A DIY Low-Cost Wireless Wind Data Acquisition System Used to Study an Arid Coastal Foredune

 ,
,  ,
,  and
and
Abstract

1. Introduction
2. Related Work
3. Material and Methods
3.1. Wind Data Acquisition System
3.1.1. Design Principles
- Cost The funding available for developing the system was strictly limited. This was a requirement which affected all aspects of the design process. As our research interests were focused on strong or very strong wind conditions under which sand transportation occurs (more than 5 m/s), our field experiments did not require wind sensors of extreme sensitivity. However, a large number of sensors were needed, and we therefore decided to resort to a DIY approach and the use of low-cost electronics and instruments.
- Flexible parametrization system The final system should be flexible enough to parameterize the data structure, as for example the data sampling periods, log files, etc.
- Autonomy The system, and specifically each independent wireless sensor device, should have sufficient autonomy, in terms of energy consumption, to allow continuous on-field session measurements of at least 10 h.
- Temperature concerns The system needed to endure high temperatures during the day. A temperature control system for each wireless sensor device was therefore an important requirement during deployment, and especially when a complete on-field data acquisition session was being undertaken.
- Easy deployment and use Given the hard logistical conditions of the field where the system was to be used (especially due to the mobility of the substratum), the deployment of the data acquisition system needed to be as easy as possible. In addition, the system had to be user friendly given the multidisciplinary profiles of the people involved in the on-field measurement sessions.
- Wireless communications There are numerous advantages to the use of wireless communication links between the elements of the system as opposed to wired connections, especially in terms of transportation and on-field deployment. Given that the wind sensing devices basically only need to periodically transmit wind speed and direction data, which require only a few bytes, and some complementary information such as timestamps, high data rate communication was not a strict requirement. As the aim was for the wind sensing devices to have a high degree of autonomy, a further requirement was to choose a wireless technology which consumed as little power as possible.
- Reach The area to be covered in a typical data-acquisition task of this type is about 50 × 50 square meters. This was considered sufficient to study a whole foredune in the study area, as will be seen. Hence, the reach of the wireless communication system should at least cover these dimensions.
- Reliability The experiments would be carried out under demanding conditions of intense sand/dust transportation, high temperatures, and strong winds. The system therefore had to be able to alert the user in case any of the wind sensing stations stopped transmitting. In fact, this proved to be an extremely useful feature which ensured the quality of the data that was obtained. Moreover, it is important that the data acquired during an experimental session is observable on-site as it is collected, in addition to being saved in a secondary memory device for later analysis. The detection and on-site fixing of errors is an important advantage which is not possible in systems in which access to collected data are only possible once the experiment has concluded.
3.1.2. The Data Acquisition System
- Base station The base station is a personal computer or similar device running GNU/Linux and equipped with an XBee communication link, which is used for system synchronization and monitoring during a data acquisition session. Usually, we deploy the base station running on a GNU/Linux Raspberry Pi based embedded computer device exporting its graphical environment via VNC (Virtual Networking Computing) [48] on a mobile tablet device. In this case, the embedded computer acts as a WiFi access point for the tablet. In contrast to the use of a laptop, this facilitates the on-field use of the base station given the harsh conditions during a data acquisition session of intense sand and dust transportation combined with strong winds. In this manner, it is possible to protect the embedded computer from sand, dust, and wind by keeping it in a backpack, for instance, and the tablet by using a convenient weather-proof cover.
- Wireless wind sensing devices Each wireless wind sensing device is an independent, small Arduino-based embedded system for wind speed and direction data acquisition, which communicates periodically with the base station via XBee during a data acquisition session.
- a wind sensor for measuring wind speed and direction comprising a cup anemometer (weather station WS-2080 anemometer [58], accuracy: ±3.54 km/h, maximum measured speed: 180.25 km/h, resolution: 0.161 km/h) and a wind vane (based on a US Digital MA3 angular sensor [59])—a DIY design already used in robotic sailing navigation [60];
- an RC low pass filter to smooth out the cup anemometer signal;
- a buzzer to signal the wind vane calibration and homing processes when starting, or to indicate any device error condition;
- a temperature sensor;
- and a battery power supply system formed by a Lipo Rider Pro supply/charging board [61] and a 6000 mAh 3.7 v. battery pack, which provides a continuous autonomy of about 30 h.
- If a specific deployed wind sensor has been started but the base station has not received any registration packet from it. In this case, there is probably no good line of sight with the device, and so the solution is to move the base station or the device to another location.
- If a device sends data which does not change over time. This is a typical error and usually means that there is a connection problem with the anemometer or the wind vane. This is indicated on the interface by a virtual LED for each device (“D” status indicator in Figure 5).
- If the temperature is too high for a particular device. As this could result in device failure, the interface shows the temperature of each device, and a virtual LED (“T” status indicator in Figure 5) indicates the temperature level and turns red when is too high (greater than 70 C).
- If status packets have not been received from a specific device for a given time duration, the situation is indicated through a virtual LED (“S” status indicator in Figure 5). This circumstance might be temporary, but if it persists the device could be suffering from a communication problem or be unavailable for use due to other causes. Note that communication problems can cause some PPS packets, broadcasted from the base station, to be lost, resulting in a device’s internal clock accumulating too much drift if the problems persist for an excessive time. In this case, it is possible, through offline data processing, to re-synchronize the data acquired by the malfunctioning device, combining the data logs stored by all the devices deployed in the experimental session.
3.2. Experimental Validation of Wind Sensing Device Measurements
4. Results and Discussion
4.1. Study Area and Experimental Methodology
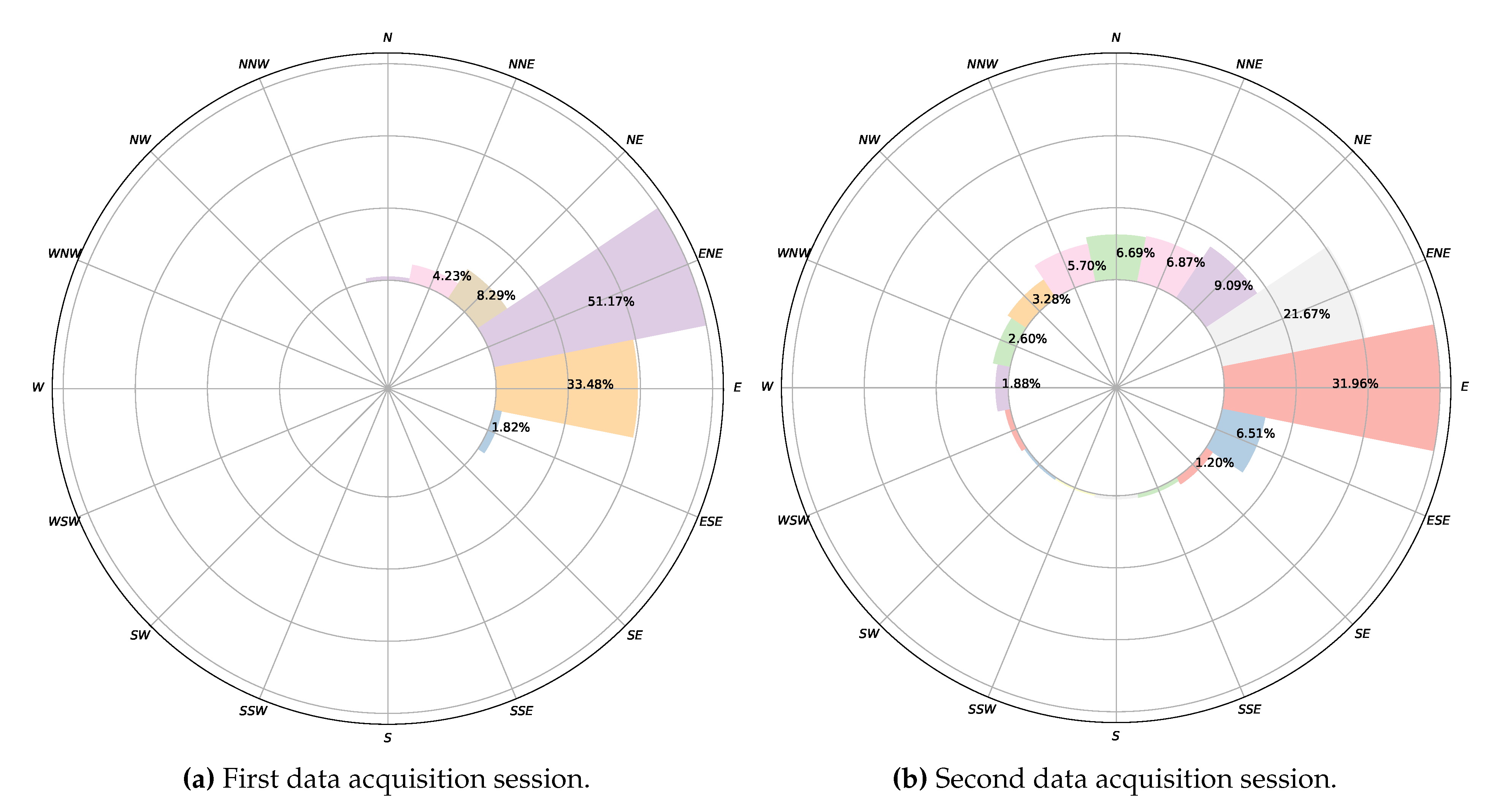
Data Acquisition Sessions
4.2. Wind Field Model
4.3. Experimental Results
- Cost Table 3 shows a summary of the approximate cost of each of the wind sensing devices which constitute the data acquisition system. Each item’s cost is approximate, as the value may differ slightly depending on the seller or provider. The total cost for a wind sensing device is well below the cost of a typical commercial 3D ultrasonic anemometer, sometimes by as much as one order of magnitude compared to research-grade wind sensors. In this case, eleven wind sensing devices were built and used for the experimental study. Evidently, high-priced ultrasonic anemometers are ideal for studies which require wind data acquisition at lesser spatial scales where wind turbulence plays a key role. However, this is not the case for the spatial scale of the experimental study we carried out. Consequently, the more cost-effective DIY approach considerably reduced the cost barrier of this experimental study. As to the costs of the base station, Table 3 also lists the cost of a base station comprised of a Raspberry Pi board and a mobile tablet device, which was the configuration used in both data acquisition sessions. Bearing in mind that a laptop running GNU/Linux can also act as a base station, as mentioned earlier in Section 3, in this case, the base station cost will amount to the cost of the laptop computer, the XBee Explorer USB interface and the XBee communication module.
- Flexible system parametrization The embedded software developed for the wind sensing devices, along with the control and monitoring software developed for the base station, allowed the configuration of a variety of parameters which can affect a data acquisition session. It is possible to adjust the data sampling periods in the wind sensing devices and the log files in both kinds of nodes, the base station and the data acquisition devices. As to the calibration and homing procedures of the wind vane, the time window can be adjusted as well as the beep patterns. Other additional aspects which can also be altered include, for example, the temperature interval to indicate overheating situations through the temperature status indicator on the control and monitoring interface, the interface timeout which indicates that a wind sensing device has communication problems, or the period of the base station’s PPS broadcast.
- Autonomy In relation to power autonomy, an experimentally determined autonomy of slightly more than 30 h of continuous operation was observed for each wind sensing device, which is well above the initial requirement of 10 h of power autonomy. Furthermore, as previously mentioned in Section 3, the current design permits, if required, the use of a solar panel to charge each wind sensing device’s battery pack. This would allow deployment of the devices for longer experimental sessions. Longer power autonomy is also feasible, if required, by taking advantage of some of the power-saving features present in Arduino UNO’s ATmega328P microcontroller, namely the use of its power-saving sleep modes, the possibility of deactivating some of the microcontroller’s on-chip peripherals when not used, and the option of dynamically changing its system clock [80].
- Temperature concerns The control and monitoring interface of the base station allowed the monitoring of each device in case excessive temperatures were reached and actions needed to be taken. The highest temperatures that were recorded during the data acquisition sessions that we carried out were well below 50 C, and so no intervention was required. It should be noted that, as a precautionary measure, the compartment containing the electronics of each wind sensing device, shown in Figure 3b, was protected in both experimental sessions with a white cloth cover, visible in Figure 12a,b, to mitigate any problem of overheating due to solar radiation.
- Easy deployment and use All the wind sensing devices were battery powered and communicated wirelessly, facilitating their deployment as no cabling was required. Equally, as they are light and small devices, their on-site transportation can be carried out by one person on most occasions. As to the initial calibration and homing procedures for each device when deployed, these are relatively simple and can be carried out by people without any special training, with the only requirement being to bring a compass for the homing procedure. No special training is required either to use the control and monitoring interface of the base station. The team that conducted the experiments found the data acquisition system equipment easy to use on-site, and no extra support was required.
- Wireless communications As mentioned above, the wireless communications system facilitated deployment as there was no need to deploy wired connections between the wind sensing devices during the on-site experimental sessions, which is usually logistically very cumbersome. In addition, as Figure 1 illustrates, the data acquisition system presents a star network topology, with the base station as the central node. In other words, the wind sensing devices do not communicate between themselves, but instead only on a P2P basis with the base station. This star network topology setting is valid for deployments in areas where all the wind sensing devices are within reach of the base station and can communicate individually with it. For studies in wider areas, covering larger areas, it is possible to configure the XBee PRO S1 802.15.4 modules, changing their firmware, with a communication protocol capable of dynamic rerouting and packet relaying which will allow deployment of the data acquisition system as a mesh topology, specifically using the protocol DigiMesh [81]. Using this configuration, as a mesh topology, deployment of the data acquisition system in more extensive areas is possible as the data can be routed to the base station from the furthest wind sensing devices thanks to packet retransmission between the XBee modules.
- Reach The star topology used during the experimental sessions was within reach of the XBee PRO S1 802.15.4 modules, which, according to their specifications [50], can extend to approximately 1.6 km in favourable conditions. This range is well above that required for the study area of approximately 50 × 50 square meters where the data acquisition sessions were performed. There were no communication problems between the base station and the wind sensing devices during the sessions. In fact, thanks to the reach of XBE PRO S1 802.15.4 modules, the data acquisition system has already been deployed to study bigger areas, specifically in an experimental study covering an area of 27.76 ha, the results of which have been published in [82]. Moreover, as mentioned in the previous paragraph, if required, the data acquisition system can be configured using a mesh network topology, which will enable experimental deployments with greater reach and hence the coverage of more extensive areas.
- Reliability During the data acquisition sessions which were carried out for this environmental study, the system was continuously monitored through the control and monitoring interface running in the base station. No faulty situation was detected during the sessions. For the length of the experimental sessions, the collected data were stored in both the base station’s secondary memory and in each wind sensing device’s micro-SD card. After the sessions had concluded, it was found that one of the wind sensing devices (device No. 10) was displaying incorrect behaviour in the course of the offline processing of the collected wind data in the second data acquisition session, and for this reason has been omitted in Figure 14. This erroneous behavior was not detected on-site. The hypothesis for the cause of this malfunction was a bad wire contact due to sand and humidity during the session.
4.4. Further Experimental Studies
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Nordstrom, K.F.; Lampe, R.; Vandemark, L.M. Reestablishing Naturally Functioning Dunes on Developed Coasts. Environ. Manag. 2000, 25, 37–51. [Google Scholar] [CrossRef] [PubMed]
- Jackson, N.L.; Nordstrom, K.F. Aeolian sediment transport and landforms in managed coastal systems: A review. Aeolian Res. 2011, 3, 181–196. [Google Scholar] [CrossRef]
- Paskoff, R. Côtes en danger. Practiques de la Géographie; Elsevier: Masson, Paris, Italy, 1993. [Google Scholar]
- Everard, M.; Jones, L.; Watts, B. Have we neglected the societal importance of sand dunes? An ecosystem services perspective. Aquat. Conserv. Mar. Freshwater Ecosyst. 2010, 20, 476–487. [Google Scholar] [CrossRef]
- Cressey, D. The DIY electronics transforming research. Nat. News 2017, 544, 125. [Google Scholar] [CrossRef] [PubMed]
- Arduino. Available online: https://www.arduino.cc (accessed on 16 September 2019).
- Kushner, D. The making of Arduino. IEEE Spectrum - Geek Life. Available online: https://spectrum.ieee.org/geek-life/hands-on/the-making-of-arduino (accessed on 22 September 2019).
- Raspberry, P. Available online: https://www.raspberrypi.org (accessed on 16 September 2019).
- CAN in Automation (CiA): Controller Area Network (CAN). Available online: https://www.can-cia.org (accessed on 18 September 2019).
- I2C-bus specification and user manual. NXP Semiconductors. Available online: https://www.nxp.com/docs/en/user-guide/UM10204.pdf (accessed on 18 September 2019).
- Serial Peripheral Interface. Available online: https://en.wikipedia.org/wiki/Serial_Peripheral_Interface (accessed on 18 September 2019).
- Bluetooth Tecnhology Website. Available online: https://www.bluetooth.com (accessed on 18 September 2019).
- WiFi. Available online: https://www.wi-fi.org (accessed on 18 September 2019).
- Digi XBee Ecosystem. Available online: https://www.digi.com/xbee (accessed on 18 September 2019).
- Licenses. GNU Project. Free Software Foundation. Available online: https://www.gnu.org/licenses/licenses.en.html (accessed on 27 January 2020).
- 1149.1-2013 - IEEE Standard for Test Access Port and Boundary-Scan Architecture. Available online: https://standards.ieee.org/standard/1149_1-2013.html (accessed on 28 January 2020).
- Sweeney, R.E.; Nguyen, V.; Alouidor, B.; Budiman, E.; Wong, R.K.; Yoon, J. Flow Rate and Raspberry Pi-Based Paper Microfluidic Blood Coagulation Assay Device. IEEE Sens. J. 2019, 19, 4743–4751. [Google Scholar] [CrossRef]
- Kim, M.; Suh, T. A Low-Cost Surveillance and Information System for Museum Using Visible Light Communication. IEEE Sens. J. 2019, 19, 1533–1541. [Google Scholar] [CrossRef]
- Leeuw, T.; Boss, E.S.; Wright, D.L. In situ Measurements of Phytoplankton Fluorescence Using Low Cost Electronics. Sensors 2013, 13, 7872–7883. [Google Scholar] [CrossRef]
- Beddows, P.A.; Mallon, E.K. Cave Pearl Data Logger: A Flexible Arduino-Based Logging Platform for Long-Term Monitoring in Harsh Environments. Sensors 2018, 18, 530. [Google Scholar] [CrossRef]
- Segura-Garcia, J.; Felici-Castell, S.; Perez-Solano, J.J.; Cobos, M.; Navarro, J.M. Low-Cost Alternatives for Urban Noise Nuisance Monitoring Using Wireless Sensor Networks. IEEE Sens. J. 2015, 15, 836–844. [Google Scholar] [CrossRef]
- Bardaji, R.; Sánchez, A.M.; Simon, C.; Wernand, M.R.; Piera, J. Estimating the Underwater Diffuse Attenuation Coefficient with a Low-Cost Instrument: The KdUINO DIY Buoy. Sensors 2016, 16, 373. [Google Scholar] [CrossRef]
- Lockridge, G.; Dzwonkowski, B.; Nelson, R.; Powers, S. Development of a Low-Cost Arduino-Based Sonde for Coastal Applications. Sensors 2016, 16, 528. [Google Scholar] [CrossRef] [PubMed]
- Pozzebon, A.; Cappelli, I.; Mecocci, A.; Bertoni, D.; Sarti, G.; Alquini, F. A Wireless Sensor Network for the Real-Time Remote Measurement of Aeolian Sand Transport on Sandy Beaches and Dunes. Sensors 2018, 18, 820. [Google Scholar] [CrossRef] [PubMed]
- Chan, K.; Schillereff, D.; Baas, A.; Chadwick, M.; Main, B.; Mulligan, M.; O’Shea, F.; Pearce, R.; Smith, T.E.L.; van Soesbergen, A.; et al. Low-cost electronic sensors for environmental research: pitfalls and opportunities. Available online: https://doi.org/10.31223/osf.io/t7xrn (accessed on 14 February 2020).
- Baker, B. Frontiers of Citizen Science: Explosive growth in low-cost technologies engage the public in research. BioScience 2016, 66, 921–927. [Google Scholar] [CrossRef]
- Busch, J.A.; Bardaji, R.; Ceccaroni, L.; Friedrichs, A.; Piera, J.; Simon, C.; Thijsse, P.; Wernand, M.; Van der Woerd, H.J.; Zielinski, O. Citizen Bio-Optical Observations from Coast- and Ocean and Their Compatibility with Ocean Colour Satellite Measurements. Remote Sens. 2016, 8, 879. [Google Scholar] [CrossRef]
- Rise of citizen scientist. Nature. Editorial (published 18th August 2015). Available online: https://doi.org/10.1038/524265a (accessed on 23 September 2019).
- Delgado-Fernandez, I.; Jackson, D.W.T.; Cooper, J.A.G.; Baas, A.C.W.; Beyers, J.H.M.; Lynch, K. Field characterization of three-dimensional lee-side airflow patterns under offshore winds at a beach-dune system. J. Geophys. Res. Earth Surf. 2013, 118, 706–721. [Google Scholar] [CrossRef]
- Jackson, D.W.T.; Beyers, J.H.M.; Lynch, K.; Cooper, J.A.G.; Baas, A.C.W.; Delgado-Fernandez I, I. Investigation of three-dimensional wind flow behaviour over coastal dune morphology under offshore winds using computational fluid dynamics (CFD) and ultrasonic anemometry. Earth Surf. Processes Landforms 2011, 36, 1113–1124. [Google Scholar] [CrossRef]
- Smyth, T.A.G.; Jackson, D.; Cooper, A. Airflow and aeolian sediment transport patterns within a coastal trough blowout during lateral wind conditions. Earth Surf. Processes Landforms 2014, 39, 1847–1854. [Google Scholar] [CrossRef]
- Weaver, C.M.; Wiggs, G.F. Field measurements of mean and turbulent airflow over a barchan sand dune. Geomorphology 2011, 128, 32–41. [Google Scholar] [CrossRef]
- Walker, I.J. Physical and logistical considerations of using ultrasonic anemometers in aeolian sediment transport research. Geomorphology 2005, 68, 57–76. [Google Scholar] [CrossRef]
- Bauer, B.O.; Hesp, P.A.; Walker, I.J.; Davidson-Arnott, R.G. Sediment transport (dis)continuity across a beach–dune profile during an offshore wind event. Geomorphology 2015, 245, 135–148. [Google Scholar] [CrossRef]
- Hesp, P.A.; Davidson-Arnott, R.; Walker, I.J.; Ollerhead, J. Flow dynamics over a foredune at Prince Edward Island, Canada. Geomorphology 2005, 65, 71–84. [Google Scholar] [CrossRef]
- Pye, K. Physical and human influences on coastal dune development between the Ribble and Mersey estuaries, northwest England. In Coastal Dunes: Form and Process; Nordstrom, K., Psuty, N., Carter, R., Eds.; John Wiley & Son Ltd.: Chichester, UK, 1990; pp. 339–359. [Google Scholar]
- Hesp, P.A. Ecological processes and plant adaptations on coastal dunes. J. Arid. Environ. 1991, 21, 165–191. [Google Scholar] [CrossRef]
- Hesp, P. Morphology, dynamics and internal stratification of some established foredunes in southeast Australia. Sediment. Geol. 1988, 55, 17–41. [Google Scholar] [CrossRef]
- McLachlan, A. Dissipative Beaches and Macrofauna Communities on Exposed Intertidal Sands. J. Coastal Res. 1990, 6, 57–71. [Google Scholar]
- García-Romero, L.; Hesp, P.A.; Peña-Alonso, C.; da Silva, G.M.; Hernández-Calvento, L. Climate as a control on foredune mode in Southern Australia. Sci. Total Environ. 2019, 694, 133768. [Google Scholar] [CrossRef]
- Ley, C.; Gallego, J.; Vidal, C. Manual de restauración de dunas costeras; Dirección General de Costas: Ministerio de Medio Ambiente, Spain, 2007. [Google Scholar]
- Hernández-Cordero, A.I.; Peña-Alonso, C.; Hernández-Calvento, L.; Ferrer-Valero, N.; Santana-Cordero, A.M.; García-Romero, L.; Espino, E.P.C. Aeolian Sedimentary Systems of the Canary Islands. In The Spanish Coastal Systems: Dynamic Processes, Sediments and Management; Morales, J.A., Ed.; Springer International Publishing: Cham, Switzerland, 2019; pp. 699–725. [Google Scholar] [CrossRef]
- Viera-Pérez, M.; Hernández-Calvento, L.; Hesp, P.A.; Santana-del Pino, A. Effects of artificial light on flowering of foredune vegetation. Ecology 2019, 100, e02678. [Google Scholar] [CrossRef]
- Viera-Pérez, M. Estudio detallado de la duna costera de Maspalomas (Gran Canaria, Islas Canarias): Interacción Traganum Moquini-Dinámica sedimentaría eólica en un entrono intervenido. Recomendaciones de cara a su gestión. Ph.D. Thesis, Universidad de Las Palmas de Gran Canaria, Las Palmas de Gran Canaria, Spain, 2015. Available online: http://hdl.handle.net/10553/17572 (accessed on 6 December 2019).
- Hernández, L.; Alonso, I.; Sánchez-Pérez, I.; Alcántara-Carrió, J.; Montesdeoca, I. Shortage of Sediments in the Maspalomas Dune Field (Gran Canaria, Canary Islands) Deduced from Analysis of Aerial Photographs, Foraminiferal Content, and Sediment Transport Trends. J. Coastal Res. 2007, 993–999. [Google Scholar] [CrossRef]
- Cabrera, L.; Hernández Cordero, A.; Viera, M.; Cruz, N.; Hernández-Calvento, L. Caracterización de una duna costera de zona árida: Maspalomas (Gran Canaria). Geo-Temas 2013, 14, 107–110. [Google Scholar]
- Hernández-Calvento, L.; Jackson, D.; Medina, R.; Hernández-Cordero, A.; Cruz, N.; Requejo, S. Downwind effects on an arid dunefield from an evolving urbanised area. Aeolian Res. 2014, 15, 301–309. [Google Scholar] [CrossRef]
- Richardson, T.; Stafford-Fraser, Q.; Wood, K.R.; Hopper, A. Virtual network computing. IEEE Internet Comput. 1998, 2, 33–38. [Google Scholar] [CrossRef]
- SparkFun XBee Explorer USB. Available online: https://www.sparkfun.com/products/11812 (accessed on 17 October 2019).
- Digi XBee 802.15.4. Available online: https://www.digi.com/products/embedded-systems/digi-xbee/rf-modules/2-4-ghz-modules/xbee-802-15-4 (accessed on 16 October 2019).
- Zeadally, S.; Siddiqui, F.; Baig, Z. 25 Years of Bluetooth Technology. Future Internet 2019, 11, 194. [Google Scholar] [CrossRef]
- Baker, N. ZigBee and Bluetooth strengths and weaknesses for industrial applications. Comput. Control Eng. J. 2005, 16, 20–25. [Google Scholar] [CrossRef]
- Casilari, E.; Cano-García, J.M.; Campos-Garrido, G. Modeling of Current Consumption in 802.15.4/ZigBee Sensor Motes. Sensors 2010, 10, 5443–5468. [Google Scholar] [CrossRef] [PubMed]
- The GTK+ Project. Available online: http://www.gtk.org (accessed on 27 January 2020).
- libxbee3. A C/C++ library to aid the use of Digi XBee radios in API mode. Available online: https://github.com/attie/libxbee3 (accessed on 27 January 2020).
- Arduino Uno Rev. 3. Available online: https://store.arduino.cc/arduino-uno-rev3 (accessed on 26 September 2019).
- Arduino Wireless SD Shield. Available online: https://store.arduino.cc/arduino-wireless-sd-shield (accessed on 26 September 2019).
- Ambient Weather WS-2080 Product Manual. Available online: https://p10.secure.hostingprod.com/@site.ambientweatherstore.com/ssl/Manuals/ws2080.pdf (accessed on 27 September 2019).
- US Digital MA3 Miniature Absolute Magnetic Shaft Encoder. Available online: https://www.usdigital.com/products/encoders/absolute/magnetic/MA3 (accessed on 26 September 2019).
- Cabrera-Gámez, J.; Ramos de Miguel, A.; Domínguez-Brito, A.C.; Hernández-Sosa, J.D.; Isern-González, J.; Fernández-Perdomo, E. An Embedded Low-Power Control System for Autonomous Sailboats; Robotic Sailing 2013; Bars, F.L., Jaulin, L., Eds.; Springer International Publishing: Cham, Switzerland, 2014; pp. 67–79. [Google Scholar] [CrossRef]
- Lipo Rider Pro. Seed Studio. Available online: https://www.seeedstudio.com/LiPo-Rider-Pro.html (accessed on 26 September 2019).
- Niu, X.; Yan, K.; Zhang, T.; Zhang, Q.; Zhang, H.; Liu, J. Quality evaluation of the pulse per second (PPS) signals from commercial GNSS receivers. GPS Solutions 2015, 19, 141–150. [Google Scholar] [CrossRef]
- Tirado-Andrés, F.; Araujo, A. Performance of clock sources and their influence on time synchronization in wireless sensor networks. Int. J. Distrib. Sens. Netw. 2019, 15, 1550147719879372. [Google Scholar] [CrossRef]
- xbee-arduino. Arduino library for communicating with XBee radios in API mode. Available online: https://github.com/andrewrapp/xbee-arduino (accessed on 27 January 2020).
- Ceramic Resonator CSTCE16M0V53-R0. Murata Manufacturing Co., Ltd. Available online: https://www.murata.com/en-eu/api/pdfdownloadapi?cate=&partno=CSTCE16M0V53-R0 (accessed on 21 January 2020).
- International Morse code Recommendation ITU-R M.1677-1. International Telecommunication Union. October 2009. Available online: http://www.itu.int/rec/R-REC-M.1677-1-200910-I (accessed on 16 October 2019).
- Anemometer. Wind Direction Transmitter Compact. Thies Clima. Available online: https://www.thiesclima.com/en/Products/Wind-Compact/?art=147 (accessed on 23 January 2020).
- Wind Vane. Wind Direction Transmitter Compact. Thies Clima. Available online: https://www.thiesclima.com/en/Products/Wind-Compact/?art=326 (accessed on 23 January 2020).
- Agencia Estatal de Meteorología. Gobierno de España. Available online: http://www.aemet.es (accessed on 23 January 2020).
- Hesp, P.; Walker, I. 11.17 Coastal Dunes. In Treatise on Geomorphology; Shroder, J.F., Ed.; Academic Press: San Diego, CA, USA, 2013; pp. 328–355. [Google Scholar] [CrossRef]
- Balcells, R.; Barrera, J.; Gómez, J.; Cueto, L. Mapa geológico E: 1:25 000; MAGNA: Aurora, ON, Canada, 1990. [Google Scholar]
- Hernández-Calvento, L. Diagnóstico sobre la evolución del sistema de dunas de Maspalomas (1960-2000); Cabildo de Gran Canaria: Las Palmas de Gran Canaria, Spain, 2006.
- Pérez-Chacón, E.; Hernández Calvento, L.; Hernández Cordero, A.; Máyer, P.; Romero Martín, L.; Alonso, I.; Mangas, J.; Menéndez, I.; Sánchez Pérez, I.; Ojeda, J.; et al. Maspalomas: claves científicas para el análisis de su problemática ambiental; Universidad de Las Palmas de Gran: Canaria, Spain, 2007. [Google Scholar]
- Alonso, I.; Sánchez Pérez, I.; Rodríguez, S.; Pejenaute, I.; Hernández Cordero, A.; Menéndez, I.; Hernández-Calvento, L.; Pérez-Chacón, E.; Cabrera, L. Aeolian dynamic changes due to the obstacle generated by Traganum moquinii. In Proceedings of the International Conference on Management and Restoration of Coastal Dunes (ICCD 2007), Santander, Spain, 3–5 October 2007. [Google Scholar]
- Hernández-Cordero, A.; Pérez-Chacón, E.; Hernández-Calvento, L. La investigacióncomo soporte de la gestión: el ejemplo de la duna costera (foredune) de Maspalomas (Gran Canaria,Islas Canarias). Societat d’Història Natural de les Balears 2012, 19, 289–306. Available online: https://accedacris.ulpgc.es/handle/10553/58606 (accessed on 6 February 2020).
- Leica FlexLine TS06 Total Station. Available online: https://w3.leica-geosystems.com/downloads123/zz/tps/FlexLine%20TS06/brochures-datasheet/FlexLine_TS06_Datasheet_en.pdf (accessed on 17 October 2019).
- Montero, G.; Rodríguez, E.; Montenegro, R.; Escobar, J.; González-Yuste, J. Genetic algorithms for an improved parameter estimation with local refinement of tetrahedral meshes in a wind model. Adv. Eng. Software 2005, 36, 3–10. [Google Scholar] [CrossRef][Green Version]
- Montenegro, R.; Cascón, J.; Escobar, J.; Rodríguez, E.; Montero, G. An automatic strategy for adaptive tetrahedral mesh generation. Appl. Numer. Math. 2009, 59, 2203–2217. [Google Scholar] [CrossRef][Green Version]
- Cascón, J.M.; Rodríguez, E.; Escobar, J.M.; Montenegro, R. Comparison of the meccano method with standard mesh generation techniques. Eng. Comput. 2015, 31, 161–174. [Google Scholar] [CrossRef]
- ATmega48A/PA/88A/PA/168A/PA/328/P. megaAVR Data Sheet. Rev. A-10/2018. DS40002061A. Microchip Technology Inc. Available online: http://ww1.microchip.com/downloads/en/DeviceDoc/ATmega48A-PA-88A-PA-168A-PA-328-P-DS-DS40002061A.pdf (accessed on 18 October 2019).
- XBee/XBee-PRO DigiMesh 2.4. Available online: https://www.digi.com/resources/documentation/digidocs/pdfs/90000991.pdf (accessed on 19 October 2019).
- García-Romero, L.; Delgado-Fernández, I.; Hesp, P.A.; Hernández-Calvento, L.; Viera-Pérez, M.; Hernández-Cordero, A.I.; Cabrera-Gámez, J.; Domínguez-Brito, A.C. Airflow dynamics, vegetation and aeolian erosive processes in a shadow zone leeward of a resort in an arid transgressive dune system. Aeolian Res. 2019, 38, 48–59. [Google Scholar] [CrossRef]
- García-Romero, L.; Hernández-Cordero, A.I.; Hernández-Calvento, L.; Espino, E.P.C.; López-Valcarcel, B.G. Procedure to automate the classification and mapping of the vegetation density in arid aeolian sedimentary systems. Prog. Phys. Geog.: Earth Environ. 2018, 42, 330–351. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wind Data Error Comparison | Regression Analysis Coeficient | Mean Bias Error (MBE) | Root Mean Square Error (RMSE) |
|---|---|---|---|
| Speed | 0.950862 | −0.167 m/s | 0.468 m/s |
| Direction angle | 0.871838 | 1.107 | 3.557 |
| First Data Acquisition Session | Second Data Acquisition Session | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Node | X (UTM) | Y (UTM) | Elevation (m) | Level above Ground (m) | Node | X (UTM) | Y (UTM) | Elevation (m) | Level above Ground (m) |
| 1 | 443871.613 | 3069222.632 | 4.45 | 0.50 | 1 | 443860.808 | 3069217.213 | 3.26 | 0.40 |
| 2 | 443865.393 | 3069220.715 | 4.86 | 0.50 | 2 | 443865.377 | 3069220.706 | 4.81 | 0.45 |
| 3 | 443868.921 | 3069225.821 | 5.83 | 1.90 | 3 | 443862.589 | 3069226.298 | 3.97 | 1.56 |
| 4 | 443881.383 | 3069224.574 | 3.47 | 0.50 | 4 | 443881.386 | 3069224.595 | 3.47 | 0.50 |
| 5 | 443860.019 | 3069220.822 | 3.17 | 0.50 | 5 | 443859.917 | 3069220.810 | 3.17 | 0.50 |
| 6 | 443868.921 | 3069225.821 | 4.43 | 0.50 | 6 | 443862.589 | 3069226.298 | 2.78 | 0.37 |
| 7 | 443866.896 | 3069215.118 | 5.67 | 0.50 | 7 | 443866.874 | 3069215.133 | 5.67 | 0.50 |
| 8 | 443865.393 | 3069220.715 | 6.26 | 1.90 | 8 | 443860.808 | 3069217.213 | 4.75 | 1.90 |
| 9 | 443901.172 | 3069228.772 | 3.05 | 0.58 | 9 | 443901.172 | 3069228.772 | 3.05 | 0.58 |
| 10 | 443901.172 | 3069228.772 | 4.37 | 1.90 | 10 | 443868.054 | 3069227.449 | 4.14 | 0.50 |
| 11 | 443866.896 | 3069215.118 | 7.07 | 1.90 | 11 | 443864.411 | 3069213.071 | 4.27 | 0.41 |
| Wireless Wind Sensing Device | Base Station | ||
|---|---|---|---|
| Arduino UNO rev. 3 -controller | ≈ 23.00 € | Raspberry Pi 3 B+ | ≈ 38.00 € |
| Wireless SD shield | ≈ 23.00 € | XBee Explore USB | ≈ 22.00 € |
| XBee PRO S1 802.15.4 60 mW | ≈ 33.00 € | XBee PRO S1 802.15.4 60 mW | ≈ 33.00 € |
| LiPo Rider Pro | ≈ 13.50 € | Mobile Tablet 10" | ≈ 250.00 € |
| LiPo 3-battery Pack 6000 mAh /3.7v | ≈ 38.00 € | Total | ≈ 343.00 € |
| TMP36 temperature sensor | ≈ 2.00 € | ||
| Buzzer/Beeper | ≈ 4.00 € | ||
| US Digital MA3 based wind vane | ≈ 50.00 € | ||
| Total | ≈ 186.50 € | ||
| System Features | Wind Sensing Device Features | ||
|---|---|---|---|
| Wireless technology | XBee 802.15.4/DigiMesh | Embedded system | Arduino UNO rev. 3 based |
| System components | a base station and multiple wireless wind sensing devices | On board sensors | anemometer, wind vane and temperature sensor |
| Data store | locally in sensing devices’ micro-SD cards and globally in base station’s secondary memory | Anemometer error estimation | 0.468 m/s |
| Data time synchronization | based on base station’s clock or GPS based. | Wind vane error estimation | 3.557 |
| Range | in star topology: area of maximum radius of 1.6 km. in mesh topology: potentially unlimited areas using DigiMesh’s rerouting and packet relaying. | Autonomy | with fully charged batteries: about 30 h solar-powered: potentially unlimited |
| Costs | wind sensing device: approx. 186.50 € per unit base station: approx. 343.00 € | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Domínguez-Brito, A.C.; Cabrera-Gámez, J.; Viera-Pérez, M.; Rodríguez-Barrera, E.; Hernández-Calvento, L. A DIY Low-Cost Wireless Wind Data Acquisition System Used to Study an Arid Coastal Foredune. Sensors 2020, 20, 1064. https://doi.org/10.3390/s20041064
Domínguez-Brito AC, Cabrera-Gámez J, Viera-Pérez M, Rodríguez-Barrera E, Hernández-Calvento L. A DIY Low-Cost Wireless Wind Data Acquisition System Used to Study an Arid Coastal Foredune. Sensors. 2020; 20(4):1064. https://doi.org/10.3390/s20041064
Chicago/Turabian StyleDomínguez-Brito, Antonio C., Jorge Cabrera-Gámez, Manuel Viera-Pérez, Eduardo Rodríguez-Barrera, and Luis Hernández-Calvento. 2020. "A DIY Low-Cost Wireless Wind Data Acquisition System Used to Study an Arid Coastal Foredune" Sensors 20, no. 4: 1064. https://doi.org/10.3390/s20041064
APA StyleDomínguez-Brito, A. C., Cabrera-Gámez, J., Viera-Pérez, M., Rodríguez-Barrera, E., & Hernández-Calvento, L. (2020). A DIY Low-Cost Wireless Wind Data Acquisition System Used to Study an Arid Coastal Foredune. Sensors, 20(4), 1064. https://doi.org/10.3390/s20041064