1. Introduction
In recent years, the inclination towards optical and magnetic tracking-based wireless communication has increased in the fields of terrestrial, underwater, and space links due to its low power and provision of high data rates [
1,
2]. Considerable research has been carried out for space and terrestrial links, but less emphasis has been placed on underwater communication as it is a more tedious and challenging job compared to atmospheric links of communication [
3]. For efficient underwater communication, there are a certain number of issues. The major issue is the type of underwater environmental conditions, which range from shallow coastal water to deep-sea or oceans [
3]. Acoustic waves are commonly used for underwater communication whose performance is degraded by high losses in transmission and reception of signals, low bandwidth, high latency, and Doppler spread. All these drawbacks can cause temporal and spatial variation of the acoustic channel, which further limits the available bandwidth of the system [
4]. According to the real-time water communication data, the current underwater acoustic communication can support up to tens of kbps of data rate for long distances (in km) and up to some hundreds of kbps standard for short-range (few meters) [
5,
6]. Acoustic communication is categorized in different links.
Table 1 provides the typical bandwidth for different underwater acoustic communication links with various ranges [
7].
To achieve effective communication between underwater vehicles and sensors, a high data rate (up to few tens of Mbps) is required. Fiber optics or copper cables can be employed to get a high data rate, but they have several engineering and maintenance issues. Therefore, to overcome this problem a wireless link with a high data rate is an appropriate alternative. Two different wireless communication technologies, optical and magnetic tracking-based wireless communication techniques have been discussed in this paper. Based on the performance of optical and magnetic trackers, the hybrid version has also been proposed for better efficiency and low latency in communication. Optical tracking-based communication has an advantage of high bandwidth, but it can be severely affected by factors like dispersion, scattering, fluctuations in temperature, and beam steering. Moreover, the line of sight (LOS) is the prime necessity in optical tracking-based wireless communication. Due to these limitations, optical tracking based wireless communication is limited to short distances. However, optical trackers with blue-green sources and detectors are quite effective despite some limitations under seawater. Up to a few hundred meters, an optical tracker with blue-green sources is capable of providing underwater communication. A summary of different optical tracking with different power of Light emitting Diode (LED) and Laser is presented in
Table 2.
The other tracking-based wireless communication is electromagnetic (EM) technology to obtain a high data rate but for short-range communication. The data rate in electromagnetic tracking-based wireless communication depends upon the speed of electromagnetic waves which further depends on permeability (µ), permittivity (ε), conductivity (σ), and volume discharge density (ρ) which varies on the type of underwater conditions. Radio-frequency waves are highly attenuated by seawater, but electromagnetic tracking-based wireless communication is capable of providing an excellent communication link for a short range (up to 40–50 m) [
16,
17]. Tracking has many applications using different techniques [
18,
19]. The placement of transmitters for tracking can vary from different devices that can be drones or other Internet of Things (IoT) devices [
20]. The tracking can also be done through Unmanned Aerial Vehicles (UAV) to track the IoT devices [
21].
3. Optical Tracking-Based Model for Aquatic Wireless Communication
Optical tracking has many applications, which vary from the human body (head, arm, leg, etc.) tracking to object tracking. These applications are mainly associated with a non-aquatic environment (outside the sea or ocean) [
10]. In this work, the possibility of object tracking in the aquatic environment has been discussed.
Figure 1 shows the basic block diagram of underwater optical communication [
8]. The setup comprises a modulator and laser source. The laser beam is controlled by a beam steering mechanism. The transmitted signal is received at the receiver side and the output is produced at the receiver side after demodulation of the received signal.
However, due to suspended particles underwater, optical signals face many challenges as they lead to scattering of the optical signals. Disturbance in optical communication can also be caused due to sunlight. Line of sight is also the limitation of optical tracking [
8]. Characteristics of different water bodies are not similar (varying from shallow water bodies to deep ocean). Their properties also vary geographically. Therefore, instead of deploying a single optical beam in an optical tracker, the diffused transmitted light is preferred to provide the broader underwater communication channel between transmitter and receiver.
For seawater, the water absorption coefficient is dependent on the chlorophyll concentration of the water. According to [
14] the absorption coefficient of the seawater dependent on the chlorophyll concentration can be given in Equation (1) as:
where
is the absorption coefficient of pure water in inverse meters,
is the specific absorption coefficient of chlorophyll in inverse meters,
is the vacuum length of light in nanometres,
is the total concentration of chlorophyll which is in milligrams per cubic meter,
= 1 mg/m
3,
is the specific absorption coefficient of fulvic acid which has the typical value of 35.959 m
2/mg and is the first component of dissolved organic matter in the seawater,
is the constant, having a value of 0.0189 nm
−1,
is the specific absorption coefficient of humic acid which has the typical value of 18.828 m
2/mg and is the second component of dissolved organic matter in seawater,
is the constant having value of 0.01105 nm
−1,
and
are concentrations of humic and fulvic acids, respectively, in mg/cm
3. The value of
and
can be referred to from [
6,
7].
The chlorophyll profile
over a depth
d(
m) from the surface can be described as a Gaussian curve that includes five parameters is given by Equation (2) [
11]:
where
is the vertical gradient of the concentration, which is a negative value due to the slow decrement in chlorophyll concentration with the increasing depth of the seawater,
is the total concentration of chlorophyll above the background levels, and
is the depth of the deep chlorophyll maximum. The standard deviation of chlorophyll concentration
can be obtained using Equation (3) [
27]:
The chlorophyll concentration profiles differ in the ocean and, therefore, the profile shape alters. The ocean locations were allocated to one of the nine groups, and each group represented a different range of surface chlorophyll concentrations. The values of the chlorophyll concentrations are given in
Table 3 below.
Figure 2a,b represent the plot of chlorophyll profiles for S
1–S
4 and S
5–S
9 respectively.
The value of scattering and diffuse coefficient is low in the seawater. Therefore, the propagation of the optical beam is almost a straight line. Moreover, the attenuation caused by sunlight also plays an important role in optical tracker-based communication [
29]. As we are considering pure sea or clear ocean for underwater communication, it is evident that the operating wavelength is 450–500 nm (blue-green region of visible light) [
8]. For this purpose, an optical tracker with the transmitter using an argon ion laser or doubled Ti–sapphire can be used. A color-selective retroreflector link can be employed in the receiver to receive and reflect the blue-green laser to the transmitting source [
30]. The
the received power through the retroreflective link can be given by Equation (4) [
31]:
where
is the optical efficiency of the retroreflector,
is the aperture area of the retroreflector,
is the divergence angle of the retroreflector,
is the average power of the optical transmitter,
is the optical efficiency of the transmitter,
is the angle which is perpendicular to the trajectory of transmitter-receiver and receiver plane,
is the aperture area of the receiver,
is the perpendicular distance between receiver and transmitter plane.
is the operating wavelength (450 to 500 nm in this case).
Figure 3 presents the model for optical tracking-based aquatic communication.
4. Electromagnetic Tracking-Based Model for Wireless Aquatic Communication
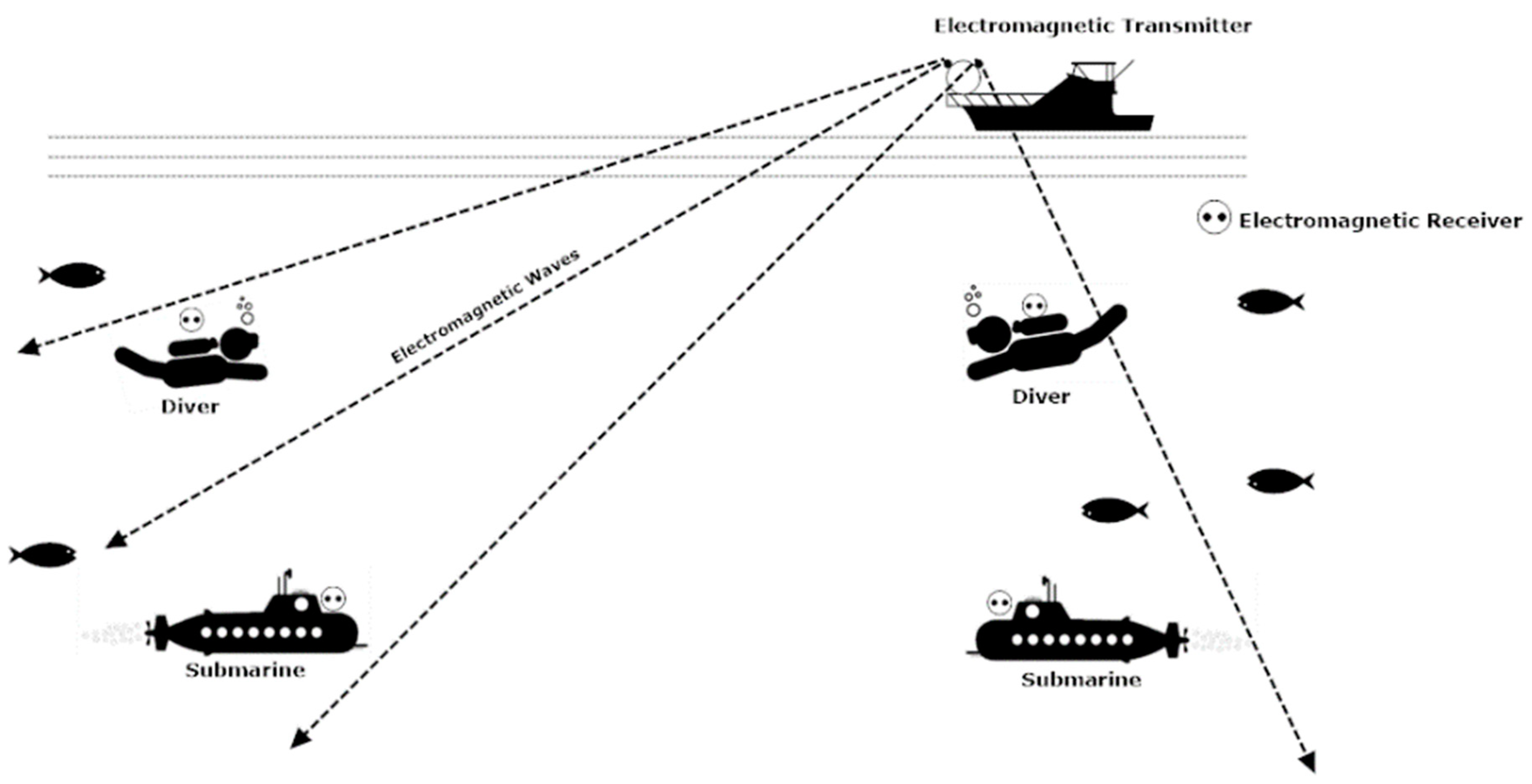
Electromagnetic tracking can also be used for communication between underwater and terrestrial bodies. Electromagnetic tracking can be used for communication between a diver, deeply merged submarine, and the ship on the surface of the water [
32]. The electromagnetic tracking waves can operate from 100 Hz to 10 Mhz. The range is the main limitation of electromagnetic tracking-based wireless communication as it is more efficient in the short-range [
33]. However, communication cannot be hindered by limitations like a line of sight, scattering, dispersion, and sunlight. Electromagnetic waves can cross water or the sea bed easily.
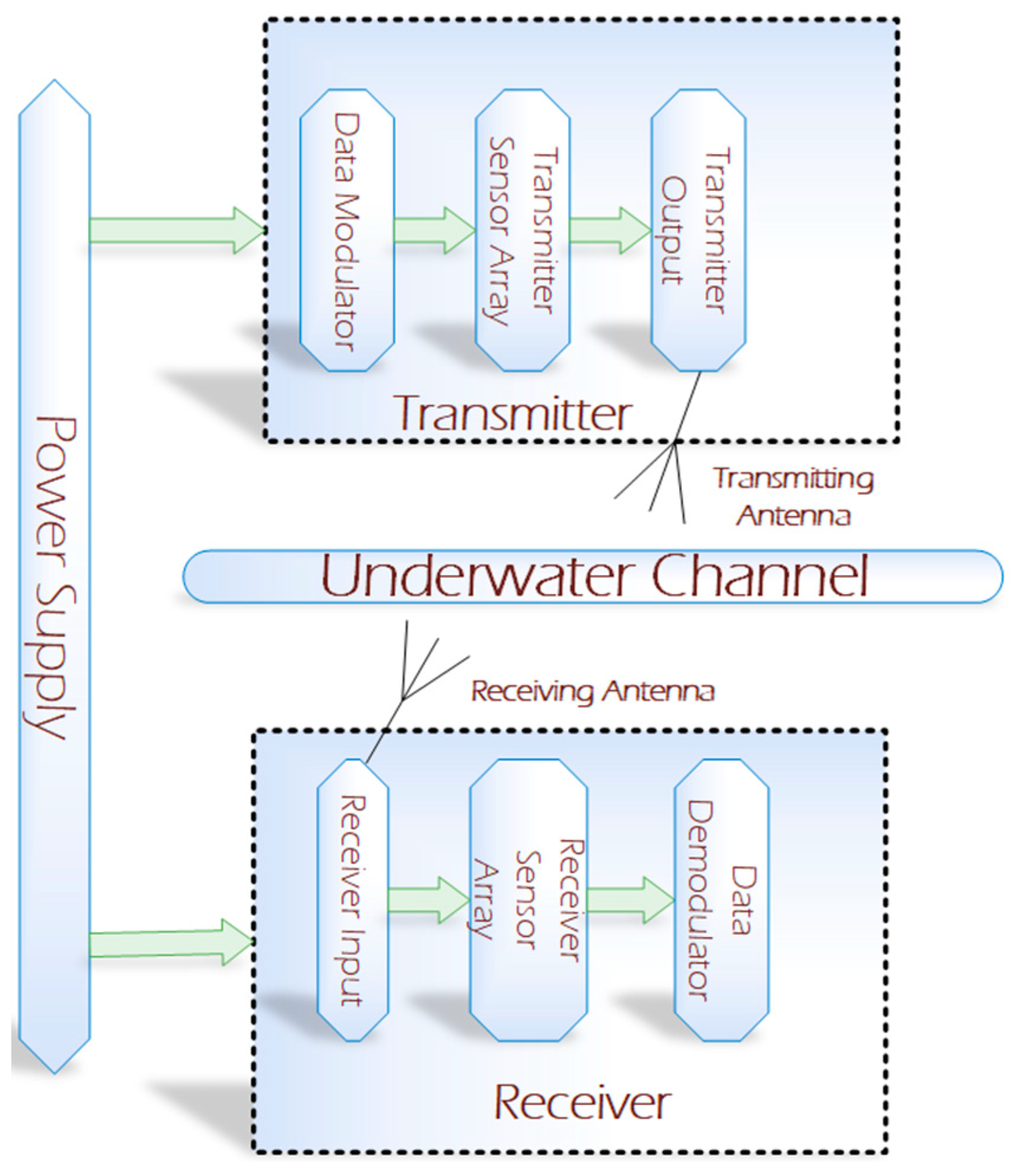
Figure 4 represents the basic block diagram of underwater electromagnetic communication [
34]. The transmitter module consists of a data modulator and an array of sensors. The transmission of the signal is undertaken using the transmitting antenna. The receiving antenna receives the signal from the transmitter module and further processes it to the demodulation module for its final output [
35].
The network used for tracking can be based on network communications [
36]. It can also communicate without the need for LOS and is also more immune to acoustic noise [
37]. The bandwidth of electromagnetic tracking-based wireless communication is very high (up to 100 Mbps) in a short-range. The propagation of electromagnetic waves in water is a challenging task as compared to air. This is due to the high electrical conductivity and permittivity of water. This problem can also be solved using a multihop approach [
38,
39]. The velocity of the electromagnetic wave underwater can be given by the general Equation (5) [
40]:
where
is the conduction in water,
is the operating frequency, and
is the propagation velocity of the electromagnetic wave in the water. The wavelength
is given by Equation (6) [
40]:
is the skin depth of the water which is given by Equation (7) [
40]:
Figure 5 shows the basic model of underwater electromagnetic tracking based on wireless communication.
Underwater, the conductivity
is set to 3.2 S/m at 100 Hz frequency and 5.4 S/m at 10 MHz.
Table 4 shows the typical values of the propagation velocity and wavelength (Equations (5) and (6) of an electromagnetic wave in seawater. For the sake of comparison, the propagation velocity of the acoustic tracking system is also presented, which is fixed at 1500 m/s.
It can be observed that the propagation velocity of the electromagnetic wave of 10 MHz frequency underwater is increased 100 times that of the acoustic tracking system. This is an important ingredient to control the latency. The impact of change in frequency on wavelength can also be observed in
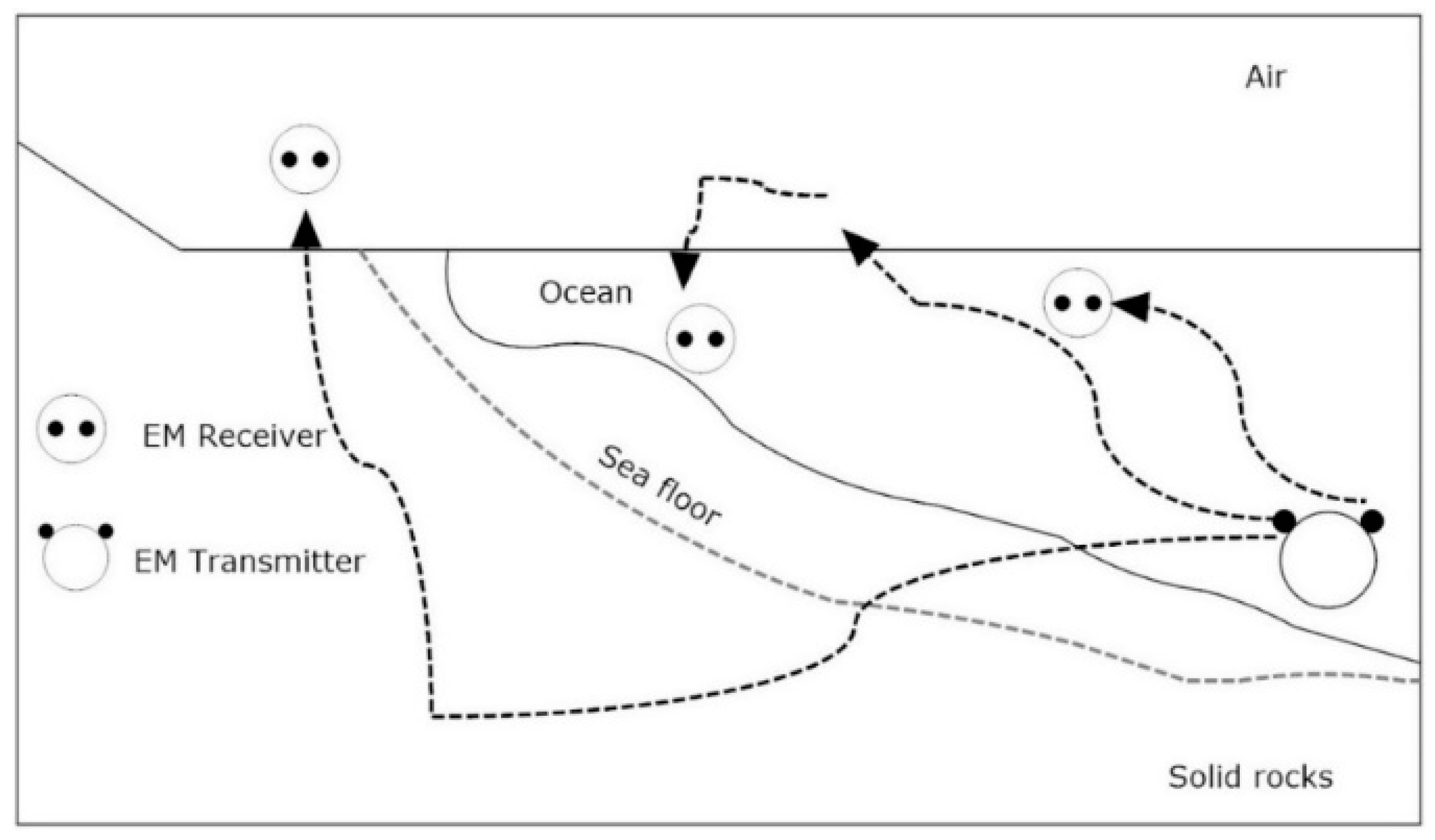
Table 4. As the frequency increases in seawater, the wavelength decreases in magnitude. This effect can help in the implementation of the navigational and sensing applications. It is also an interesting fact that electromagnetic waves get attenuated more in water than air due to which localized communication becomes easier in a multiuser environment. The effect of water to air interface is also an important consideration in electromagnetic tracking performance. Due to specific refraction loss and propagation loss, the electromagnetic wave crosses the water-to-air boundary and radiates from the small section of water directly above the transmitting end. Due to high permittivity and large refraction angle the signal travels almost parallel to the surface of the seawater. This phenomenon eliminates the need for surface repeater buoys in case of communication between land and a submerged station or a submarine. These all factors can enable multipath propagation of electromagnetic waves as shown in
Figure 6 [
40].
Table 5 represents the different data rates and applications of electromagnetic waves in water.
4.1. Absorption Coefficient in Seawater
It is evident that the absorption coefficient
of an EM wave is dependent on the frequency of the wave. It is given by Equation (8) [
13]:
where
is magnetic permeability,
is electromagnetic frequency, and
is electrical conductivity. The absorption coefficient in the seawater is directly proportional to the electromagnetic frequency. However, as shown in
Figure 7, the absorption coefficient increases with the increase in frequency, it becomes nearly impossible to communicate under the water using electromagnetic technology. Therefore, low frequency is preferred for electromagnetic tracking. Using low-frequency electromagnetic tracking can be achieved up to 25 m. This limitation can be eradicated by using a hybrid version of optical and magnetic tracking under the water, which is discussed in the next section.
4.2. Absorption Coefficient in Freshwater
The absorption coefficient
of an EM wave is independent of the frequency of the wave in freshwater. It is given by Equation (9) [
13]:
where
is electric conductivity,
is magnetic permeability and
is dielectric permittivity. The rate of communication is high in the freshwater as the absorption coefficient is not dependent on frequency. It can be noticed in Equation (6) that the absorption coefficient will almost be the constant value. Therefore, electromagnetic tracking-based communication is more efficient in freshwater as compared to seawater.
4.3. The Velocity of Electromagnetic Tracking-Based Communication in Water
The propagation velocity of electromagnetic waves in seawater is frequency-dependent. It increases as the frequency value of electromagnetic waves is increased. Its value is approximated as given by Equation (10) [
40]:
where
is the propagation velocity of an electromagnetic wave in seawater,
is the frequency of an electromagnetic wave,
is the conductivity, and
is the permeability of an electromagnetic wave. However, the velocity of electromagnetic waves in freshwater is decreased by nine times and is almost constant as compared to the speed in air. The propagation velocity versus frequency is plotted in
Figure 8.
4.4. Path Loss in Electromagnetic Underwater Communication
For efficient deployment of electromagnetic tracking-based communication, the channel characterization should be accurate. Channel path loss is the difference between the transmitted signal power and the received signal power. The power received by the receiver underwater is given by Equation (11):
where
power is received by the receiver (submarine/diver) under the water,
is the power transmitted by the transmitter outside the water,
is the total gain of receiver and transmitter, and
is the free space path loss under the water in decibels. The efficiency of electromagnetic tracking-based communication is maximum in the range of 100 m. The
is given by Equation (12):
is the distance between transmitter and receiver and
is the wavelength in free space in meters.
Table 6 represents the different types of tracking techniques used in underwater object tracking. The table also shows the single technique and hybrid techniques used for underwater object tracking. Optical and electromagnetic techniques have not been fused until now for underwater object tracking.
Section 5 discusses the possible hybridization of optical and electromagnetic underwater tracking techniques.
5. Possible Prototype Model of a Hybrid Opto-Magnetic Tracking-Based Diver Tracking System
There may be a lesser need for LOS in electromagnetic-based communication depending on the amount of obstruction present in the seawater. Moreover, there is no effect of scattering, sunlight, and much less effect of dispersion in electromagnetic waves as compared to optical-based tracking. On the other hand, optical technology needs LOS for communication. It is also affected by dispersion, scattering, and sunlight interference. However, its bit rate is much more than electromagnetic-based communication. Moreover, low power is required in optical communication. Therefore, taking advantage of both technologies, the hybrid version of both optical and electromagnetic tracking based wireless communication is discussed for aquatic communication.
Figure 9 shows the features of the hybrid diver-tracking system.
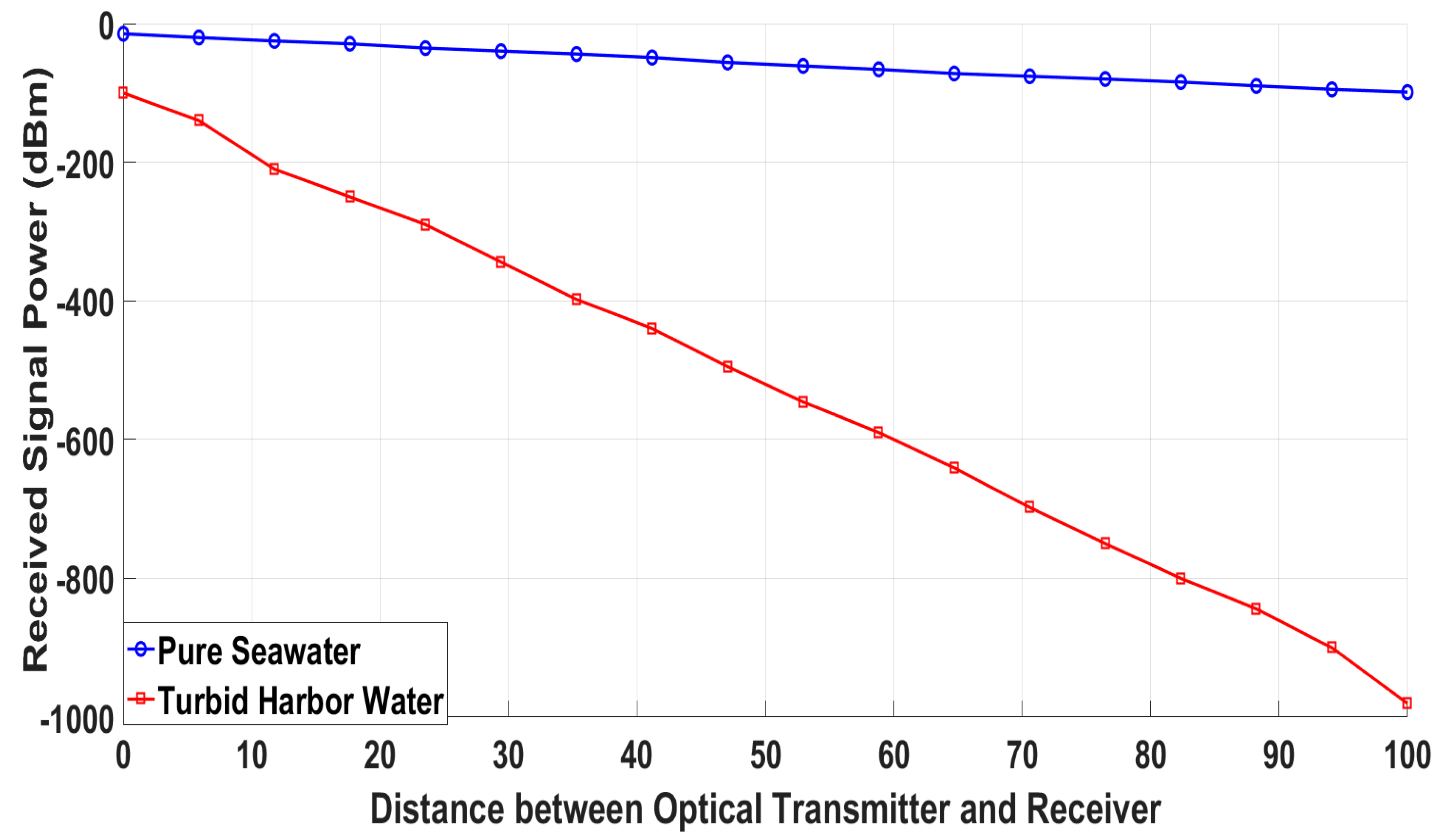
In this manuscript, the amalgamation of optical and electromagnetic tracking is proposed for better efficiency of underwater diver tracking. Considering the optical tracking system for diver tracking, the power received by the receiver allows us to inspect the tracking range of an optical tracker in turbid harbor water with variation in distance. Using Equation (4) again, the power received
by the Optical retroreflector is given by:
The parameters used for simulating and studying the power received against different distances are given below in
Table 7.
The parameters in
Table 7 are the general parameters in which the performance of an optical tracker is best. The transmitting power is generally chosen between 10 to 100 milliwatt for a tracking range of 100 m [
8]. Divergence angle
is typically less than
[
31]. Transmitting and receiver efficiency lies between 0.4 and 0.9. Aperture area of the receiver is between 10 cm
2 to 100 cm
2 for optimum performance. The data rate is affected by aperture area of the receiver, optical depth range, and operating wavelength. Substituting the values of parameters given in
Table 7 in the general equation of received power, Equation (4), for simulating the results.
Figure 10 shows the simulation results of the optical tracker with different distances between diver and retroreflector in pure seawater and turbid harbor water.
Now for a secondary component, the general path loss (in dB) in electromagnetic underwater tracking is given by Equation (14) [
48].
where
is the distance between the diver and electromagnetic tracker (depth) and
is the propagation constant. Equation (13) is used for simulating and analyzing the path loss in electromagnetic tracking for different distances.
Figure 11 shows the path loss in electromagnetic tracking against different distances between the diver and electromagnetic tracker. It is evident from
Figure 11 that the path loss increases as a diver goes deep in the sea resulting in the inaccuracy of tracked coordinates. Coordinates can also be acquired in turbid water where chlorophyll matter is greater. This is the main advantage of an electromagnetic tracker.
The acquisition of 6-Degrees of Freedom (6-DoF) coordinates, that are X, Y, Z, Yaw, Pitch and Roll of the diver can be achieved through the hybrid tracking system by initiating it in the switching mode. The flowchart shown in
Figure 12 describes the possible working of the hybrid diver-tracking system.
The accuracy of an electromagnetic tracker is high up to 15–20 m, but after exceeding the depth of 20 m the accuracy of an electromagnetic tracker declines. The proposed flowchart is intended to initiate with electromagnetic tracking if the diver depth is less than 15 m. If the diver depth increases and the chlorophyll content is under the permissible level then an increase in path loss will switch the tracking to optical mode. Similarly, if chlorophyll content increases, then the decrease in received power signal will switch the tracking to optical mode. The purpose of the hybrid version is to increase the tracking accuracy of the 3-DoF axis (X, Y, and Z) of the objects underwater.
Figure 13 shows the possible hybrid model of optical and electromagnetic tracking-based wireless communication in the sea.
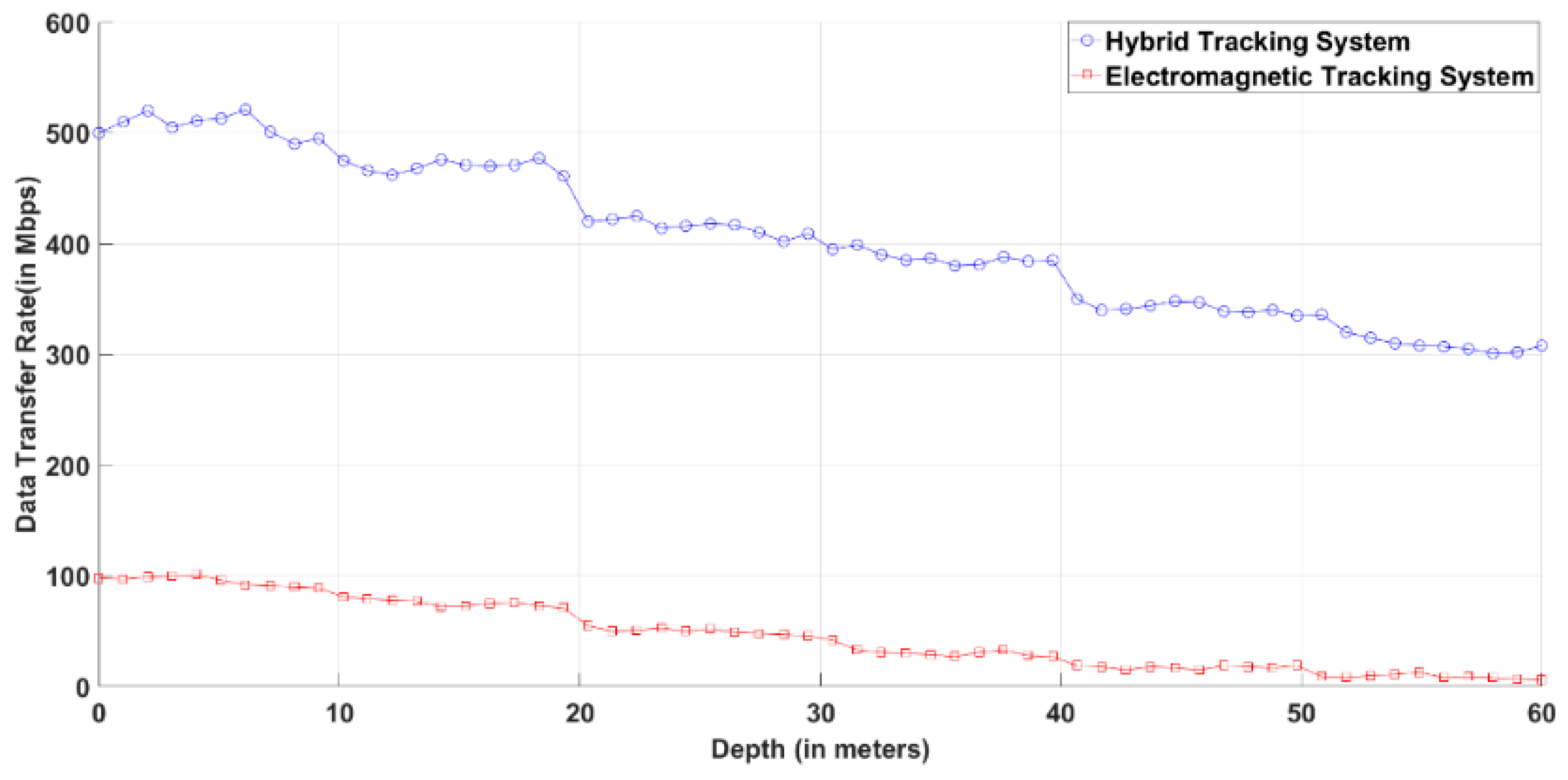
Figure 14 represents the data rate of the electromagnetic tracker and hybrid tracker. The data rate decreases in the case of both electromagnetic tracker and hybrid tracker as the depth of the seawater increases due to turbidity and dirt in the seawater. However, the decrease in data transfer rate is significantly less in the case of a hybrid tracking system as compared to the electromagnetic tracking system alone. The data rate shown in
Figure 14 is simulated using Equations (15) and (16).
The channel capacity of the electromagnetic tracker is given by Equation (15) [
49].
where
is ergodic capacity,
is the power spectrum density of the signal transmitted by the electromagnetic tracker,
is the noise in the signal,
is the channel frequency response and
is the expectation. Data rate
in optical communication for both free space and underwater is given by the general Equation (16) [
50].
where
is the power transmitted by the optical transmitter,
and
are the optical transmitter and receiver efficiency, respectively,
is the area of the receiving module,
is the divergence angle of the transmitter,
is the range,
is the energy of the photon, and
is the sensitivity of the receiver (photons/bit).

 ,
, 















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}