Design Reliable Bus Structure Distributed Fiber Bragg Grating Sensor Network Using Gated Recurrent Unit Network



Abstract
1. Introduction
- To design a reliable multi-point sensing bus structure FBG sensor network.
- To increase the number of FBG sensors using IWDM techniques.
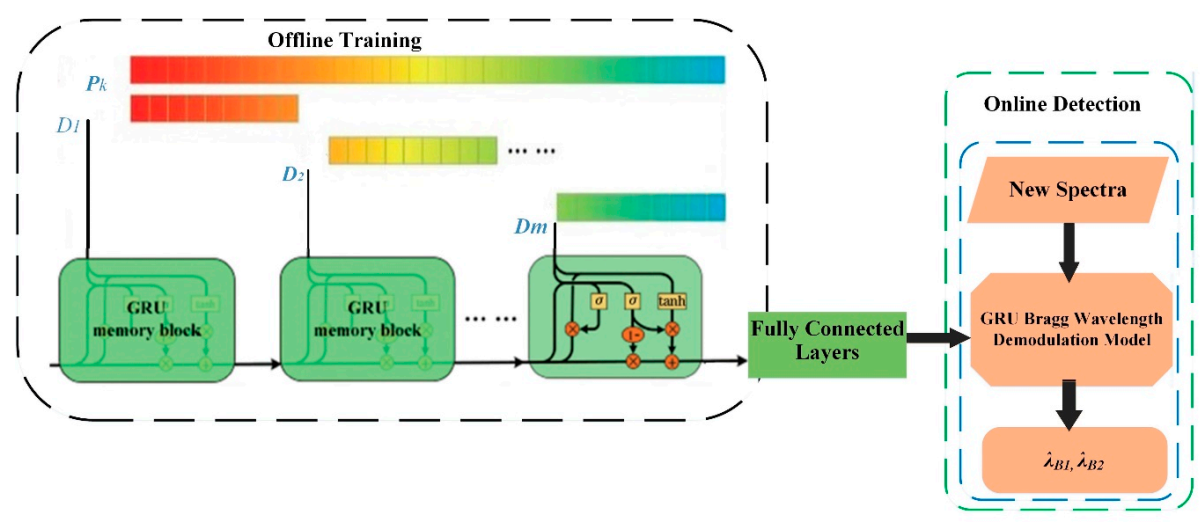
- To demonstrate the promising GRU model for accurate Bragg wavelength detection of each FBG sensor from the overlapping spectra.
- To confirm the preferentiality of the proposed GRU model in Bragg wavelength detection over other traditional and recently proposed machine learning models.
- To verify the performance of the proposed FBG sensor network in terms of computational time, Bragg wavelength detection accuracy, and multiplexing capability as the number of FBG sensors in the network is increased.
2. Operational Principle and Experimental Setup
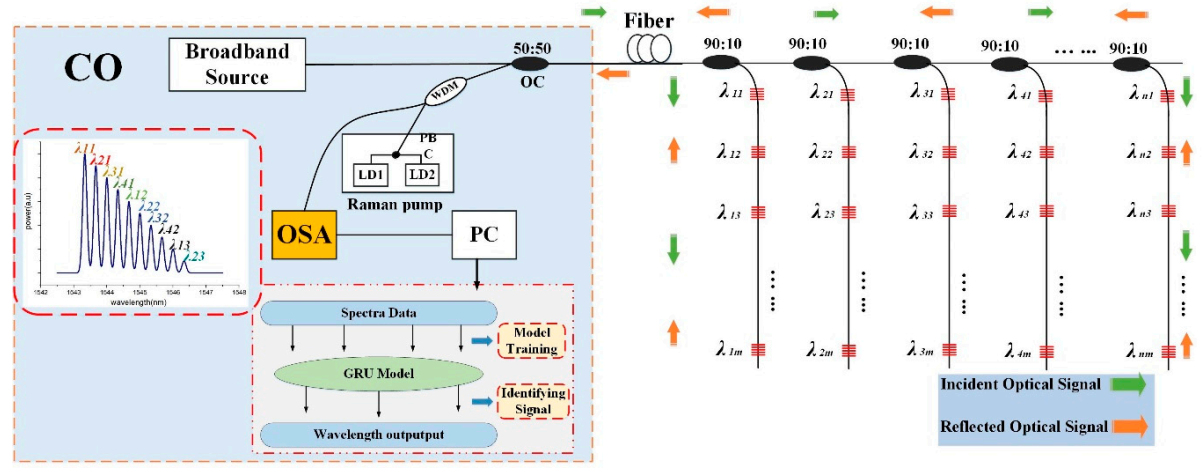
2.1. Schematic Diagram of Bus Architecture Multi-Point FBG Sensor Network
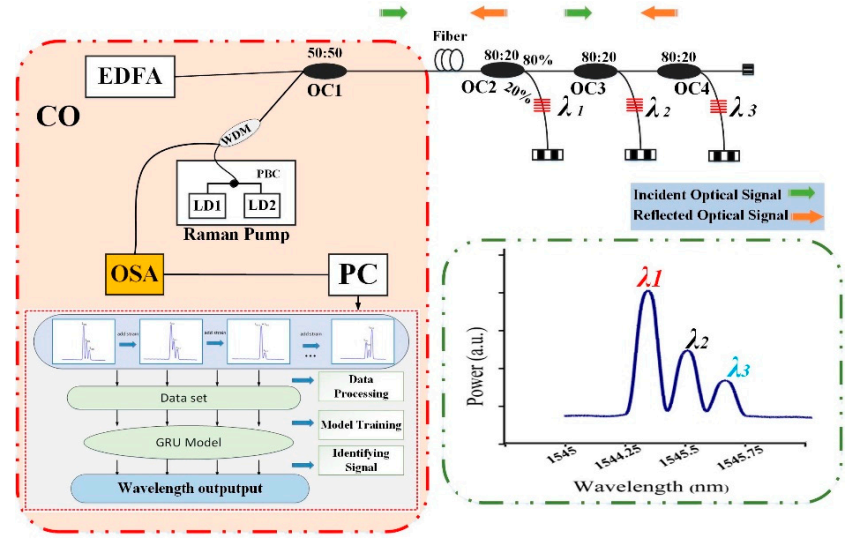
2.2. Experimental Setup of IWDM-Based Bus Structure Sensor Network
3. Methodology
3.1. Dataset Collection and Data Pre-Processing
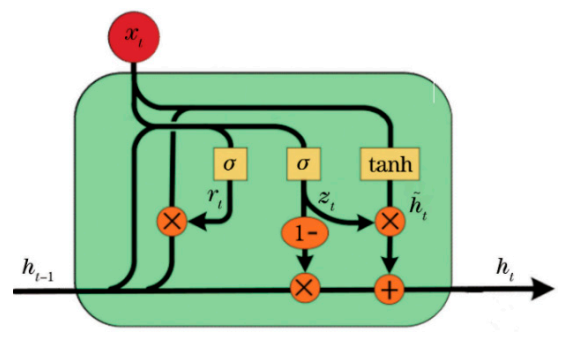
3.2. Gated Recurrent Unit Basic Principles
4. Results and Discussion
4.1. Gated Recurrent Unit (GRU) Model Structure
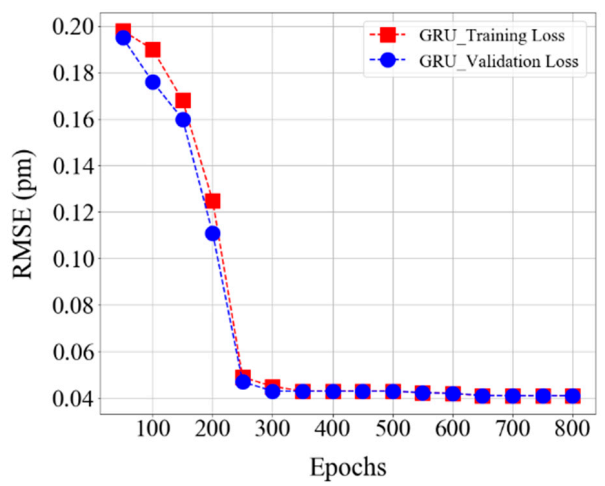
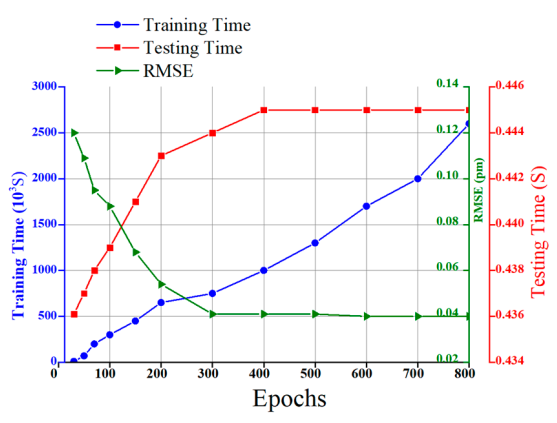
4.2. Optimal Parameter Selection and Performance Comparison
4.3. GRU Performance Testing and Evaluation
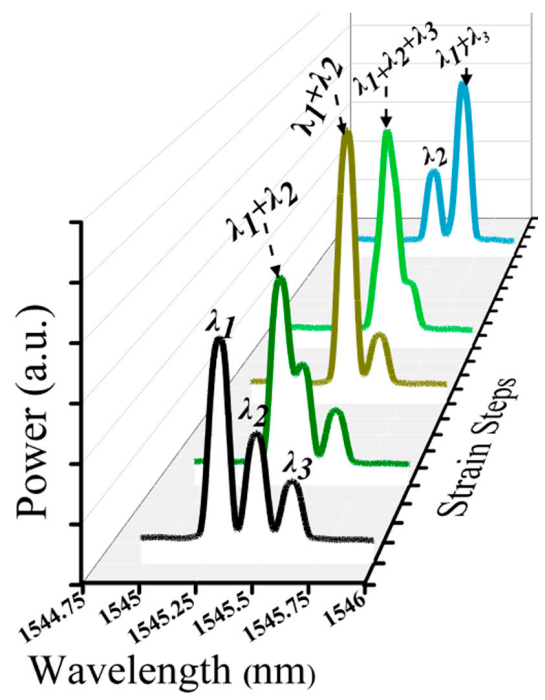
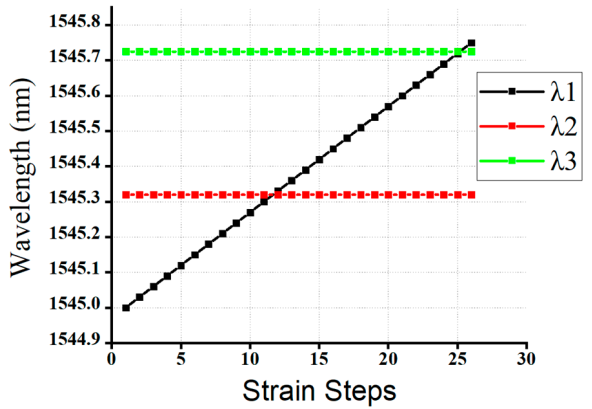
4.3.1. Case One: 3-FBG Sensor Network Variable Strain Effect Detection
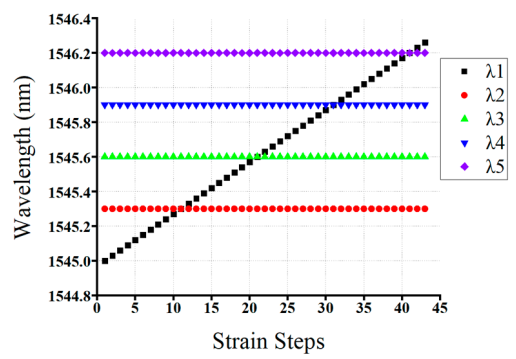
4.3.2. Case Two: 5-FBG Sensor Network Variable Strain Effect Detection
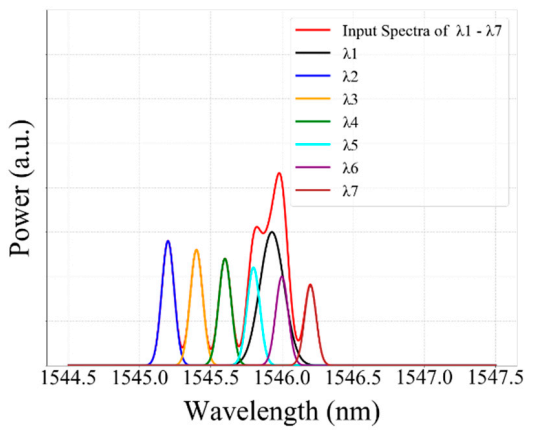
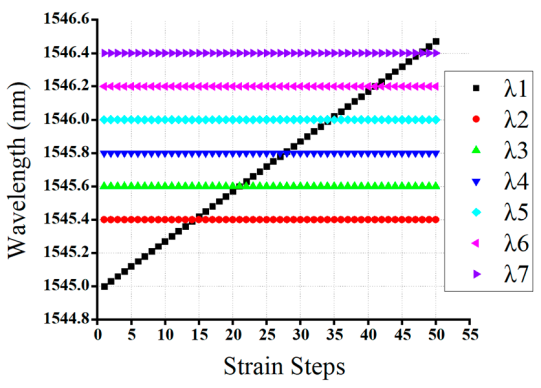
4.3.3. Case Three: 7-FBG Sensor Network Variable Strain Effect Detection
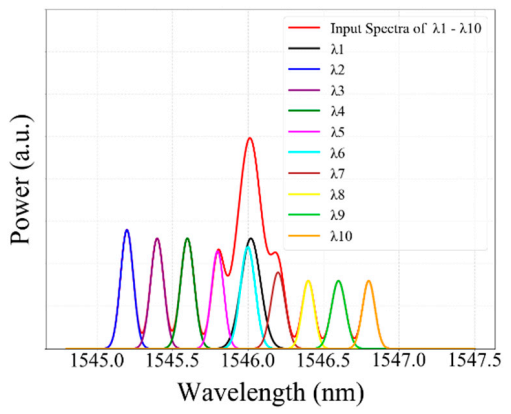
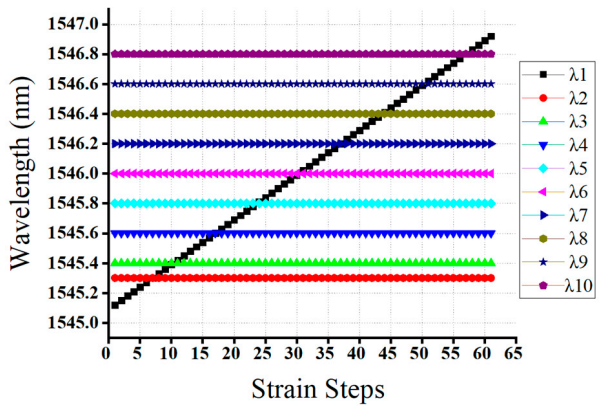
4.3.4. Case Four: 10-FBG Sensor Network Variable Strain Effect Detection
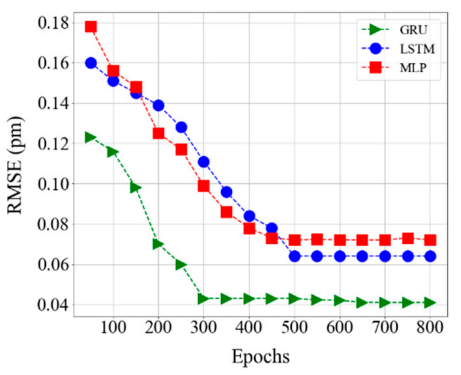
4.4. Comparison of the Model
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gope, P.; Hwang, T. BSN-Care: A Secure IoT-Based Modern Healthcare System Using Body Sensor Network. IEEE Sens. J. 2016, 16, 1368–1376. [Google Scholar] [CrossRef]
- Jia, D.; Zhang, Y.; Chen, Z.; Zhang, H.; Liu, T.; Zhang, Y. A Self-Healing Passive Fiber Bragg Grating Sensor Network. J. Light Technol. 2015, 33, 2062–2067. [Google Scholar] [CrossRef]
- Manie, Y.C.; Peng, P.-C.; Shiu, R.-K.; Hsu, Y.-T.; Chen, Y.-Y.; Shao, G.-M.; Chiu, J. Enhancement of the Multiplexing Capacity and Measurement Accuracy of FBG Sensor System Using IWDM Technique and Deep Learning Algorithm. J. Light Technol. 2020, 38, 1589–1603. [Google Scholar] [CrossRef]
- Fernandez-Vallejo, M.; Lopez-Amo, M. Optical Fiber Networks for Remote Fiber Optic Sensors. Sensors 2012, 12, 3929–3951. [Google Scholar] [CrossRef] [PubMed]
- Zhang, W.; Zhang, M.; Wang, X.; Zhao, Y.; Jin, B.; Dai, W. The Analysis of FBG Central Wavelength Variation with Crack Propagation Based on a Self-Adaptive Multi-Peak Detection Algorithm. Sensors 2019, 19, 1056. [Google Scholar] [CrossRef]
- Xiao, F.; Chen, G.S.; Hulsey, J.L. Monitoring Bridge Dynamic Responses Using Fiber Bragg Grating Tiltmeters. Sensors 2017, 17, 2390. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, M.; Lan, Y.; Zhao, Y.; Dai, W. Detection of Crack Locations in Aluminum Alloy Structures Using FBG Sensors. Sensors 2020, 20, 347. [Google Scholar] [CrossRef]
- Chuang, K.-C.; Liao, H.-T.; Ma, C.-C. Dynamic Sensing Performance of a Point-Wise Fiber Bragg Grating Displacement Measurement System Integrated in an Active Structural Control System. Sensors 2011, 11, 11605–11628. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, J. Model Study of the Influence of Ambient Temperature and Installation Types on Surface Temperature Measurement by Using a Fiber Bragg Grating Sensor. Sensors 2016, 16, 975. [Google Scholar] [CrossRef]
- Yao, K.; Lin, Q.; Zhuangde, J.; Zhao, N.; Peng, G.; Tian, B.; Jia, W.; Yang, P. Design and Analysis of a Combined Strain-Vibration-Temperature Sensor with Two Fiber Bragg Gratings and a Trapezoidal Beam. Sensors 2019, 19, 3571. [Google Scholar] [CrossRef]
- Jiang, H.; Chen, J.; Liu, T. Wavelength Detection in Spectrally Overlapped FBG Sensor Network Using Extreme Learning Machine. IEEE Photonics Technol. Lett. 2014, 26, 2031–2034. [Google Scholar] [CrossRef]
- Fernandez-Vallejo, M.; Olier, D.; Zornoza, A.; Perez-Herrera, R.A.; Diaz, S.; Elosúa, C.; Bariain, C.; Loayssa, A.; Lopez-Amo, M. 46-km-Long Raman Amplified Hybrid Double-Bus Network With Point and Distributed Brillouin Sensors. IEEE Sens. J. 2011, 12, 184–188. [Google Scholar] [CrossRef]
- Wen, X.; Shuai, H.; Zhu, F.; Zhang, D. Fiber Bragg gratings sensing network with a bus chain typology structure. Opt. Eng. 2016, 55, 66102. [Google Scholar] [CrossRef]
- Li, D.; Wang, H.; Li, Z. Accurate and Fast Wavelength Demodulation for Fbg Reflected Spectrum Using Multilayer Perceptron (Mlp) Neural Network. In Proceedings of the 2020 12th International Conference on Measuring Technology and Mechatronics Automation (ICMTMA), Phuket, Thailand, 28–29 February 2020; pp. 265–268. [Google Scholar]
- Peng, P.-C.; Lin, J.-H.; Tseng, H.-Y.; Chi, S. Intensity and Wavelength-Division Multiplexing FBG Sensor System Using a Tunable Multiport Fiber Ring Laser. IEEE Photonicsd Technol. Lett. 2004, 16, 230–232. [Google Scholar] [CrossRef]
- Yeh, C.H.; Tsai, N.; Zhuang, Y.-H. Capacity and capability enhancements of FBG sensor system by utilizing intensity and WDM detection technique Related content Smart architecture for stable multipoint fiber Bragg grating sensor system. Smart Mater. Struct. 2017, 26, 1–5. [Google Scholar] [CrossRef]
- Manie, Y.C.; Shiu, R.-K.; Peng, P.-C.; Guo, B.-Y.; Bitew, M.A.; Tang, W.-C.; Lu, H.-K. Intensity and Wavelength Division Multiplexing FBG Sensor System Using a Raman Amplifier and Extreme Learning Machine. J. Sens. 2018, 2018, 1–11. [Google Scholar] [CrossRef]
- Manie, Y.C.; Li, J.-W.; Peng, P.-C.; Shiu, R.-K.; Chen, Y.-Y.; Hsu, Y.-T. Using a Machine Learning Algorithm Integrated with Data De-Noising Techniques to Optimize the Multipoint Sensor Network. Sensors 2020, 20, 1070. [Google Scholar] [CrossRef]
- Nair, L.A.; Lakshmy, G.B. Performance Analysis of Bus Topology in Fiber Optic Communication. Int. J. Comput. Eng. Res. 2015, 5, 51–55. [Google Scholar]
- Shi, C.; Chan, C.C.; Jin, W.; Liao, Y.; Zhou, Y.; Demokan, M. Improving the performance of a FBG sensor network using a genetic algorithm. Sens. Actuators A Phys. 2003, 107, 57–61. [Google Scholar] [CrossRef]
- Liu, D.; Tang, K.; Yang, Z.; Liu, D. A Fiber Bragg Grating Sensor Network Using an Improved Differential Evolution Algorithm. IEEE Photonics Technol. Lett. 2011, 23, 1385–1387. [Google Scholar] [CrossRef]
- Jiang, H.; Chen, J.; Liu, T.; Huang, W. A novel wavelength detection technique of overlapping spectra in the serial WDM FBG sensor network. Sens. Actuators A Phys. 2013, 198, 31–34. [Google Scholar] [CrossRef]
- Ding, H.; Wu, X.-N.; Liang, J.-Q.; Li, X.-L. Application of PSO algorithm in wavelength detection of FBG sensors. Spectrosc. Spectr. Anal. 2010, 30, 563–566. [Google Scholar]
- Qi, Y.; Li, C.; Jiang, P.; Jia, C.; Liu, Y.; Zhang, Q. Research on demodulation of FBGs sensor network based on PSO-SA algorithm. Optik 2018, 164, 647–653. [Google Scholar] [CrossRef]
- Zhou, Q.-X.; Jiang, H.; Lin, Y.-T.; Chen, J. Application of Distributed Estimation Algorithm in Wavelength Demodulation of Overlapping Spectra of Fiber Bragg Grating Sensor Networks. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 6320–6324. [Google Scholar]
- Chen, J.; Jiang, H.; Liu, T.; Fu, X. Wavelength detection in FBG sensor networks using least squares support vector regression. J. Opt. 2014, 16, 1–6. [Google Scholar] [CrossRef]
- Jiang, H.; Zeng, Q.; Chen, J.; Qiu, X.; Liu, X.; Chen, Z.; Miao, X. Wavelength detection of model-sharing fiber Bragg grating sensor networks using long short-term memory neural network. Opt. Express 2019, 27, 20583–20596. [Google Scholar] [CrossRef]
- Li, B.; Tan, Z.-W.; Shum, P.P.; Hu, D.J.J.; Wang, C.; Zheng, Y.; Shuhui, L. Robust Convolutional Neural Network Model for Wavelength Detection in Overlapping Fiber Bragg Grating Sensor Network. In Proceedings of the 2020 Optical Fiber Communications Conference and Exhibition (OFC), San Diego, CA, USA, 8–12 March 2020. [Google Scholar]
- Jia, Z.; Ren, L.; Li, H.-N.; Sun, W. Pipeline Leak Localization Based on FBG Hoop Strain Sensors Combined with BP Neural Network. Appl. Sci. 2018, 8, 146. [Google Scholar] [CrossRef]
- Djurhuus, M.S.E.; Schmauss, B.; Clausen, A.T.; Zibar, D. Simultaneous Temperature Estimation of Multiple Gratings Using a Multi-Layer Neural Network. IEEE Photonics Technol. Lett. 2020, 32, 1257–1260. [Google Scholar] [CrossRef]
- Chung, J.; Gulcehre, C.; Cho, K.; Bengio, Y. Empirical evaluation of gated recurrent neural networks on sequence modeling. arXiv 2014, arXiv:1412.3555. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenarios or Cases | Number of FBG Sensors | Number of Strain Steps | λ1 Wavelength Shift Value |
|---|---|---|---|
| 1 (Experimental setup) | 3 | 26 | 1545 nm–1545.75 nm |
| 2 | 5 | 45 | 1545 nm–1546.3 nm |
| 3 | 7 | 51 | 1545 nm–1546.5 nm |
| 4 | 10 | 63 | 1545 nm–1546.9 nm |
| St. S. | Actual Wavelength Values | Predicted Wavelength Values | RMSE/pm | Test Time/s | ||||
|---|---|---|---|---|---|---|---|---|
| 1 | 1545 | 1545.32 | 1545.642 | 1545.03 | 1545.322 | 1545.643 | 0.042 | 0.439 |
| 6 | 1545.277 | 1545.32 | 1545.642 | 1545.35 | 1545.33 | 1545.644 | 0.04 | 0.432 |
| 11 | 1545.5 | 1545.32 | 1545.642 | 1545.533 | 1545.34 | 1545.643 | 0.04 | 0.437 |
| 15 | 1545.685 | 1545.32 | 1545.642 | 1545.693 | 1545.34 | 1545.643 | 0.04 | 0.437 |
| 23 | 1545.725 | 1545.32 | 1545.642 | 1545.743 | 1545.31 | 1545.643 | 0.041 | 0.438 |
| St. S. | Actual Wavelength Values | Predicted Wavelength Values | RMSE/ pm | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 22 | 1545.81 | 1545.3 | 1545.6 | 1545.9 | 1546.2 | 1545.86 | 1545.32 | 1545.62 | 1545.94 | 1546.21 | 0.05 |
| 28 | 1545.99 | 1545.3 | 1545.6 | 1545.9 | 1546.2 | 1546 | 1545.4 | 1545.65 | 1545.91 | 1546.21 | 0.04 |
| 32 | 1546.11 | 1545.3 | 1545.6 | 1545.9 | 1546.2 | 1546.15 | 1545.5 | 1545.61 | 1545.92 | 1546.21 | 0.04 |
| 35 | 1546.2 | 1545.3 | 1545.6 | 1545.9 | 1546.2 | 1546.23 | 1545.33 | 1545.61 | 1545.91 | 1546.22 | 0.04 |
| 38 | 1546.29 | 1545.3 | 1545.6 | 1545.9 | 1546.2 | 1546.32 | 1545.4 | 1545.65 | 1545.91 | 1546.22 | 0.04 |
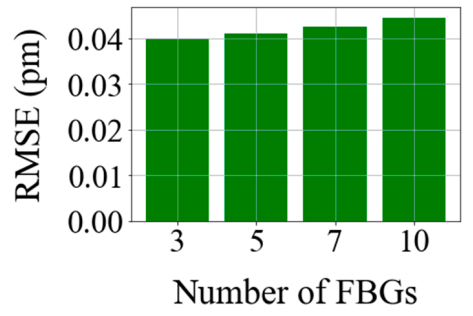
| Scenarios or Cases | Average RMSE (pm) | Average Testing Time (s) |
|---|---|---|
| 1 (Experimental setup) | 0.0411 | 0.437 |
| 2 | 0.0421 | 0.439 |
| 3 | 0.0432 | 0.441 |
| 4 | 0.0433 | 0.445 |
| Method | RMSE (pm) | Testing Time (S) | Data Source |
|---|---|---|---|
| GRU | 0.043 | 0.44 | This work |
| DE | <0.2 | Not Available | Reference [22] |
| ELM | 0.918 | 215 | Reference [11] |
| DE | <1 | 450 | Reference [21] |
| EDA | 3.0 | Not Available | Reference [25] |
| LS-SVR | 3.955 | 0.578 | Reference [26] |
| TS-DMS-PSO | 8.01 | 84.85 | Reference [23] |
| PSO-SA | 7.32 | Not Available | Reference [24] |
| GA | 301.82 | 1026.8 | Reference [20] |
| Scenarios or Cases | Comparison of the Three Models | |||||
|---|---|---|---|---|---|---|
| GRU | LSTM | MLP | ||||
| Average RMSE (pm) | Average Testing Time (s) | Average RMSE (pm) | Average Testing Time (s) | Average RMSE (pm) | Average Testing Time (s) | |
| 1 (Experimental setup) | 0.0411 | 0.437 | 0.075 | 0.52 | 0.081 | 0.9 |
| 2 | 0.0421 | 0.439 | 0.076 | 0.63 | 0.088 | 0.92 |
| 3 | 0.0432 | 0.441 | 0.088 | 0.75 | 0.099 | 1.9 |
| 4 | 0.0433 | 0.445 | 0.099 | 0.98 | 0.102 | 2.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dehnaw, A.M.; Manie, Y.C.; Chen, Y.Y.; Chiu, P.H.; Huang, H.W.; Chen, G.W.; Peng, P.C. Design Reliable Bus Structure Distributed Fiber Bragg Grating Sensor Network Using Gated Recurrent Unit Network. Sensors 2020, 20, 7355. https://doi.org/10.3390/s20247355
Dehnaw AM, Manie YC, Chen YY, Chiu PH, Huang HW, Chen GW, Peng PC. Design Reliable Bus Structure Distributed Fiber Bragg Grating Sensor Network Using Gated Recurrent Unit Network. Sensors. 2020; 20(24):7355. https://doi.org/10.3390/s20247355
Chicago/Turabian StyleDehnaw, Amare Mulatie, Yibeltal Chanie Manie, Ya Yu Chen, Po Han Chiu, Hung Wei Huang, Guan Wei Chen, and Peng Chun Peng. 2020. "Design Reliable Bus Structure Distributed Fiber Bragg Grating Sensor Network Using Gated Recurrent Unit Network" Sensors 20, no. 24: 7355. https://doi.org/10.3390/s20247355
APA StyleDehnaw, A. M., Manie, Y. C., Chen, Y. Y., Chiu, P. H., Huang, H. W., Chen, G. W., & Peng, P. C. (2020). Design Reliable Bus Structure Distributed Fiber Bragg Grating Sensor Network Using Gated Recurrent Unit Network. Sensors, 20(24), 7355. https://doi.org/10.3390/s20247355