Analysis of Vibration and Acoustic Signals for Noncontact Measurement of Engine Rotation Speed




Abstract
1. Introduction
2. Method
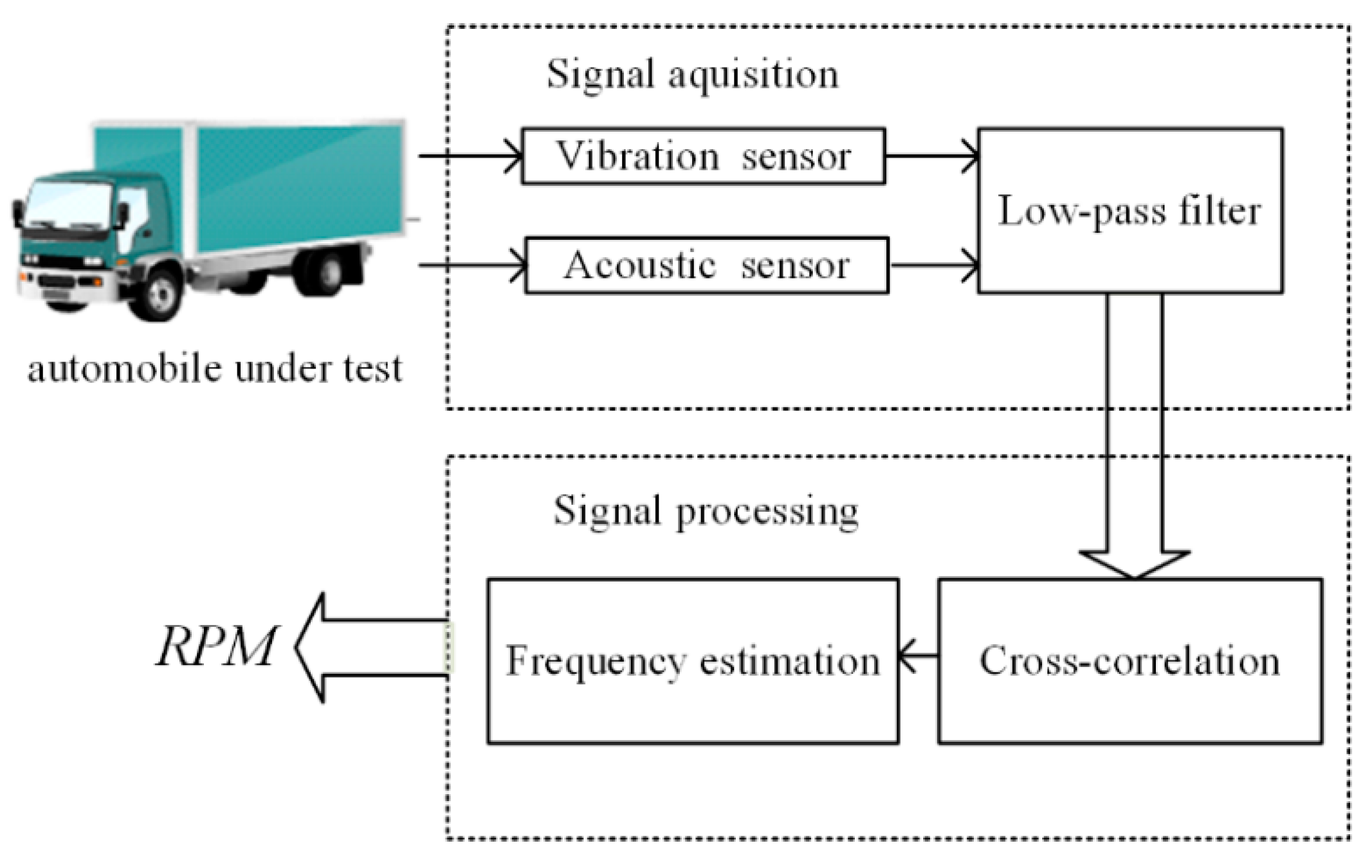
2.1. Measurement Principle
2.2. Cross-Correlation of Vibration and Acoustic Signals
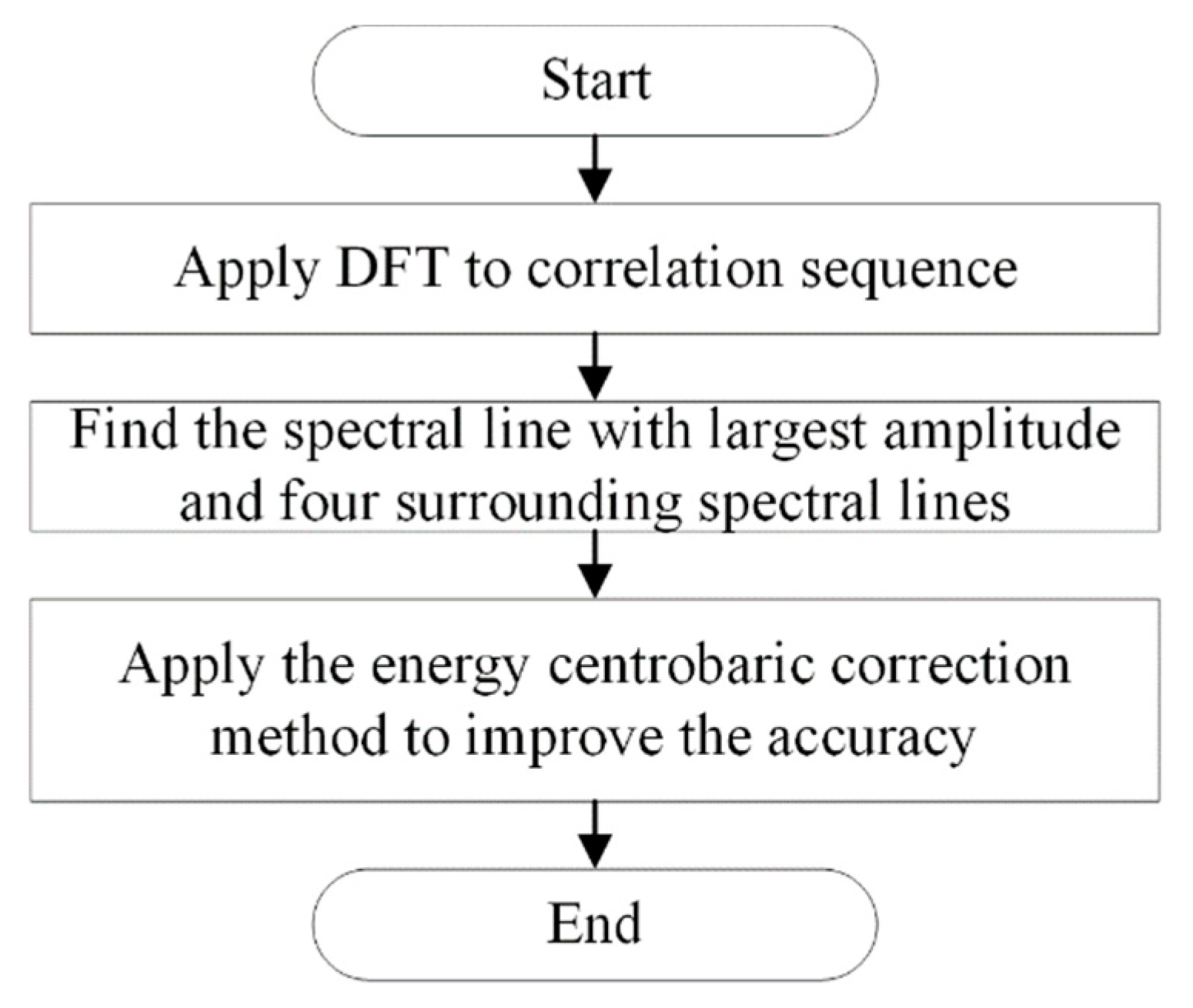
2.3. Estimation of Fundamental Frequency
3. Hardware Design and Test Results
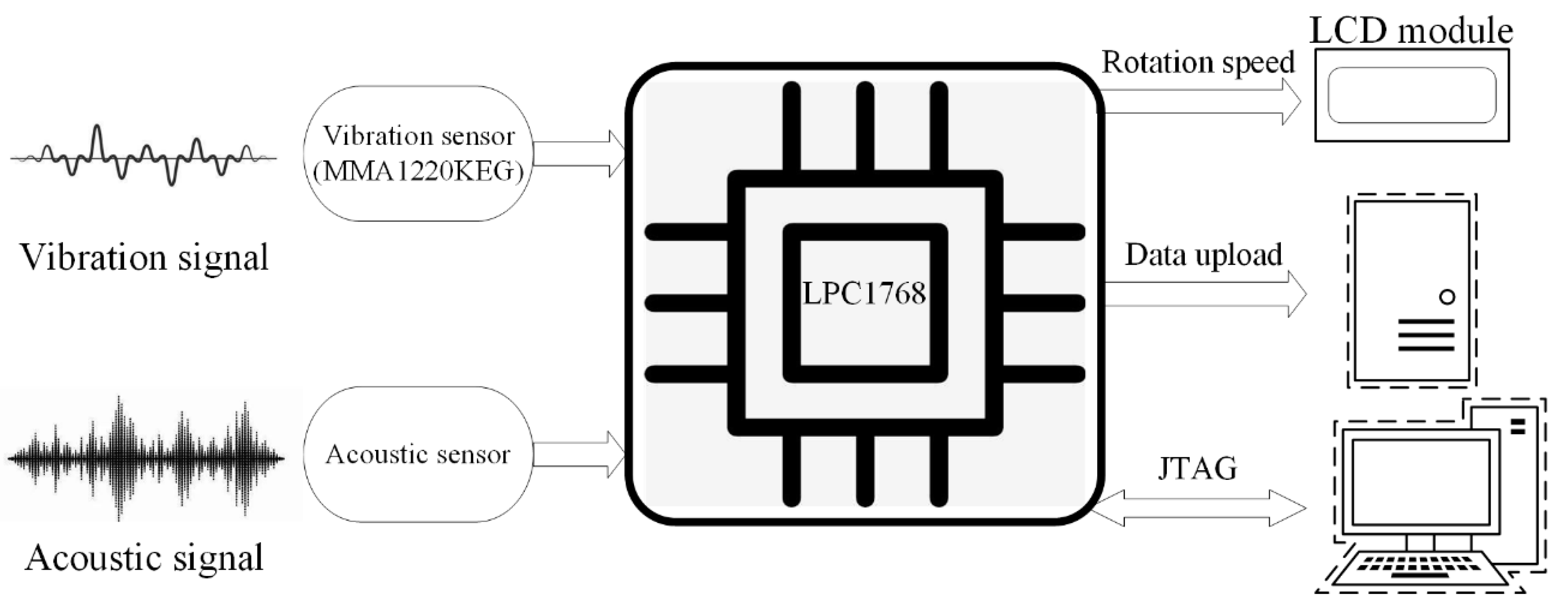
3.1. Hardware Design
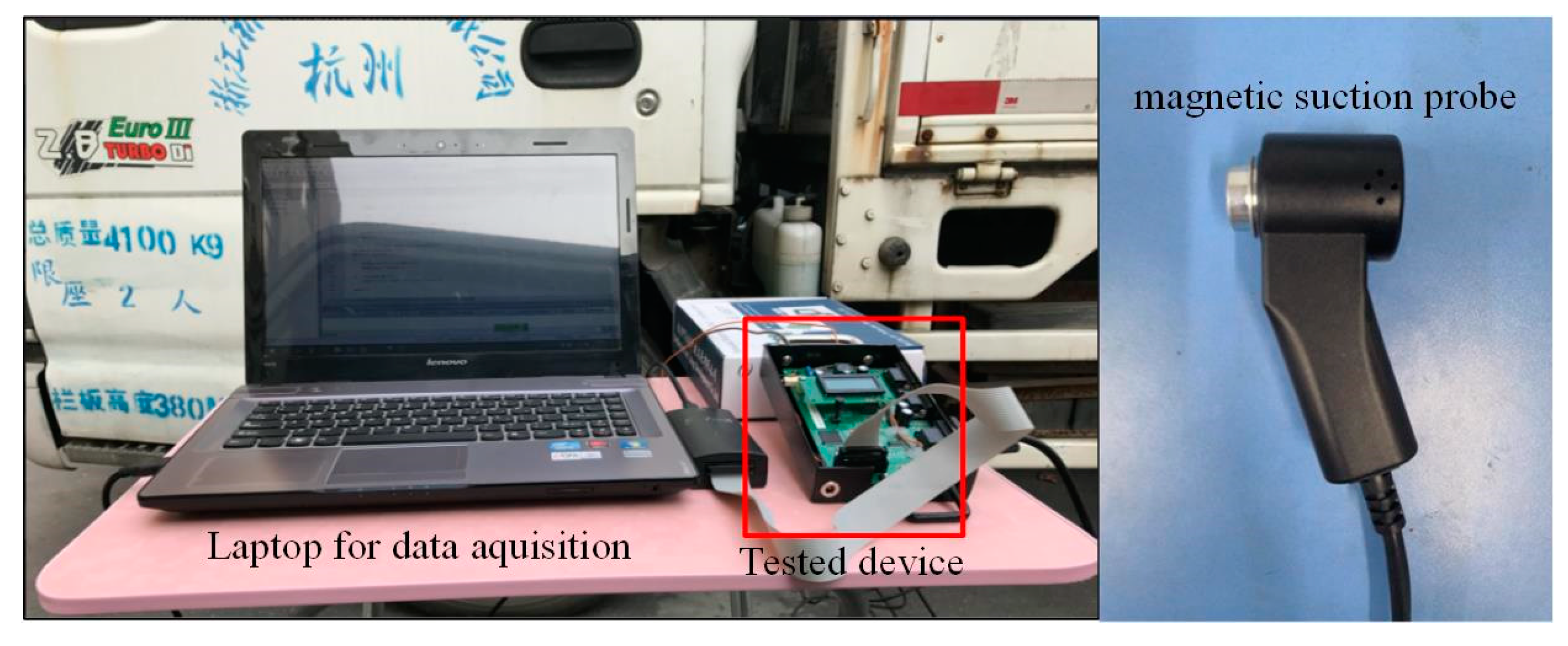
3.2. Test Results
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Gustafsson, F. Rotational Speed Sensors: Limitations, Pre-processing and Automotive Applications Part 23 in a Series of Tutorials on Instrumentation and Measurement. IEEE Instrum. Meas. Mag. 2010, 13, 16–23. [Google Scholar] [CrossRef]
- Arif, S.J.; Asghar, M.S.J.; Sarwar, A. Measurement of Speed and Calibration of Tachometers Using Rotating Magnetic Field. IEEE Trans. Instrum. Meas. 2014, 63, 848–858. [Google Scholar] [CrossRef]
- Chicharro, J.M.; Morales, A.L.; Moreno, R.; Nieto, A.J.; Pintado, P. Sensorless automotive engine speed measurement by noise analysis. In Proceedings of the 2009 IEEE International Conference on Mechatronics, Malaga, Spain, 14–17 April 2009; pp. 1–4. [Google Scholar]
- Jia-Dong, Z.; Guang-Yao, O.; Hong-Bin, G. Demodulation of instantaneous rotational speed of diesel engine based on Hilbert transform. In Proceedings of the 9th International Conference on Electronic Measurement & Instruments, Beijing, China, 16–19 August 2009; pp. 2-753–2-756. [Google Scholar]
- Kepak, S.; Stolarik, M.; Nedoma, J.; Martinek, R.; Kolarik, J.; Pinka, M. Alternative Approaches to Vibration Measurement Due to the Blasting Operation: A Pilot Study. Sensors 2019, 19, 4084. [Google Scholar] [CrossRef] [PubMed]
- Nedoma, J.; Stolarik, M.; Kepak, S.; Pinka, M.; Martinek, R.; Frnda, J.; Fridrich, M. Alternative Approaches to Measurement of Ground Vibrations Due to the Vibratory Roller: A Pilot Study. Sensors 2019, 19, 5420. [Google Scholar] [CrossRef] [PubMed]
- Santacruz, M.; Felix, M.; Ocampo, J.; Luna, G. Vibration Frequency Peak Detection and Sorting Technique for Passenger Vehicles. In Proceedings of the 2013 IEEE International Instrumentation and Measurement Technology Conference, Minneapolis, MN, USA, 6–9 May 2013; pp. 1353–1357. [Google Scholar]
- Amman, S.A.; Das, M. An efficient technique for modeling and synthesis of automotive engine sounds. IEEE Trans. Ind. Electron. 2001, 48, 225–234. [Google Scholar] [CrossRef]
- Belouchrani, A.; Amin, M.G. Time-frequency MUSIC. IEEE Signal Process. Lett. 1999, 6, 109–110. [Google Scholar] [CrossRef]
- Zhang, J.; Tang, L.; Mingotti, A.; Peretto, L.; Wen, H. Analysis of White Noise on Power Frequency Estimation by DFT-based Frequency Shifting and Filtering Algorithm. IEEE Trans. Instrum. Meas. 2019. [Google Scholar] [CrossRef]
- Zhang, J.; Wen, H.; Tang, L. Improved Smoothing Frequency Shifting and Filtering Algorithm for Harmonic Analysis With Systematic Error Compensation. IEEE Trans. Ind. Electron. 2019, 66, 9500–9509. [Google Scholar] [CrossRef]
- Marple, S.L. Digital Spectral Analysis With Applications; Prentice-Hall Inc.: Englewood Cliffs, NJ, USA, 1987; Volume 1. [Google Scholar]
- Miao, Q.A.; Cong, L.; Pecht, M. Identification of multiple characteristic components with high accuracy and resolution using the zoom interpolated discrete Fourier transform. Meas. Sci. Technol. 2011, 22, 055701. [Google Scholar] [CrossRef]
- Kaminsky, D.; Zidek, J.; Bilik, P. Virtual instrumentation based power quality analyzer. In Proceedings of the 6th IEEE International Conference on Intelligent Data Acquisition and Advanced Computing Systems, Prague, Czech Republic, 15–17 September 2011; pp. 184–187. [Google Scholar]
- Wen, H.; Li, C.; Yao, W. Power System Frequency hstimation of Sine-Wave Corrupted With Noise by Windowed Three-Point Interpolated DFT. IEEE Trans. Smart Grid 2018, 9, 5163–5172. [Google Scholar] [CrossRef]
- Wen, H.; Zhang, J.; Meng, Z.; Guo, S.; Li, F.; Yang, Y. Harmonic Estimation Using Symmetrical Interpolation FFT Based on Triangular Self-Convolution Window. IEEE Trans. Ind. Inform. 2015, 11, 16–26. [Google Scholar] [CrossRef]
- Wen, H.; Kish, L.B.; Klappenecker, A.; Peper, F. New noise-based logic representations to avoid some problems with time complexity. Fluct. Noise Lett. 2012, 11. [Google Scholar] [CrossRef]
- Lindfors, M.; Hendeby, G.; Gustafsson, F.; Karlsson, R.; IEEE. Vehicle Speed Tracking Using Chassis Vibrations. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium, Gothenburg, Sweden, 19–22 June 2016; pp. 214–219. [Google Scholar]
- Amarnath, M.; Krishna, I.R.P. Local fault detection in helical gears via vibration and acoustic signals using EMD based statistical parameter analysis. Measurement 2014, 58, 154–164. [Google Scholar] [CrossRef]
- Adamczak, S.; Janecki, D.; Makiela, W.; Stepien, K. Quantitative comparison of cylindricity profiles measured with different methods using legendre-fourier coefficients. Metrol. Meas. Syst. 2010, 17, 397–403. [Google Scholar] [CrossRef]
- Knapp, C.; Carter, G. The generalized correlation method for estimation of time delay. IEEE Trans. Acoust. Speech Signal Process. 1976, 24, 320–327. [Google Scholar] [CrossRef]
- Combet, F.; Gelman, L. An automated methodology for performing time synchronous averaging of a gearbox signal without speed sensor. Mech. Syst. Signal Process. 2007, 21, 2590–2606. [Google Scholar] [CrossRef]
- Song, X.; Li, X.; Zhang, W.G.; Zhou, W. The new measurement algorithm of the engine speed base on the basic frequency of vibration signal. In Proceedings of the 2010 International Conference on Computer, Mechatronics, Control and Electronic Engineering, Changchun, China, 24–26 August 2010; pp. 273–277. [Google Scholar]
- Cevher, V.; Chellappa, R.; McClellan, J.H. Vehicle Speed Estimation Using Acoustic Wave Patterns. IEEE Trans. Signal Process. 2009, 57, 30–47. [Google Scholar] [CrossRef]
- Oppenheim, A.V.; Willsky, A.S. Signals and Systems; Prentice Hall: Upper Saddle River, NJ, USA, 1983; p. xix+796. [Google Scholar]
- Yan, H.; Joy, D.; Lei, M. Convolution and correlation: A case study of scanning imaging and analysis systems. Scanning 2002, 24, 6–17. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.F.; Liu, H.Y.; Zhang, T.T.; Li, J.C. Application of Cross-correlation Algorithm in Radio Weak Signal Detection. In Proceedings of the 7th Annual Communication Networks And Services Research Conference, Moncton, NB, Canada, 11–13 May 2009; pp. 440–442. [Google Scholar]
- Offelli, C.; Petri, D. A frequency-domain procedure for accurate real-time signal parameter measurement. IEEE Trans. Instrum. Meas. 1990, 39, 363–368. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shan, X.; Tang, L.; Wen, H.; Martinek, R.; Smulko, J. Analysis of Vibration and Acoustic Signals for Noncontact Measurement of Engine Rotation Speed. Sensors 2020, 20, 683. https://doi.org/10.3390/s20030683
Shan X, Tang L, Wen H, Martinek R, Smulko J. Analysis of Vibration and Acoustic Signals for Noncontact Measurement of Engine Rotation Speed. Sensors. 2020; 20(3):683. https://doi.org/10.3390/s20030683
Chicago/Turabian StyleShan, Xuansheng, Lu Tang, He Wen, Radek Martinek, and Janusz Smulko. 2020. "Analysis of Vibration and Acoustic Signals for Noncontact Measurement of Engine Rotation Speed" Sensors 20, no. 3: 683. https://doi.org/10.3390/s20030683
APA StyleShan, X., Tang, L., Wen, H., Martinek, R., & Smulko, J. (2020). Analysis of Vibration and Acoustic Signals for Noncontact Measurement of Engine Rotation Speed. Sensors, 20(3), 683. https://doi.org/10.3390/s20030683