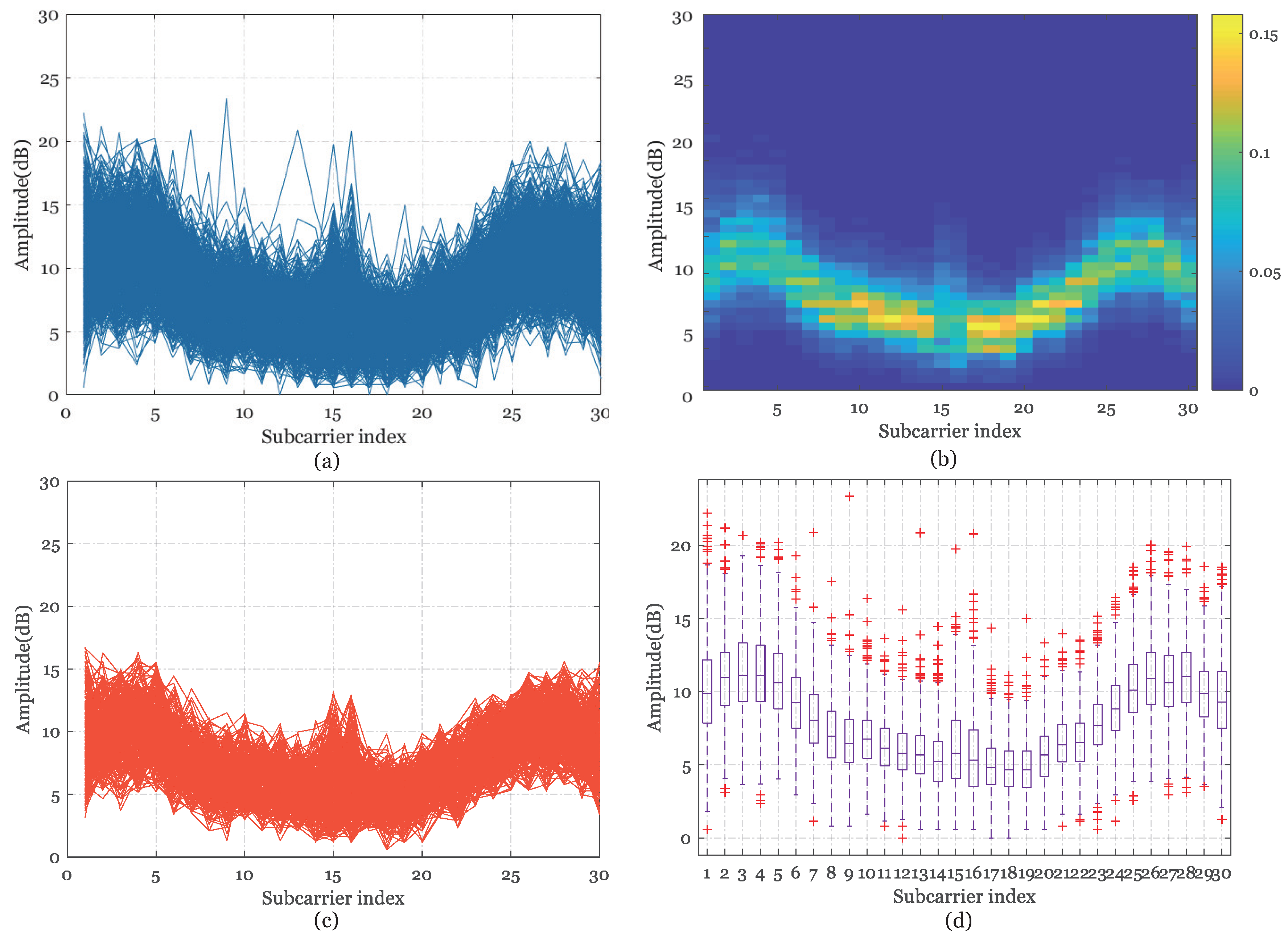
3.1.1. Improved Amplitude Outlier Filtering Method
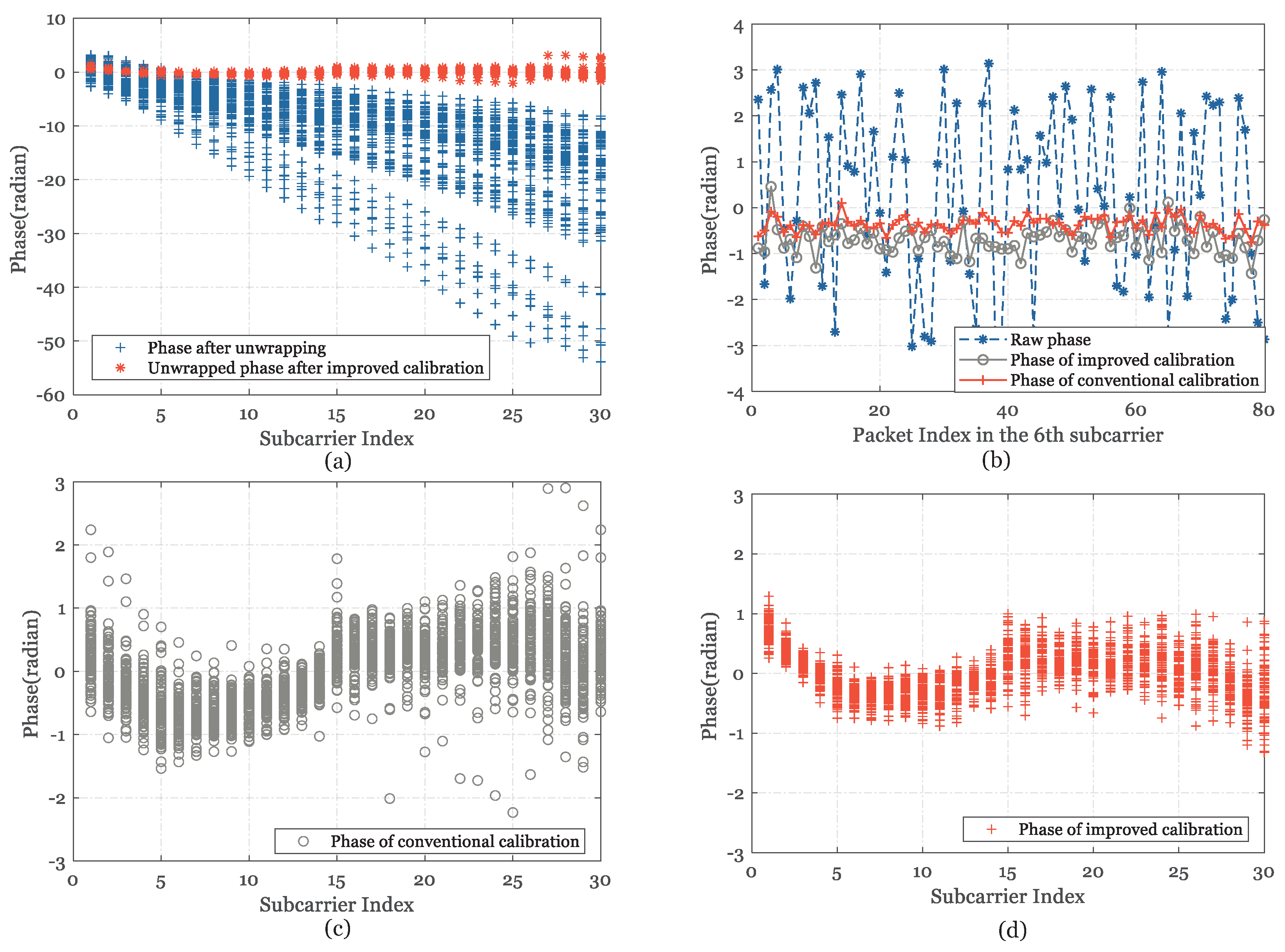
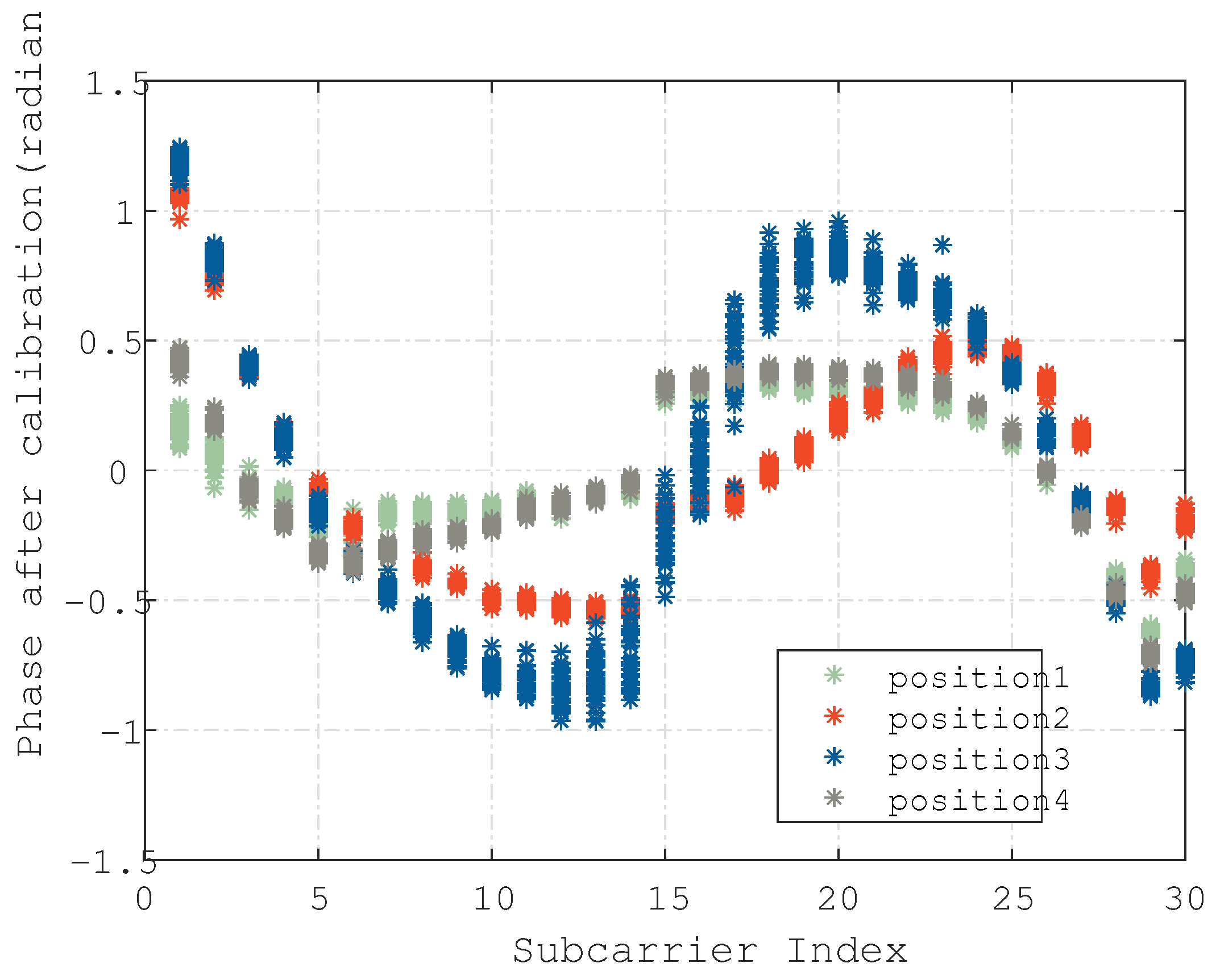
3.1.2. Modified Phase LS calibration
3.2. C-InP—Indoor NLOS Positioning Based on Enhanced CSI Feature with Intrusion Adaptability
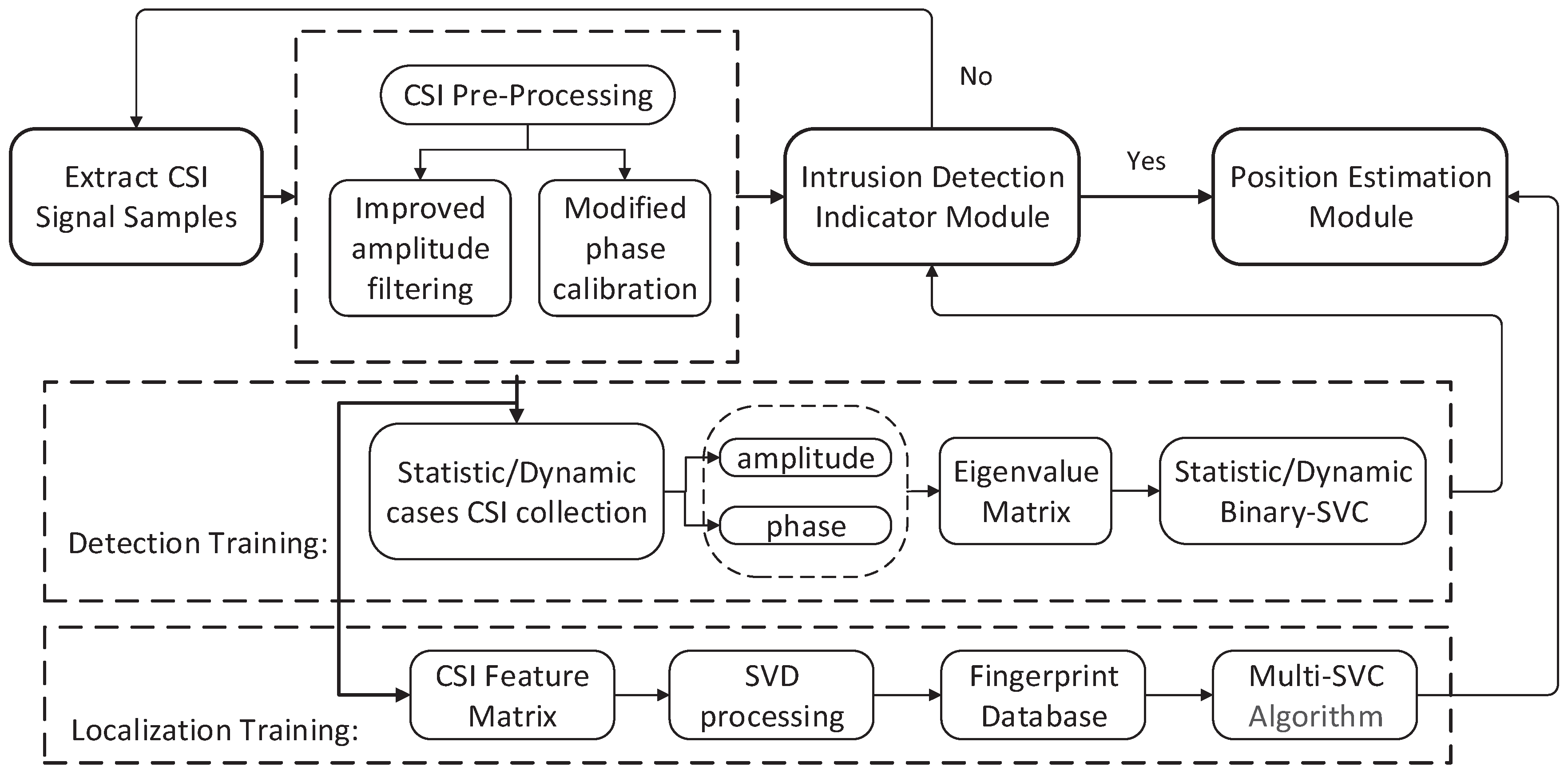
3.2.1. System Architecture of C-InP
3.2.2. Binary-SVC for Intrusion Detection
3.2.3. Improved Multiple-SVC Method for Fingerprint Localization
4. Experiments and Performance Evaluation
4.1. Experimental Setup
4.1.1. CSI Data Collection
4.1.2. Experimental Scenarios
- Spare room: This scene is characterized by the fact that the transmission links are mostly LOS paths, which is beneficial for better comparison of system performance in other scenarios.
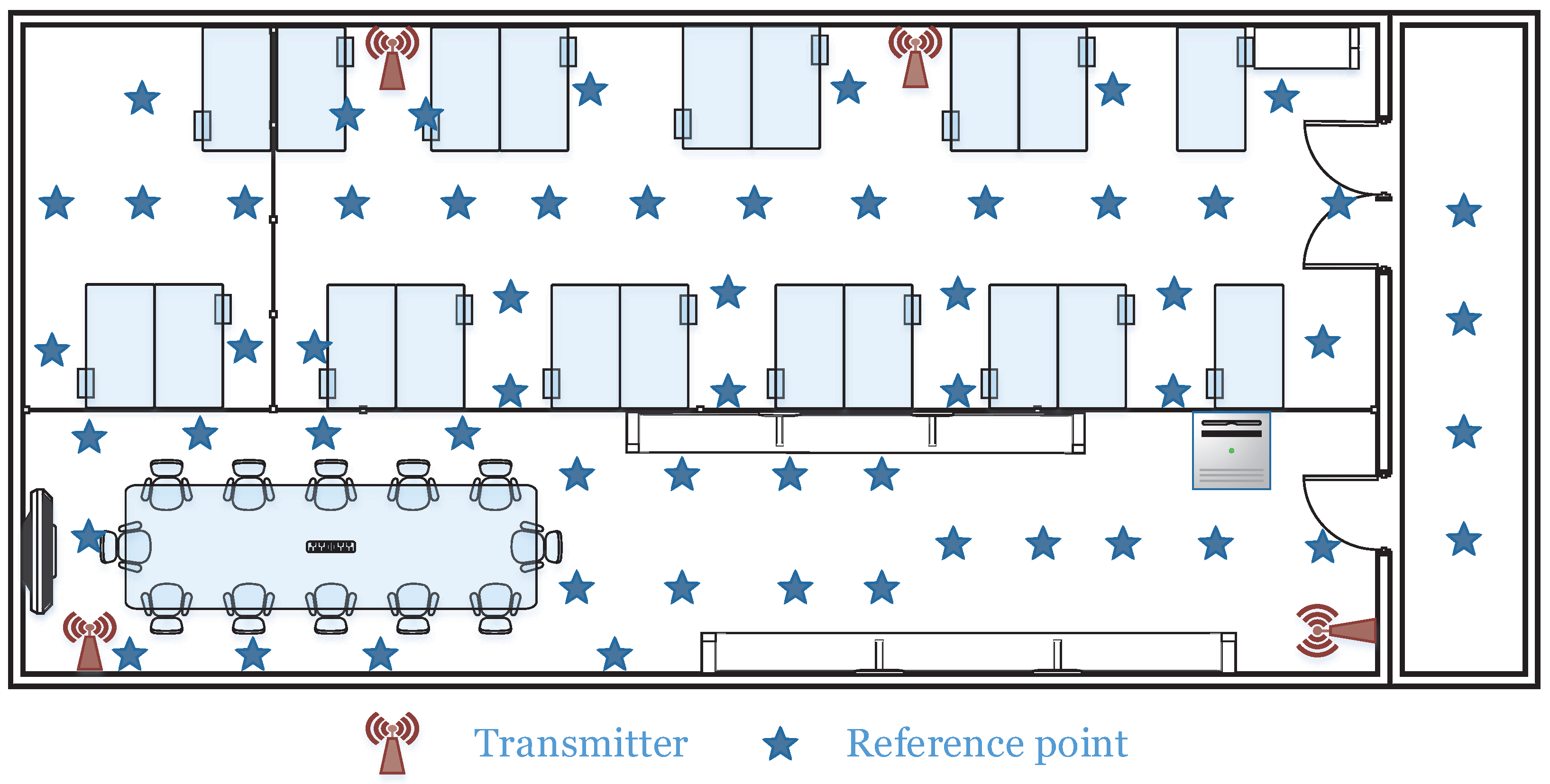
- Integrated NLOS room: Specially, we take NLOS propagation into consideration. We deploy the experiment in a integrated room environment of 8 m × 16.5 m, which contains a single laboratory (scene 2 mentioned in Section 3) and a meeting room and is separated by a glass wall, as shown in Figure 14a. Due to the complex indoor environment, we place four receiving terminals with a height of about 2.3 m to ensure the transmission of CSI signals. The receivers are respectively fixed at the reference category shown in Figure 15. The transmitter then moves progressively along a predetermined route maintaining a height of 1.4 m.
- Complex garage: In addition, we also selected an underground parking garage to verify system performance, as shown in Figure 14b. In order to adapt to the relatively large area of the environment, the interval between every two reference points is 1.5 m which is larger than other two scenes. As a representative experimental scenario, the impact of basement environment on experimental performance can be further explored.
4.2. Evaluation Metrics
- True Positive (TP)—the ratio of instances where an existed intrusion is correctly detected.
- True Negative (TN)—the fraction of cases where no intrusion presence is correctly identified.
- Accuracy—the probability of making the right judgment about the invasion and vacancy.
4.3. Performance Evaluation
4.3.1. Performance of Detecting Intrusion
4.3.2. Performance of Indoor Localization
4.3.3. Comparison of Different Preprocessing Methods for Both Amplitude and Phase
4.3.4. Effect of Different Parameter K in SVD for the Improved Multiple-SVC Method
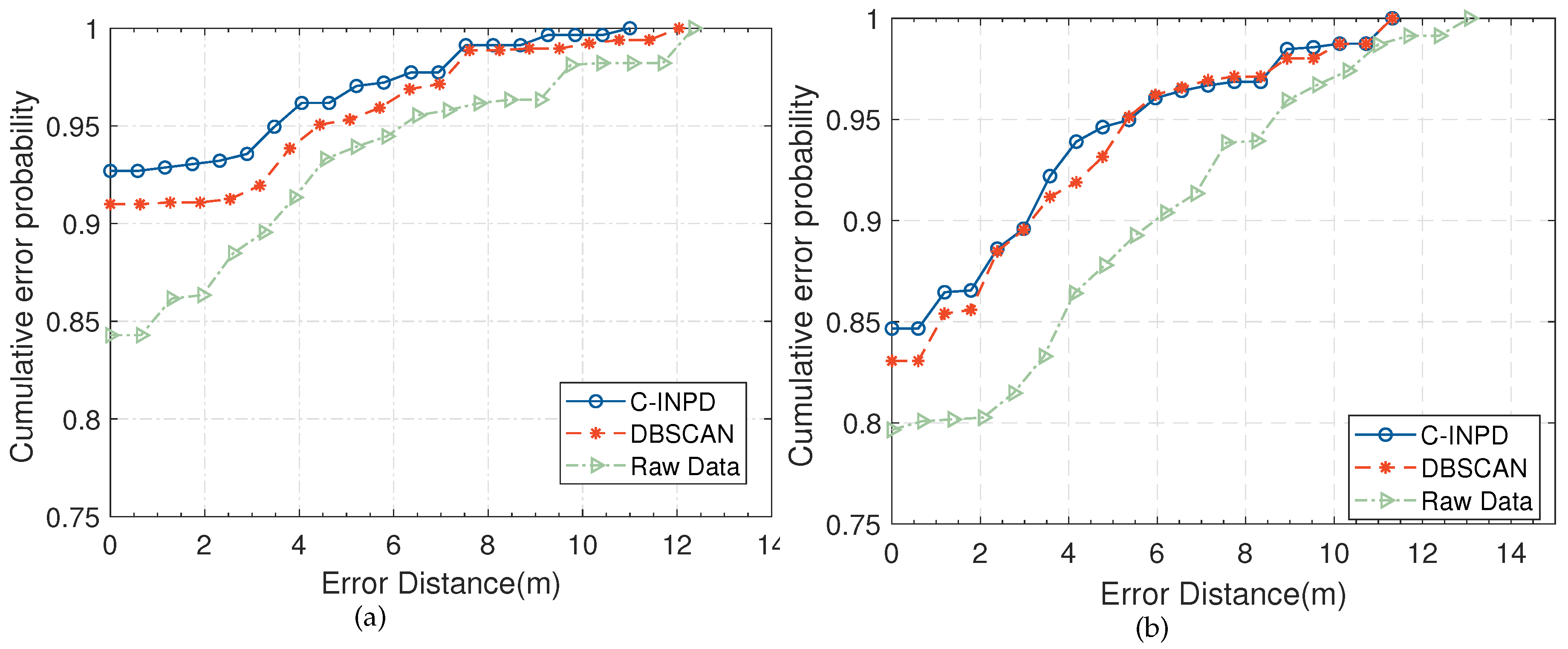
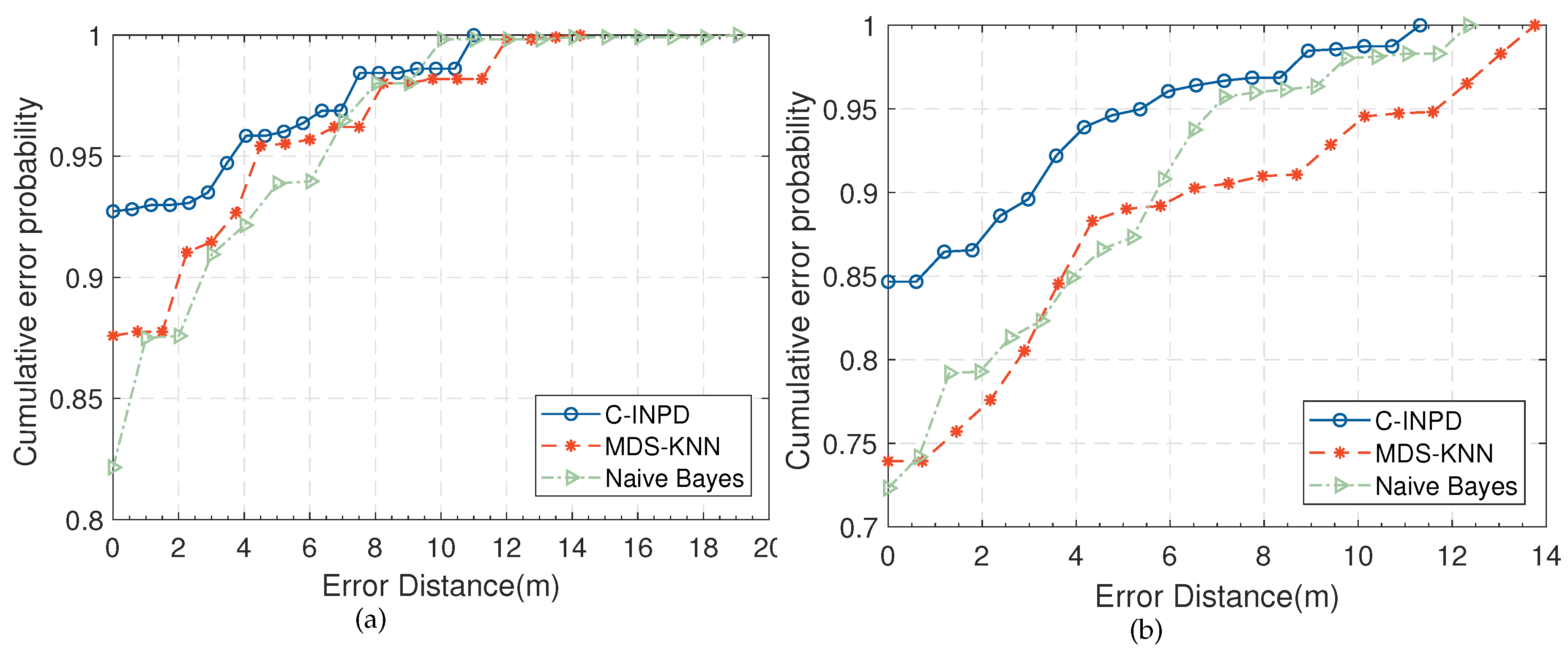
4.3.5. Performance Comparison of Different Positioning Systems
4.4. Discussion of the Proposed Methods in C-InP
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zeng, Y.; Pathak, P.H.; Mohapatra, P. WiWho: Wifi-based person identification in smart spaces. In Proceedings of the 15th International Conference on Information Processing in Sensor Networks, Vienna, Austria, 11–14 April 2016; pp. 1–12. [Google Scholar]
- Marquez, A.; Tank, B.; Meghani, S.K.; Ahmed, S.; Tepe, K. Accurate UWB and IMU based indoor localization for autonomous robots. In Proceedings of the IEEE 30th Canadian Conference on Electrical and Computer Engineering (CCECE), Windsor, ON, Canada, 30 April–3 May 2017; pp. 1–4. [Google Scholar]
- Li, Z.; Zhao, X.; Hu, F.; Zhao, Z.; Villacrés, J.L.C.; Braun, T. SoiCP: A Seamless Outdoor–Indoor Crowdsensing Positioning System. IEEE Internet Things 2019, 6, 8626–8644. [Google Scholar] [CrossRef]
- Makki, A.; Siddig, A.; Saad, M.; Bleakley, C. Survey of WiFi positioning using time-based techniques. Comput. Netw. 2015, 88, 218–233. [Google Scholar] [CrossRef]
- Zhu, H.; Xiao, F.; Sun, L.; Wang, R.; Yang, P. R-TTWD: Robust device-free through-the-wall detection of moving human with WiFi. IEEE J. Sel. Areas Commun. 2017, 35, 1090–1103. [Google Scholar] [CrossRef]
- Endo, Y.; Sato, K.; Yamashita, A.; Matsubayashi, K. Indoor positioning and obstacle detection for visually impaired navigation system based on LSD-SLAM. In Proceedings of the 2017 International Conference on Biometrics and Kansei Engineering (ICBAKE), Kyoto, Japan, 15–17 September 2017; pp. 158–162. [Google Scholar]
- Chan, S.H.; Wu, P.T.; Fu, L.C. Robust 2D Indoor Localization Through Laser SLAM and Visual SLAM Fusion. In Proceedings of the 2018 IEEE International Conference on Systems Man, and Cybernetics (SMC), Miyazaki, Japan, 7–10 October 2018; pp. 1263–1268. [Google Scholar]
- Xia, H.; Zuo, J.; Liu, S.; Qiao, Y. Indoor Localization on Smartphones Using built-in Sensors and Map Constraints. IEEE Trans. Instrum. Meas. 2018, 68, 1189–1198. [Google Scholar] [CrossRef]
- He, S.N.; Chan, S.H. Wi-Fi fingerprint-based indoor positioning: Recent advances and comparisons. IEEE Commun. Surv. Tut. 2016, 18, 466–490. [Google Scholar] [CrossRef]
- Kandel, L.N.; Yu, S. Indoor Localization Using Commodity Wi-Fi APs: Techniques and Challenges. In Proceedings of the 2019 International Conference on Computing, Networking and Communications (ICNC), Honolulu, HI, USA, 18–21 February 2019; pp. 526–530. [Google Scholar]
- Deng, Z.; Fu, X.; Wang, H. An IMU-aided Body-Shadowing Error Compensation Method for Indoor Bluetooth Positioning. Sensors 2018, 18, 304. [Google Scholar] [CrossRef]
- Luo, R.C.; Hsiao, T.J. Indoor Localization System Based on Hybrid Wi-Fi/BLE and Hierarchical Topological Fingerprinting Approach. IEEE Trans. Veh. Technol. 2019, 68, 10791–10806. [Google Scholar] [CrossRef]
- Peng, C.; Shen, G.; Zhang, Y.; Li, Y.; Tan, K. Beepbeep: A High Accuracy Acoustic Ranging System Using Cots Mobile Devices. In Proceedings of the 5th International Conference on Embedded Networked Sensor Systems, Sydney, Australia, 5–7 Noverber 2007; pp. 1–14. [Google Scholar]
- Hanssens, B.; Plets, D.; Tanghe, E.; Oestges, C.; Gaillot, D.P.; Liénard, M.; Li, T.; Steendam, H.; Martens, L.; Joseph, W. An indoor variance-based localization technique utilizing the UWB estimation of geometrical propagation parameters. IEEE Trans. Antennas Propag. 2018, 66, 2522–2533. [Google Scholar] [CrossRef]
- Gururaj, K.; Rajendra, A.K.; Song, Y.; Law, C.L.; Cai, G. Real-time identification of NLOS range measurements for enhanced UWB localization. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–7. [Google Scholar]
- Wu, C.; Yang, Z.; Zhou, Z.; Qian, K.; Liu, Y.; Liu, M. PhaseU: Real-time LOS identification with WiFi. In Proceedings of the IEEE Conference on Computer Communications (INFOCOM), Kowloon, Hong Kong, China, 26 Apri–1 May 2015; pp. 2038–2046. [Google Scholar]
- Yu, K.; Wen, K.; Li, Y.; Zhang, S.; Zhang, K. A Novel NLOS Mitigation Algorithm for UWB Localization in Harsh Indoor Environments. IEEE Trans. Veh. Technol. 2019, 68, 686–699. [Google Scholar] [CrossRef]
- Wu, K.; Xiao, J.; Yi, Y.; Gao, M.; Ni, L.M. Fila: Fine-grained indoor localization. In Proceedings of the IEEE INFOCOM, Orlando, FL, USA, 25–30 March 2012; pp. 2210–2218. [Google Scholar]
- Wu, Z.; Xu, Q.; Li, J.; Fu, C.; Xuan, Q.; Xiang, Y. Passive Indoor Localization Based on CSI and Naive Bayes Classification. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 1566–1577. [Google Scholar] [CrossRef]
- Halperin, D.; Hu, W.; Sheth, A.; Wetherall, D. Tool release: Gathering 802.11 n traces with channel state information. ACM SIGCOMM Comput. Commun. Rev. 2011, 41, 53. [Google Scholar] [CrossRef]
- Xiao, J.; Wu, K.; Yi, Y.; Ni, L.M. FIFS: Fine-grained indoor fingerprinting system. In Proceedings of the 21st International Conference on Computer Communications and Networks, Munich, Germany, 30 July–2 August 2012; pp. 1–7. [Google Scholar]
- Song, Q.; Guo, S.; Liu, X.; Yang, Y. CSI amplitude fingerprinting-based NB-IoT indoor localization. IEEE Internet Things 2018, 5, 1494–1504. [Google Scholar] [CrossRef]
- Wang, X.; Gao, L.; Mao, S. CSI phase fingerprinting for indoor localization with a deep learning approach. IEEE Internet Things 2016, 3, 1113–1123. [Google Scholar] [CrossRef]
- Qian, K.; Wu, C.; Yang, Z.; Liu, Y.; He, F.; Xing, T. Enabling Contactless Detection of Moving Humans with Dynamic Speeds Using CSI. ACM Trans. Embedded Comput. Syst. (TECS) 2018, 17, 1–18. [Google Scholar] [CrossRef]
- Wu, C.; Yang, Z.; Zhou, Z.; Liu, X.; Liu, Y.; Cao, J. Non-invasive detection of moving and stationary human with wifi. IEEE J. Sel. Areas Commun. 2015, 33, 2329–2342. [Google Scholar] [CrossRef]
- Yousefi, S.; Narui, H.; Dayal, S.; Ermon, S.; Valaee, S. A survey on behavior recognition using wifi channel state information. IEEE Commun. Mag. 2017, 55, 98–104. [Google Scholar] [CrossRef]
- Zou, Y.; Liu, W.; Wu, K.; Ni, L.M. Wi-Fi radar: Recognizing human behavior with commodity Wi-Fi. IEEE Commun. Mag. 2017, 55, 105–111. [Google Scholar] [CrossRef]
- Zhou, Z.; Yang, Z.; Wu, C.; Shangguan, S.G.; Cai, H.; Liu, Y.; Ni, L.M. WiFi-Based Indoor Line-of-Sight Identification. IEEE Trans. Wirel. Commun. 2015, 14, 6125–6136. [Google Scholar] [CrossRef]
- Cheng, L.; Wang, J. Walls Have No Ears: A Non-Intrusive WiFi-Based User Identification System for Mobile Devices. IEEE/ACM Trans. Netw. (TON) 2019, 27, 245–257. [Google Scholar] [CrossRef]
- Gao, Q.; Wang, J.; Ma, X.; Feng, X.; Wang, H. CSI-based device-free wireless localization and activity recognition using radio image features. IEEE Trans. Veh. Technol. 2017, 66, 10346–10356. [Google Scholar] [CrossRef]
- Wang, G.; Zou, Y.; Zhou, Z.; Wu, K.; Ni, L.M. We can hear you with wi-fi! IEEE Trans. Mob. Comput. 2016, 15, 2907–2920. [Google Scholar] [CrossRef]
- Di Domenico, S.; De Sanctis, M.; Cianca, E.; Giuliano, F.; Bianchi, G. Exploring training options for RF sensing using CSI. IEEE Commun. Mag. 2018, 56, 116–123. [Google Scholar] [CrossRef]
- Di Domenico, S.; De Sanctis, M.; Cianca, E.; Ruggieri, M. WiFi-based through-the-wall presence detection of stationary and moving humans analyzing the doppler spectrum. IEEE Aerosp. Electron. Syst. Mag. 2018, 33, 14–19. [Google Scholar] [CrossRef]
- Sen, S.; Radunovic, B.; Choudhury, R.R.; Minka, T. You are facing the Mona Lisa: Spot localization using PHY layer information. In Proceedings of the 10th International Conference on Mobile Systems, Applications, and Services, Low Wood Bay, UK, 25–29 June 2012; pp. 183–196. [Google Scholar]
- Kotaru, M.; Joshi, K.; Bharadia, D.; Katti, S. Spotfi: Decimeter level localization using wifi. In Proceedings of the 2015 ACM Conference on Special Interest Group on Data Communication, London, UK, 17–21 August 2015; pp. 269–282. [Google Scholar]
- Zhu, H.; Zhuo, Y.; Liu, Q.; Chang, S. π-splicer: Perceiving accurate CSI phases with commodity WiFi devices. IEEE Trans. Mob. Comput. 2018, 17, 2155–2165. [Google Scholar] [CrossRef]
- Jana, S.; Kasera, S.K. On fast and accurate detection of unauthorized wireless access points using clock skews. IEEE Trans. Mob. Comput. 2010, 9, 449–462. [Google Scholar] [CrossRef]
- Zhuo, Y.; Zhu, H.; Xue, H.; Chang, S. Perceiving accurate CSI phases with commodity WiFi devices. In Proceedings of the IEEE Conference on Computer Communications, Atlanta, GA, USA, 1–4 May 2017; pp. 1–9. [Google Scholar]
- Bertsekas, D.P. Nonlinear programming. J. Oper. Res. Soc. 1997, 48, 334. [Google Scholar] [CrossRef]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: New York, NY, USA, 2004. [Google Scholar]
- Weston, J.; Watkins, C. Support vector machines for multi-class pattern recognition. Esann 1999, 99, 219–224. [Google Scholar]
- Chang, C.C.; Lin, C.J. LIBSVM: A library for support vector machines. ACM Trans. Intell. Syst. Technol. (TIST) 2011, 2, 27. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Spare Room | Integrated NLOS Room | Complex Garage |
|---|---|---|---|
| Size (m2) | |||
| Interval (m) | 0.8 | 1.2 | 1.5 |
| Access points | 1 | 4 | 3 |
| Cells | 20 | 58 | 56 |
| Scenes | Method | Accuracy | MDE (m) |
|---|---|---|---|
| Integrated NLOS room | C-InP | 92.59% | 0.49 |
| DBSCAN | 90.60% | 0.58 | |
| Raw data | 82.68% | 0.88 | |
| Complex Garage | C-InP | 84.60% | 0.81 |
| DBSCAN | 83.12% | 0.92 | |
| Raw data | 79.30% | 1.39 |
| Scenes | System | Runtime (s) |
|---|---|---|
| Integrated room | C-InP | 0.933 |
| Improved M-SVC | 1.154 | |
| MDS-KNN | 0.691 | |
| NB | 0.550 | |
| Complex Garage | C-InP | 0.798 |
| Improved M-SVC | 0.979 | |
| MDS-KNN | 0.607 | |
| NB | 0.489 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, K.; Shi, L.; Deng, Z.; Fu, X.; Liu, Y. Indoor NLOS Positioning System Based on Enhanced CSI Feature with Intrusion Adaptability. Sensors 2020, 20, 1211. https://doi.org/10.3390/s20041211
Han K, Shi L, Deng Z, Fu X, Liu Y. Indoor NLOS Positioning System Based on Enhanced CSI Feature with Intrusion Adaptability. Sensors. 2020; 20(4):1211. https://doi.org/10.3390/s20041211
Chicago/Turabian StyleHan, Ke, Lingjie Shi, Zhongliang Deng, Xiao Fu, and Yun Liu. 2020. "Indoor NLOS Positioning System Based on Enhanced CSI Feature with Intrusion Adaptability" Sensors 20, no. 4: 1211. https://doi.org/10.3390/s20041211
APA StyleHan, K., Shi, L., Deng, Z., Fu, X., & Liu, Y. (2020). Indoor NLOS Positioning System Based on Enhanced CSI Feature with Intrusion Adaptability. Sensors, 20(4), 1211. https://doi.org/10.3390/s20041211