Real-Time Compliant Stream Processing Agents for Physical Rehabilitation



Abstract
1. Introduction
- The inclusion of strict real-time compliance in RDF stream processing systems,
- The combination of autonomous real-time agents and semantic stream processing, and
- The application of real-time stream processing agents in digital physiotherapy scenarios.
- The definition of a model for real-time compliant stream processing agents, constrained by strict deadlines for interactions and negotiation among participating agents.
- The study and implementation of agent-based stream processing entities, based on the RDF stream processing paradigm.
- The simulation and analysis of both real-time and general-purpose MAS, considering different scenarios for digital rehabilitation using motion sensors.
2. Digital Rehabilitation
2.1. Wearable-Based Rehabilitation Systems
2.2. Real-Time Feedback and Agents in Digital Rehabilitation
2.3. Semantic Data Stream Processing
3. Autonomous Real-Time Streaming Agents for Digital Rehabilitation
- Autonomous sensor interactions. Beyond traditional IoT deployments configured following top-down paradigms; digital rehabilitation often requires autonomy on the configuration of the devices, as well as their synchronization and negotiation over data and services.
- Real-time guarantees in sensor processing. Given the necessity of complying with deadlines and strict constraints on data execution, negotiation and delivery, autonomous sensors must incorporate scheduling mechanisms to ensure these real-time guarantees.
- Standard and extensible messaging and metadata. Sensing devices should be able to exchange data, in different formats and representations, potentially using Web standards for representing metadata. Possible information to be specified are time constraints, performatives, conditions, and negotiation protocols.
- Asynchronous and distributed communication. Sensors should be able to send and receive messages, as well as coordinating among them without the need of a central entity that governs their interaction flow.
- Semantic stream data management. Semantic representations should be employed to allow sensors to understand and act according to a given stream of data. These representations should align with Web standards (e.g., OWL, RDF), and allow extensibility and high expressiveness.
4. Real-Time Stream Processing Agents Model
4.1. RSP Data Model
| Listing 1. CQELS continous query over a stream of heartbeat observations. |
 |
4.2. Stream Processing Agent Model
| Listing 2. RDF stream elements containing heartbeat observations in JSON-LD. This example shows how stream elements can be represented as time-annotated graphs and containing RDF triples that represent the stream contents (e.g., sensor observations). |
 |
4.3. Negotiation among RSP Agents
| Listing 3. FIPA call for proposal message represented in JSON-LD. This example shows an excerpt of a message emitted by an agent soliciting a service or task to which other agents may bid for. The message itself is repreented in RDF and is exchanged through the RSP agent interfaces. |
 |
5. An Agent-Based Architecture for Decentralized RDF Stream Processing
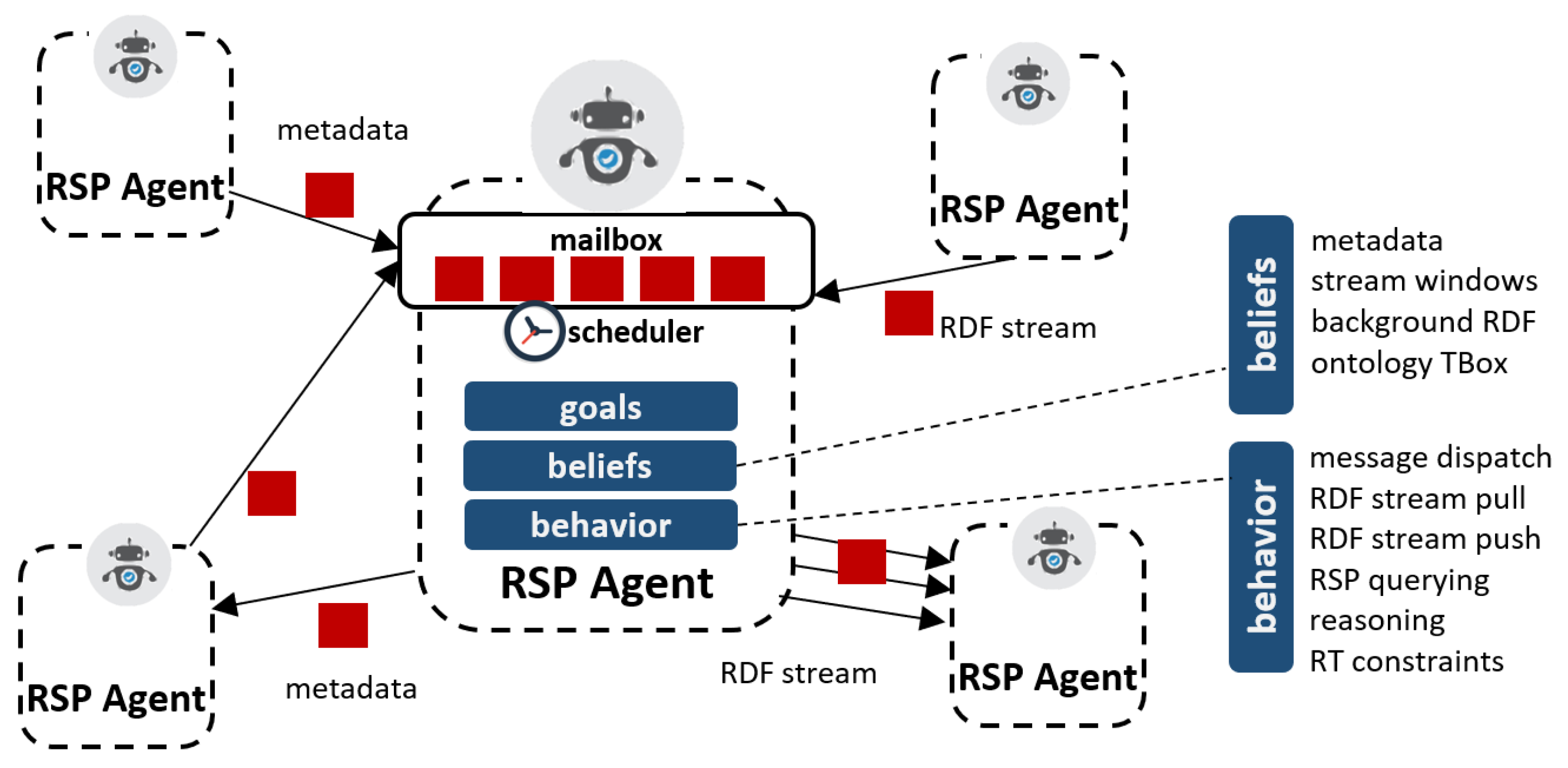
- RDF stream elements: these are RDF triples or graphs from a given RDF stream, as defined in Section 4. The stream delivery of these messages, either pulled or pushed, can be applied in different scenarios (e.g., feeding a stream, delivering query answers, and pushing reasoning entailments).
- RDF stream metadata: these are essentially metadata messages required to perform tasks such as retrieving a stream description, declaring and RDF stream, filter a set of stream endpoints, and declaring a query.
5.1. Messages and Notifications in RSP Agents
5.2. Stream Receivers, Senders and Consumers
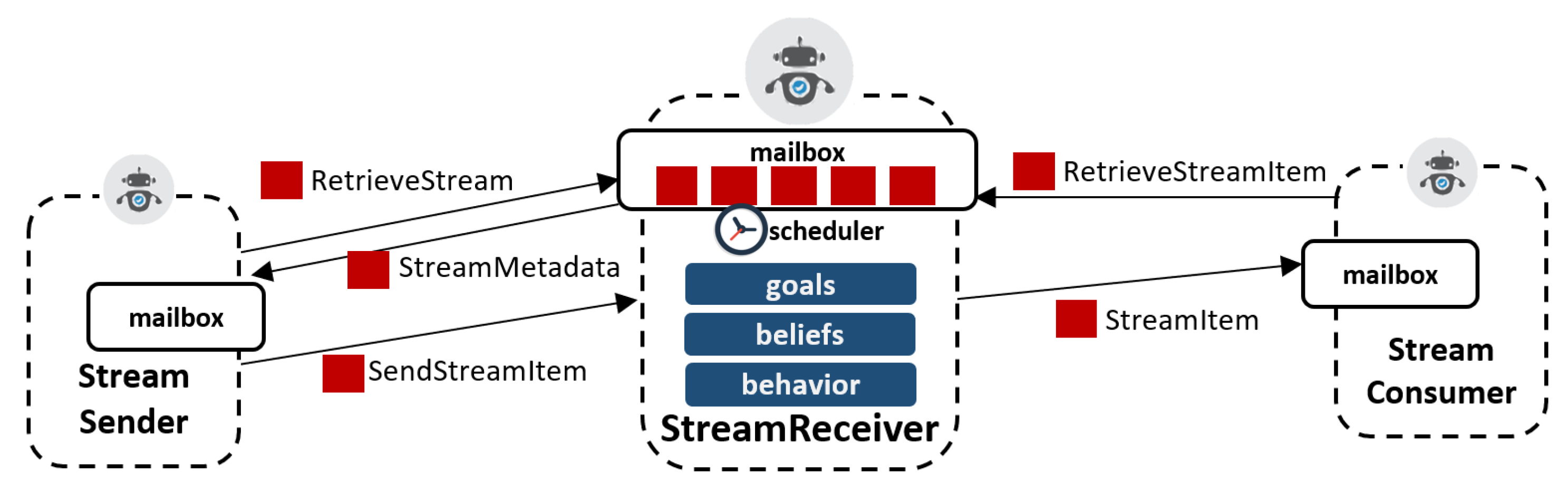
5.2.1. Stream Receiver
- RetrieveAllStreams: to request metadata of all RDF streams registered in the receiver agent.
- CreateStream: to request the declaration of an RDF stream. This message includes the metadata of the RDF stream to be created.
- RetrieveStream: to request for the metadata of a given RDF stream in the receiver agent. Its IRI identifies the requested stream.
- SendStreamItem: to add a stream element to an existing RDF stream residing in the requested receiver agent. This message includes the stream element itself, as well as the RDF stream IRI.
- RetrieveStreamItem: to request for a specific stream element. The message includes the IRI of the RDF stream and the element itself. As in-stream systems and element might be volatile, in the sense that it might not be de-referenceable after some time, this message also includes views over stream elements (e.g., based on time recency).
- PushStreamItems: to request for stream items to be pushed back. The message includes the RDF stream IRI.
- CreateQuery: to request for a continuous query to be registered. The query includes the reference to the stream IRIs to be used and the IRI of the resulting stream of responses.
| Algorithm 1 Stream Receiver: receive function. |
|
- Input streams: these streams are essentially meant only to receive new items, but are not intended to be consumed by other agents other than the one that hosts it. Examples of such streams are those used as input for RSP queries: other RSP agents can feed these streams, but the query processor on the Stream Receiver is the only one that consumes it.
- Output streams: these are those RDF streams that are meant to be consumed by other RSP agents, but fed only by the agent that hosts it. An example of such a stream is the continuous result of an RSP query engine.
5.2.2. Stream Sender
- postStream: send RDF stream metadata to declare it on a Stream Receiver. The sender emits a CreateStream message through this operation.
- postStreamItem: send and RDF stream element to an (input) stream on a given Stream Receiver. This is typically a feed-stream message.
- postQuery: register a query on a Stream Receiver with a CreateQuery message.
5.2.3. Stream Consumer
- getStreamItem: requests to consume an RDF stream item. Implementations of this operation can derive different strategies for retrieving RDF stream contents. Given the dynamicity of streams, it is usually unfeasible to collect them one by one through their identifiers. Alternatively, these implementations may instead rely on stream views that may capture, for example, the latest stream items in a given window of time, or the ones complying to some filtering criteria.
- pushStreamItems: requests stream items to be pushed to the consumer. Conversely to the previous operation, which is essentially poll-based, this one requests the receiver to act as a sender as soon as there is an RDF stream element available for consumption.
6. Stream Processing Agents Simulation
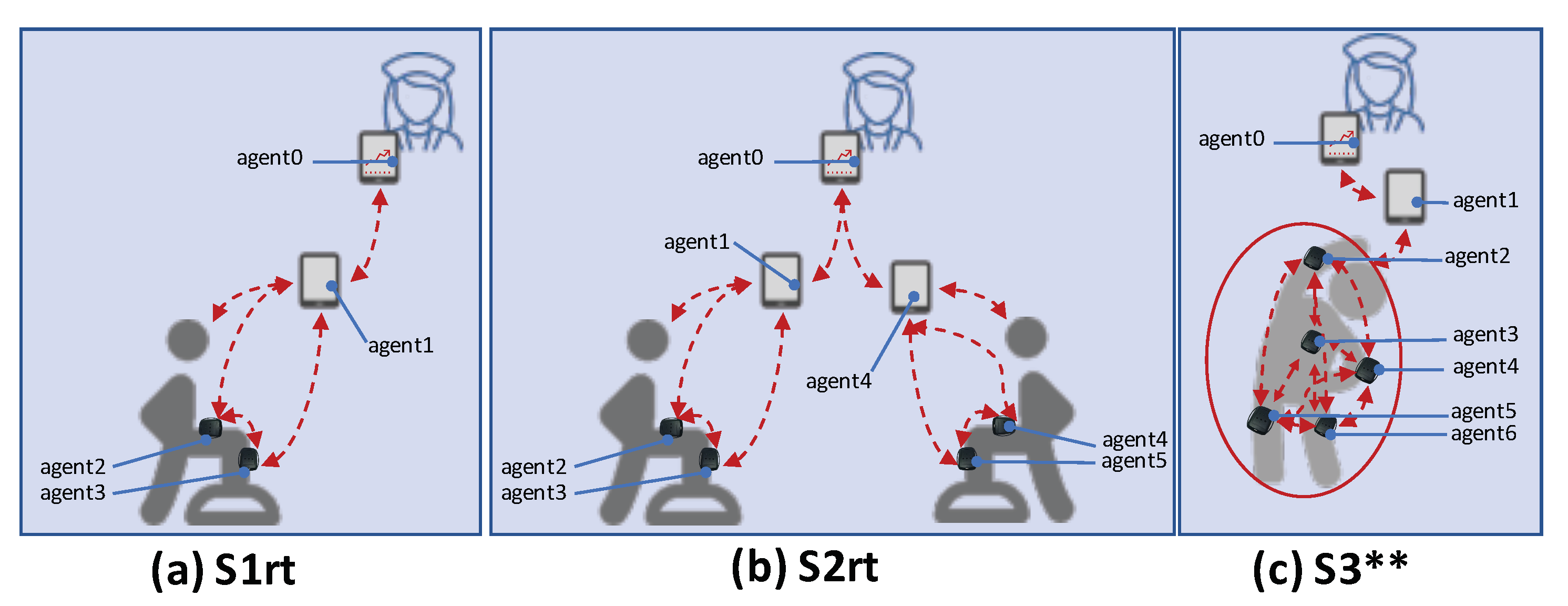
6.1. Simulated Scenarios and Setups
- S1:
- One physiotherapist, one patient, two sensors;
- S2:
- One physiotherapist, two patient, two sensors;
- S3:
- One physiotherapist, one patient, five sensors.
6.1.1. Scenario S1
6.1.2. Scenario S2
6.1.3. Scenario S3rt
6.1.4. Scenario S3gp
7. Implementation and Experimentation with RSP Agents
8. Discussion and Conclusions
- Stream reasoning agents model. Beyond existing approaches in stream reasoning or RDF stream processing (as seen in Section 2), the proposed model does not only focus on complex processing algorithms and methods over semantic streams, but also on the autonomous cooperation among agents that produce and consume those streams, following the vision described in [9].
- Real-time compliance for RSP agents. Existing RSP systems provide execution models that do not support mechanisms for compliance with strict real-time constraints. Filling this gap, our proposed model incorporates these constraints at its core, which can be implemented using existing strategies as in [12].
- Real-time agent simulation results for digital rehabilitation. The simulation environment presented in the paper constitutes an important milestone for modeling and configuring agent-based systems for different scenarios, considering strict real-time specifications. While previous works on digital rehabilitation feedback were typically provided on best-effort strategies, these simulations provide an indication of how and when real-time scheduling strategies can be helpful in order to deal with strict timing limitations.
- Implementation and evaluation of RSP agents. The feasibility and behavior of the RSP agents concept has been demonstrated in this work, through a concrete implementation that relies on an existing RSP engine. This is a first implementation of the agent model for RDF stream processing, beyond the centralized systems present in the literature, as seen in Section 2.
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Acree, L.S.; Longfors, J.; Fjeldstad, A.S.; Fjeldstad, C.; Schank, B.; Nickel, K.J.; Montgomery, P.S.; Gardner, A.W. Physical activity is related to quality of life in older adults. Health Qual. Life Outcomes 2006, 4, 37. [Google Scholar] [CrossRef] [PubMed]
- Elavsky, S.; McAuley, E.; Motl, R.W.; Konopack, J.F.; Marquez, D.X.; Hu, L.; Jerome, G.J.; Diener, E. Physical activity enhances long-term quality of life in older adults: Efficacy, esteem, and affective influences. Ann. Behav. Med. 2005, 30, 138–145. [Google Scholar] [CrossRef] [PubMed]
- Faber, M.J.; Bosscher, R.J.; Paw, M.J.C.A.; van Wieringen, P.C. Effects of exercise programs on falls and mobility in frail and pre-frail older adults: A multicenter randomized controlled trial. Arch. Phys. Med. Rehabil. 2006, 87, 885–896. [Google Scholar] [CrossRef]
- Daley, M.J.; Spinks, W.L. Exercise, mobility and aging. Sports Med. 2000, 29, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Vissers, M.M.; Bussmann, J.B.; Verhaar, J.A.; Arends, L.R.; Furlan, A.D.; Reijman, M. Recovery of physical functioning after total hip arthroplasty: Systematic review and meta-analysis of the literature. Phys. Ther. 2011, 91, 615–629. [Google Scholar] [CrossRef]
- Speck, R.M.; Courneya, K.S.; Mâsse, L.C.; Duval, S.; Schmitz, K.H. An update of controlled physical activity trials in cancer survivors: a systematic review and meta-analysis. J. Cancer Surviv. 2010, 4, 87–100. [Google Scholar] [CrossRef]
- Hugues, A.; Di Marco, J.; Janiaud, P.; Xue, Y.; Pires, J.; Khademi, H.; Cucherat, M.; Bonan, I.; Gueyffier, F.; Rode, G. Efficiency of physical therapy on postural imbalance after stroke: study protocol for a systematic review and meta-analysis. BMJ Open 2017, 7, e013348. [Google Scholar] [CrossRef]
- Reisdorf, B.C.; Rikard, R. Digital rehabilitation: A model of reentry into the digital age. Am. Behav. Sci. 2018, 62, 1273–1290. [Google Scholar] [CrossRef]
- Tommasini, R.; Calvaresi, D.; Calbimonte, J.P. Stream Reasoning Agents: Blue Sky Ideas Track. In Proceedings of the 18th International Conference on Autonomous Agents and MultiAgent Systems, Montreal, QC, Canada, 13–17 May 2019; pp. 1664–1680. [Google Scholar]
- Della Valle, E.; Ceri, S.; Barbieri, D.F.; Braga, D.; Campi, A. A first step towards stream reasoning. In Future Internet—FIS 2008; Springer: Berlin/Heidelberg, Germany, 2008; pp. 72–81. [Google Scholar]
- Dell’Aglio, D.; Le Phuoc, D.; Le-Tuan, A.; Ali, M.I.; Calbimonte, J.P. On a Web of Data Streams. Proceedings of ISWC Workshop on Decentralizing the Semantic Web DeSemWeb 2017, Vienna, Austria, 21–25 October 2017. [Google Scholar]
- Calvaresi, D.; Marinoni, M.; Dragoni, A.F.; Hilfiker, R.; Schumacher, M. Real-time multi-agent systems for telerehabilitation scenarios. Artif. Intell. Med. 2019, 96, 217–231. [Google Scholar] [CrossRef]
- Calvaresi, D.; Marinoni, M.; Sturm, A.; Schumacher, M.; Buttazzo, G. The challenge of real-time multi-agent systems for enabling IoT and CPS. In Proceedings of the International Conference on Web Intelligence (WI ’17), Leipzig, Germany, 23–27 August 2017; ACM: New York, NY, USA, 2017; pp. 356–364. [Google Scholar]
- Mikołajewska, E.; Mikołajewski, D. Neurological telerehabilitation–current and potential future applications. J. Health Sci. 2011, 1, 7–14. [Google Scholar]
- Borel, S.; Schneider, P.; Newman, C. Video analysis software increases the interrater reliability of video gait assessments in children with cerebral palsy. Gait Posture 2011, 33, 727–729. [Google Scholar] [CrossRef] [PubMed]
- Munro, A.; Herrington, L.; Carolan, M. Reliability of 2-dimensional video assessment of frontal-plane dynamic knee valgus during common athletic screening tasks. J. Sport Rehabil. 2012, 21, 7–11. [Google Scholar] [CrossRef] [PubMed]
- Buonocunto, P.; Giantomassi, A.; Marinoni, M.; Calvaresi, D.; Buttazzo, G. A limb tracking platform for tele-rehabilitation. ACM Trans. Cyber Phys. Syst. 2018, 2, 30. [Google Scholar] [CrossRef]
- Matarić, M.J.; Eriksson, J.; Feil-Seifer, D.J.; Winstein, C.J. Socially assistive robotics for post-stroke rehabilitation. J. NeuroEng. Rehabil. 2007, 4, 5. [Google Scholar] [CrossRef] [PubMed]
- Burgar, C.G.; Lum, P.S.; Shor, P.C.; Van der Loos, H.M. Development of robots for rehabilitation therapy: The Palo Alto VA/Stanford experience. J. Rehabil. Res. Dev. 2000, 37, 663–674. [Google Scholar]
- Zhang, W.; Gao, J.; Shi, B.; Cui, H.; Zhu, H. Health monitoring of rehabilitated concrete bridges using distributed optical fiber sensing. Comput.-Aided Civ. Infrastruct. Eng. 2006, 21, 411–424. [Google Scholar] [CrossRef]
- Ferreira, C.; Guimarães, V.; Santos, A.; Sousa, I. Gamification of stroke rehabilitation exercises using a smartphone. In Proceedings of the 8th International Conference on Pervasive Computing Technologies for Healthcare (PervasiveHealth ’14); ICST (Institute for Computer Sciences, Social-Informatics and Telecommunications Engineering): Brussels, Belgium, 2014; pp. 282–285. [Google Scholar]
- Alimanova, M.; Borambayeva, S.; Kozhamzharova, D.; Kurmangaiyeva, N.; Ospanova, D.; Tyulepberdinova, G.; Gaziz, G.; Kassenkhan, A. Gamification of hand rehabilitation process using virtual reality tools: Using leap motion for hand rehabilitation. In Proceedings of the 2017 First IEEE International Conference on Robotic Computing (IRC), Taichung, Taiwan, 10–12 April 2017; pp. 336–339. [Google Scholar]
- Fraile, J.A.; Bajo, J.; Corchado, J.M.; Abraham, A. Applying wearable solutions in dependent environments. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 1459–1467. [Google Scholar] [CrossRef]
- Bergmann, J.; McGregor, A. Body-worn sensor design: what do patients and clinicians want? Ann. Biomed. Eng. 2011, 39, 2299–2312. [Google Scholar] [CrossRef]
- Chen, K.H.; Chen, P.C.; Liu, K.C.; Chan, C.T. Wearable sensor-based rehabilitation exercise assessment for knee osteoarthritis. Sensors 2015, 15, 4193–4211. [Google Scholar] [CrossRef]
- Lee, S.I.; Adans-Dester, C.P.; Grimaldi, M.; Dowling, A.V.; Horak, P.C.; Black-Schaffer, R.M.; Bonato, P.; Gwin, J.T. Enabling stroke rehabilitation in home and community settings: A wearable sensor-based approach for upper-limb motor training. IEEE J. Transl. Eng. Health Med. 2018, 6, 1–11. [Google Scholar] [CrossRef]
- Sherrill, D.M.; Moy, M.L.; Reilly, J.J.; Bonato, P. Using hierarchical clustering methods to classify motor activities of COPD patients from wearable sensor data. J. NeuroEng. Rehabil. 2005, 2, 16. [Google Scholar] [CrossRef]
- Rodriguez, A.C.; Roda, C.; González, P.; Navarro, E. Contextualizing Tasks in Tele-Rehabilitation Systems for Older People. In International Workshop on Ambient Assisted Living; Springer: Cham, Switzerland, 2015; pp. 29–41. [Google Scholar]
- Felisberto, F.; Costa, N.; Fdez-Riverola, F.; Pereira, A. Unobstructive Body Area Networks (BAN) for efficient movement monitoring. Sensors 2012, 12, 12473–12488. [Google Scholar] [CrossRef] [PubMed]
- Mutingi, M.; Mbohwa, C. Developing Multi-agent Systems for mHealth Drug Delivery. In Mobile Health; Springer: Cham, Switzerland, 2015; pp. 671–683. [Google Scholar]
- Barbieri, D.F.; Braga, D.; Ceri, S.; Della Valle, E.; Grossniklaus, M. C-sparql: A continuous query language for rdf data streams. Int. J. Semant. Comput. 2010, 4, 3–25. [Google Scholar] [CrossRef]
- Calbimonte, J.P.; Jeung, H.; Corcho, O.; Aberer, K. Enabling query technologies for the semantic sensor web. Int. J. Semant. Web Inf. Syst. 2012, 8, 43–63. [Google Scholar] [CrossRef]
- Le-Phuoc, D.; Dao-Tran, M.; Parreira, J.X.; Hauswirth, M. A native and adaptive approach for unified processing of linked streams and linked data. In ISWC; Springer: Berlin/Heidelberg, Germany, 2011; pp. 370–388. [Google Scholar]
- Komazec, S.; Cerri, D.; Fensel, D. Sparkwave: continuous schema-enhanced pattern matching over RDF data streams. In Proceedings of the 4th ACM International Conference on Distributed Event-Based Systems DEBS, Berlin, Germany, 16–20 July 2012; ACM: New York, NY, USA, 2012; pp. 58–68. [Google Scholar]
- Anicic, D.; Fodor, P.; Rudolph, S.; Stojanovic, N. EP-SPARQL: A unified language for event processing and stream reasoning. In Proceedings of the WWW 2011, Hyderabad, India, 28 March–1 April 2011; pp. 635–644. [Google Scholar]
- Barbieri, D.F.; Della Valle, E. A Proposal for Publishing Data Streams as Linked Data—A Position Paper. In Proceedings of the LDOW 2010, Raleigh, NC, USA, 27 April 2010. [Google Scholar]
- Sequeda, J.F.; Corcho, O. Linked stream data: A position paper. In Proceedings of the SSN 2009, Las Vegas, NV, USA, 29 July 2009; pp. 148–157. [Google Scholar]
- Balduini, M.; Valle, E.D.; Tommasini, R. SLD Revolution: A Cheaper, Faster yet more Accurate Streaming Linked Data Framework. In Proceedings of the RSP 2017, Seoul, South Korea, 19–20 October 2017; pp. 1–15. [Google Scholar]
- Mauri, A.; Calbimonte, J.P.; Dell’Aglio, D.; Balduini, M.; Brambilla, M.; Valle, E.D.; Aberer, K. TripleWave: Spreading RDF Streams on the Web. In Proceedings of the ISWC 2016, Kobe, Hyogo, Japan, 17–21 October 2016; pp. 140–149. [Google Scholar]
- Berners-Lee, T.; Hendler, J.; Lassila, O. The semantic web. Sci. Am. 2001, 284, 34–43. [Google Scholar] [CrossRef]
- Ciortea, A.; Mayer, S.; Gandon, F.; Boissier, O.; Ricci, A.; Zimmermann, A. A Decade in Hindsight: The Missing Bridge Between Multi-Agent Systems and the World Wide Web. In Proceedings of the 18th International Conference on Autonomous Agents and MultiAgent Systems, Montreal, QC, Canada, 13–17 May 2019; pp. 1659–1663. [Google Scholar]
- Vetrice, G.; Deaconescu, T. Actuating systems of elbow rehabilitation devices. Ann. Acad. Roman. Sci. Ser. Eng. Sci. 2016, 8. [Google Scholar]
- Calvaresi, D.; Cesarini, D.; Sernani, P.; Marinoni, M.; Dragoni, A.F.; Sturm, A. Exploring the ambient assisted living domain: A systematic review. J. Ambient Intell. Hum. Comput. 2017, 8, 239–257. [Google Scholar] [CrossRef]
- Dell’Aglio, D.; Della Valle, E.; Calbimonte, J.P.; Corcho, O. RSP-QL semantics: A unifying query model to explain heterogeneity of RDF stream processing systems. Int. J. Semant. Web Inf. Syst. 2014, 10, 17–44. [Google Scholar] [CrossRef]
- Keskisärkkä, R.; Blomqvist, E.; Lind, L.; Hartig, O. RSP-QL*: Enabling Statement-Level Annotations in RDF Streams. In International Conference on Semantic Systems; Springer: Cham, Switzerland, 2019; pp. 140–155. [Google Scholar]
- Buttazzo, G.C. Hard Real-Time Computing Systems: Predictable Scheduling Algorithms and Applications; Springer Science & Business Media: New York, NY, USA, 2011. [Google Scholar]
- Greenwood, D.; Lyell, M.; Mallya, A.; Suguri, H. The IEEE FIPA approach to integrating software agents and web services. In Proceedings of the 6th International Joint Conference on Autonomous Agents and Multiagent Systems, Honolulu, HI, USA, 14–18 May 2007; ACM: New York, NY, USA, 2007; p. 276. [Google Scholar]
- Stonebraker, M.; Çetintemel, U.; Zdonik, S.B. The 8 requirements of real-time stream processing. SIGMOD Rec. 2005, 34, 42–47. [Google Scholar] [CrossRef]
- Calvaresi, D.; Marinoni, M.; Lustrissimini, L.; Appoggetti, K.; Sernani, P.; Dragoni, A.F.; Schumacher, M.; Buttazzo, G. Local scheduling in multi-agent systems: Getting ready for safety-critical scenarios. In Multi-Agent Systems and Agreement Technologies; Springer: Cham, Switzerland, 2017; pp. 96–111. [Google Scholar]
- Tommasini, R.; Sedira, Y.A.; Dell’Aglio, D.; Balduini, M.; Ali, M.I.; Le Phuoc, D.; Della Valle, E.; Calbimonte, J.P. VoCaLS: Vocabulary and Catalog of Linked Streams. In International Semantic Web Conference; Springer: Cham, Switzerland, 2018; pp. 256–272. [Google Scholar]
- Albanese, G.; Calvaresi, D.; Sernani, P.; Dubosson, F.; Dragoni, A.F.; Schumacher, M. MAXIM-GPRT: A Simulator of Local Schedulers, Negotiations, and Communication for Multi-Agent Systems in General-Purpose and Real-Time Scenarios. In International Conference on Practical Applications of Agents and Multi-Agent Systems; Springer: Cham, Switzerland, 2018; pp. 291–295. [Google Scholar]
- Pardo-Castellote, G.; Hamilton, M.; Thiebaut, S.S. Real-Time Publish-Subscribe System. U.S. Patent 7,882,253, 1 February 2011. [Google Scholar]
- Bellavista, P.; Corradi, A.; Foschini, L.; Pernafini, A. Data Distribution Service (DDS): A performance comparison of OpenSplice and RTI implementations. In Proceedings of the 2013 IEEE Symposium on Computers and Communications (ISCC), Split, Croatia, 7–10 July 2013; pp. 000377–000383. [Google Scholar]
- Calvaresi, D.; Appoggetti, K.; Lustrissimini, L.; Marinoni, M.; Sernani, P.; Dragoni, A.F.; Schumacher, M. Multi-Agent Systems’ Negotiation Protocols for Cyber-Physical Systems: Results from a Systematic Literature Review. In Proceedings of the 10th International Conference on Agents and Artificial Intelligence (ICAART 2018), Madeira, Portugal, 16–18 January 2018; pp. 224–235. [Google Scholar] [CrossRef]
- Smith, R.G. The contract net protocol: High-level communication and control in a distributed problem solver. IEEE Trans. Comput. 1980, 1104–1113. [Google Scholar] [CrossRef]
- Zhang, Y.; Duc, P.M.; Corcho, O.; Calbimonte, J.P. SRBench: A streaming RDF/SPARQL benchmark. In The Semantic Web–ISWC 2012; Springer: Berlin/Heidelberg, Germany, 2012; pp. 641–657. [Google Scholar]
- Patni, H.; Henson, C.; Sheth, A. Linked sensor data. In Proceedings of the 2010 International Symposium on Collaborative Technologies and Systems, Chicago, IL, USA, 17–21 May 2010; pp. 362–370. [Google Scholar]
- Della Valle, E.; Ceri, S.; Van Harmelen, F.; Fensel, D. It’s a streaming world! Reasoning upon rapidly changing information. IEEE Intell. Syst. 2009, 83–89. [Google Scholar] [CrossRef]
- Xiao, F. EFMCDM: Evidential fuzzy multicriteria decision making based on belief entropy. IEEE Trans. Fuzzy Syst. 2019. [Google Scholar] [CrossRef]
- Xiao, F.; Zhang, Z.; Abawajy, J. Workflow scheduling in distributed systems under fuzzy environment. J. Intell. Fuzzy Syst. 2019, 37, 5323–5333. [Google Scholar] [CrossRef]
- Xiao, F. A new divergence measure for belief functions in D–S evidence theory for multisensor data fusion. Inf. Sci. 2020, 514, 462–483. [Google Scholar] [CrossRef]
- Knublauch, H.; Kontokostas, D. Shapes constraint language (SHACL). W3C Recomm. 2017, 20. [Google Scholar]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | N. of Agents | Comm. Delay (milliseconds) | Sim. Time (seconds) | DF Scheduler | DF Server | Agent Local Scheduler | Agent Server | Negotiation Protocol | Contractor Heuristic | Award Heuristic |
|---|---|---|---|---|---|---|---|---|---|---|
| S1 | 4 | 10∼50 | 200 | EDF | CBS | EDF | CBS | RBN | ALL | BEST |
| S2 | 7 | 10∼50 | 200 | EDF | CBS | EDF | CBS | RBN | ALL | BEST |
| S3rt | 7 | 10∼50 | 200 | EDF | CBS | EDF | CBS | RBN | ALL | BEST |
| S3gp | 7 | 10∼50 | 200 | FIFO | - | FIFO | - | CNET | ALL | BEST |
| Task | Behavior |
|---|---|
| Kernel task | |
| read message | |
| write message | |
| compute inertial information | |
| compute inertial information | |
| display graphical information | |
| synchronization task | |
| on-board data elaboration | |
| MIDI signal reproduction |
| Server ID | Agent | Budget | Period | Type | Task(s) Served |
|---|---|---|---|---|---|
| S100 | all | 1 | 10 | CBS | |
| S200 | all | 1 | 10 | CBS |
| Agent ID | Task ID | Ex | Dm | C | R | T | D | n | f.R | l.R | S | Pub | Act |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 3 | 0 | 20 | 20 | −1 | - | - | - | ✗ | ✓ |
| 1 | 0 | 0 | 1 | - | - | - | - | - | - | S100 | ✗ | ✓ | |
| 2 | 0 | 0 | 1 | - | - | - | - | - | - | S200 | ✗ | ✓ | |
| 1 | 0 | 1 | 1 | 3 | 0 | 20 | 20 | - | - | - | - | ✗ | ✓ |
| 1 | 1 | 1 | 1 | - | - | - | - | - | - | S100 | ✗ | ✓ | |
| 2 | 1 | 1 | 1 | - | - | - | - | - | - | S200 | ✗ | ✓ | |
| 5 | 1 | - | 4 | - | 20 | 20 | - | - | - | - | ✓ | ✗ | |
| 2 | 0 | 2 | 2 | 2 | 0 | 15 | 15 | - | - | - | - | ✗ | ✓ |
| 1 | 2 | 2 | 1 | - | - | - | - | - | - | S100 | ✗ | ✓ | |
| 2 | 2 | 2 | 1 | - | - | - | - | - | - | S200 | ✗ | ✓ | |
| 3 | 2 | - | 4 | - | 20 | 20 | - | - | - | - | ✓ | ✗ | |
| 3 | 0 | 3 | 3 | 2 | 0 | 15 | 15 | - | - | - | - | ✗ | ✓ |
| 1 | 3 | 3 | 1 | - | - | - | - | - | - | S100 | ✗ | ✓ | |
| 2 | 3 | 3 | 1 | - | - | - | - | - | - | S200 | ✗ | ✓ | |
| 4 | 3 | - | 4 | - | 20 | 20 | - | - | - | - | ✓ | ✗ |
| Agent ID | Need ID | R | W | TR | TD | n | MinT | MaxT | Task(s) |
|---|---|---|---|---|---|---|---|---|---|
| 0 | 0 | 4 | 10 | 70 | 200 | - | 20 | 25 | 5 |
| 1 | 0 | 5 | 10 | 60 | 200 | - | 20 | 20 | 3 |
| 1 | 5 | 10 | 60 | 200 | - | 20 | 20 | 4 |
| Agent ID | Task ID | Ex | Dm | C | R | T | D | n | f.R | l.R | S | Pub | Act |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 0 | 0 | 3 | 0 | 20 | 20 | −1 | - | - | - | ✗ | ✓ | |
| 1 | 0 | 0 | 1 | - | - | - | - | - | - | S100 | ✗ | ✓ | |
| 2 | 0 | 0 | 1 | - | - | - | - | - | - | S200 | ✗ | ✓ | |
| 1 | 0 | 1 | 1 | 3 | 0 | 20 | 20 | - | - | - | - | ✗ | ✓ |
| 1 | 1 | 1 | 1 | - | - | - | - | - | - | S100 | ✗ | ✓ | |
| 2 | 1 | 1 | 1 | - | - | - | - | - | - | S200 | ✗ | ✓ | |
| 5 | 1 | - | 4 | - | 20 | 20 | - | - | - | - | ✓ | ✗ | |
| 2 | 0 | 2 | 2 | 2 | 0 | 15 | 15 | - | - | - | - | ✗ | ✓ |
| 1 | 2 | 2 | 1 | - | - | - | - | - | - | S100 | ✗ | ✓ | |
| 2 | 2 | 2 | 1 | - | - | - | - | - | - | S200 | ✗ | ✓ | |
| 3 | 2 | - | 4 | - | 20 | 20 | - | - | - | - | ✓ | ✗ | |
| 3 | 0 | 3 | 3 | 2 | 0 | 15 | 15 | - | - | - | - | ✗ | ✓ |
| 1 | 3 | 3 | 1 | - | - | - | - | - | - | S100 | ✗ | ✓ | |
| 2 | 3 | 3 | 1 | - | - | - | - | - | - | S200 | ✗ | ✓ | |
| 4 | 3 | - | 4 | - | 20 | 20 | - | - | - | - | ✓ | ✗ | |
| 4 | 0 | 4 | 4 | 3 | 0 | 20 | 20 | - | - | - | - | ✗ | ✓ |
| 1 | 4 | 4 | 1 | - | - | - | - | - | - | S100 | ✗ | ✓ | |
| 2 | 4 | 4 | 1 | - | - | - | - | - | - | S200 | ✗ | ✓ | |
| 6 | 4 | - | 4 | - | 20 | 20 | - | - | - | - | ✓ | ✗ | |
| 5 | 0 | 5 | 5 | 2 | 0 | 15 | 15 | - | - | - | - | ✗ | ✓ |
| 1 | 5 | 5 | 1 | - | - | - | - | - | - | S100 | ✗ | ✓ | |
| 2 | 5 | 5 | 1 | - | - | - | - | - | - | S200 | ✗ | ✓ | |
| 7 | 5 | - | 4 | - | 20 | 20 | - | - | - | - | ✓ | ✗ | |
| 6 | 0 | 6 | 6 | 2 | 0 | 15 | 15 | - | - | - | - | ✗ | ✓ |
| 1 | 6 | 6 | 1 | - | - | - | - | - | - | S100 | ✗ | ✓ | |
| 2 | 6 | 6 | 1 | - | - | - | - | - | - | S200 | ✗ | ✓ | |
| 8 | 6 | - | 4 | - | 20 | 20 | - | - | - | - | ✓ | ✗ |
| Agent ID | Need ID | R | W | TR | TD | n | MinT | MaxT | Task(s) |
|---|---|---|---|---|---|---|---|---|---|
| 0 | 0 | 4 | 10 | 70 | 200 | - | 20 | 25 | 5 |
| 1 | 4 | 10 | 70 | 200 | - | 20 | 25 | 6 | |
| 1 | 0 | 5 | 10 | 60 | 200 | - | 20 | 20 | 3 |
| 1 | 5 | 10 | 60 | 200 | - | 20 | 20 | 4 | |
| 4 | 0 | 5 | 10 | 60 | 200 | - | 20 | 25 | 7 |
| 1 | 5 | 10 | 60 | 200 | - | 20 | 25 | 8 |
| Agent ID | Task ID | Ex | Dm | C | R | T | D | n | f.R | l.R | S | Pub | Act |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 3 | 0 | 20 | 20 | −1 | - | - | - | ✗ | ✓ |
| 1 | 0 | 0 | 1 | - | - | - | - | - | - | S100 | ✗ | ✓ | |
| 2 | 0 | 0 | 1 | - | - | - | - | - | - | S200 | ✗ | ✓ | |
| 1 | 0 | 1 | 1 | 3 | 0 | 20 | 20 | - | - | - | - | ✗ | ✓ |
| 1 | 1 | 1 | 1 | - | - | - | - | - | - | S100 | ✗ | ✓ | |
| 2 | 1 | 1 | 1 | - | - | - | - | - | - | S200 | ✗ | ✓ | |
| 5 | 1 | - | 4 | - | 20 | 20 | - | - | - | - | ✓ | ✗ | |
| 2 | 0 | 2 | 2 | 2 | 0 | 15 | 15 | - | - | - | - | ✗ | ✓ |
| 1 | 2 | 2 | 1 | - | - | - | - | - | - | S100 | ✗ | ✓ | |
| 2 | 2 | 2 | 1 | - | - | - | - | - | - | S200 | ✗ | ✓ | |
| 3 | 2 | - | 4 | - | 20 | 20 | - | - | - | - | ✓ | ✗ | |
| 3 | 0 | 3 | 3 | 2 | 0 | 15 | 15 | - | - | - | - | ✗ | ✓ |
| 1 | 3 | 3 | 1 | - | - | - | - | - | - | S100 | ✗ | ✓ | |
| 2 | 3 | 3 | 1 | - | - | - | - | - | - | S200 | ✗ | ✓ | |
| 4 | 3 | - | 4 | - | 20 | 20 | - | - | - | - | ✓ | ✗ | |
| 8 | 3 | - | 11 | - | 16 | 16 | - | - | - | - | ✓ | ✗ | |
| 4 | 0 | 4 | 4 | 6 | 0 | 11 | 11 | - | - | - | - | ✗ | ✓ |
| 1 | 4 | 4 | 1 | - | - | - | - | - | - | S100 | ✗ | ✓ | |
| 2 | 4 | 4 | 1 | - | - | - | - | - | - | S200 | ✗ | ✓ | |
| 7 | 4 | - | 15 | - | 16 | 16 | - | - | - | - | ✓ | ✗ | |
| 5 | 0 | 5 | 5 | 3 | 0 | 15 | 15 | - | - | - | - | ✗ | ✓ |
| 1 | 5 | 5 | 1 | - | - | - | - | - | - | S100 | ✗ | ✓ | |
| 2 | 5 | 5 | 1 | - | - | - | - | - | - | S200 | ✗ | ✓ | |
| 3 | 5 | - | 6 | - | 23 | 23 | - | - | - | - | ✓ | ✗ | |
| 6 | 0 | 6 | 6 | 4 | 0 | 15 | 15 | - | - | - | - | ✗ | ✓ |
| 1 | 6 | 6 | 1 | - | - | - | - | - | - | S100 | ✗ | ✓ | |
| 2 | 6 | 6 | 1 | - | - | - | - | - | - | S200 | ✗ | ✓ | |
| 6 | 6 | - | 9 | - | 20 | 20 | - | - | - | - | ✓ | ✗ |
| Agent ID | Need ID | R | W | TR | TD | n | MinT | MaxT | Task(s) |
|---|---|---|---|---|---|---|---|---|---|
| 0 | 0 | 4 | 10 | 70 | 200 | - | 20 | 25 | 5 |
| 1 | 0 | 5 | 35 | 60 | 200 | - | 20 | 20 | 3 |
| 1 | 5 | 35 | 60 | 200 | - | 20 | 25 | 4 | |
| 3 | 0 | 6 | 10 | 60 | 200 | - | 20 | 20 | 3 |
| 1 | 10 | 10 | 80 | 200 | - | 20 | 20 | 6 | |
| 4 | 0 | 15 | 10 | 80 | 200 | - | 20 | 25 | 6 |
| 5 | 0 | 25 | 10 | 100 | 200 | - | 16 | 16 | 8 |
| 6 | 0 | 35 | 10 | 90 | 200 | - | 20 | 20 | 7 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Calvaresi, D.; Calbimonte, J.-P. Real-Time Compliant Stream Processing Agents for Physical Rehabilitation. Sensors 2020, 20, 746. https://doi.org/10.3390/s20030746
Calvaresi D, Calbimonte J-P. Real-Time Compliant Stream Processing Agents for Physical Rehabilitation. Sensors. 2020; 20(3):746. https://doi.org/10.3390/s20030746
Chicago/Turabian StyleCalvaresi, Davide, and Jean-Paul Calbimonte. 2020. "Real-Time Compliant Stream Processing Agents for Physical Rehabilitation" Sensors 20, no. 3: 746. https://doi.org/10.3390/s20030746
APA StyleCalvaresi, D., & Calbimonte, J.-P. (2020). Real-Time Compliant Stream Processing Agents for Physical Rehabilitation. Sensors, 20(3), 746. https://doi.org/10.3390/s20030746