Sensitivity of Safe Trajectory in a Game Environment on Inaccuracy of Radar Data in Autonomous Navigation


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
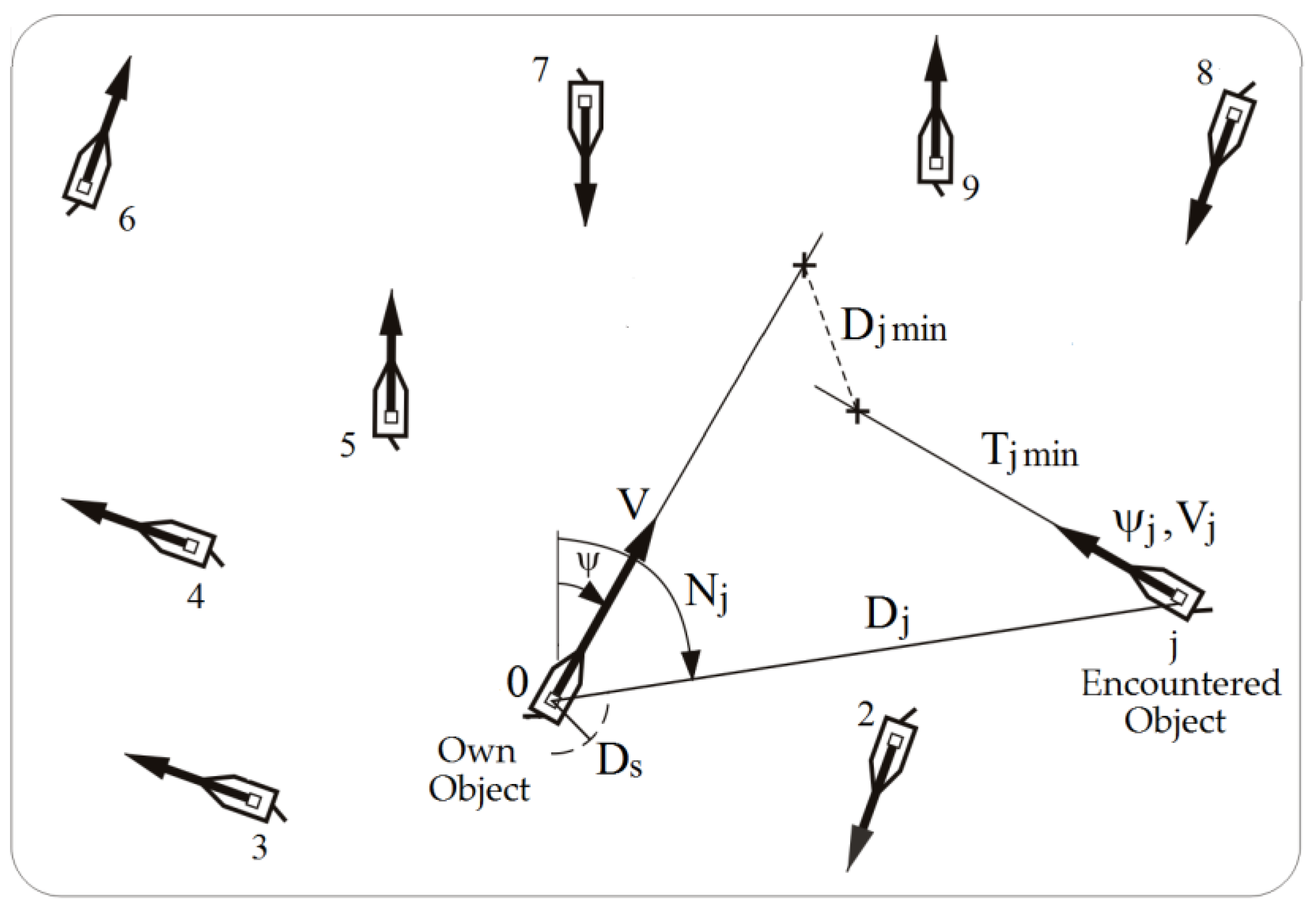
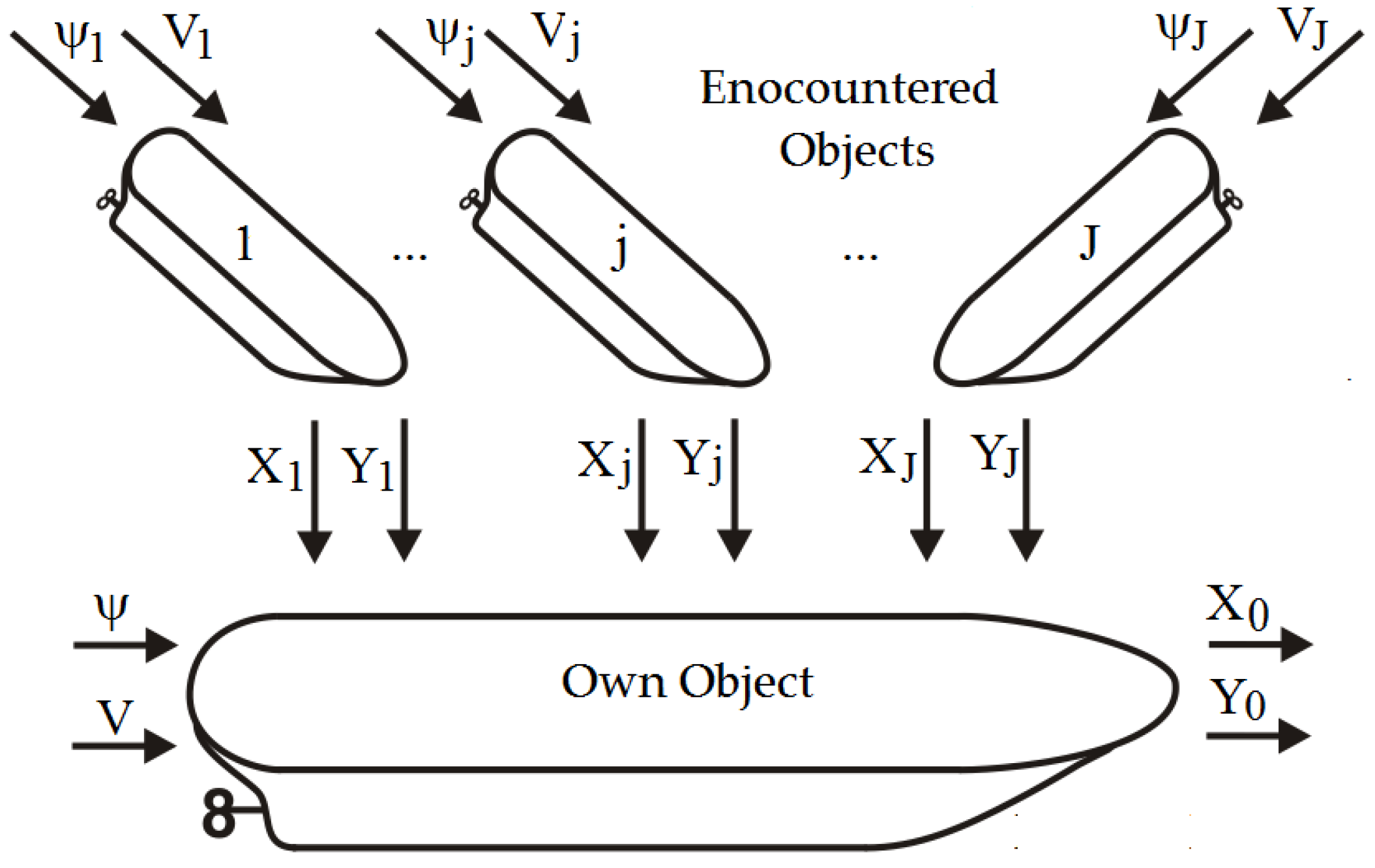
2. The Safe and Game Object Control in Autonomous Ship Navigation
- (1)
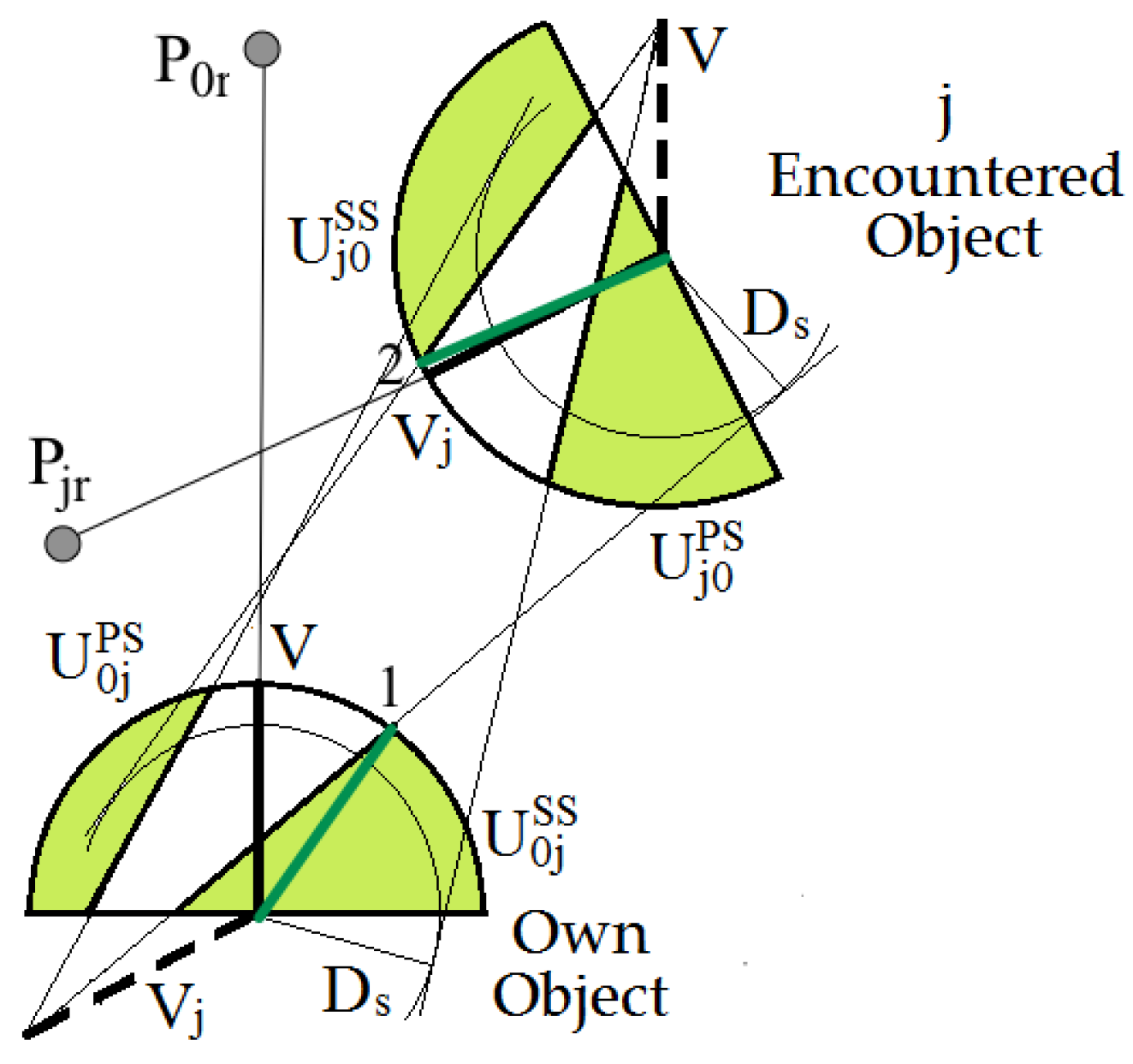
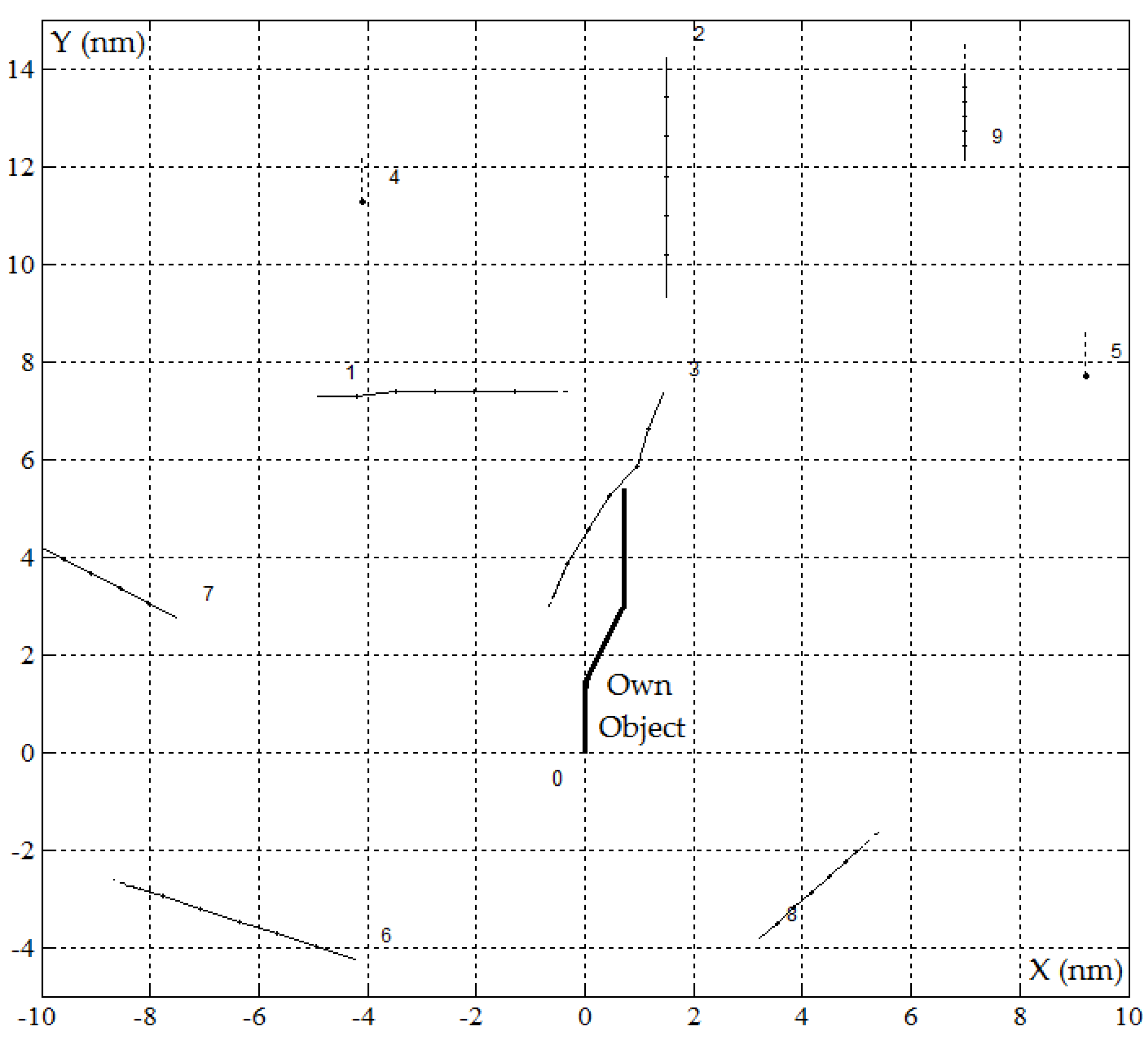
- Task min1: determine the safe admissible and optimal control of the own object u0j in relation to the encountered jth object from the appropriate set of acceptable strategies U0jPS or U0jSS, which must comply with the 15th rule of COLREGs and ensure the lowest loss of the path for the safe passage of the encountered object (point 1 in Figure 3),
- (2)
- Task min2: determine the safe admissible and optimal control of the encountered jth object uj0 in relation to the own object from the appropriate set of acceptable strategies Uj0PS or Uj0SS, which must comply with the 15th rule of COLREGs and ensure the lowest loss of the path for safe pasting of the own object (point 2 in Figure 3),
- (3)
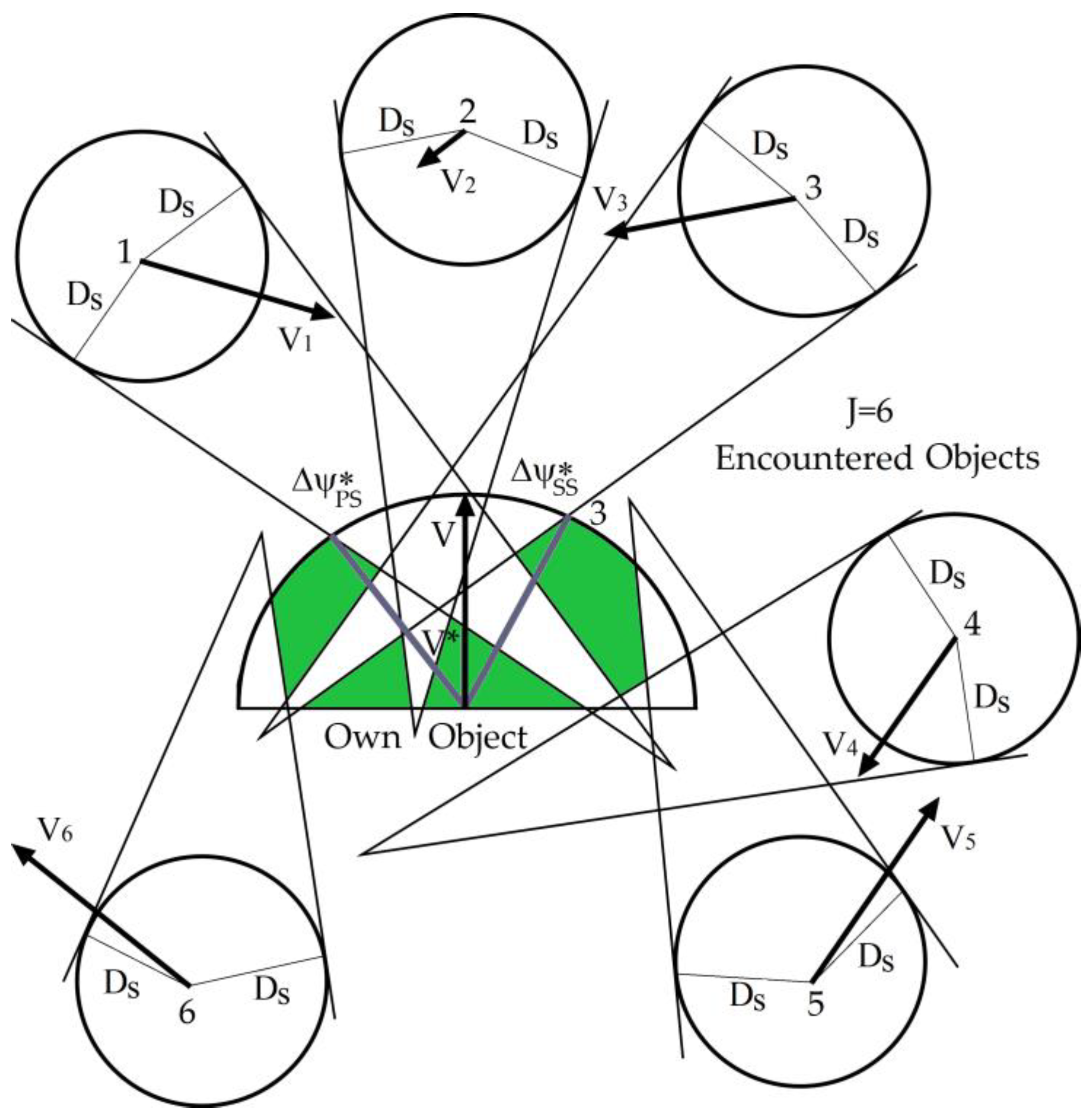
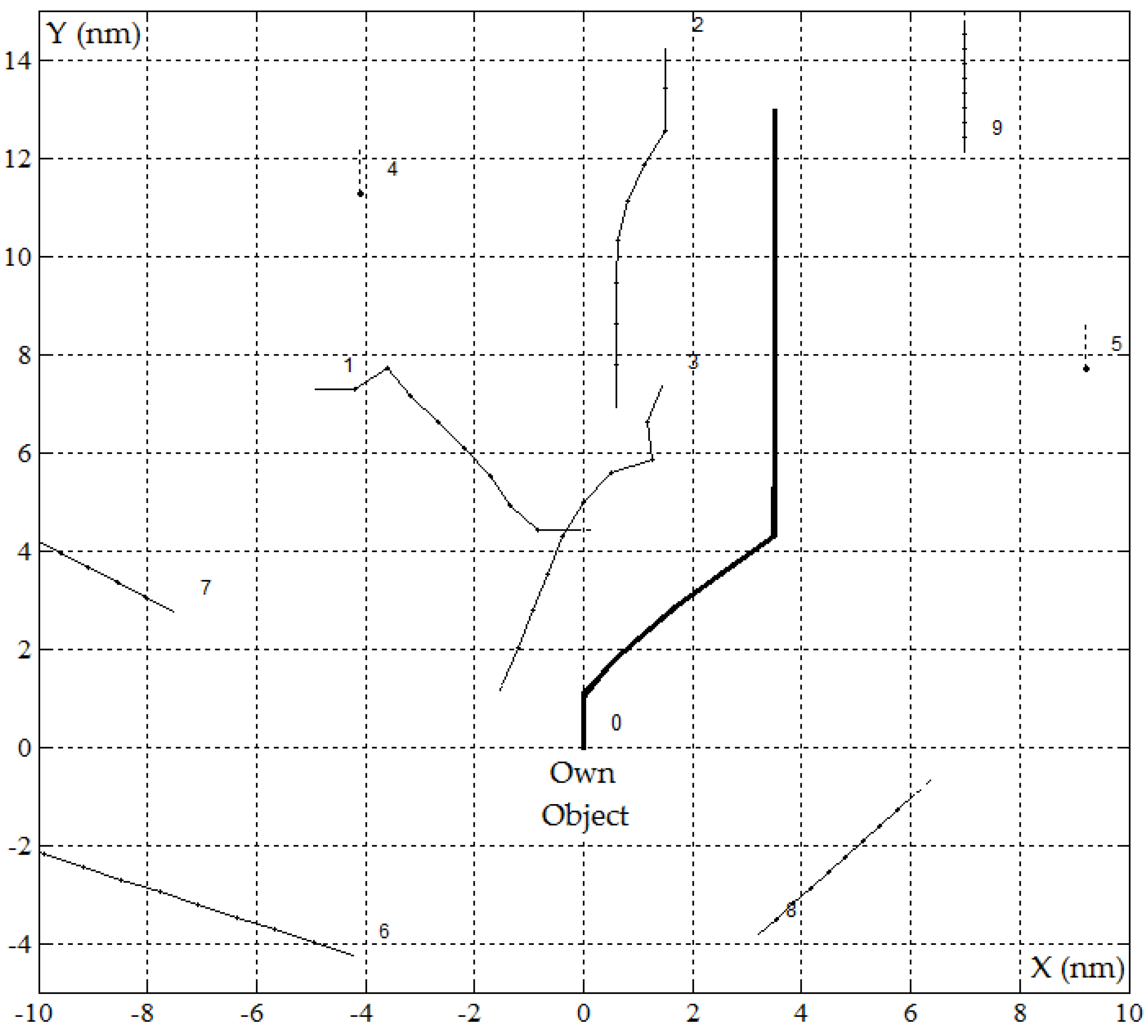
- Task min3: determine the safe and optimal control of the own object u0 in relation to all J objects (point 3 in Figure 4) of the following dependence:
3. Control Sensitivity Analysis
- radar: bearing ±0.25° and distance ±0.05 nm,
- gyrocompass: ±0.5°,
- log: ±0.5 kn.
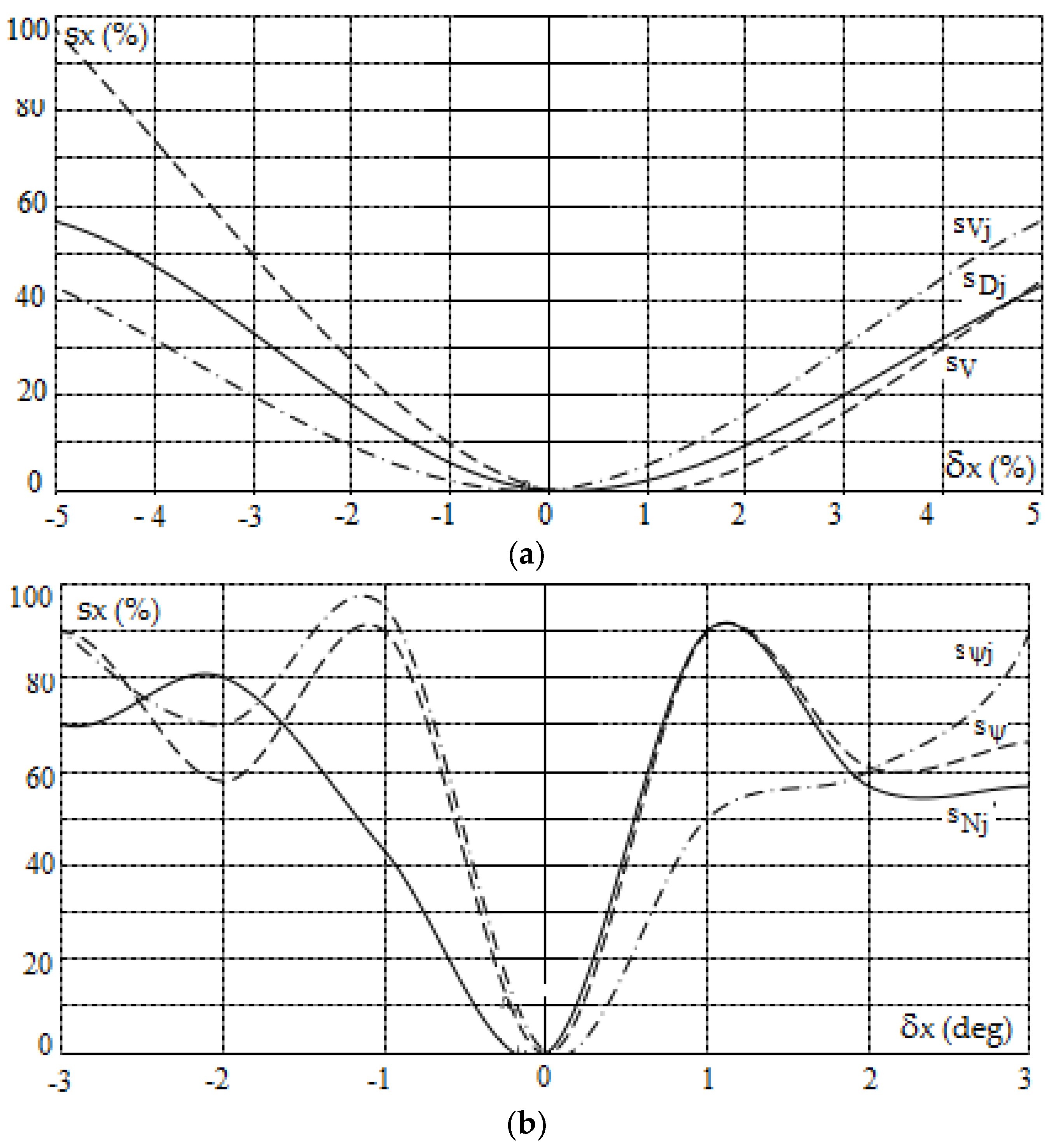
3.1. Sensitivity of Safe Ship Control to Inaccuracy of Information from Sensors of ARPA System
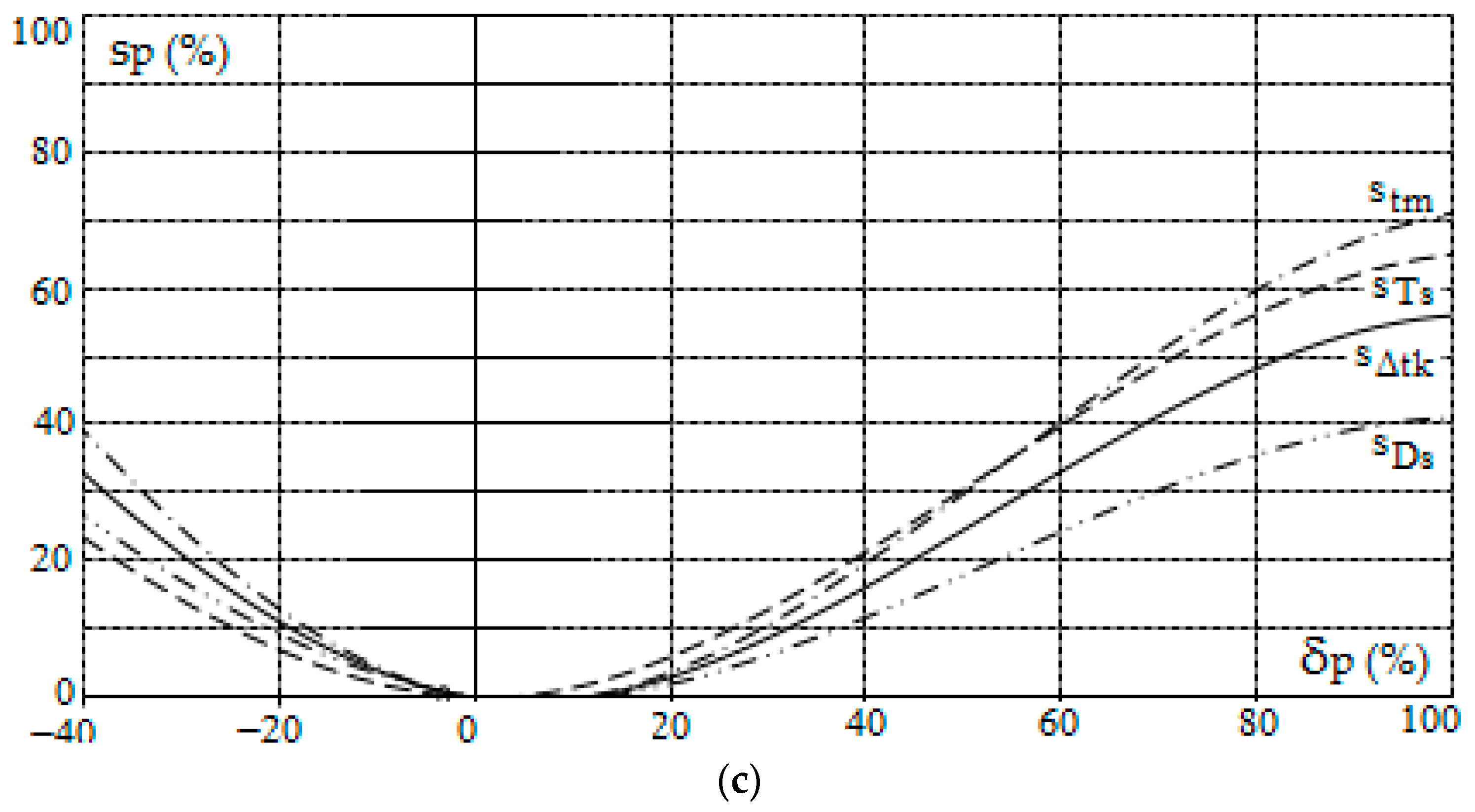
3.2. Sensitivity of Safe Own Object Control to Autonomous Navigation Process Parameter Alterations
4. Sensitivity Characteristics
4.1. Sensitivity Characteristics of Game Own Object Control in Good Visibility at Sea
4.2. Sensitivity Characteristics of Game Own Object Control in Restricted Visibility at Sea
5. Conclusions
- the sensitivity characteristics are nonlinear, with most being angular values,
- in the range of the most important changes in input quantities (1% for absolute values, 1 degree for angular quantities and 20% for process parameters), the sensitivity usually does not exceed 20%,
- together with the deterioration of visibility at sea, the sensitivity to the inaccuracy of information about the object encountered and the change in the value of safe distance and time of approach increases.
Funding
Conflicts of Interest
References
- Bole, A.; Dineley, B.; Wall, A. Radar and ARPA Manual; Elsevier: Amsterdam-Tokyo, The Netherlands, 2006; ISBN 978-0-08-048052-7. [Google Scholar]
- Bist, D.S. Safety and Security at Sea; Butter Heinemann: Berlin, Germany, 2000; ISBN 0-75064-774-4. [Google Scholar]
- Perera, L.P.; Carvalho, J.P.; Soares, C.G. Decision making system for the collision avoidance of marine vessel navigation based on COLREGs rules and regulations. In Proceedings of the 13th Congress of International Maritime Association of Mediterranean, Istanbul, Turkey, 12–15 October 2009. [Google Scholar]
- Schuster, M.; Blaich, M.; Reuter, J. Collision avoidance for vessels using a low-cost radar sensor. IFAC Proc. 2014, 47, 9673–9678. [Google Scholar] [CrossRef]
- Zhang, L.; Gao, W.; Li, Q.; Li, R.; Yao, Z.; Lu, S. A novel monitoring navigation method for cold atom interference gyroscope. Sensors 2019, 19, 222. [Google Scholar] [CrossRef] [PubMed]
- Lin, H.; Chen, H.; Wang, H.; Yin, J.; Yang, J. Ship detection for PolSAR images via task-driven discriminative dictionary learning. Remote Sens. 2019, 11, 769. [Google Scholar] [CrossRef]
- Wang, K.; Zhang, P.; Niu, J.; Sun, W.; Zhao, L.; Ji, Y. A performance evaluation scheme for multiple object tracking with HFSWR. Sensors 2019, 19, 1393. [Google Scholar] [CrossRef]
- Huang, Y.; Shi, Y.; Song, T.L. An efficient multri-path multitarget tracking algorithm for Over-The-Horizon radar. Sensors 2019, 19, 1384. [Google Scholar] [CrossRef] [PubMed]
- Chang, Y.-L.; Anagaw, A.; Chang, L.; Wang, Y.C.; Hsiao, C.-Y.; Lee, W-H. Ship detection bvased on YOLOv2 for SAR imagery. Remote Sens. 2019, 11, 786. [Google Scholar] [CrossRef]
- Perez, T. Ship Motion Control; Springer: Berlin, Germany, 2005; ISBN 978-1-84628-157-0. [Google Scholar]
- EMSA—European Maritime Safety Agency. Annual Overview of Marine Casualties and Incidents 2018; EMSA: Lisboa, Portugal, 2018. [Google Scholar]
- Gluver, H.; Olsen, D. Ship Collision Analysis; Balkema: New York, NY, USA, 1998; ISBN 90-5410-962-9. [Google Scholar]
- Lisowski, J. The safe control sensitivity functions in matrix game of ships. Transnav Int. J. Mar. Navig. Saf. Sea Transp. 2018, 12, 527–532. [Google Scholar] [CrossRef]
- Eslami, M. Theory of Sensitivity in Dynamic Systems; Springer: Berlin, Germany, 1994; ISBN 978-3-662-01632-9. [Google Scholar]
- Rosenwasser, E.; Yusupov, R. Sensitivity of Automatic Control Systems; CRC Press: Boca Raton, FL, USA, 2000; ISBN 978-0-849-3229293-8. [Google Scholar]
- Wierzbicki, A. Models and Sensitivity of Control Systems; WNT: Warszawa, Poland, 1977; ISBN 0-444-996-20-6. [Google Scholar]
- Cruz, J. Feedback Systems; Mc Graw-Hill Book Company: New York, NY, USA, 1972; ISBN 0-691-135-76-2. [Google Scholar]
- Cao, J.; Sun, Y.; Kong, Y.; Qian, W. The sensitivity of grating-based SPR sensors with wavelength interrogation. Sensors 2019, 19, 405. [Google Scholar] [CrossRef] [PubMed]
- Seok, G.; Kim, Y. Front-inner lens for high sensitivity of CMOS image sensors. Sensors 2019, 19, 1536. [Google Scholar] [CrossRef] [PubMed]
- Ahsani, V.; Ahmed, F.; Jun, M.B.G.; Bradley, C. Tapered fiber-optic Mach-Zehnder interferometer for ultr-high sensitivity measurement of refractive index. Sensors 2019, 19, 1652. [Google Scholar] [CrossRef] [PubMed]
- Kowal, D.; Statkiewicz-Barabach, G.; Bernas, M.; Napiorkowski, M.; Makara, M.; Czyzewska, L.; Mergo, P.; Urbanczyk, W. Polarimetric sensitivity to torsion in spun highly birefringent fibers. Sensors 2019, 19, 1639. [Google Scholar] [CrossRef] [PubMed]
- Lenart, A.S. Analysis of Collision Threat Parameters and Criteria. J. Navig. 2015, 68, 887–896. [Google Scholar] [CrossRef]
- Borkowski, P. Presentation algorithm of possible collision solutions in a navigational decision support system. Sci. J. Marit. Univ. Szczec. 2014, 38, 20–26. [Google Scholar]
- Basar, T.; Olsder, G.J. Dynamic Noncooperative Game Theory; Siam: Philadelphia, PA, USA, 2013; ISBN 978-0-898-714-29-6. [Google Scholar]
- Bressan, A.; Nguyen, K.T. Stability of feedback solutions for infinite horizon noncooperative differential games. Dyn. Games Appl. 2018, 8, 42–78. [Google Scholar] [CrossRef]
- Breton, M.; Szajowski, K. Advances in Dynamic Games: Theory, Applications and Numerical Methods for Differential and Stochastic Games; Birkhauser: Boston, MA, USA, 2010; ISBN 978-0-8176-8089-3. [Google Scholar]
- Broek, W.A.; Engwerda, J.C.; Schumacher, J.M. Robust equilibria in indefinite linear-quadratic differential games. J. Optim. Theory Appl. 2003, 119, 565–595. [Google Scholar] [CrossRef]
- Dockner, E.; Feichtinger, G.; Mehlmann, A. Noncooperative solutions for a differential game model of fishery. J. Econ. Dyn. Control 1989, 13, 1–20. [Google Scholar] [CrossRef]
- Engwerda, J.C. LQ Dynamic Optimization and Differential Games; John Wiley & Sons: West Sussex, UK, 2005; ISBN 978-0-470-01524-7. [Google Scholar]
- Gromova, E.V.; Petrosyan, L.A. On an approach to constructing a characteristic function in cooperative differential games. Autom. Remote Control 2017, 78, 1680–1692. [Google Scholar] [CrossRef]
- Isaacs, R. Differential Games; John Wiley and Sons: New York, NY, USA, 1965; ISBN 0-48640-682-2. [Google Scholar]
- Krawczyk, P.; Zaccour, G. Games and Dynamic Games; World Scientific: New York, NY, USA, 2012; ISBN 9-78981-440-126-5. [Google Scholar]
- Miloh, T. Determination of Critical Manoeuvres for Collision Avoidance Using the Theory of Differential Games; Institut Für Schiffbau: Hamburg, Germany, 1974. [Google Scholar]
- Mesterton-Gibbons, M. An Introduction to Game Theoretic Modeling; American Mathematical Society: New York, NY, USA, 2001; ISBN 978-0-82-181929-6. [Google Scholar]
- Millington, I.; Funge, J. Artificial Intelligence for Games; Elsevier: Amsterdam-Tokyo, The Netherlands, 2009; ISBN 978-0-12-374731-0. [Google Scholar]
- Modarres, M. Risk Analysis in Engineering; Francis Group: London, UK, 2006; ISBN 1-57444-794-7. [Google Scholar]
- Nisan, N.; Roughgarden, T.; Tardos, E.; Vazirani, V.V. Algorithmic Game Theory; Cambridge University Press: New York, NY, USA, 2007; ISBN 978-0-521-87282-9. [Google Scholar]
- Olsder, G.J.; Walter, J.L. A differential game approach to collision avoidance of ships. Proceed. VIII Symp. IFIP Optim. Techn. 1977, 6, 264–271. [Google Scholar]
- Osborne, M.J. An Introduction to Game Theory; Oxford University Press: New York, NY, USA, 2004; ISBN 978-0-19-512895-6. [Google Scholar]
- Sadler, D.H. The mathematics of collision avoidance at sea. J. Navig. 1957, 10, 306–319. [Google Scholar] [CrossRef]
- Sanchez-Soriano, J. An overview on game theory applications to engineering. Int. Game Theory Rev. 2013, 15, 1–18. [Google Scholar] [CrossRef]
- Wells, D. Games and Mathematics; Cambridge University Press: London, UK, 2013; ISBN 978-1-78326-752-1. [Google Scholar]


© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lisowski, J. Sensitivity of Safe Trajectory in a Game Environment on Inaccuracy of Radar Data in Autonomous Navigation. Sensors 2019, 19, 1816. https://doi.org/10.3390/s19081816
Lisowski J. Sensitivity of Safe Trajectory in a Game Environment on Inaccuracy of Radar Data in Autonomous Navigation. Sensors. 2019; 19(8):1816. https://doi.org/10.3390/s19081816
Chicago/Turabian StyleLisowski, Józef. 2019. "Sensitivity of Safe Trajectory in a Game Environment on Inaccuracy of Radar Data in Autonomous Navigation" Sensors 19, no. 8: 1816. https://doi.org/10.3390/s19081816
APA StyleLisowski, J. (2019). Sensitivity of Safe Trajectory in a Game Environment on Inaccuracy of Radar Data in Autonomous Navigation. Sensors, 19(8), 1816. https://doi.org/10.3390/s19081816