Accurate Measurement Calculation Method for Interferometric Radar Altimeter-Based Terrain Referenced Navigation †

 , , and
, , and
Abstract
:1. Introduction
2. Comparison of TRN Based on RA and IRA
2.1. TRN Using RA
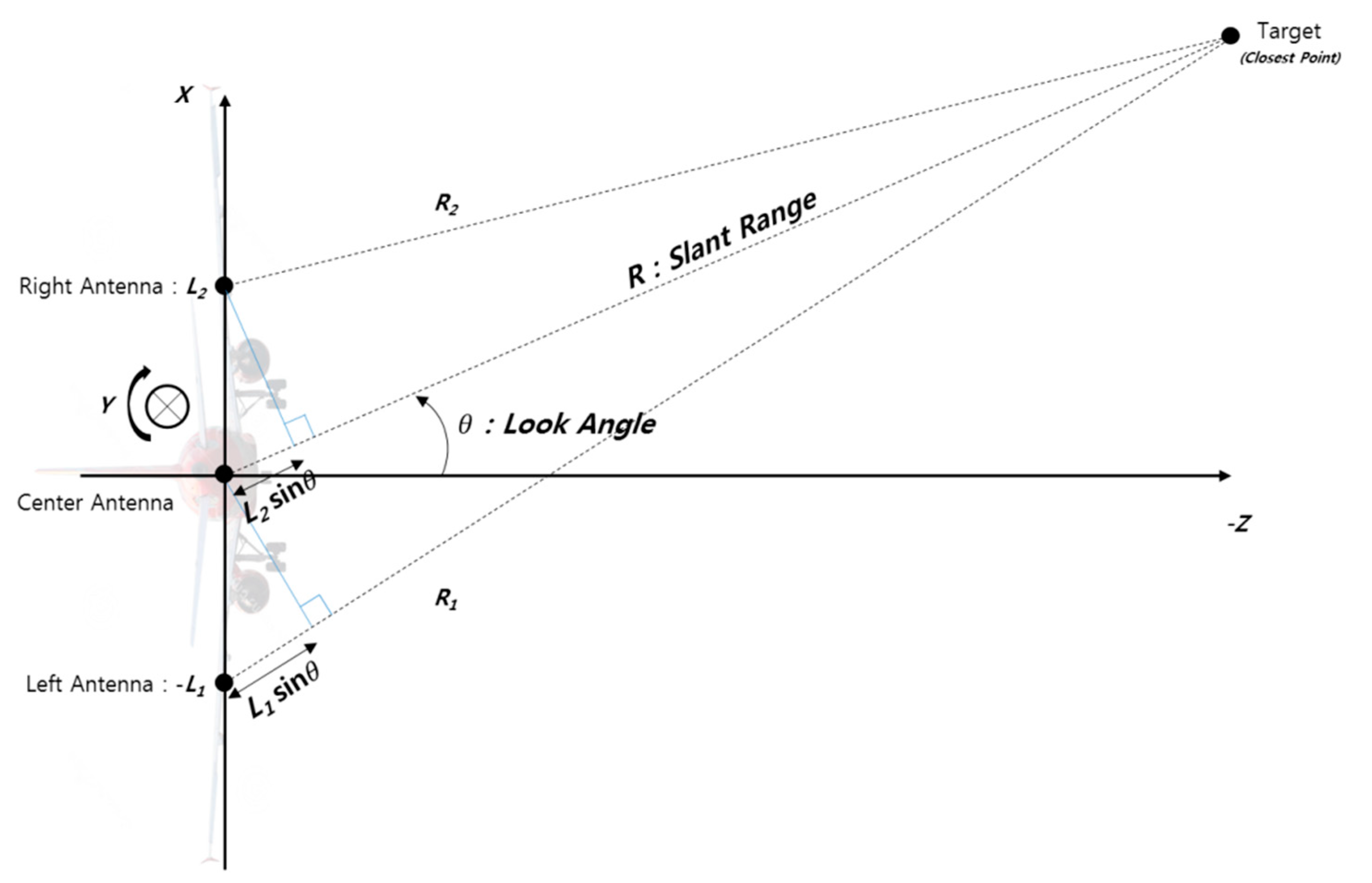
2.2. TRN Using IRA
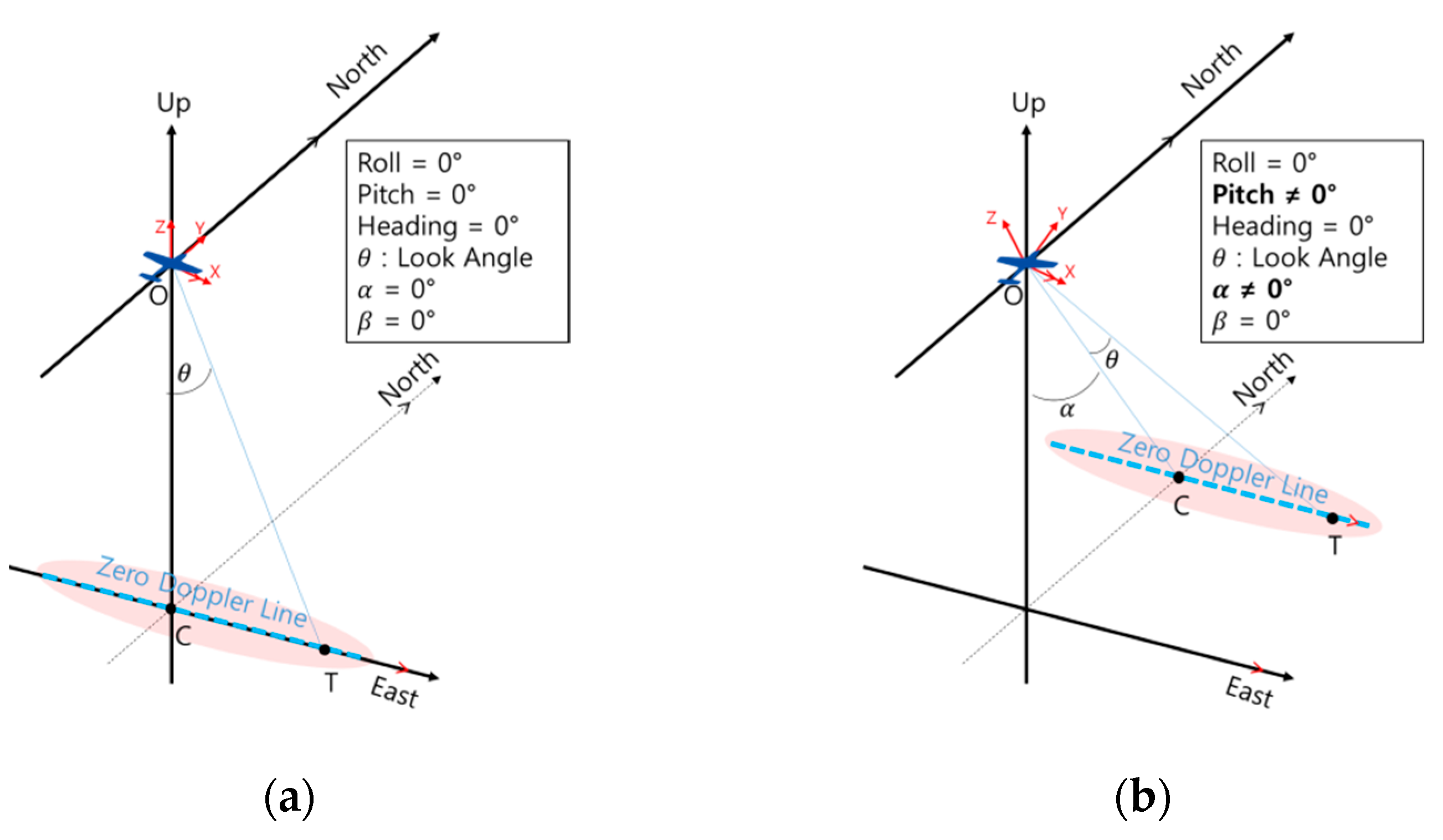
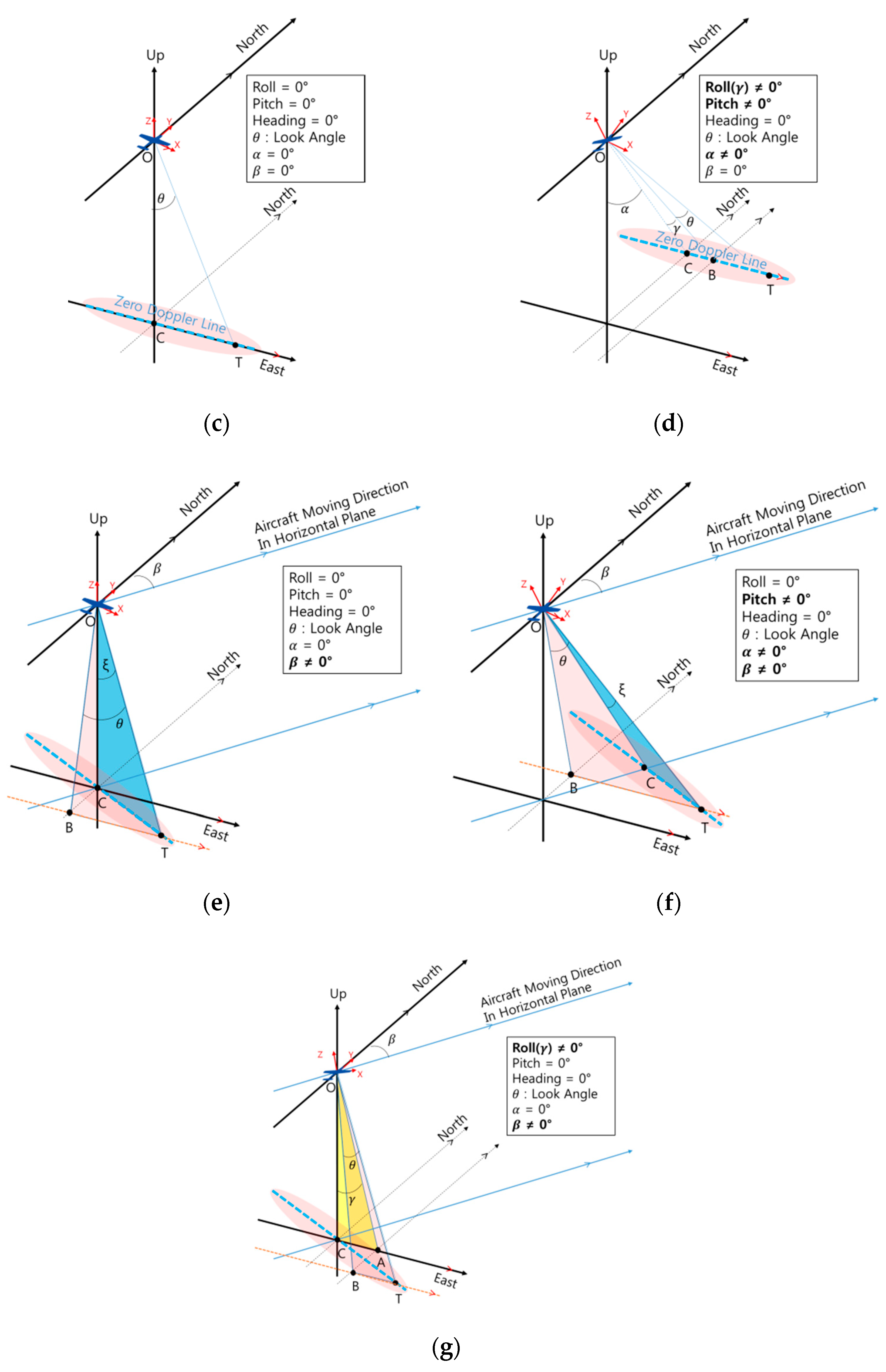
3. Relative Position Measurement Calculation Method Using IRA Output
3.1. Simple Method
3.2. Conventional Method
3.3. Proposed Method
4. Performance Evaluation
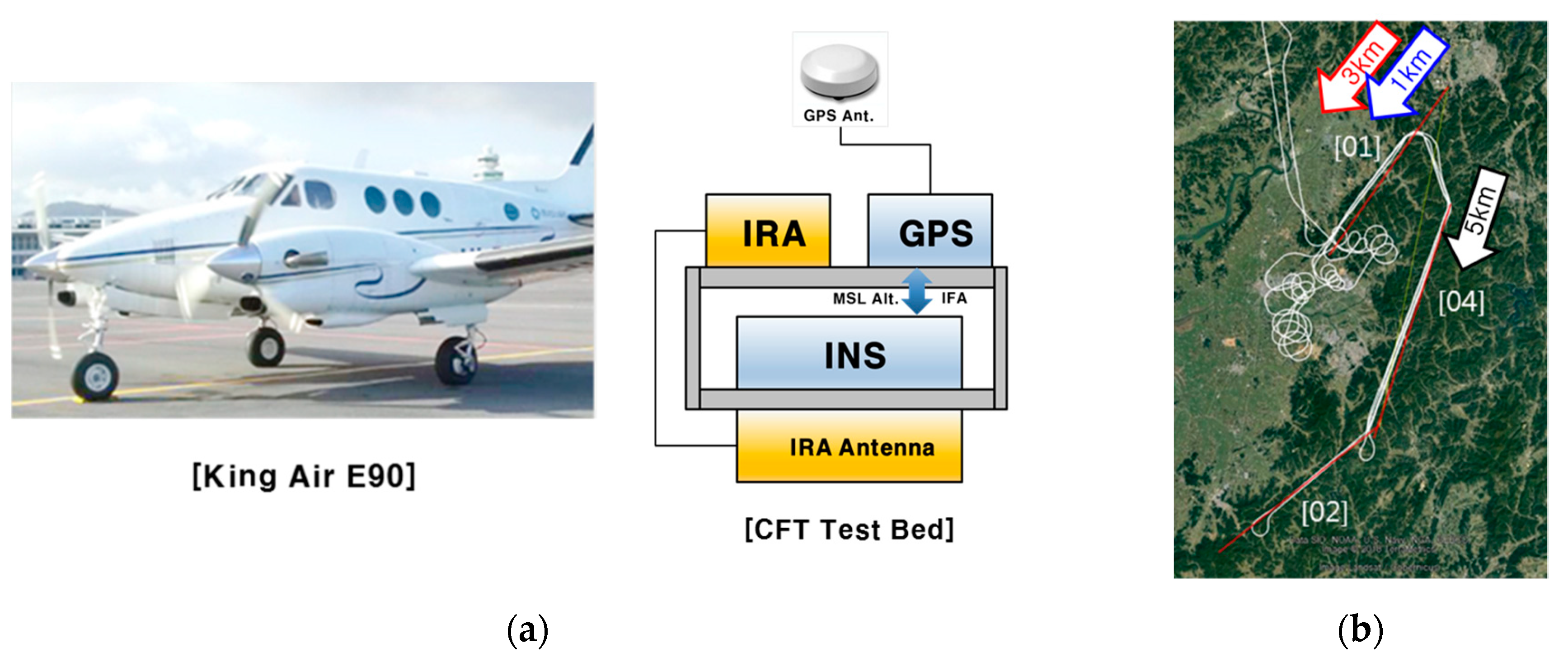
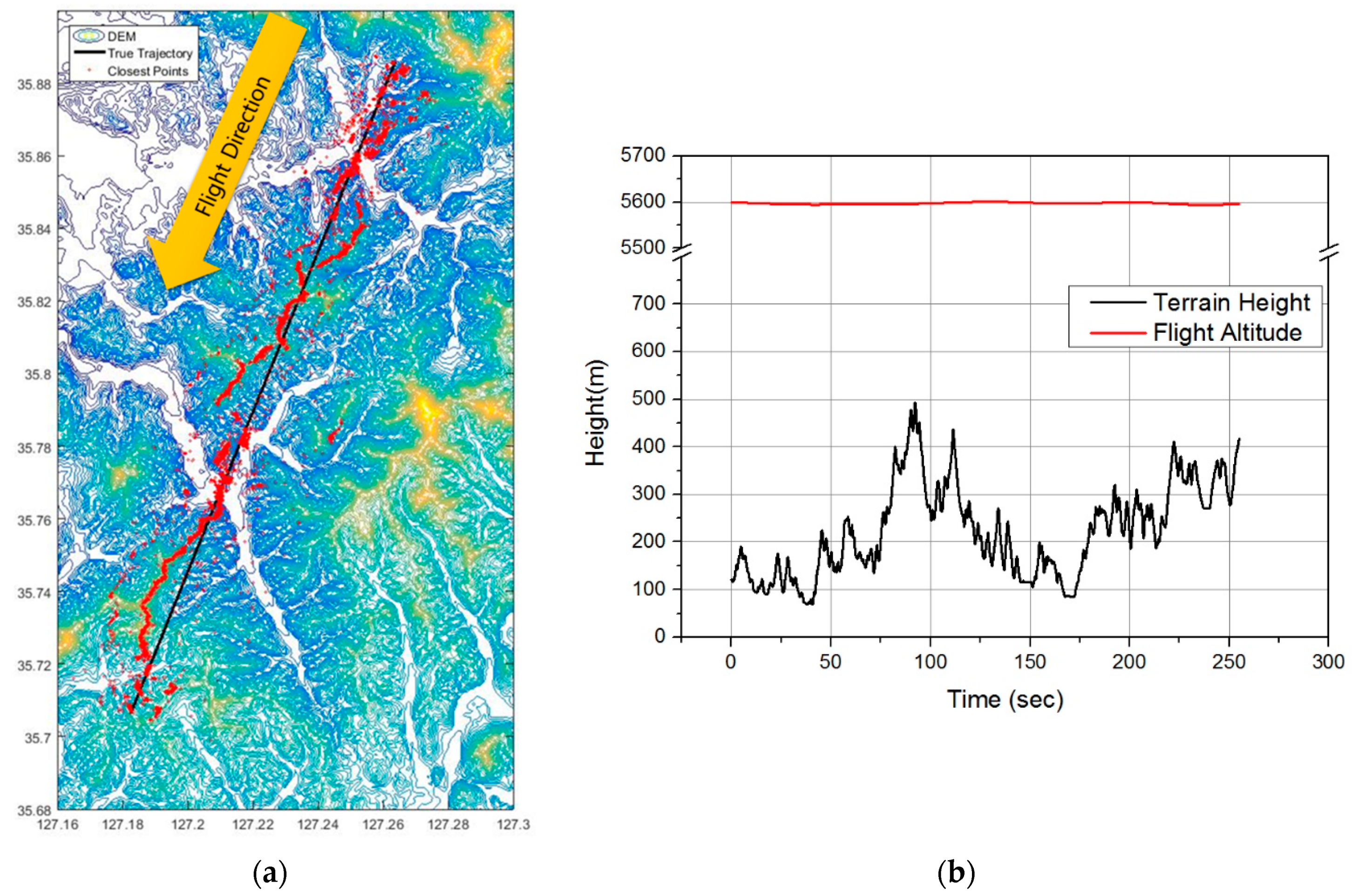
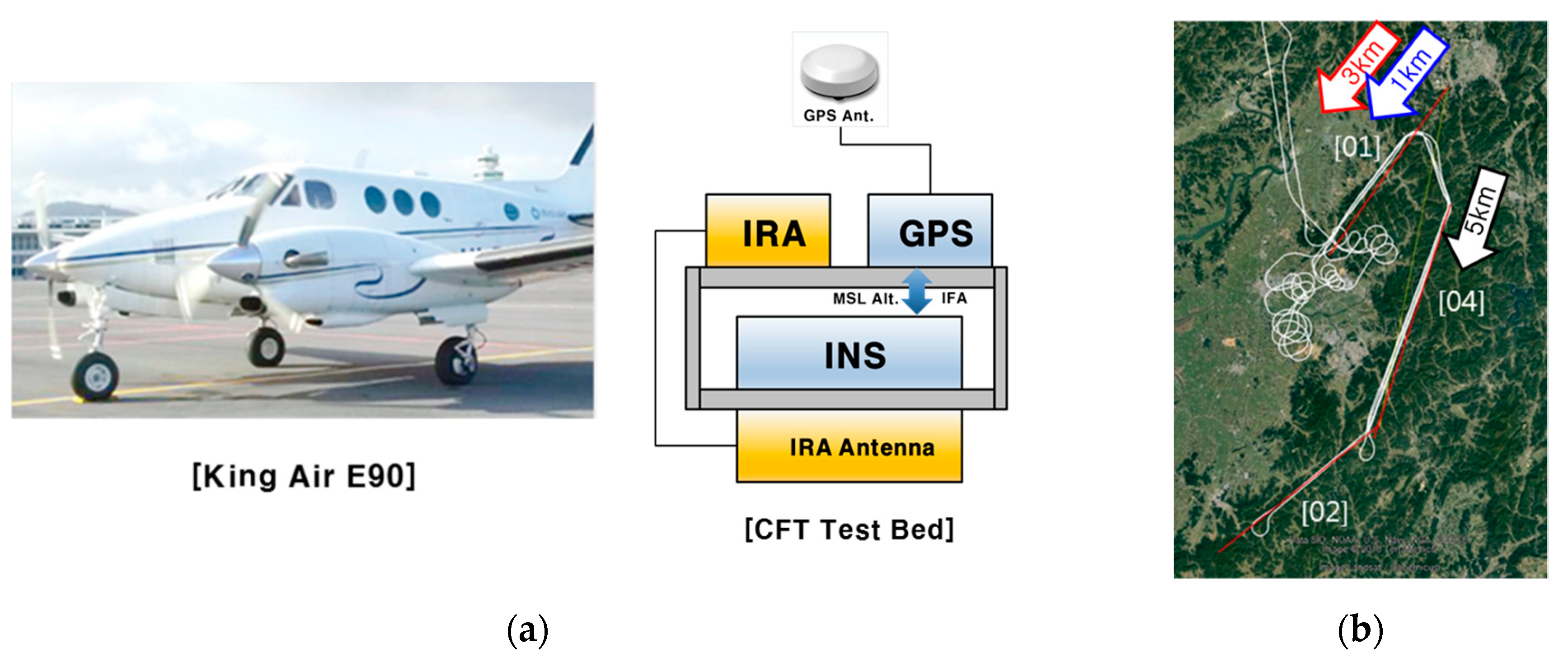
4.1. Flight Test Preparation
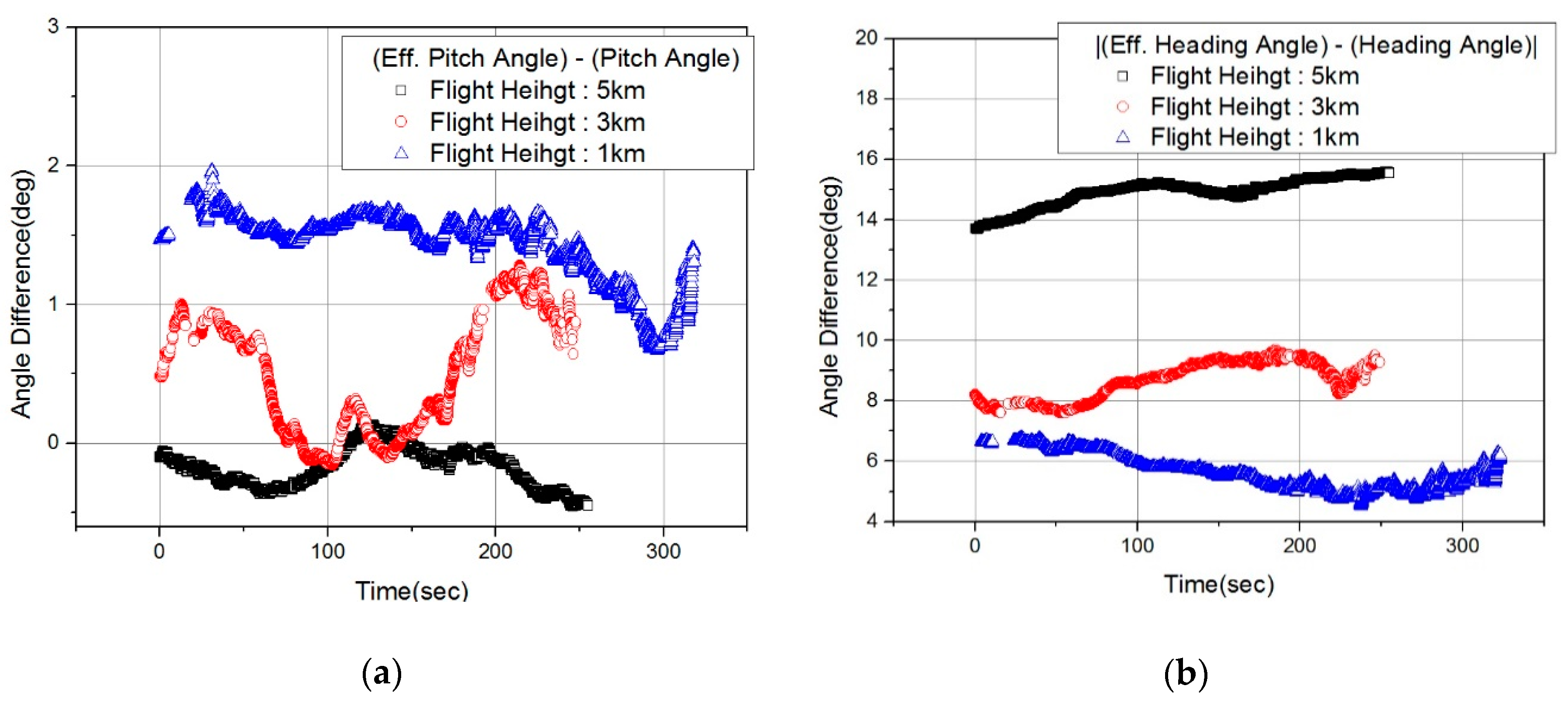
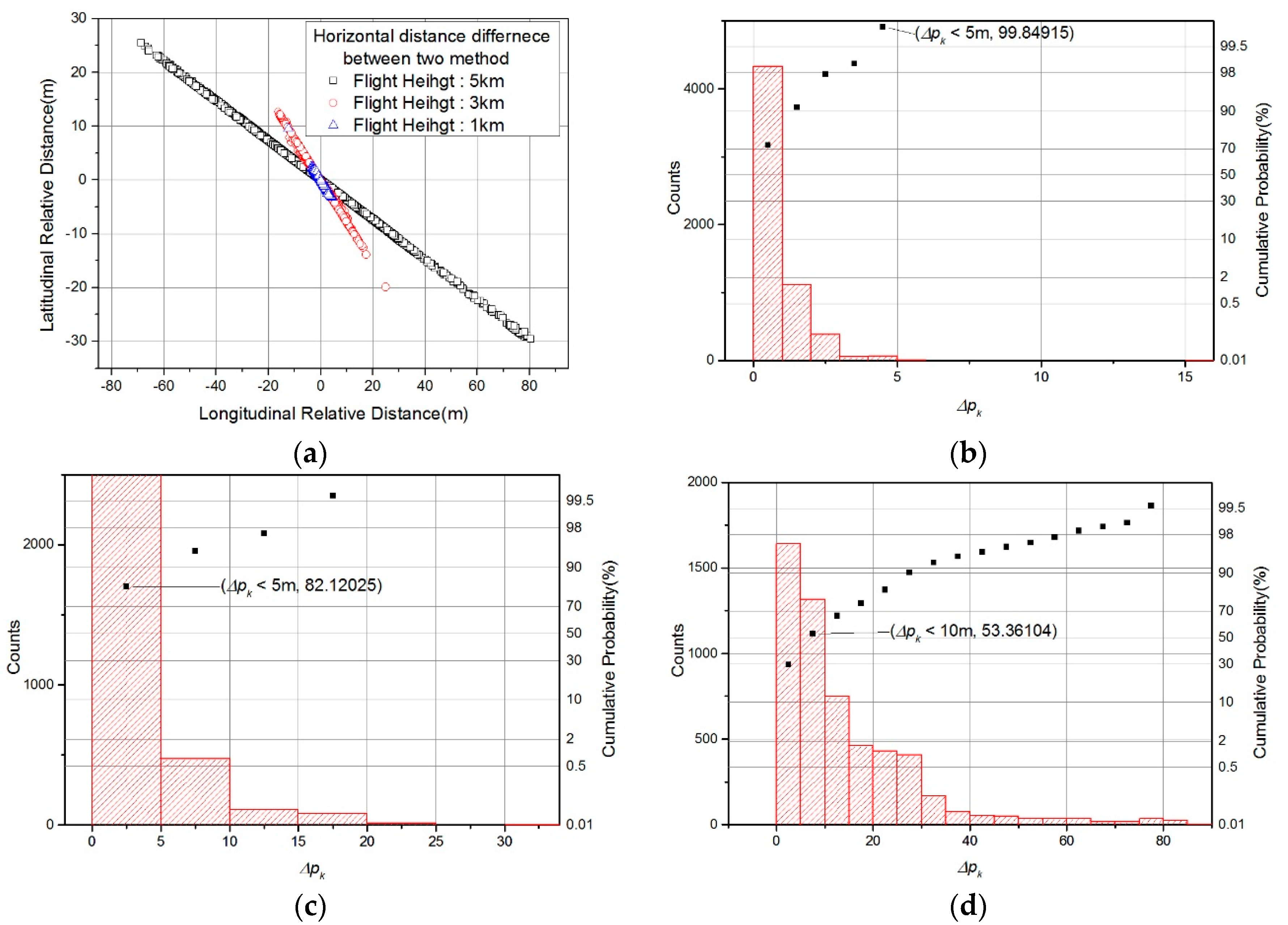
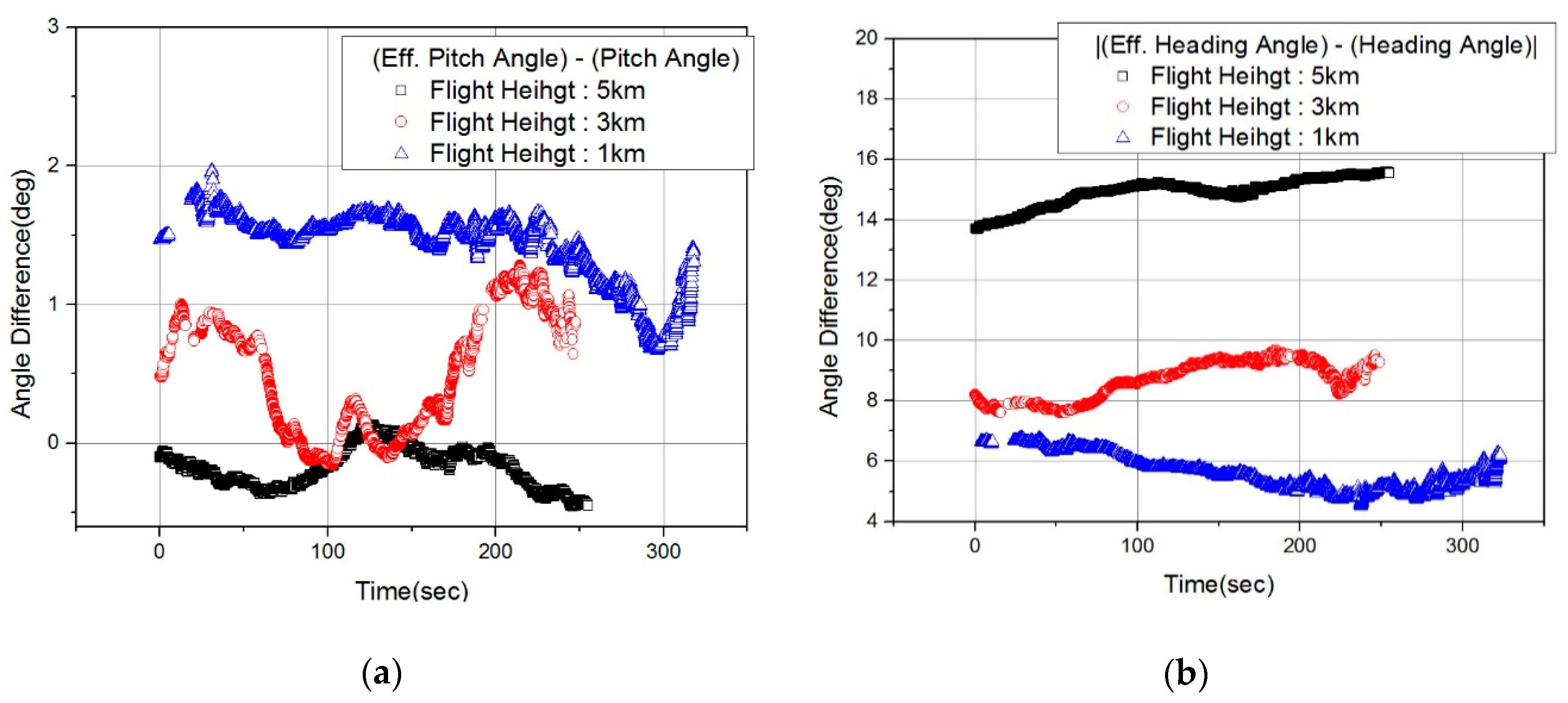
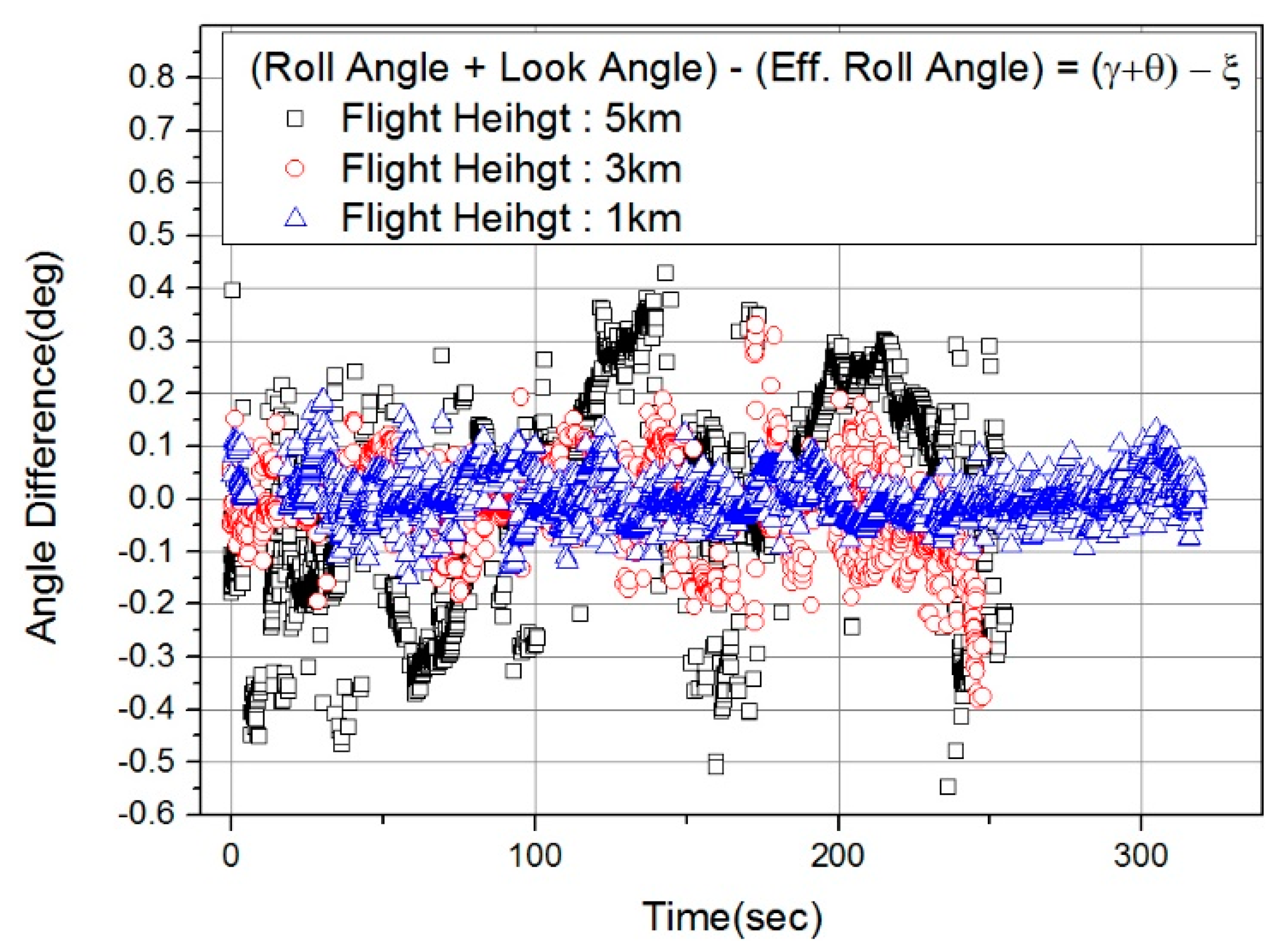
4.2. Flight Test Data Analysis
4.3. TRN Simulation Conditions
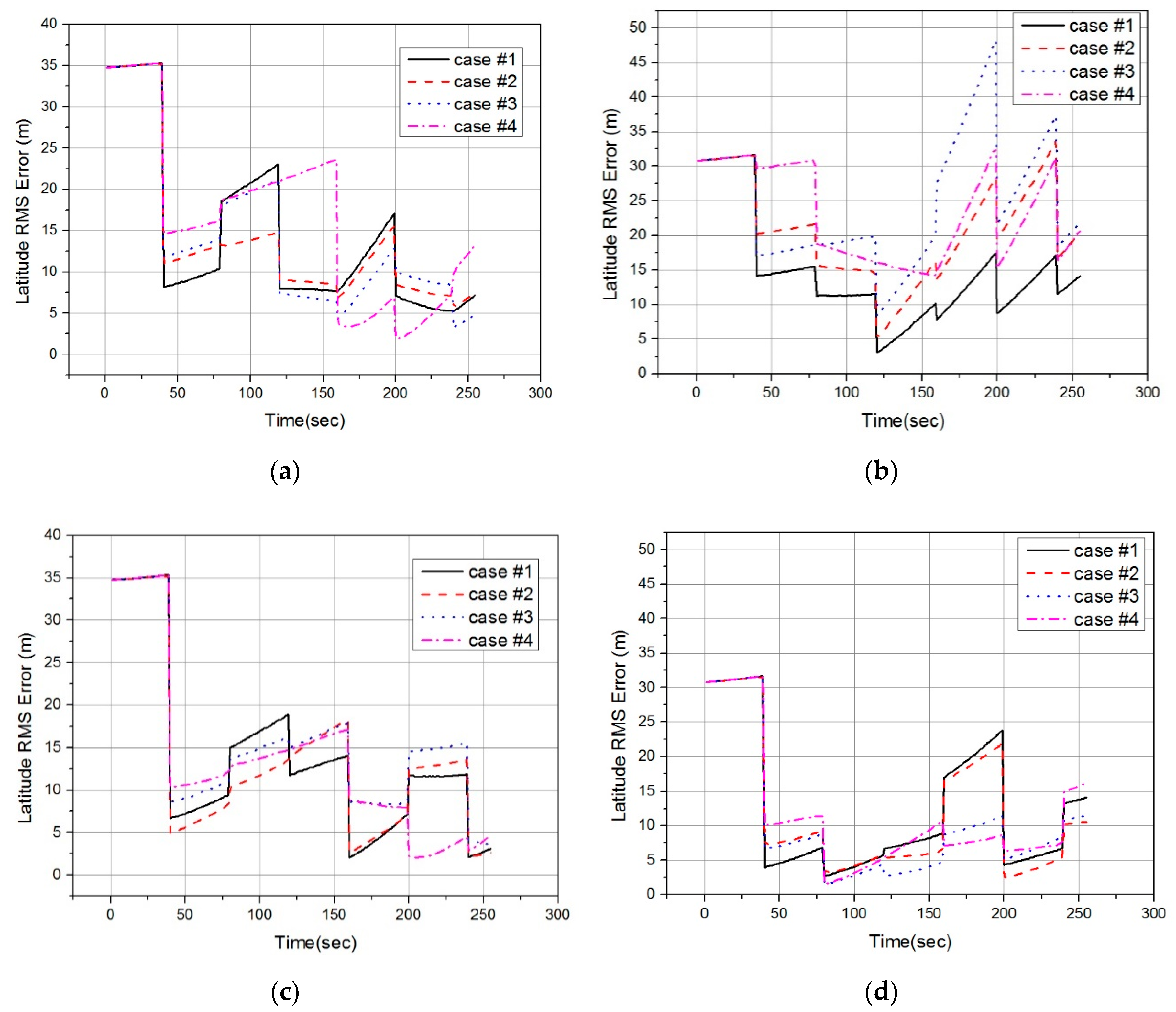
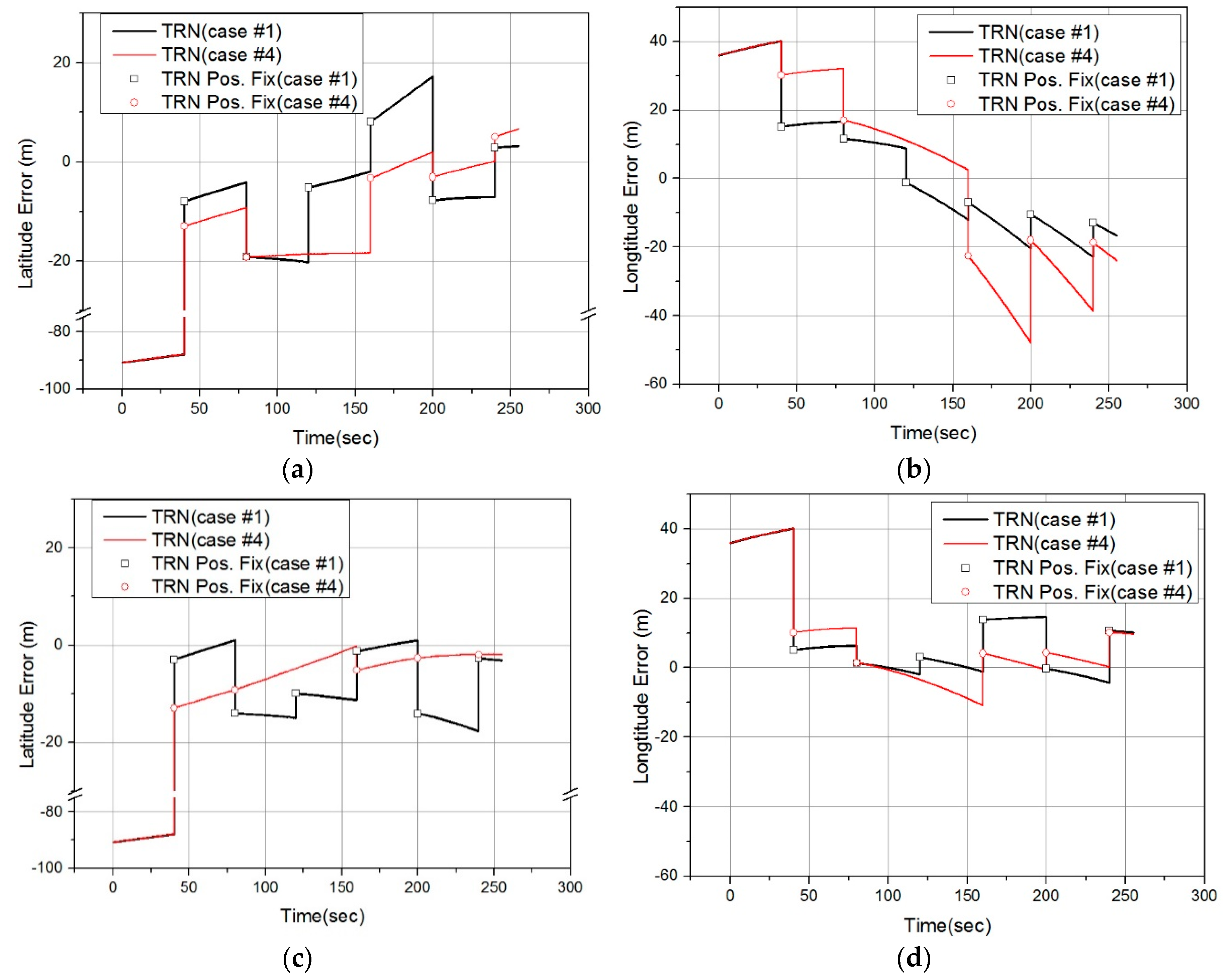
4.4. TRN Simulation Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Siouris, G.M. Missile Guidance and Control Systems; Springer Science & Business Media: New York, NY, USA, 2004; pp. 524, 551–576. [Google Scholar]
- Taurus Systems Gmh. Available online: www.taurus-systems.de (accessed on 16 January 2019).
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems, 2nd ed.; Artech House: Boston, MA, USA, 2013; p. 535. [Google Scholar]
- Raney, R.K. The delay/Doppler radar altimeter. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1578–1588. [Google Scholar]
- Honeywell. Available online: https://aerocontent.honeywell.com/aero/common/documents/ myaerospacecatalog-documents/MilitaryAC/PTAN.pdf (accessed on 16 January 2019).
- Rosen, P.A.; Hensley, S.; Joughin, I.R.; Li, F.K.; Madsen, S.N.; Rodriguez, E.; Goldstein, R.M. Synthetic aperture radar interferometry. Available online: https://trs.jpl.nasa.gov/handle/2014/20793 (accessed on 6 April 2019).
- Lee, D.T.; Jung, H.S.; Yoon, G.W. An Efficient Interferometric Radar Altimeter (IRA) Signal Processing to Extract Precise Three-dimensional Ground Coordinates. Korean J. Remote Sens. 2011, 27, 507–520. [Google Scholar] [CrossRef]
- Jeong, S.-H.; Yoon, J.H.; Park, M.-G.; Kim, D.-Y.; Sung, C.-K.; Kim, H.-S.; Kim, Y.-H.; Kwak, H.-J.; Sun, W.; Yoon, K.J. A performance analysis of terrain-aided navigation (TAN) algorithms using interferometric radar altimeter. J. Korean Soc. Aeronaut. Space Sci. 2012, 40, 285–291. [Google Scholar]
- Kim, H.S.; Sung, C.K.; Yoo, K.J. Simulation for the TRN using Interferometric Radar Altimeter and PMF. In Proceedings of the 2011 KSAS Spring Conference, Yongpyong, Korea, 9–11 April 2011; pp. 212–216. [Google Scholar]
- Kim, Y.; Park, J.; Bang, H. Terrain-Referenced Navigation using an Interferometric Radar Altimeter. Navig. J. Inst. Navig. 2018, 65, 157–167. [Google Scholar] [CrossRef]
- Sung, C.K.; Nam, S.H.; Yu, M.J. Terrain Referenced Navigation Based on Robust Point Mass Filter Using Variance Adjusted Discrete Normal PDF and Mean Valued Likelihood. In Proceedings of the ION 2017 Pacific PNT Meeting, Honolulu, HI, USA, 1–4 May 2017; pp. 126–136. [Google Scholar]
- Oh, J.; Sung, C.K.; Lee, J.S.; Yu, M.J. A new method to calculate relative distance of closest terrain point using interferometric radar altimeter output in real flight environment. In Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 23–26 April 2018; pp. 141–148. [Google Scholar]
- Paek, I.; Lee, S.; Yoo, K.; Jang, J.H. An Implementation of Interferometric Radar Altimeter Simulator. J. Korean Inst. Electromagn. Eng. Sci. 2015, 26, 81–87. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trajectory (km) | Average Flight Height (m) | Average Terrain Elevation (m) | Flight Time (s) | Flight Distance (km) | Average Flight Velocity (m/s) |
|---|---|---|---|---|---|
| 1 | 1560 | 140 | 318 | 27 | 86 |
| 3 | 3640 | 130 | 248 | 21 | 85 |
| 5 | 5600 | 220 | 255 | 21 | 83 |
| Object | Parameters | Value |
|---|---|---|
| Accelerometer | Bias (1σ) | 50 μg |
| Random Walk (1σ) | 10 μg | |
| Gyroscope | Bias (1σ) | 0.005 °/h |
| Random Walk (1σ) | 0.005 °/ | |
| Initial Position Error | Latitude, Longitude, Height (1σ) | 30 m, 30 m, 15 m |
| Initial Velocity Error | E, N, U (1σ) | 0.1 m/s |
| Initial attitude Error | Roll, Pitch, Heading (1σ) | 0.05 mrad, 0.05 mrad, 1 mrad |
| Batch Processing TRN | Resolution of Ref. Matrix | 5 m |
| Size of Ref. Matrix | 101 × 101 | |
| Correlation Algorithm | MAD | |
| Position Fix Period | 40 s | |
| DEM | Resolution | 0.3 arcsec, (10 m) |
| IRA | Output Frequency | 50 Hz |
| INS / TRN CF | Execution cycle | 50 Hz |
| Measurement noise (R) | (10 m)2 |
| Case #1 | Case #2 | Case #3 | Case #4 | |
|---|---|---|---|---|
| IRA output used in simulation | All Data | > 5 m | > 10 m | > 15 m |
| Calculation Method | Error | Average RMS Error (m) | |||
|---|---|---|---|---|---|
| Case #1 | Case #2 | Case #3 | Case #4 | ||
| Conventional method | Latitude Error | 10.08 | 9.35 | 10.43 | 12.61 |
| Longitude Error | 10.02 | 15.92 | 19.46 | 21.69 | |
| Position Error | 14.21 | 18.46 | 22.08 | 25.09 | |
| Proposed method | Latitude Error | 9.60 | 9.11 | 11.46 | 10.05 |
| Longitude Error | 9.58 | 8.91 | 6.73 | 9.64 | |
| Position Error | 13.56 | 12.74 | 13.29 | 13.93 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oh, J.; Sung, C.-K.; Lee, J.; Lee, S.W.; Lee, S.J.; Yu, M.-J. Accurate Measurement Calculation Method for Interferometric Radar Altimeter-Based Terrain Referenced Navigation. Sensors 2019, 19, 1688. https://doi.org/10.3390/s19071688
Oh J, Sung C-K, Lee J, Lee SW, Lee SJ, Yu M-J. Accurate Measurement Calculation Method for Interferometric Radar Altimeter-Based Terrain Referenced Navigation. Sensors. 2019; 19(7):1688. https://doi.org/10.3390/s19071688
Chicago/Turabian StyleOh, Juhyun, Chang-Ky Sung, Jungshin Lee, Sang Woo Lee, Sang Jeong Lee, and Myeong-Jong Yu. 2019. "Accurate Measurement Calculation Method for Interferometric Radar Altimeter-Based Terrain Referenced Navigation" Sensors 19, no. 7: 1688. https://doi.org/10.3390/s19071688
APA StyleOh, J., Sung, C.-K., Lee, J., Lee, S. W., Lee, S. J., & Yu, M.-J. (2019). Accurate Measurement Calculation Method for Interferometric Radar Altimeter-Based Terrain Referenced Navigation. Sensors, 19(7), 1688. https://doi.org/10.3390/s19071688