Ranked Sense Multiple Access Control Protocol for Multichannel Cognitive Radio-Based IoT Networks

 ,
,  ,
,  ,
,  ,
,  ,
,  ,
, 

Abstract
:1. Introduction
- We propose a simple but immanent MAC protocol for multichannel channel CR-based IoT networks, which not only resolves the intrinsic hidden primary terminal problem but also fixes the classical hidden and exposed terminal problems at the same time.
- We suggest algorithms for the construction of hopping sequences in secondary transmitter and receiver by modifying the exiting BRACER protocol in the minimal to achieve rendezvous in an efficient time.
- We propose a novel ranking mechanism to downsize the available channels, which is based on the past information of the channels’ qualities as well as the activities of SUs and PUs enabling IoT devices selecting the best channels to reduce rendezvous time and plummet PUs’ interference and SUs’ collisions on those channels.
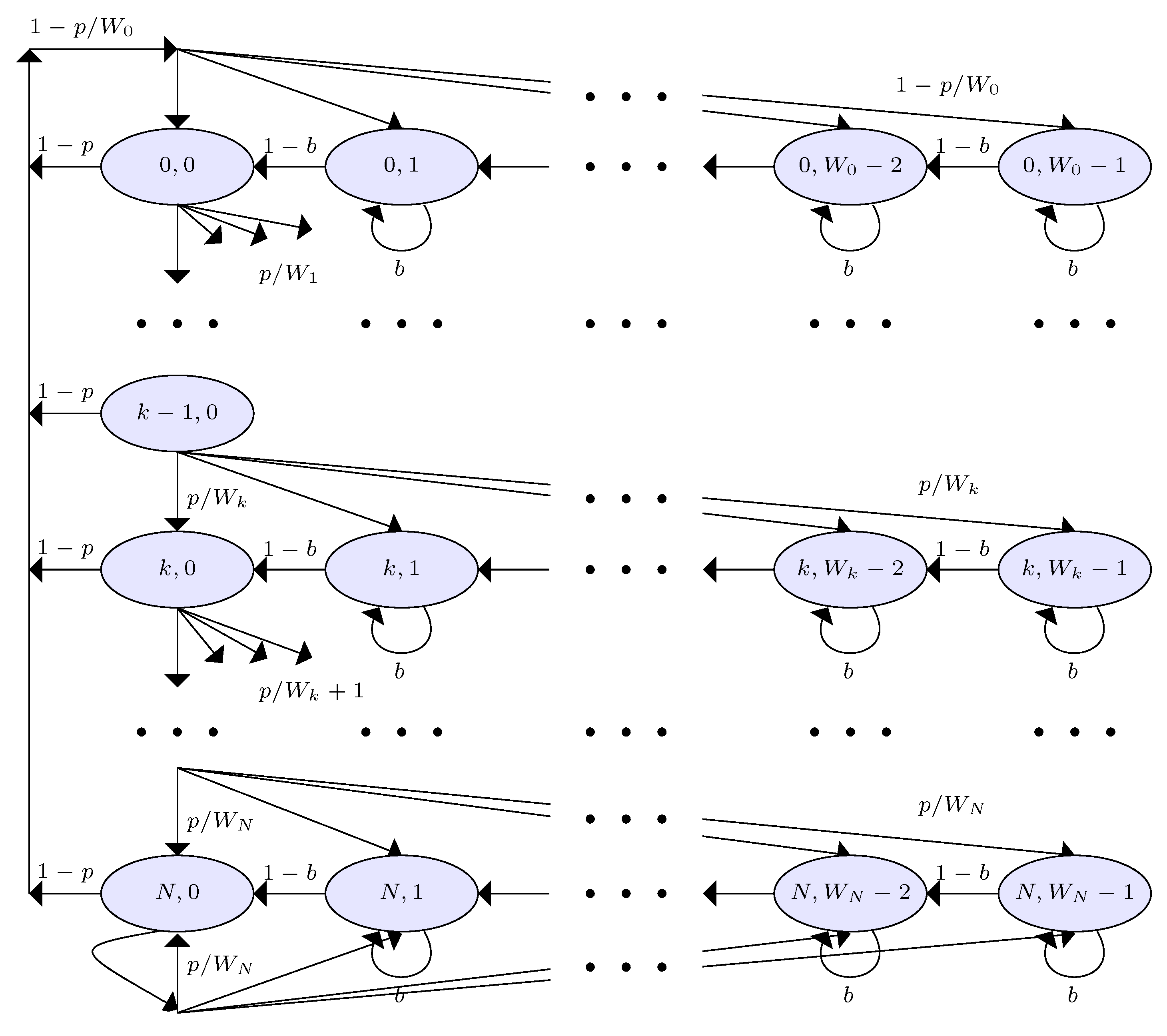
- We analyze the normalized throughput of our proposed protocol with the Markov chain model and verify through the Monte Carlo simulations in the MATLAB. We also compared the throughput of our proposed MAC with that of the exiting BRACER protocol.
2. Related Works
3. System Model
4. Proposed Protocol
4.1. Channel Negotiation
| Algorithm 1 Construction of hopping sequence for rendezvous operation of a SU transmitter i. |
| Input:, ; |
| Output: |
| 1: Randomize the order of ; |
| 2: ; |
| 3. ; |
| 4: while do |
| 5: ; |
| 6: ; |
| 7: end while |
| 8: return ; |
| Algorithm 2 Construction of hopping sequence for rendezvous operation of a SU receiver j. |
| Input:, , ; |
| Output: |
| 1: Randomize the order of ; |
| 2: ; |
| 3: ; |
| 4: while do |
| 5: ; |
| 6: while do |
| 7: ; |
| 8: ; |
| 9: end while |
| 10: ; |
| 11: end while |
| 12: return ; |
4.2. Channel Selection
4.3. Channel Sharing
5. Performance Analysis
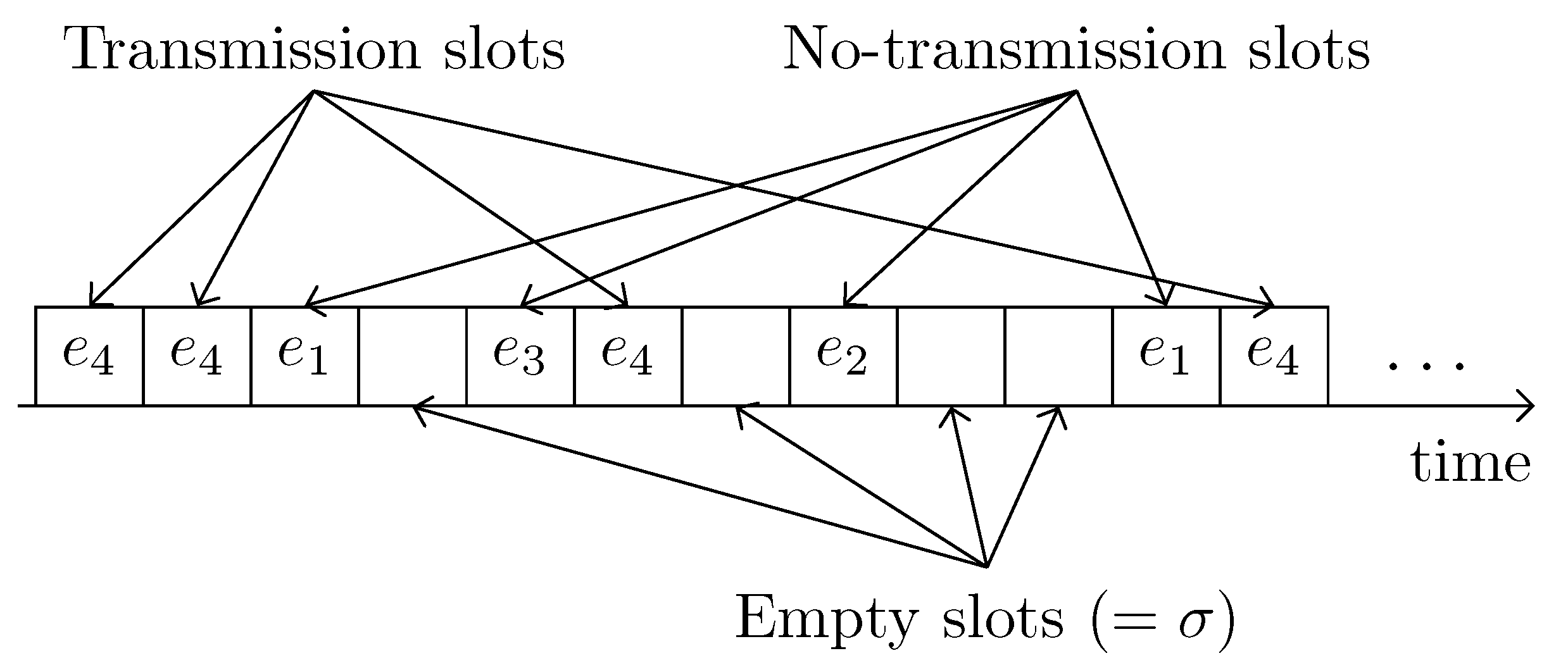
5.1. Packet Transmission Process
5.2. Normalized Throughput
- The topology of the secondary network is a fully connected graph, in which SUs are distributed with a single hop distance and are directly connected to each other.
- The secondary network is in the saturated state such that each SU always has backlogged queue with at least one DATA packet to send.
- The size of the downsized ranked channel sets have at least one common available channel at the transmitter SU i and its corresponding receiver SU j.
- The ranking of the downsized channels remains stable for one successive transmission period.
- There is no capture effect in the rendezvous-channel because it is error-free. Thus, a packet is only dropped when there is a collision in the system.
- The control and DATA packets are transmitted at the same rate through the rendezvous-channel, which is shared among all SUs.
- The physical layer, PU return rate, and transmission rate are the same and constant for all SUs.
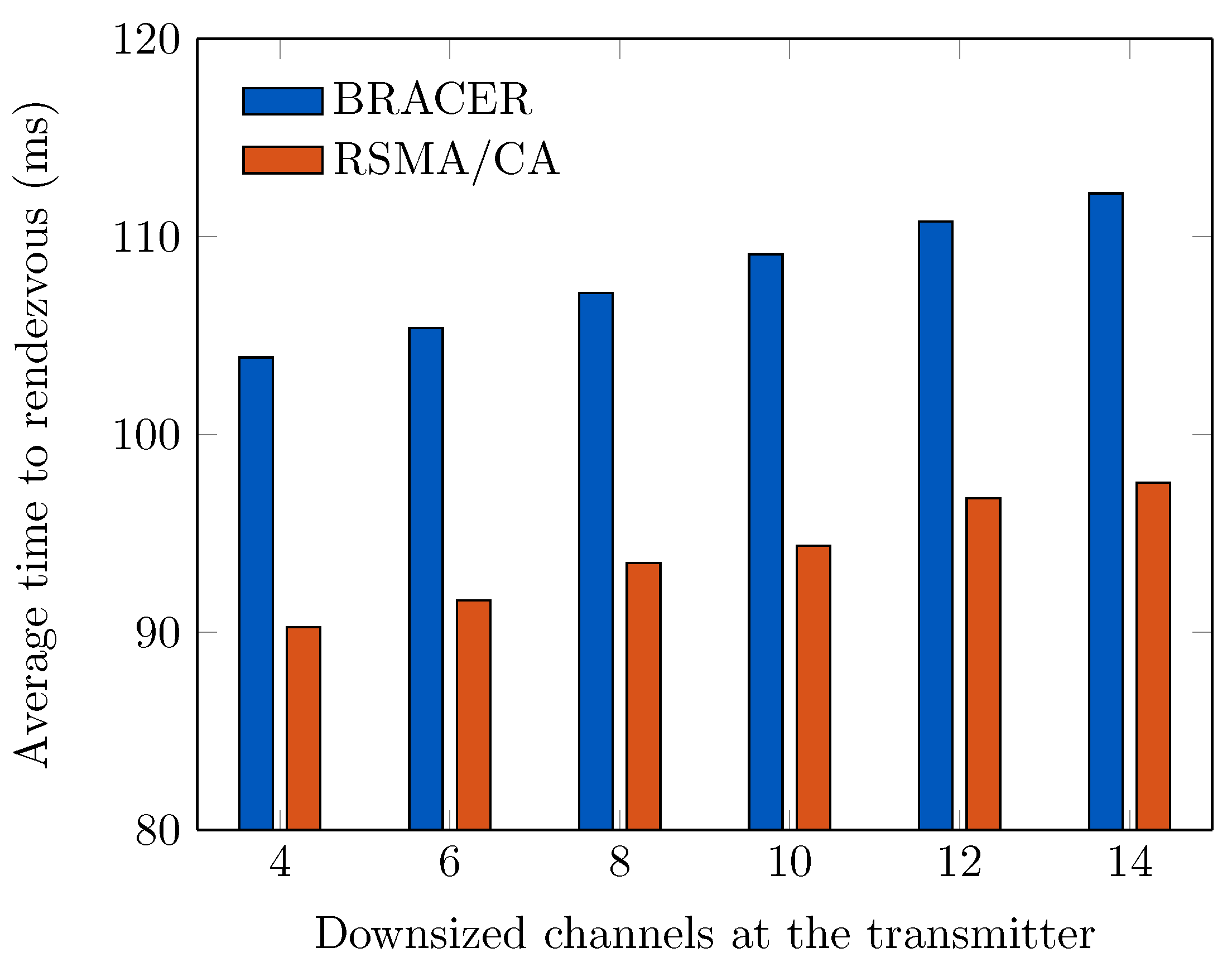
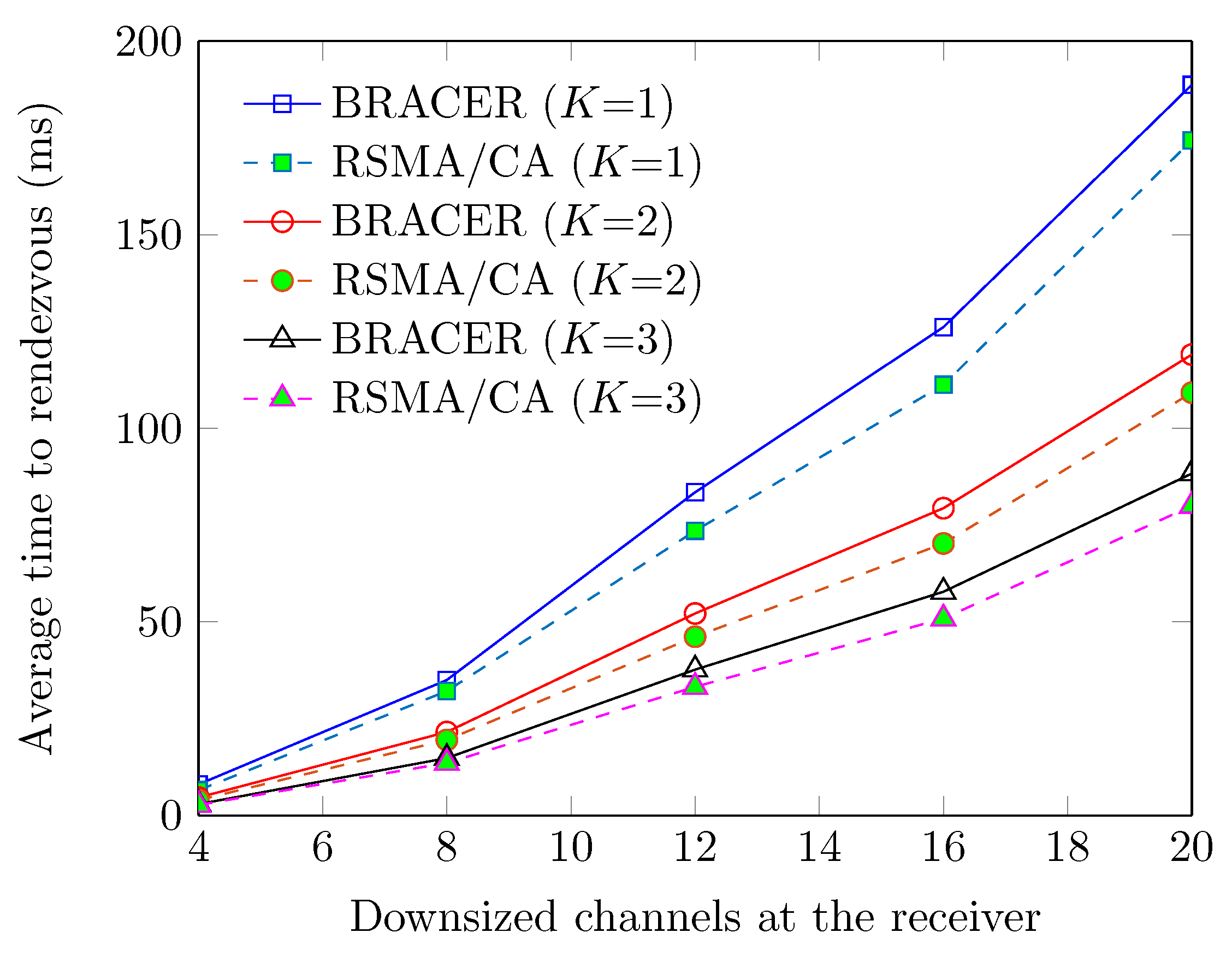
6. Results and Discussion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Evans, D. The Internet of Things: How the Next Evolution of the Internet is Changing Everything; Cisco Internet Business Solutions Group: San Jose, CA, USA, April 2011. [Google Scholar]
- Sizing Up the Internet of Things by CompTIA. Available online: https://www.comptia.org/resources/sizing-up-the-internet-of-things (accessed on 10 December 2018).
- World Population Prospects: The 2012 Revision; Population Division, Department of Economic and Social Affairs, UN: New York, NY, USA, 2013.
- Petrov, V.; Mikhaylov, K.; Moltchanov, D.; Andreev, S.; Fodor, G.; Torsner, J.; Yanikomeroglu, H.; Juntti, M.; Koucheryavy, Y. When IoT keeps people in the loop: A path towards a new global utility. IEEE Commun. Mag. 2019, 57, 114–121. [Google Scholar] [CrossRef]
- Palattella, M.R.; Dohler, M.; Grieco, A.; Rizzo, G.; Torsner, J.; Engel, T.; Ladid, L. Internet of Things in the 5G Era: Enablers, Architecture and Business Models. IEEE J. Sel. Areas Commun. 2016, 34, 510–527. [Google Scholar] [CrossRef]
- Mitola, J.; Maguire, G.Q. Cognitive radio: Making software radios more personal. IEEE Pers. Commun. 1999, 6, 13–18. [Google Scholar] [CrossRef]
- Khan, A.A.; Rachedi, A.; Rehmani, M.H. Cognitive-radio-based internet of things: Applications, architectures, spectrum related functionalities, and future research directions. IEEE Wirel. Commun. 2017, 24, 17–25. [Google Scholar] [CrossRef]
- Chen, Q.; Wong, W.; Motani, M.; Liang, Y. MAC Protocol Design and Performance Analysis for Random Access Cognitive Radio Networks. IEEE J. Sel. Areas Commun. 2013, 31, 2289–2298. [Google Scholar] [CrossRef]
- Ali, A.; Feng, L.; Bashir, A.K.; El-Sappagh, S.H.; Ahmed, S.H.; Iqbal, M.; Raja, G. Quality of Service Provisioning for Heterogeneous Services in Cognitive Radio-enabled Internet of Things. IEEE Trans. Netw. Sci. Eng. 2018. [Google Scholar] [CrossRef]
- Stevenson, C.R.; Chouinard, G.; Lei, Z.; Hu, W.; Shellhammer, S.J.; Caldwell, W. IEEE 802.22: The first cognitive radio wireless regional area network standard. IEEE Commun. Mag. 2009, 47, 130–138. [Google Scholar] [CrossRef]
- Ganesan, G.; Li, Y. Agility improvement through cooperative diversity in cognitive radio. In Proceedings of the IEEE Global Communications Conference, St. Louis, MO, USA, 28 November–2 December 2005; Volume 5, pp. 2505–2509. [Google Scholar]
- Cabric, D.; Tkachenko, A.; Brodersen, R. Spectrum Sensing Measurements of Pilot, Energy, and Collaborative Detection. In Proceedings of the IEEE Military Communications Conference, Washington, DC, USA, 23–25 October 2006; pp. 1–7. [Google Scholar]
- Shafiq, M.; Choi, J.-G. MSMA/CA: Multiple Access Control Protocol for Cognitive Radio-Based IoT Networks. J. Internet Technol. 2019, 20, 301–313. [Google Scholar]
- Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications, IEEE Std 802.11-2007 Part 11. 2007. Available online: https://ieeexplore.ieee.org/servlet/opac?punumber=7786993 (accessed on 25 November 2018).
- Liang, Y.-C.; Zeng, Y.; Peh, E.; Hoang, A.T. Sensing-throughput tradeoff for cognitive radio networks. IEEE Trans. Wirel. Commun. 2008, 7, 1326–1337. [Google Scholar] [CrossRef]
- Manesh, M.R.; Apu, M.S.; Kaabouch, N.; Hu, W. Performance evaluation of spectrum sensing techniques for cognitive radio systems. In Proceedings of the 2016 IEEE 7th Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), New York, NY, USA, 20–22 October 2016; pp. 1–7. [Google Scholar]
- Mauwa, H.; Bagula, A.; Zennaro, M.; Pietrosemoli, E.; Lysko, A.; Brown, T.X. Systematic analysis of geo-location and spectrum sensing as access methods to TV white space. In Proceedings of the IEEE ITU Kaleidoscope: ICTs for a Sustainable World (ITU WT), Bangkok, Thailand, 14–16 November 2016; pp. 1–8. [Google Scholar]
- Chowdhury, K.R.; Akyldiz, I.F. Ofdm-based common control channel design for cognitive radio ad hoc networks. IEEE Trans. Mob. Comput. 2011, 10, 228–238. [Google Scholar] [CrossRef]
- Theis, N.C.; Thomas, R.W.; DaSilva, L.A. Rendezvous for cognitive radios. IEEE Trans. Mob. Comput. 2011, 10, 216–227. [Google Scholar] [CrossRef]
- Zhao, J.; Zheng, H.; Yang, G.-H. Distributed coordination in dynamic spectrum allocation networks. In Proceedings of the First IEEE International Symposium on New Frontiers in Dynamic Spectrum Access Networks (DySPAN 2005), Baltimore, MD, USA, 8–11 November 2005; pp. 259–268. [Google Scholar]
- Brandon, L. A survey of common control channel design in cognitive radio networks. Phys. Commun. 2011, 4, 26–39. [Google Scholar]
- Joshi, G.P.; Nam, S.Y.; Kim, S.W. Rendezvous Issues in AD Hoc Cognitive Radio Networks. KSII Trans. Internet Inf. Syst. 2014, 8, 3655–3673. [Google Scholar]
- DaSilva, L.A.; Guerreiro, I. Sequence-based rendezvous for dynamic spectrum access. In Proceedings of the 2008 3rd IEEE Symposium on New Frontiers in Dynamic Spectrum Access Networks (DySPAN 2008), Chicago, IL, USA, 14–17 October 2008; pp. 1–7. [Google Scholar]
- Tessema, W.B.; Kim, B.; Kim, J.; Cho, W.; Han, K. Channel hopping sequences for rendezvous establishment in cognitive radio sensor networks. Int. J. Distrib. Sens. Netw. 2014, 10, 872780. [Google Scholar] [CrossRef]
- Ukey, A.S.; Chawla, M. Rendezvous in cognitive radio ad hoc networks: A survey. Int. J. Ad Hoc Ubiquitous Comput. 2018, 29, 233–254. [Google Scholar] [CrossRef]
- Bluetooth Core Specification Version 4.0; Specification of the Bluetooth System: Kirkland, WA, USA, 2010.
- Huang, J.; Zhang, Z.; Wang, H.; Liu, H. Video transmission over cognitive radio networks. In Proceedings of the 2011 IEEE GLOBECOM Workshops (GC Wkshps), Houston, TX, USA, 5–9 December 2011; pp. 6–11. [Google Scholar]
- Zheng, H.; Cao, L. Device-centric spectrum management. In Proceedings of the First IEEE International Symposium on New Frontiers in Dynamic Spectrum Access Networks (DySPAN 2005), Baltimore, MD, USA, 8–11 November 2005; Volume 2005, pp. 56–65. [Google Scholar]
- Cao, L.; Zheng, H. Distributed rule-regulated spectrum sharing. IEEE J. Sel. Areas Commun. 2008, 26, 130–145. [Google Scholar] [CrossRef]
- Talat, S.T.; Wang, L.-C. QoS-guaranteed channel selection scheme for cognitive radio networks with variable channel bandwidths. In Proceedings of the 2009 International Conference on Communications, Circuits and Systems (ICCCAS 2009), Milpitas, CA, USA, 23–25 July 2009; pp. 241–245. [Google Scholar]
- Lee, W.-Y.; Akyldiz, I.F. A spectrum decision framework for cognitive radio networks. IEEE Trans. Mob. Comput. 2011, 10, 161–174. [Google Scholar]
- Li, X.; Sun, Y.; Yu, F.R.; Zhao, N. A novel interference alignment scheme based on antenna selection in cognitive radio networks. In Proceedings of the 2013 IEEE Global Communications Conference (GLOBECOM), Atlanta, GA, USA, 9–13 December 2013; pp. 998–1002. [Google Scholar]
- Xu, Y.; Anpalagan, A.; Wu, Q.; Wang, J.; Sheng, L.; Gao, Z. Game-theoretic channel selection for interference mitigation in cognitive radio networks with block-fading channels. In Proceedings of the 2013 IEEE Wireless Communications and Networking Conference (WCNC), Shanghai, China, 7–10 April 2013; pp. 303–308. [Google Scholar]
- Song, Y.; Xie, J. BRACER: A distributed broadcast protocol in multi-hop cognitive radio ad hoc networks with collision avoidance. IEEE Trans. Mob. Comput. 2015, 14, 509–524. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, Q.; Yu, G.; Wang, B. ETCH: Efficient channel hopping for communication rendezvous in dynamic spectrum access networks. In Proceedings of the IEEE INFOCOM, Shanghai, China, 10–15 April 2011; pp. 2471–2479. [Google Scholar]
- Liu, H.; Lin, Z.; Chu, X.; Leung, Y.-W. Jump-stay rendezvous algorithm for cognitive radio networks. IEEE Trans. Parallel Distrib. Syst. 2012, 23, 1867–1881. [Google Scholar] [CrossRef]
- Bian, K. Maximizing rendezvous diversity in rendezvous protocols for decentralized cognitive radio networks. IEEE Trans. Mob. Comput. 2013, 12, 1294–1307. [Google Scholar] [CrossRef]
- Bian, K.; Park, J.-M.; Chen, R. Control channel establishment in cognitive radio networks using channel hopping. IEEE J. Sel. Areas Commun. 2011, 29, 689–703. [Google Scholar] [CrossRef]
- Zhao, Q.; Tong, L.; Swami, A.; Chen, Y. Decentralized cognitive MAC for opportunistic spectrum access in ad hoc networks: A POMDP framework. IEEE J. Sel. Areas Commun. 2007, 25, 589–600. [Google Scholar] [CrossRef]
- Kondareddy, Y.R.; Agrawal, P. Synchronized MAC protocol for multi-hop cognitive radio networks. In Proceedings of the 2008 IEEE International Conference on Communications (ICC’08), Beijing, China, 19–23 May 2008; pp. 3198–3202. [Google Scholar]
- Ali, A.; Kwak, K.S.; Tran, N.H.; Han, Z.; Niyato, D.; Zeshan, F.; Gul, M.T.; Suh, D.Y. RaptorQ-Based Efficient Multimedia Transmission Over Cooperative Cellular Cognitive Radio Networks. IEEE Trans. Veh. Technol. 2018, 67, 7275–7289. [Google Scholar] [CrossRef]
- Kushner, H.J.; Yin, G.G. Stochastic Approximation and Recursive Algorithms and Applications; Springer: Berlin, Germany, 2003. [Google Scholar]
- Chong, J.W.; Sung, Y.; Sung, D.K. RawPEACH: Multiband CSMA/CA-based cognitive radio networks. J. Commun. Netw. 2009, 11, 175–186. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronym | Definition |
|---|---|
| ACK | Acknowledgement |
| AFH | Adaptive Frequency Hopping |
| ATS | Acknowledge to Sense |
| BTS | Beacon to Sense |
| CCC | Common Control Channel |
| CH | Channel Hopping |
| CR | Cognitive Radio |
| CTS | Clear to Sense |
| DIFS | Data Interframe Space |
| GOS | Generated Orthogonal Sequence |
| IoT | Internet-of-Things |
| ISM | Industrial, Scientific, and Medical |
| MC | Modular Clock |
| MMC | Modified Modular Clock |
| NAV | Network Allocation Vector |
| PDU | Payload-Data-Unit |
| PHY | Physical layer |
| POMDP | Partially Observable Markov Decision Process |
| QCH | Quorum-based CH |
| RSMA/CA | Ranked Sense Multiple Access with Collision Avoidance |
| RTS | Request to Sense |
| SBR | Sequence-Based Rendezvous |
| SIFS | Short Interframe Space |
| SNR | Signal-to-Noise-Ratio |
| SS | Spectrum Sensing |
| SUs | Secondary Users |
| TTR | Time to Rendezvous |
| Symbol | Description |
|---|---|
| Hopping sequence for a transmitter SU i | |
| Hopping sequence for a receiver SU j | |
| X | Downsized ranked channel set of an arbitrary SU |
| Y | Size of the downsized ranked channel set of an arbitrary SU |
| Largest prime number such that | |
| , | Active probability of PUs positioned around SU i |
| Inactive probability of PUs positioned around SU i | |
| False alarm probability of sensor in SU i | |
| Misdetection probability of sensor in SU i | |
| Idle probability of rendezvous-channel for SU i | |
| Probability of event (where ) at arbitrary time | |
| Time delay of event (where ) | |
| R | Transmission rate of rendezvous-channel |
| p | Failed transmission probability |
| b | Blocking probability of rendezvous-channel |
| K | Common channels in hopping sequences of SUs i and j |
| C | Number of available channels in CR system |
| M | Maximum number of SUs in the system |
| e | Rendezvous-channel of SUs i and j at arbitrary time |
| H | Header size of PHY and MAC |
| Length of one backoff (or idle) slot | |
| Normalized throughput of RSMA/CA | |
| Transmission trial probability for SU i | |
| k | Backoff stage of an arbitrary SU |
| Size of contention window at k-th stage | |
| N | Backoff process of an arbitrary SU at final stage |
| Initial size of contention window | |
| Final size of contention window | |
| Average length of one system slot | |
| Sensing result of SU i at channel c and period t | |
| Packet transmission probability of SU i to SU j | |
| Occurrence probability of a transmission slot | |
| Occurrence probability of a no-transmission slot | |
| Occurrence probability of an empty slot | |
| D | Average size of one packet payload for an arbitrary SU |
| Time | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 0 | 25 | 1 | - | - | 0 | 1 | 20 | 1 | 1 | 25 | ||||
| 0 | 0 | 28 | 0 | - | - | 1 | 0 | 23 | 1 | 0 | 34 | ||||
| 0 | 1 | 10 | 1 | - | - | 0 | 0 | 10 | 0 | 0 | 17 | ||||
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ |
| 1 | 1 | 27 | 0 | - | - | 0 | 0 | 25 | 1 | 0 | 32 | ||||
| 0 | 0 | 10 | 1 | - | - | 1 | 1 | −7 | 0 | 0 | −5 |
| Parameter Name | Value |
|---|---|
| PHY header | 120 bits |
| MAC header | 272 bits |
| PDU size | 8184 bits |
| BTS/RTS | 160 bits + PHY header |
| ATS/CTS/ACK | 112 bits + PHY header |
| Number of common channels (K) | 1 |
| Downsized channel set size Y in Tx (Rx) | 2(3) |
| Misdetection probability threshold () | 0.1 |
| SIFS interval | 10 s |
| DIFS interval | 50 s |
| Backoff slot interval () | 20 s |
| Spectrum sensing interval | 0.5 ms |
| Final backoff stage (N) | 5 |
| Initial contention window size () | 32 |
| Final contention window size () | 1024 |
| Rendezvous-channel transmission rate (R) | 1 Mbps |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shafiq, M.; Singh, P.; Ashraf, I.; Ahmad, M.; Ali, A.; Irshad, A.; Khalil Afzal, M.; Choi, J.-G. Ranked Sense Multiple Access Control Protocol for Multichannel Cognitive Radio-Based IoT Networks. Sensors 2019, 19, 1703. https://doi.org/10.3390/s19071703
Shafiq M, Singh P, Ashraf I, Ahmad M, Ali A, Irshad A, Khalil Afzal M, Choi J-G. Ranked Sense Multiple Access Control Protocol for Multichannel Cognitive Radio-Based IoT Networks. Sensors. 2019; 19(7):1703. https://doi.org/10.3390/s19071703
Chicago/Turabian StyleShafiq, Muhammad, Pankaj Singh, Imran Ashraf, Maqbool Ahmad, Amjad Ali, Azeem Irshad, Muhammad Khalil Afzal, and Jin-Ghoo Choi. 2019. "Ranked Sense Multiple Access Control Protocol for Multichannel Cognitive Radio-Based IoT Networks" Sensors 19, no. 7: 1703. https://doi.org/10.3390/s19071703
APA StyleShafiq, M., Singh, P., Ashraf, I., Ahmad, M., Ali, A., Irshad, A., Khalil Afzal, M., & Choi, J.-G. (2019). Ranked Sense Multiple Access Control Protocol for Multichannel Cognitive Radio-Based IoT Networks. Sensors, 19(7), 1703. https://doi.org/10.3390/s19071703