Arrival-Time Detection in Wind-Speed Measurement: Wavelet Transform and Bayesian Information Criteria


Abstract
1. Introduction
2. Method
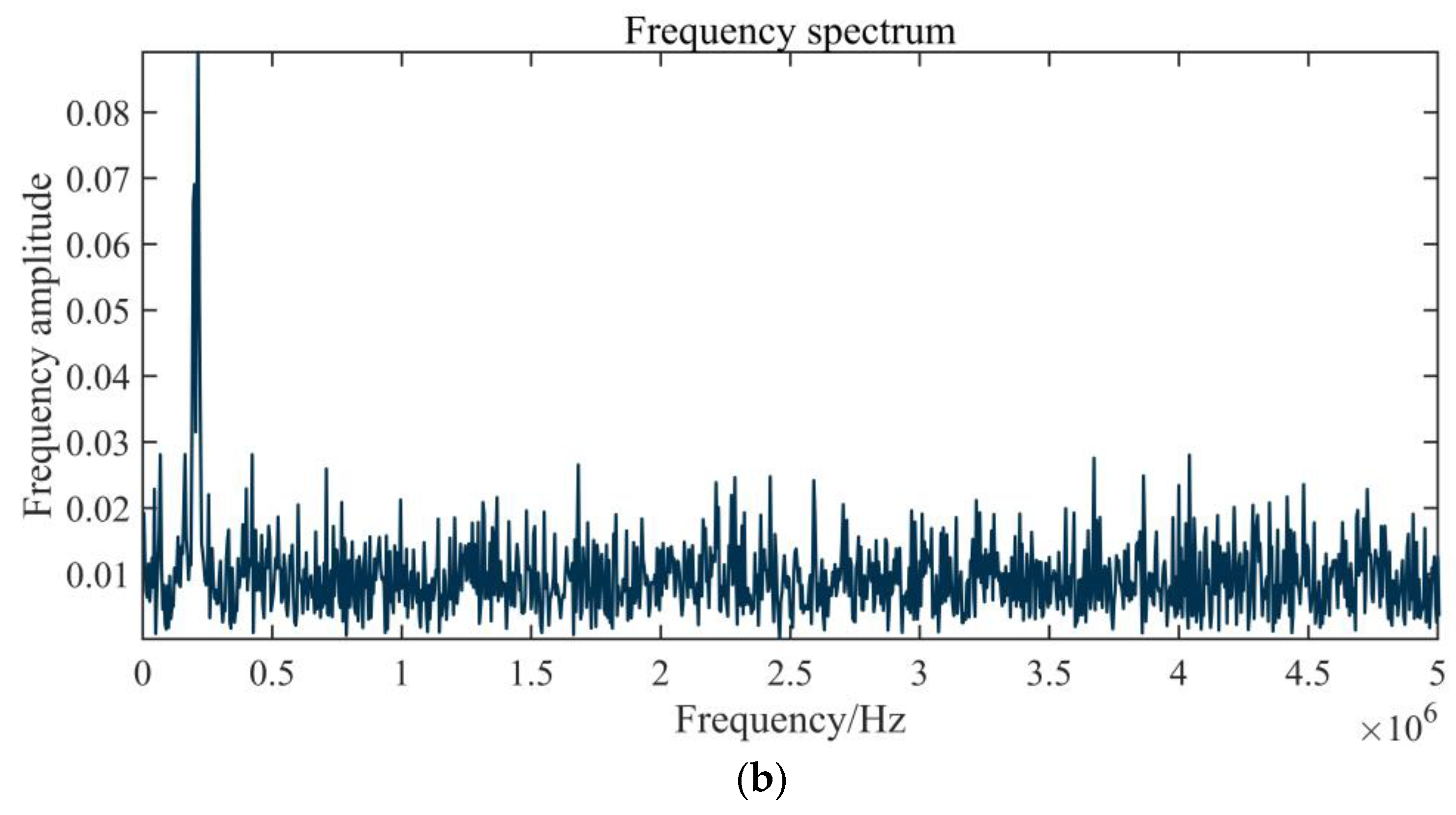
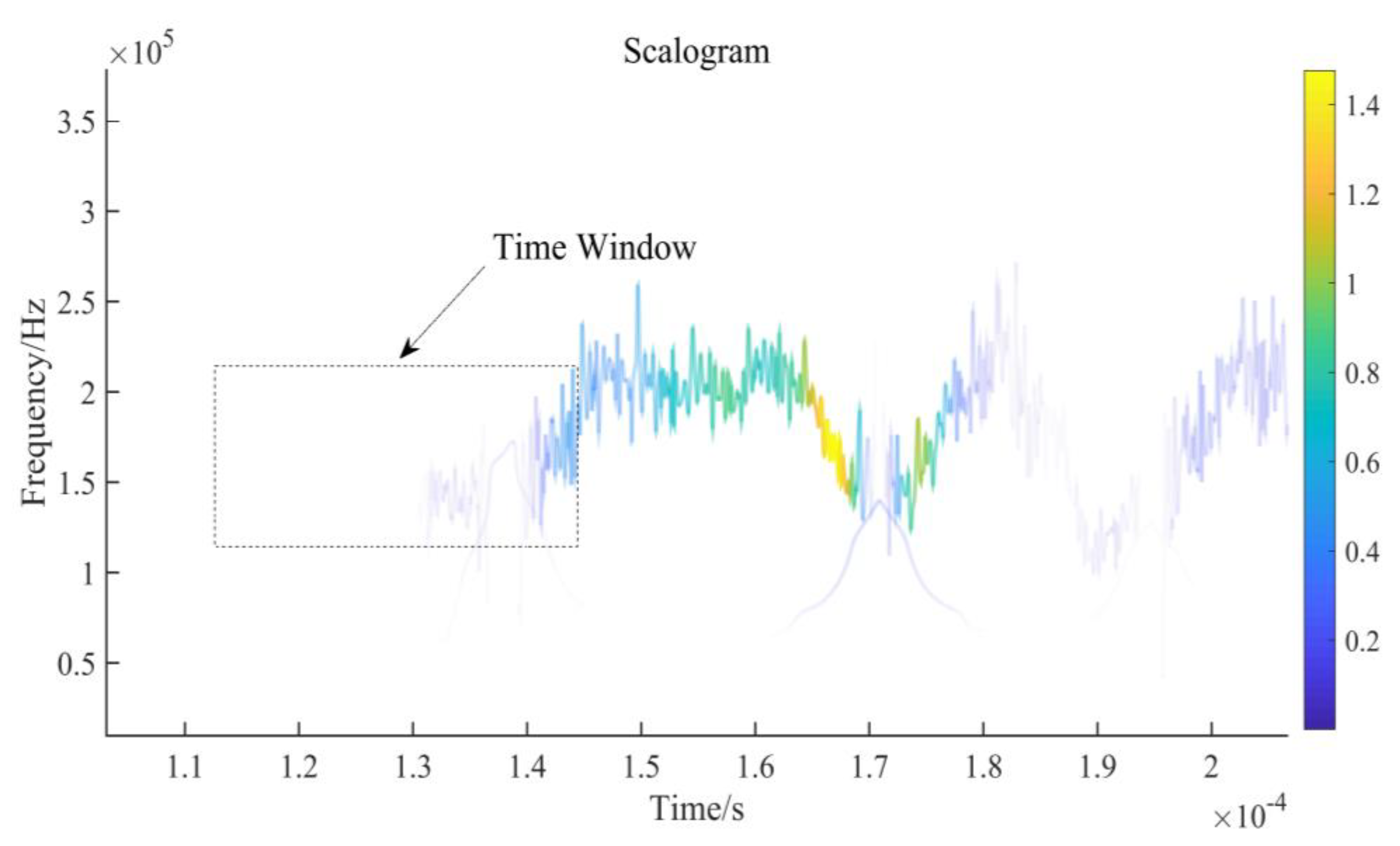
2.1. Time-Frequency Location Analysis
2.2. Accurate Arrival-Time Determination of Echo Signal Based on BIC
3. Experiments and Results
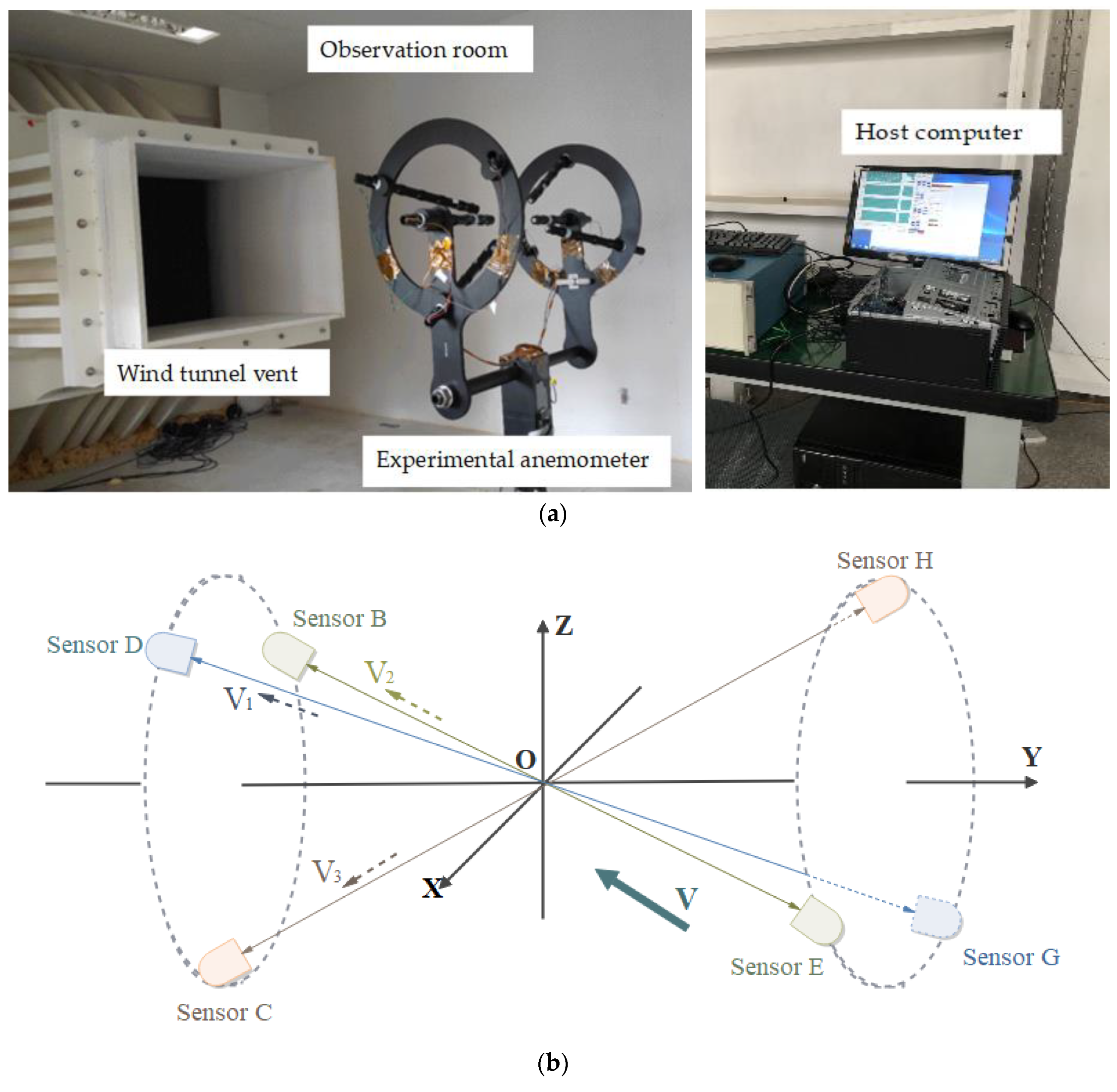
3.1. Experimental Platform
3.2. Performance under Different Signal-To-Noise Ratios
3.3. Stability and Accuracy Tests of Wind Speed in Wind Tunnel
3.4. Discussion of Results of Wind-Speed Tests
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Deaves, D.M.; Lines, I.G. On the fitting of low mean windspeed data to the Weibull distribution. J. Wind Eng. Ind. Aerodyn. 1997, 66, 169–178. [Google Scholar] [CrossRef]
- Broster, J.C.; Robertson, S.M.; Dehaan, R.L.; King, B.J.; Friend, M.A. Evaluating seasonal risk and the potential for windspeed reductions to reduce chill index at six locations using GrassGro. Anim. Prod. Sci. 2012, 52, 921–928. [Google Scholar] [CrossRef]
- Chiew, F.H.S.; Kamaladasa, N.N.; Malano, H.M.; Mcmahon, T.A. Penman-Monteith, FAO-24 reference crop evapotranspiration and class-A pan data in Australia. Agric. Water Manag. 1995, 28, 9–21. [Google Scholar] [CrossRef]
- Tabler, R.D. Visibility in Blowing Snow and Applications in Traffic Operations. Transp. Res. Board Spec. Rep. 1979, 185, 208–214. [Google Scholar]
- Tarade, R.S.; Katti, P.K. A comparative analysis for wind speed prediction. In Proceedings of the 2011 International Conference on Energy, Automation and Signal, Bhubaneswar, Odisha, India, 28–30 December 2011. [Google Scholar]
- Morel, T. Comprehensive Design of Axisymmetric Wind Tunnel Contractions. J. Fluids Eng. 1975, 97, 225–233. [Google Scholar] [CrossRef]
- Hyson, P. Cup Anemometer Response to Fluctuating Wind Speeds. J. Appl. Meteorol. 1972, 11, 843–848. [Google Scholar] [CrossRef]
- Zhu, Y.; Chen, B.; Qin, M.; Huang, Q.A. 2-D Micromachined Thermal Wind Sensors—A Review. IEEE Internet Things J. 2017, 1, 216–232. [Google Scholar] [CrossRef]
- Shi, W.; Wei, S. Comparison between Pitot Tube and Hot-wire Anemometer in Slow Periodic Flows. J. Exp. Mech. 1992, 7, 377–381. [Google Scholar]
- Bucci, G.; Ciancetta, F.; Fiorucci, E.; Gallo, D.; Luiso, M. A low-cost ultrasonic wind speed and direction measurement system. In Proceedings of the Instrumentation & Measurement Technology Conference, Minneapolis, MN, USA, 6–9 May 2013. [Google Scholar]
- Lopes, G.M.G.; Junior, D.P.D.S.; Franca, J.A.D.; Franca, M.B.D.M.; Ribeiro, L.D.S.; Moreira, M.; Elias, P. Development of 3-D Ultrasonic Anemometer with Nonorthogonal Geometry for the Determination of High-Intensity Winds. IEEE Trans. Instrum. Meas. 2017, 66, 2836–2844. [Google Scholar] [CrossRef]
- Wang, H.; Tao, G.; Shang, X.F. Understanding acoustic methods for cement bond logging. J. Acoust. Soc. Am. 2016, 139, 2407–2416. [Google Scholar] [CrossRef]
- Villanueva, J.M.M.; Catunda, S.Y.C.; Tanscheit, R. Maximum-Likelihood Data Fusion of Phase-Difference and Threshold-Detection Techniques for Wind-Speed Measurement. IEEE Trans. Instrum. Meas. 2009, 58, 2189–2195. [Google Scholar] [CrossRef]
- Tamura, Y.; Suda, K.; Sasaki, A.; Iwatani, Y.; Fujii, K.; Ishibashi, R.; Hibi, K. Simultaneous measurements of wind speed profiles at two sites using Doppler sodars. J. Wind Eng. Ind. Aerodyn. 2001, 89, 325–335. [Google Scholar] [CrossRef]
- Kang, J.W.; Chu, Y.B.; Feng, H.B. Study on Ultrasonic Anemometer Measurement System Based on ARM. Instrum. Tech. Sens. 2012, 12, 67–69. [Google Scholar]
- Li, X.; Sun, H.; Gao, W.; Shi, Y.; Liu, G.; Wu, Y. Wind speed and direction measurement based on arc ultrasonic sensor array signal processing algorithm. ISA Trans. 2016, 65, 437–444. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Wang, B.; Wu, Y. Time-difference Ultrasonic Wind Detection Methods Based on Cross-correlation Theory. In Proceedings of the International Conference on Electronic Measurement & Instruments, Xi’an, China, 16–18 August 2007. [Google Scholar]
- Konishi, S.; Kitagawa, G. Bayesian Information Criteria. In Information Criteria and Statistical Modeling; Springer: New York, NY, USA, 2008; pp. 211–237. [Google Scholar]
- Khaldi, K.; Boudraa, A.O.; Komaty, A. Speech enhancement using empirical mode decomposition and the Teager-Kaiser energy operator. J. Acoust. Soc. Am. 2014, 135, 451–459. [Google Scholar] [CrossRef] [PubMed]
- Kurz, J.H.; Grosse, C.U.; Reinhardt, H.W. Strategies for reliable automatic onset time picking of acoustic emissions and of ultrasound signals in concrete. Ultrasonics 2005, 43, 538–546. [Google Scholar] [CrossRef] [PubMed]
- Liu, M.; Yang, J.; Cao, Y.; Fu, W.; Cao, Y. A new method for arrival time determination of impact signal based on HHT and AIC. Mech. Syst. Signal Process. 2017, 86, 177–187. [Google Scholar] [CrossRef]
- Kirbas, I.; Peker, M. Signal detection based on empirical mode decomposition and Teager–Kaiser energy operator and its application to P and S wave arrival time detection in seismic signal analysis. Neural Comput. Appl. 2016, 28, 3035–3045. [Google Scholar] [CrossRef]
- Li, H.; Manjunath, B.S.; Mitra, S.K. Multisensor Image Fusion Using the Wavelet Transform. Graph. Models Image Process. 1995, 57, 235–245. [Google Scholar] [CrossRef]
- Sinha, S.; Routh, P.S.; Anno, P.D.; Castagna, J.P. Spectral decomposition of seismic data with continuous-wavelet transform. Geophysics 2008, 70, P19–P25. [Google Scholar] [CrossRef]
- Zhang, B.L.; Lv, J.; Li, J.R. A Compound Algorithm for Parameter Estimation of Frequency Hopping Signal Based on STFT and Morlet Wavelet Transform. In International Conference on Intelligent Computing; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Morlet, J. Sampling Theory and Wave Propagation. In Issues in Acoustic Signal—Image Processing and Recognition; Springer: Berlin/Heidelberg, Germany, 1983. [Google Scholar]
- Kronlandmartinet, R.; Morlet, J.; Grossmann, A. Analysis of sound patterns through wavelet transforms. Int. J. Pattern Recognit. Artif. Intell. 1987, 1, 273–302. [Google Scholar] [CrossRef]
- Burnham, K.P.; Anderson, D.R. Multimodel Inference Understanding AIC and BIC in Model Selection. Sociol. Methods Res. 2004, 33, 261–304. [Google Scholar] [CrossRef]
- Mousavi, S.R.; Niknazar, M.; Vahdat, B.V. Epileptic Seizure Detection using AR Model on EEG Signals. In Proceedings of the International Biomedical Engineering Conference, Cairo, Egypt, 18–20 December 2008. [Google Scholar]
- Leonard, M.; Kennett, B.L.N. Multi-component autoregressive techniques for the analysis of seismograms. Phys. Earth Planet. Inter. 1999, 113, 247–263. [Google Scholar] [CrossRef]
- Sullivan, E.J. Statistical Signal Processing; Addison-Wesley: Reading, MA, USA, 2011; Volume 5, pp. 1695–1721. [Google Scholar]
- He, J.; Jones, J.W.; Graham, W.D.; Dukes, M.D. Influence of likelihood function choice for estimating crop model parameters using the generalized likelihood uncertainty estimation method. Agric. Syst. 2010, 103, 256–264. [Google Scholar] [CrossRef]
- Juang, B.H.; Rahim, M.G. Signal bias removal by maximum likelihood estimation for robust telephone speech recognition. IEEE Trans. Speech Audio Process. 1996, 4, 19. [Google Scholar] [CrossRef]
- Posada, D.; Buckley, T.R. Model selection and model averaging in phylogenetics: Advantages of akaike information criterion and bayesian approaches over likelihood ratio tests. Syst. Biol. 2004, 53, 793–808. [Google Scholar] [CrossRef]
- Knight, I.K. The Design and Construction of a Vertical Wind Tunnel for the Study of Untethered Firebrands in Flight. Fire Technol. 2001, 37, 87–100. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wind Speed in Wind Tunnel (m/s) | Mean Measured Value (m/s) | Standard Deviation (m/s) |
|---|---|---|
| 0 | 0.07 | 0.03 |
| 10 | 10.15 | 0.09 |
| 15 | 15.06 | 0.16 |
| 20 | 20.16 | 0.19 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Li, Z.; Gao, X.; Li, Y.; Shi, Y. Arrival-Time Detection in Wind-Speed Measurement: Wavelet Transform and Bayesian Information Criteria. Sensors 2020, 20, 269. https://doi.org/10.3390/s20010269
Zhang W, Li Z, Gao X, Li Y, Shi Y. Arrival-Time Detection in Wind-Speed Measurement: Wavelet Transform and Bayesian Information Criteria. Sensors. 2020; 20(1):269. https://doi.org/10.3390/s20010269
Chicago/Turabian StyleZhang, Wei, Zhipeng Li, Xuyang Gao, Yanjun Li, and Yibing Shi. 2020. "Arrival-Time Detection in Wind-Speed Measurement: Wavelet Transform and Bayesian Information Criteria" Sensors 20, no. 1: 269. https://doi.org/10.3390/s20010269
APA StyleZhang, W., Li, Z., Gao, X., Li, Y., & Shi, Y. (2020). Arrival-Time Detection in Wind-Speed Measurement: Wavelet Transform and Bayesian Information Criteria. Sensors, 20(1), 269. https://doi.org/10.3390/s20010269