3.2. Fingerprint Database and Eight-Direction Index
Most of the localization methods based on RSS share the same fundamentals. The indoor map drawing and Bluetooth beacon placement must be completed first to build the indoor localization environment. Then, the fingerprint database can be created, and the RSS distributions of all the Bluetooth beacons need to be stored at all the reference points (RPs). In the indoor map, space is usually divided into 1 m * 1 m grids [
38], and the center point of each grid is regarded as the reference point. The RSS value has a strong fluctuation due to the multipath propagation of signals reflected in walls, rooms, and floors. Therefore, in fingerprint data collection, the weakest RSS observations of a reference point need to be abandoned, and the remainder of RSS observations should take the average as the RSS measurement to reduce these influences. In traditional fingerprint database construction, the expected format is as shown in
Table 2. The coordinates of each reference point and the corresponding RSS collected are stored.
In the process of fingerprint data matching, the computation is costly when the data of every reference point in the database participate in the matching calculation. Large-scale positioning regions must localize the positioning model into a sub-region by location clustering [
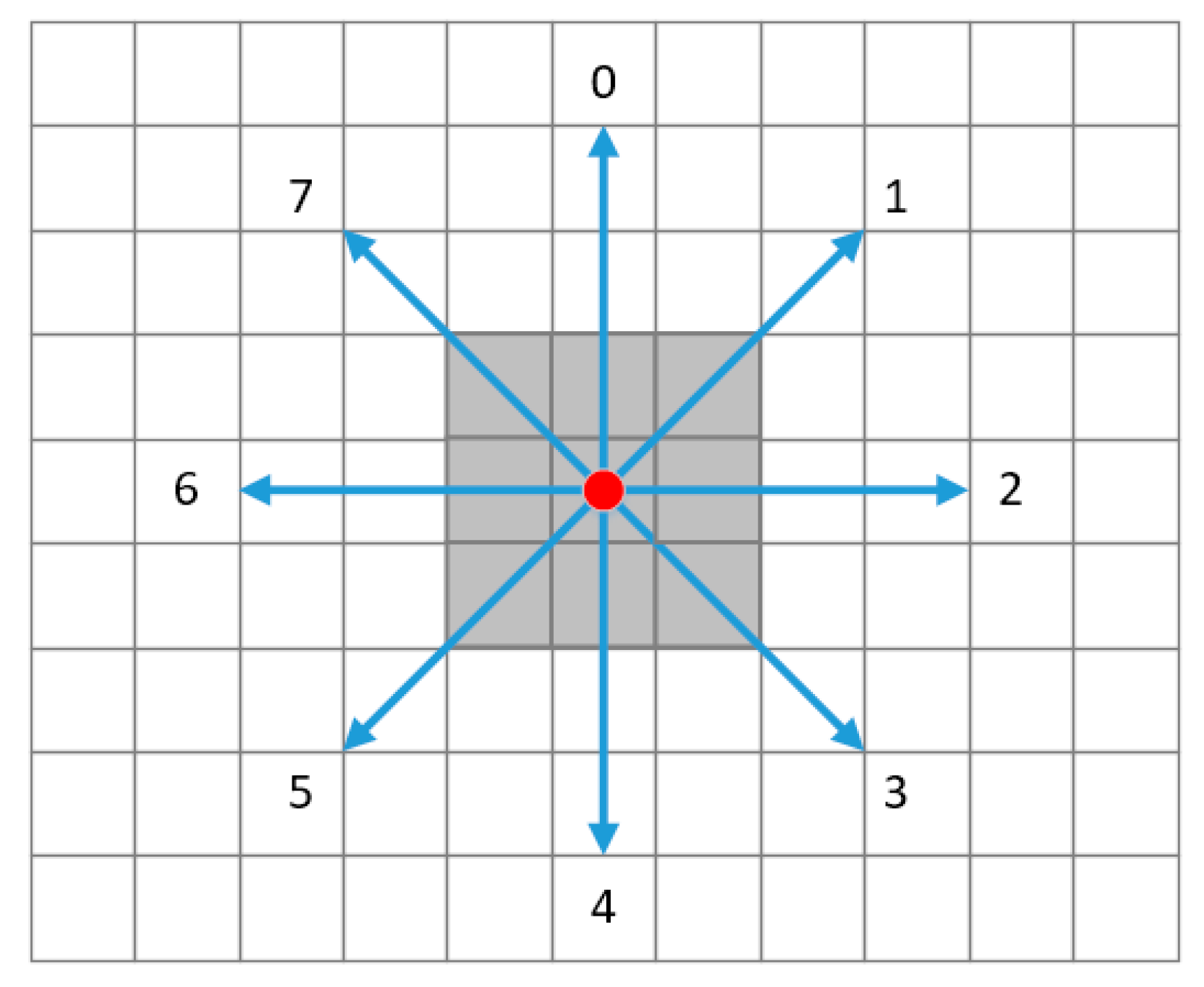
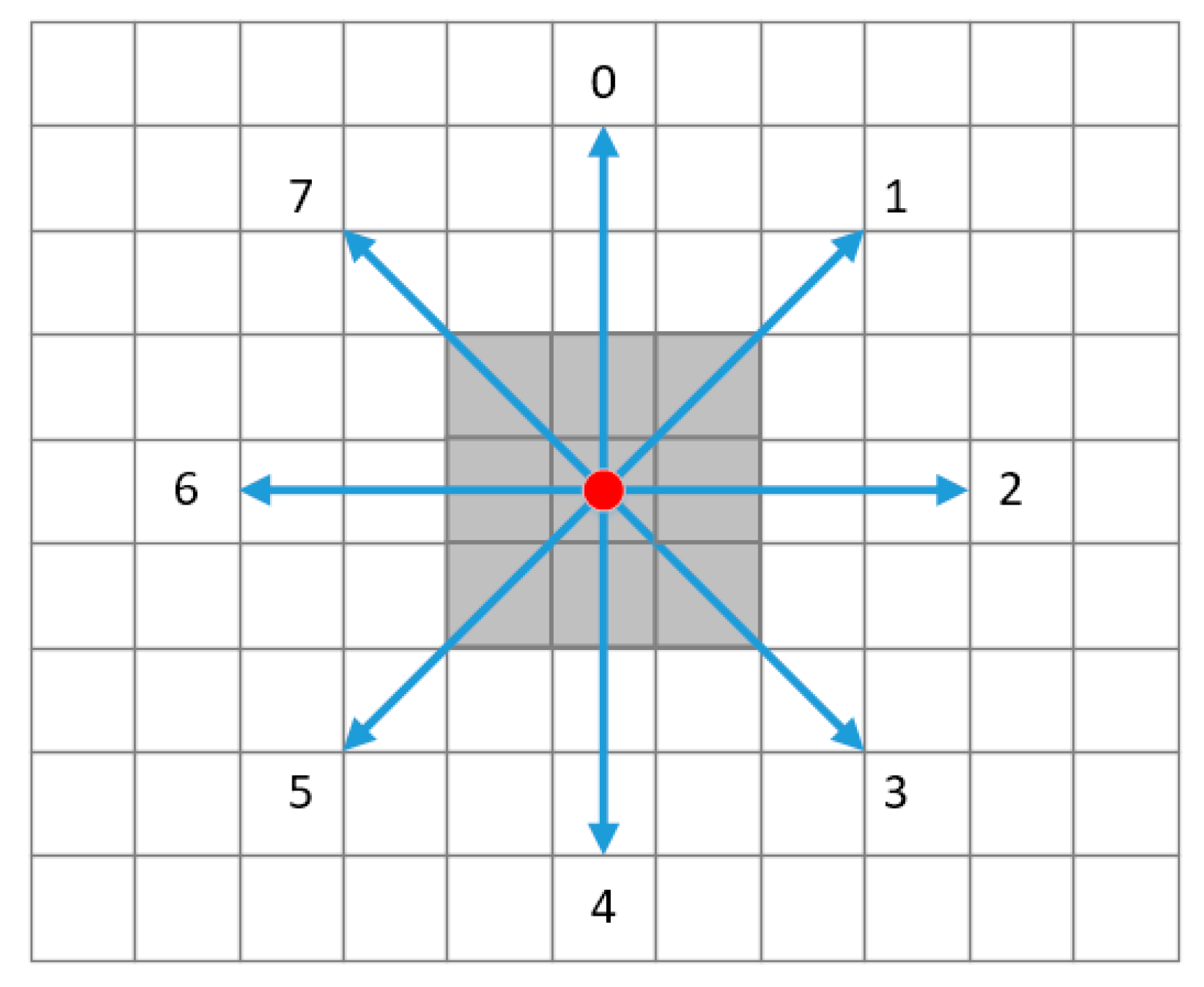
20]. K-means clustering and support vector classifier methods are used in much research to reduce the computation costs. In this paper, an efficient method for fingerprint data retrieval is proposed, based on spatial proximity. An eight-direction index is constructed during the fingerprint database construction to build the next dynamic fingerprint window to find suitable reference points quickly. The eight-direction index of the fingerprint database is shown in
Figure 2. When collecting the Bluetooth signal of a reference point, the reference points in the surrounding eight directions need to be collected, and the relationship needs to be recorded.
The storage format of the fingerprint database based on the eight-direction index is shown in
Table 3. Compared with the traditional fingerprint database structure, the NearRP field is added, and the adjacent reference points are stored. The value of the direction_id ranges from 0 to 7. Thereby, all the reference points are connected through the eight-direction index, convenient for searching the required fingerprint data quickly in real-time positioning.
3.3. Dynamic Fingerprint Window
In the traditional fingerprint positioning method, the RSS value received in real time is generally matched with each reference point’s RSS collection in the fingerprint database. However, this method requires many matching calculations, and irrelevant fingerprints interfere with the location estimation. In fact, only the fingerprint data within the maximum range of the user’s movement in the positioning period are needed to perform the matching calculation. The maximum range of the user’s movement is the proposed dynamic fingerprint window in this article, and it can always cover the space that the user can reach during a positioning period. Compared with the fingerprint clustering range proposed from the perspective of signal distribution in the related literature, the dynamic fingerprint window starts from indoor pedestrian movement, which is more scientific and reasonable.
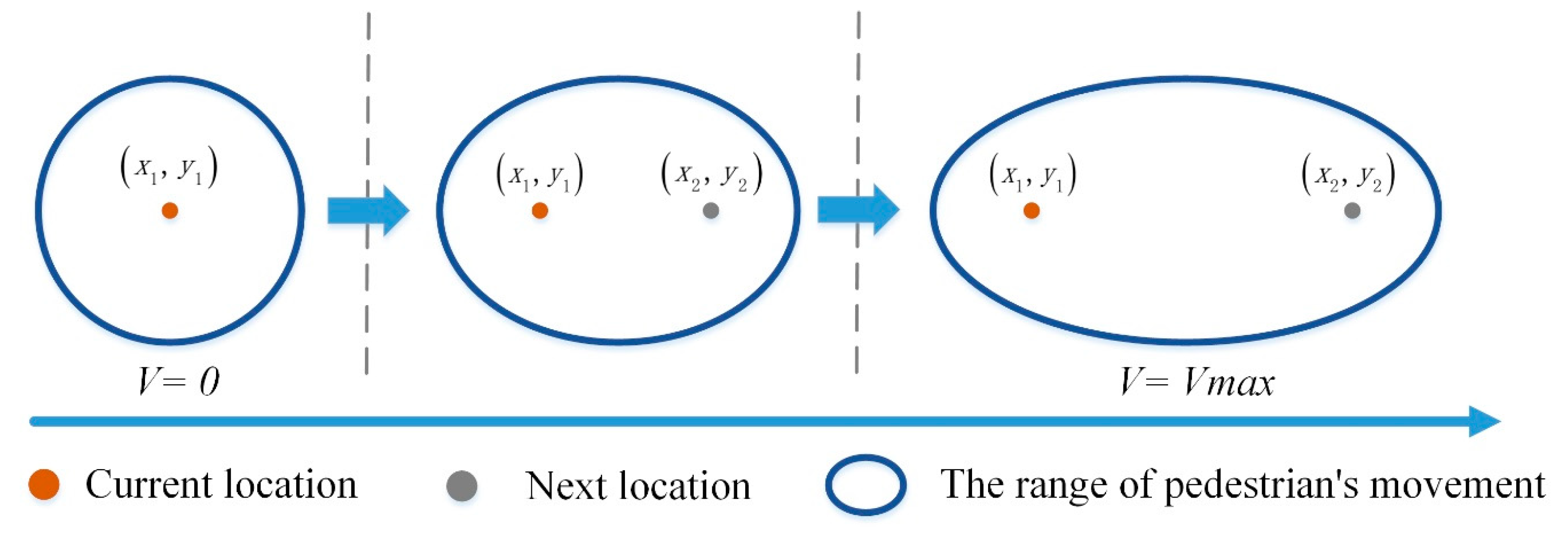
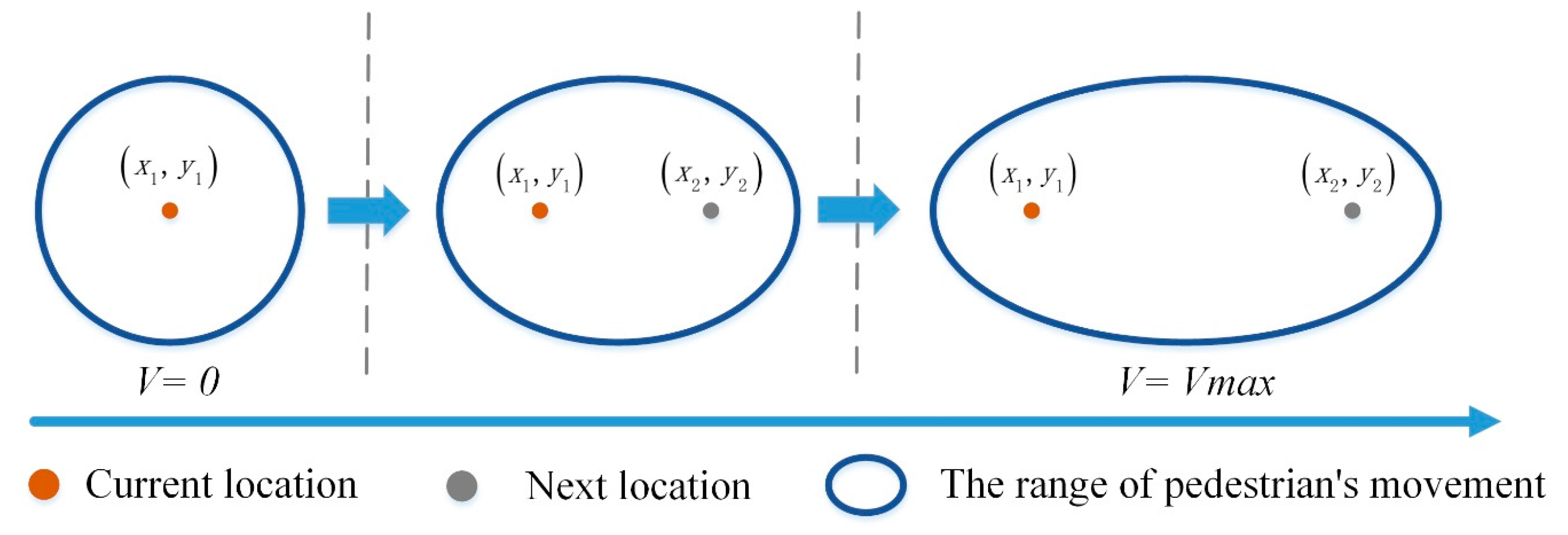
Pedestrians are in different motion states in indoor positioning, such as stationary, slow walking, fast walking, and running. The range and form of the dynamic fingerprint window should be different, as shown in
Figure 3. In an ideal barrier-free indoor space, the range of pedestrian movement in a positioning period should be a standard circle when the pedestrian is at a standstill, and movement may occur in all directions. When the pedestrian’s speed is not 0, the range of movement can be an ellipse, and the direction of the semi-major axis in the ellipse is consistent with the direction of the pedestrian movement. As the speed increases, the short half axis of the ellipse becomes smaller, the semi-major axis becomes more prolonged, and the ellipse stretches in the direction of the pedestrian movement.
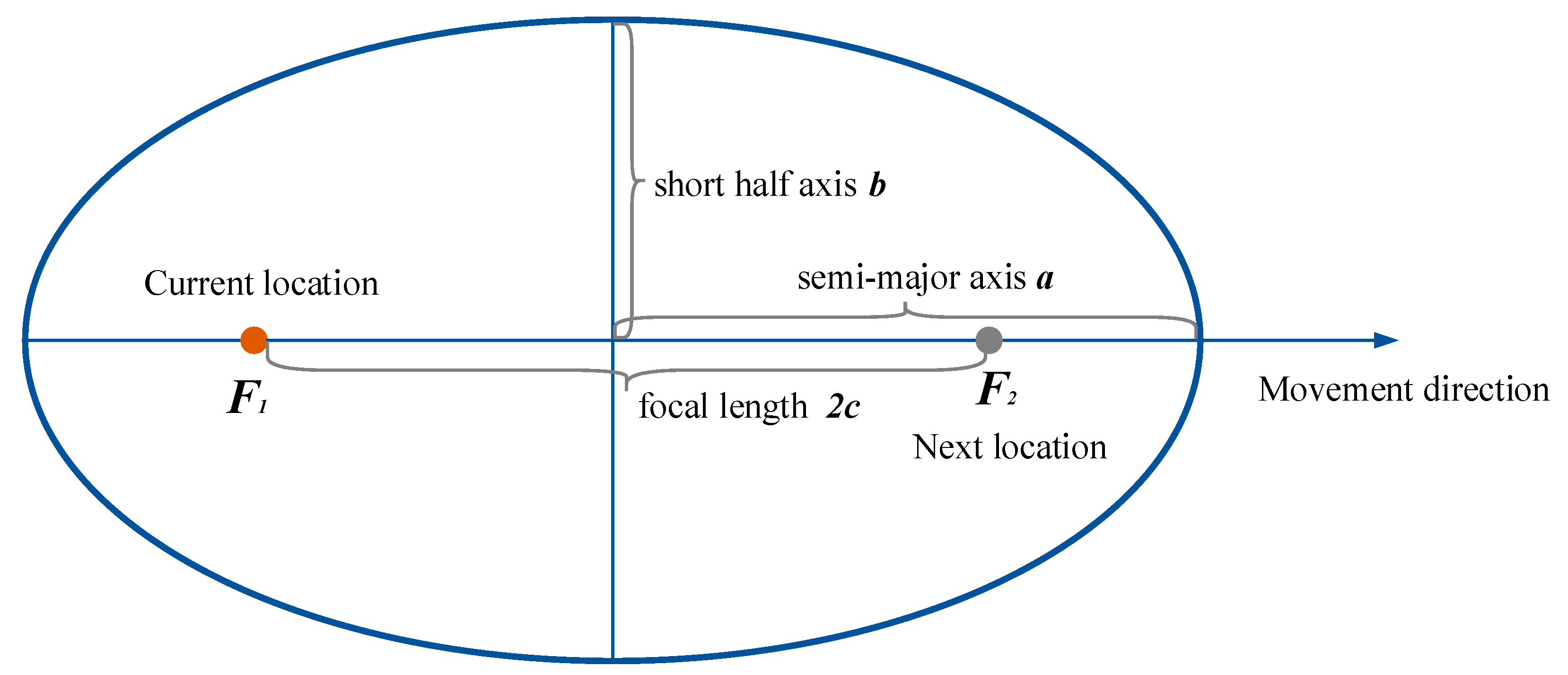
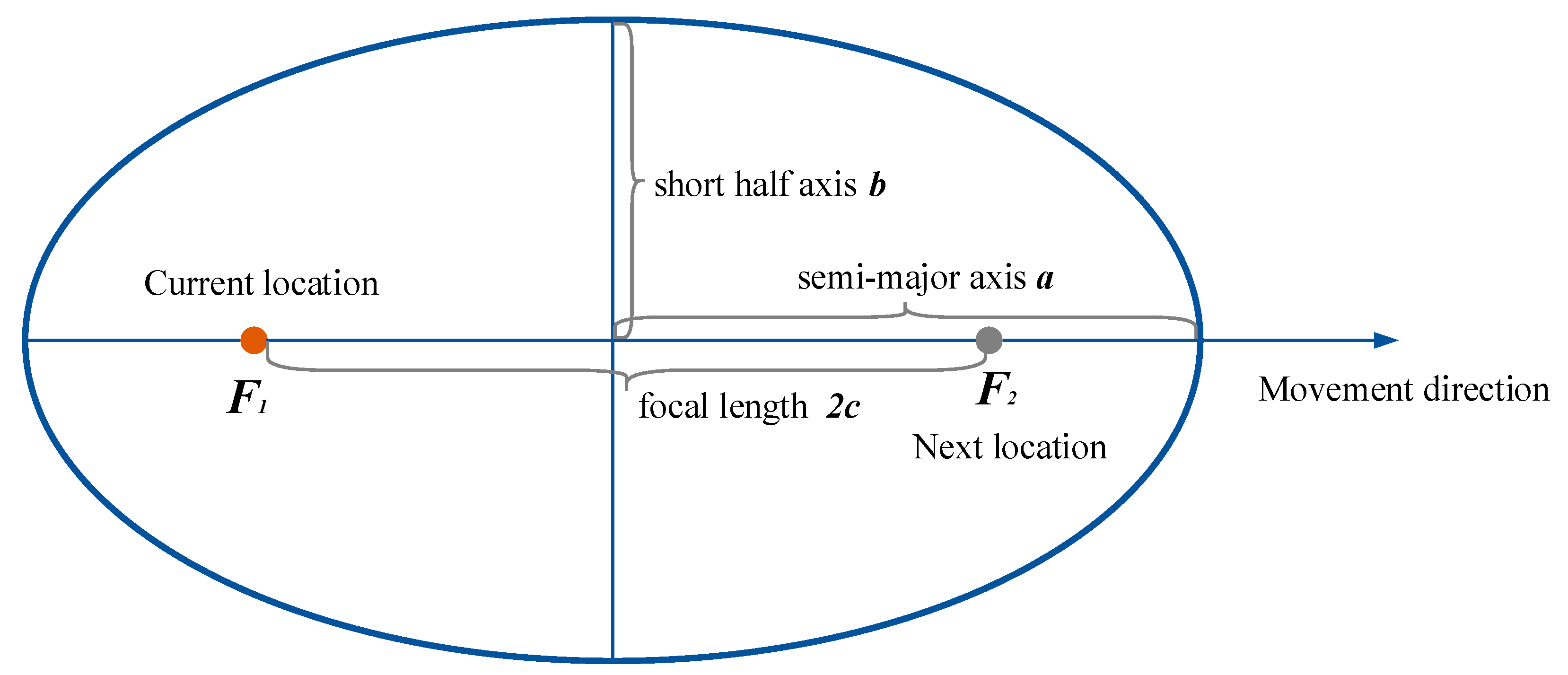
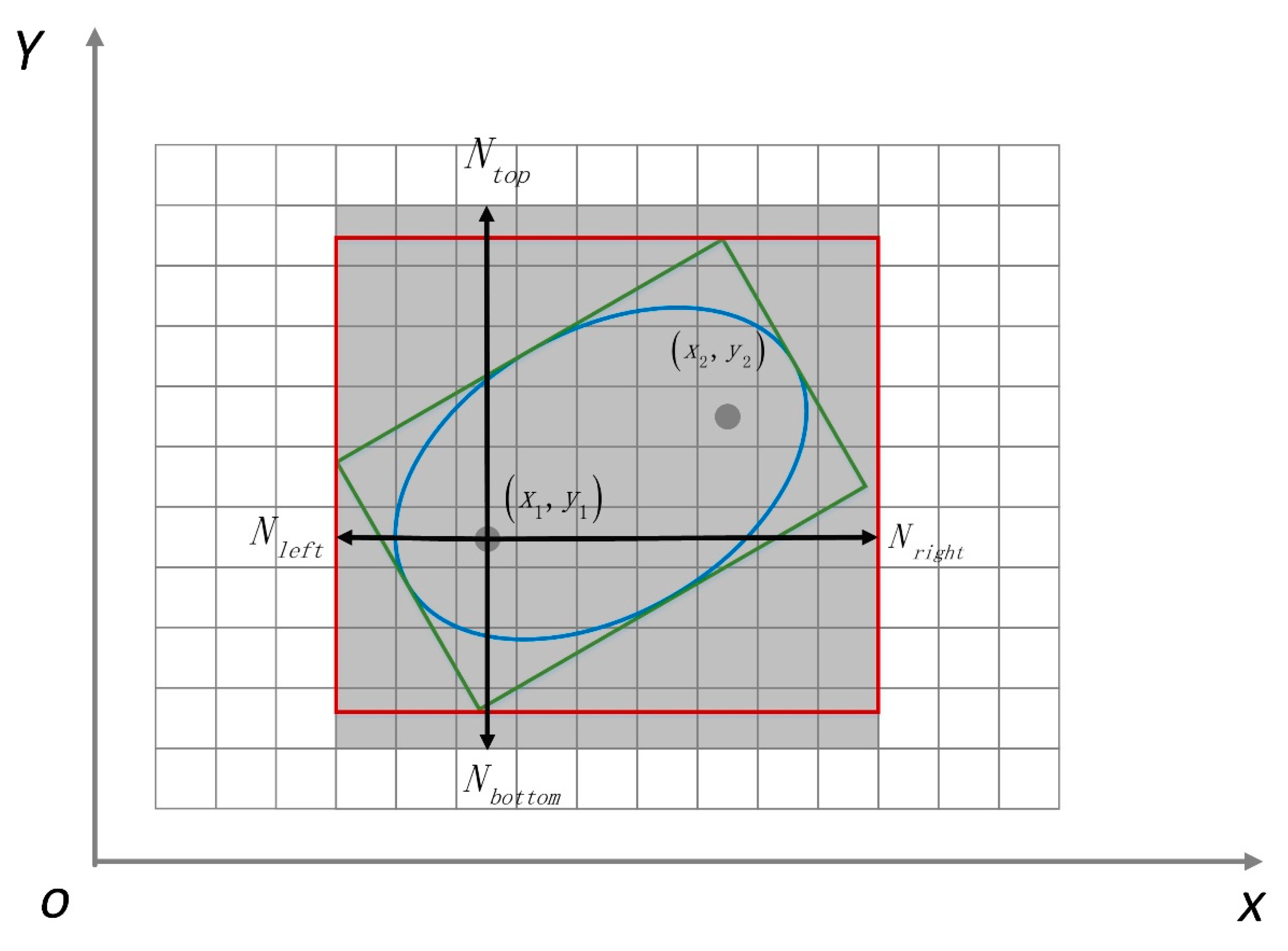
According to the above analysis, the range of pedestrian movement that is the dynamic fingerprint window can be described as an ellipse window, and the conceptual model is shown in
Figure 4. The two focal points of the ellipse are composed of the current position
and the next predicted position
. The X-axis is established based on the straight line of
, and the Y-axis is established based on the vertical line of
. The direction of the semi-major axis of the ellipse is the same as the predicted movement direction of the pedestrian. The range formed by the ellipse is the area in which pedestrians may appear in a positioning cycle. The next predicted position can be estimated from the sensor data recorded by the smartphone.
In order to determine the range of the ellipse window, the first step is to estimate the next predicted position and focal length of the ellipse. Although the predicted position needs to be calculated here, this is only a rough positioning estimation and cannot replace the final position calculation. According to the PDR algorithm, the acceleration sensor and orientation sensor data are collected by the inertial measurement unit in the smartphone, and the calculation of the next position and focal length L is based on the following formula:
where
indicates the coordinates of the next position,
are the known coordinates of the previous position,
d is the step length,
k is the step count, and
represents the heading angle. The step size estimation is not the focus of this article, and a fixed step size is generally used. After the focal length of the ellipse window is obtained, the parameter equation of the ellipse can be determined by calculating the short axis length
b.
As we know, the length of the short half axis in the ellipse window is related to the pedestrian’s speed. The greater the speed, the smaller the short half axis. When the pedestrian is stationary, the lengths of the semi-major axis and short half axis in the ellipse are equal, and the ellipse window becomes a standard circle; its radius should cover the range where the pedestrians appear farthest. At this time, the calculation formula for the length in the short half axis is as follows:
where
represents the maximum speed value of the pedestrian in the indoor environment. According to Chandra’s research [
39], indoor pedestrians’ maximum walking speeds do not exceed 3 m/s. Therefore,
is set to 3 m/s in this paper,
T is the positioning period, and
error is the general empirical error of Bluetooth fingerprint positioning, which is set to 3 m.
When the speed of pedestrians increases and exceeds , the length of the short half axis in the ellipse window would become very small, but there must be a minimum value. The general empirical error of Bluetooth fingerprint positioning can be used as the minimum length of the short half axis in the ellipse window, and the length of the short half axis should be within the interval of .
When the speed of pedestrians
V is within
, the length of the short half axis in the ellipse window is inversely proportional to the speed. At this time, the value of
b is calculated as follows:
Among them, the speed can be calculated by . Therefore, when the previous position is known, the PDR algorithm can be used to estimate the parameters c and a in the ellipse equation, and the range of the ellipse window can be finally determined.
However, the ellipse window is composed of arcs, and its range is irregular, which is not conducive to quickly determining which grids are within the ellipse window unless every reference point is involved in the calculation of the ellipse equation. Therefore, after calculating the ellipse window’s parameters, the window needs to be combined with the indoor spatial grid to simplify the search algorithm to find the fingerprint data to be matched as soon as possible. This paper proposes converting the ellipse window into a rectangular window parallel to the grid direction so that the space range of the required fingerprint data can be quickly determined in the real-time positioning process. The shape conversion of the dynamic fingerprint window is shown in
Figure 5. The circumscribed rectangle of the ellipse window is firstly generated, but the circumscribed rectangle is not parallel to the coordinate axis. It is inconvenient to quickly obtain fingerprint data during retrieval, so the secondary circumscribed rectangle is generated based on the original circumscribed rectangle. The RSS collection in the reference points within the secondary circumscribed rectangle is the fingerprint dataset that is needed to perform the matching calculation.
Assuming that the current position of the pedestrian is
and the coordinates are
, the length of the semi-major axis
a, the length of the short half axis
b, and the focal length
2c can be quickly calculated based on the above calculation method for the ellipse window. At this moment, the current position of the pedestrian is regarded as the center point; the range of the fingerprint dataset that is needed to perform the matching calculation is in the following:
where
,
,
, and
are the numbers of grids that need to be displaced to the left, right, down, and up above the current position. The cell size represents the grid size of the indoor positioning environment, and α is the angle between the semi-major axis of the ellipse and the horizontal grid, which is calculated from the point
and point
. Under the condition that the number of grid points
is known, the fingerprint dataset covered by the dynamic fingerprint window that is the displacement range in the four directions can be quickly selected from the database through the established eight-direction index. The pseudocode of Algorithm 1 that represents the calculation process for a dynamic fingerprint window is listed below.
| Algorithm 1: the proposed dynamic fingerprint window calculation algorithm |
| Input: current location , positioning cycle T, and cell size cz; |
| step count N and heading angle ; |
| Define error = 3, = 3; |
| 1. calculate the next predicted position and focal length L; |
| 2. c = L/2; |
| 3. V = L/T; |
| 4. ifV != 0 |
| 5. ; |
| 6. else |
| 7. ; |
| 8. ; |
| 9. /* The parameters of the ellipse equation have been calculated*/ |
| 10. convert the ellipse window to the secondary circumscribed rectangle; |
| 11. calculate the displacement range [, ,,]; |
| Output: the displacement range [, ,,]; |
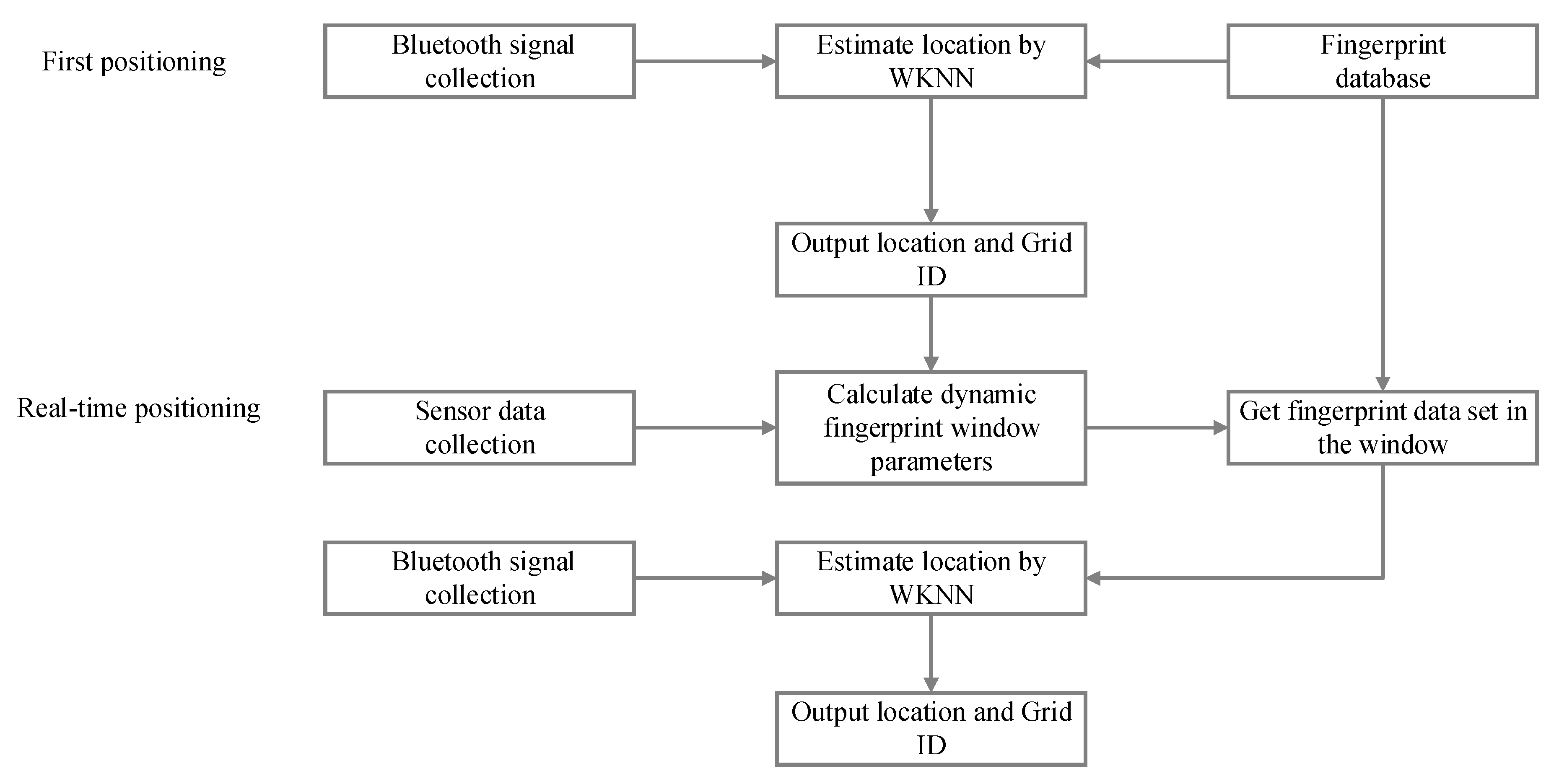
3.4. DFW-WKNN Positioning Method
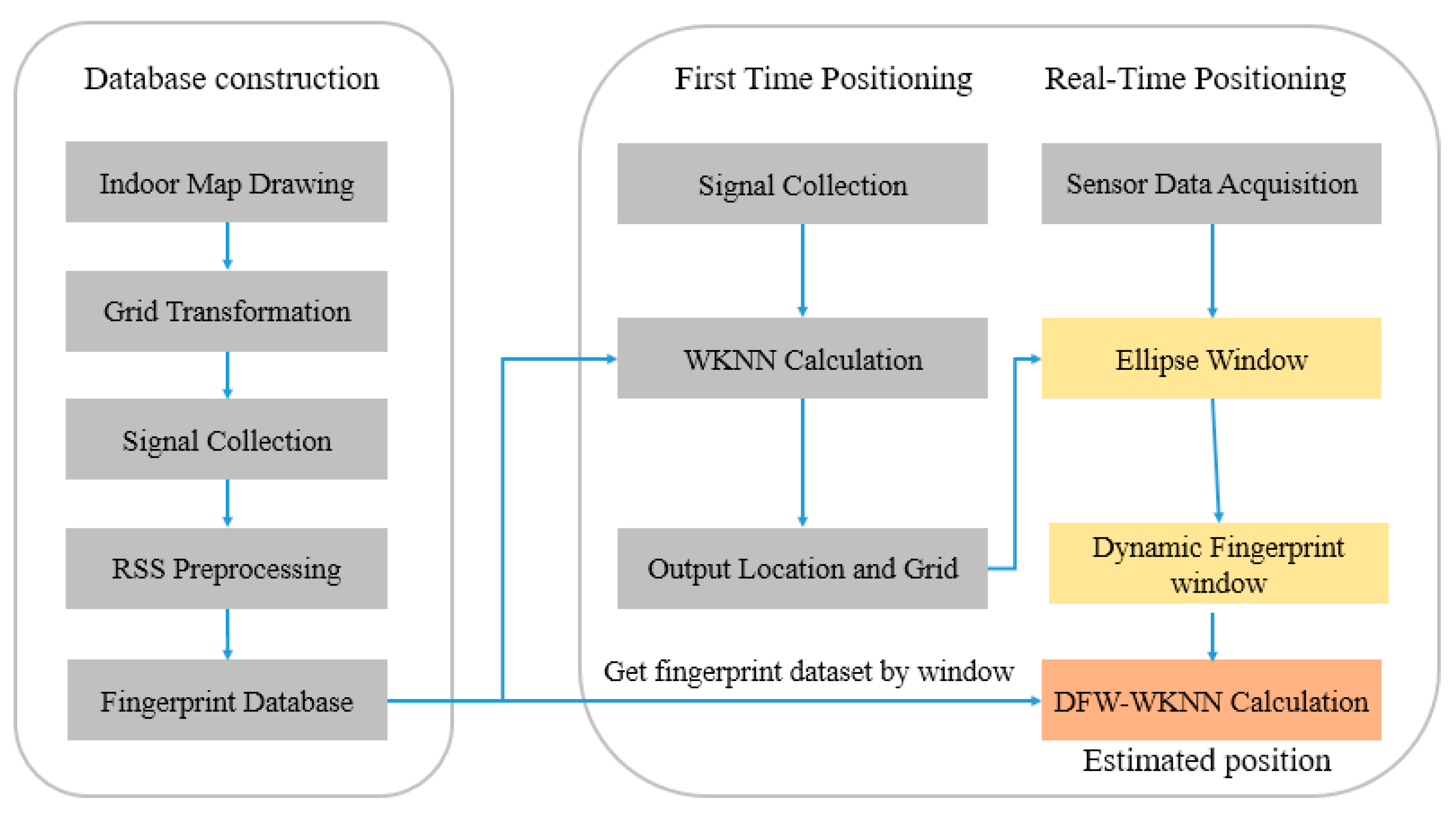
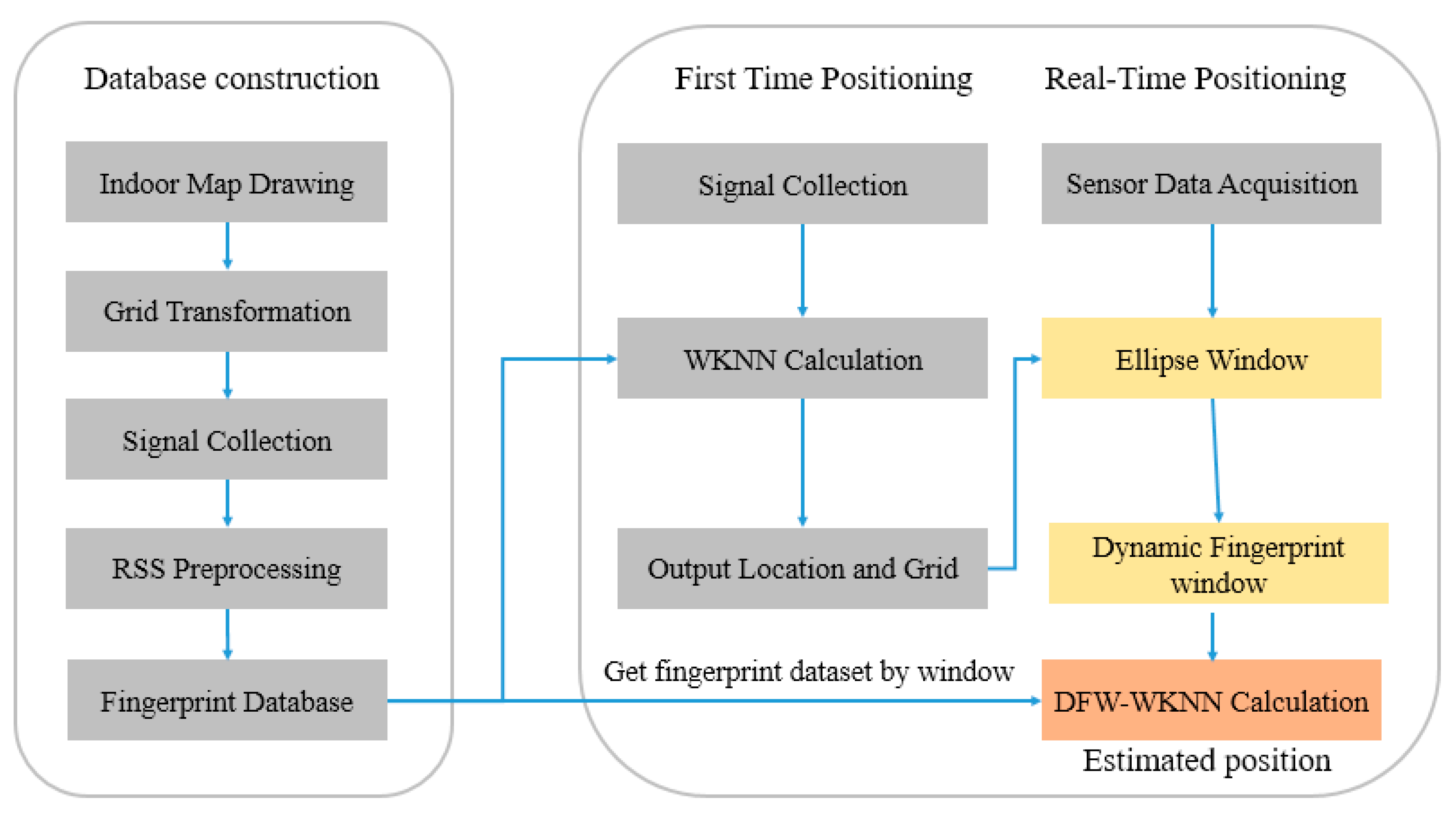
The indoor positioning algorithm based on the dynamic fingerprint window includes two parts: the first-time positioning and real-time positioning. The flow chart of the algorithm is shown in
Figure 6. After the fingerprint database construction, the traditional WKNN positioning method is used for the first-time positioning to obtain the output location and Grid ID. Then, the inertial sensors’ data are collected, and the dynamic fingerprint window is calculated when the data are combined with the former location. Finally, the accurate location is estimated by selecting the appropriate fingerprint dataset under the constraint of the dynamic fingerprint window.
In the first-time positioning stage, the grid number where the positioning result is located is recorded as a priori knowledge and provided for real-time positioning to improve efficiency. Since the current location must be known before calculating the range of the dynamic fingerprint windows, the initial position must be determined first. The traditional WKNN positioning result, outdoor GPS position, or input determined position can be used to achieve the initial position. The higher the accuracy of the first positioning, the better the result in real-time positioning.
In the real-time positioning stage, the dynamic fingerprint window range can be calculated when firstly combining the grid number in the first positioning result. Then, the corresponding fingerprint dataset in the database can be selected quickly based on the eight-direction index. Finally, the obtained RSS collection from an unknown location matches the selected fingerprint dataset to realize real-time position estimation. The specific steps in the real-time positioning stage are as follows:
Step1: According to the accelerometer data received by the inertial measurement unit of the smartphone, the number of steps within the positioning period T is estimated based on the wave peak detection algorithm.
Step2: Set a fixed experience value as the average step length and combine it with the number of steps and the last positioning result to estimate the parameters a, b, and c of the ellipse window.
Step3: Calculate the range of the dynamic fingerprint window based on the ellipse window parameters and grid size, which contains the number of grids that need to be displaced from the up, down, left, and right directions at the current position.
Step4: With the support of the eight-direction index, select the fingerprint dataset from the fingerprint database based on the range of the dynamic fingerprint window .
Step5: Obtain the signal data
at the current position, match the signal data with the selected fingerprint dataset
one by one, and calculate the similarity between
and
using the Euclidean distance, using the following formula:
Step6: Sort the calculated
by descending, select the top K grids with the smallest similarity between their fingerprint data and the current signal data, and calculate the weight of each grid, using the following formula:
Step7: The coordinates corresponding to the K grids are weighted and averaged as the final positioning coordinates, and the coordinates
and the number of grids that
located are output. The positioning calculation uses the following formula:
where
represents the coordinates of the selected top
K grids.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}