Pressure Signal Enhancement of Slowly Increasing Leaks Using Digital Compensator Based on Acoustic Sensor



Abstract
:1. Introduction
2. Methodology
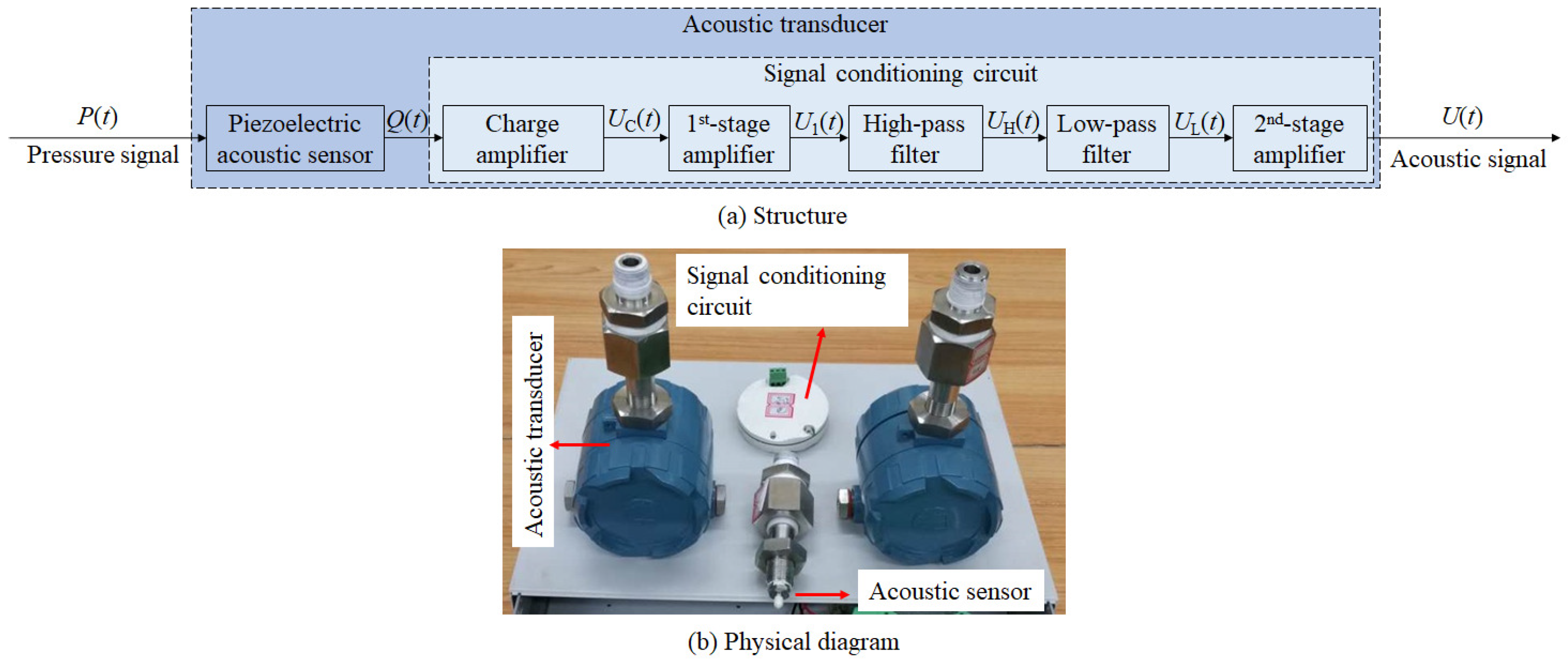
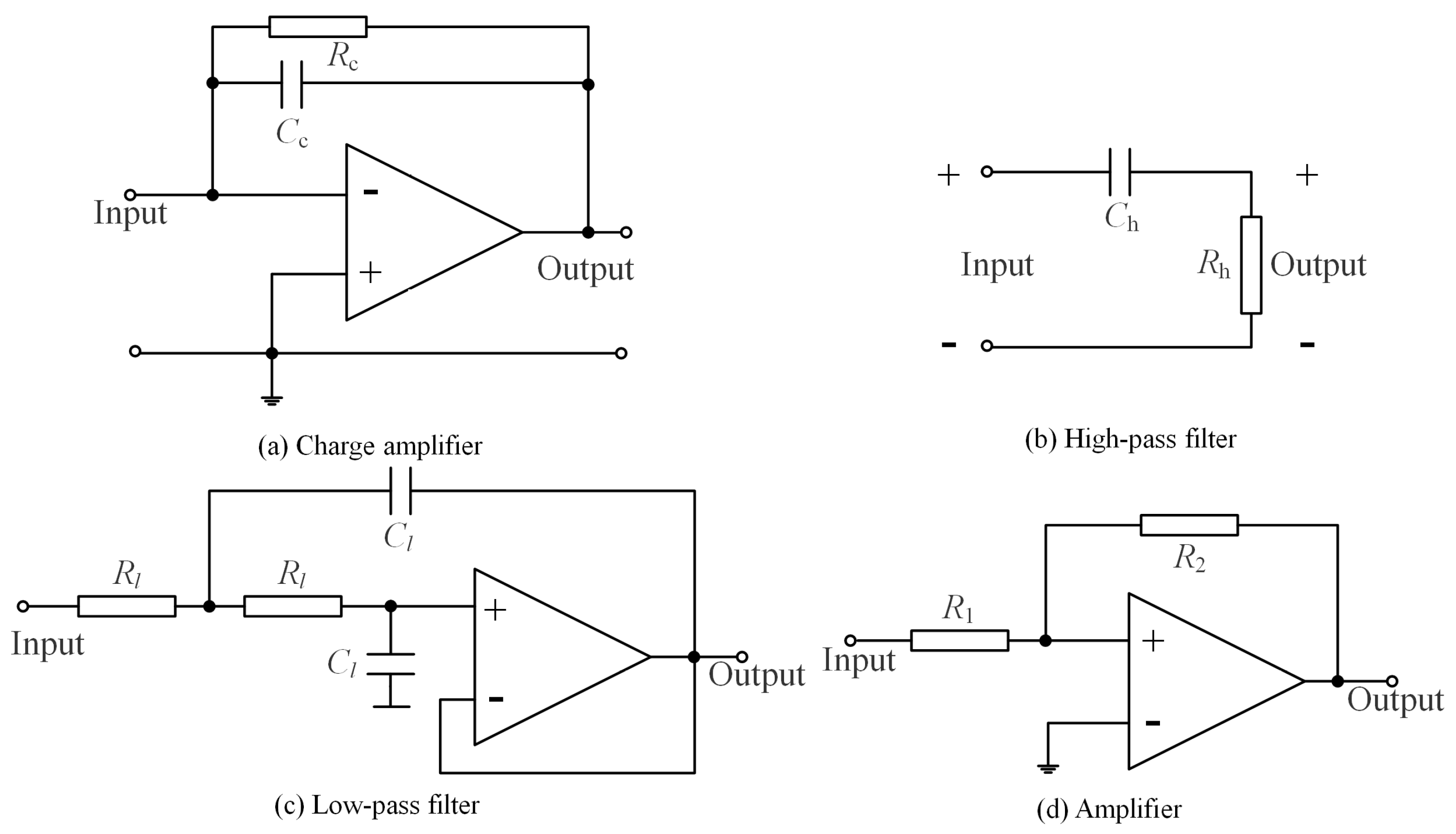
2.1. Development of the Digital Compensator
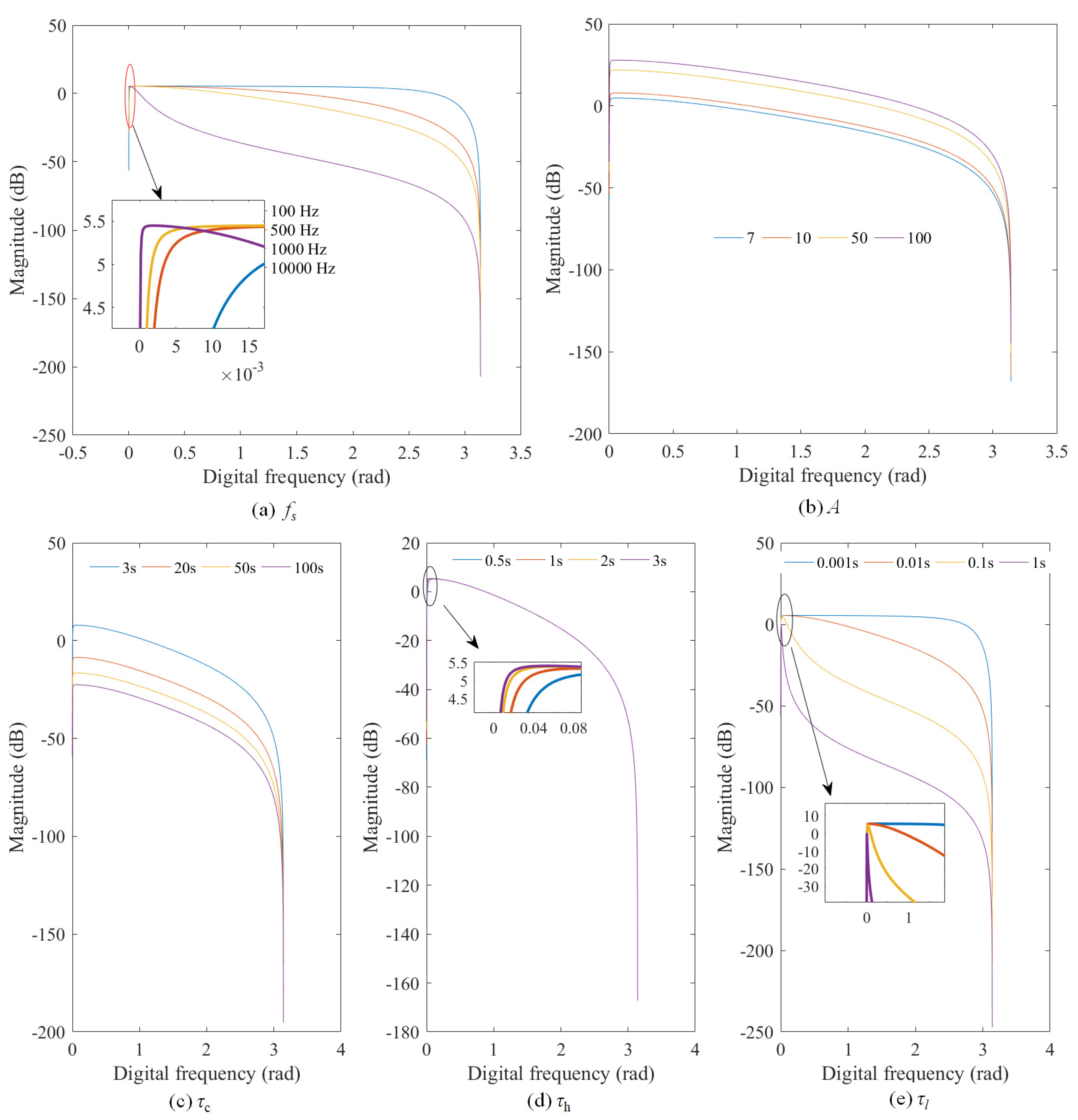
2.2. Stability Analysis of the Digital Compensator
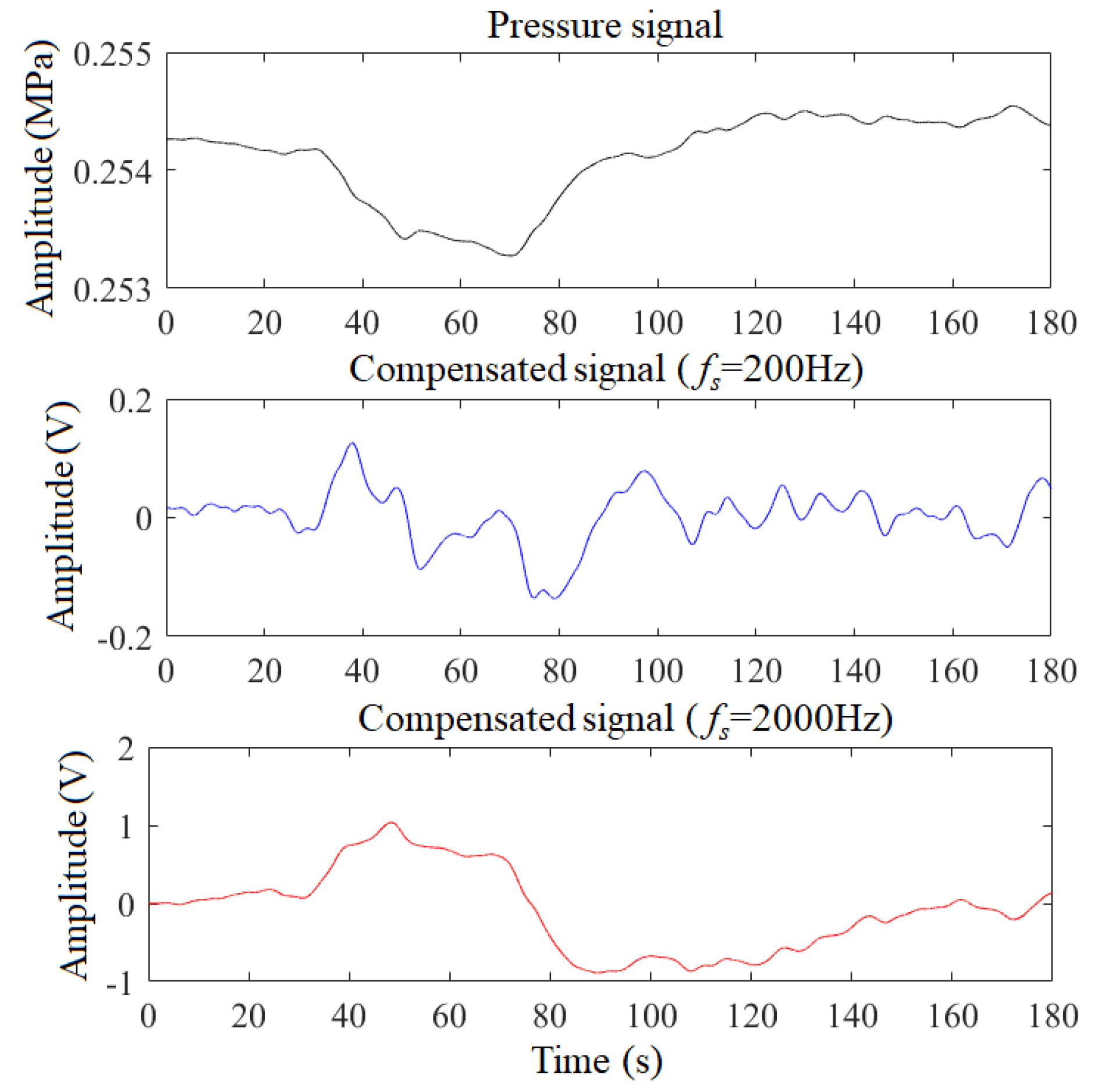
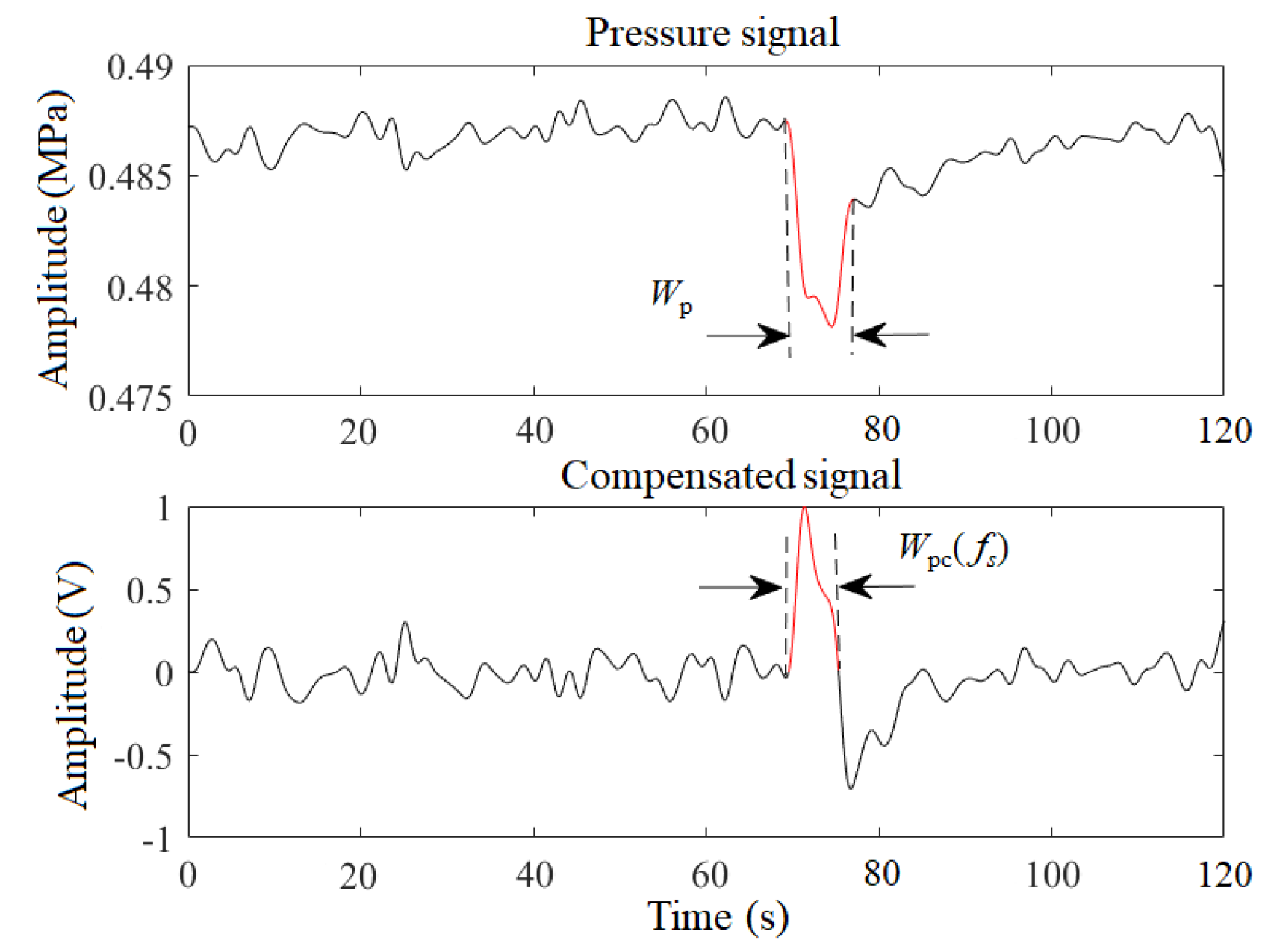
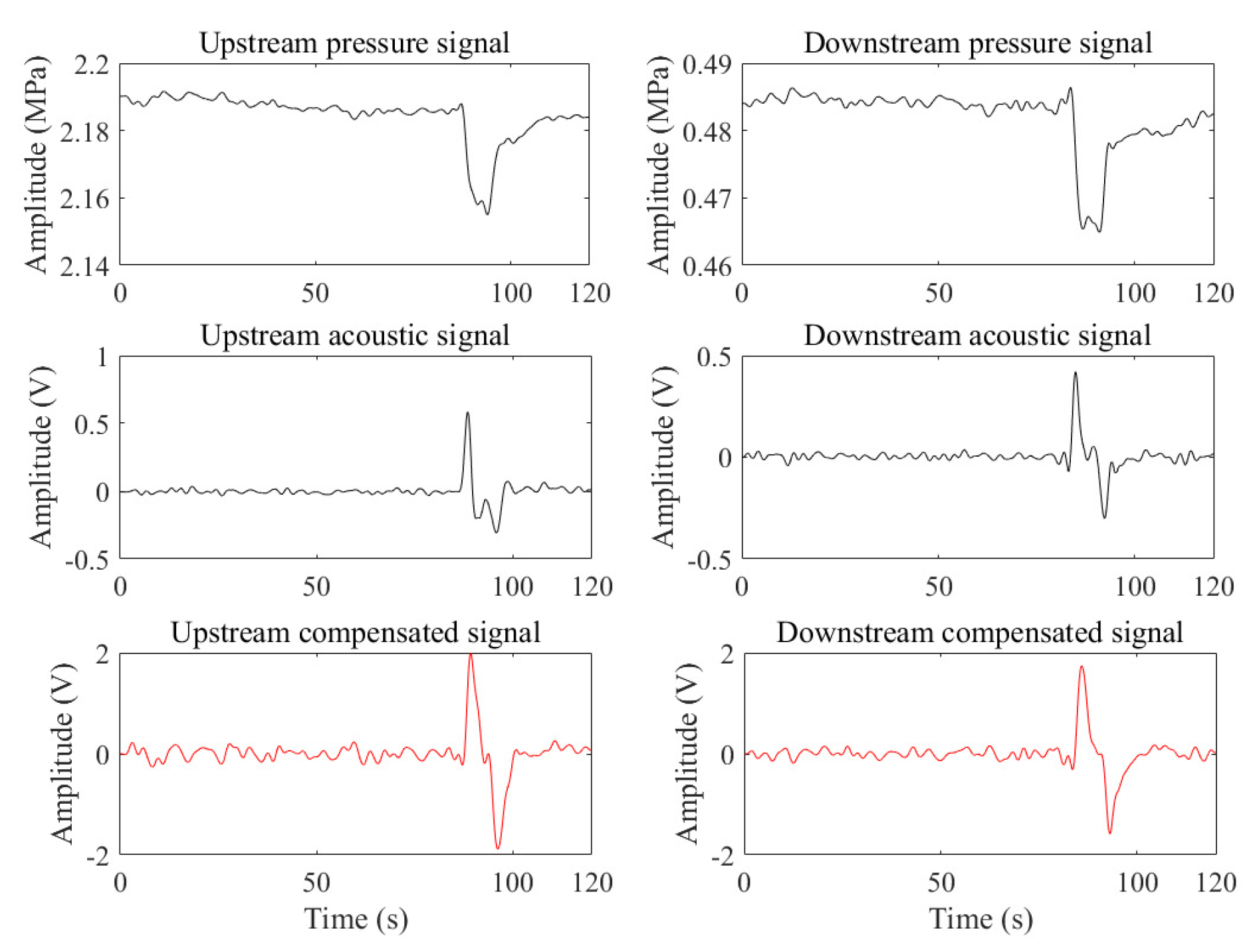
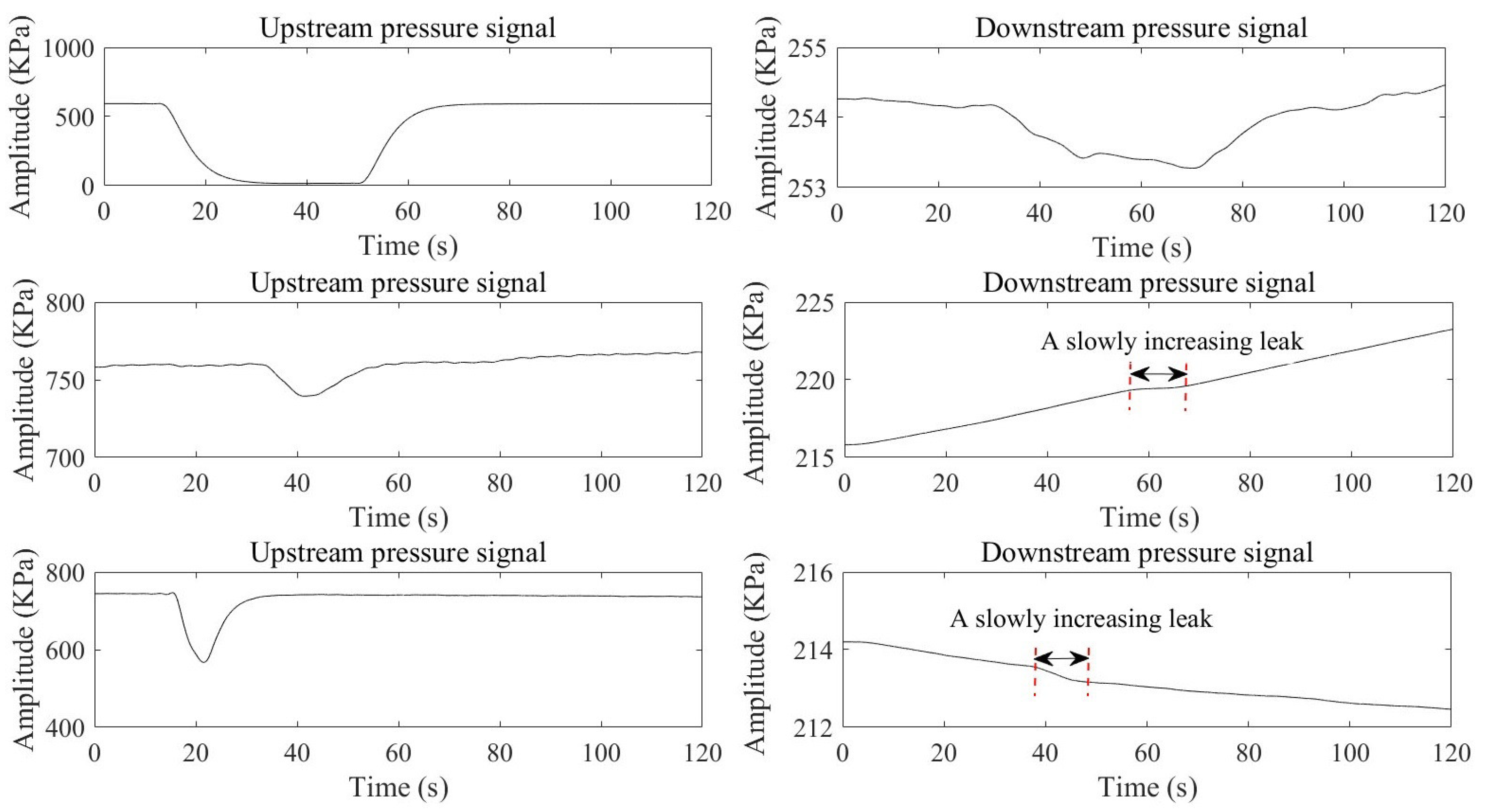
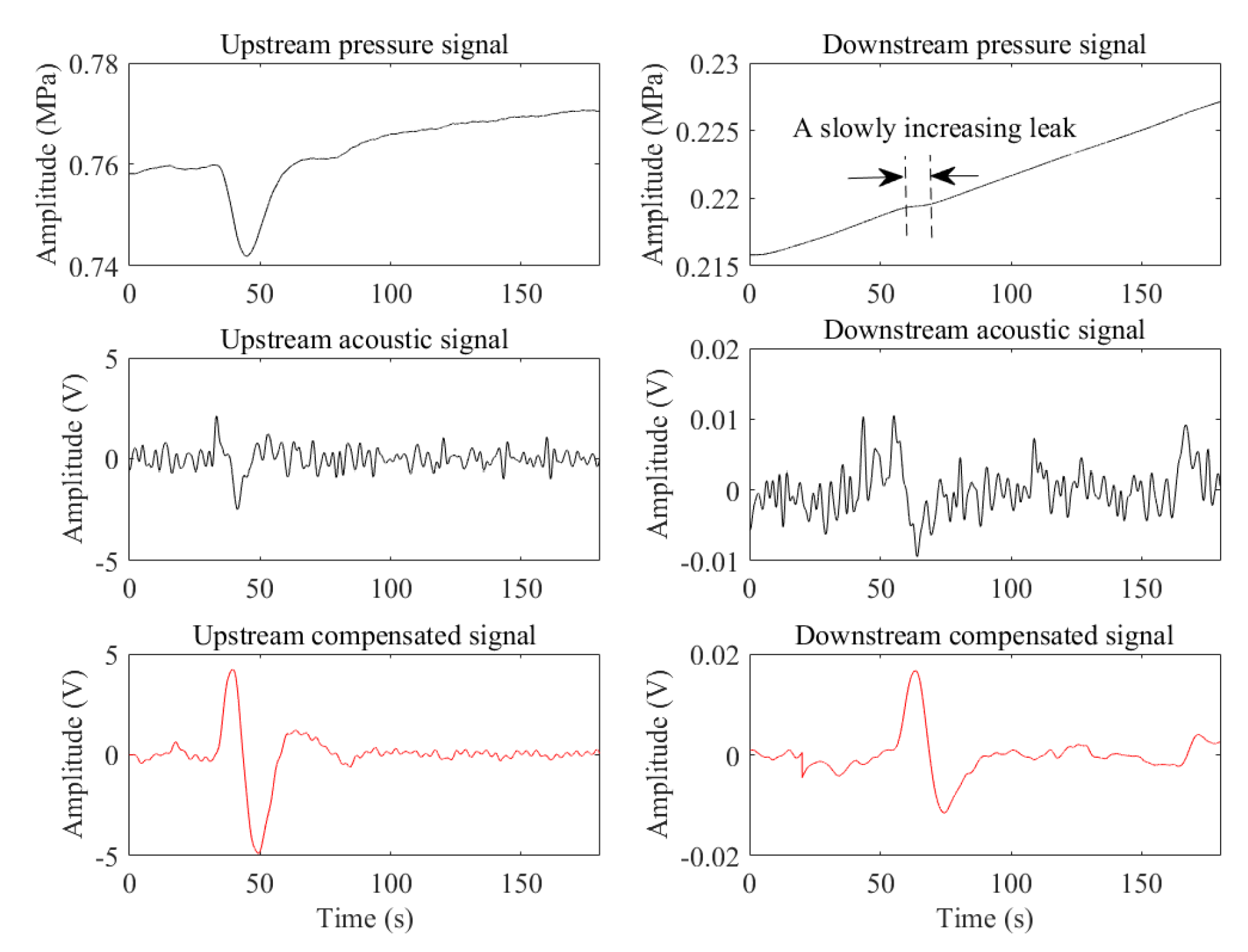
2.3. Pressure Signal Enhancement Principle of Slowly Increasing Leaks
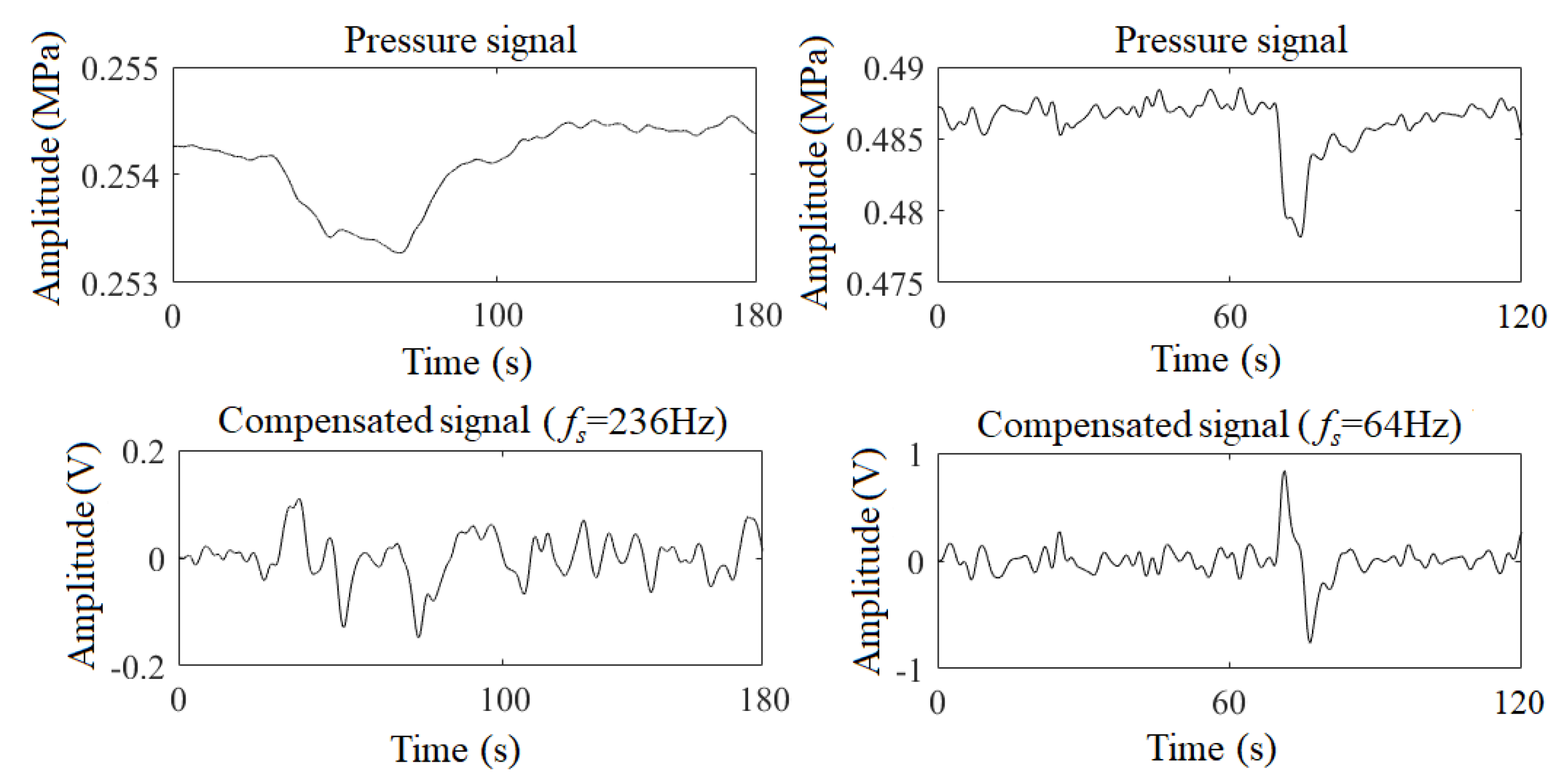
2.4. Adaptive Adjustment of the Discretization Frequency
2.5. Leak Detection and Location
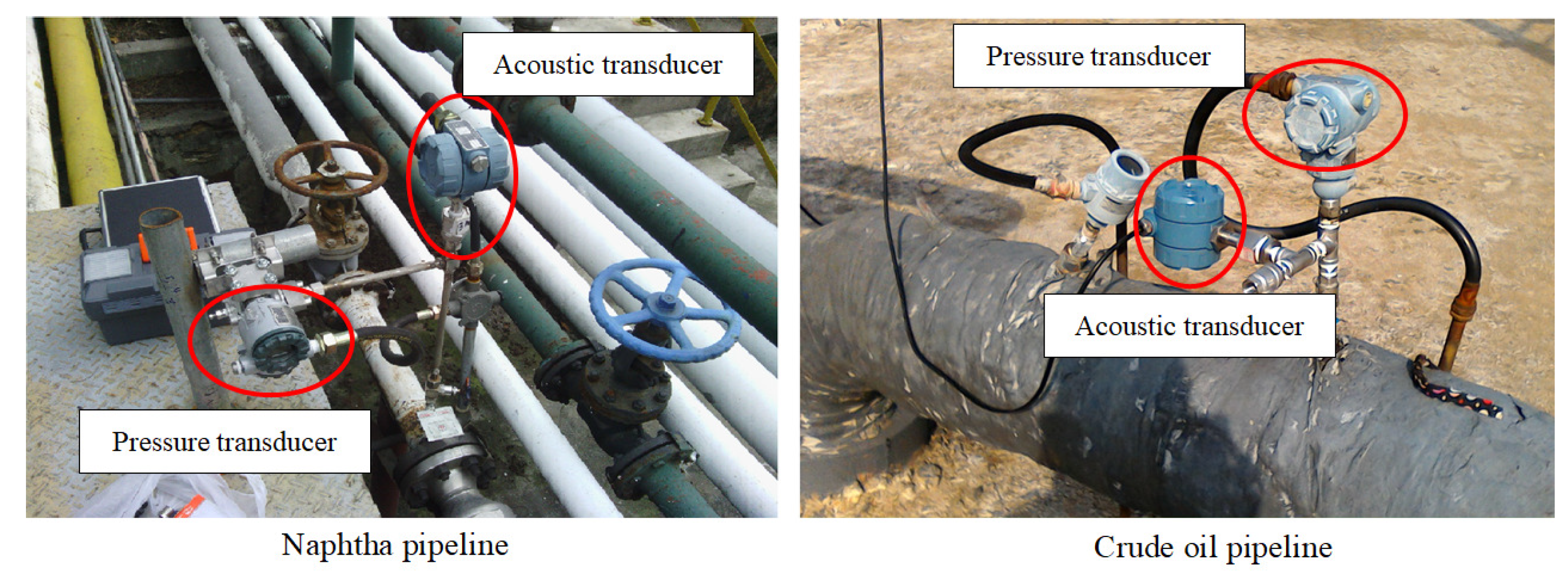
3. Field Experiments
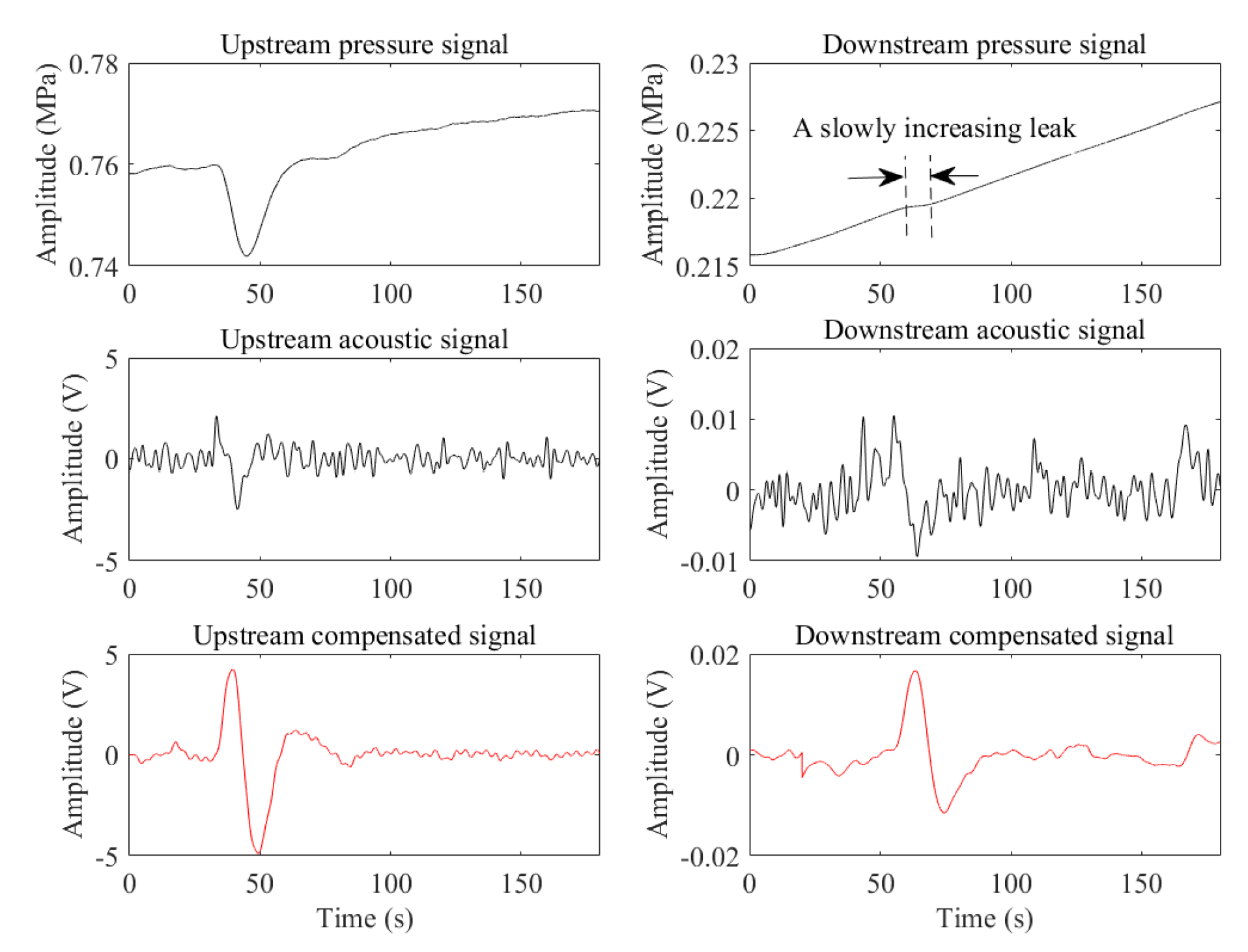
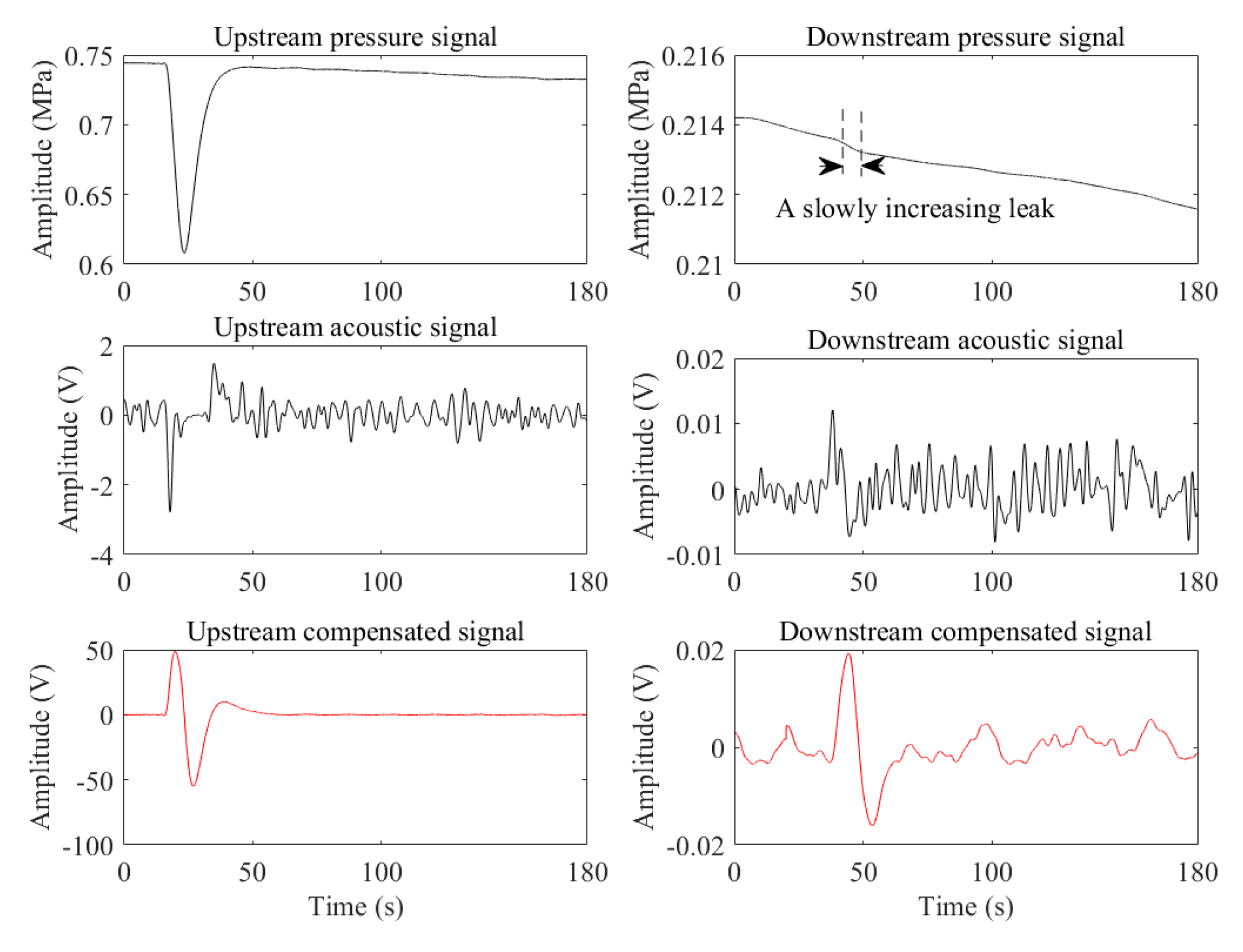
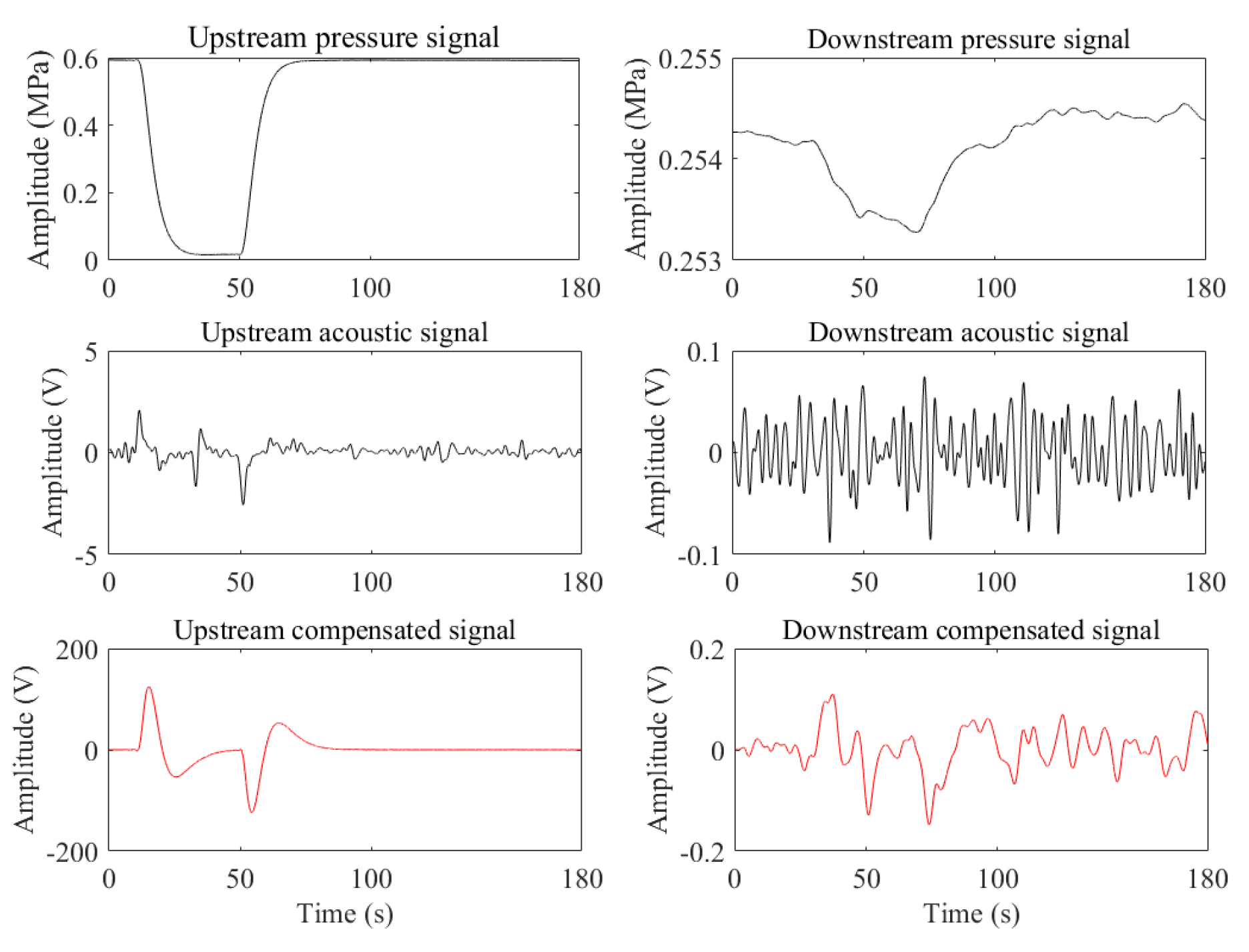
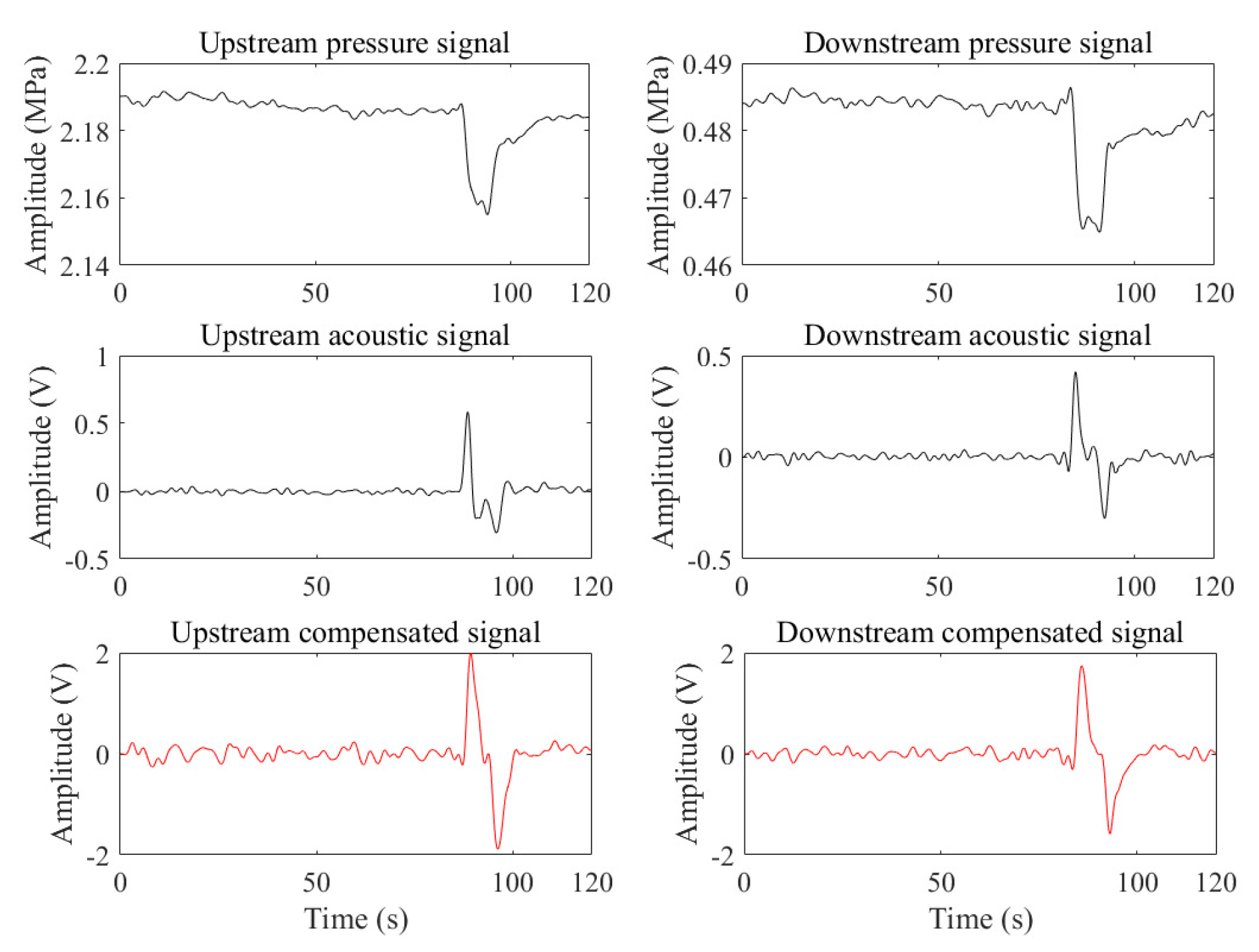
3.1. Case Study
3.2. Comparison of Leak Detection and Location
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
References
- Montiel, H.; Vilchez, J.A.; Casal, J.; Arnaldos, J. Mathematical modelling of accidental gas releases. J. Hazard. Mater. 1998, 59, 211–233. [Google Scholar] [CrossRef]
- Li, S.; Cheng, N.; Wang, P.; Yan, D.; Wang, P.; Li, Y.; Zhao, X.; Wang, P. Extraction of single non-dispersive mode in leakage acoustic vibrations for improving leak detection in gas pipelines. J. Loss Prev. Process Ind. 2016, 41, 77–86. [Google Scholar] [CrossRef]
- Meseguer, J.; Mirats-Tur, J.M.; Cembrano, G.; Puig, V.; Quevedo, J.; Pérez, R.; Sanz, G.; Ibarra, D. A decision support system for on-line leakage localization. Environ. Model. Softw. 2014, 60, 331–345. [Google Scholar] [CrossRef] [Green Version]
- Liang, W.; Zhang, L. A wave change analysis (WCA) method for pipeline leak detection using Gaussian mixture model. J. Loss Prev. Process Ind. 2012, 25, 60–69. [Google Scholar] [CrossRef]
- Xu, J.; Chai, K.T.C.; Wu, G.; Han, B.; Wai, E.L.C.; Li, W.; Yeo, J.; Nijhof, E.; Gu, Y. Low-Cost, Tiny-Sized MEMS Hydrophone Sensor for Water Pipeline Leak Detection Jinghui. IEEE Trans. Ind. Electron. 2019, 66, 6374–6382. [Google Scholar] [CrossRef]
- Zhang, S.; Liu, B.; He, J. Pipeline deformation monitoring using distributed fiber optical sensor. Measurement 2019, 133, 208–213. [Google Scholar] [CrossRef]
- Wong, L.; Deo, R.; Rathnayaka, S.; Shannon, B.; Zhang, C.; Chiu, W.K.; Kodikara, J.; Widyastuti, H. Leak detection in water pipes using submersible optical optic-based pressure sensor. Sensors 2018, 18, 4192. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Li, Y.; Fu, J.T.; Liu, G.X. Experimental study on acoustic propagation-characteristics-based leak location method for natural gas pipelines. Process Saf. Environ. Prot. 2015, 96, 43–60. [Google Scholar]
- Gao, Y.; Brennan, M.J.; Liu, Y.; Almeida, F.C.; Joseph, P.F. Improving the shape of the cross-correlation function for leak detection in a plastic water distribution pipe using acoustic signals. Appl. Acoust. 2017, 127, 24–33. [Google Scholar] [CrossRef] [Green Version]
- Lin, W.; Wang, X.; Wang, F.; Wu, H. Feature extraction and early warning of agglomeration in fluidized bed reactors based on an acoustic approach. Powder Technol. 2015, 279, 185–195. [Google Scholar]
- Li, S.; Song, Y.; Zhou, G. Leak detection of water distribution pipeline subject to failure of socket joint based on acoustic emission and pattern recognition. Measurement 2018, 115, 39–44. [Google Scholar] [CrossRef]
- Ostapkowicz, P. Leak detection in liquid transmission pipelines using simplified pressure analysis techniques employing a minimum of standard and non-standard measuring devices. Eng. Struct. 2016, 113, 194–205. [Google Scholar] [CrossRef]
- Abdulshaheed, A.; Mustapha, F.; Ghavamian, A. A pressure-based method for monitoring leaks in a pipe distribution system: A Review. Renew. Sustain. Energy Rev. 2017, 69, 902–911. [Google Scholar] [CrossRef]
- Ghazali, M.F.; Beck, S.B.M.; Shucksmith, J.D.; Boxall, J.B.; Staszewski, W.J. Comparative study of instantaneous frequency based methods for leak detection in pipeline networks. Mech. Syst. Signal Process. 2012, 29, 187–200. [Google Scholar] [CrossRef]
- He, G.; Liang, Y.; Li, Y.; Wu, M.; Sun, L.; Xie, C.; Li, F. A method for simulating the entire leaking process and calculating the liquid leakage volume of a damaged pressurized pipeline. J. Hazard. Mater. 2017, 332, 19–32. [Google Scholar] [CrossRef] [PubMed]
- Ren, L.; Jiang, T.; Jia, Z.; Li, D.; Yuan, C.; Hongnan, L. Pipeline corrosion and leakage monitoring based on the distributed optical fiber sensing technology. Measurement 2018, 122, 57–65. [Google Scholar] [CrossRef]
- Barrias, A.; Casas, J.R.; Villalba, S. A review of distributed optical fiber sensors for civil engineering applications. Sensors 2016, 16, 748. [Google Scholar] [CrossRef] [PubMed]
- Hao, W.; Lin, H.S.; Pua, C.H.; Abd-Rahman, F. Pipeline monitoring and leak detection using Loop integrated Mach Zehnder Interferometer optical fiber sensor. Opt. Fiber Technol. 2018, 46, 221–225. [Google Scholar]
- Zhang, Y.; Chen, S.; Li, J.; Jin, S. Leak detection monitoring system of long distance oil pipeline based on dynamic pressure transmitter. Measurement 2014, 49, 382–389. [Google Scholar] [CrossRef]
- Gao, Y.; Brennan, M.J.; Joseph, P.F.; Muggleton, J.M.; Hunaidi, O. On the selection of acoustic/vibration sensors for leak detection in plastic water pipes. J. Sound Vib. 2005, 283, 927–941. [Google Scholar] [CrossRef]
- Liu, C.; Li, Y.; Meng, L.; Wang, W.; Zhang, F. Study on leak-acoustics generation mechanism for natural gas pipelines. J. Loss Prev. Process Ind. 2014, 32, 174–181. [Google Scholar] [CrossRef]
- Hunaidi, O.; Chu, W.T. Acoustical characteristics of leak signals in plastic water distribution pipes. Appl. Acoust. 1999, 58, 235–254. [Google Scholar] [CrossRef] [Green Version]
- Brennan, M.J.; Kroll De Lima, F.; De Almeida, F.C.L.; Joseph, P.F.; Paschoalini, A.T. A virtual pipe rig for testing acoustic leak detection correlators: Proof of concept. Appl. Acoust. 2016, 102, 137–145. [Google Scholar] [CrossRef] [Green Version]
- Wang, F.; Lin, W.; Liu, Z.; Wu, S.; Qiu, X. Pipeline Leak Detection by Using Time-Domain Statistical Features. IEEE Sens. J. 2017, 17, 6431–6442. [Google Scholar] [CrossRef]
- Oh, S.W.; Yoon, D.B.; Kim, G.J.; Bae, J.H.; Kim, H.S. Acoustic data condensation to enhance pipeline leak detection. Nucl. Eng. Des. 2018, 327, 198–211. [Google Scholar] [CrossRef]
- Ostapkowicz, P. Leakage detection from liquid transmission pipelines using improved pressure wave technique. Eksploatacja I Niezawodność 2014, 16, 9–16. [Google Scholar]
- Wang, F.; Lin, W.; He, Z.; Wu, H. Pipeline leak detection and location based on model-free isolation of abnormal acoustic signals. Energies 2019, 12, 3172. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Cutoff Frequency (rad) | |
|---|---|---|---|
| Lower | Upper | ||
| (Hz) | 100 | 0.0058 | 0.6292 |
| 500 | 0.0011 | 0.1299 | |
| 1000 | 0.0005 | 0.0650 | |
| 2000 | 0.0002 | 0.0325 | |
| A(C/Pa) | 7 | 0.0058 | 0.6292 |
| 10 | 0.0058 | 0.6292 | |
| 50 | 0.0058 | 0.6292 | |
| 100 | 0.0058 | 0.6292 | |
| (s) | 3 | 0.0064 | 0.6298 |
| 20 | 0.0049 | 0.6284 | |
| 50 | 0.0049 | 0.6284 | |
| 100 | 0.0049 | 0.6284 | |
| (s) | 0.5 | 0.0192 | 0.6487 |
| 1 | 0.0103 | 0.6357 | |
| 2 | 0.0058 | 0.6292 | |
| 3 | 0.0045 | 0.6273 | |
| (s) | 0.001 | 0.0059 | 2.5386 |
| 0.01 | 0.0058 | 0.6292 | |
| 0.1 | 0.0052 | 0.0721 | |
| 1 | 0.0030 | 0.0120 | |
| Parameters | Pipeline | |
|---|---|---|
| Naphtha | Crude Oil | |
| Total Length () | 15.511 | 19.356 |
| Pipe Diameter () | 150 | 219 |
| Leak size () | 4 and 8 | 2 |
| Sound Velocity () | 1055 | 900 |
| Upstream Pressure () | 2.18 | 0.80 |
| Downstream Pressure () | 0.48 | 0.1 |
| Leak Location from upstream () | 9.476 | 8.5 |
| Sampling Frequency () | 50 | 100 |
| Pressure Sensor Type | STG74S of Honeywell | |
| Acoustic Sensor Type | Dynamic pressure sensor | |
| Sensor Location | Installed on both ends of the pipeline | |
| Pipeline | Signal | Missing Alarm Rate (%) | False Alarm Rate (%) | Maximum Relative Error (%) |
|---|---|---|---|---|
| Naphtha | Compensated signal | 0 | 0 | 0.29 |
| Acoustic signal | 0 | 0 | 0.26 | |
| Pressure Signal | 46.67 | 0 | 9.03 | |
| Crude oil | Compensated signal | 0 | 2 | 0.28 |
| Acoustic signal | 61.54 | 0 | 0.30 | |
| Pressure Signal | 53.85 | 5 | 10.68 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, F.; Lin, W.; Liu, Z.; Qiu, X. Pressure Signal Enhancement of Slowly Increasing Leaks Using Digital Compensator Based on Acoustic Sensor. Sensors 2019, 19, 4317. https://doi.org/10.3390/s19194317
Wang F, Lin W, Liu Z, Qiu X. Pressure Signal Enhancement of Slowly Increasing Leaks Using Digital Compensator Based on Acoustic Sensor. Sensors. 2019; 19(19):4317. https://doi.org/10.3390/s19194317
Chicago/Turabian StyleWang, Fang, Weiguo Lin, Zheng Liu, and Xianbo Qiu. 2019. "Pressure Signal Enhancement of Slowly Increasing Leaks Using Digital Compensator Based on Acoustic Sensor" Sensors 19, no. 19: 4317. https://doi.org/10.3390/s19194317
APA StyleWang, F., Lin, W., Liu, Z., & Qiu, X. (2019). Pressure Signal Enhancement of Slowly Increasing Leaks Using Digital Compensator Based on Acoustic Sensor. Sensors, 19(19), 4317. https://doi.org/10.3390/s19194317