Development of a Smart Helmet for Strategical BCI Applications

Abstract
1. Introduction
2. Materials and Methods
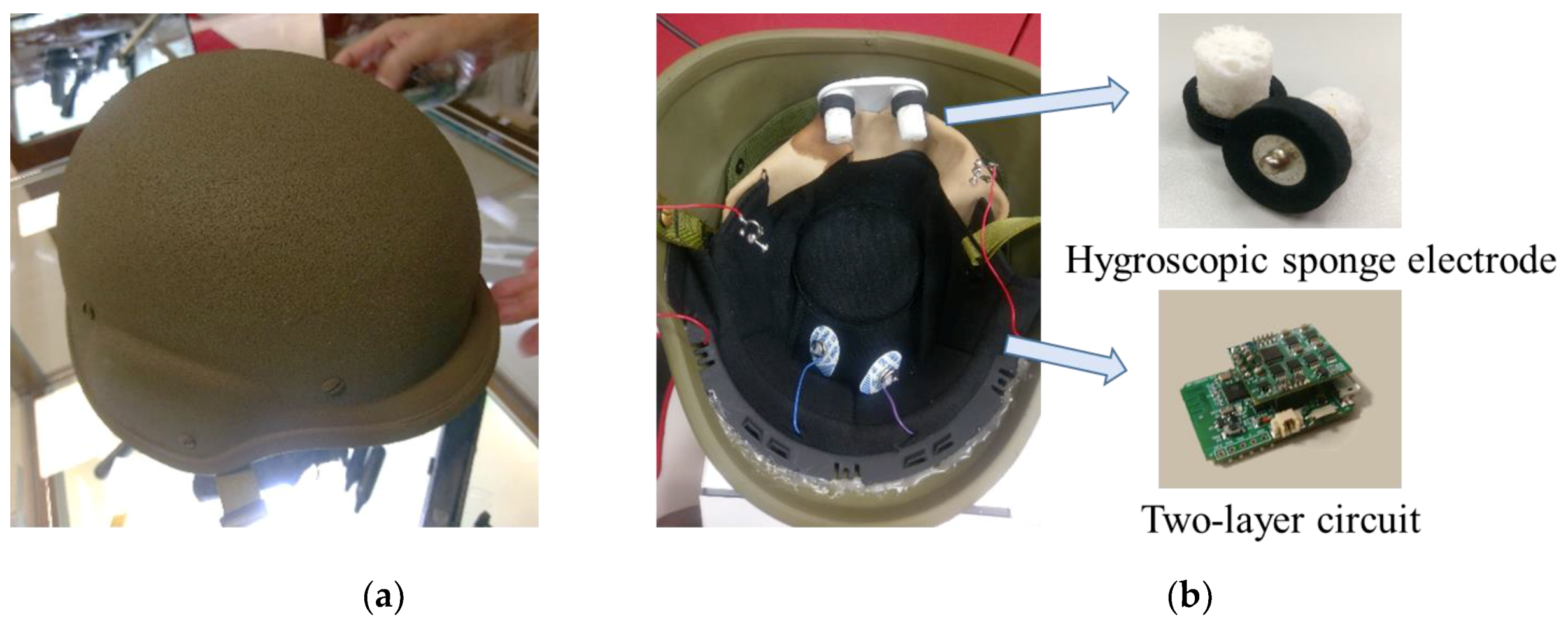
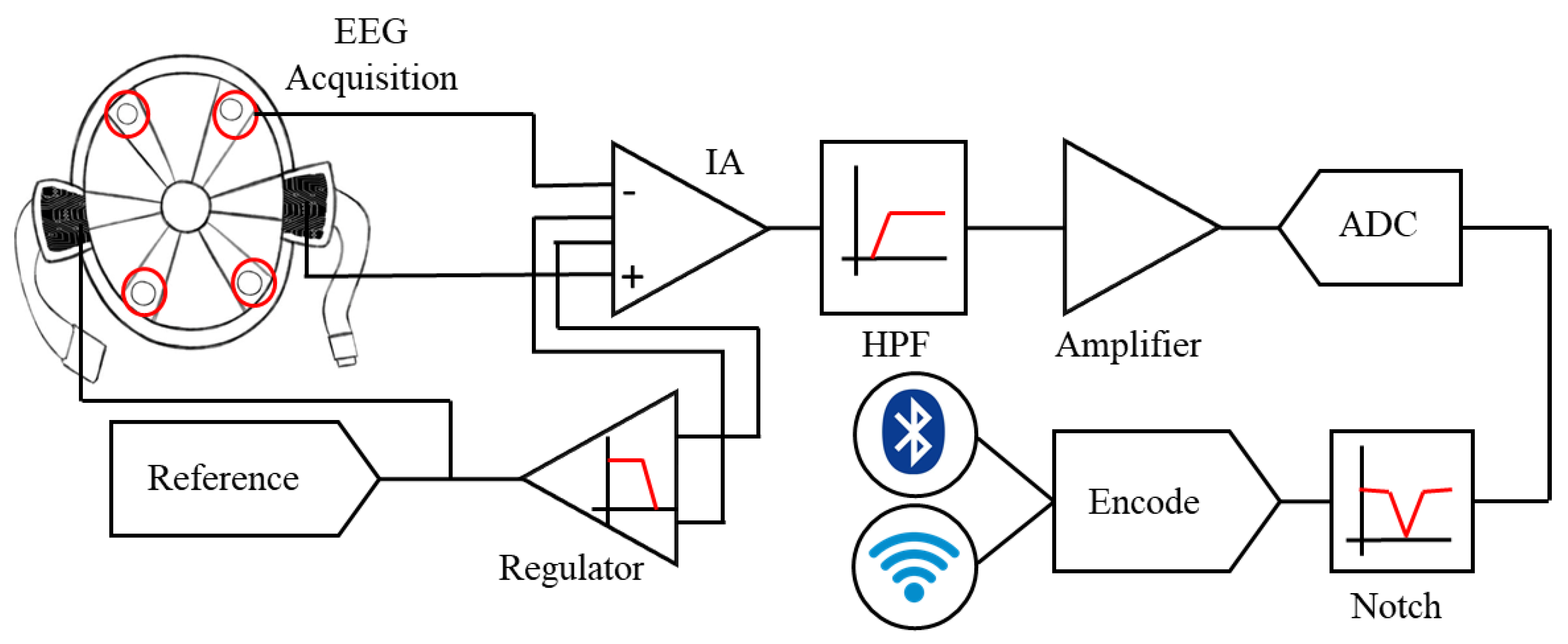
2.1. Development of the Smart Helmet
2.2. Development of Hygroscopic Sponge Electrodes
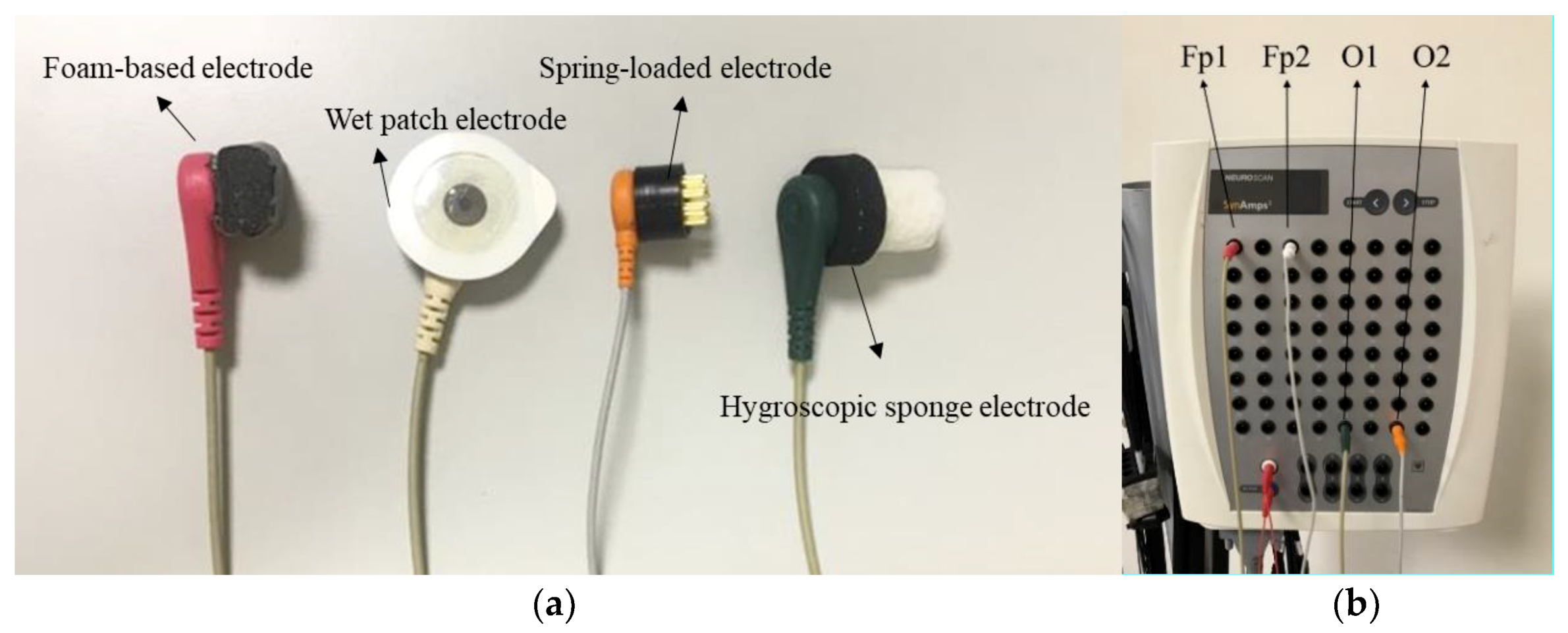
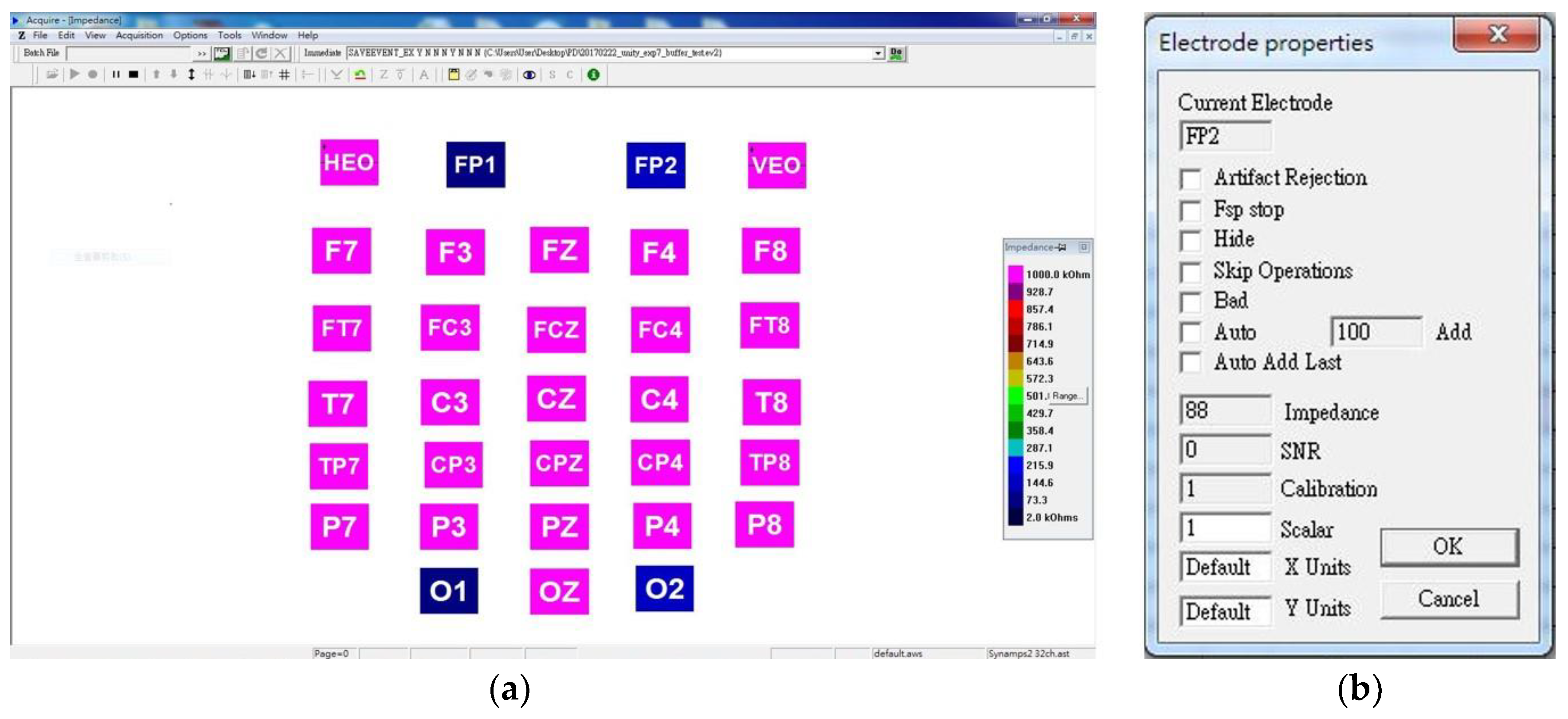
2.3. Experimental Design for Impedance Test of a Variety of Electrodes
2.3.1. Subjects
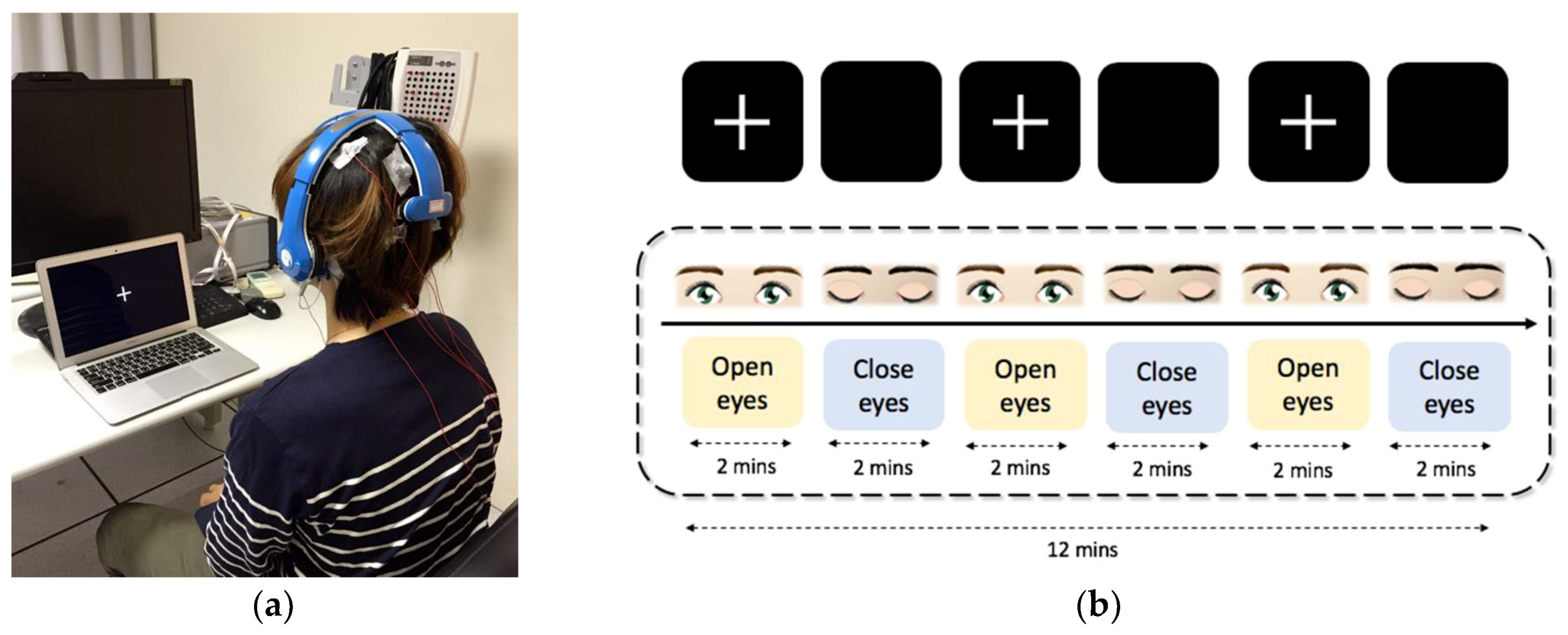
2.3.2. Experimental Paradigm of Impedance Test
2.4. Experimental Design for Impedance Test of a Variety of Positions
2.4.1. Subjects
2.4.2. Experimental Paradigm of Impedance Test
2.5. Experimental Design for Signal Validation
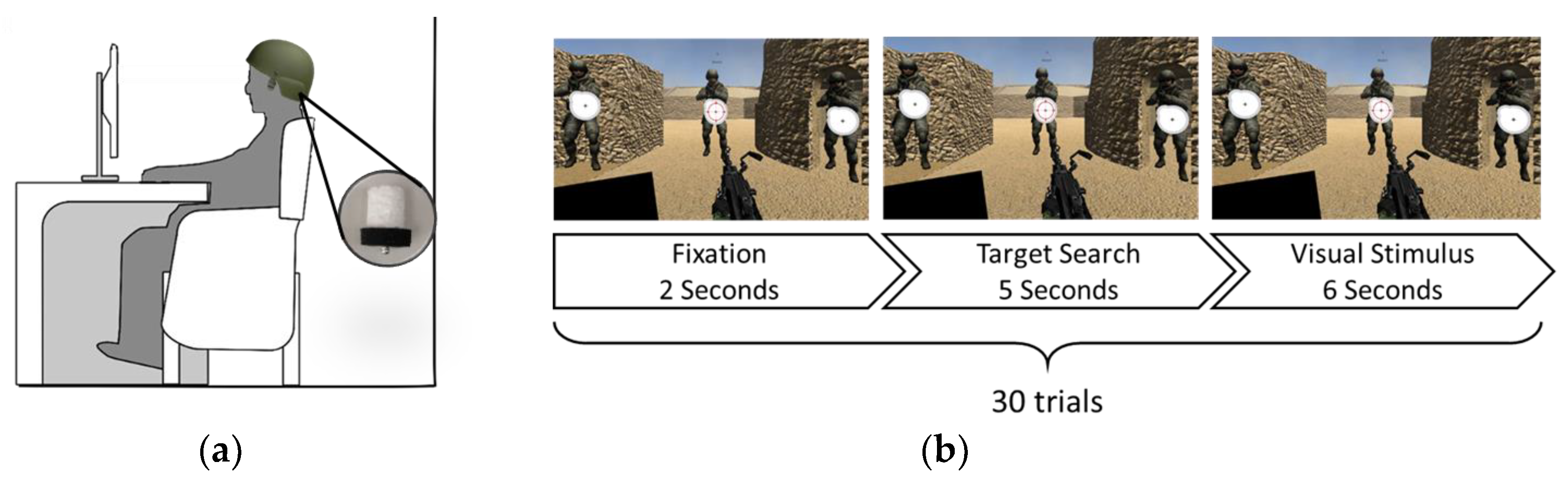
2.6. Experimental Design for a Simulated Military Mission
2.6.1. Subjects
2.6.2. Algorithm
2.6.3. Experimental Paradigm of BCI Application
3. Results
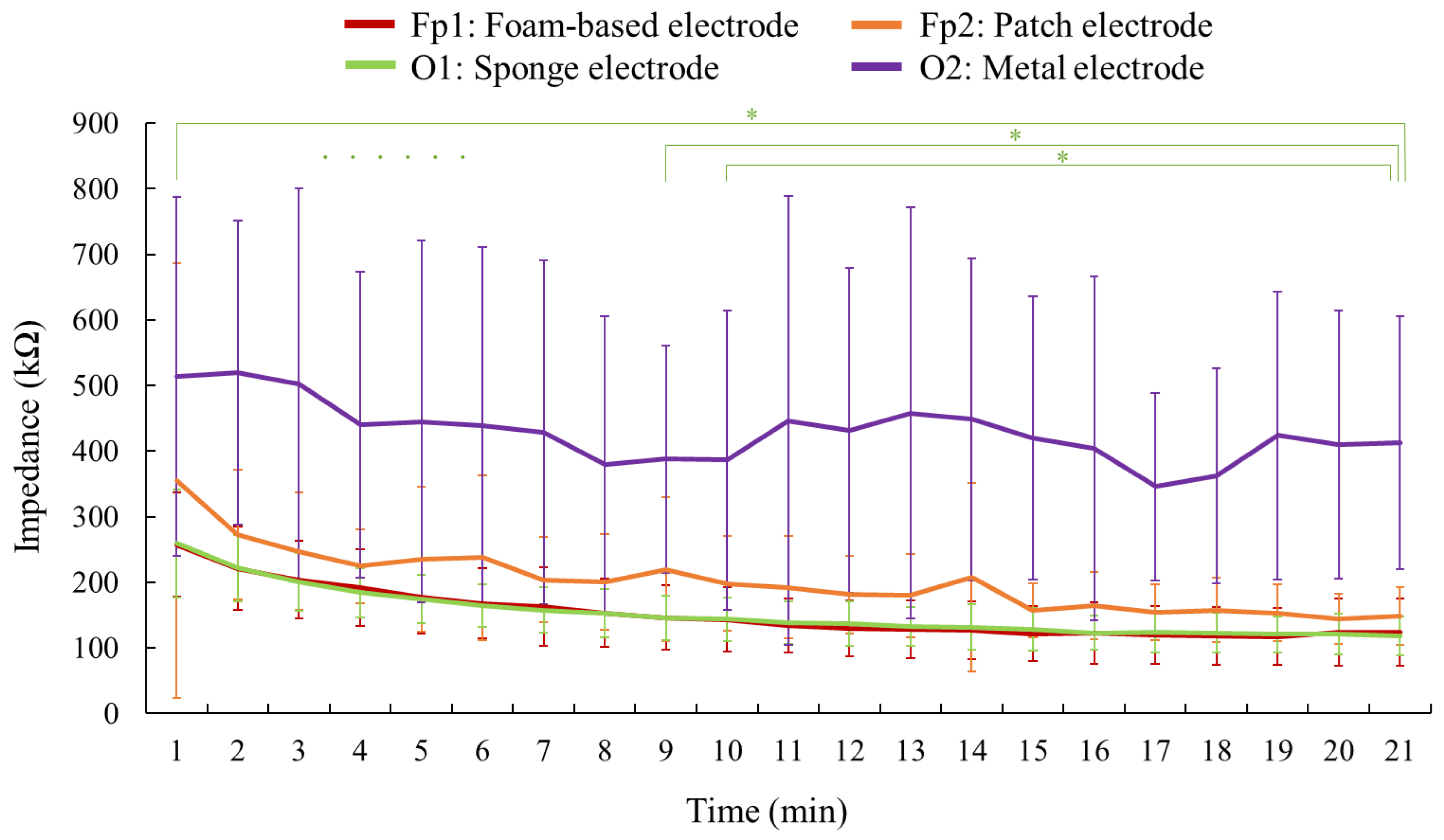
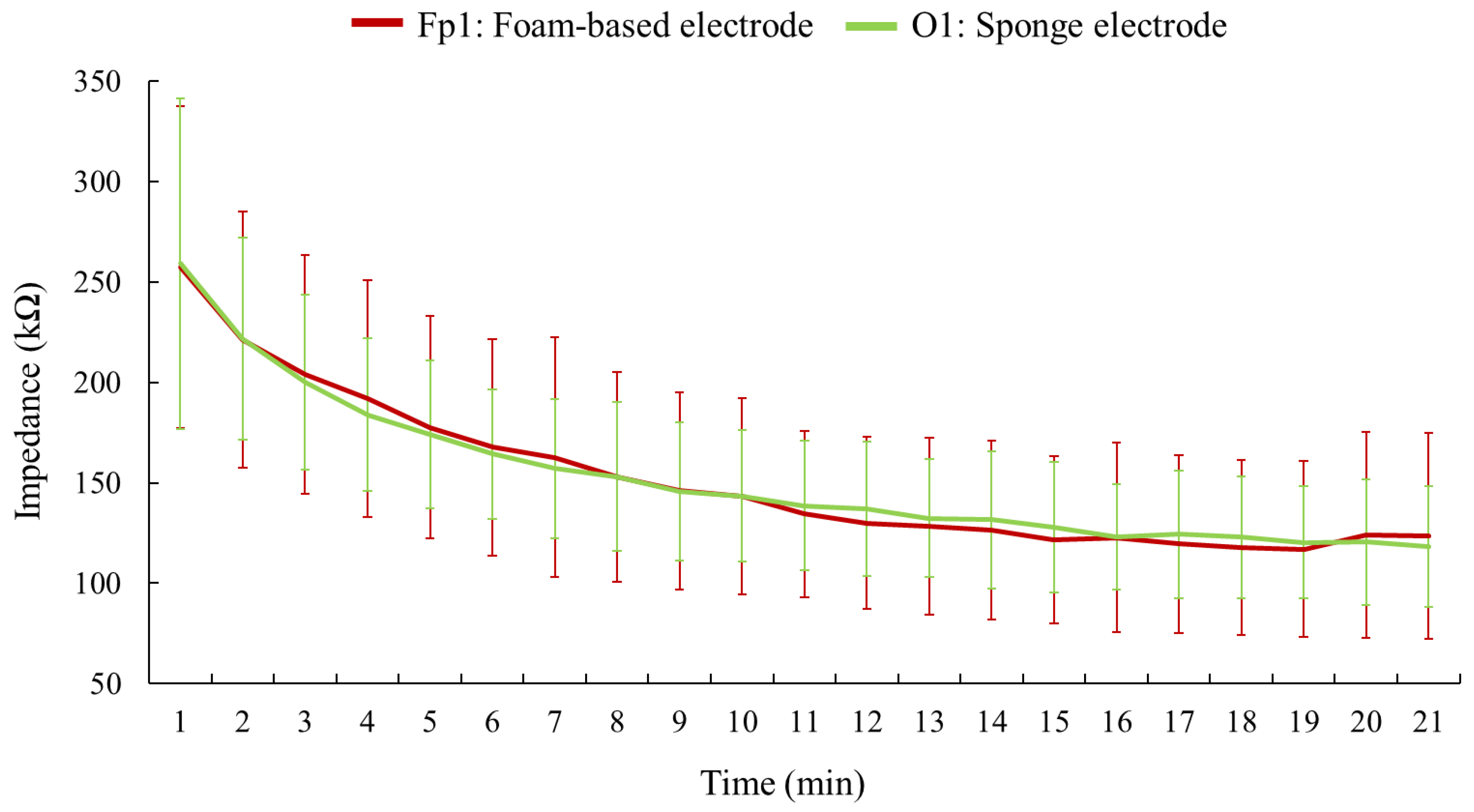
3.1. Impedance Testing Results
3.1.1. Variety of Electrodes
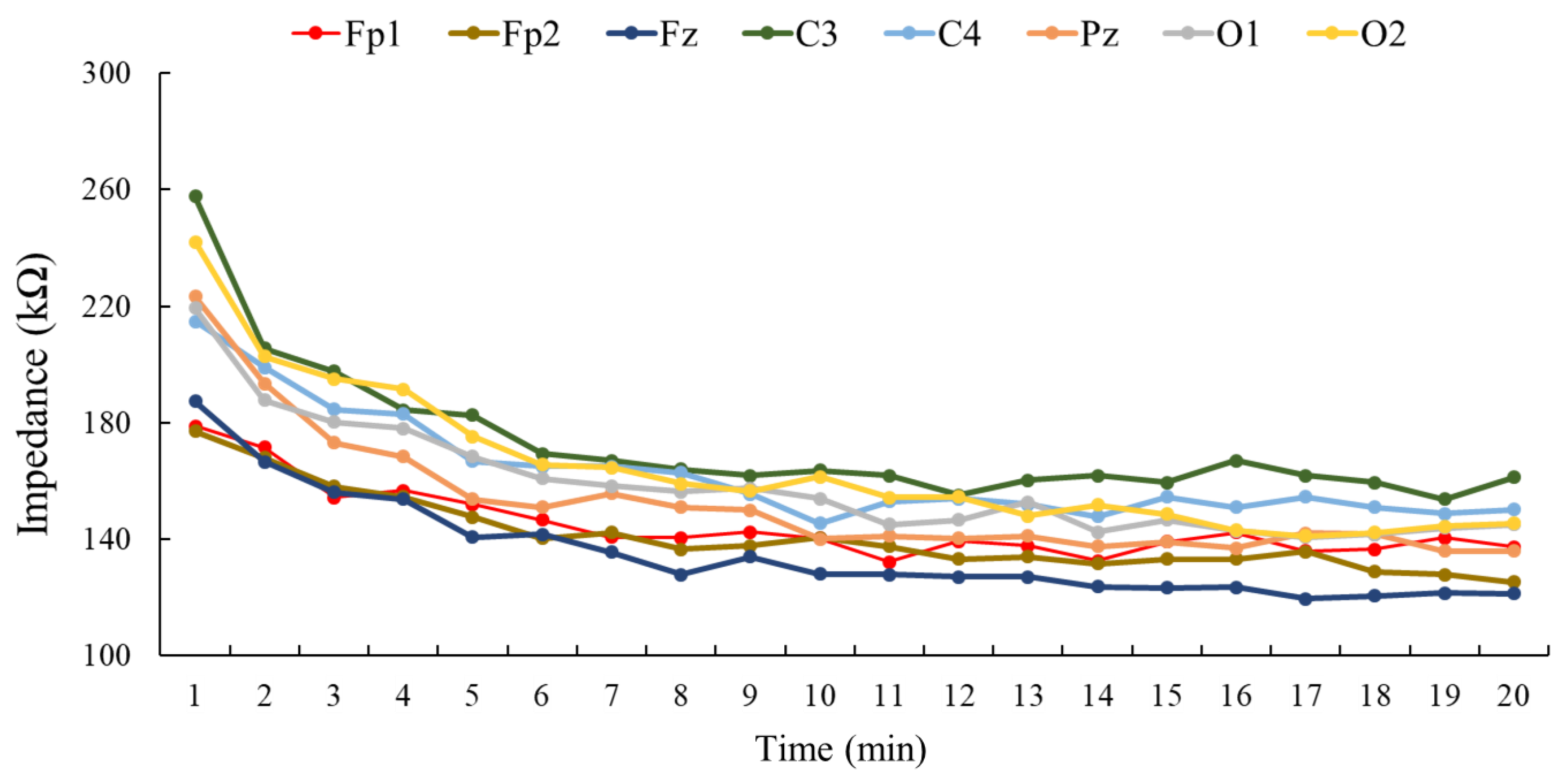
3.1.2. Variety of Positions
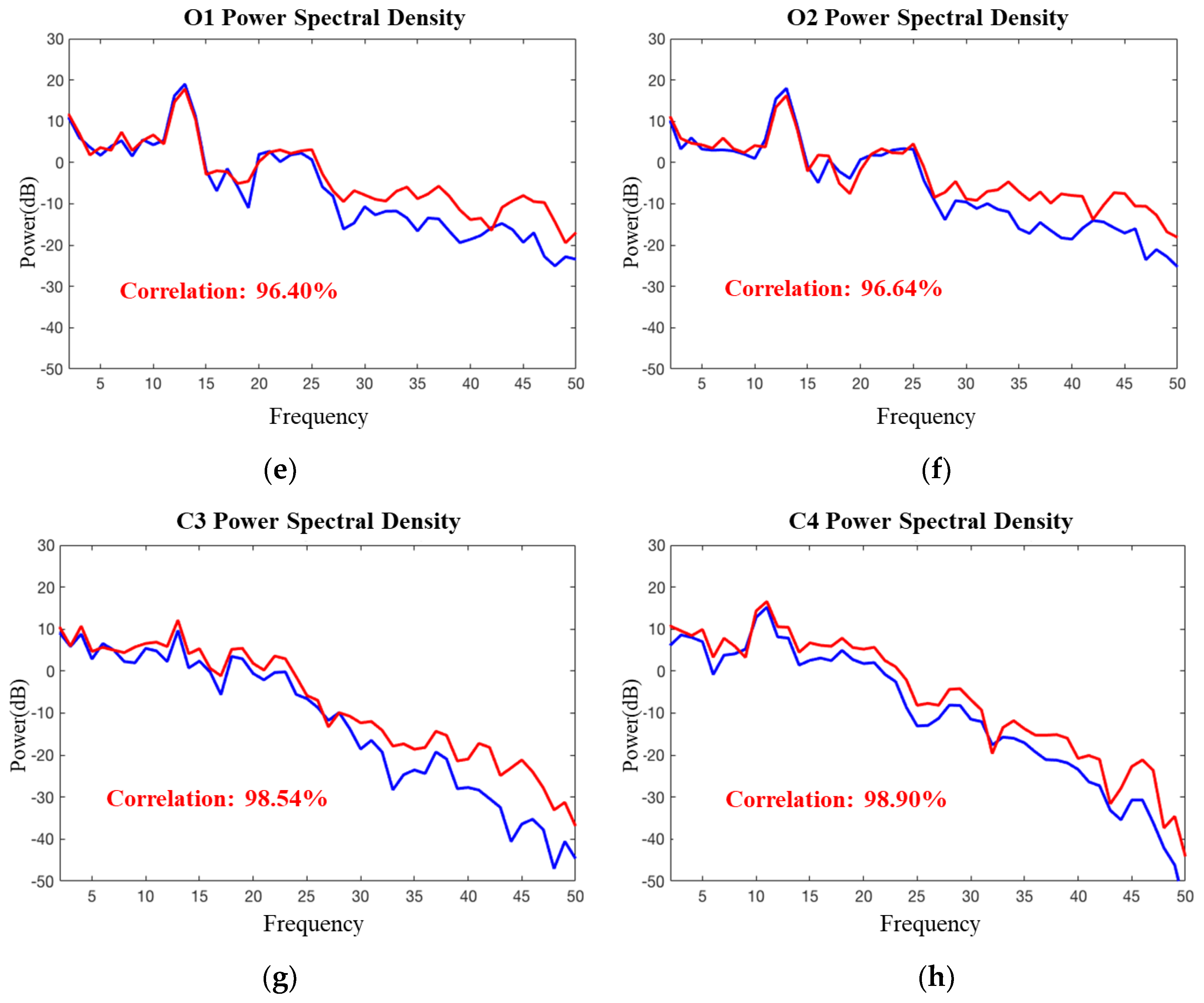
3.2. Signal Validation
3.3. Performance of Simulated Military Mission
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ang, K.K.; Chua, K.S.G.; Phua, K.S.; Wang, C.; Chin, Z.Y.; Kuah, C.W.K.; Low, W.; Guan, C.; et al. A randomized controlled trial of EEG-based motor imagery brain-computer interface robotic rehabilitation for stroke. Clin. EEG Neurosci. 2015, 46, 310–320. [Google Scholar] [CrossRef]
- Chen, X.; Wang, Y.; Nakanishi, M.; Jung, T.-P.; Gao, X. Hybrid frequency and phase coding for a high-speed SSVEP-based BCI speller. In Proceedings of the 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Chicago, IL, USA, 26–30 August 2014; pp. 3993–3996. [Google Scholar]
- Zhang, R.; Li, Y.; Yan, Y.; Zhang, H.; Wu, S.; Yu, T.; Gu, Z. Control of a Wheelchair in an Indoor Environment Based on a Brain–Computer Interface and Automated Navigation. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 128–139. [Google Scholar] [CrossRef] [PubMed]
- Norton, J.J.S.; Umunna, S.; Bretl, T. The elicitation of steady-state visual evoked potentials during sleep. Psychophysiology 2017, 54, 496–507. [Google Scholar] [CrossRef] [PubMed]
- Sharon, O.; Nir, Y. Attenuated Fast Steady-State Visual Evoked Potentials During Human Sleep. Cereb. Cortex 2017, 28, 1297–1311. [Google Scholar] [CrossRef] [PubMed]
- Lopez-Gordo, M.A.; Morillo, D.S.; Valle, F.P. Dry EEG Electrodes. Sensors 2014, 14, 12847–12870. [Google Scholar] [CrossRef]
- Stern, J.M. Atlas of EEG Patterns; Lippincott Williams & Wilkins: Philadelphia, PA, USA, 2005. [Google Scholar]
- Hebenstreit, F.; Gabsteiger, F.; Von Tscharner, V.; Lochmann, M.; Reis, P.M.R. Methodological aspects of EEG and body dynamics measurements during motion. Front. Hum. Neurosci. 2014, 8, 156. [Google Scholar]
- Chi, Y.M.; Jung, T.-P.; Cauwenberghs, G. Dry-Contact and Noncontact Biopotential Electrodes: Methodological Review. IEEE Rev. Biomed. Eng. 2010, 3, 106–119. [Google Scholar] [CrossRef]
- Chi, Y.M.; Wang, Y.-T.; Wang, Y.; Maier, C.; Jung, T.-P.; Cauwenberghs, G. Dry and Noncontact EEG Sensors for Mobile Brain–Computer Interfaces. IEEE Trans. Neural Syst. Rehabil. Eng. 2012, 20, 228–235. [Google Scholar] [CrossRef]
- Searle, A.; Kirkup, L. A direct comparison of wet, dry and insulating bioelectric recording electrodes. Physiol. Meas. 2000, 21, 271–283. [Google Scholar] [CrossRef]
- Lin, C.-T.; Liao, L.-D.; Liu, Y.-H.; Wang, I.-J.; Lin, B.-S.; Chang, J.-Y. Novel Dry Polymer Foam Electrodes for Long-Term EEG Measurement. IEEE Trans. Biomed. Eng. 2011, 58, 1200–1207. [Google Scholar]
- Liao, L.-D.; Wang, I.-J.; Chen, S.-F.; Chang, J.-Y.; Lin, C.-T.; Lin, C.-T. Design, Fabrication and Experimental Validation of a Novel Dry-Contact Sensor for Measuring Electroencephalography Signals without Skin Preparation. Sensors 2011, 11, 5819–5834. [Google Scholar] [CrossRef] [PubMed]
- Liao, L.-D.; Wu, S.-L.; Liou, C.-H.; Lu, S.-W.; Chen, S.-A.; Chen, S.-F.; Ko, L.-W.; Lin, C.-T. A Novel 16-Channel Wireless System for Electroencephalography Measurements with Dry Spring-Loaded Sensors. IEEE Trans. Instrum. Meas. 2014, 63, 1545–1555. [Google Scholar] [CrossRef]
- Yeung, A.; Garudadri, H.; Van Toen, C.; Mercier, P.; Balkan, O.; Makeig, S.; Virji-Babul, N. Comparison of foam-based and spring-loaded dry EEG electrodes with wet electrodes in resting and moving conditions. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 7131–7134. [Google Scholar]
- Chen, Y.-H.; De Beeck, M.O.; Vanderheyden, L.; Carrette, E.; Mihajlovic, V.; Vanstreels, K.; Grundlehner, B.; Gadeyne, S.; Boon, P.; Van Hoof, C. Soft, Comfortable Polymer Dry Electrodes for High Quality ECG and EEG Recording. Sensors 2014, 14, 23758–23780. [Google Scholar] [CrossRef] [PubMed]
- Yu, Y.-H.; Chen, S.-H.; Chang, C.-L.; Lin, C.-T.; Hairston, W.D.; Mrozek, R.A.; Star, A.; Lin, C.-T.; Hairston, W. New Flexible Silicone-Based EEG Dry Sensor Material Compositions Exhibiting Improvements in Lifespan, Conductivity, and Reliability. Sensors 2016, 16, 1826. [Google Scholar] [CrossRef]
- Oehler, M.; Neumann, P.; Becker, M.; Curio, G.; Schilling, M. Extraction of SSVEP signals of a capacitive EEG helmet for Human Machine Interface. In Proceedings of the 2008 30th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Vancouver, BC, Canada, 20–24 August 2008; pp. 4495–4498. [Google Scholar]
- Mathewson, K.E.; Harrison, T.J.; Kizuk, S.A.J.P. High and dry? Comparing active dry EEG electrodes to active and passive wet electrodes. Psychophysiology 2017, 54, 74–82. [Google Scholar] [CrossRef]
- Thakor, N.V. Biopotentials and electrophysiology measurement. Meas. Instrum. Sens. Handb. 1999, 74. [Google Scholar] [CrossRef]
- Ko, L.-W.; Chang, Y.; Wu, P.-L.; Lu, Y.-C.; Yeh, C.-L.; Chen, Y.-J. Novel Moisture Retention Sponge Electrodes for Developing a Wireless EEG SSVEP-based BCI System. In Proceedings of the 2018 International Automatic Control Conference (CACS), Taoyuan, Taiwan, 4–7 November 2018; pp. 1–5. [Google Scholar]
- Geddes, L.A. Principles of Applied Biomedical Instrumentation; John Wiley & Sons: Hoboken, NJ, USA, 1968. [Google Scholar] [CrossRef]
- Carim, H. Bioelectrodes in Encyclopedia of Medical Devices and Instrumentation; Webster, J.G., Ed.; Wiley & Sons: New York, NY, USA, 1968; Volume 1. [Google Scholar]
- Lin, C.-T.; Ko, L.-W.; Chang, C.-J.; Wang, Y.-T.; Chung, C.-H.; Yang, F.-S.; Duann, J.-R.; Jung, T.-P.; Chiou, J.-C.; Lin, C.-T. Wearable and Wireless Brain-Computer Interface and Its Applications. In Proceedings of the International Conference on Foundations of Augmented Cognition, San Diego, CA, USA, 19–24 July 2009; Springer: Berlin/Heidelberg, Germany, 2009; Volume 5638, pp. 741–748. [Google Scholar]
- Schmorrow, D.D. Foundations of Augmented Cognition; CRC Press: Boca Raton, FL, USA, 2005. [Google Scholar]
- Lin, C.-T.; Chuang, C.-H.; Huang, C.-S.; Tsai, S.-F.; Lu, S.-W.; Chen, Y.-H.; Ko, L.-W. Wireless and Wearable EEG System for Evaluating Driver Vigilance. IEEE Trans. Biomed. Circuits Syst. 2014, 8, 165–176. [Google Scholar]
- Lin, C.-T.; Chuang, C.-H.; Huang, C.-S.; Chen, Y.-H.; Ko, L.-W. Real-time assessment of vigilance level using an innovative Mindo4 wireless EEG system. In Proceedings of the 2013 IEEE International Symposium on Circuits and Systems (ISCAS2013), Beijing, China, 19–23 May 2013; pp. 1528–1531. [Google Scholar]
- Hakvoort, G.; Reuderink, B.; Obbink, M. Comparison of PSDA and CCA Detection Methods in a SSVEP-Based BCI-System; Centre for Telematics & Information Technology University of Twente: Enschede, The Netherlands, 2011. [Google Scholar]
- Nakanishi, M.; Wang, Y.; Wang, Y.-T.; Jung, T.-P. A Comparison Study of Canonical Correlation Analysis Based Methods for Detecting Steady-State Visual Evoked Potentials. PLoS ONE 2015, 10, e0140703. [Google Scholar] [CrossRef] [PubMed]
- Kappenman, E.S.; Luck, S.J. The Effects of Electrode Impedance on Data Quality and Statistical Significance in ERP Recordings. Psychophysiology 2010, 47, 888–904. [Google Scholar] [CrossRef] [PubMed]
- Fowles, D.C.; Venables, P.H. The reduction of palmar skin potential by epidermal hydration. Psychophysiology 1970, 7, 254–261. [Google Scholar] [CrossRef]
- Tregear, R.T. Physical Functions of Skin; Academic Press: Cambridge, MA, USA, 1966. [Google Scholar]
- Cömert, A.; Honkala, M.E.; Hyttinen, J. Effect of pressure and padding on motion artifact of textile electrodes. Biomed. Eng. Online 2013, 12, 26. [Google Scholar] [CrossRef] [PubMed]
- Cömert, A.; Hyttinen, J. Investigating the possible effect of electrode support structure on motion artifact in wearable bioelectric signal monitoring. Biomed. Eng. Online 2015, 14, 44. [Google Scholar] [CrossRef] [PubMed]
- Fiedler, P.; Muhle, R.; Griebel, S.; Pedrosa, P.; Fonseca, C.; Vaz, F.; Zanow, F.; Haueisen, J. Contact Pressure and Flexibility of Multipin Dry EEG Electrodes. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 750–757. [Google Scholar] [CrossRef] [PubMed]
- Ferree, T.C.; Luu, P.; Russell, G.S.; Tucker, D.M. Scalp electrode impedance, infection risk, and EEG data quality. Clin. Neurophysiol. 2001, 112, 536–544. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Channel | Time Series | Power Spectral Density | |
|---|---|---|---|
| 2 s | 10 s | ||
| Fp1 | 93.92% | 87.99% | 98.14% |
| Fp2 | 94.46% | 87.27% | 94.45% |
| Fz | 86.84% | 82.79% | 98.57% |
| C3 | 83.72% | 80.52% | 98.54% |
| C4 | 92.07% | 81.89% | 98.90% |
| Pz | 88.98% | 80.38% | 97.76% |
| O1 | 90.50% | 78.70% | 96.40% |
| O2 | 89.76% | 80.91% | 94.64% |
| Average | 90.03% | 82.56% | 97.18% |
| Subject No. | Hits | Accuracy (%) | Subject No. | Hits | Accuracy (%) |
|---|---|---|---|---|---|
| 1 | 28 | 93.33 | 12 | 25 | 83.33 |
| 2 | 28 | 93.33 | 13 | 29 | 96.67 |
| 3 | 26 | 86.67 | 14 | 23 | 76.67 |
| 4 | 30 | 100.00 | 15 | 24 | 80.00 |
| 5 | 30 | 100.00 | 16 | 30 | 100.00 |
| 6 | 30 | 100.00 | 17 | 30 | 100.00 |
| 7 | 25 | 83.33 | 18 | 30 | 100.00 |
| 8 | 28 | 93.33 | 19 | 28 | 93.33 |
| 9 | 24 | 80.00 | 20 | 25 | 83.33 |
| 10 | 27 | 90.00 | 21 | 26 | 86.67 |
| 11 | 28 | 93.33 | Average | 27.3 ± 2.27 | 91.11 ± 7.58 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ko, L.-W.; Chang, Y.; Wu, P.-L.; Tzou, H.-A.; Chen, S.-F.; Tang, S.-C.; Yeh, C.-L.; Chen, Y.-J. Development of a Smart Helmet for Strategical BCI Applications. Sensors 2019, 19, 1867. https://doi.org/10.3390/s19081867
Ko L-W, Chang Y, Wu P-L, Tzou H-A, Chen S-F, Tang S-C, Yeh C-L, Chen Y-J. Development of a Smart Helmet for Strategical BCI Applications. Sensors. 2019; 19(8):1867. https://doi.org/10.3390/s19081867
Chicago/Turabian StyleKo, Li-Wei, Yang Chang, Pei-Lun Wu, Heng-An Tzou, Sheng-Fu Chen, Shih-Chien Tang, Chia-Lung Yeh, and Yun-Ju Chen. 2019. "Development of a Smart Helmet for Strategical BCI Applications" Sensors 19, no. 8: 1867. https://doi.org/10.3390/s19081867
APA StyleKo, L.-W., Chang, Y., Wu, P.-L., Tzou, H.-A., Chen, S.-F., Tang, S.-C., Yeh, C.-L., & Chen, Y.-J. (2019). Development of a Smart Helmet for Strategical BCI Applications. Sensors, 19(8), 1867. https://doi.org/10.3390/s19081867