Adaptive optics (AO) is widely used in large astronomical telescopes for turbulence induced wavefront distortion compensation [
1]. Wavefront sensing is the key technology of AO, and researchers have done extensive research on wavefront sensing technologies. Traditional wavefront sensing technologies [
2,
3,
4,
5] include Shearing Interferometers (SI), Shack-Hartmann Wavefront Sensors (SHWFS), the curvature WFS, etc. SI has high measurement accuracy, but low light energy utilization and complicated optical path. SHWFS is widely used in AO systems, but limited by low spatial resolution due to its pupil segmentation mechanism. When compared to SHWFS and SI, the phase diversity (PD) method proposed in [
6] has a simpler optical path and no non-common optical path aberration [
7,
8]. However, due to high computational complexity, the PD method is mainly applied in the field of post-processing of blurred image and areas with lower real-time requirements [
9,
10].
Recently, with its rapid development, artificial intelligence has become a very powerful tool in various fields. Machine learning, including deep learning, has also become a hot topic in the field of optics and photonics [
11]. As early as 1994, Kendrick et al. [
12,
13] used neural network technology in the PD method, but there was no consideration of the real-time performance of the algorithm. Georges III et al. [
14] proposed a proof-of-concept phase-diversity wavefront sensing and control testbed that displayed
wave Root Mean Square accuracy, operated at an estimation rate of 100 Hz. Dolne et al. [
10] proposed an approach for real-time wavefront sensing and image enhancement that could process PD images at 50 to 200 Hz. Miyamura et al. [
15] also used a neural network to solve the complicated inverse problem of the PD method. Principal component analysis (PCA) is used for the preprocessing of the neural network to compress the information to reduce computation cost. In the last two years, machine learning has been increasingly applied to phase retrieval. Paine et al. [
16] used machine learning operating on a point-spread function in order to determine a good initial estimate of wavefront. The convolutional neural network (CNN) outputted a prediction in
s, while the nonlinear optimization took 16 seconds on average with a desktop computer. Ju et al. [
17] proposed a novel phase retrieval mechanism using machine learning that estimated aberration coefficients from Tchebichef moment features. This method is more robust, but still less accurate than traditional iterative phase recovery algorithms. Guo et al. [
18] proposed a phase-based sensing approach using machine learning, which can directly estimate the phase map from the point spread functions. With the same accuracy, the stochastic parallel gradient descent algorithm (SPGD) took 448 ms, while the phase-based sensing approach took 11 ms. Nishizak et al. [
19] experimentally demonstrated a variety of image-based wavefront sensing architectures that can directly estimate aberration coefficients from a single intensity image by using Xception network [
20]. This method still has a large aberration measurement error, and the estimation time was
ms for a single image. Andersen et al. [
21] used InceptionV3 to analyze both a focal image and a slightly defocused image. However, no experimental data were used to demonstrate the effectiveness in practical situations. Ma et al. [
22] proposed a novel wavefront compensation method based CNN that only require two intensity images detecting for each distorted wavefront compensation. However, there is also a degree of discrepancy between simulation and experiment. The average prediction time for the CNN after training was
s. Xin et al. [
23] proposed an image-based wavefront sensing approach while using the deep long short-term memory (LSTM), which is applicable to both point source and any extended scenes.
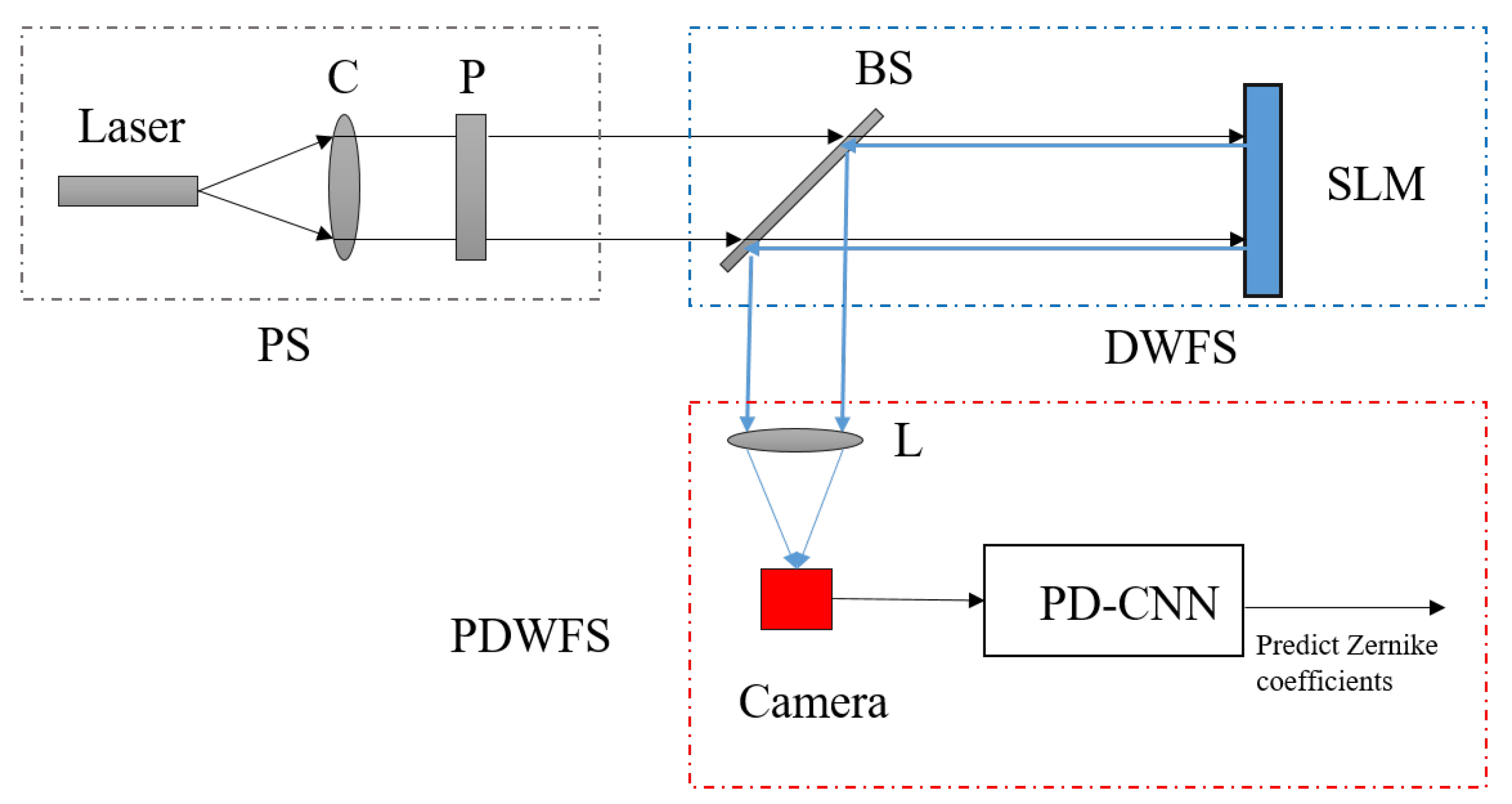
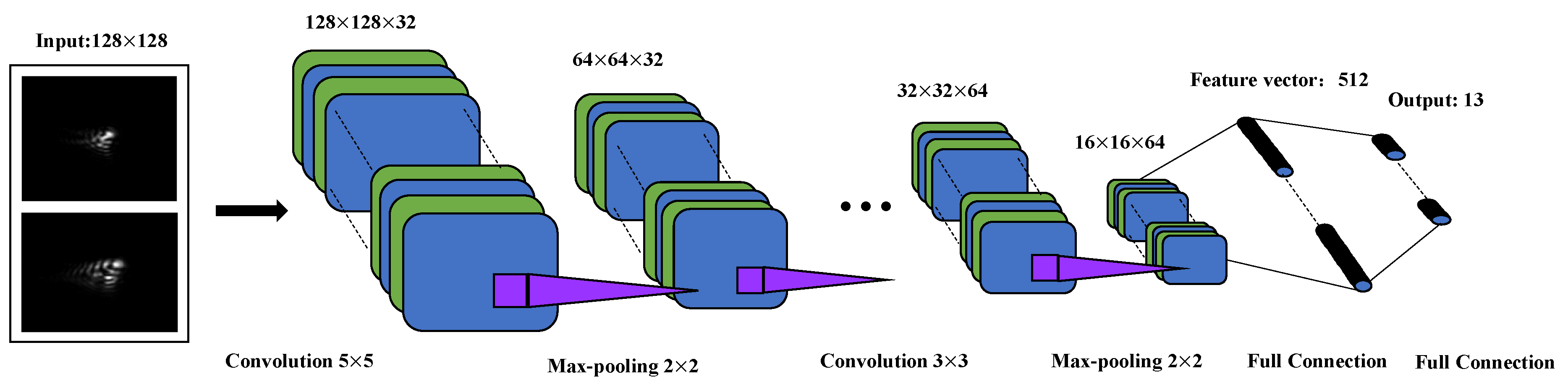
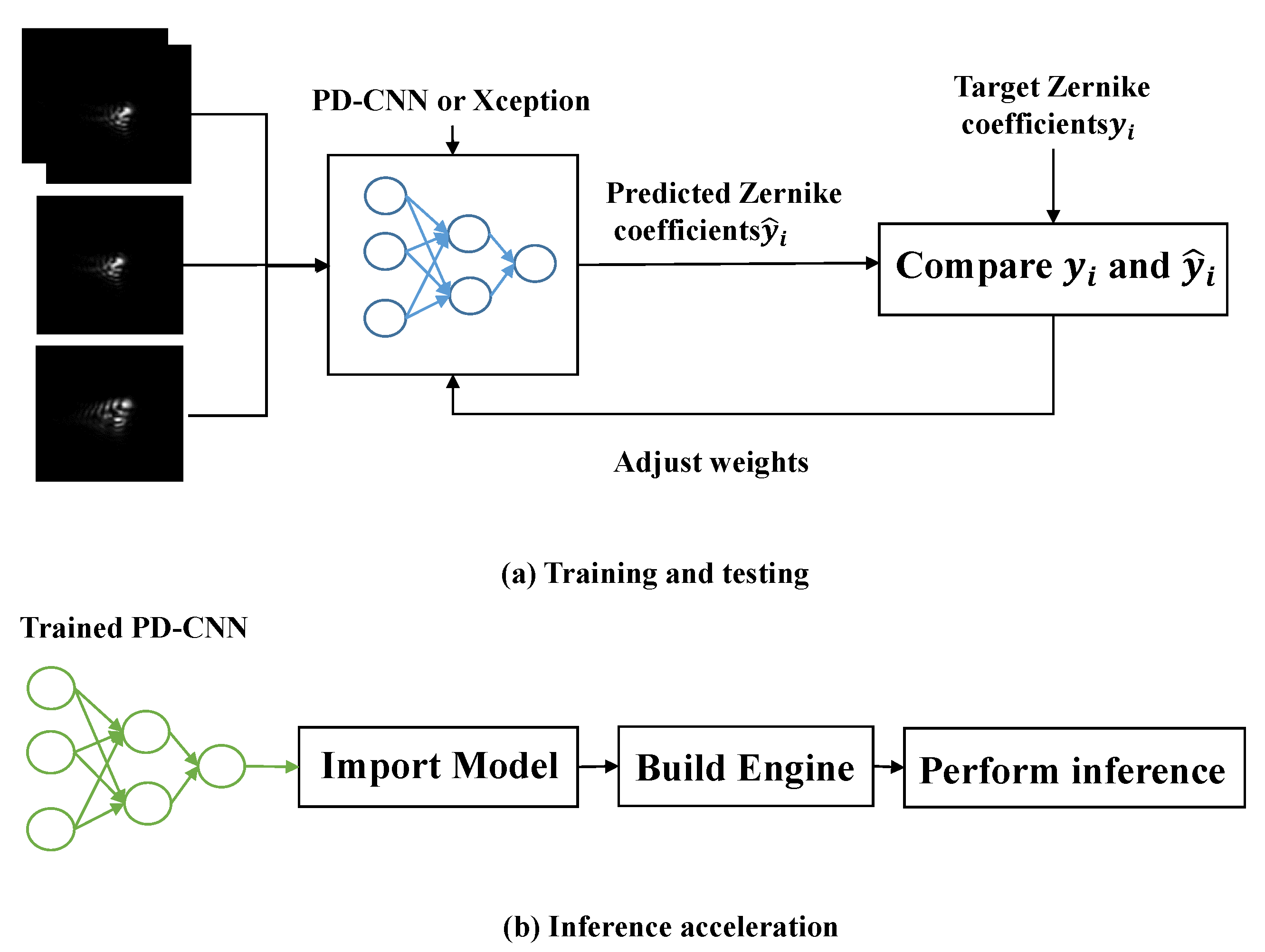
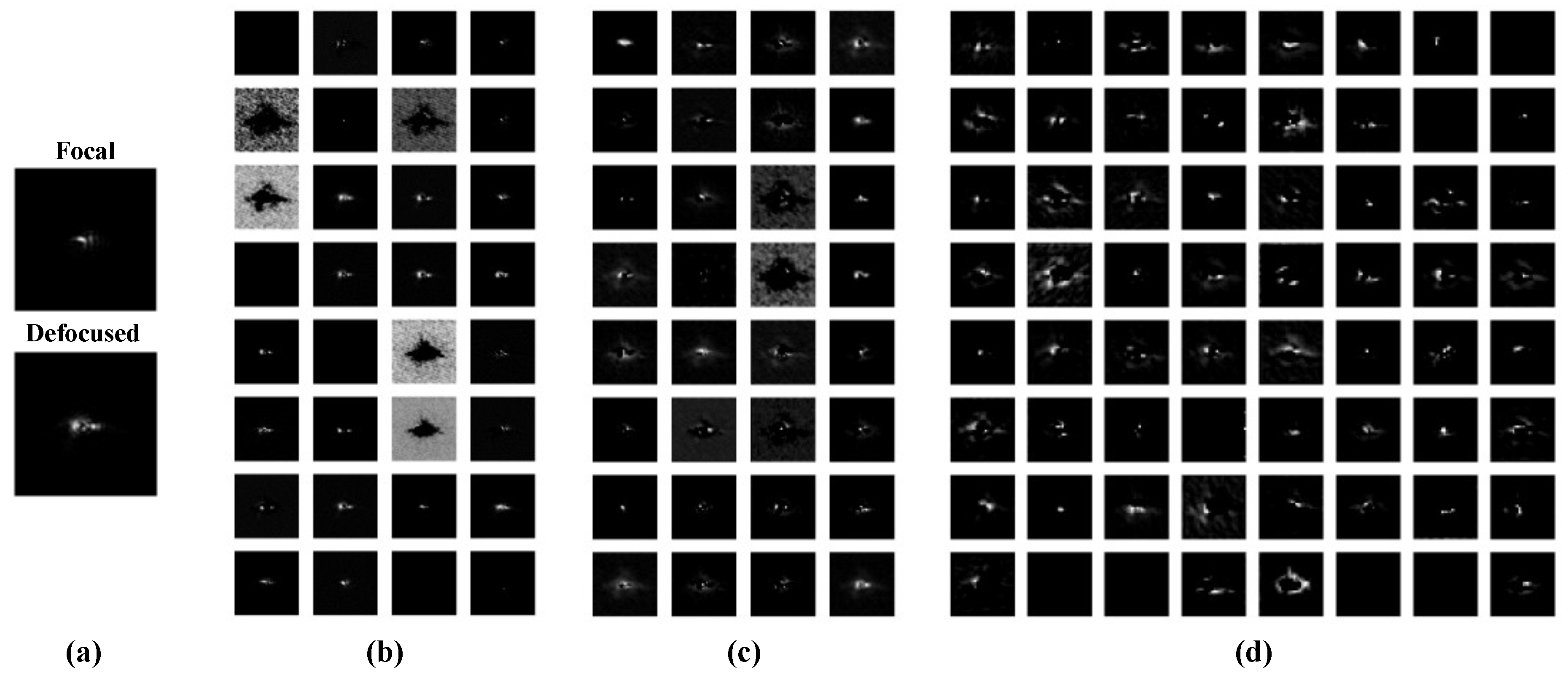
We propose a novel real-time non-iterative phase-diversity wavefront sensing that successfully establishes the nonlinear mapping between intensity images and the corresponding aberration coefficients by using phase diversity convolutional neural network (PD-CNN). We improve the real-time performance of the algorithm using TensorRT and reduce the aberration measurement error by fusing focal and defocused intensity images. After optimization, the PD-CNN proposed only needs about ms for the phase retrieval procedure. Experiments have been done to demonstrate the accuracy and speed of the proposed approach.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}