Tracking and Estimation of Multiple Cross-Over Targets in Clutter


Abstract
1. Introduction
2. Target Model
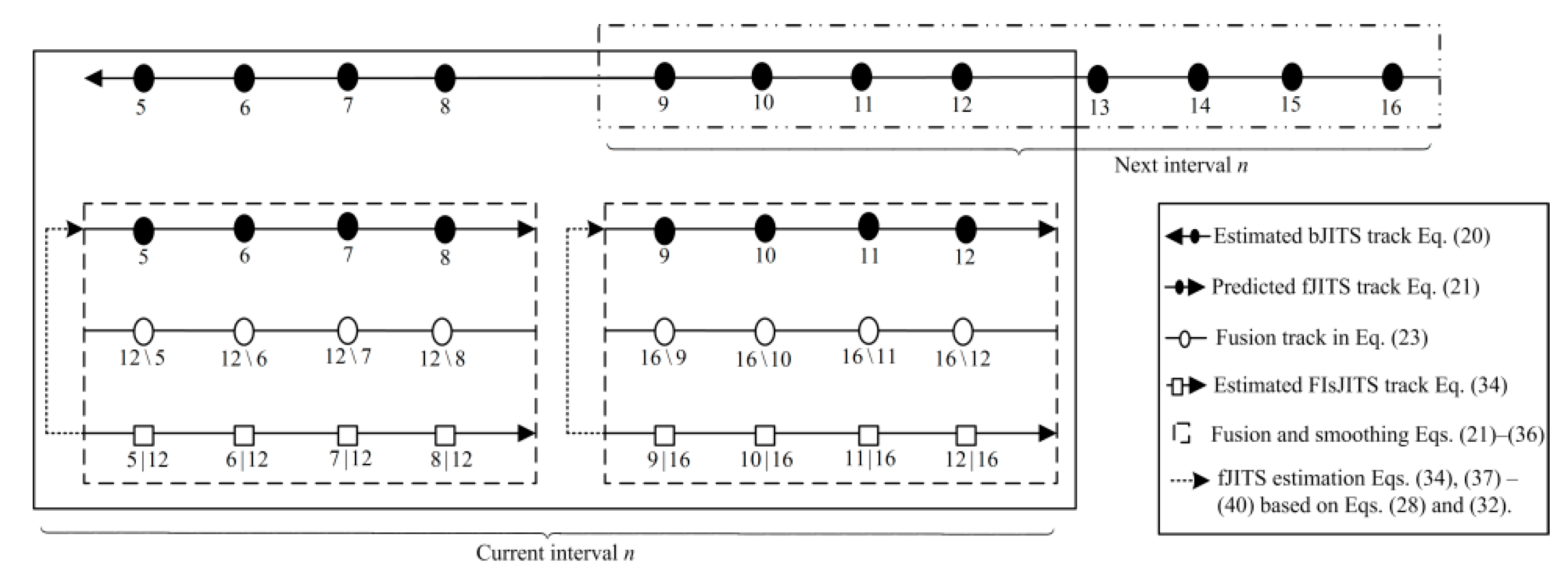
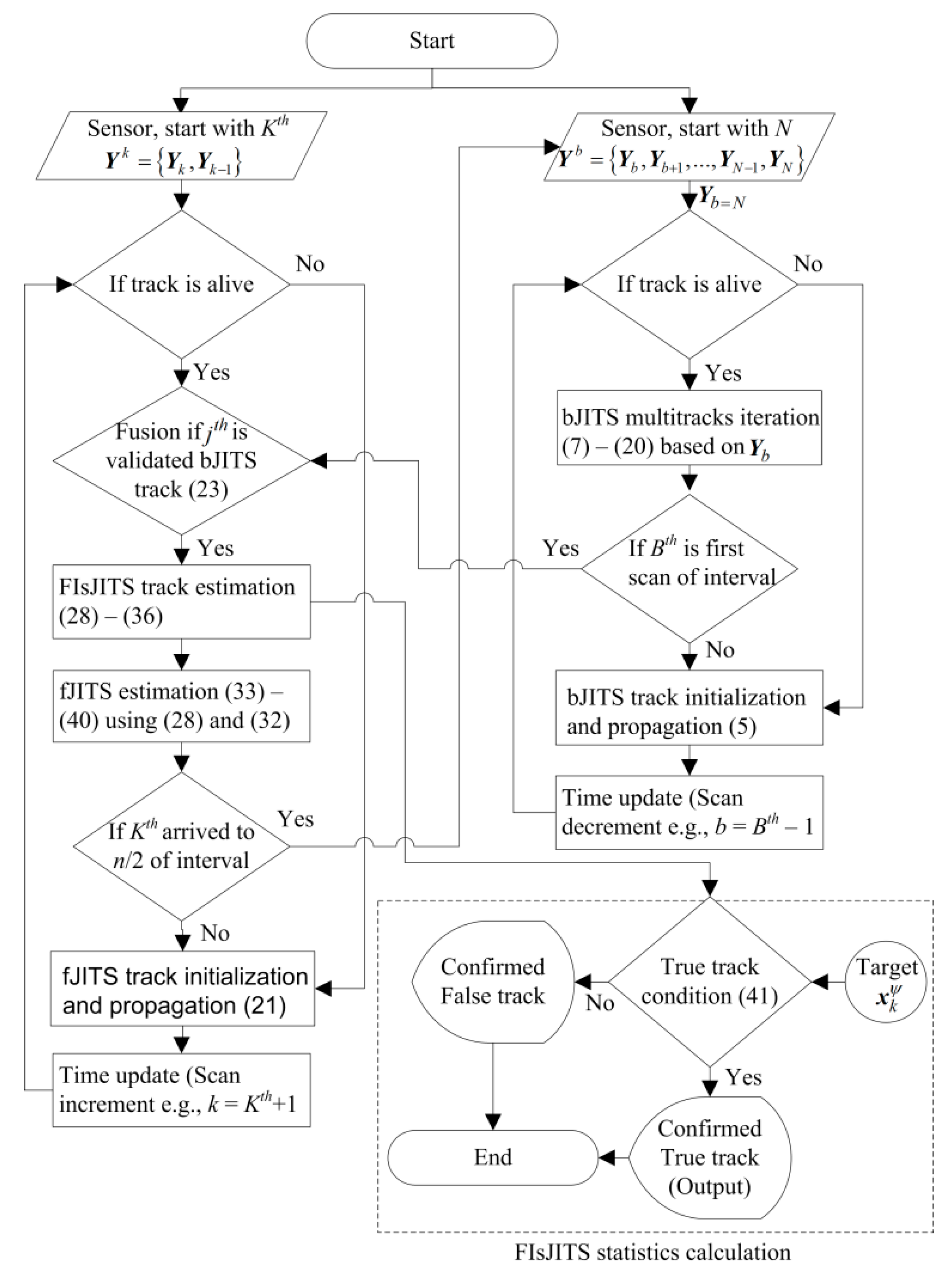
3. Smoothing Multi-Target Using Joint Integrated Track Splitting (FIsJITS)
3.1. Backward Joint Integrated Track Splitting (bJITS)
3.2. Forward Joint Integrated Track Splitting (fJITS)
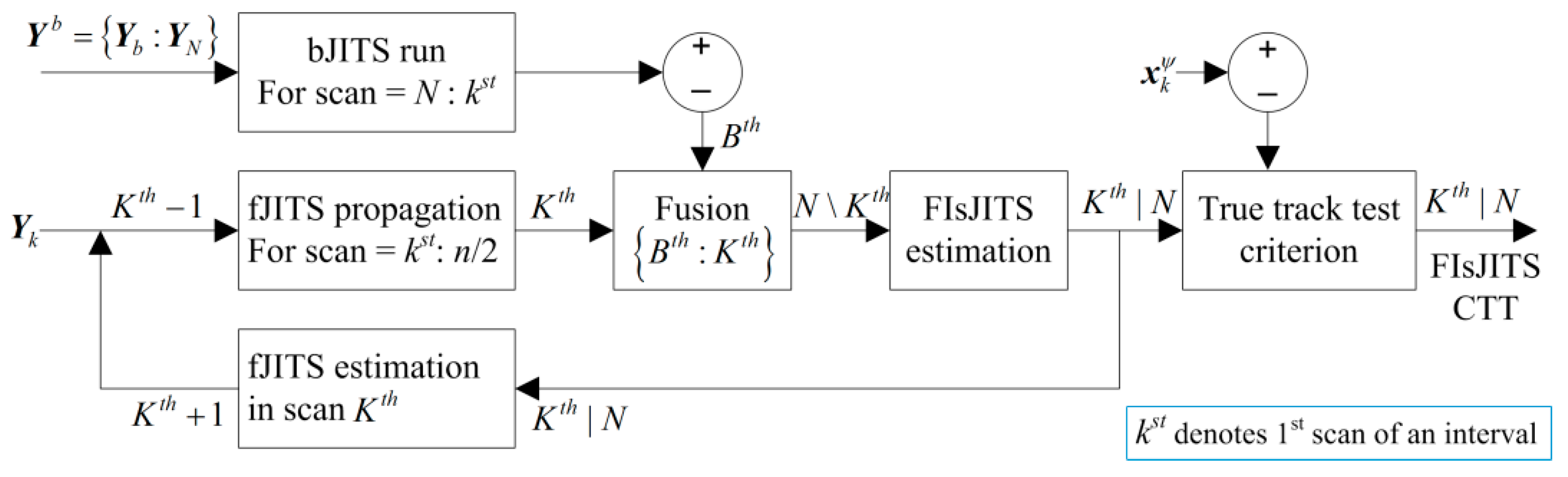
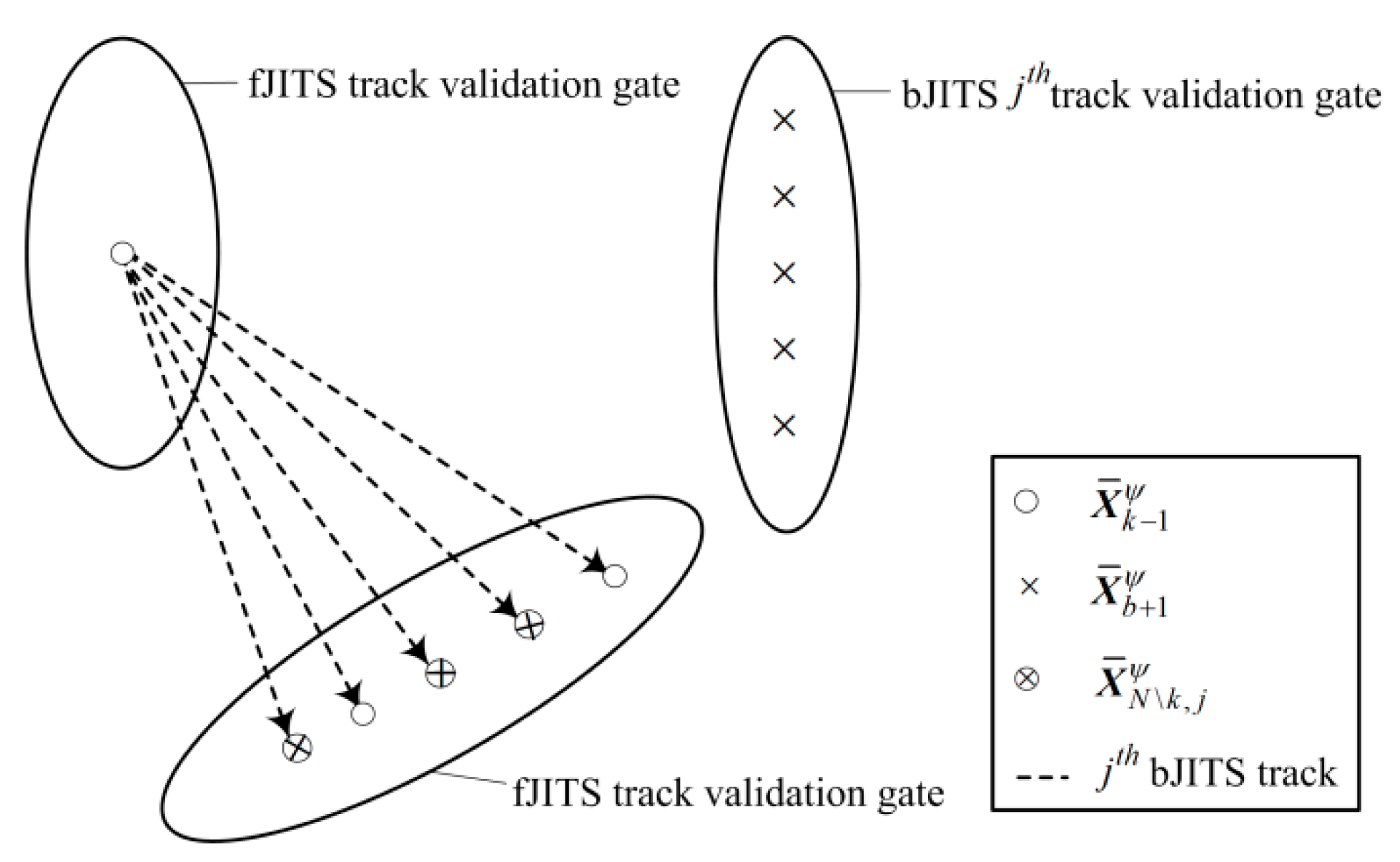
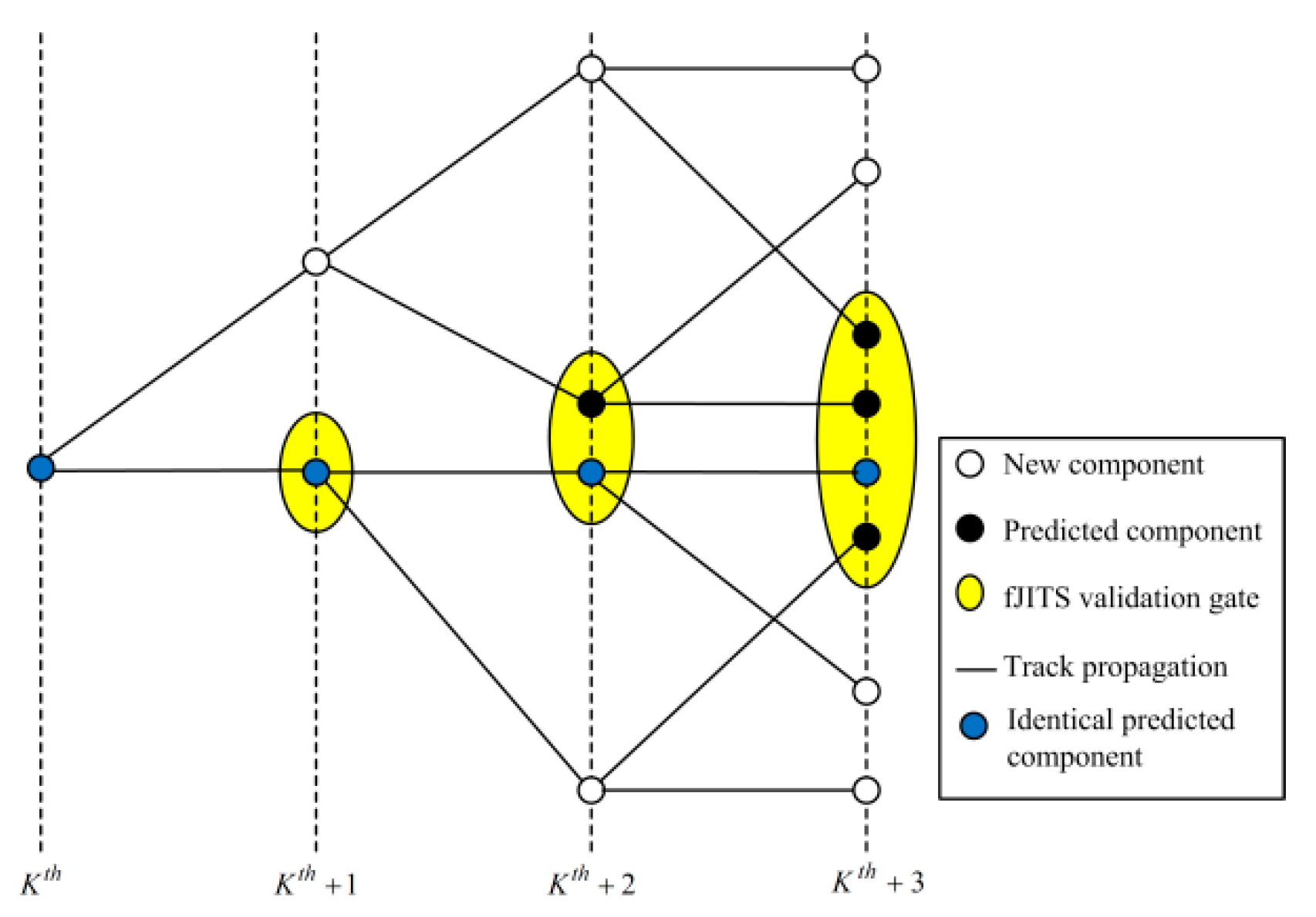
3.3. Fixed-Interval Smoothing JITS (FIsJITS) and fJITS Estimations
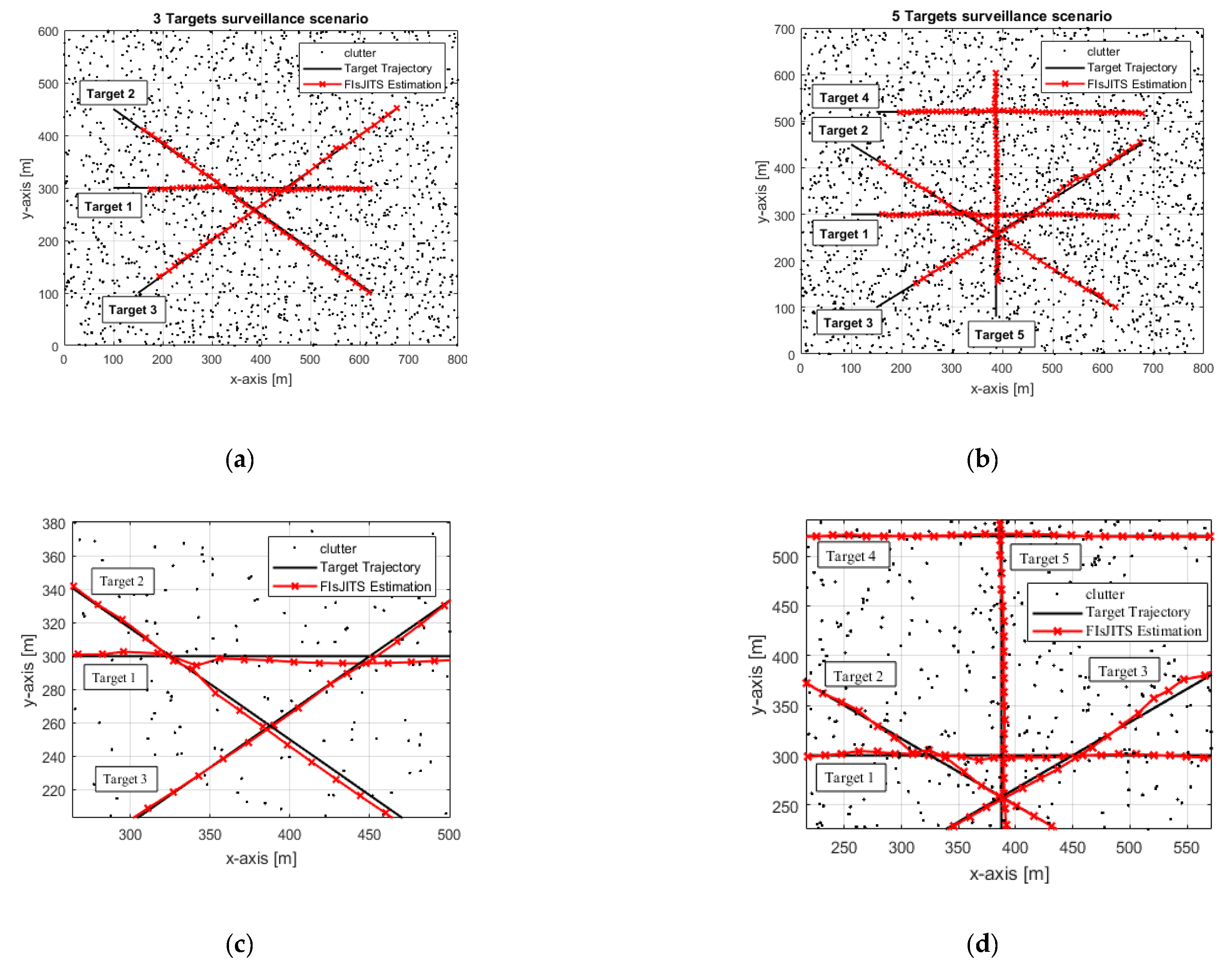
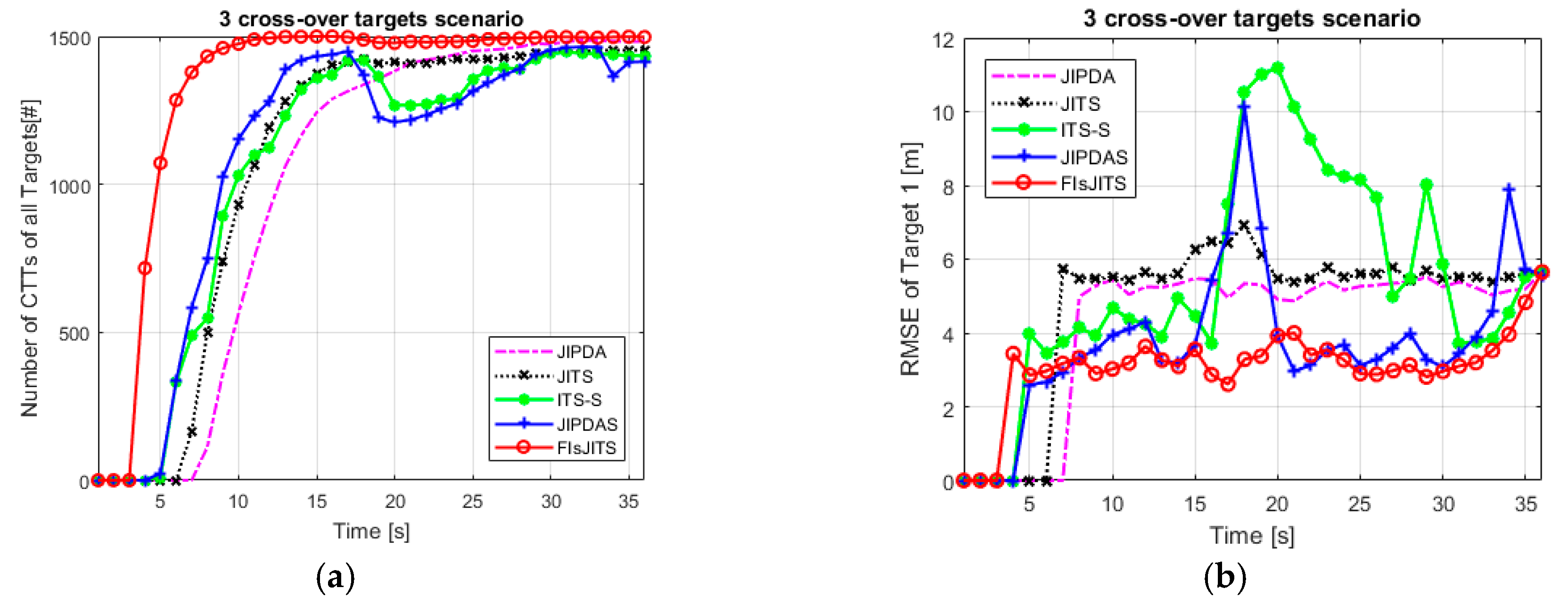
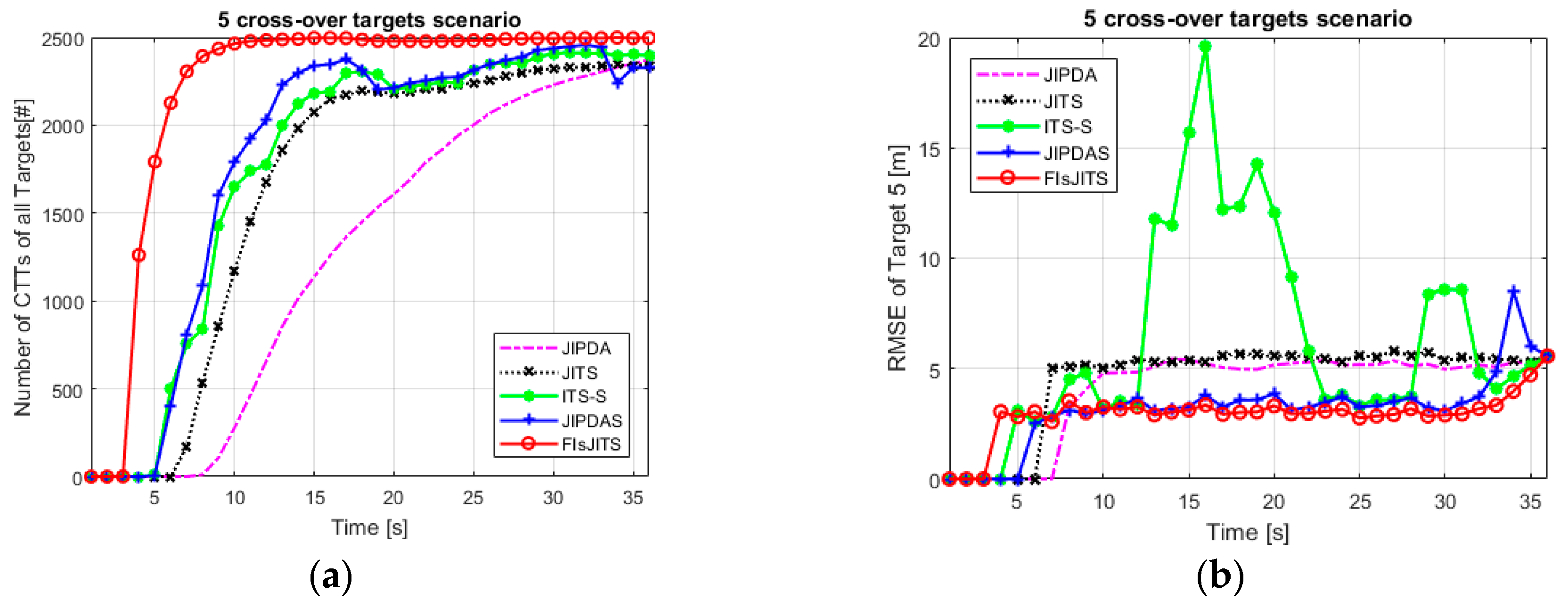
4. Numerical Analysis Using Simulations
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclatures
| k = 1, 2, …, Kth | Scan index in forward-path tracks. |
| b = 1, 2, …, Bth | Scan index in backward-path tracks. |
| N | Index of last scan in the smoothing interval which has length of n. |
| N\k | Scan index where k is removed from interval when fusing forward and backward predictions. |
| k|N | Scan index in which smoothing estimate is obtained conditioning on measurements in N. |
| Yk | Sensor measurements in forward-path tracks. |
| Yb | Sensor measurements backward-path tracks. |
| Yk,i/Yb,i | ith measurement in Yk/Yb respectively. |
| yb,i | ith backward validation measurement selected from Yb in the validation gate created by bJITS track. |
| ith smoothing validation measurement selected from Yk in the validation gate created by FIsJITS track. | |
| ρk,i ≡ ρ(Yk,i) | Clutter measurement density of the measurement Yk,i. |
| Set of two consecutive forward-time scans measurements used for initializing forward tracks. | |
| Set of consecutive scan measurements starting from last scan index N to the Bth scan of an interval and used for initializing backward tracks. | |
| fJITS Estimated target existence probability of the target existence event (where ψ = 1, 2, …, ψth denotes target index) in Kth scan conditioned on Yk−1 | |
| bJITS Estimated target existence probability of the target existence event in Bth scan conditioned on Yb+1. | |
| Denote the mean and covariance of the ψth target state estimate for one of the backward component calculated using Yb in Bth scan. | |
| Denote the mean and covariance of the ψth target state prediction for one of the backward component calculated using Yb+1 in Bth + 1 scan. | |
| Denote the mean and covariance of the ψth target state estimate for one of the forward component calculated using Yk in Kth scan. | |
| Denote the mean and covariance of the ψth target state prediction for one of the forward component calculated using Yk−1 in Kth − 1 scan. |
References
- Khaleghi, B.; Khamis, A.; Karray, F.O.; Razavi, S.N. Multisensor data fusion: A review of the state-of-the-art. Inf. Fusion 2013, 14, 28–44. [Google Scholar] [CrossRef]
- Challa, S.; Evans, R.; Morelande, M.; Mušicki, D. Fundamentals of Object Tracking; Cambridge University Press: New York, NY, USA, 2011. [Google Scholar]
- Lee, E.H.; Zhang, Q.; Song, T.L. Markov Chain Realization of Joint Integrated Probabilistic Data Association. Sensors 2017, 17, 2865. [Google Scholar] [CrossRef] [PubMed]
- Sarkka, S.; Vehtari, A.; Lampinen, J. Rao-blackwellized particle filter for multiple target tracking. Inf. Fusion 2007, 8, 2–15. [Google Scholar] [CrossRef]
- He, S.; Shin, H.S.; Tsourdos, A. Joint Probabilistic Data Association Filter with Unknown Detection Probability and Clutter Rate. Sensors 2018, 18, 269. [Google Scholar]
- Chen, X.; Li, Y.; Li, J.; Li, X. A Novel Probabilistic Data Association for Target Tracking in a Cluttered Environment. Sensors 2016, 16, 2180. [Google Scholar] [CrossRef]
- Jiang, X.; Harishan, K.; Tharmarasa, R.; Kirubarajan, T.; Thayaparan, T. Integrated track initialization and maintenance in heavy clutter using probabilistic data association. Signal Process. 2014, 94, 241–250. [Google Scholar] [CrossRef]
- Aziz, A.M. A joint possibilistic data association technique for tracking multiple targets in a cluttered environment. Inf. Fusion 2014, 280, 239–260. [Google Scholar] [CrossRef]
- Zhang, Y.; Ji, H.; Hu, Q. A box-particle implementation of standard PHD filter for extended target tracking. Inf. Fusion 2017, 34, 28–65. [Google Scholar] [CrossRef]
- Thomaidis, G.; Tsogas, M.; Lytrivis, P.; Karaseitanidis, G.; Amditis, A. Multiple hypothesis tracking for data association in vehicular networks. Inf. Fusion 2013, 14, 374–383. [Google Scholar] [CrossRef]
- López-Araquistain, J.; Jarama, A.J.; Besada, J.A.; Miguel, G.; Casar, J.R. A new approach to map-assisted Bayesian tracking filtering. Inf. Fusion 2018, 45, 79–95. [Google Scholar] [CrossRef]
- Xie, Y.; Huang, Y.; Song, T.L. Iterative joint integrated probabilistic data association filter for multiple-detection multiple-target tracking. Digit. Signal Process. 2018, 72, 32–43. [Google Scholar] [CrossRef]
- Mušicki, D.; Evans, R. JIPDA: Automatic target tracking avoiding track coalescence. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 962–974. [Google Scholar]
- Mušicki, D.; Evans, R. Multi-scan multi-target tracking in clutter with integrated track splitting filter. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1432–1447. [Google Scholar] [CrossRef]
- Song, T.L.; Mušicki, D.; Yong, K. Multi-target tracking with state dependent detection. IET Radar Sonar Navig. 2015, 9, 10–18. [Google Scholar] [CrossRef]
- Song, T.L.; Mušicki, D. Target tracking with target state dependent detection. IEEE Trans. Signal Process. 2011, 59, 1063–1074. [Google Scholar] [CrossRef]
- Mušicki, D.; Evans, R.; Stankovic, S. Integrated probabilistic data association. IEEE Trans. Autom. Control 1994, 39, 1237–1241. [Google Scholar] [CrossRef]
- Mušicki, D.; Evans, R. Integrated probabilistic data association-finite resolution. Automatica 1995, 31, 559–570. [Google Scholar] [CrossRef]
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation: Theory Algorithms and Software; Wiley & Sons, Inc.: New York, NY, USA, 2004. [Google Scholar]
- Mahalanabis, A.; Zhou, B.; Bose, N. Improved multi-target tracking in clutter by PDA smoothing. IEEE Trans. Aerosp. Electron. Syst. 1990, 26, 113–121. [Google Scholar] [CrossRef]
- Vo, B.-N.; Vo, B.-T.; Mahler, P.S. Closed Form Solutions to Forward-Backward Smoothing. IEEE Trans. Signal Process. 2011, 60, 2–17. [Google Scholar] [CrossRef]
- Memon, S.; Lee, W.J.; Song, T.L. Efficient smoothing for multiple maneuvering targets in heavy clutter. In Proceedings of the 5th International Conference on Control, Automation and Information Sciences (ICCAIS), Ansan, South Korea, 27–29 October 2016; pp. 249–254. [Google Scholar]
- Kim, T.H.; Song, T.L. Multi-target multi-scan smoothing in clutter. IET Radar Sonar Navig. 2016, 10, 1270–1276. [Google Scholar] [CrossRef]
- Memon, S.; Song, T.L.; Kim, T.H. Smoothing Data Association for Target Trajectory Estimation in Cluttered Environments. Eurasip J. Adv. Signal Process. 2016, 21, 1–21. [Google Scholar] [CrossRef]
- Memon, S.; Son, H.; Memon, K.H.; Ansari, A. Multi-scan smoothing for tracking manoeuvering target trajectory in heavy cluttered environment. IET Radar Sonar Navig. 2017, 11, 1815–1821. [Google Scholar] [CrossRef]
- Memon, S.; Son, H.; Memon, A.A.; Ahmed, S. Track Split Smoothing for Target Tracking in Clutter. In Proceedings of the 5th International Conference on Mechanical and Aerospace Engineering (ICASE), Islamabad, Pakistan, 14–16 November 2017. [Google Scholar]
- Salmond, D.J. Mixture Reduction Algorithms for Target Tracking in Clutter. SPIE 1990, 1305, 434–445. [Google Scholar]
- Williams, J.L.; Mayback, P.S. Cost-function-based Gaussian mixture reduction for target tracking. In Proceedings of the 6th International Conference Information Fusion, Queensland, Australia, 8–11 July 2003; pp. 1047–1054. [Google Scholar]
- Zhang, H.; Ge, H.; Yang, J.; Yuan, Y. A GM-PHD algorithm for multiple target tracking based on false alarm detection with irregular window. Signal Process. 2016, 120, 537–552. [Google Scholar] [CrossRef]
- Zhang, Q.; Song, T.L. Gaussian mixture presentation of measurements for long-range radar tracking. Digit. Signal Process. 2016, 56, 110–122. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PJE (i = 1, 2, …) | T1 | T2 | T3 | A-Posteriori Probability |
|---|---|---|---|---|
| p(ε1|Yb) | 0 | 0 | 0 | Equation (14) |
| p(ε2|Yb) | M1 | 0 | 0 | Equations (14) and (16) |
| p(ε3|Yb) | M2 | 0 | 0 | Equations (14) and (16) |
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ |
| p(ε21|Yb) | M2 | M3 | M4 | Equation (16) |
| Scenario | # of fJITS Tracks | # of bJITS Tracks | # of Sensor Measurements | # of Measurements in a Tracking Gate |
|---|---|---|---|---|
| Three targets | 216,000 (≈12 per scan) | 378,000 (≈21 per scan) | ≈28 per scan | ≈2 per forward track in each scan |
| Five targets | 288,000 (≈16 per scan) | 486,000 (≈27 per scan) | ≈36 per scan | ≈3 per forward track in each scan |
| Scenario | FIsJITS | ITS-S | JITS | JIPDAS | JIPDA |
|---|---|---|---|---|---|
| Three targets | 3.0 | 5.5 | 3.4 | 6.4 | 2.5 |
| Five targets | 7.6 | 8.3 | 6.6 | 9.5 | 3.5 |
| Target # | Initial Position (m) |
|---|---|
| 1 | [100; 300; 15; 0] |
| 2 | [100; 450; 15; −10] |
| 3 | [150; 100; 15; 10] |
| 4 | [150; 520; 15; 0] |
| 5 | [387.5; 80; 0; 15] |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Memon, S.A.; Kim, M.; Son, H. Tracking and Estimation of Multiple Cross-Over Targets in Clutter. Sensors 2019, 19, 741. https://doi.org/10.3390/s19030741
Memon SA, Kim M, Son H. Tracking and Estimation of Multiple Cross-Over Targets in Clutter. Sensors. 2019; 19(3):741. https://doi.org/10.3390/s19030741
Chicago/Turabian StyleMemon, Sufyan Ali, Myungun Kim, and Hungsun Son. 2019. "Tracking and Estimation of Multiple Cross-Over Targets in Clutter" Sensors 19, no. 3: 741. https://doi.org/10.3390/s19030741
APA StyleMemon, S. A., Kim, M., & Son, H. (2019). Tracking and Estimation of Multiple Cross-Over Targets in Clutter. Sensors, 19(3), 741. https://doi.org/10.3390/s19030741