Analysis of the Influence of Different Settings of Scan Sequence Parameters on Vibration and Noise Generated in the Open-Air MRI Scanning Area †



Abstract
:1. Introduction
2. Subject and Methods
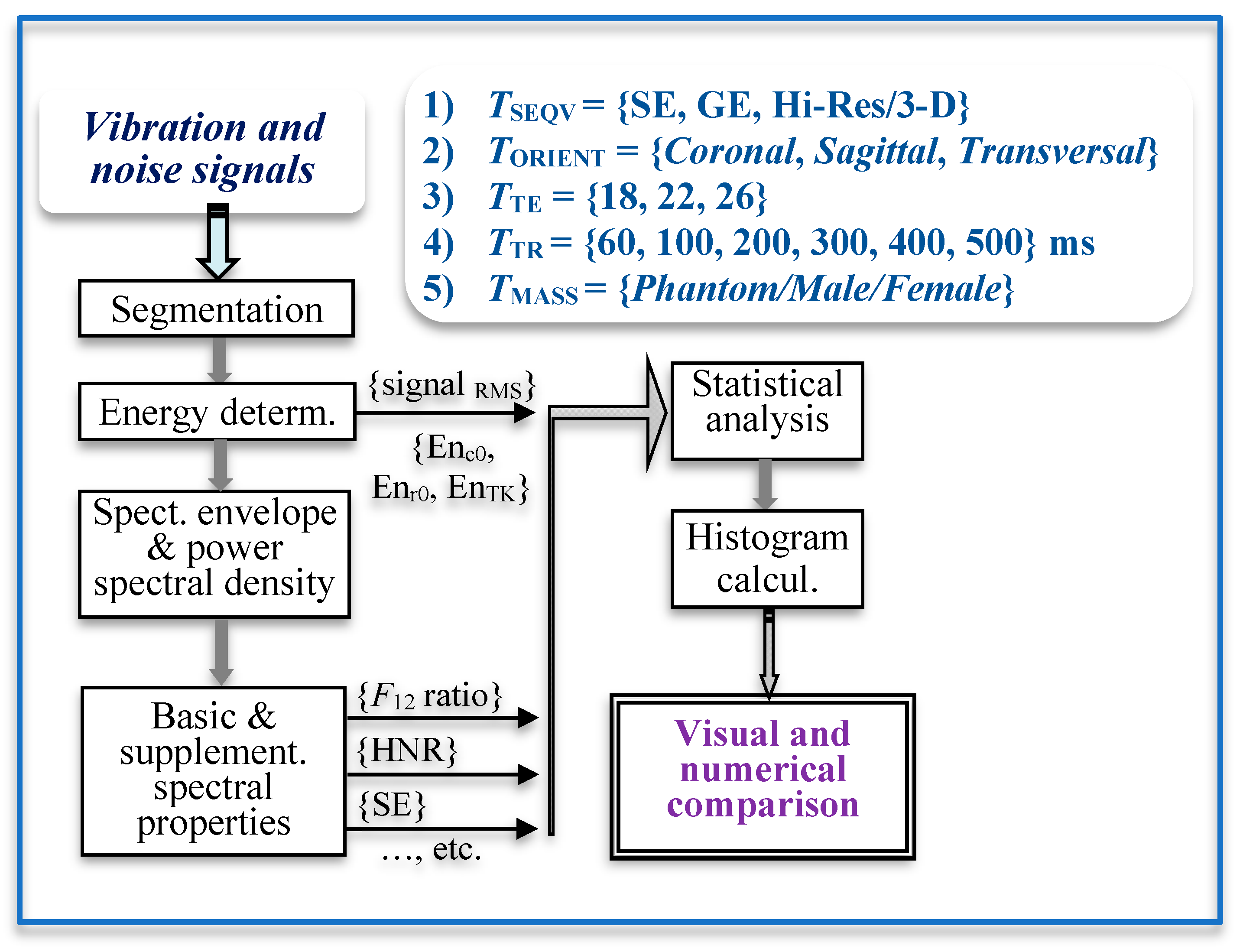
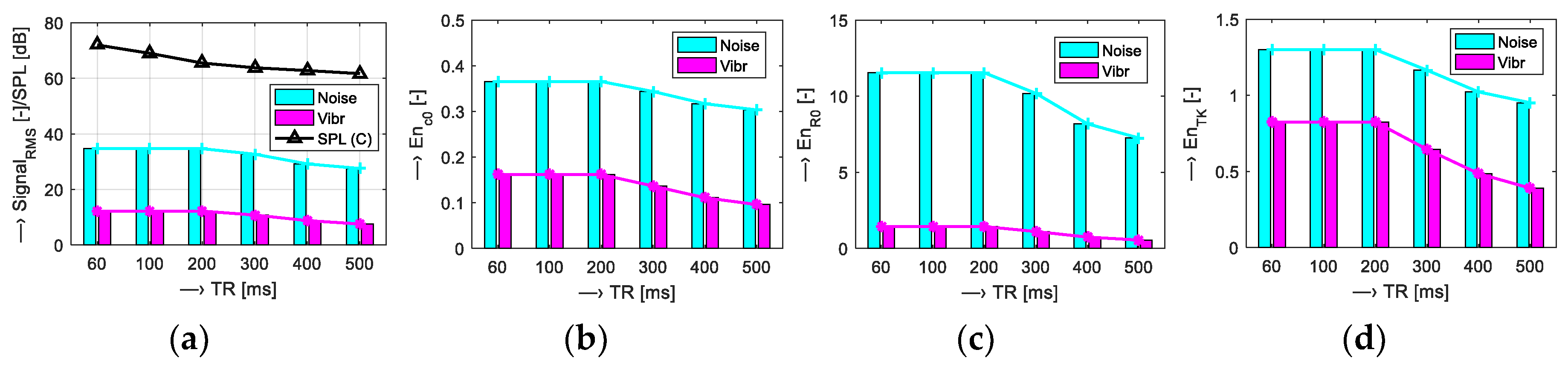
- The standard root mean square (RMS) is calculated from a signal x(n) in a defined frame (window) with the length of M samples:
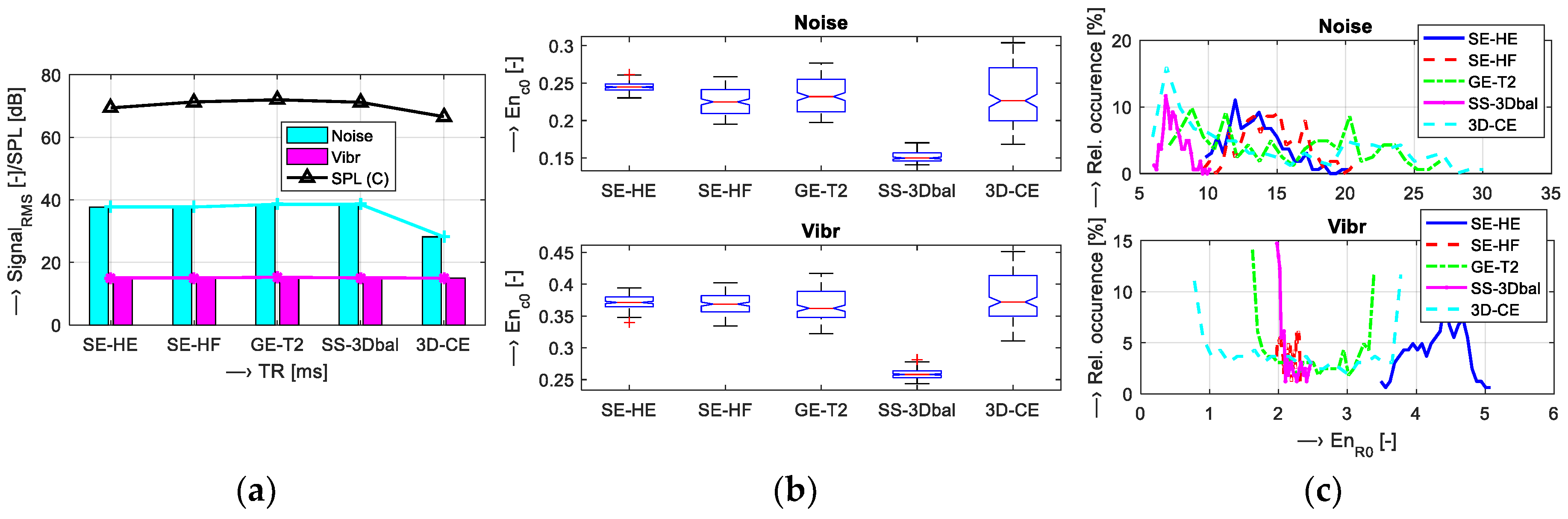
- The third approach uses the short-term NFFT-point fast Fourier transform (FFT) to compute the power spectrum |S(k)|2, and in each frame, the energy is assessed from the first cepstral coefficient c0 or from the autocorrelation coefficient r0:
3. Performed Experiments and Results
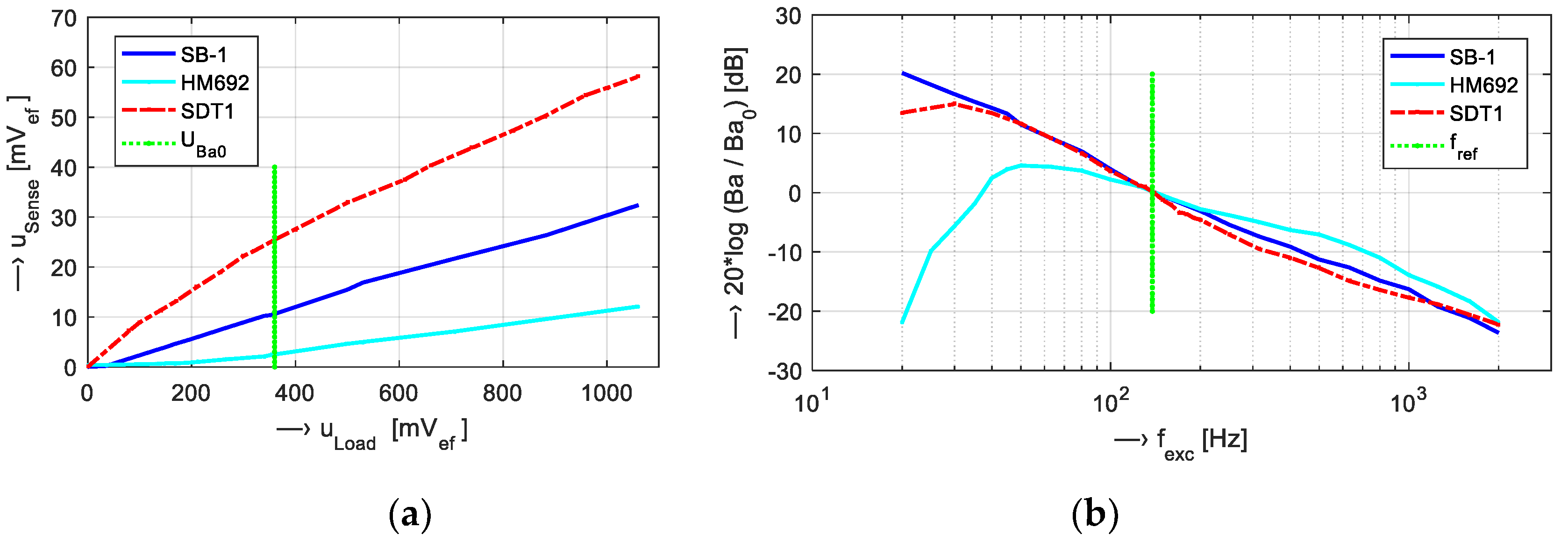
3.1. Automatic Measurement of Relative Sensitivity and Frequency Response of Vibration Sensors Suitable for Working in the Low Magnetic Field Environment
- RFT heart microphone device HM 692 with a 20-mm disc transducer comprising a piezoelectric element integrated in the aluminum metal cover with a 30-mm diameter; and
- SDT1-028K sensor (by Sensor Solutions—TE Connectivity) consisting of a rectangular piezo film element (with dimensions of 28.6 × 11.2 × 0.13 mm), together with a molded plastic housing, typically used in safety and industrial applications.
- Relative sensitivity at the reference frequency fref = 125 Hz; and
- Frequency response in the range of 20 Hz to 2 kHz at a chosen AP S1 output voltage for the vibration exciter (UBa0 = 360 mVef = 1 V p-p).
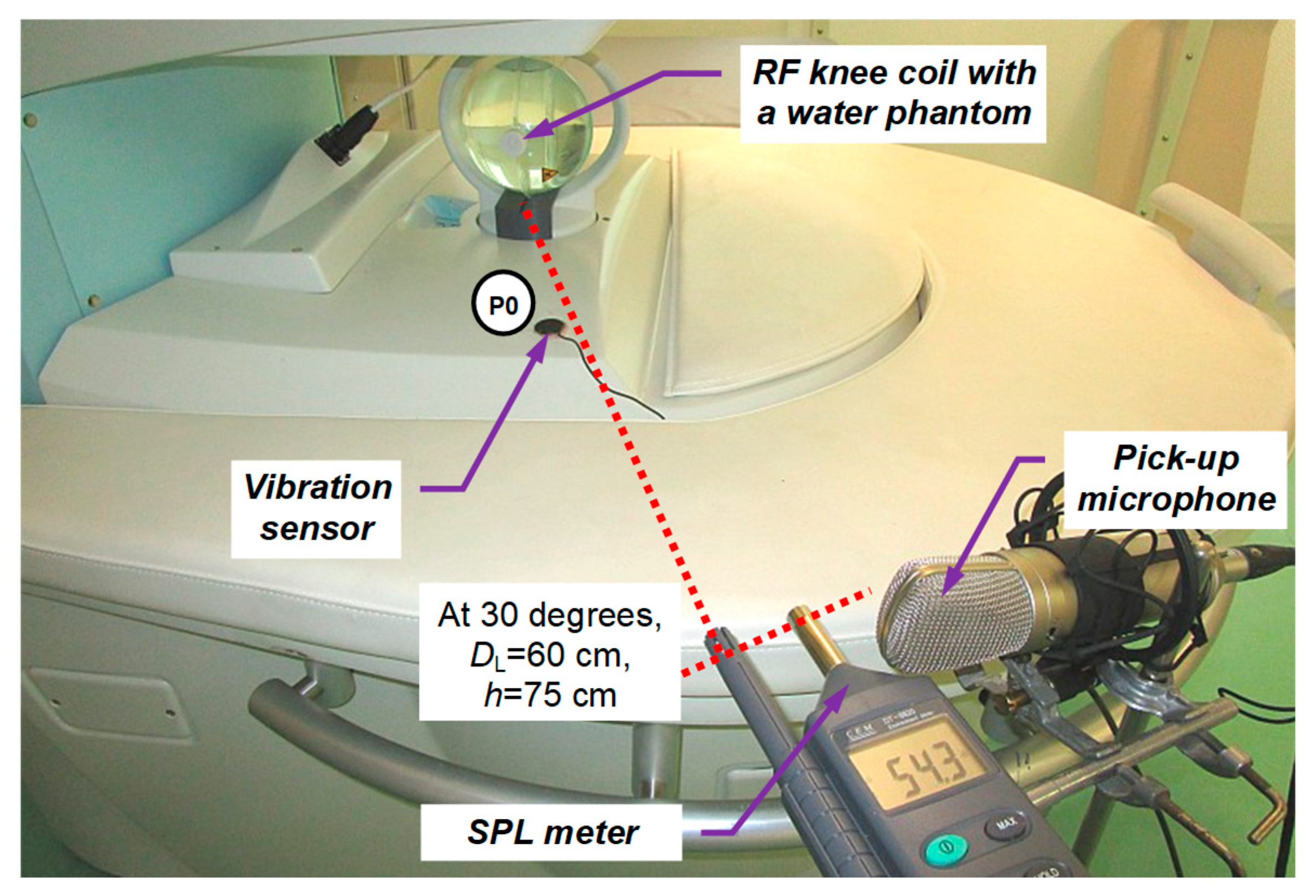
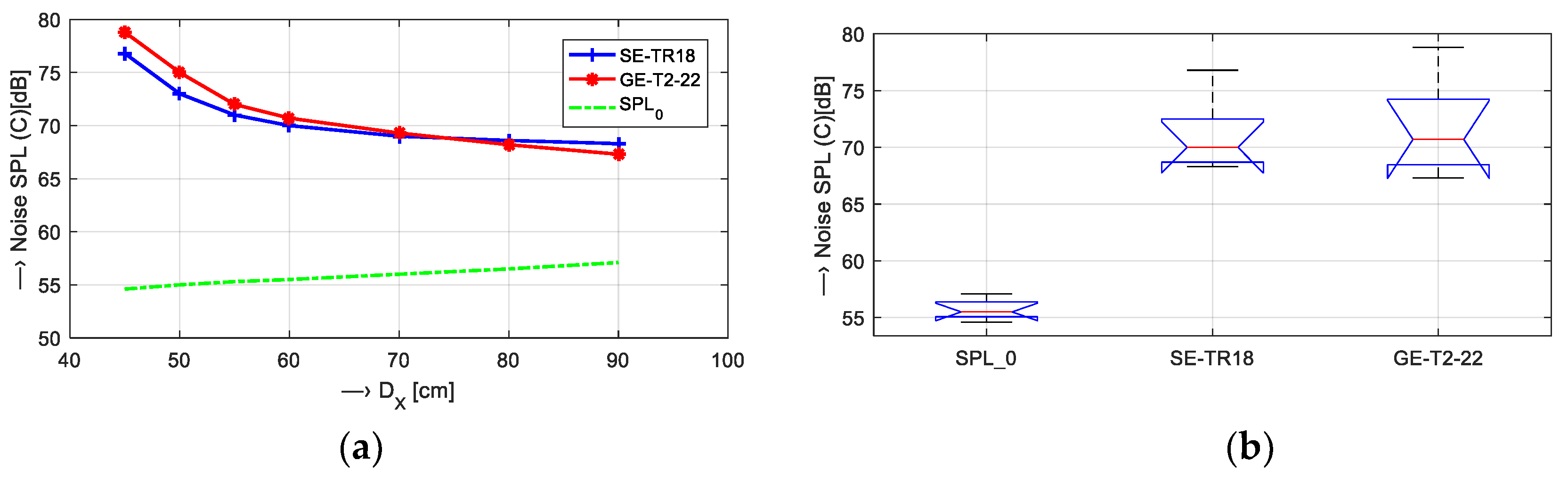
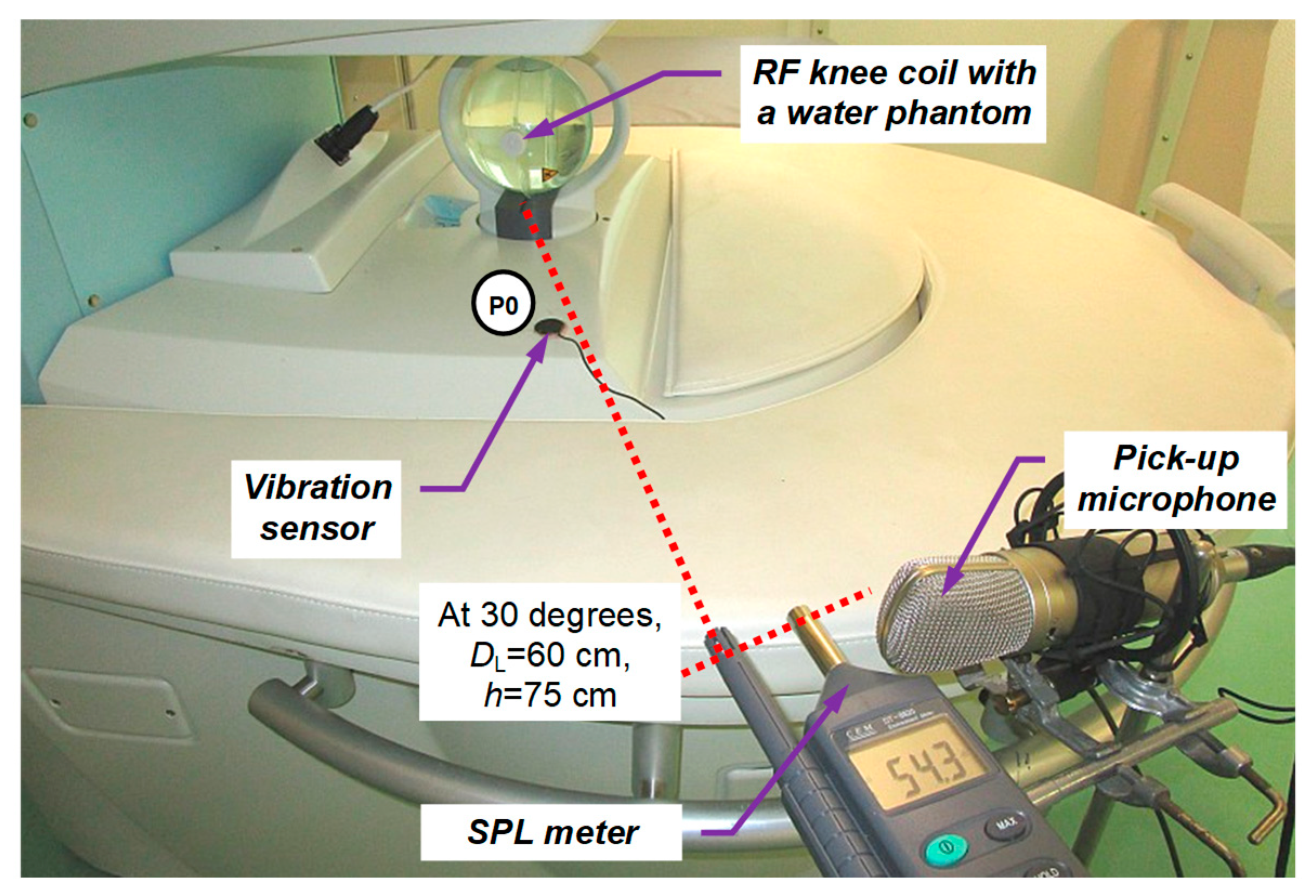
3.2. Description of Main Measurement and Auxiliary Experiments
- SE sequences (11 sub-types);
- GE sequences (9 sub-types);
- Turbo (multi echo) sequences (4 sub-types);
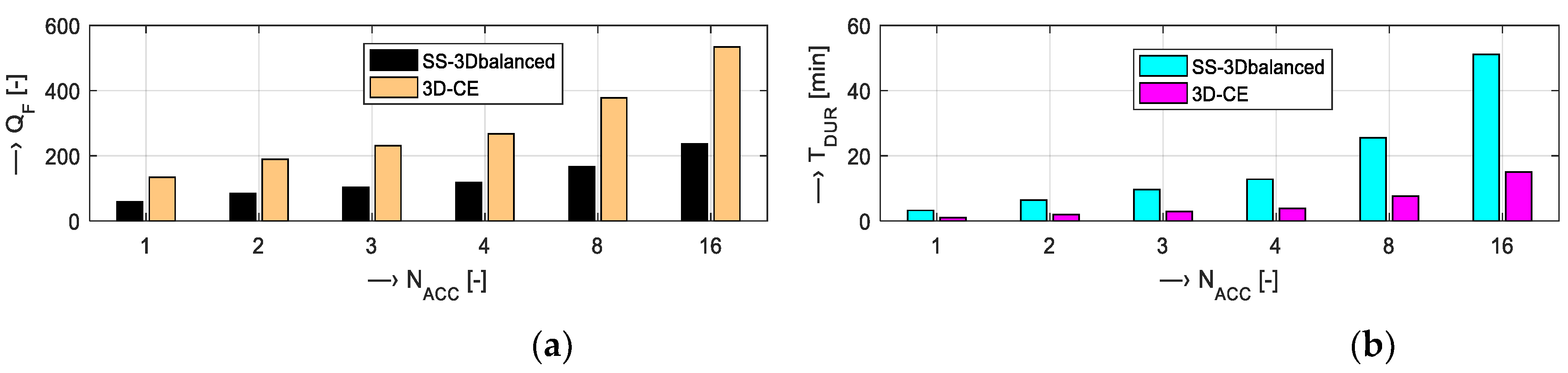
- 3D sequences (5 sub-types); and
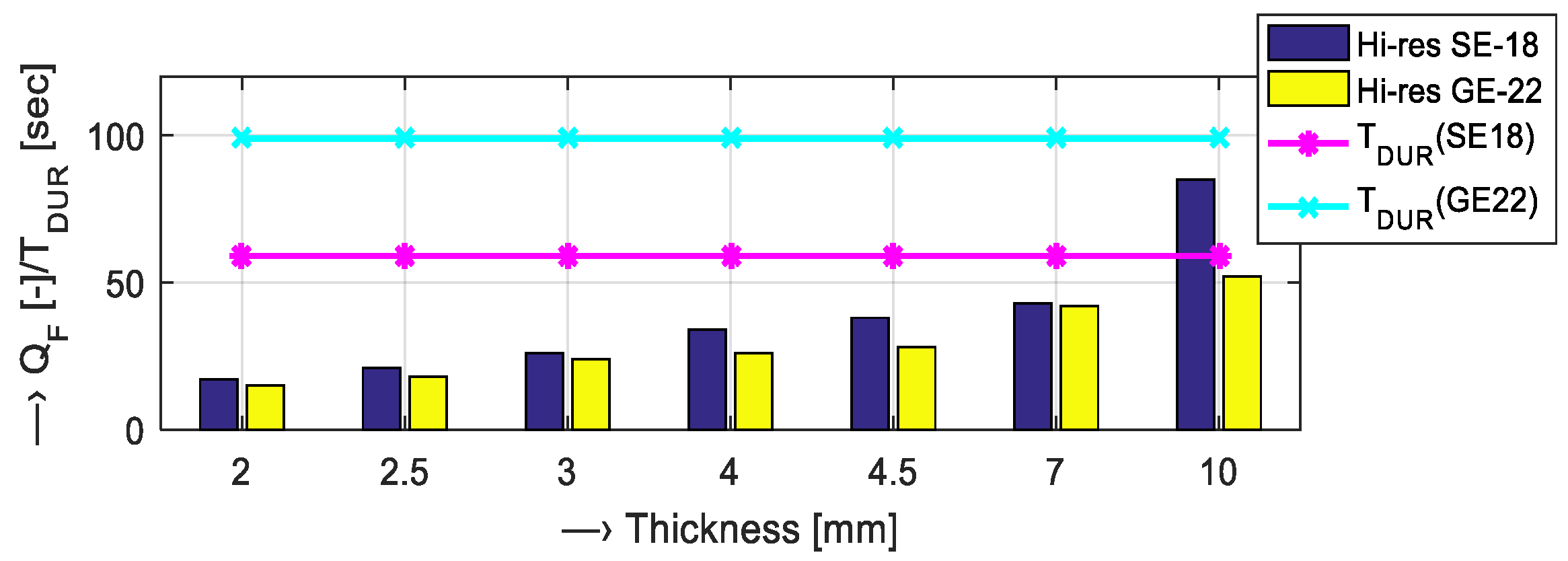
- Hi-Res sequences (8 sub-types).
- High-resolution SE/GE pulse sequences (Hi-Res); and
- 3D sequences to create 3D models of various biological objects.
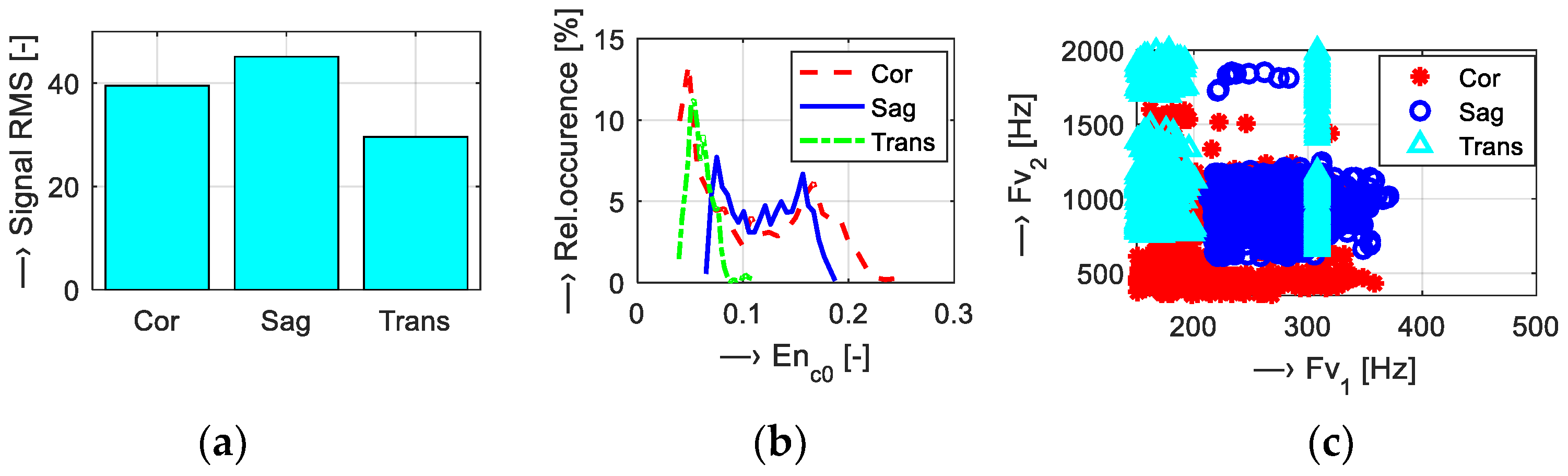
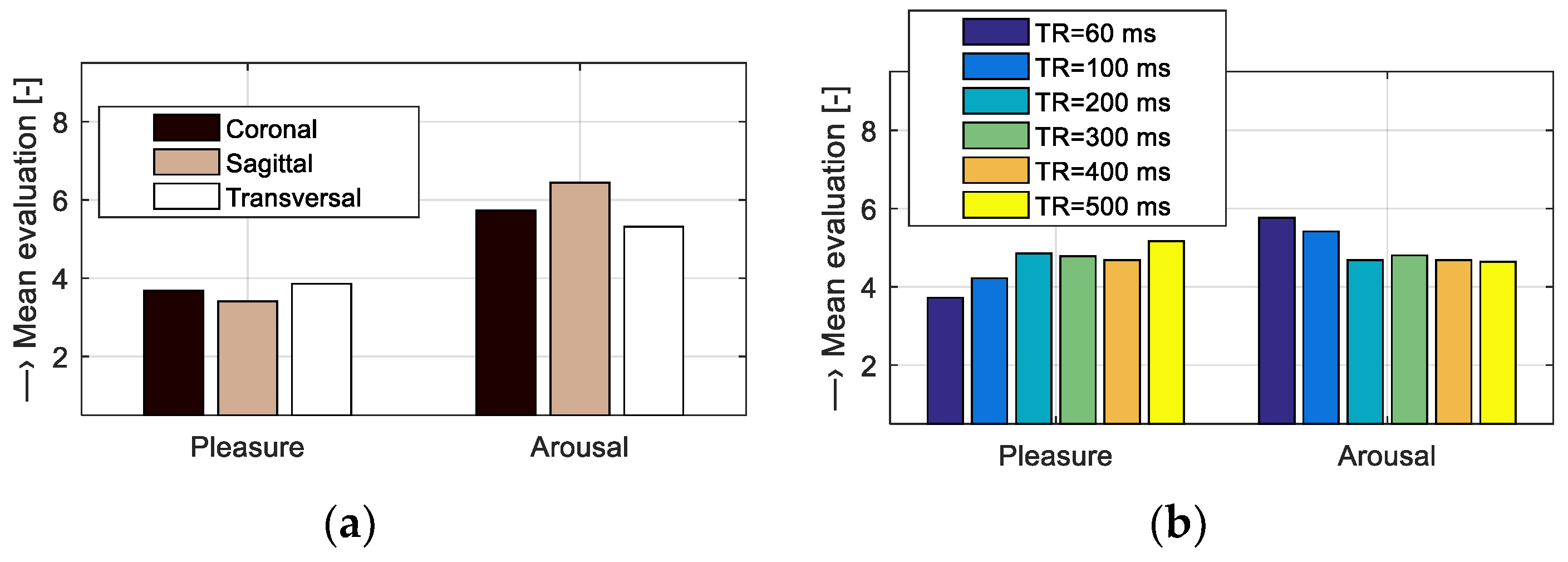
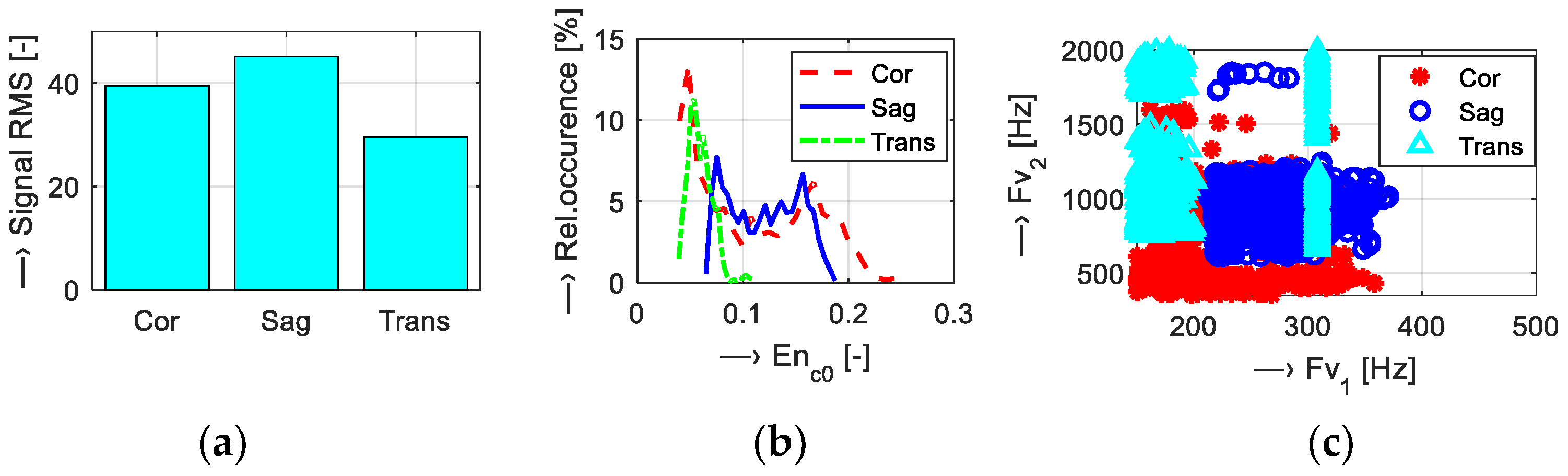
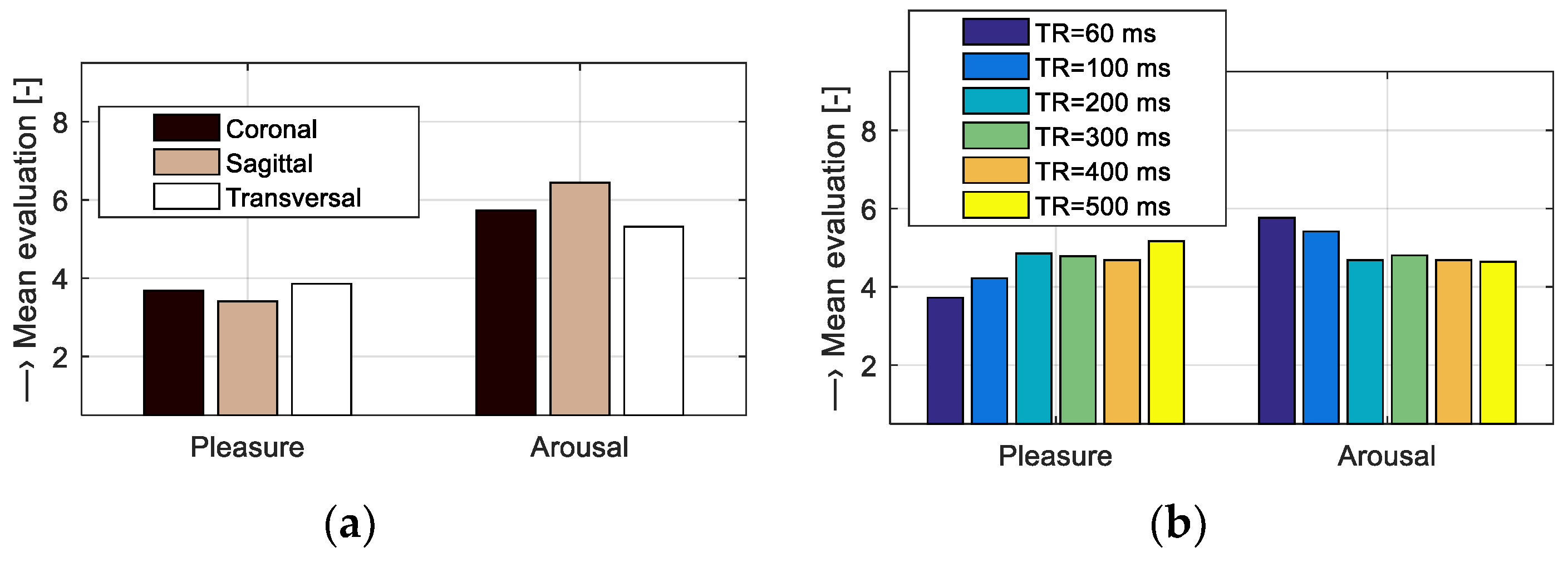
- Scan slice orientation TORIENT = {Coronal, Sagittal, Transversal}—results for energetic and basic spectral features are visualized in Figure 6;
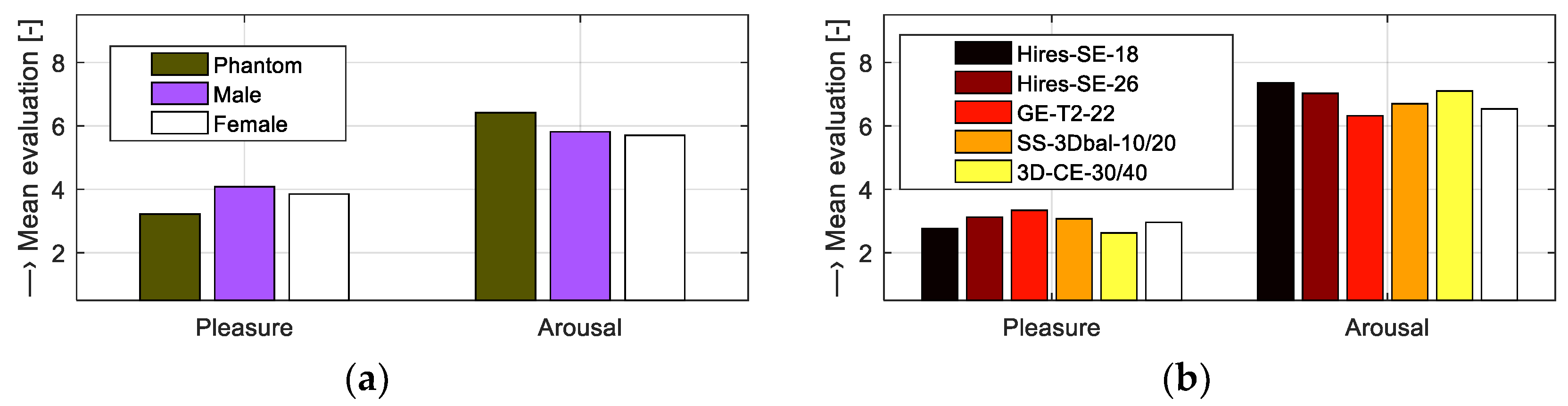
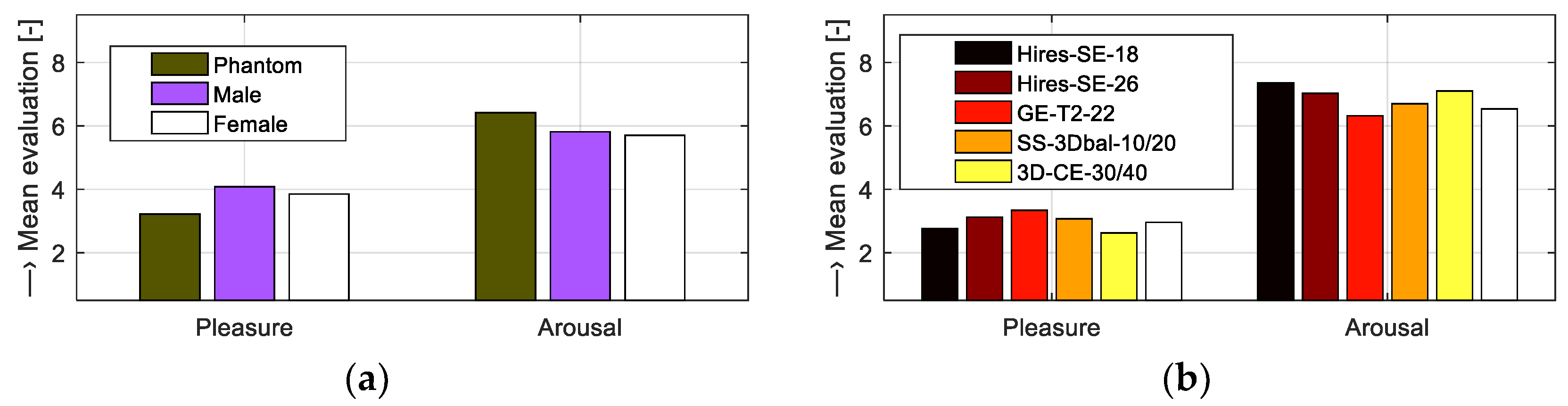
- Mass of the object/subject TMASS = {Phantom/Male/Female} placed in the MRI scanning area (the testing phantom with the total weight of 0.75 kg or a head and a neck of a lying male/female person weighing approximately 80/55 kg was placed in the RF scan coil between the upper and lower gradient coils of the MRI device)—numerical comparison can be found in Table 2.
3.3. Parameters Determinig the Scan Sequence Duration and the MR Image Quality Factor
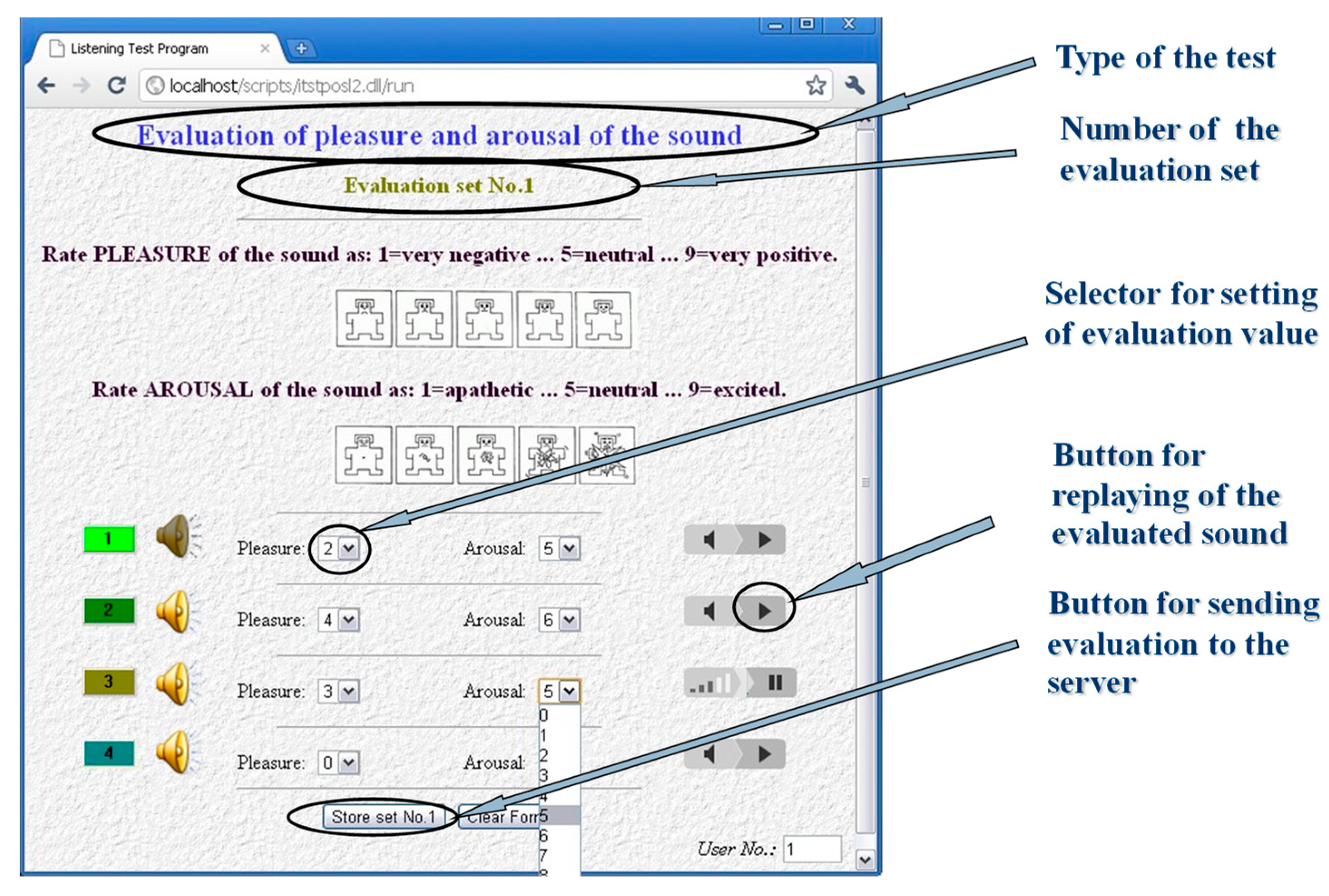
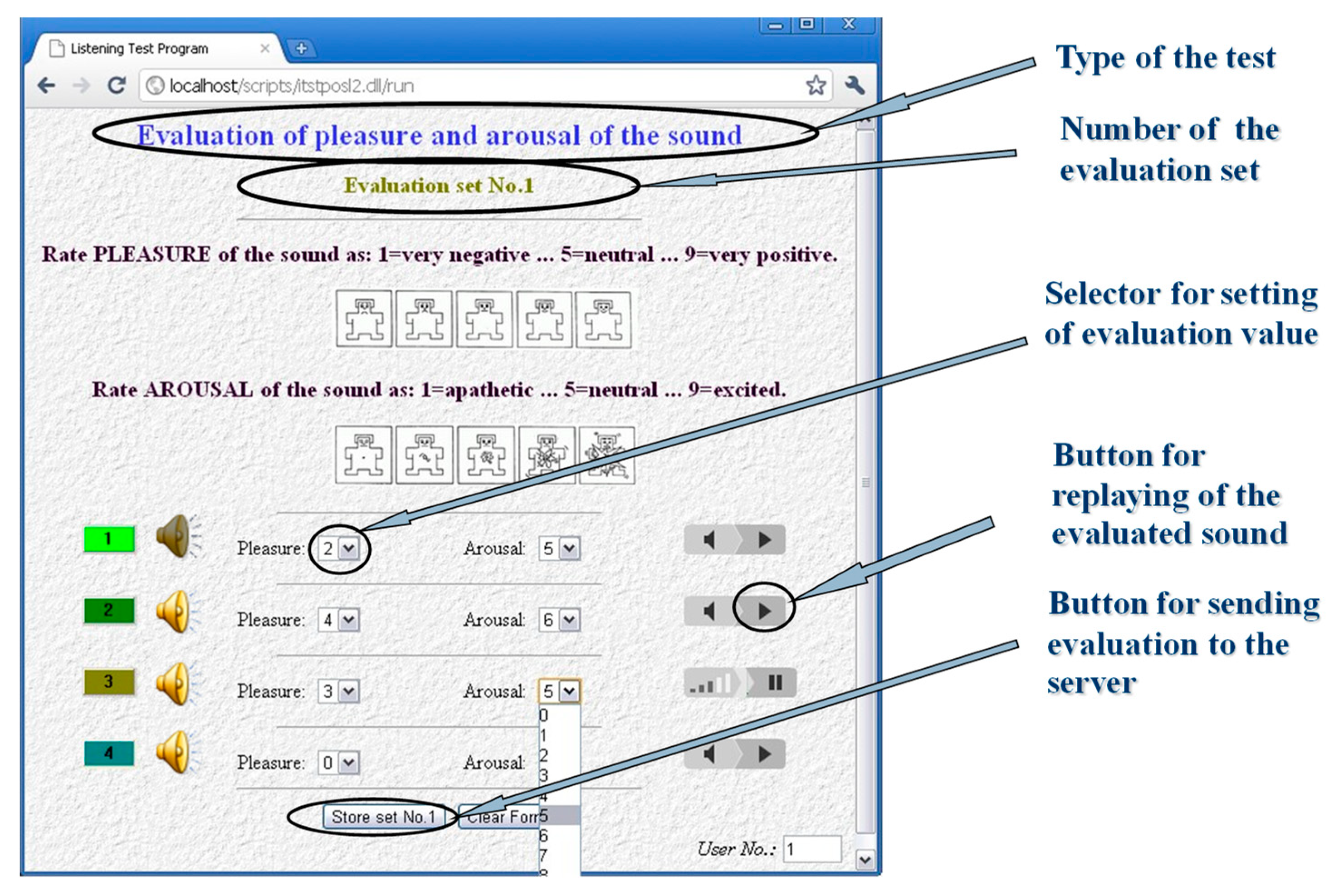
3.4. Subjective Evaluation by the Listening Test Method
4. Discussion of Obtained Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wellard, R.M.; Ravasio, J.P.; Guesne, S.; Bell, C.; Oloyede, A.; Tevelen, G.; Pope, J.M.; Momot, K.I. Simultaneous magnetic resonance imaging and consolidation measurement of articular cartilage. Sensors 2014, 14, 7940–7958. [Google Scholar] [CrossRef]
- Filippi, M.; Preziosa, P.; Rocca, M.A. Brain mapping in multiple sclerosis: Lessons learned about the human brain. NeuroImage 2019, 190, 32–45. [Google Scholar] [CrossRef] [PubMed]
- Masqsood, M.; Nazir, F.; Khan, U.; Aadil, F.; Jamal, H.; Mehmood, I.; Song, O. Transfer learning assisted classification and detection of Alzheimer’s disease stages using 3D MRI scans. Sensors 2019, 19, 2645. [Google Scholar] [CrossRef] [PubMed]
- Nedoma, J.; Kepak, S.; Fajkus, M.; Cubik, J.; Siska, P.; Martinek, R.; Krupa, P. Magnetic resonance imaging compatible non-invasive fibre-optic sensors based on the Bragg gratings and interferometers in the application of monitoring heart and respiration rate of the human body: A comparative study. Sensors 2018, 18, 3713. [Google Scholar] [CrossRef] [PubMed]
- Fischbach, K.; Kosiek, O.; Friebe, B.; Wybranski, C.; Schnackenburg, B.; Schmeisser, A.; Smid, J.; Ricke, J.; Pech, M. Cardiac Magnetic Resonance Imaging Using an Open 1.0T MR Platform: A Comparative Study ith a 1.5T Tunnel System. Pol. J. Radiol. 2017, 82, 498–505. [Google Scholar] [CrossRef] [PubMed]
- Esaote SpA. E-Scan Opera. User’s Manual; Revision A; Esaote SpA: Genoa, Italy, 2008. [Google Scholar]
- Panych, L.P.; Madore, B. The physics of MRI safety. J. Magn. Reson. Imaging 2018, 47, 28–43. [Google Scholar] [CrossRef] [PubMed]
- Schickhofer, L.; Malinen, J.; Mihaescu, M. Compressible flow simulations of voiced speech using rigid vocal tract geometries acquired by MRI. J. Acoust. Soc. Am. 2019, 145, 2049–2061. [Google Scholar] [CrossRef] [PubMed]
- Bresch, E.; Nielsen, J.; Nayak, K.; Narayanan, S. Synchronized and noise-robust audio recordings during real-time magnetic resonance imaging scans. J. Acoust. Soc. Am. 2006, 120, 1791–1794. [Google Scholar] [CrossRef] [PubMed]
- Optoacoustics, Ltd. FOMRI-III™ Fiber Optic Microphone for Functional MRI (Version 1.2, January 2010). Available online: http://www.optoacoustics.com/ (accessed on 11 April 2012).
- Alimohammadi, I.; Kanrash, F.A.; Abolaghasemi, J.; Afrazandeh, H.; Rahmani, K. Effect of Chronic Noise Exposure on Aggressive Behavior of Automotive Industry Workers. Int. J. Occup. Environ. Med. 2018, 9, 170–175. [Google Scholar] [CrossRef] [PubMed]
- Diedrichsen, J.; Balsters, J.H.; Flavell, J.; Cussans, E.; Ramnani, R. A probabilistic MR atlas of the human cerebellum. NeuroImage 2009, 46, 39–46. [Google Scholar] [CrossRef] [PubMed]
- Bernstein, M.A.; King, K.F.; Zhou, X.J. Handbook of MRI Pulse Sequences; Elsevier Academic Press: Burlington, MA, USA, 2004. [Google Scholar]
- Boudraaa, A.-O.; Fabien Salzenstein, F. Teager–Kaiser energy methods for signal and image analysis: A review. Digit. Signal Process. 2018, 78, 338–375. [Google Scholar] [CrossRef]
- Přibil, J.; Přibilová, A.; Frollo, I. Mapping and spectral analysis of acoustic vibration in the scanning area of the weak field magnetic resonance imager. J. Vib. Acoust. 2014, 136, 51005. [Google Scholar] [CrossRef]
- Přibil, J.; Přibilová, A.; Frollo, I. Comparison of mechanical vibration and acoustic noise in the open-air MRI. Appl. Acoust. 2016, 105, 13–23. [Google Scholar] [CrossRef]
- Přibil, J.; Přibilová, A.; Frollo, I. Analysis of spectral properties of acoustic noise produced during magnetic resonance imaging. Appl. Acoust. 2012, 73, 687–697. [Google Scholar] [CrossRef]
- Trabelsi, I.; Bouhlel, M.S.; Dey, N. Discrete and continuous emotion recognition using sequence kernels. Int. J. Intell. Eng. Inform. 2017, 5, 194–205. [Google Scholar] [CrossRef]
- Nicolau, M.A.; Gunes, H.; Pantic, M. Continuous Prediction of Spontaneous Affect from Multiple Cues and Modalities in Valence-Arousal Space. IEEE Trans. Affect. Comput. 2011, 2, 92–105. [Google Scholar] [CrossRef]
- Přibil, J.; Přibilová, A. Internet Application for Collective Realization of Speech Evaluation by Listening Tests. In Proceedings of the International Conference on Applied Electronics (AE2013), Plzeň, Czech Republic, 10–12 September 2013; pp. 225–228. [Google Scholar]
- Bradley, M.M.; Lang, P.J. The International Affective Digitized Sounds (IADS-2): Affective Ratings of Sounds and Instruction Manual, 2nd ed.; Technical Report B-3; University of Florida: Gainesville, FL, USA, 2007. [Google Scholar]
- Přibil, J.; Přibilová, A.; Frollo, I. Analysis of Energy Relations between Noise and Vibration Signals in the Scanning Area of an Open-Air MRI Device. In Proceedings of the 5th International Electronic Conference on Sensors and Applications, 15–30 November 2018. [Google Scholar] [CrossRef]
- Přibil, J.; Přibilová, A.; Frollo, I. Analysis of Energy Relations between Noise and Vibration Produced by a Low-Field MRI Device. (to be published). [CrossRef]
- Přibil, J.; Gogola, D.; Dermek, T.; Frollo, I. Design, Realization and Experiments with a new RF Head Probe Coil for Human Vocal Tract Imaging in an NMR device. Meas. Sci. Rev. 2012, 12, 98–103. [Google Scholar] [CrossRef]
- Glowacz, A. Fault detection of electric impact drills and coffee grinders using acoustic signals. Sensors 2019, 19, 269. [Google Scholar] [CrossRef] [PubMed]
- Přibil, J.; Přibilová, A.; Frollo, I. Vibration and noise in magnetic resonance imaging of the vocal tract: Differences between whole-body and open-air devices. Sensors 2018, 18, 1112. [Google Scholar] [CrossRef] [PubMed]
- Valkovič, L.; Juráš, V.; Dermek, T.; Vojtíšek, L.; Frollo, I. The effect of stress on MR image contrast in the human hand at low field NMR. In ELITECH ’10, Proceedings of the 12th Conference of Doctoral Students; Kozáková, A., Ed.; Faculty of Electrical Engineering and Information Technology, Slovak University of Technology: Bratislava, Slovakia, 2010; ISBN 978-80-227-3303-8. [Google Scholar]
- Hu, S.; Peris, V.A.; Echiadis, A.; Zheng, J.; Shi, P. Development of effective photoplethysmographic measurement techniques: From contact to non-contact and from point to imaging. In Proceedings of the 2009 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Minneapolis, MN, USA, 3–6 September 2009. [Google Scholar] [CrossRef]
- Daimiwal, N.; Sundhararajan, M.; Shriram, R. Comparative analysis of LDR and OPT 101 detectors in reflectance type PPG sensor. In Proceedings of the International Conference on Communication and Signal Processing, Melmaruvathur, India, 3–5 April 2014. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Name of Sequence | TE (ms) | TR (ms) | FOV | Matrix Size |
|---|---|---|---|---|---|
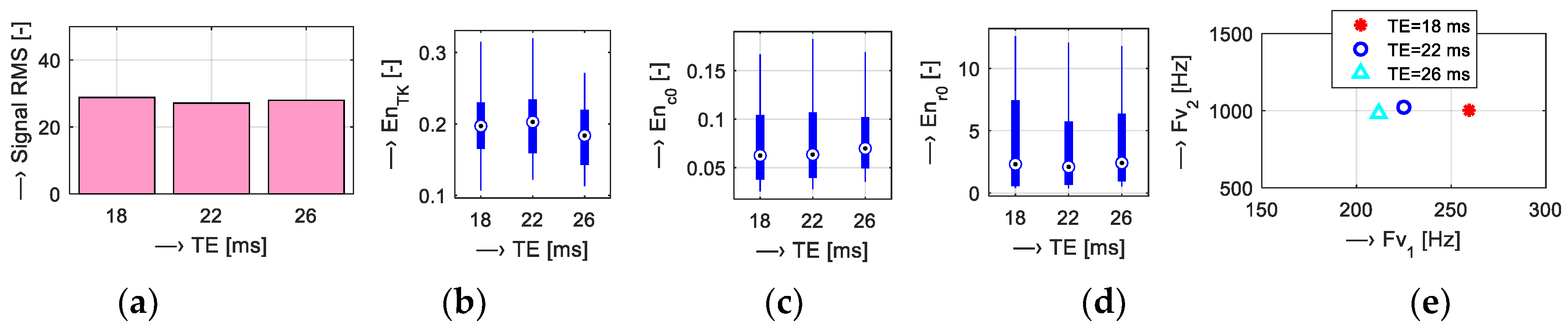
| Hi-Res | SE 18 HF | 18 | 500 | 250 × 250 × 200 | 256 × 256 |
| Hi-Res | SE 26 HF | 26 | 500 | 250 × 250 × 200 | 256 × 256 |
| Hi-Res | GE T2 | 22 | 60 | 250 × 250 × 200 | 256 × 256 |
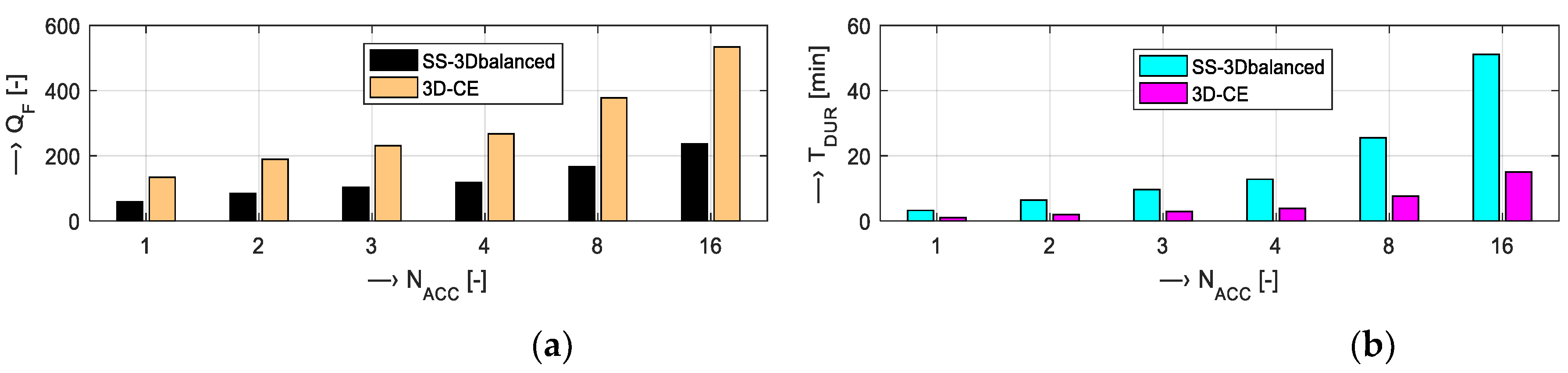
| 3D | SS 3D balanced | 5 | 10 | 200 × 200 × 192 | 200 × 200 |
| 3D | 3D-CE | 30 | 40 | 150 × 150 × 192 | 192 × 192 |
| Subject Type 1 | Vibrations (SB-1) | Noise (B2-Pro) | ||||||
|---|---|---|---|---|---|---|---|---|
| RMS | EnTK | Enc0 | Enr0 | RMS | EnTK | Enc0 | Enr0 | |
| Water phantom | 34.6 | 4.69 | 0.0380 | 24.0 | 20.1 | 4.05 | 0.0255 | 8.5 |
| Female | 28.7 | 4.93 | 0.0402 | 16.6 | 23.2 | 4.19 | 0.0286 | 10.6 |
| Male | 26.8 | 4.96 | 0.0404 | 14.4 | 25.5 | 4.51 | 0.0328 | 15.9 |
| NACC [–] | Parameters | TR [ms] | |||||
|---|---|---|---|---|---|---|---|
| 60 | 100 | 200 | 300 | 400 | 500 | ||
| 1 | QF [–] | 6 | 12 | 23 | 32 | 38 | 42 |
| TDUR [min:sec] | 0:09 | 0:14 | 0:25 | 0:36 | 0:48 | 0:59 | |
| 8 | QF [–] | 16 | 33 | 66 | 90 | 107 | 500 |
| TDUR [min:sec] | 0:57 | 1:33 | 3:04 | 4:34 | 6:04 | 7:35 | |
| 16 | QF [–] | 23 | 47 | 93 | 127 | 151 | 168 |
| TDUR [min:sec] | 1:51 | 3:03 | 6:04 | 9:05 | 12:06 | 15:07 | |
| NACC [–] | Parameters | TR [ms] | |||||
|---|---|---|---|---|---|---|---|
| 60 | 100 | 200 | 300 | 400 | 500 | ||
| 1 | QF [–] | 15 | 18 | 24 | 26 | 27 | 28 |
| TDUR [min:sec] | 0:14 | 0:24 | 0:42 | 1:00 | 1:20 | 1:39 | |
| 8 | QF [–] | 42 | 52 | 67 | 74 | 77 | 79 |
| TDUR [min:sec] | 1:35 | 2:37 | 5:12 | 7:46 | 10:20 | 12:55 | |
| 16 | QF [–] | 59 | 74 | 95 | 104 | 109 | 112 |
| TDUR [min:sec] | 3:08 | 5:11 | 10:20 | 15:29 | 20:38 | 25:47 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Přibil, J.; Přibilová, A.; Frollo, I. Analysis of the Influence of Different Settings of Scan Sequence Parameters on Vibration and Noise Generated in the Open-Air MRI Scanning Area. Sensors 2019, 19, 4198. https://doi.org/10.3390/s19194198
Přibil J, Přibilová A, Frollo I. Analysis of the Influence of Different Settings of Scan Sequence Parameters on Vibration and Noise Generated in the Open-Air MRI Scanning Area. Sensors. 2019; 19(19):4198. https://doi.org/10.3390/s19194198
Chicago/Turabian StylePřibil, Jiří, Anna Přibilová, and Ivan Frollo. 2019. "Analysis of the Influence of Different Settings of Scan Sequence Parameters on Vibration and Noise Generated in the Open-Air MRI Scanning Area" Sensors 19, no. 19: 4198. https://doi.org/10.3390/s19194198
APA StylePřibil, J., Přibilová, A., & Frollo, I. (2019). Analysis of the Influence of Different Settings of Scan Sequence Parameters on Vibration and Noise Generated in the Open-Air MRI Scanning Area. Sensors, 19(19), 4198. https://doi.org/10.3390/s19194198