Combined Regularized Discriminant Analysis and Swarm Intelligence Techniques for Gait Recognition



Abstract
1. Introduction
- proposing a combination of regularized discriminant analysis and particle swarm optimization for gait recognition,
- proposing a combination of regularized discriminant analysis and grey wolf optimization,
- proposing a combination of regularized discriminant analysis and whale optimization algorithm,
- comparing and improving the results obtained in the paper [21].
2. Material and Methods
2.1. Gait Dataset
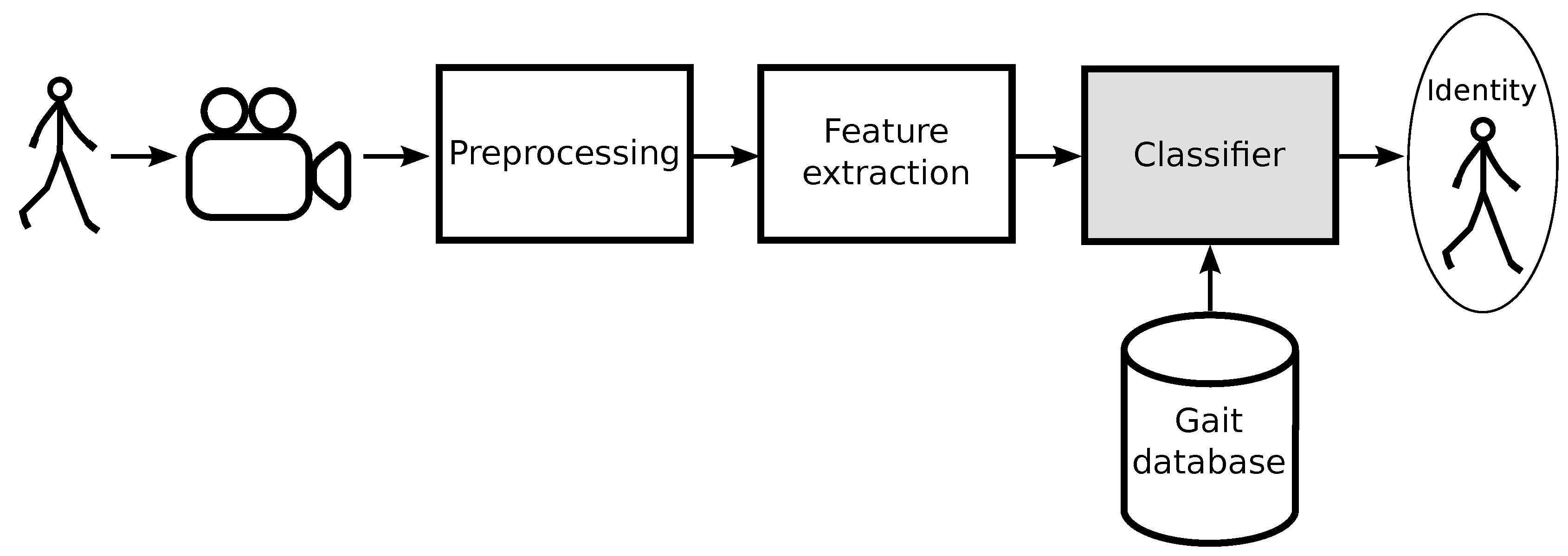
2.2. Gait Recognition System
2.3. Building Classification Model for Gait Recognition
2.4. Regularized Discriminant Analysis
- dimensionality reduction and feature extraction before classification,
- a linear classifier (considered in this paper).
2.5. Particle Swarm Optimization
2.6. Grey Wolf Optimization
2.6.1. Encircling Prey
2.6.2. Hunting
2.6.3. Attacking Prey (Exploitation) and Search for Prey (Exploration)
2.7. Whale Optimization Algorithm
2.7.1. Encircling Prey
2.7.2. Bubble-Net Attacking (Exploitation Phase)
2.7.3. Search for Prey (Exploration Phase)
2.8. Integration of Swarm Intelligence Techniques with Regularized Discriminant Analysis
- — the observation weights,
- — the linear coefficient threshold,
- — the parameter for regularizing the covariance matrix of the predictors,
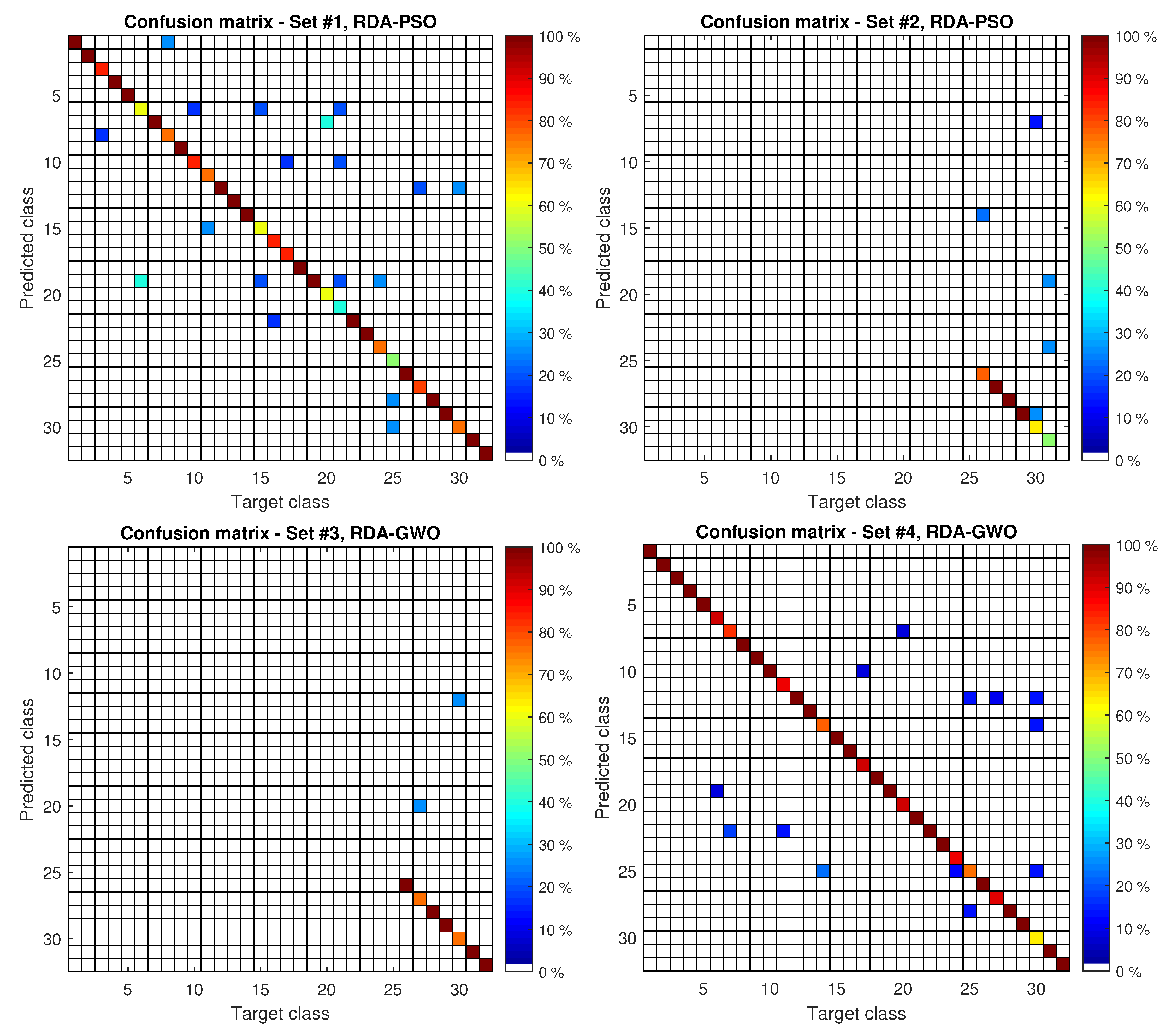
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Jain, A.K.; Flynn, P.; Ross, A.A. Handbook of Biometrics; Springer US: Boston, MA, USA, 2008. [Google Scholar] [CrossRef]
- Matovski, D.S.; Nixon, M.S.; Mahmoodi, S.; Carter, J.N. The Effect of Time on Gait Recognition Performance. IEEE Trans. Inf. Forensics Secur. 2012, 7, 543–552. [Google Scholar] [CrossRef]
- Wan, C.; Wang, L.; Phoha, V.V. A survey on gait recognition. ACM Comput. Surv. 2018, 51. [Google Scholar] [CrossRef]
- Little, J.J.; Boyd, J.E. Recognizing People by Their Gait: The Shape of Motion. J. Comput. Vis. Res. 1998, 1, 1–33. [Google Scholar]
- Han, J.; Bhanu, B. Individual recognition using gait energy image. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 316–322. [Google Scholar] [CrossRef]
- Kusakunniran, W.; Wu, Q.; Zhang, J.; Li, H. Support vector regression for multi-view gait recognition based on local motion feature selection. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 974–981. [Google Scholar] [CrossRef]
- Li, X.; Chen, Y. Gait recognition based on structural Gait energy image. J. Comput. Inf. Syst. 2013, 9, 121–126. [Google Scholar]
- Mohan Kumar, H.P.; Nagendraswamy, H.S. LBP for gait recognition: A symbolic approach based on GEI plus RBL of GEI. In Proceedings of the 2014 International Conference on Electronics and Communication Systems (ICECS), Prague, Czech Republic, 2–4 April 2014; pp. 1–5. [Google Scholar]
- Wang, H.; Fan, Y.; Fang, B.; Dai, S. Generalized linear discriminant analysis based on euclidean norm for gait recognition. Int. J. Mach. Learn. Cybern. 2018. [Google Scholar] [CrossRef]
- Lishani, A.O.; Boubchir, L.; Khalifa, E.; Bouridane, A. Human gait recognition using GEI-based local multi-scale feature descriptors. Multimed. Tools Appl. 2019, 78, 5715–5730. [Google Scholar] [CrossRef]
- Chao, H.; He, Y.; Zhang, J.; Feng, J. GaitSet: Regarding gait as a set for cross-view gait recognition. In Proceedings of the 33rd AAAI Conference on Artificial Intelligence, Hilton Hawaiian Village, Honolulu, Hawaii, USA, 27 January–1 February 2019; pp. 8126–8133. [Google Scholar] [CrossRef]
- Guo, H.; Li, B.; Zhang, Y.; Zhang, Y.; Li, W.; Qiao, F.; Rong, X.; Zhou, S. Gait Recognition Based on the Feature Extraction of Gabor Filter and Linear Discriminant Analysis and Improved Local Coupled Extreme Learning Machine. Math. Probl. Eng. 2020, 2020. [Google Scholar] [CrossRef]
- BenAbdelkader, C.; Cutler, R.; Davis, L. Stride and cadence as a biometric in automatic person identification and verification. In Proceedings of the 5th IEEE International Conference on Automatic Face Gesture Recognition, FGR 2002, Washington, DC, USA, 21–21 May 2002; pp. 372–377. [Google Scholar] [CrossRef]
- Yam, C.Y.Y.; Nixon, M.S.; Carter, J.N. Automated person recognition by walking and running via model-based approaches. Pattern Recognit. 2004, 37, 1057–1072. [Google Scholar] [CrossRef]
- Bouchrika, I.; Nixon, M.S. Model-based feature extraction for gait analysis and recognition. Lect. Notes Comput. Sci. 2007, 4418 LNCS, 150–160. [Google Scholar] [CrossRef]
- Ng, H.; Ton, H.L.; Tan, W.H.; Yap, T.T.V.; Chong, P.F.; Abdullah, J. Human Identification Based on Extracted Gait Features. Int. J. New Comput. Archit. Their Appl. 2011, 1, 358–370. [Google Scholar]
- Ariyanto, G.; Nixon, M.S. Model-based 3D gait biometrics. In Proceedings of the International Joint Conference on Biometrics (IJCB), Washington, DC, USA, 11–13 October 2011; pp. 1–7. [Google Scholar] [CrossRef]
- Deng, M.; Wang, C.; Cheng, F.; Zeng, W. Fusion of spatial-temporal and kinematic features for gait recognition with deterministic learning. Pattern Recognit. 2017, 67, 186–200. [Google Scholar] [CrossRef]
- Switonski, A.; Krzeszowski, T.; Josinski, H.; Kwolek, B.; Wojciechowski, K. Gait recognition on the basis of markerless motion tracking and DTW transform. IET Biom. 2018, 7, 415–422. [Google Scholar] [CrossRef]
- Kumar, P.; Mukherjee, S.; Saini, R.; Kaushik, P.; Roy, P.P.; Dogra, D.P. Multimodal Gait Recognition with Inertial Sensor Data and Video Using Evolutionary Algorithm. IEEE Trans. Fuzzy Syst. 2019, 27, 956–965. [Google Scholar] [CrossRef]
- Kwolek, B.; Michalczuk, A.; Krzeszowski, T.; Switonski, A.; Josinski, H.; Wojciechowski, K. Calibrated and synchronized multi-view video and motion capture dataset for evaluation of gait recognition. Multimed. Tools Appl. 2019, 78, 32437–32465. [Google Scholar] [CrossRef]
- Liao, R.; Yu, S.; An, W.; Huang, Y. A model-based gait recognition method with body pose and human prior knowledge. Pattern Recognit. 2020, 98, 107069. [Google Scholar] [CrossRef]
- Balazia, M.; Sojka, P. Gait Recognition from Motion Capture Data. ACM Trans. Multimed. Comput. Commun. Appl. 2018, 14. [Google Scholar] [CrossRef]
- Castro, F.; Marín-Jiménez, M.; Mata, N.; Muñoz-Salinas, R. Fisher Motion Descriptor for Multiview Gait Recognition. Int. J. Pattern Recognit. Artif. Intell. 2017, 31, 1756002. [Google Scholar] [CrossRef]
- Kwolek, B.; Krzeszowski, T.; Gagalowicz, A.; Wojciechowski, K.; Josinski, H. Real-Time Multi-view Human Motion Tracking Using Particle Swarm Optimization with Resampling. In Articulated Motion and Deformable Objects; Perales, F.J., Fisher, R.B., Moeslund, T.B., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 92–101. [Google Scholar]
- Lu, H.; Plataniotis, K.N.; Venetsanopoulos, A.N. MPCA: Multilinear Principal Component Analysis of Tensor Objects. IEEE Trans. Neural Netw. 2008, 19, 18–39. [Google Scholar]
- Fisher, R.A. The use of multiple measurements in taxonomic problems. Ann. Eugen. 1936, 7, 179–188. [Google Scholar] [CrossRef]
- Rao, C.R. The Utilization of Multiple Measurements in Problems of Biological Classification. J. R. Stat. Soc. Ser. 1948, 10, 159–203. [Google Scholar] [CrossRef]
- Guo, Y.; Hastie, T.; Tibshirani, R. Regularized linear discriminant analysis and its application in microarrays. Biostatistics 2006, 8, 86–100. [Google Scholar] [CrossRef] [PubMed]
- MathWorks. In Statistics and Machine Learning Toolbox: User’s Guide; The MathWorks, Inc.: Natick, MA, USA, 2020.
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- MathWorks. Global Optimization Toolbox: User’s Guide; The MathWorks, Inc.: Natick, MA, USA, 2020. [Google Scholar]
- Bishop, C.M. Pattern Recognition and Machine Learning; Information Science and Statistics; Springer: Secaucus, NJ, USA, 2006. [Google Scholar]
- Platt, J. Sequential Minimal Optimization: A Fast Algorithm for Training Support Vector Machines; Technical Report MSR-TR-98-14; Microsoft: Albuquerque, NM, USA, 1998. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment | Subset | Classical Methods | Hybrid Methods |
|---|---|---|---|
| 1: Set #1 | train | 169 | 137 |
| validation | – | 32 | |
| test | 156 | 156 | |
| 2: Set #2 | train | 325 | 261 |
| validation | – | 64 | |
| test | 58 | 58 | |
| 3: Set #3 | train | 325 | 261 |
| validation | – | 64 | |
| test | 31 | 31 | |
| 4: Set #4 | train | 90% () | 80% () |
| validation | – | 10% () | |
| test | 10% () | 10% () |
| Experiment | kNN [21] | NB [21] | SMO [21] | MLP [21] | LDA | RDA-PSO | RDA-GWO | RDA-WOA |
|---|---|---|---|---|---|---|---|---|
| 1: Set #1 | 47.44 | 55.77 | 67.95 | 80.13 | 45.51 | 86.28 | 86.92 | |
| 2: Set #2 | 37.93 | 56.90 | 63.79 | 75.86 | 79.31 | 84.48 | 84.48 | |
| 3: Set #3 | 38.71 | 70.97 | 67.74 | 77.42 | 88.39 | |||
| 4: Set #4 | 56.92 | 79.69 | 84.31 | 89.85 | 91.99 | 95.07 | 95.09 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Krzeszowski, T.; Wiktorowicz, K. Combined Regularized Discriminant Analysis and Swarm Intelligence Techniques for Gait Recognition. Sensors 2020, 20, 6794. https://doi.org/10.3390/s20236794
Krzeszowski T, Wiktorowicz K. Combined Regularized Discriminant Analysis and Swarm Intelligence Techniques for Gait Recognition. Sensors. 2020; 20(23):6794. https://doi.org/10.3390/s20236794
Chicago/Turabian StyleKrzeszowski, Tomasz, and Krzysztof Wiktorowicz. 2020. "Combined Regularized Discriminant Analysis and Swarm Intelligence Techniques for Gait Recognition" Sensors 20, no. 23: 6794. https://doi.org/10.3390/s20236794
APA StyleKrzeszowski, T., & Wiktorowicz, K. (2020). Combined Regularized Discriminant Analysis and Swarm Intelligence Techniques for Gait Recognition. Sensors, 20(23), 6794. https://doi.org/10.3390/s20236794