A Range-Independent Disparity-Based Calibration Model for Structured Light Pattern-Based RGBD Sensor


Abstract
1. Introduction
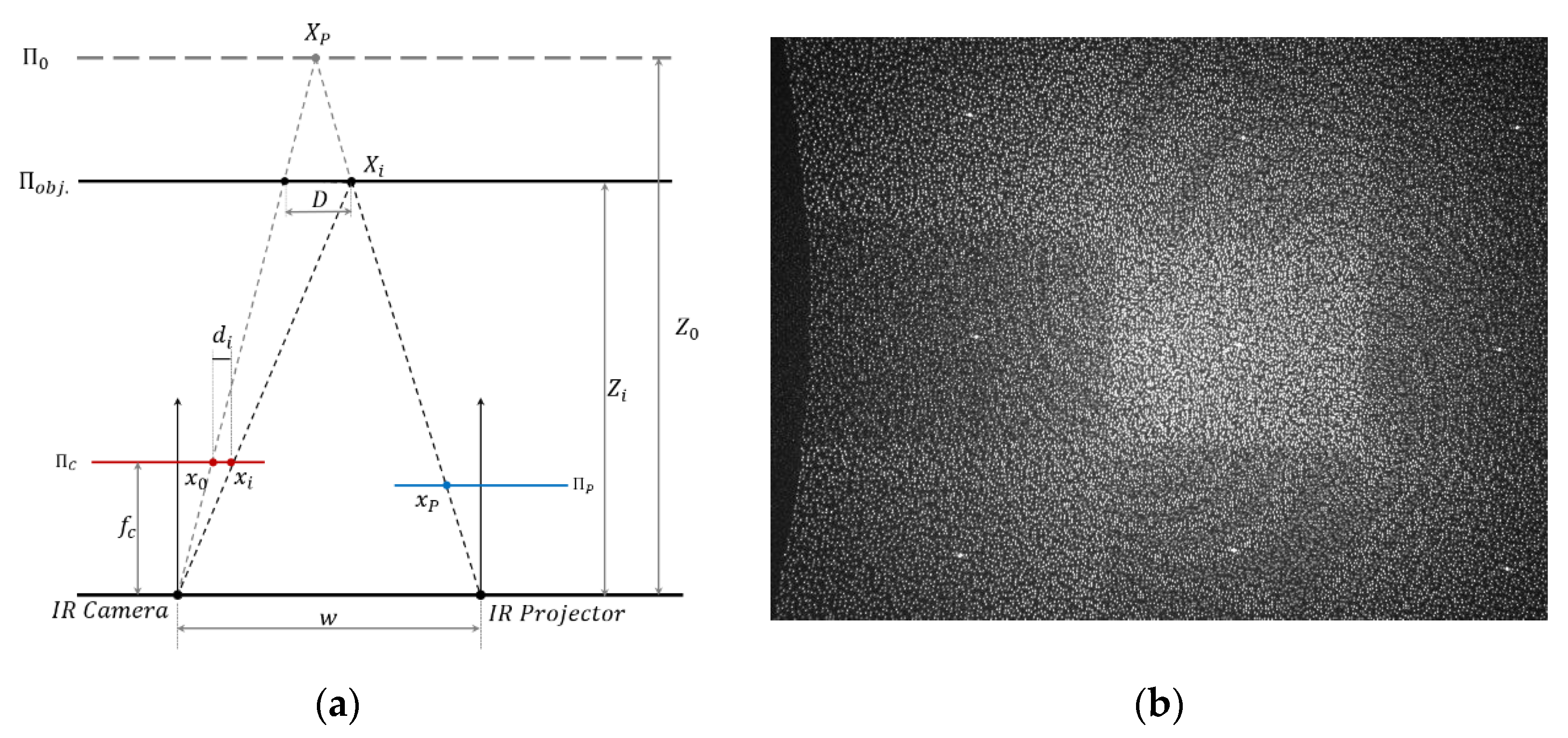
- is the reference distance from the sensor to the reference plane ;
- is the focal length of IR camera;
- is the baseline between the IR camera and IR projector;
- is the disparity for .
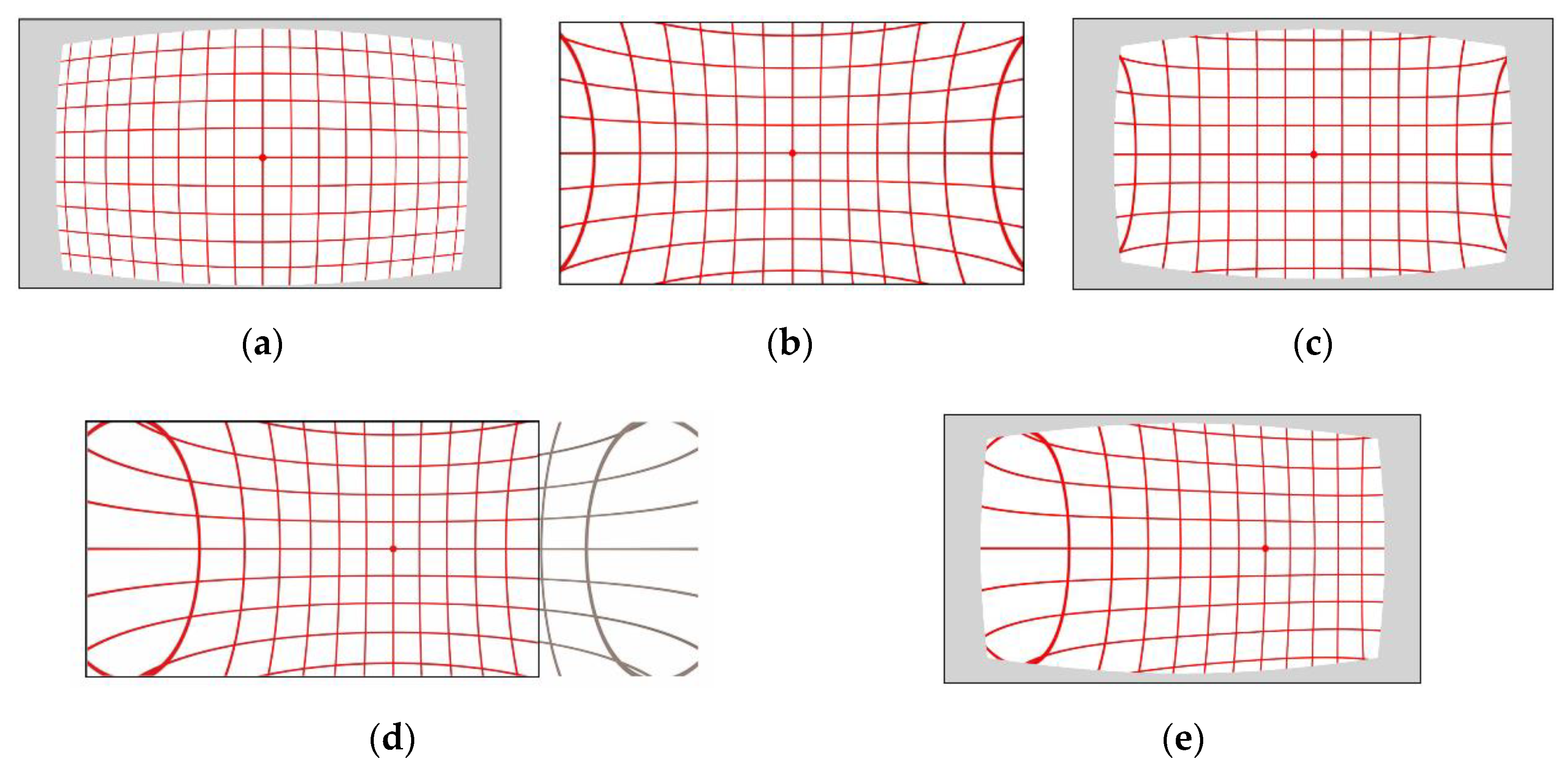
2. RGBD Distortion Model
- is the measurement value of disparity in pixel;
- is the true value of disparity in pixel with no error;
- is the distortion error caused by camera lens in pixel;
- is the distortion error caused by projector lens in pixel.
- = distorted image point as projected on image plane;
- = undistorted image point as projected by an ideal pinhole camera;
- = distortion centre;
- radial distortion coefficient;
- tangential distortion coefficient; and
- .
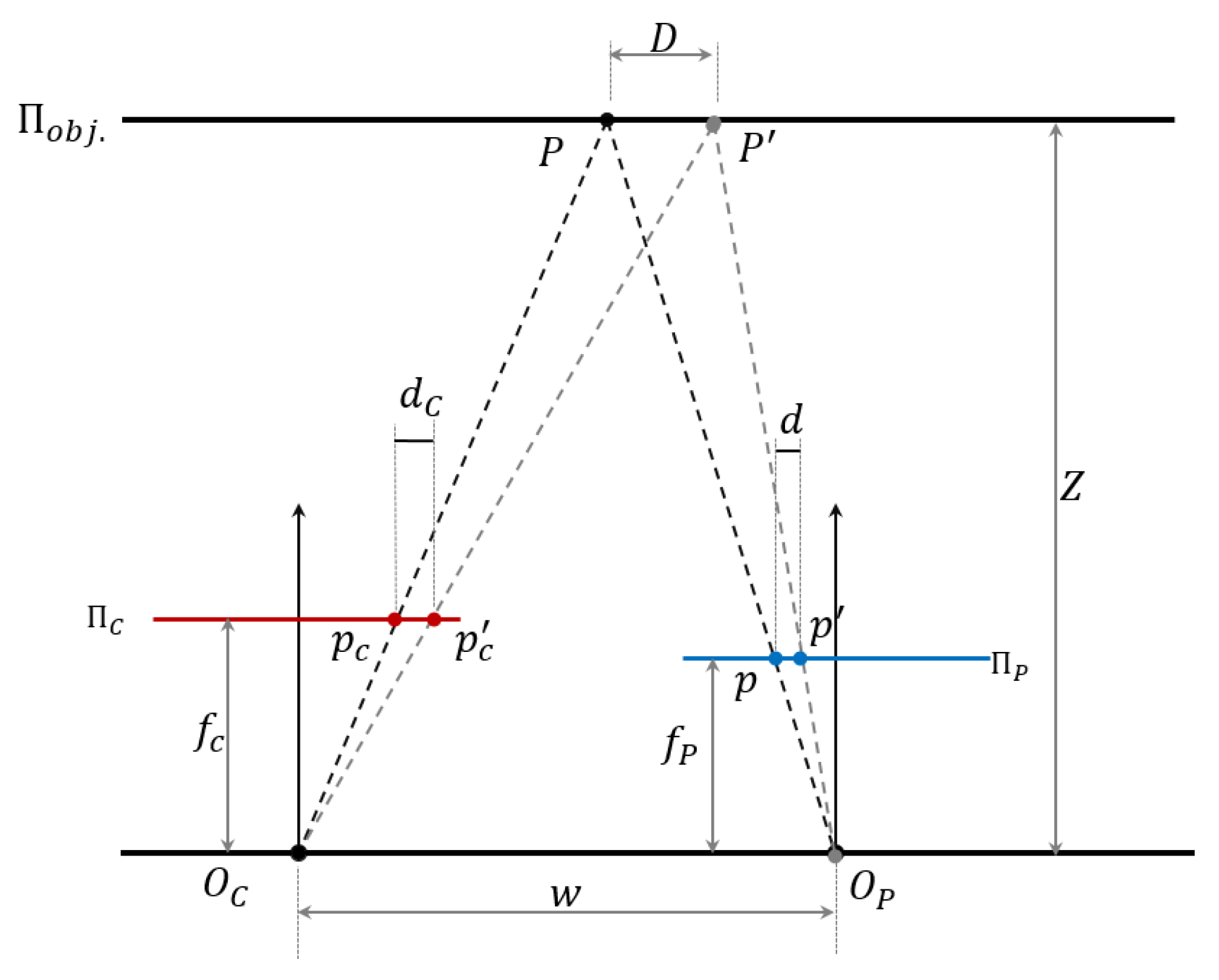
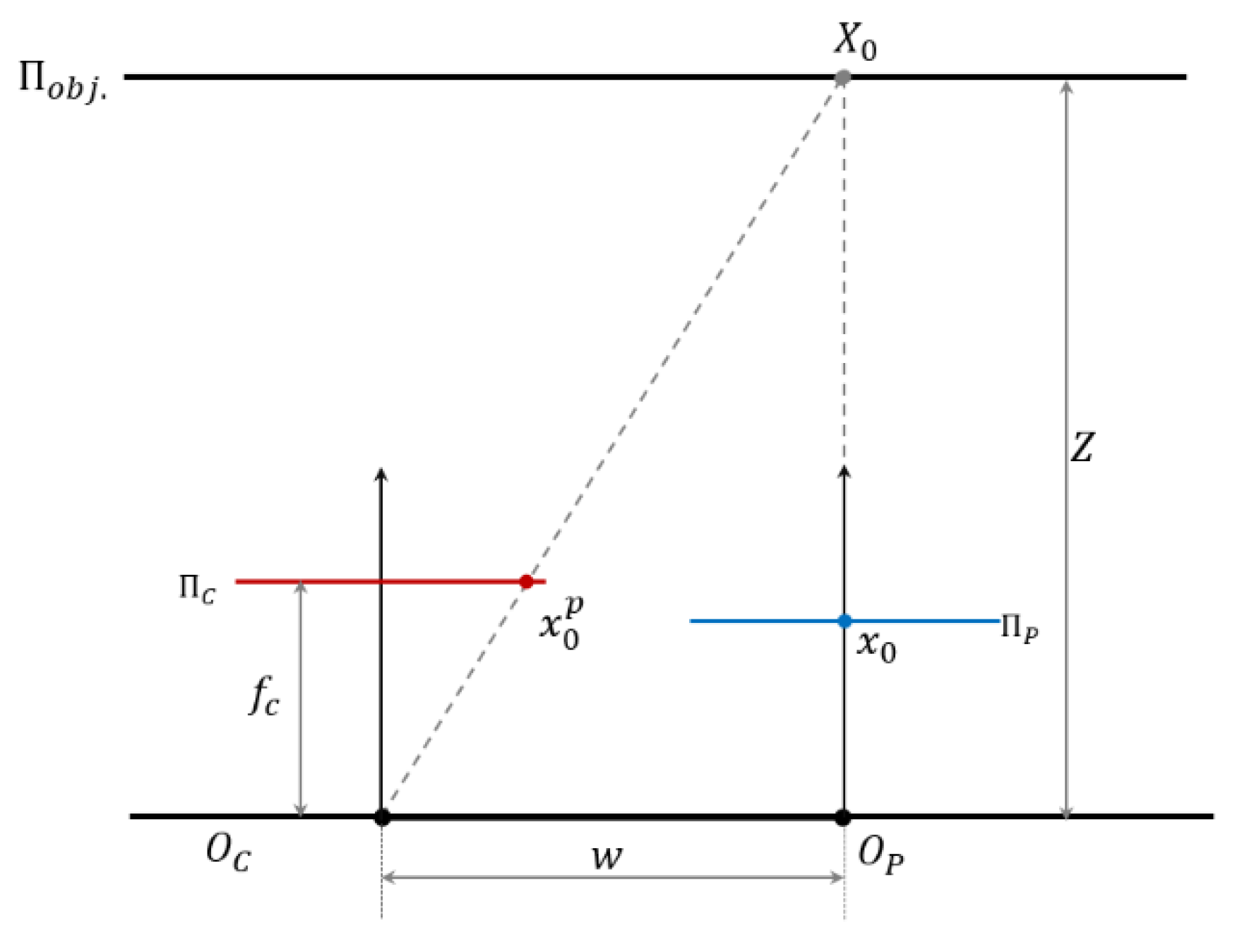
- is the focal length of projector lens and camera lens;
- is the optical centre of the projector lens and camera lens;
- is the object plane;
- is the projector pattern plane;
- is the camera image plane;
- is the undistorted and distorted pattern location in projector pattern plane ;
- is the undistorted and distorted pattern location casted into the object plane ;
- is the undistorted and distorted pixel captured by camera in image plane ;
- is the pixel difference in projector plane ;
- is the pixel difference in image plane ;
- is the location difference in object plane ;
- is the baseline between camera centre and projector centre;
- is the distance from baseline to object plane.
- is the measurement value of normalized disparity;
- are the normalize parameter of disparity;
- is the true value of disparity in pixel with no error;
- is the distortion error caused by camera lens in pixel;
- is the distortion error caused by projector lens in pixel;
- is the true value of normalized disparity.
- is the radial distortion of the IR camera;
- is the tangential distortion of the IR camera;
- is the radial distortion of the IR projector;
- is the tangential distortion of vIR projector;
- , ;
- is the camera or projector centre;
- is measured image coordinate;
- is the parameters of radial distortion model;
- is the parameters of tangential distortion model.
- are the distortion parameters of the IR camera;
- ; ; ;
- is the centre point of camera;
- is the measured image position;
- are the distortion parameters of the IR projector;
- ; ; ;
- is the centre point of projector distortion model in image coordinates;
- is the measured image position without the influence of camera distortion.
3. Calibration of Structured Light Pattern (SLP) RGBD Sensor
3.1. Data Acquisition and Data Processing
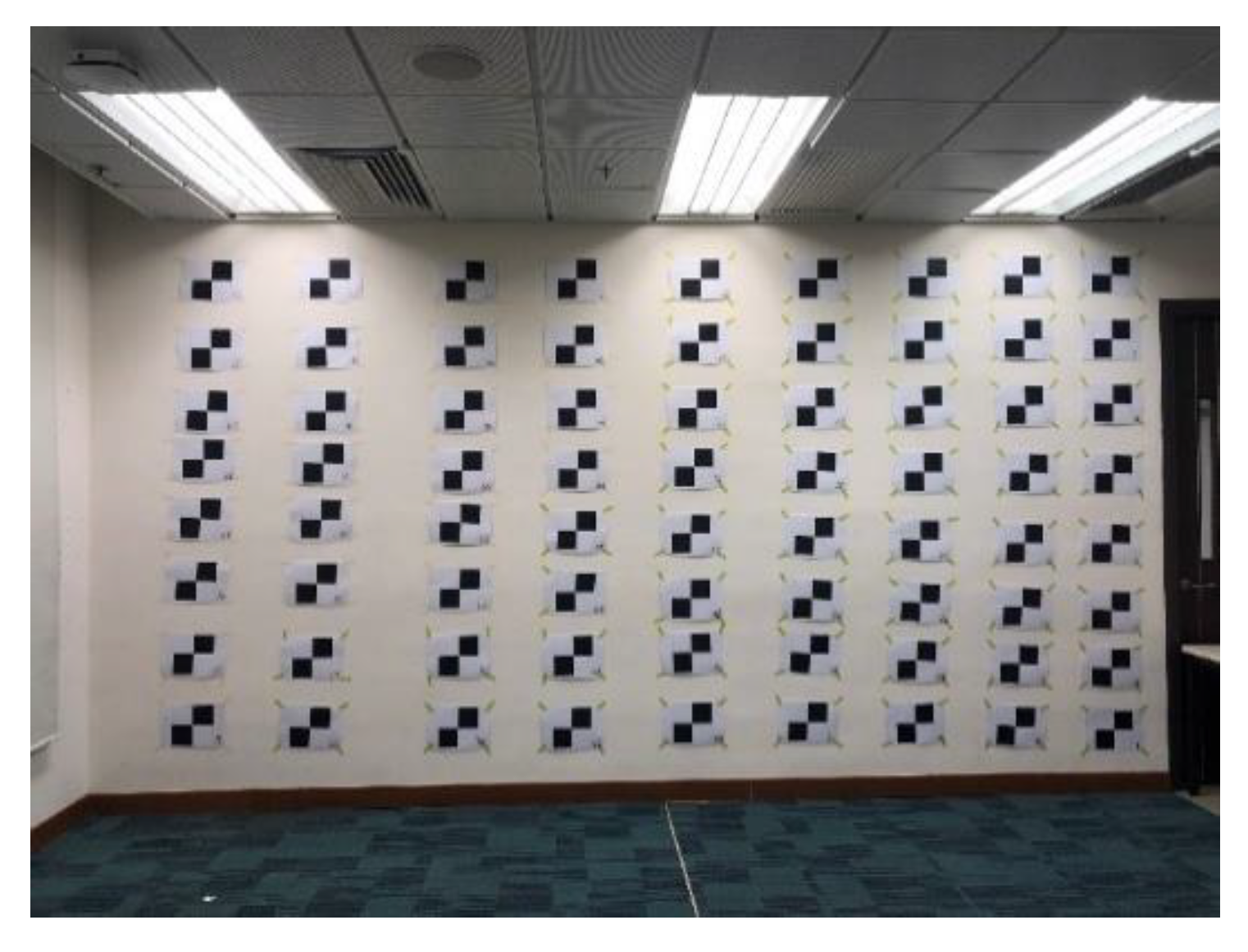
- Establish a control plane by placing the control markers with known coordinates measured by total stations.
- Fit the plane equation of the control plane.
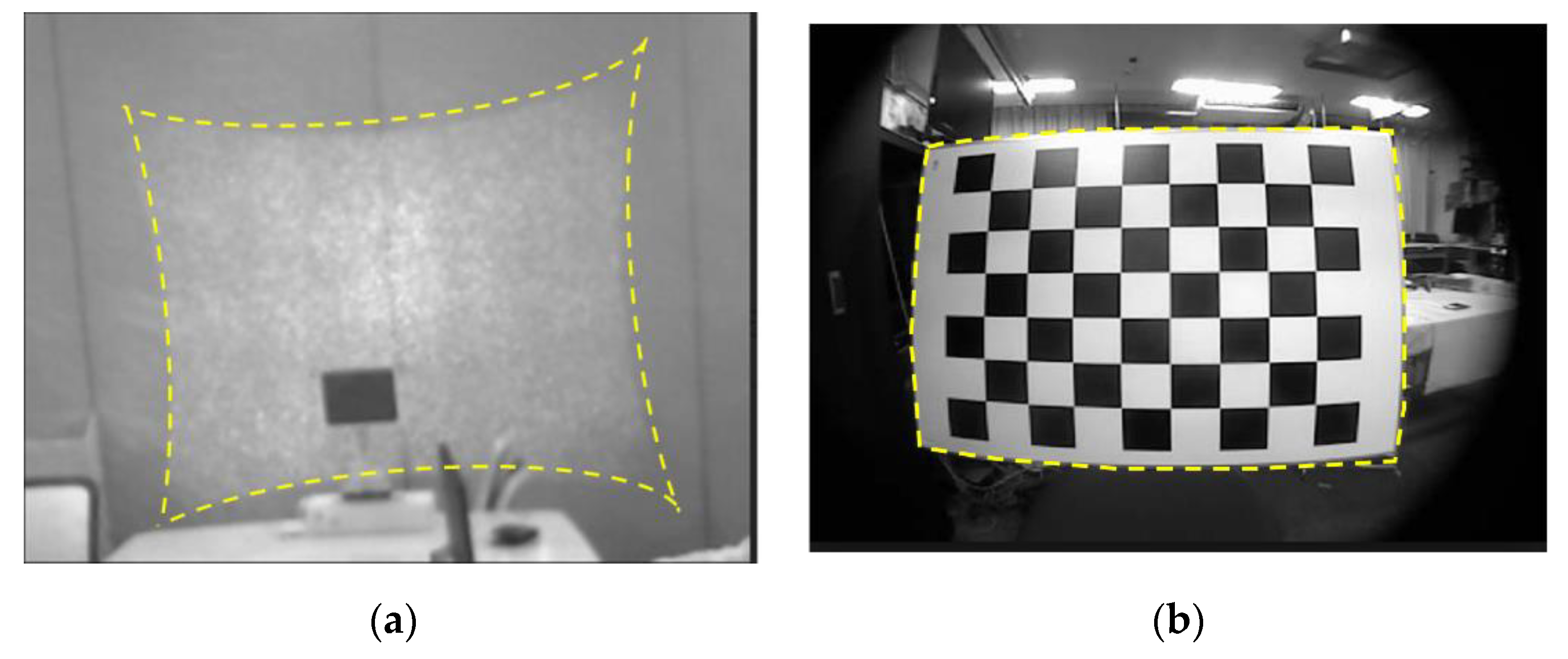
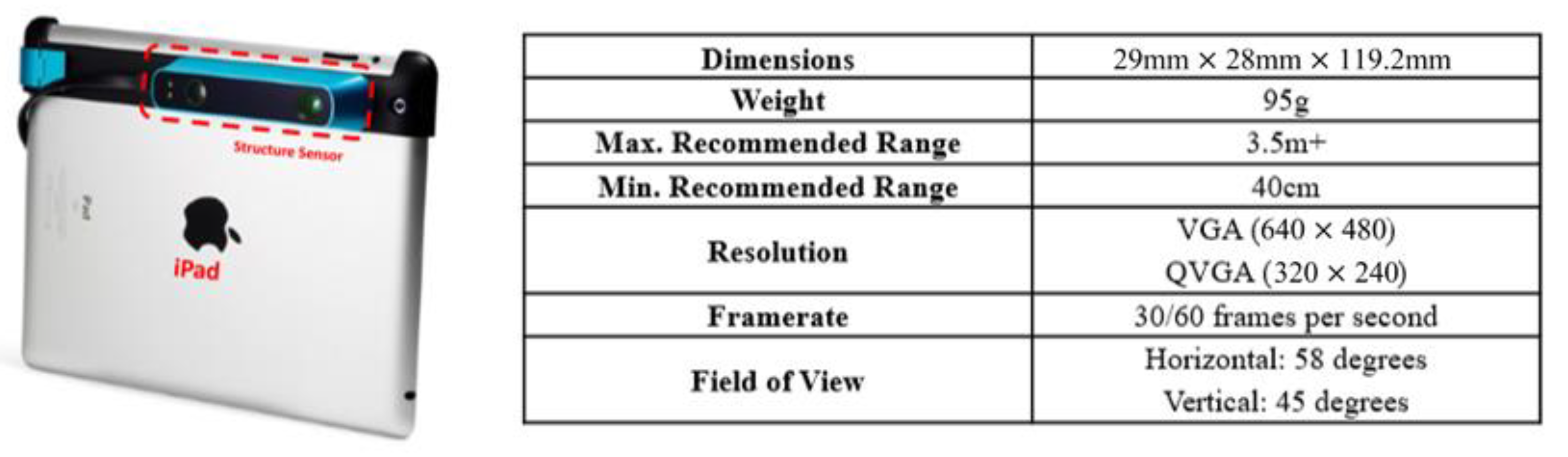
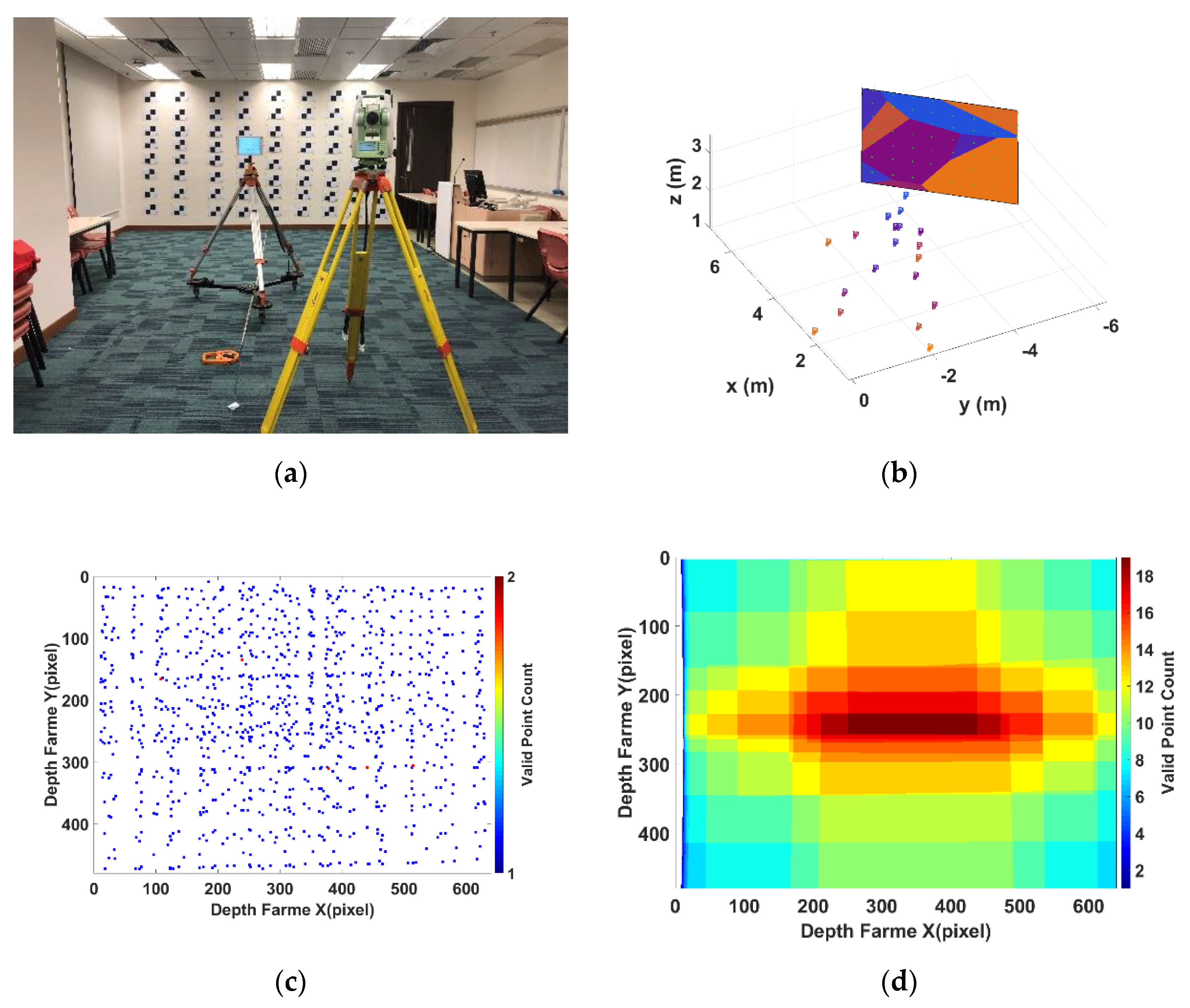
- Place the Structure Sensor in front of the control wall and take multiple observations (100 observations) at each designed distance (from 0.5 m to 6.5 m with an interval of about 0.5 m), as shown in Figure 8a,b.
- Calculate the pixel-wise average depth frame for each distance to reduce the effect of random noise in each pixel.
- Use the perspective-n-point algorithm [33] to calculate the camera extrinsic parameters for each distance based on the correspondences between the control wall and the depth frame.
- Unify the coordinates system between Structure Sensor and the control wall based on the calculated camera extrinsic parameters in 5.
- Calculate the ground truth depth for each distance based on the fitted control plane equation.
- Calculate the ground truth disparity based on the processed ground truth depth.
- Use the ground truth disparity to calculate the disparity error of the averaged disparity measurement in each distance.
3.2. Model Parameter Estimation
4. Calibration Model Performance
4.1. Model Evaluation
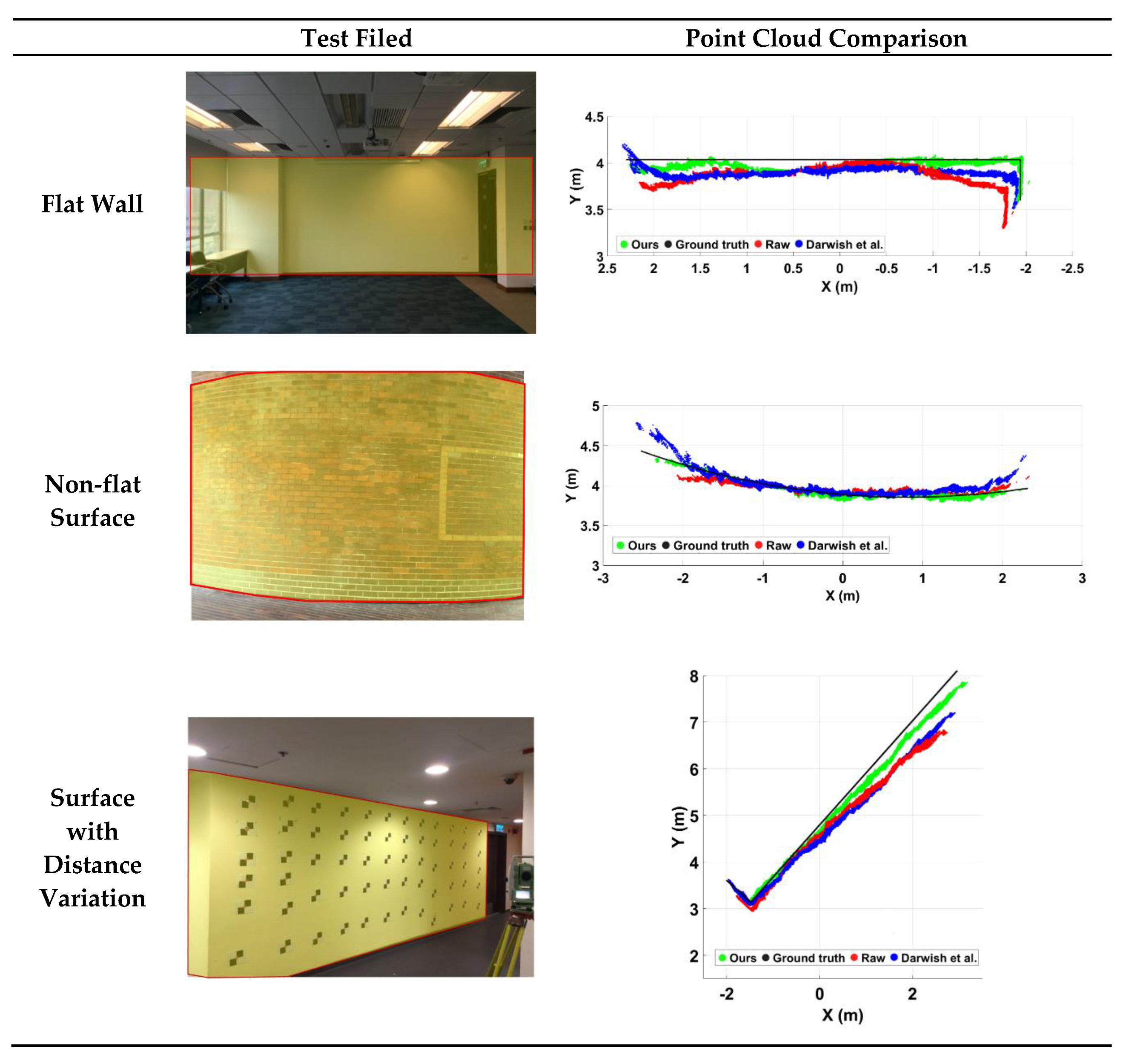
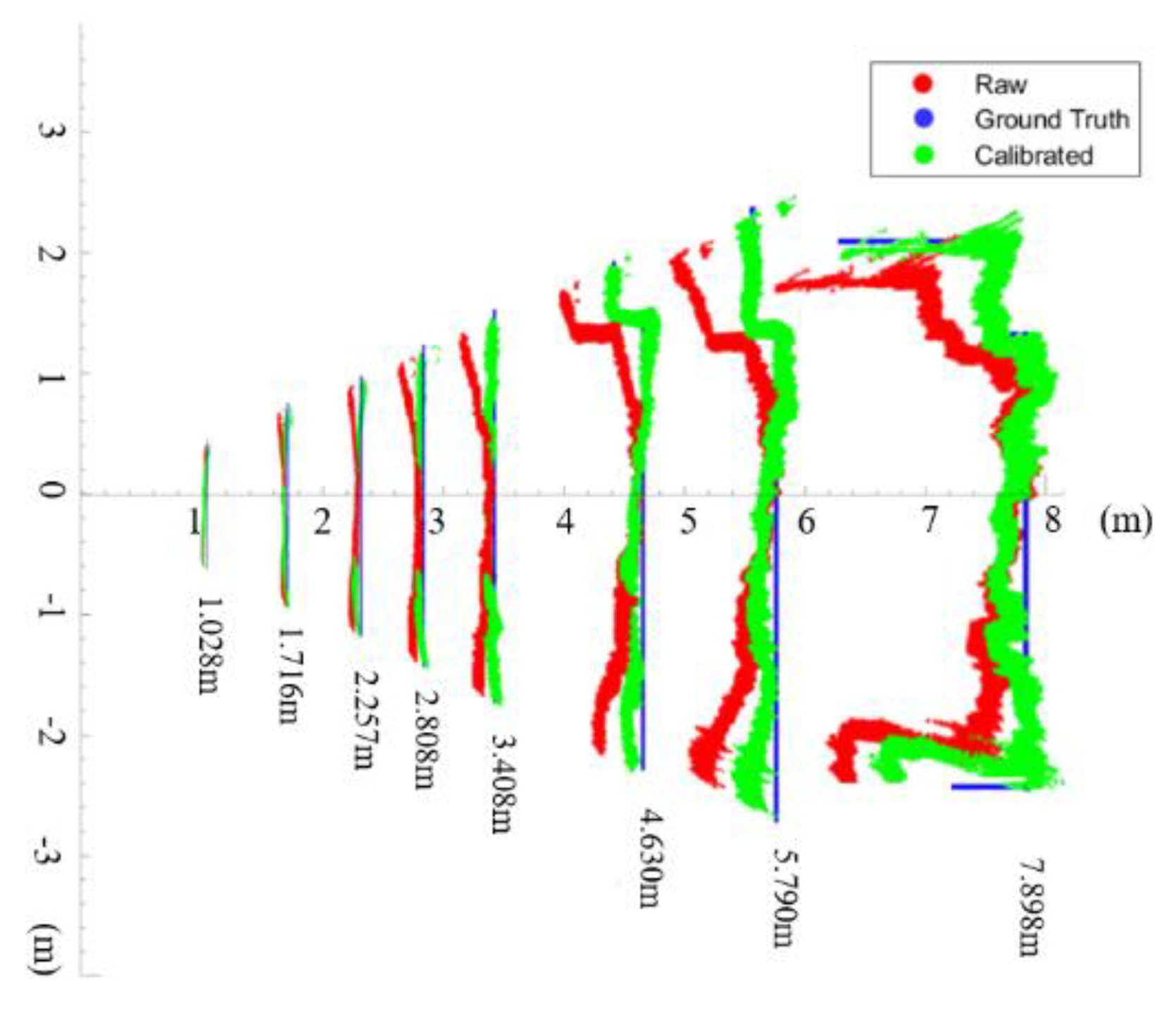
4.2. Point Cloud Correction
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Newcombe, R.A.; Izadi, S.; Hilliges, O.; Molyneaux, D.; Kim, D.; Davison, A.J.; Kohli, P.; Shotton, J.; Hodges, S.; Fitzgibbon, A.W. Kinectfusion: Real-time dense surface mapping and tracking. In Proceedings of the 2011 10th ISMAR, Basel, Switzerland, 26–29 October 2011; pp. 127–136. [Google Scholar]
- Wang, K.; Zhang, G.; Bao, H. Robust 3D reconstruction with an RGB-D camera. IEEE Trans. Image Process. 2014, 23, 4893–4906. [Google Scholar] [CrossRef]
- Mur-Artal, R.; Montiel, J.M.M.; Tardos, J.D. ORB-SLAM: A versatile and accurate monocular SLAM system. IEEE Trans. Robot. 2015, 31, 1147–1163. [Google Scholar] [CrossRef]
- Karaman, S.; Anders, A.; Boulet, M.; Connor, J.; Gregson, K.; Guerra, W.; Guldner, O.; Mohamoud, M.; Plancher, B.; Shin, R. Project-based, collaborative, algorithmic robotics for high school students: Programming self-driving race cars at MIT. In Proceedings of the 2017 IEEE Integrated STEM Education Conference (ISEC), Princeton, NJ, USA, 11 March 2017; pp. 195–203. [Google Scholar]
- Khan, A.; Moideen, F.; Lopez, J.; Khoo, W.L.; Zhu, Z. KinDectect: Kinect detecting objects. In Proceedings of the International Conference on Computers for Handicapped Persons, Linz, Austria, 11–13 July 2012; pp. 588–595. [Google Scholar]
- Wasenmüller, O.; Stricker, D. Comparison of kinect v1 and v2 depth images in terms of accuracy and precision. In Proceedings of the Asian Conference on Computer Vision, Taipei, Taiwan, 20–24 November 2016; pp. 34–45. [Google Scholar]
- Occipital. Structure Sensor. Available online: https://structure.io/ (accessed on 8 January 2019).
- Asus. Use Xtion PRO Developer Solution to Make Motion-Sensing Applications and Games. Available online: https://www.asus.com/3D-Sensor/Xtion_PRO/ (accessed on 5 June 2019).
- Introducing Intel® RealSense™ LiDAR Camera L515. Available online: https://www.intel.com/content/www/us/en/architecture-and-technology/realsense-overview.html (accessed on 8 January 2019).
- ZED. Meet ZED. Available online: https://www.stereolabs.com/zed/ (accessed on 8 January 2019).
- MIT. PrimeSense-MIT Technology Review. Available online: http://www2.technologyreview.com/tr50/primesense/ (accessed on 28 October 2019).
- Zennaro, S.; Munaro, M.; Milani, S.; Zanuttigh, P.; Bernardi, A.; Ghidoni, S.; Menegatti, E. Performance evaluation of the 1st and 2nd generation Kinect for multimedia applications. In Proceedings of the 2015 IEEE International Conference on Multimedia and Expo (ICME), Turin, Italy, 29 June–3 July 2015; pp. 1–6. [Google Scholar]
- Herrera, D.; Kannala, J.; Heikkilä, J. Joint depth and colour camera calibration with distortion correction. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2058–2064. [Google Scholar] [CrossRef]
- Konolige, K.; Mihelich, P. Technical Description of Kinect Calibration. 2011. Available online: http://www.wiki.ros.org/kinect_calibration/technical (accessed on 8 January 2019).
- Smisek, J.; Jancosek, M.; Pajdla, T. 3D with Kinect. In Consumer Depth Cameras for Computer Vision; Springer: Berlin/Heidelberg, Germany, 2013; pp. 3–25. [Google Scholar]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, Z. Calibration between depth and colour sensors for commodity depth cameras. In Computer Vision and Machine Learning with RGB-D Sensors; Springer: Berlin/Heidelberg, Germany, 2011; pp. 47–64. [Google Scholar]
- Canessa, A.; Chessa, M.; Gibaldi, A.; Sabatini, S.P.; Solari, F. Calibrated depth and colour cameras for accurate 3D interaction in a stereoscopic augmented reality environment. J. Vis. Commun. Image Represent. 2014, 25, 227–237. [Google Scholar] [CrossRef]
- Darwish, W.; Tang, S.; Li, W.; Chen, W. A new calibration method for commercial RGB-D sensors. Sensors 2017, 17, 1204. [Google Scholar] [CrossRef] [PubMed]
- Chow, J.C.; Lichti, D.D. Photogrammetric bundle adjustment with self-calibration of the PrimeSense 3D camera technology: Microsoft Kinect. IEEE Access 2013, 1, 465–474. [Google Scholar] [CrossRef]
- Darwish, W.; Tang, S.; Li, W.; Chen, W. Full Parameter Calibration for Low Cost Depth Sensors. In Proceedings of the Melaha 2016 International Conference and Exhibition, Cairo, Egypt, 24–26 October 2016. [Google Scholar]
- Darwish, W.; Li, W.; Tang, S.; Chen, W. Coarse to fine global RGB-D frames registration for precise indoor 3D model reconstruction. In Proceedings of the 2017 International Conference on Localization and GNSS (ICL-GNSS), Nottingham, UK, 27–29 June 2017; pp. 1–5. [Google Scholar]
- Mallick, T.; Das, P.P.; Majumdar, A.K. Characterizations of noise in Kinect depth images: A review. IEEE Sensors J. 2014, 14, 1731–1740. [Google Scholar] [CrossRef]
- Zhang, Z. Microsoft kinect sensor and its effect. IEEE Multimed. 2012, 19, 4–10. [Google Scholar] [CrossRef]
- Zhang, Z. Flexible camera calibration by viewing a plane from unknown orientations. In Proceedings of the 7th ICCV, Kerkyra, Greece, 20–27 September 1999; pp. 666–673. [Google Scholar]
- Moreno, D.; Taubin, G. Simple, accurate, and robust projector-camera calibration. In Proceedings of the 2012 Second International Conference on 3D Imaging, Modeling, Processing, Visualization & Transmission, Zurich, Switzerland, 13–15 October 2012; pp. 464–471. [Google Scholar]
- Hüe, F.; Johnson, C.; Lartigue-Korinek, S.; Wang, G.; Buseck, P.; Hÿtch, M. Calibration of projector lens distortions. J. Electron Microsc. 2005, 54, 181–190. [Google Scholar] [CrossRef] [PubMed]
- Kimura, M.; Mochimaru, M.; Kanade, T. Projector calibration using arbitrary planes and calibrated camera. In Proceedings of the 2007 IEEE Conference on Computer Vision and Pattern Recognition, Minneapolis, MN, USA, 17–22 June 2007; pp. 1–2. [Google Scholar]
- Qualisys. Miqus Technical Specifications. Available online: https://cdn-content.qualisys.com/2019/07/PI_Miqus_0.pdf (accessed on 8 January 2019).
- Occipital. Structure Sensor Sepcification. Available online: https://structure.io/structure-core/specs (accessed on 8 January 2019).
- Brown, D.C. Decentering distortion of lenses. Photogramm. Eng. Remote Sens. 1966, 32, 444–462. [Google Scholar]
- Zhang, S.; Huang, P.S. Novel method for structured light system calibration. Opt. Eng. 2006, 45, 083601. [Google Scholar]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Lachat, E.; Macher, H.; Landes, T.; Grussenmeyer, P. Assessment and calibration of a RGB-D camera (Kinect v2 Sensor) towards a potential use for close-range 3D modeling. Remote Sens. 2015, 7, 13070–13097. [Google Scholar] [CrossRef]
- Schmalz, C. Robust Single-Shot Structured Light 3D Scanning. Ph.D. Thesis, Friedrich–Alexander University Erlangen–Nürnberg, Eralngena and Nuremberg, Bavaria, Germany, 2012. [Google Scholar]
- Gill, P.E.; Murray, W. Algorithms for the solution of the nonlinear least-squares problem. SIAM J. Numer. Anal. 1978, 15, 977–992. [Google Scholar] [CrossRef]
- Mindru, F.; Moons, T.; Van Gool, L. Recognizing colour patterns irrespective of viewpoint and illumination. In Proceedings of the 1999 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (Cat. No PR00149), Fort Collins, CO, USA, 23–25 June 1999; pp. 368–373. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Camera Parameter | Radial Distortion | Tangential Distortion | Normalized Coefficient | |||
|---|---|---|---|---|---|---|
| Structure Sensor | −0.0578 | 0.1248 | 1.0212 × 10−4 | −0.0010 | −6.0139 × 10−4 | 7.9418 |
| Projector Parameter | Radial Distortion | Tangential Distortion | |||
|---|---|---|---|---|---|
| Structure Sensor | 0.0474 | −0.0714 | −0.1014 | 0.0019 | 1.4390 × 10−4 |
| Polynomial Parameters | Value | Polynomial Parameters | Value |
|---|---|---|---|
| 0.5432 | −0.6831 | ||
| −0.0579 | 0.0604 | ||
| 0.1775 | 0.0535 | ||
| 0.1471 | −0.0368 | ||
| 0.0113 | −0.0515 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Li, Y.; Darwish, W.; Tang, S.; Hu, Y.; Chen, W. A Range-Independent Disparity-Based Calibration Model for Structured Light Pattern-Based RGBD Sensor. Sensors 2020, 20, 639. https://doi.org/10.3390/s20030639
Li W, Li Y, Darwish W, Tang S, Hu Y, Chen W. A Range-Independent Disparity-Based Calibration Model for Structured Light Pattern-Based RGBD Sensor. Sensors. 2020; 20(3):639. https://doi.org/10.3390/s20030639
Chicago/Turabian StyleLi, Wenbin, Yaxin Li, Walid Darwish, Shengjun Tang, Yuling Hu, and Wu Chen. 2020. "A Range-Independent Disparity-Based Calibration Model for Structured Light Pattern-Based RGBD Sensor" Sensors 20, no. 3: 639. https://doi.org/10.3390/s20030639
APA StyleLi, W., Li, Y., Darwish, W., Tang, S., Hu, Y., & Chen, W. (2020). A Range-Independent Disparity-Based Calibration Model for Structured Light Pattern-Based RGBD Sensor. Sensors, 20(3), 639. https://doi.org/10.3390/s20030639