1. Introduction
As one of the most important underwater information acquisition means, the UASA node plays an important role in underwater acoustic communication, marine noise monitoring, observation of marine animals, antisubmarine, underwater target localization, etc. [
1,
2,
3,
4,
5,
6,
7]. On the one hand, in some applications such as underwater acoustic communication, noise monitoring of marine and observation of marine animals, a single UASA node is utilized to collect and record acoustic signals [
2]. For the single UASA node, bandwidth, sampling rate, sensitivity, signal-to-noise ratio (SNR) and dynamic range are important indicators to evaluate its acquisition performance [
8]. In addition, for some platforms that need to work for a long time underwater, the storage capacity and battery capacity of the UASA node must be large enough [
9]. On the other hand, in some applications such as antisubmarine and underwater target localization, a single UASA node can no longer meet the requirements. Multiple UASA nodes are usually used jointly with a distributed structure in order to achieve high-accuracy target localization [
10,
11]. For example, the target localization approaches based on time difference of arrival (TDOA) are widely used in underwater target localization [
11]. These approaches utilize multiple distributed UASA nodes to measure the time difference among the acoustic signals from the target to different UASA nodes, and then the target position is estimated based on the measured time difference [
12]. In order to estimate the target position accurately, it is necessary to make a high-precision measurement of TDOA, and a high-accuracy synchronization sampling method among multiple UASA nodes is the basis of accurate TDOA measurements [
13]. Therefore, in anti-submarine and underwater target localization applications, the synchronization sampling accuracy among UASA nodes is crucial [
14].
On the one hand, in a single UASA node, some key indexes, such as bandwidth, sampling rate, sensitivity and SNR, have received attention by researchers [
2,
8]. First, the bandwidth and sampling rate of the UASA node are determined by the frequency characteristic of the input acoustic signal, which varies with application scenarios [
7,
8]. In the field of underwater acoustic communication, a low-frequency acoustic signal is widely applied to reduce signal attenuation and increase the communication distance, and its frequency is usually less than 20 kHz [
15]. For example, the frequency range of the S2CR 7–17 acoustic modem produced by the Evologics company is 7 kHz to 17 kHz, and the communication distance is up to 8000 m. In addition, the communication distance of the TrackLink-10000 acoustic modem produced by the LinkQuest company is up to 10,000 m, and the frequency band ranges from 7.5 kHz to 12.5 kHz. In the field of marine animal observation, many species emit low-frequency sounds. For example, the frequency of sperm whales’ click signal is mainly from 3 kHz to 14 kHz, the frequency of monodon whales’ click signal is mainly from 1.5 kHz to 20 kHz, and the frequency of long-finned pilot whales’ whistle signal is mainly from 4.1 kHz to 8 kHz [
16]. Therefore, the UASA node with an input frequency up to 20 kHz is qualified for these low-frequency applications. Second, the sensitivity of the UASA node mainly depends on the sensitivity of the hydrophone. With the improvement of hydrophone manufacturing technology, high-sensitivity hydrophones produced by some companies such as Teledyne RESON, Brüel & Kjær and High Tech Inc. have been widely used [
17]. Third, for most underwater acquisition systems, SNR is one of the core performance parameters [
18]. In order to obtain high SNR, a low-noise signal conditioning circuit is necessary. In addition, the self-contained acquisition system integrates multiple functional units such as sensors, signal conditioning circuits, data processing and a storage module, so it has obvious advantages in reducing the interference of analog signals and noise suppression [
19,
20]. In some existing self-contained UASA systems, the SNR of the BII-8040 underwater acoustic receiver system produced by the Benthowave company is 79 dB, and the SNR of the ORCA passive acoustic recorder produced by the RS-AQUA company is 95.5 dB. However, the storage capacity and battery capacity of traditional self-contained UASA node are limited by the volume of node [
9], and it is not suitable for long-term underwater acquisition.
On the other hand, among multiple distributed UASA nodes, several solutions [
21,
22,
23,
24,
25,
26,
27,
28] have been proposed to achieve high accuracy synchronization sampling [
21]. With the development of network technology, David L. Mills proposed the network time protocol (NTP) [
22], which transmits standard time from a synchronous server to a receiving end by Ethernet. The synchronization accuracy of NTP was less than 0.1 ms in the local area network (LAN). In order to achieve time synchronization with higher accuracy, the IEEE1588 precision clock synchronization protocol (PTP) completes the offset measurement and delays measurement by multiple time checks between the master and slave clocks, realizing time synchronization at the sub-microsecond level [
23,
24]. National Semiconductor, Imsys Technology, Micrel and other companies have produced dedicated IEEE1588 synchronous chips, which have been widely used in automation control and other industrial fields. In wireless sensor networks, a timing synchronization protocol for sensor networks (TPSN), time-diffusion synchronization protocol (TDP) and other approaches have been proposed [
25], which contribute to underwater synchronization sampling [
26]. In addition, pulse per second (PPS) provided by Global Positioning System (GPS), Beidou and other satellite systems has ns-level precision and a wide receiving range [
27,
28]. Synchronization approaches based on PPS play an important role in long-distance synchronization technology. However, the existing synchronization approaches are inapplicable for multiple distributed UASA nodes. In some synchronization approaches such as TPSN and TDP, the synchronization algorithms have a high computational load. Besides, it is very difficult to receive PPS underwater because the propagation attenuation of electromagnetic wave underwater is very serious.
In this paper, aiming at the application demand of underwater acquisition and synchronization sampling between distributed UASA nodes, a high-SNR UASA node that combines the self-contained acquisition system and floating platform is designed to improve the acquisition performance of a single UASA node, and a high-accuracy synchronization sampling method among multiple distributed UASA nodes based on MSDPLL is proposed to improve the synchronization sampling accuracy. A single UASA node is developed. Furthermore, its acquisition performance and synchronization accuracy of the synchronization sampling method among multiple distributed UASA nodes are presented based on the experimental measurements.
2. Structure of the UASA Node
As shown in
Figure 1, the UASA node can be divided into two parts: surface equipment and underwater equipment. The surface equipment floats on the water, which consists of a satellite receiver, main phase lock loop (MPLL), hard disk drive (HDD) and solar cell. The satellite receiver is used to receive PPS, and the PPS serves as the reference signal of MPPL. The MPPL is used to generate a sampling signal which is locked to the rising edge of the PPS. HDD stores data uploaded from underwater equipment. Solar cells are used to provide power to the whole UASA node continuously.
The sea surface equipment and underwater equipment are connected through transmission cables. The transmission cable includes power, data and clock lines. The power line is used for power supply of underwater equipment. The data line is used for data uploading, and the clock line is used for transmission of sampling signal. In this paper, distant transmission of the data and clock is realized by the RS-485 interface. With the help of a high-performance RS-485 interface chip, the transmission distance can reach 100 m under a 50 Mbps transmission speed.
In the underwater equipment, the acoustic signal is converted into an electrical signal by the hydrophone and is then amplified, filtered and digitized by the signal processing circuit and analog-to-digital converter (ADC). Considering the computing performance and power consumption, a CortexTM-M4 microprocessor STM32F405 is utilized in the UASA node to ensure that data acquisition and storage are controlled by the preset program; the program can be rewritten through the SWD interface before installation, and then the UASA node runs independently and automatically. According to the practical application requirement of underwater acoustic signal acquisition, the converted data can be saved in local storage or uploaded to the surface platform. In addition, the slave phase-locked loop (SPLL) is used to lock the DRDY signal to the sampling signal, where DRDY is an indication signal that the ADC data conversion is completed once. The power module is connected to solar cells through power lines. Considering the voltage that solar cells provide is 12 V, the power management chip and low dropout regulator are essential in the power module to convert 12 V-voltage into steady required voltage such as 5 V, −5 V and 3.3 V, supplying power to the components in underwater equipment.
As shown in
Figure 2 and
Figure 3, the main mechanical structure of surface equipment is a buoy, and an anchor is utilized to maintain position over the water surface. The mechanical structure of underwater equipment is a sealed aluminum container. According to the sealing technique commonly utilized in engineering, sealing rings are used to isolate the internal environment from water. As for the transmission cable, one end is connected to the underwater equipment and the other end is connected to a waterproof plug. There is a waterproof socket at the bottom of the buoy, so it is easy to connect and separate the UASA node. The transmission cable is externally wrapped with a load-bearing layer, which allows the underwater equipment to be suspended below the buoy.
In addition to the acquisition of underwater acoustic, the UASA node can be extended to obtain more underwater information. For example, an underwater temperature sensor is utilized to measure water temperature, an underwater pressure sensor is utilized to measure the depth, and an underwater conductivity sensor is utilized to measure the salinity of seawater. However, underwater acoustic signal acquisition is the focus of this paper.
3. Design of a Single UASA Node
3.1. Hydrophone
In the UASA node, a mature piezoelectric hydrophone is utilized. According to the performance requirements of the input signal frequency range and sensitivity, the BII-7011 hydrophone is chosen. As shown in
Figure 4, the sensitivity of the hydrophone is −208 dB V/uPa from 1 Hz to 20 kHz.
According to Mason’s equivalent circuit, the piezoelectric hydrophone is equivalent to a voltage source and a capacitor [
29], and the equivalent circuit is shown in
Figure 5. In the equivalent circuit, C
e is the nominal capacitance of hydrophone, Rd is the leakage resistCance of hydrophone, whose value is generally at the level of 10
8 Ω, and C
c is the equivalent capacitance of the cable.
3.2. Low-Noise UASA Node
The SNR or dynamic range is a key indicator of a single UASA node. In order to improve the acquisition performance, the noise must be suppressed adequately. In the UASA node, the main noise sources are self-noise of the hydrophone, circuit noise of the acquisition system and environmental noise [
30]. The self-noise of hydrophone is determined by the production level of hydrophone, and the environmental noise depends on the current work environment. In this paper, the circuit noise of acquisition system is mainly analyzed, and a high-performance acoustic signal acquisition circuit with low noise is designed.
The signal-conditioning circuit consists of a preamplifier, secondary amplifier, and low-pass filter. The preamplifier is used to amplify the output signal of the hydrophone. The secondary amplifier is used to adjust the gain of circuit. In the secondary amplifier circuit, an integrated analog switch chip MAX14778 is utilized. There are two control pins, and four channels can be selected by the pin level (00, 01, 10 or 11). Therefore, the gain can be adjusted by the microprocessor. Besides, a low-pass filter is utilized to remove high-frequency noise.
As shown in
Figure 6, the circuit can be regarded as a cascade circuit. The output voltage noise of three cascaded circuits is set as E1, E2 and E3, while the gains are G1, G2 and G3. Under this condition, the total output voltage noise of signal-conditioning circuit can be calculated [
30]:
Equation (1) shows that the noise of preamplifier plays an important role in the total output noise of the signal-conditioning circuit. Therefore, the low noise design of the preamplifier circuit is key [
30]. According to the equivalent circuit in
Figure 7, the voltage signal generated by the piezoelectric hydrophone (U
in) remains stable only if the load is infinite [
29]; otherwise, the circuit will discharge through C
e and R
d. In other words, the input impedance of preamplifier circuit has to be large enough. In order to achieve impedance matching between the preamplifier and hydrophone, a pair of junction field-effect transistors (JFETs) is added to the pre-stage of the operational amplifier, forming a bootstrap to increase the input impedance of the preamplifier circuit. The circuit structure is shown in
Figure 6, and the output of the circuit is U
out.
In the preamplifier circuit, the circuit noise mainly includes operational amplifier noise and thermal noise of resistance [
30,
31]. As shown in
Figure 8, the operational amplifier noise can be equivalent to a noise voltage source and a noise current source according to the circuit noise model. However, it should be noted that the input impendence of preamplifier circuit is very high, and a large noise voltage is generated when the noise current of operational amplifier flows through the input resistance of preamplifier circuit. Therefore, the influence of current noise should be considered emphatically in the preamplifier circuit design, while the voltage noise should be reduced as much as possible. Based on the analysis above, a low noise operational amplifier LTC6240 is used in the preamplifier circuit. Its current noise density is as low as
, and voltage noise density is
. Besides, precision resistors with low noise are used to reduce thermal noise. As for the secondary amplifier and low pass filter, lower-cost operational amplifiers such as OPA1662 can be utilized.
Apart from these inside noise sources, the influence of environmental noise cannot be ignored. An analog signal is easy to be interfered with during transmission, so the structure of the signal conditioning circuit should be as compact as possible to reduce the transmission distance, and a shielding shell is utilized to isolate the external electromagnetic signals.
3.3. Large-Capacity Data Storage
In the UASA node powered by solar cells, data storage capacity becomes the major factor limiting the continuous working time length of the UASA node. In the UASA node, the 24 bit, Delta-Sigma ADC chip ADS1271 is utilized. Considering the sampling rate and the data redundancy caused by data tags, the data generation rate is 192 kB/s, and the data volume of each UASA node for one month is approximately 500 GB.
As shown in
Table 1, HDD has advantages in storage capacity and transmission rate, while a secure digital (SD) card has less size and power consumption. In order to meet the requirement of storage, a data storage scheme that can be switched between local storage and upload mode is designed in this paper. In the local storage mode, a total of 4 SD cards is used to expand the storage capacity to 2 TB, and data are stored on SD cards, where each SD card has 512 GB storage capacity. If the UASA node needs to work for longer hours, the upload mode is switched and data are transported into HDD by the RS-485 interface. In this paper, the local storage mode is mainly introduced.
In a compromised way between performance and power consumption, the microprocessor STM32F405 is selected as the control unit. However, limited by computing performance and processor architecture, the microprocessor does not support multitasking and parallel computation. In order to read output data from ADC and complete real-time storage, a Ping-Pong cache is designed to take advantage of the interrupt function in the microprocessor.
The FATFS file system is used in local storage to facilitate subsequent processing [
32]. As shown in
Figure 9, during the initialization process, a threshold is set to specify the amount of data stored in each file. For example, in order to store data in one file every minute, the threshold should be set as:
After initialization, the remaining storage capacity of SD card is read first. If the remaining capacity is insufficient, the next SD card is switched. During the acquisition process, the microprocessor stores data in the cache, and increases the value of the counter. When the value of the counter reaches the threshold, data in the cache are archived on the SD card. After one file is saved, the microprocessor resets the counter and starts storing the next file until the acquisition ends.
One thing to note is that the sampling rate of ADC can be adjusted by a control pin, which is connected to the microprocessor. In order to save storage and power consumption, the sampling rate can be adjusted according to the frequency of the target signal.
3.4. Synchronization Sampling Method
In many applications, multiple UASA nodes are combined together to implement specific functions, and the number of the UASA node is usually different. For example, in the 2-dimensional positioning system, at least three nodes are required to calculate the location of the target. There is no cable connection between distributed UASA nodes. As a result, when deploying a multi-node system, the only thing to do is place each UASA node in its position, and the anchor ensures that the UASA node does not move over water.
In order to realize synchronization sampling, the MSDPLL is installed in each UASA node. As shown in
Figure 10, the UASA nodes distributed in different positions receive satellite signals and obtain PPS as the reference signal of the MPPL through satellite receivers [
27,
28].
Before discussing the synchronization sampling approach, the sampling principle of the UASA node is analyzed. A Delta-Sigma ADC is utilized in the UASA node, which utilizes a high-frequency clock which is much higher than the sampling frequency to achieve oversampling [
33] for high sampling performance. The sampling timing of ADC is shown in
Figure 11. After a data conversion period is complete, ADC outputs a data ready (DRDY) pulse. In the UASA node, the sampling frequency is 48kHz, the oversampling rate is 512, and thus the clock frequency of ADC is set to 24.576 MHz.
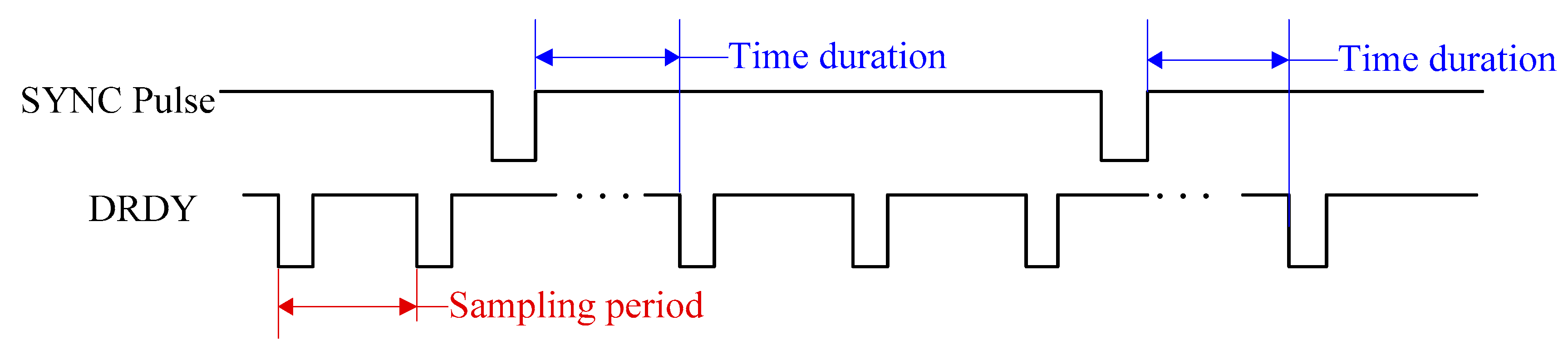
In order to synchronize multiple Delta-Sigma ADCs in the distributed system, all average filters must be reset simultaneously because the average filter controls the start of the conversion. As a result, a synchronization (SYNC) pulse is used. When the SYNC pulse is input through the SYNC pin of ADC, the average filter is reset, and the DRDY signal is generated after a time duration. The duration is determined by the ADC chip. For example, the time duration of ADS1271 is 128 sampling periods. In addition, every time the SYNC pulse is input, the conversion is interrupted and resumed after the same time duration. The timing of synchronization is shown in
Figure 12.
In the traditional synchronization method for a distributed system, a common reference signal such as pulse per second (PPS) is used as the SYNC pulse for all ADCs (please see the following references [
6,
7]). At the arrival time of the SYNC pulse, all ADCs are synchronized, and they are synchronized again at the arrival time of the next SYNC pulse. However, there are many sampling periods between two SYNC pulses and the conversion in each ADC is driven by their own local input clock. The input clock of each ADC is provided by a crystal oscillator, and the frequency of crystal oscillator will fluctuate due to the influence of environmental factors. As shown in
Figure 13, the frequency fluctuation of the input clock will bring in accumulative errors in different ADCs.
For Delta-Sigma ADC, DRDY is a sign indicating the sampling period is complete. In other words, if the DRDY signals of different ADCs are synchronized, the same purpose of synchronization sampling is achieved [
34,
35,
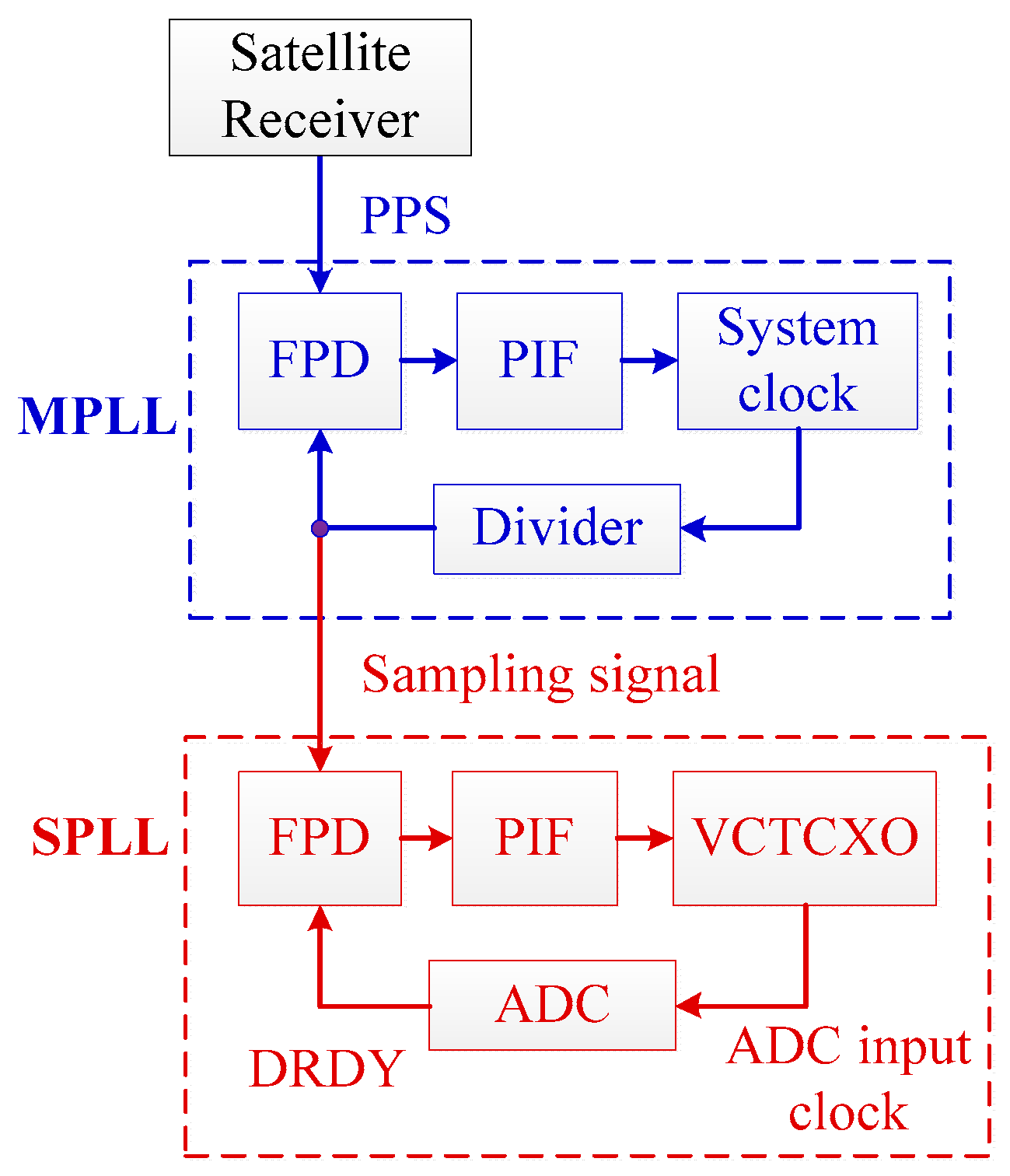
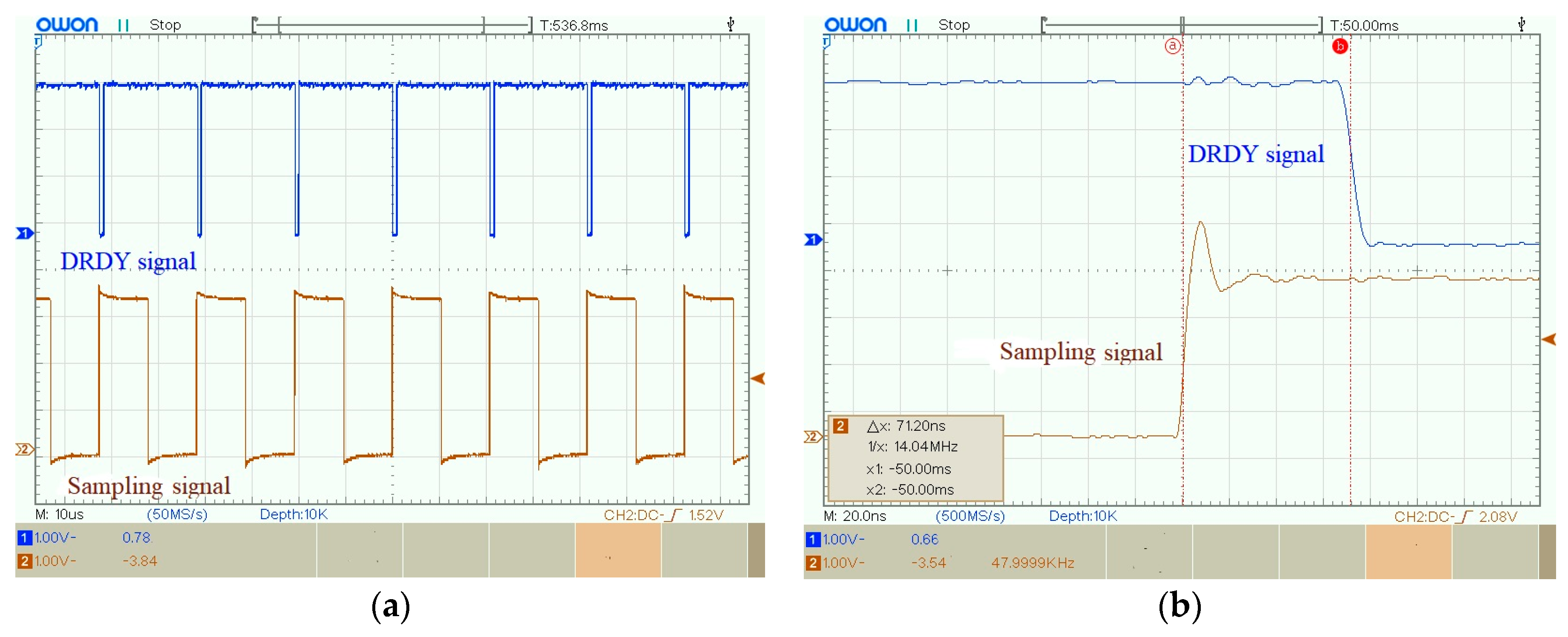
36]. In addition, because the Delta-Sigma ADC is based on the principle of over-sample, the input clock frequency of Delta-Sigma ADC has multiple relationships with sampling frequency, and the ADC can be considered as a divider between input clock frequency and sampling frequency (DRDY). According to these characteristics, an MSDPLL synchronization sampling method is proposed to eliminate the influence of cumulative error. As shown in
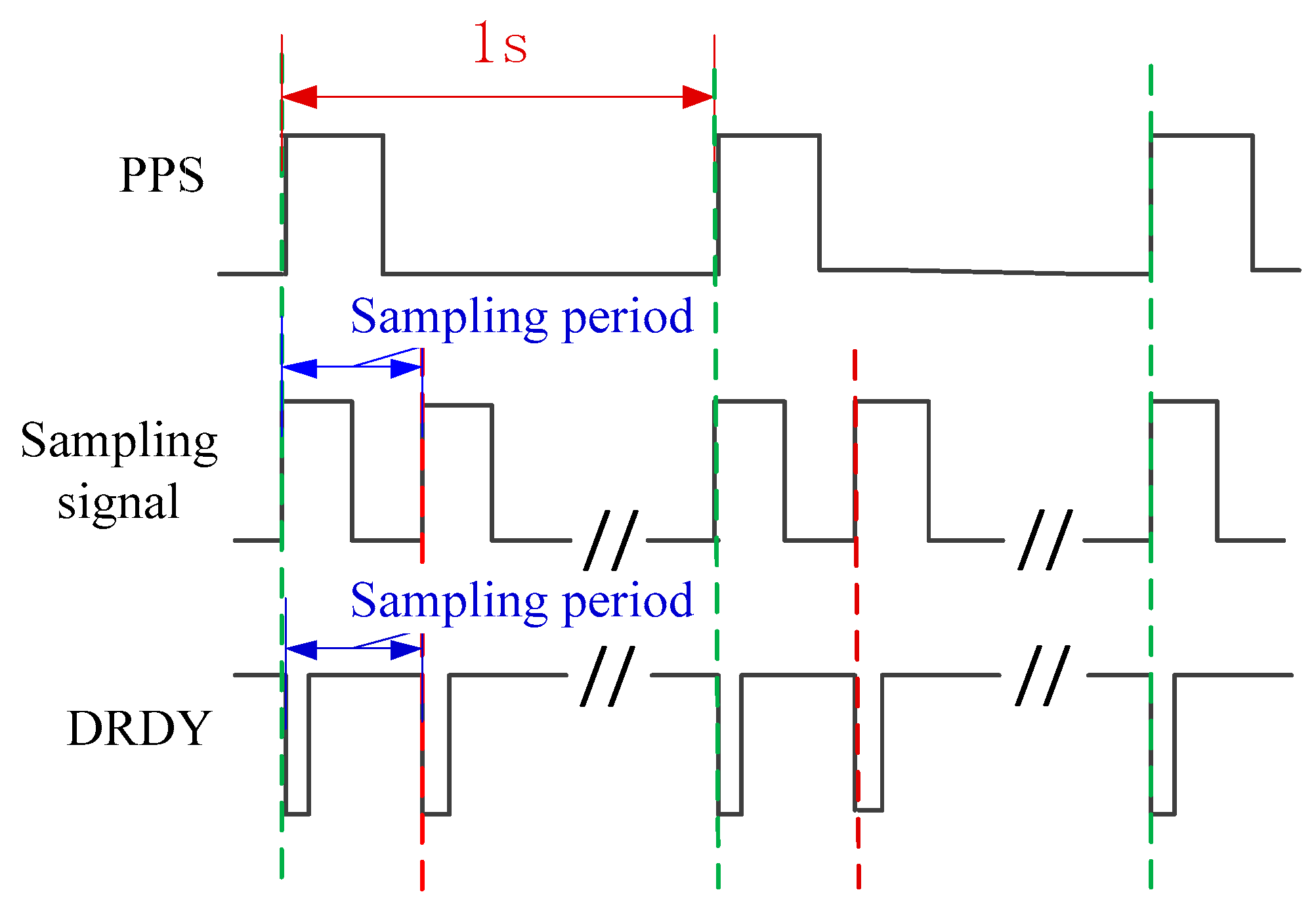
Figure 14, the satellite receiver is used to output PPS, and the sampling signal is generated by MPLL. Then, the sampling signal is transmitted to SPLL through the clock line. In the SPLL, the DRDY signal is synchronized with the sampling signal. When the MSDPLL becomes stable, the DRDY signal will be synchronized with PPS. The synchronization sampling timing is shown in
Figure 15.
In the MPLL, the AD9548 chip integrated with a digital-phase-locked loop (DPLL) is utilized to lock the sampling signal and the PPS. In the SPLL, an analog phase-locked loop (namely, SPLL) is used to lock the DRDY signal to the sampling signal. In order to obtain better performance, the analog phase-locked loop is improved based on the conventional analog phase-locked loop. Further, the traditional phase detector (PD) is replaced by a frequency-phase discriminator (FPD) with fast locking speed and wide phase-locking range. In order to improve the stability of SPLL, a second-order active proportional-integral filter (PIF) is designed according to the Wiener filtering theory. Besides, traditional voltage-controlled frequency source is replaced by a voltage-controlled crystal oscillator (VCTCXO) with high frequency stability and low phase noise, which improves the synchronization accuracy of the phase-locked-loop.

 ,
, 




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}