Underwater Hyperspectral Imaging Technology and Its Applications for Detecting and Mapping the Seafloor: A Review

 ,
, 
 , ,
, , 
Abstract
:1. Introduction
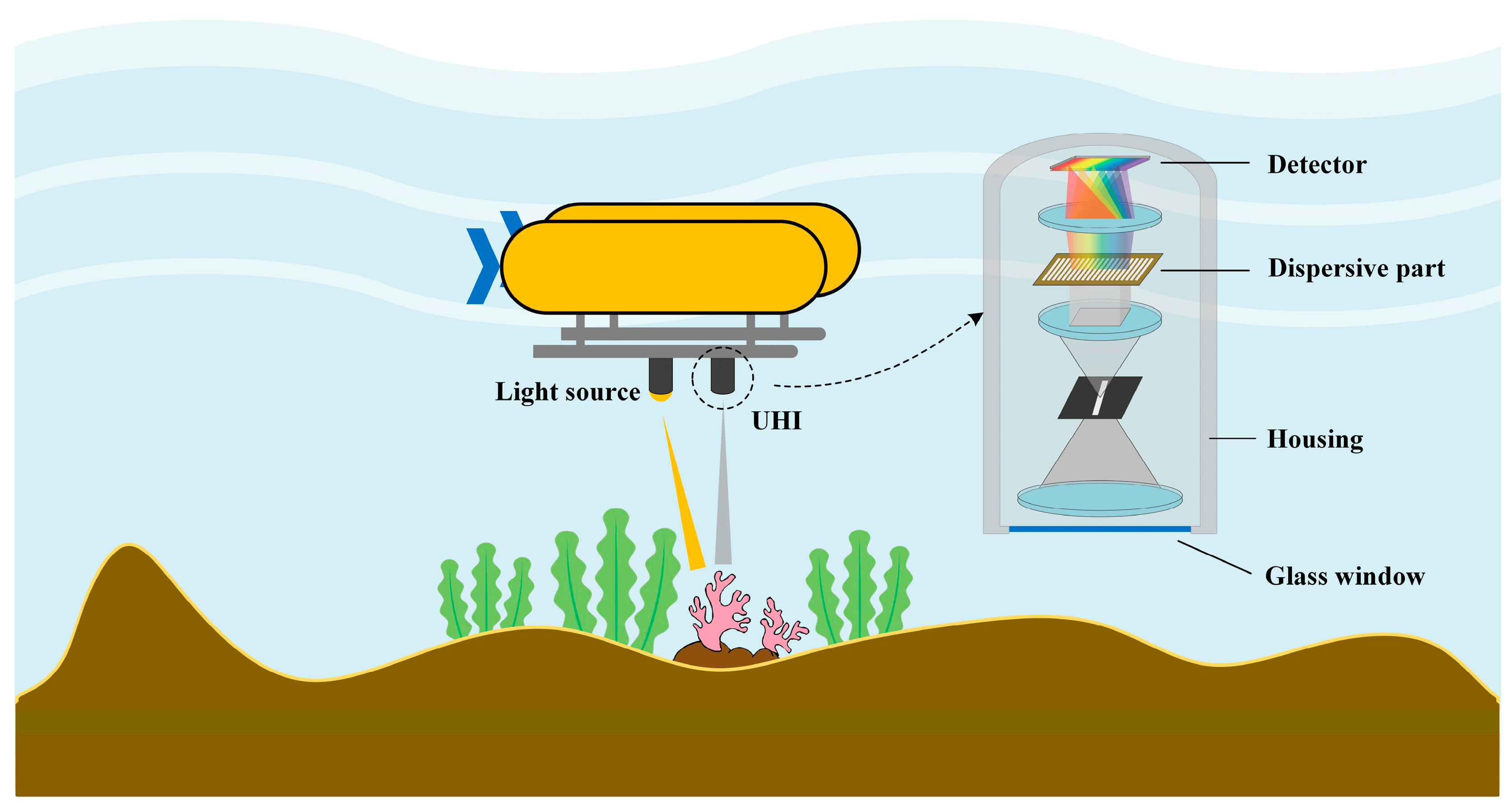
2. Underwater Hyperspectral Imaging System
2.1. Underwater Hyperspectral Imager
2.2. Light Source
2.3. Sensors
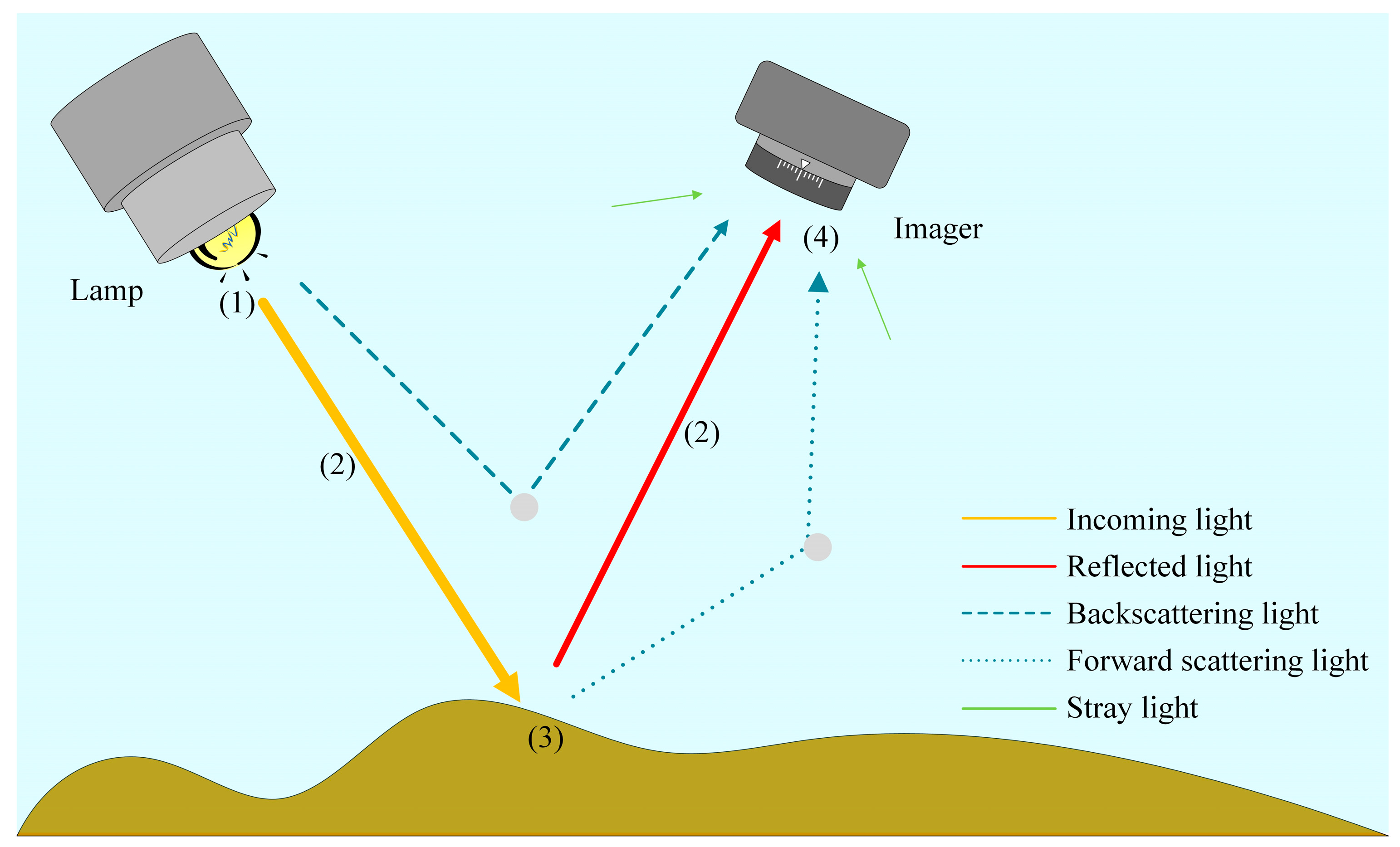
3. Consideration of the Water Column’s Influence in Image Processing
4. Applications of Underwater Hyperspectral Imaging Technology
4.1. Marine Mineral Exploration
4.2. Benthic Habitat Mapping
4.2.1. Laboratory Study of Marine Organisms
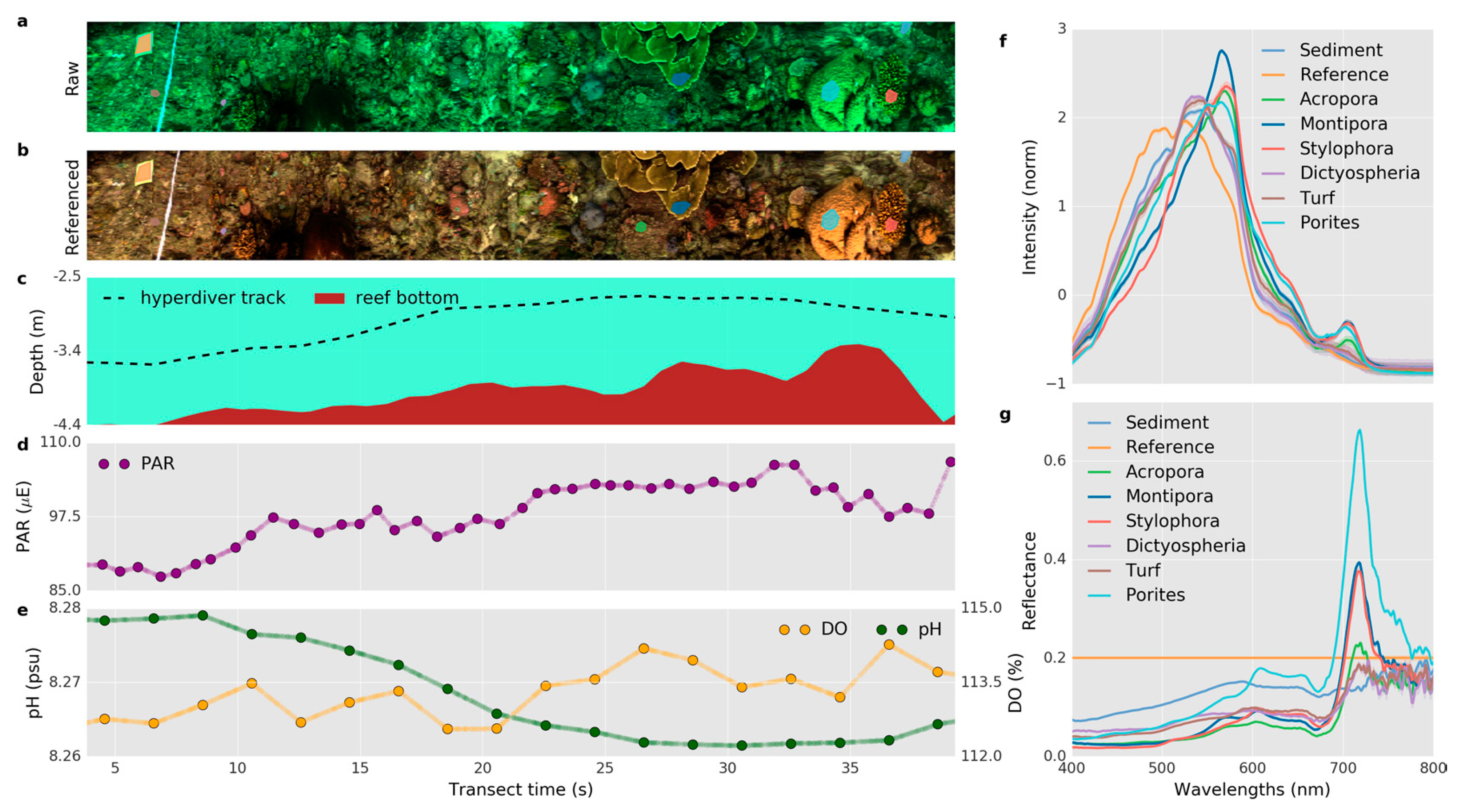
4.2.2. Shallow Water Benthic Habitat Mapping
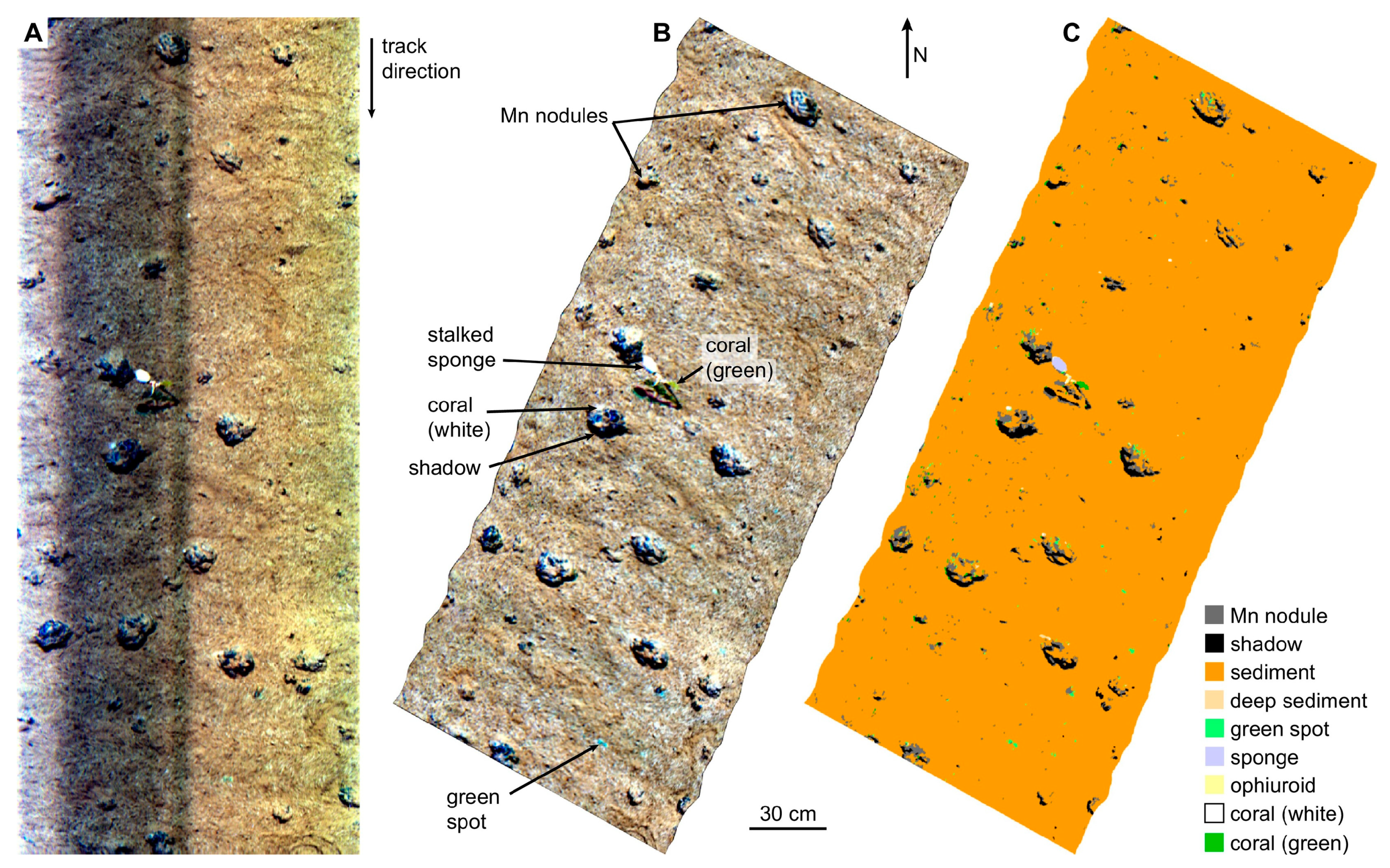
4.2.3. Deep-Sea Survey
4.3. Underwater Archaeology and Pipeline Inspection
5. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Goetz, A.; Vane, G.; Solomon, J.; Rock, B. Imaging spectrometry for earth remote-sensing. Science 1985, 228, 1147–1153. [Google Scholar] [CrossRef] [PubMed]
- Van der Meer, F.D.; Van der Werff, H.M.A.; van Ruitenbeek, F.J.A.; Hecker, C.A.; Bakker, W.H.; Noomen, M.F.; van der Meijde, M.; Carranza, E.J.M.; de Smeth, J.B.; Woldai, T. Multi- and hyperspectral geologic remote sensing: A review. Int. J. Appl. Earth Obs. Geoinf. 2012, 14, 112–128. [Google Scholar] [CrossRef]
- Krupnik, D.; Khan, S. Close-range, ground-based hyperspectral imaging for mining applications at various scales: Review and case studies. Earth-Sci. Rev. 2019, 198, 102952. [Google Scholar] [CrossRef]
- Maes, W.H.; Steppe, K. Perspectives for remote sensing with unmanned aerial vehicles in precision agriculture. Trends Plant Sci. 2019, 24, 152–164. [Google Scholar] [CrossRef]
- Adao, T.; Hruska, J.; Padua, L.; Bessa, J.; Peres, E.; Morais, R.; Sousa, J.J. Hyperspectral imaging: A review on UAV-based sensors, Data processing and applications for agriculture and forestry. Remote Sens. 2017, 9, 1110. [Google Scholar] [CrossRef] [Green Version]
- Duan, W.; Chen, Y.; Zou, S.; Nover, D. Estimation of Total Water Storage Changes over the Balkhash Lake Basin of Central Asia from Multi-Satellite Data; AGU: Washington, DC, USA, 2018.
- Pu, H.; Liu, D.; Qu, J.-H.; Sun, D.-W. Applications of imaging spectrometry in inland water quality monitoring-a review of recent developments. Water Air Soil Pollut. 2017, 228, 131. [Google Scholar] [CrossRef]
- Manfreda, S.; McCabe, M.E.; Miller, P.E.; Lucas, R.; Madrigal, V.P.; Mallinis, G.; Ben Dor, E.; Helman, D.; Estes, L.; Ciraolo, G.; et al. On the use of unmanned aerial systems for environmental monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef] [Green Version]
- Shi, T.; Chen, Y.; Liu, Y.; Wu, G. Visible and near-infrared reflectance spectroscopy-An alternative for monitoring soil contamination by heavy metals. J. Hazard. Mater. 2014, 265, 166–176. [Google Scholar] [CrossRef]
- Zhu, W.; Yu, Q. Inversion of Chromophoric Dissolved Organic Matter From EO-1 Hyperion Imagery for Turbid Estuarine and Coastal Waters. IEEE Trans. Geosci. Remote Sens. 2013, 51, 3286–3298. [Google Scholar] [CrossRef]
- Dierssen, H.M.; Zimmerman, R.C.; Leathers, R.A.; Downes, T.V.; Davis, C.O. Ocean color remote sensing of seagrass and bathymetry in the Bahamas Banks by high-resolution airborne imagery. Limnol. Oceanogr. 2003, 48, 444–455. [Google Scholar] [CrossRef]
- Lubac, B.; Loisel, H.; Guiselin, N.; Astoreca, R.; Artigas, L.F.; Meriaux, X. Hyperspectral and multispectral ocean color inversions to detect Phaeocystis globosa blooms in coastal waters. J. Geophys. Res. Oceans 2008, 113, C06026. [Google Scholar] [CrossRef]
- Ciampalini, A.; Consoloni, I.; Salvatici, T.; Di Traglia, F.; Fidolini, F.; Sarti, G.; Moretti, S. Characterization of coastal environment by means of hyper- and multispectral techniques. Appl. Geogr. 2015, 57, 120–132. [Google Scholar] [CrossRef]
- Marcello, J.; Eugenio, F.; Martin, J.; Marques, F. Seabed mapping in coastal shallow waters using high resolution multispectral and hyperspectral imagery. Remote Sens. 2018, 10, 1208. [Google Scholar] [CrossRef] [Green Version]
- Malthus, T.J.; Mumby, P.J. Remote sensing of the coastal zone: An overview and priorities for future research. Int. J. Remote Sens. 2003, 24, 2805–2815. [Google Scholar] [CrossRef]
- Dierssen, H.; McManus, G.B.; Chlus, A.; Qiu, D.; Gao, B.-C.; Lin, S. Space station image captures a red tide ciliate bloom at high spectral and spatial resolution. Proc. Natl. Acad. Sci. USA 2015, 112, 14783–14787. [Google Scholar] [CrossRef] [Green Version]
- Kudela, R.M.; Palacios, S.L.; Austerberry, D.C.; Accorsi, E.K.; Guild, L.S.; Torres-Perez, J. Application of hyperspectral remote sensing to cyanobacterial blooms in inland waters. Remote Sens. Environ. 2015, 167, 196–205. [Google Scholar] [CrossRef] [Green Version]
- Leifer, I.; Lehr, W.J.; Simecek-Beatty, D.; Bradley, E.; Clark, R.; Dennison, P.; Hu, Y.; Matheson, S.; Jones, C.E.; Holt, B.; et al. State of the art satellite and airborne marine oil spill remote sensing: Application to the BP Deepwater Horizon oil spill. Remote Sens. Environ. 2012, 124, 185–209. [Google Scholar] [CrossRef] [Green Version]
- Mumby, P.J.; Skirving, W.; Strong, A.E.; Hardy, J.T.; LeDrew, E.F.; Hochberg, E.J.; Stumpf, R.P.; David, L.T. Remote sensing of coral reefs and their physical environment. Mar. Pollut. Bull. 2004, 48, 219–228. [Google Scholar] [CrossRef]
- Heumann, B.W. Satellite remote sensing of mangrove forests: Recent advances and future opportunities. Prog. Phys. Geogr. 2011, 35, 87–108. [Google Scholar] [CrossRef]
- Volent, Z.; Johnsen, G.; Sigernes, F. Kelp forest mapping by use of airborne hyperspectral imager. J. Appl. Remote Sens. 2007, 1, 011503. [Google Scholar] [CrossRef]
- Dierssen, H.M. Overview of hyperspectral remote sensing for mapping marine benthic habitats from airborne and underwater sensors. Proc. SPIE 2013, 8870, 88700L. [Google Scholar]
- Lodhi, V.; Chakravarty, D.; Mitra, P. Hyperspectral Imaging for Earth Observation: Platforms and Instruments. J. Indian Inst. Sci. 2018, 98, 429–443. [Google Scholar] [CrossRef]
- Johnsen, G.; Volent, Z.; Dierssen, H.; Pettersen, R.; Ardelan, M.V.; Søreide, F.; Fearns, P.; Ludvigsen, M.; Moline, M. Underwater hyperspectral imagery to create biogeochemical maps of seafloor properties. In Subsea Optics and Imaging; Elsevier: Amsterdam, The Netherlands, 2013; pp. 508–540e. ISBN 978-0-85709-341-7. [Google Scholar]
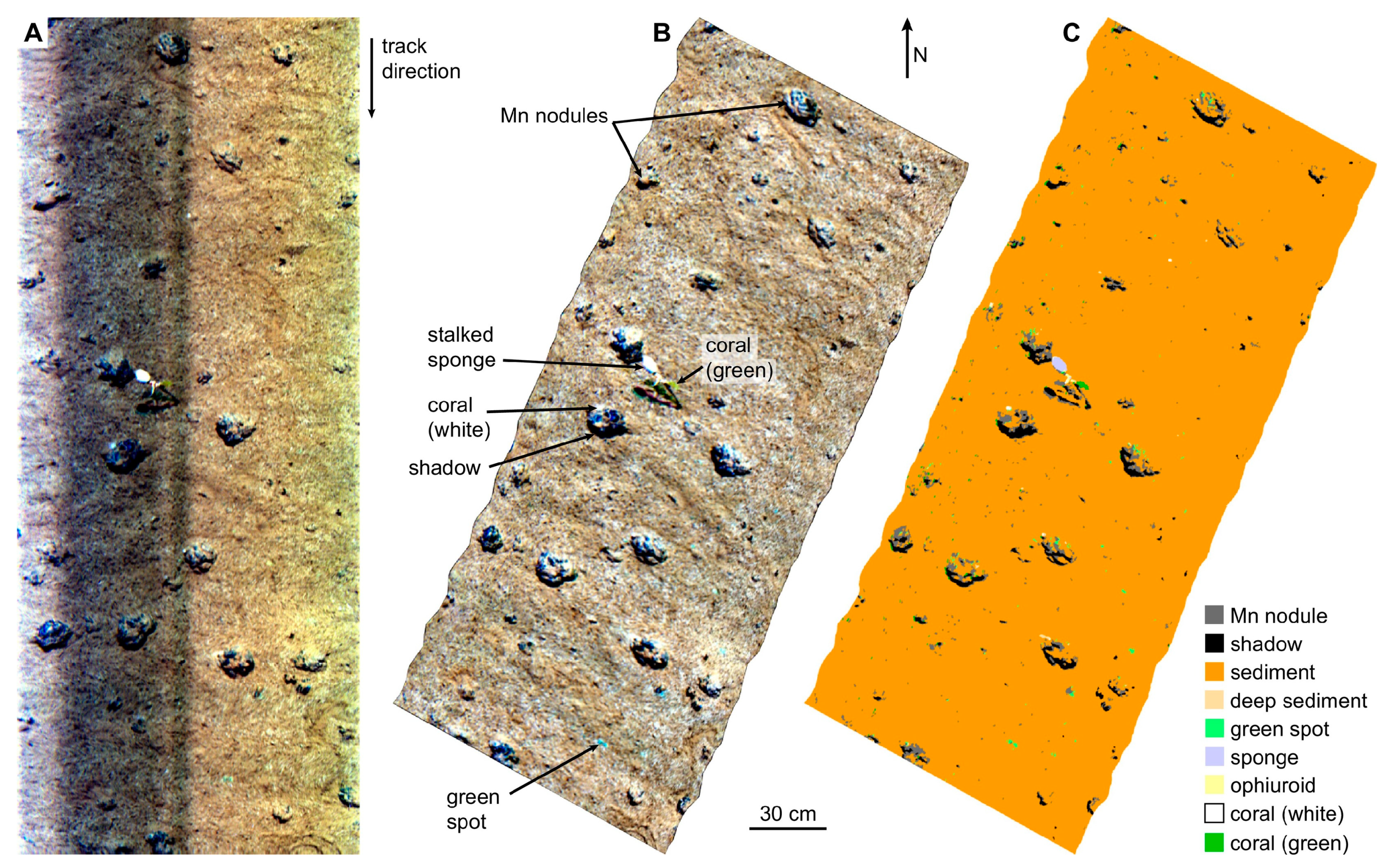
- Dumke, I.; Nornes, S.M.; Purser, A.; Marcon, Y.; Ludvigsen, M.; Ellefmo, S.L.; Johnsen, G.; Søreide, F. First hyperspectral imaging survey of the deep seafloor: High-resolution mapping of manganese nodules. Remote Sens. Environ. 2018, 209, 19–30. [Google Scholar] [CrossRef]
- Foglini, F.; Chimienti, G.; Meroni, A.N.; Prampolini, M.; Badalamenti, F.; Martorelli, E.; Angeletti, L.; Grande, V.; Marchese, F.; Taviani, M.; et al. Underwater Hyperspectral Imaging for Seafloor and Benthic Habitat Mapping; IEEE: New York, NY, USA, 2018; pp. 201–205. ISBN 978-1-5386-7644-8. [Google Scholar]
- Odegard, O.; Mogstad, A.A.; Johnsen, G.; Sorensen, A.J.; Ludvigsen, M. Underwater hyperspectral imaging: A new tool for marine archaeology. Appl. Opt. 2018, 57, 3214–3223. [Google Scholar] [CrossRef] [Green Version]
- Phillips, B.T.; Licht, S.; Haiat, K.S.; Bonney, J.; Allder, J.; Chaloux, N.; Shomberg, R.; Noyes, T.J. DEEPi: A miniaturized, robust, and economical camera and computer system for deep-sea exploration. Deep-Sea Res. Part I Oceanogr. Res. Pap. 2019, 153, 103136. [Google Scholar] [CrossRef]
- Zawada, D.G. The Application of a Novel Multispectral Imaging System to the In Vivo Study of Fluorescent Compounds in Selected Marine Organisms. Doctoral Dissertation, University of California, San Diego, CA, USA, 2002; p. 141. [Google Scholar]
- Gleason, A.C.R.; Reid, R.P.; Voss, K.J. Automated classification of underwater multispectral imagery for coral reef monitoring. In Proceedings of the OCEANS 2007, Vancouver, BC, Canada, 29 September–4 October 2007; pp. 1–8. [Google Scholar]
- Wu, C.; Shentu, Y.; Chaofan, C.; Guo, Y.; Zhang, Y.; Wei, H.; Yang, P.; Huang, H.; Song, H. Development of an underwater multispectral imaging system based on narrowband color filters. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, Charleston, SC, USA, 22–25 October 2018; pp. 1–6. [Google Scholar]
- Liu, H.; Sticklus, J.; Koeser, K.; Hoving, H.-J.T.; Song, H.; Chen, Y.; Greinert, J.; Schoening, T. TuLUMIS—A tunable LED-based underwater multispectral imaging system. Opt. Express 2018, 26, 7811–7828. [Google Scholar] [CrossRef]
- Song, H.; Wan, Q.; Wu, P.; Shentu, Y.; Wang, W.; Yang, P.; Jia, W.; Li, H.; Huang, H.; Wang, H.; et al. Development of an underwater spectral imaging system based on LCTF. Infrared Laser Eng. 2020, 49, 56–62. [Google Scholar]
- Johnsen, G. Underwater Hyperspectral Imaging. U.S. Patent 8,502,974, 6 August 2009. [Google Scholar]
- Lee, L.-J.; Hwang, C.; Chang, C.-H.; Burch, M.; Fernandes, M. The health study of seagrass and coral reff by underwater hyperspectral imager. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; IEEE: New York, NY, USA, 2015; pp. 3521–3523, ISBN 978-1-4799-7929-5. [Google Scholar]
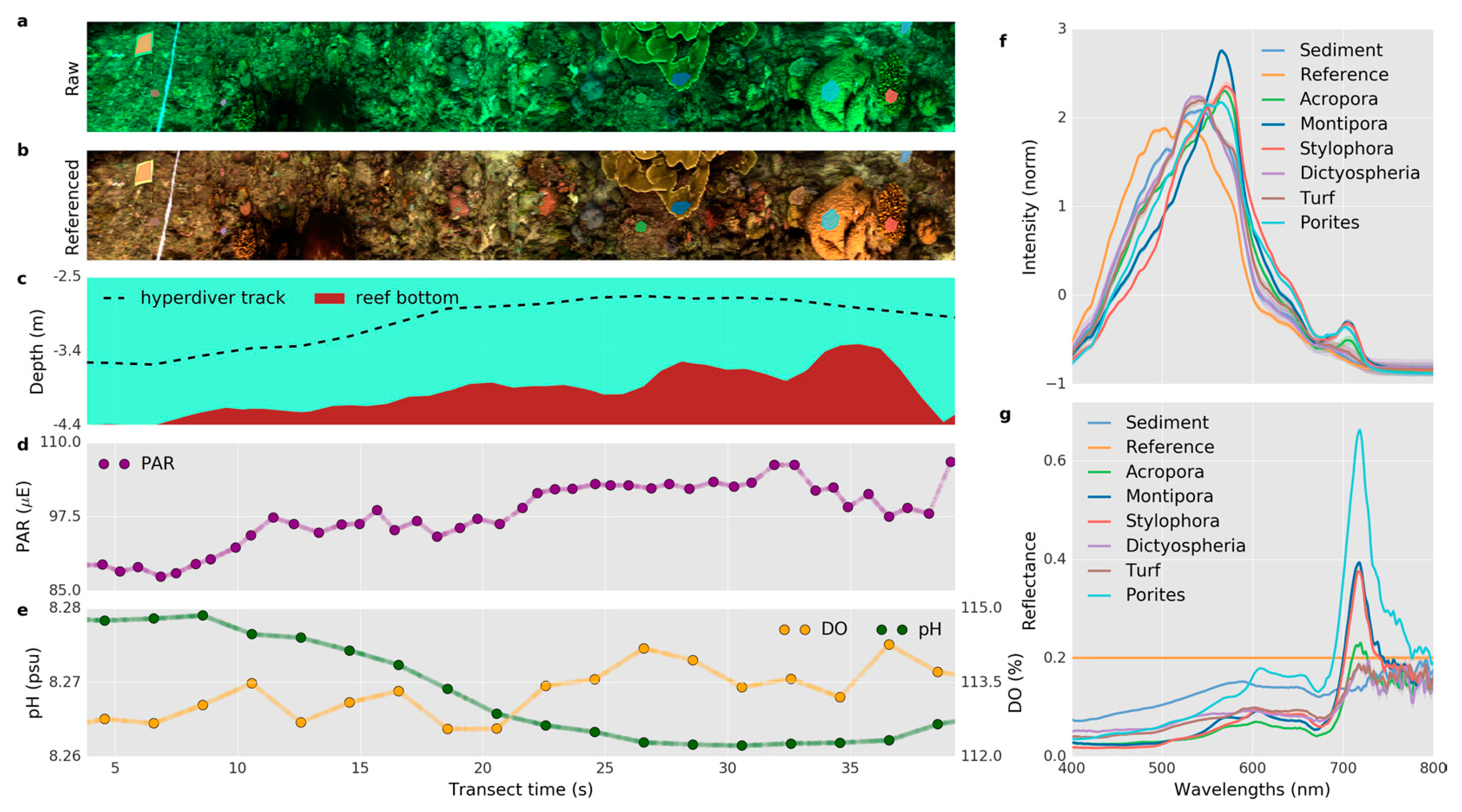
- Chennu, A.; Faeber, P.; De’ath, G.; de Beer, D.; Fabricius, K.E. A diver-operated hyperspectral imaging and topographic surveying system for automated mapping of benthic habitats. Sci. Rep. 2017, 7, 7122. [Google Scholar] [CrossRef]
- Nevala, N.E.; Baden, T. A low-cost hyperspectral scanner for natural imaging and the study of animal colour vision above and under water. Sci. Rep. 2019, 9, 10799. [Google Scholar] [CrossRef] [Green Version]
- Lei, Y.; Ming-ming, X.; Jie-xiang, C.; Hui, X. Optical system of the hyper-spectral imager for the underwater environment and targets monitoring. Acta Photon. Sin. 2018, 47, 1101003. [Google Scholar] [CrossRef]
- Kwon, Y.H.; Casebolt, J.B. Effects of light refraction on the accuracy of camera calibration and reconstruction in underwater motion analysis. Sport. Biomech. 2006, 5, 95–120. [Google Scholar] [CrossRef] [PubMed]
- Sedlazeck, A.; Koch, R. Perspective and non-perspective camera models in underwater imaging—Overview and error analysis. In Outdoor and Large-Scale Real-World Scene Analysis. 15th International Workshop on Theoretical Foundations of Computer Vision; Revised Selected Papers; Springer: Berlin/Heidelberg, Germany, 2012; pp. 212–242. [Google Scholar] [CrossRef]
- Bonin, F.; Burguera, A.; Oliver, G. Imaging systems for advanced underwater vehicles. J. Mar. Res. 2011, 8, 65–86. [Google Scholar]
- Gholipour Vazimali, M.; Furxhi, O.; Alahmadi, Y.; Driggers, R. Comparison of illumination sources for imaging systems for different applications. In Proceedings of the Laser Radar Technology and Applications XXIV, Baltimore, MD, USA, 14–18 April 2019; Turner, M.D., Kamerman, G.W., Eds.; SPIE: Bellingham, WA, USA, 2019; p. 35. [Google Scholar]
- Hardy, K.R.; Olsson, M.S.; Lakin, B.P.; Steeves, K.A.; Sanderson, J.R.; Simmons, J.E.; Weber, P.A. Advances in high brightness light emitting diodes in underwater applications. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–5. [Google Scholar]
- Chen, C.; Zhang, X. Design of optical system for collimating the light of an LED uniformly. J. Opt. Soc. Am. A Opt. Image Sci. Vis. 2014, 31, 1118–1125. [Google Scholar] [CrossRef] [PubMed]
- Niu, C.; Zhang, Y.; Zhou, Y.; Shi, K.; Liu, X.; Qin, B. The potential applications of real-time monitoring of water quality in a large shallow lake (Lake Taihu, China) using a chromophoric dissolved organic matter fluorescence sensor. Sensors 2014, 14, 11580–11594. [Google Scholar] [CrossRef] [PubMed]
- Babin, M.; Morel, A.; Fournier-Sicre, V.; Fell, F.; Stramski, D. Light scattering properties of marine particles in coastal and open ocean waters as related to the particle mass concentration. Limnol. Oceanogr. 2003, 48, 843–859. [Google Scholar] [CrossRef]
- Nima, C.; Frette, O.; Hamre, B.; Erga, S.R.; Chen, Y.-C.; Zhao, L.; Sorensen, K.; Norli, M.; Stamnes, K.; Stamnes, J.J. Absorption properties of high-latitude Norwegian coastal water: The impact of CDOM and particulate matter. Estuar. Coast. Shelf Sci. 2016, 178, 158–167. [Google Scholar] [CrossRef] [Green Version]
- Zawada, D.G. Image processing of underwater multispectral imagery. IEEE J. Ocean. Eng. 2003, 28, 583–594. [Google Scholar] [CrossRef]
- Aarrestad, S.M. Use of Underwater Hyperspectral Imagery for Geological Characterization of the Seabed. Master’s Thesis, Norges Teknisk-Naturvitenskaplige Universitet, Trondheim, Norway, 2014; p. 183. [Google Scholar]
- Schubert, H.; Sagert, S.; Forster, R.M. Evaluation of the different levels of variability in the underwater light field of a shallow estuary. Helgoland Mar. Res. 2001, 55, 12–22. [Google Scholar] [CrossRef]
- Kolagani, N.; Fox, J.S.; Blidberg, D.R. Photometric stereo using point light sources. In Proceedings of the 1992 IEEE International Conference on Robotics and Automation, Nice, France, 12–14 May 1992; Volume 2, pp. 1759–1764. [Google Scholar] [CrossRef]
- Guo, Y.; Shentu, Y.; Wu, C.; Zhang, F.; Fang, M.; Song, H. Modeling of axial underwater light filed of articial light source in clean water. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, Charleston, SC, USA, 22–25 October 2018; pp. 1–5. [Google Scholar]
- Mortazavi, H.; Oakley, J.P.; Barkat, B. Mitigating the effect of optical back-scatter in multispectral underwater imaging. Meas. Sci. Technol. 2013, 24, 074025. [Google Scholar] [CrossRef]
- Bryson, M.; Johnson-Roberson, M.; Pizarro, O.; Williams, S.B. True color correction of autonomous underwater vehicle imagery: True color correction of autonomous underwater vehicle imagery. J. Field Robot. 2016, 33, 853–874. [Google Scholar] [CrossRef]
- Sørensen, T.K. Modelling Underwater Hyperspectral Images. Master’s Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2017. [Google Scholar]
- Guo, Y.; Song, H.; Liu, H.; Wei, H.; Yang, P.; Zhan, S.; Wang, H.; Huang, H.; Liao, N.; Mu, Q.; et al. Model-based restoration of underwater spectral images captured with narrowband filters. Opt. Express 2016, 24, 13101. [Google Scholar] [CrossRef] [PubMed]
- McGlamery, B.L. A computer model for underwater camera systems. Proc. Soc. Photo Opt. Instrum. Eng. 1979, 208, 221–231. [Google Scholar]
- Jaffe, J. Computer modeling and the design of optimal underwater imaging-systems. IEEE J. Ocean. Eng. 1990, 15, 101–111. [Google Scholar] [CrossRef]
- Bongiorno, D.L.; Bryson, M.; Williams, S.B. Dynamic spectral-based underwater colour correction. In Proceedings of the 2013 MTS/IEEE OCEANS—Bergen, Bergen, Norway, 10–13 June 2013; pp. 1–9. [Google Scholar]
- Bongiorno, D.L.; Bryson, M.; Bridge, T.C.L.; Dansereau, D.G.; Williams, S.B. Coregistered hyperspectral and stereo image seafloor mapping from an autonomous underwater vehicle. J. Field Robot. 2018, 35, 312–329. [Google Scholar] [CrossRef]
- Torres-Mendez, L.A.; Dudek, G. A statistical learning-based method for color correction of underwater images. Res. Comput. Sci. 2005, 17, 151–160. [Google Scholar]
- Bryson, M.; Johnson-Roberson, M.; Pizarro, O.; Williams, S.B. Colour-consistent structure-from-motion models using underwater imagery. In Robotics: Science and Systems VIII; Roy, N., Newman, P., Srinivasa, S., Eds.; MIT Press: Cambridge, MA, USA, 2013. [Google Scholar]
- Margolis, S.; Burns, R. Pacific deep-sea manganese nodules—Their distribution, composition, and origin. Annu. Rev. Earth Planet. Sci. 1976, 4, 229–263. [Google Scholar] [CrossRef]
- Hein, J.R.; Koschinsk, A.; Bau, M.; Manheim, F.T.; Kang, J.-K.; Roberts, L. Cobalt-rich ferromanganese crusts in the Pacific. In Handbook of Marine Mineral Deposits; Cronan, D.S., Ed.; Routledge: Abingdon, UK, 2017; pp. 239–279. ISBN 978-0-203-75276-0. [Google Scholar]
- Herzig, P.M.; Hannington, M.D. Polymetallic massive sulfides at the modern seafloor—A review. Ore Geol. Rev. 1995, 10, 95–115. [Google Scholar] [CrossRef]
- Malehmir, A.; Bellefleur, G. 3D seismic reflection imaging of volcanic-hosted massive sulfide deposits: Insights from reprocessing Halfmile Lake data, New Brunswick, Canada. Geophysics 2009, 74, B209–B219. [Google Scholar] [CrossRef]
- Gehrmann, R.a.S.; North, L.J.; Graber, S.; Szitkar, F.; Petersen, S.; Minshull, T.A.; Murton, B.J. Marine mineral exploration with controlled source electromagnetics at the TAG hydrothermal field, 26 degrees N Mid-Atlantic Ridge. Geophys. Res. Lett. 2019, 46, 5808–5816. [Google Scholar] [CrossRef] [Green Version]
- Wong, L.J.; Kalyan, B.; Chitre, M.; Vishnu, H. Acoustic assessment of polymetallic nodule abundance using sidescan sonar and altimeter. IEEE J. Ocean. Eng. 2020, 1–11. [Google Scholar] [CrossRef]
- Schoening, T.; Jones, D.O.B.; Greinert, J. Compact-morphology-based polymetallic Nodule Delineation. Sci. Rep. 2017, 7, 13338. [Google Scholar] [CrossRef] [PubMed]
- White, S.N.; Dunk, R.M.; Peltzer, E.T.; Freeman, J.J.; Brewer, P.G. In situ Raman analyses of deep-sea hydrothermal and cold seep systems (Gorda Ridge and Hydrate Ridge). Geochem. Geophys. Geosyst. 2006, 7, Q05023. [Google Scholar] [CrossRef]
- Rajesh, H.M. Application of remote sensing and GIS in mineral resource mapping—An overview. J. Mineral. Petrol. Sci. 2004, 99, 83–103. [Google Scholar] [CrossRef] [Green Version]
- Sture, O.; Ludvigsen, M.; Soreide, F.; Aas, L.M.S. Autonomous Underwater Vehicles as a Platform for Underwater Hyperspectral Imaging. In Oceans 2017—Aberdeen; IEEE: New York, NY, USA, 2017; ISBN 978-1-5090-5278-3. [Google Scholar]
- Dumke, I.; Ludvigsen, M.; Ellefmo, S.L.; Soreide, F.; Johnsen, G.; Murton, B.J. Underwater hyperspectral imaging using a stationary platform in the Trans-Atlantic geotraverse hydrothermal field. IEEE Trans. Geosci. Remote Sens. 2019, 57, 2947–2962. [Google Scholar] [CrossRef] [Green Version]
- Sture, O.; Snook, B.; Ludvigsen, M. Obtaining hyperspectral signatures for seafloor massive sulphide exploration. Minerals 2019, 9, 694. [Google Scholar] [CrossRef] [Green Version]
- Bajjouk, T.; Mouquet, P.; Ropert, M.; Quod, J.-P.; Hoarau, L.; Bigot, L.; Le Dantec, N.; Delacourt, C.; Populus, J. Detection of changes in shallow coral reefs status: Towards a spatial approach using hyperspectral and multispectral data. Ecol. Indic. 2019, 96, 174–191. [Google Scholar] [CrossRef]
- Hossain, M.S.; Hashim, M. Potential of Earth Observation (EO) technologies for seagrass ecosystem service assessments. Int. J. Appl. Earth Obs. Geoinf. 2019, 77, 15–29. [Google Scholar] [CrossRef]
- Stauffer, B.A.; Bowers, H.A.; Buckley, E.; Davis, T.W.; Johengen, T.H.; Kudela, R.; McManus, M.A.; Purcell, H.; Smith, G.J.; Vander Woude, A.; et al. Considerations in harmful algal bloom research and monitoring: Perspectives from a consensus-building workshop and technology testing. Front. Mar. Sci. 2019, 6, 399. [Google Scholar] [CrossRef] [Green Version]
- Sture, O.; Ludvigsen, M.; Scheide, M.S.; Thorsnes, T. Recognition of Cold-Water Corals in Synthetic Aperture Sonar Imagery; IEEE: New York, NY, USA, 2018; ISBN 978-1-72810-253-5. [Google Scholar]
- Sheehan, E.V.; Stevens, T.F.; Attrill, M.J. A quantitative, non-destructive methodology for habitat characterisation and benthic monitoring at offshore renewable energy developments. PLoS ONE 2010, 5, e14461. [Google Scholar] [CrossRef] [Green Version]
- Holte, B.; Buhl-Mortensen, L. Does grab size influence sampled macrofauna composition? A test conducted on deep-sea communities in the northeast Atlantic. Mar. Environ. Res. 2020, 154, 104867. [Google Scholar] [CrossRef]
- Pettersen, R.; Johnsen, G.; Bruheim, P.; Andreassen, T. Development of hyperspectral imaging as a bio-optical taxonomic tool for pigmented marine organisms. Org. Divers Evol. 2014, 14, 237–246. [Google Scholar] [CrossRef]
- Mogstad, A.A.; Johnsen, G. Spectral characteristics of coralline algae: A multi-instrumental approach, with emphasis on underwater hyperspectral imaging. Appl. Opt. 2017, 56, 9957–9975. [Google Scholar] [CrossRef]
- Dumke, I.; Purser, A.; Marcon, Y.; Nornes, S.M.; Johnsen, G.; Ludvigsen, M.; Søreide, F. Underwater hyperspectral imaging as an in situ taxonomic tool for deep-sea megafauna. Sci. Rep. 2018, 8, 1–11. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Letnes, P.A.; Hansen, I.M.; Aas, L.M.S.; Eide, I.; Pettersen, R.; Tassara, L.; Receveur, J.; le Floch, S.; Guyomarch, J.; Camus, L.; et al. Underwater hyperspectral classification of deep sea corals exposed to 2-methylnaphthalene. PLoS ONE 2019, 14. [Google Scholar] [CrossRef] [Green Version]
- Mogstad, A.A.; Johnsen, G.; Ludvigsen, M. Shallow-water habitat mapping using underwater hyperspectral imaging from an unmanned surface vehicle: A pilot study. Remote Sens. 2019, 11, 685. [Google Scholar] [CrossRef]
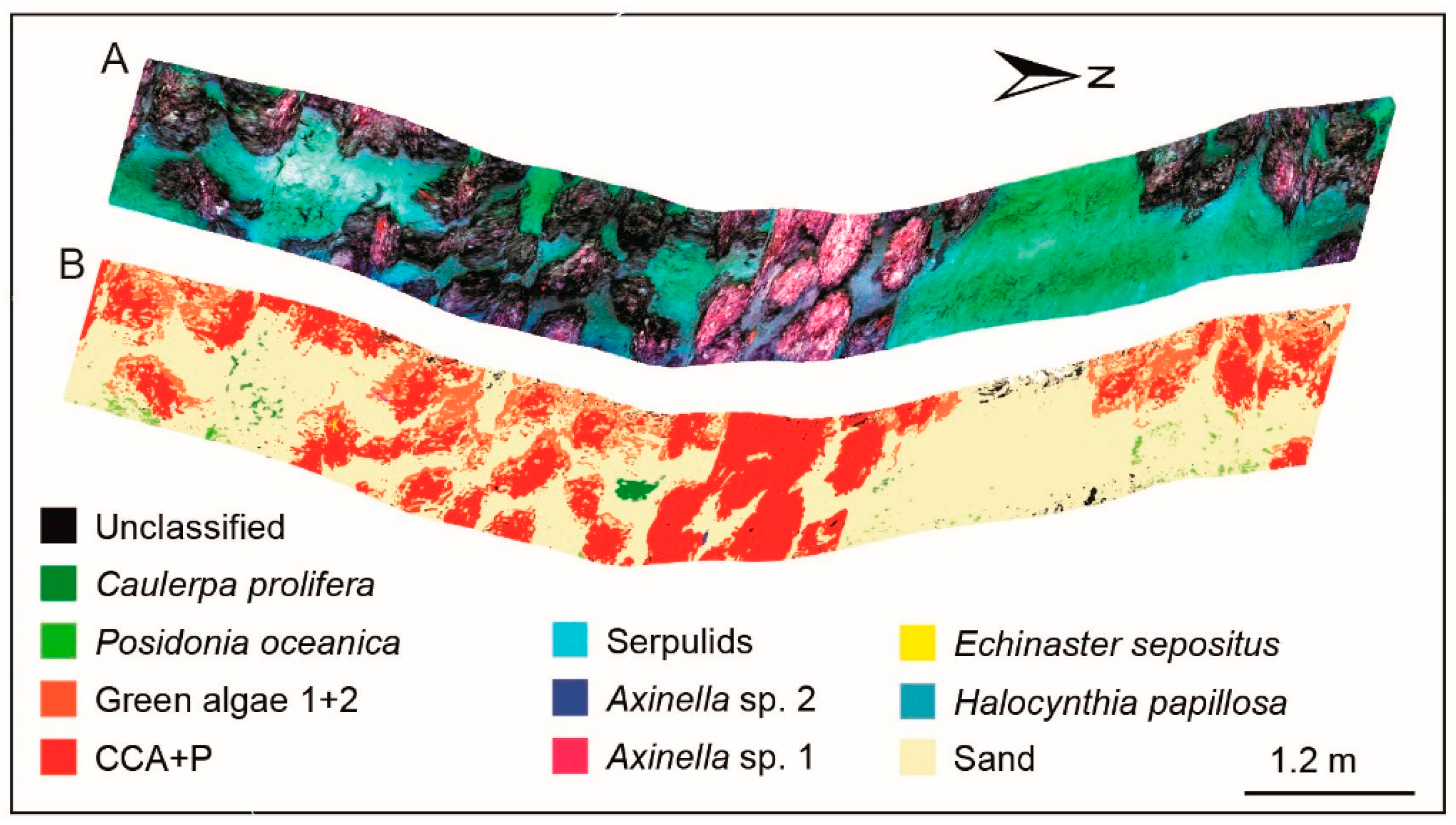
- Foglini, F.; Grande, V.; Marchese, F.; Bracchi, V.A.; Prampolini, M.; Angeletti, L.; Castellan, G.; Chimienti, G.; Hansen, I.M.; Gudmundsen, M.; et al. Application of hyperspectral imaging to underwater habitat mapping, Southern Adriatic Sea. Sensors 2019, 19, 2261. [Google Scholar] [CrossRef] [Green Version]
- Cimoli, E.; Meiners, K.M.; Lucieer, A.; Lucieer, V. An under-ice hyperspectral and RGB imaging system to capture fine-scale biophysical properties of sea ice. Remote Sens. 2019, 11, 2860. [Google Scholar] [CrossRef] [Green Version]
- Volent, Z.; Johnsen, G.; Sigernes, F. Microscopic hyperspectral imaging used as a bio-optical taxonomic tool for micro- and macroalgae. Appl. Opt. AO 2009, 48, 4170–4176. [Google Scholar] [CrossRef]
- Rashid, A.R.; Chennu, A. A trillion coral reef colors: Deeply annotated underwater hyperspectral images for automated classification and habitat mapping. Data 2020, 5, 19. [Google Scholar] [CrossRef] [Green Version]
- Danovaro, R. Ecological variables for developing a global deep-ocean monitoring and conservation strategy. Nat. Ecol. Evol. 2020, 4, 14. [Google Scholar] [CrossRef]
- Ødegård, Ø.; Sørensen, A.J.; Hansen, R.E.; Ludvigsen, M. A new method for underwater archaeological surveying using sensors and unmanned platforms. IFAC-PapersOnLine 2016, 49, 486–493. [Google Scholar] [CrossRef]
- Johnsen, G.; Ludvigsen, M.; Sorensen, A.; Aas, L.M.S. The use of underwater hyperspectral imaging deployed on remotely operated vehicles methods and applications. IFAC PapersOnLine 2016, 49, 476–481. [Google Scholar] [CrossRef]
- Cochrane, S.K.J.; Ekehaug, S.; Pettersen, R.; Refit, E.C.; Hansen, I.M.; Aas, L.M.S. Detection of deposited drill cuttings on the sea floor—A comparison between underwater hyperspectral imagery and the human eye. Mar. Pollut. Bull. 2019, 145, 67–80. [Google Scholar] [CrossRef] [PubMed]
- Hagen, N.; Kudenov, M.W. Review of snapshot spectral imaging technologies. Opt. Eng. 2013, 52, 090901. [Google Scholar] [CrossRef] [Green Version]
- Ludvigsen, M.; Johnsen, G.; Sorensen, A.J.; Lagstad, P.A.; Odegard, O. Scientific operations combining ROV and AUV in the Trondheim Fjord. Mar. Technol. Soc. J. 2014, 48, 59–71. [Google Scholar] [CrossRef]
- Ludvigsen, M.; Thorsnes, T.; Hansen, R.E.; Sorensen, A.J.; Johnsen, G.; Lagstad, P.A.; Odegard, O.; Candeloro, M.; Nornes, S.M.; Malmquist, C. Underwater vehicles for environmental management in coastal areas. In Proceedings of the IEEE OCEANS 2015—Genova, Genoa, Italy, 18–21 May 2015; pp. 1–6. [Google Scholar]
- Mogstad, A.A.; Ødegård, Ø.; Nornes, S.M.; Ludvigsen, M.; Johnsen, G.; Sørensen, A.J.; Berge, J. Mapping the historical shipwreck figaro in the high arctic using underwater sensor-carrying robots. Remote Sens. 2020, 12, 997. [Google Scholar] [CrossRef] [Green Version]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Developer | Spectral Range/Bands | Resolution | Spatial Imaging | Depth Rating |
|---|---|---|---|---|---|
| LUMIS | Zawada [29] | 460,522,582,678 nm/4 | 12.0–42.1 nm | 20 m | |
| UMSI | Wu et al. [31] | 400–700 nm/31 | 10 nm | Staring 2 | 50 m |
| TuLUMIS | Liu et al. [32] | 400–700 nm/8 | >10 nm | Staring | 2000 m |
| UHI OV 1 | Ecotone | 380–750 nm/150–200 | 2.2–5.5 nm | Push-broom 3 | 6000 m |
| U185 | Cubert Gmbh | 450–950 nm/125 | 8 nm@532 nm | Snapshot 4 | 5 m |
| WaterCam | Sphere Optics | 450–950 nm/138 | 8 nm@532 nm | Snapshot |
| Summary | Platforms | Materials | Methods | Reference |
|---|---|---|---|---|
| A comprehensive introduction to UHI, and observation and classification of objects placed manually on the seafloor by a UHI-carrying cart. | Underwater cart | Substrates, minerals, animals | Field | Johnsen et al. [24] (2013) |
| The first time a full-scale hyperspectral imager has been mounted on an autonomous underwater vehicle (AUV) for massive sulfide deposit mapping. | AUV | Sulfide deposits | Field | Sture et al. [72] (2017) |
| First underwater hyperspectral imaging in-situ survey of manganese nodules in the Peru Basin (SE Pacific Ocean) at about a 4195 m water depth. | ROV 1 | Manganese nodules | Field | Dumke et al. [25] (2018) |
| Mapping of the Trans-Atlantic Geotraverse (TAG) hydrothermal field by using UHI deployed on a stationary platform that classified several hydrothermal materials. | Lander | Hydrothermal materials | Field | Dumke et al. [73] (2019) |
| A methodology for calculating the reflectance and strategies for noise mitigation were proposed to recover spectral signatures for the classification of materials. | / | Massive sulfide deposits | Lab | Sture et al. [74] (2019) |
| Summary | Platforms | Areas | Objects | Methods | Reference |
|---|---|---|---|---|---|
| Study on the species-specific absorption and hyperspectral reflection signatures of marine organisms by pigment extraction. | / | / | Spoonworms, sponges | Lab | Petterson et al. [81] (2014) |
| The application of HyperDiver operated by a diver in the investigation of tropical coral reefs. | Diver | Shallow water | Benthic habitat | Field | Chennu et al. [36] (2017) |
| Spectral characteristics of coralline algae obtained by pigment extraction for habitat investigation. | ROV | Shallow water | Coralline algae | Lab, Field | Mogstad et al. [82] (2017) |
| UHI as a taxonomic tool for the in-situ observation of deep-sea megafauna. | ROV | Deep-sea | Deep-sea megafauna | Field | Dumke et al. [83] (2018) |
| Observation and classification of samples exposed to 2-methylnaphthalene to evaluate the ability of UHI in coral health monitoring. | / | / | Cold-water corals | Lab | Letnes et al. [84] (2019) |
| Feasibility study on an attempt of benthic habitat mapping by using UHI deployed on USV in shallow areas. | USV 1 | Shallow water | Benthic habitat | Field | Mogstad et al. [85] (2019) |
| Underwater habitat mapping of cold-water in the Mediterranean Sea based on spectral libraries of several objects. | ROV | Deep-sea | Cold-water coral habitat | Field | Foglini et al. [86] (2019) |
| Non-invasive inverted system with a particular perspective to observe ice algae and calculate the chlorophyll concentration. | Under-ice sled | Under-ice | Sea ice | Field | Cimoli et al. [87] (2019) |
| Type | Spectral Splitter | Spectral Resolution | Imaging Speed | Geometric Correction | Price |
|---|---|---|---|---|---|
| Push-broom | Prisms, gratings | High | High | Difficult | High |
| Staring | Filter wheel | Intermediate | Low | Easy | Low |
| LCTF | Intermediate | Low | Easy | Intermediate | |
| Tunable LED | Low | Intermediate | Easy | Low | |
| Snapshot | Prisms, gratings, filters | Low | High | Easy | High |
| Sensors | Technology | Range | Bathymetry | Imagery | Spatial Resolution | Price |
|---|---|---|---|---|---|---|
| MBS 1 | Acoustic | <11,000 m | √ | √ | Low | High |
| SSS 2 | Acoustic | <150 m | √ | √ | Intermediate | High |
| SAS 3 | Acoustic | <260 m | √ | √ | Intermediate | High |
| LiDAR | Optical | ~tens of meters | √ | × | / | High |
| Video | Optical | <10 m | × | √ | High | Low |
| Raman or LIBS | Optical | Very close | × | × | / | High |
| UHI | Optical | <10 m | × | √ | High | High |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, B.; Liu, Z.; Men, S.; Li, Y.; Ding, Z.; He, J.; Zhao, Z. Underwater Hyperspectral Imaging Technology and Its Applications for Detecting and Mapping the Seafloor: A Review. Sensors 2020, 20, 4962. https://doi.org/10.3390/s20174962
Liu B, Liu Z, Men S, Li Y, Ding Z, He J, Zhao Z. Underwater Hyperspectral Imaging Technology and Its Applications for Detecting and Mapping the Seafloor: A Review. Sensors. 2020; 20(17):4962. https://doi.org/10.3390/s20174962
Chicago/Turabian StyleLiu, Bohan, Zhaojun Liu, Shaojie Men, Yongfu Li, Zhongjun Ding, Jiahao He, and Zhigang Zhao. 2020. "Underwater Hyperspectral Imaging Technology and Its Applications for Detecting and Mapping the Seafloor: A Review" Sensors 20, no. 17: 4962. https://doi.org/10.3390/s20174962
APA StyleLiu, B., Liu, Z., Men, S., Li, Y., Ding, Z., He, J., & Zhao, Z. (2020). Underwater Hyperspectral Imaging Technology and Its Applications for Detecting and Mapping the Seafloor: A Review. Sensors, 20(17), 4962. https://doi.org/10.3390/s20174962