Detecting Moments of Stress from Measurements of Wearable Physiological Sensors


 ,
,  , ,
, ,  ,
,  and
and
Abstract
1. Introduction
2. Related Work
2.1. Physiological Parameters as Indicators of Stress
2.2. Stress and Stress Level Detection
2.3. Stress Detection Using Wearable Sensors
2.4. Research Gap
3. Methodology and Laboratory Experiment
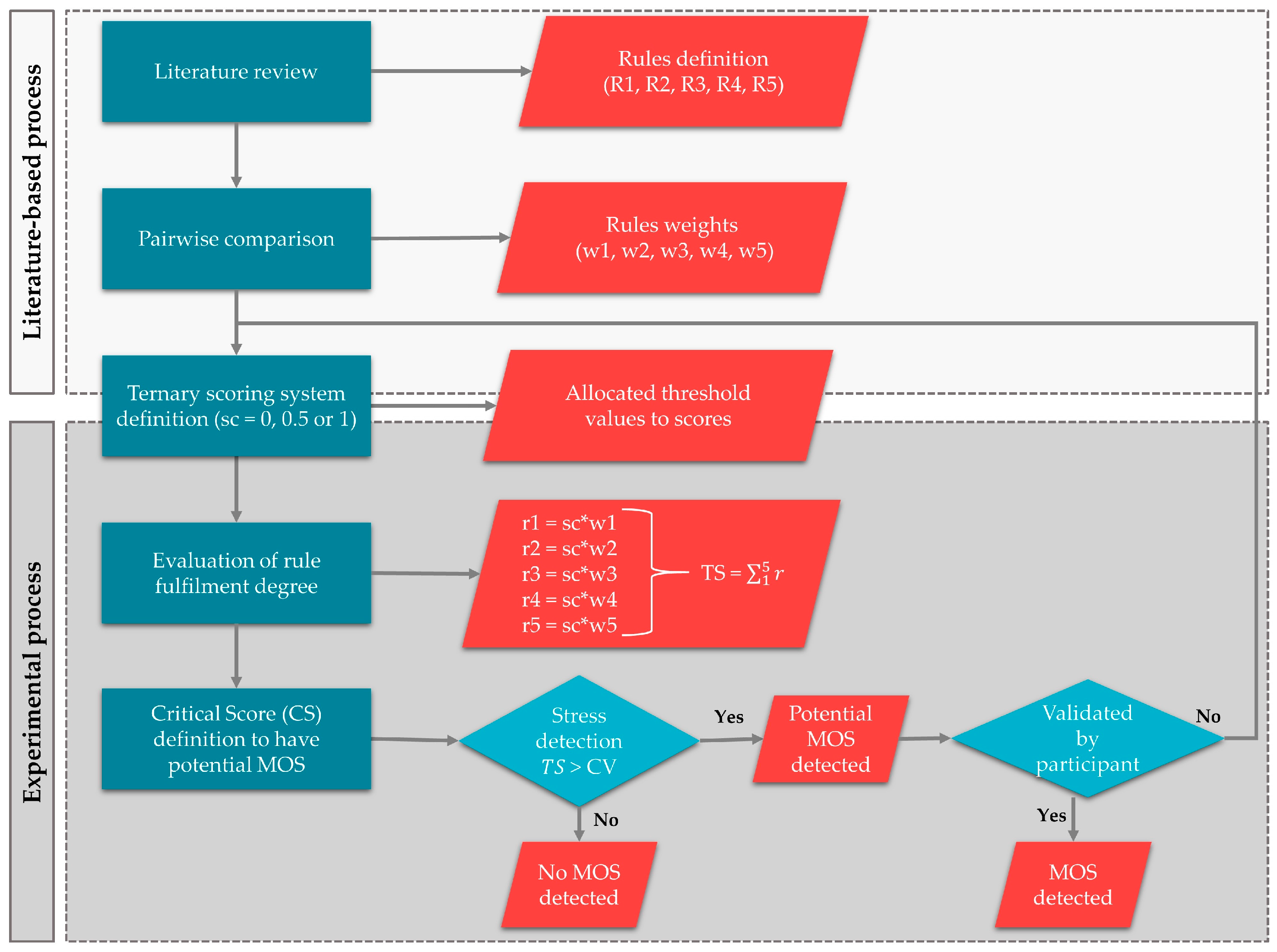
3.1. Algorithm for the Detection of Moments of Stress
3.1.1. From Bio-Sensing to Bio-Geodatabase
3.1.2. Data Pre-Processing
3.1.3. Algorithm Development
3.2. Laboratory Experiment
3.2.1. Subjects
3.2.2. Experimental Protocol
3.3. Algorithm Validation in Real-World Settings
- Spatial analysis of MOS: a spatial analysis of the geo-located MOS was performed to identify spatial patterns in urban areas. We used a MOS ratio to standardize the data. This method is described with detail in [76]. Then we performed hotspots analysis, which based on Tobler’s first law of geography “Everything is related to everything else, but near things are more related than distant things” [77]. This low is quantified by the presence of significant spatial autocorrelation [78]. Thus, we perform a hot spot analysis by using the Gi* method [79] using the following equation:where and
- 2.
- eDiary: we introduced the eDiary app and we asked participants to input their perceived emotional state by pressing a button on the smartphone’s screen and input their perceived emotions during the trips. The eDiary app is described in Section 3.1.1. The collected data were geo-located point data with emotional state description (stress or calm) able to be projected on maps.
- 3.
- Ego-perspective videos: we mounted cameras on participants’ chests to record the trips. This permits us to visually identify the real-world situations which worked as objective emotional triggers and correlate them with the detected MOS from our algorithm.
- 4.
- Personal interviews: after the completion of one trip, the participants were asked to describe any stressful event that they experienced through an additional questionnaire survey. Privacy issues did not arise as the questions were as general as possible without asking sensitive topics to avoid putting them in an awkward situation. Participants’ concerns were also acquired.
4. Results
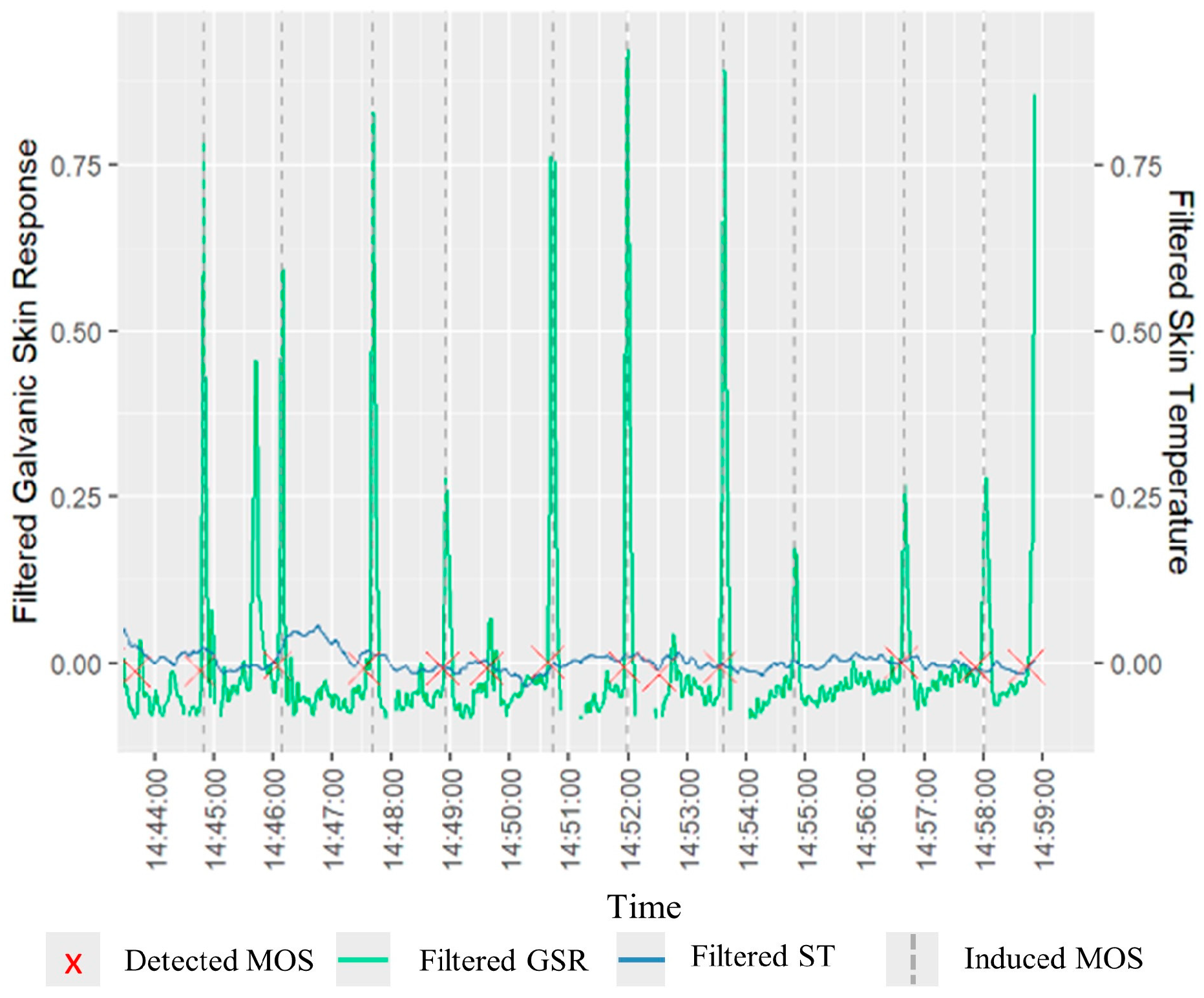
- O1—True Positives MOS (TP MOS). The algorithm was able to detect 6.9 TP MOS on average per participant while the participants perceived 8.5 MOS on average.
- O2—False positive MOS (FP MOS). The algorithm detected MOS at times where we did not induce any stimuli. We could associate the FP MOS with participants’ feedback: “I didn’t know when to expect the next stressor, and this stressed me” or “When we did not hear any stimuli I thought that I have such a busy day and this made me feel stressed”. FP MOS could also be associated with other intrinsic reasons which provoke stress, such as pain or fatigue [4]. Additionally, according to pathophysiology, an infection can cause the body’s temperature to rise internally, and several mechanisms can cause body temperature to rise externally. Thus, we cannot exclude the possibility of variations at skin temperature that led to false positive MOS cause of fever states even though we recruited healthy participants and we did not find indications for fever [81].
- O3—Discordance between self-report stress and physiology indicators. The algorithm detected MOS at times when we induced a stimulus, but the participants perceived “no stress” based on the questionnaire responses.
5. Real-World Field Studies
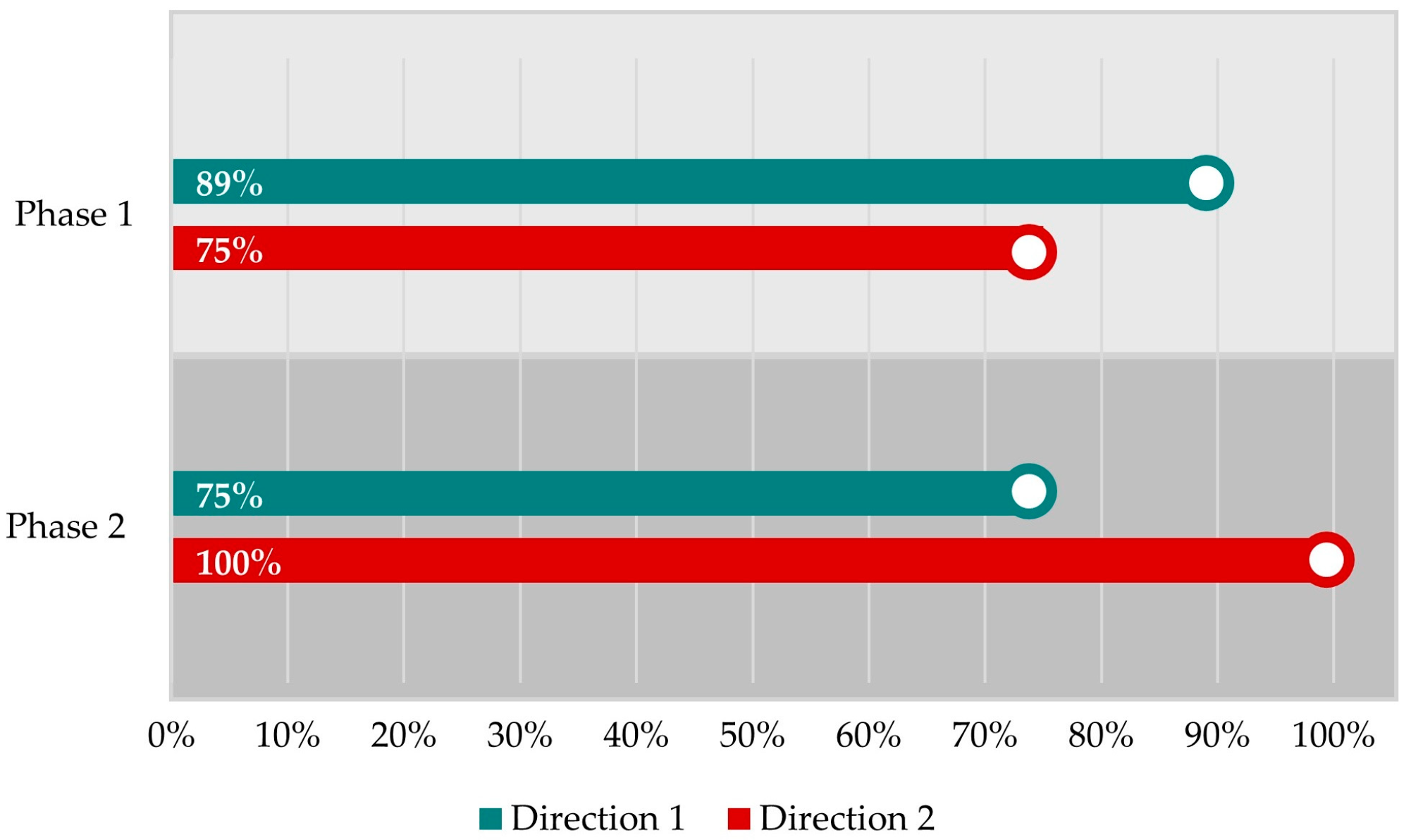
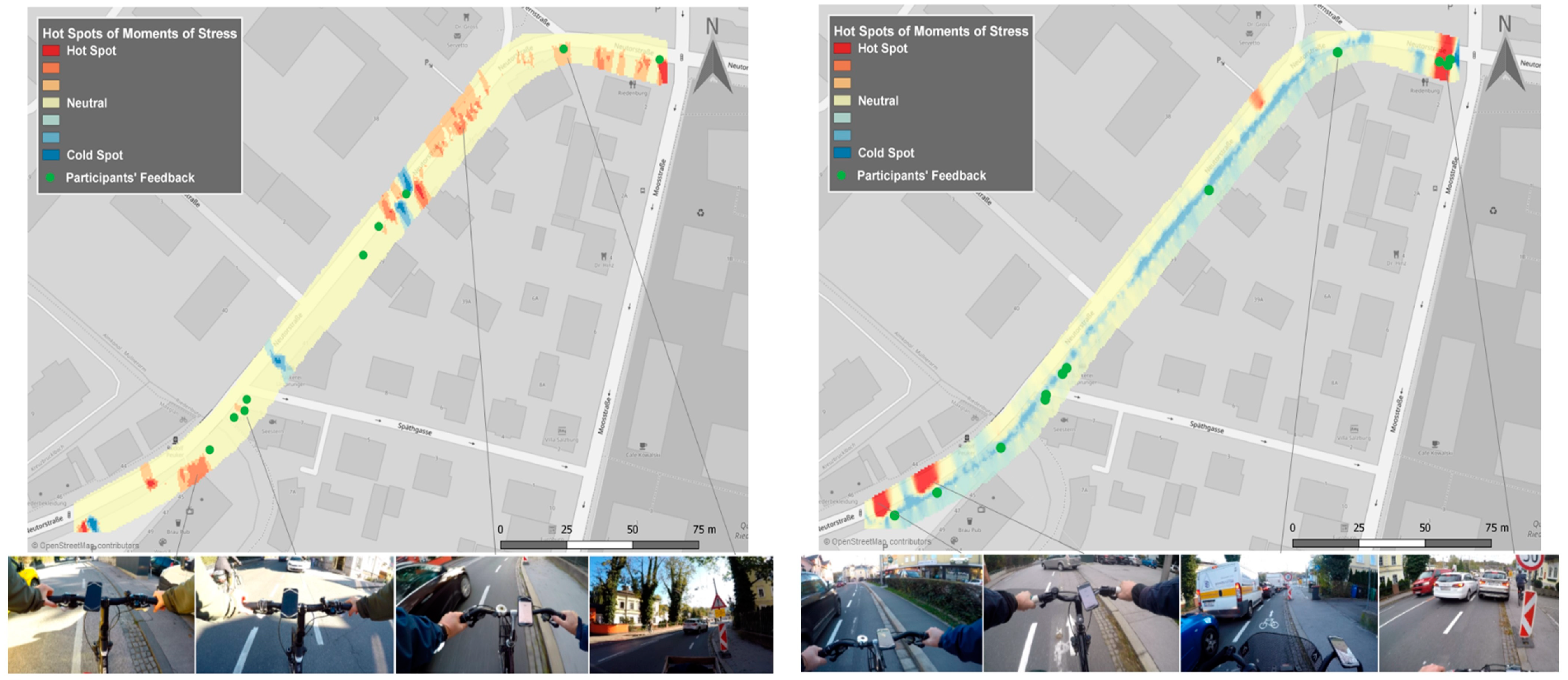
5.1. Multi-Purpose Bike Lane and Cyclists’ Safety
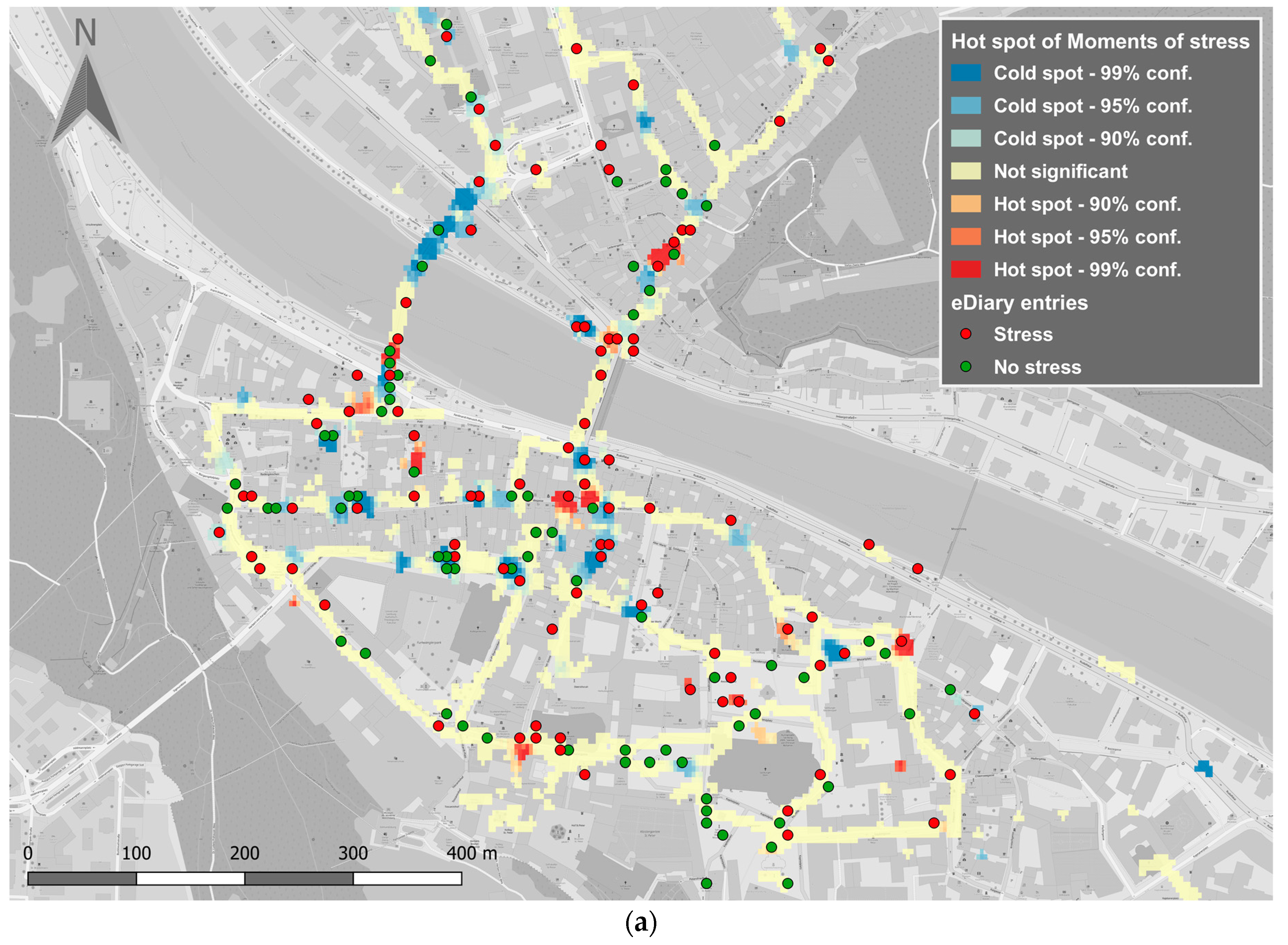
5.2. Urban Walkability
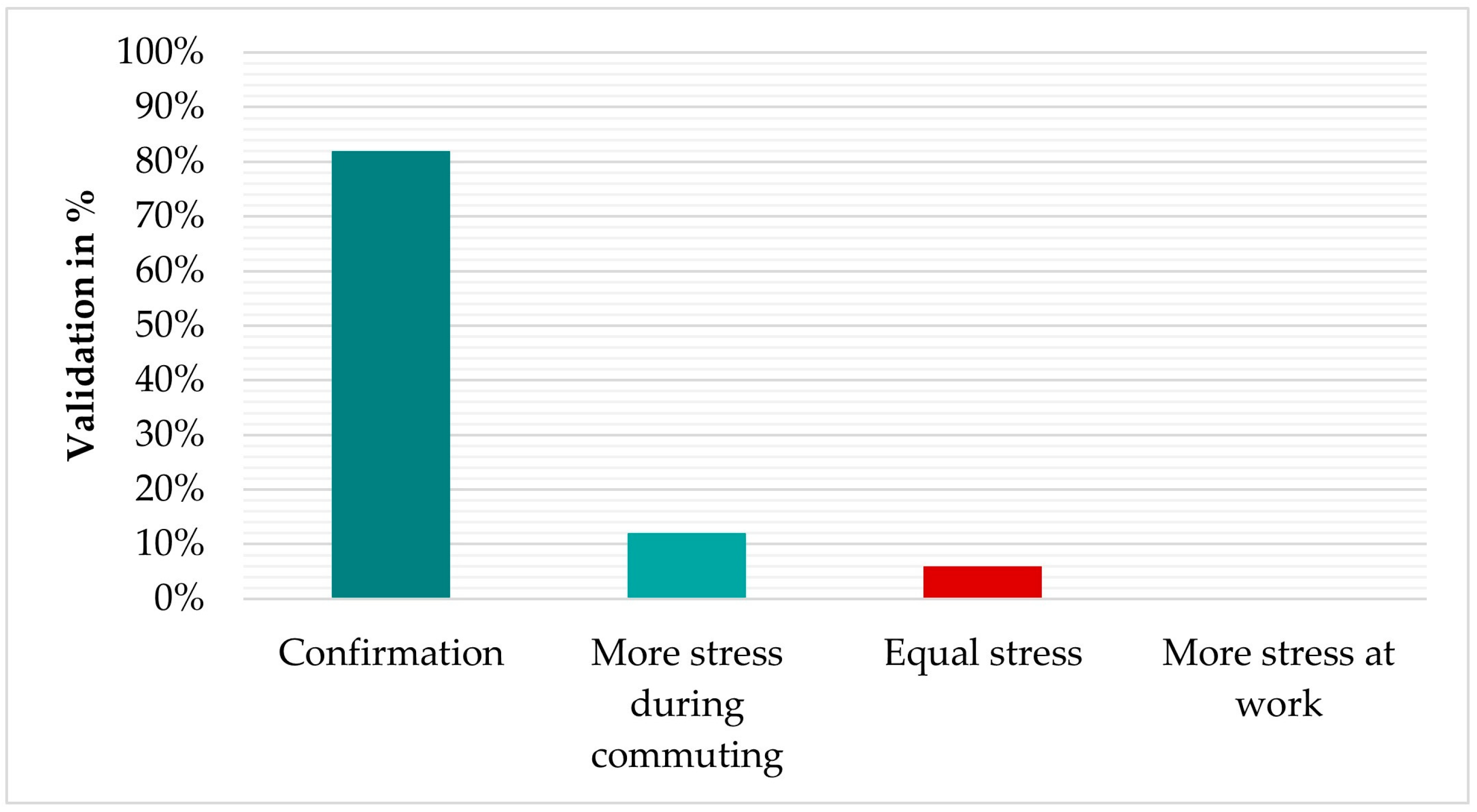
5.3. Urban Wellbeing
6. Discussion
6.1. Developing a Stress Detection Algorithm
6.2. Laboratory Versus Real-World Settings
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhang, B. Stress Recognition from Heterogeneous Data. Doctoral Dissertation, Université de Lorraine, Lorraine, France, 2018. [Google Scholar]
- Lee, M.; Yang, G.; Lee, H.-K.; Bang, S. Development Stress monitoring System based on Personal Digital Assistant (PDA). In Proceedings of the 26th Annual International Conference of the IEEE EMBS, San Francisco, CA, USA, 1–5 September 2004; pp. 2364–2367. [Google Scholar]
- Villarejo, M.V.; Zapirain, B.G.; Zorrilla, A.M. A stress sensor based on galvanic skin response (GSR) controlled by ZigBee. Sensors 2012, 12, 6075–6101. [Google Scholar] [CrossRef] [PubMed]
- Fink, G. Stress: Definition and history. Encycl. Neurosci. 2010, 9, 549–555. [Google Scholar]
- Begum, S.; Ahmed, M.; Funk, P.; Xiong, N. Intelligent Signal Analysis Using Case-Based Reasoning for Decision Support in Stress Management. In Computational Intelligence in Healthcare 4: Advanced Methodologies; Bichindaritz, I., Vaidya, S., Jain, A., Jain, L., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; pp. 158–188. [Google Scholar]
- Singh, S.A.; Gupta, P.K.; Rajeswari, M.; Janumala, T. Detection of Stress Using Biosensors. Mater. Today Proc. 2018, 5, 21003–21010. [Google Scholar] [CrossRef]
- Boucsein, W. Electrodermal Activity, 2nd ed.; Springer: Wuppertal, Germany, 2012. [Google Scholar]
- Seoane, F.; Mohino-Herranz, I.; Ferreira, J.; Alvarez, L.; Buendia, R.; Ayllón, D.; Llerena, C.; Gil-Pita, R. Wearable biomedical measurement systems for assessment of mental stress of combatants in real time. Sensors 2014, 14, 7120–7141. [Google Scholar] [CrossRef] [PubMed]
- Chrousos, G.P.; Loriaux, D.L.; Gold, P.W. Mechanisms of Physical and Emotional Stress; Springer Science & Business Media: New York, NY, USA, 1988; Volume 245. [Google Scholar]
- Cho, D.; Ham, J.; Oh, J.; Park, J.; Kim, S.; Lee, N.K.; Lee, B. Detection of stress levels from biosignals measured in virtual reality environments using a kernel-based extreme learning machine. Sensors 2017, 17, 2435. [Google Scholar] [CrossRef] [PubMed]
- Karthikeyan, P.; Murugappan, M.; Yaacob, S. Multiple physiological signal-based human stress identification using non-linear classifiers. Elektron. Ir Elektrotechnika 2013, 19, 80–85. [Google Scholar]
- Wilhelm, F.H.; Grossman, P. Emotions beyond the laboratory: Theoretical fundaments, study design, and analytic strategies for advanced ambulatory assessment. Biol. Psychol. 2010, 84, 552–569. [Google Scholar] [CrossRef] [PubMed]
- Zangróniz, R.; Martínez-Rodrigo, A.; Pastor, J.M.; López, M.T.; Fernández-Caballero, A. Electrodermal activity sensor for classification of calm/distress condition. Sensors 2017, 17, 2324. [Google Scholar] [CrossRef]
- Gjoreski, M.; Gjoreski, H.; Luštrek, M.; Gams, M. Continuous Stress Detection Using a Wrist Device—In Laboratory and Real Life ACM Classification Keywords. In Proceedings of the 2016 ACM International Joint Conference on Pervasive and Ubiquitous Computing Adjunct—UbiComp 16, Heidelberg, Germany, 12–16 September 2016; pp. 1185–1193. [Google Scholar]
- Hovsepian, K.; Al’Absi, M.; Ertin, E.; Kamarck, T.; Nakajima, M.; Kumar, S. cStress: Towards a gold standard for continuous stress assessment in the mobile environment. In Proceedings of the 2015 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Osaka, Japan, 7–11 September 2015; pp. 493–504. [Google Scholar]
- Plarre, K.; Raij, A.; Hossain, S. Continuous inference of psychological stress from sensory measurements collected in the natural environment. In Proceedings of the 10th International Conference on Information Processing in Sensor Networks (IPSN), Chicago, IL, USA, 12–14 April 2011; pp. 97–108. [Google Scholar]
- Uttley, J.; Simpson, J.; Qasem, H. Eye-Tracking in the Real World: Insights About the Urban Environment. In Handbook of Research on Perception-Driven Approaches to Urban Assessment and Design; IGI Global: Hershey, PA, USA, 2018; pp. 368–396. [Google Scholar]
- Christopoulos, G.I.; Uy, M.A.; Yap, W.J. The Body and the Brain: Measuring Skin Conductance Responses to Understand the Emotional Experience. Organ. Res. Methods 2016, 22, 1–27. [Google Scholar] [CrossRef]
- Fathullah, A.; Willis, K.S. Engaging the Senses: The Potential of Emotional Data as a new Information Layer in Urban Planning. Urban Sci. 2018, 2, 98. [Google Scholar] [CrossRef]
- Wolfensberger, W.; O’Connor, N. Relative Effectiveness of Galvanic Skin Response Latency, Amplitude and Duration Scores as Measures of Arousal and Habituation in Normal and Retarded Adults. Psychophysiology 1967, 3, 345–350. [Google Scholar] [CrossRef] [PubMed]
- Nepal, O.; Shrestha, S.; Timalsina, B.; Bade, M.; Jha, M.K. Detection of Sympathetic Activation by Skin Conductance for a Cognitive Load of Mental Subtraction Task in Medical Undergraduates. Int. J. Health Sci. Res. 2016, 6, 139–144. [Google Scholar]
- Hegazy, S.; Revett, K. Developing an Affective Working Companion Utilising GSR Data. In Proceedings of the 15th WSEAS International Conference on Computers; Corfu, Greece: 15–17 July 2011; pp. 256–261.
- Janssen, S.T. The Determinants of Reaction Times: Influence of Stimulus Intensity. Ph.D. Thesis, University of Waterloo, Waterloo, ON, Canada, 2015. [Google Scholar]
- Benedek, M.; Kaernbach, C. Decomposition of skin conductance data by means of nonnegative deconvolution. Psychophysiology 2010, 47, 647–658. [Google Scholar] [CrossRef]
- Picard, R.W.; Vyzas, E.; Healey, J. Toward machine emotional intelligence: Analysis of affective physiological state. IEEE Trans. Pattern Anal. Mach. Intell. 2001, 23, 1175–1191. [Google Scholar] [CrossRef]
- Levinson, D.; Edelberg, R. Scoring Criteria for Response Latency and Habituation in Electrodermal Research: A critique. Soc. Psychophysiol. Res. 1985, 22, 417–426. [Google Scholar] [CrossRef] [PubMed]
- Dawson, E.; Schell, M.; Filion, L. The electrodermal system. In Handbook of Psychophysiology; Cacioppo, T., Tassinary, G., Bernston, L., Eds.; Cambridge University Press: Cambridge, UK, 2000; pp. 200–223. [Google Scholar]
- Chattopadhyay, P.; Bond, A.; Lader, M. Characteristics of galvanic skin response in anxiety states. J. Psychiatr. Res. 1975, 12, 265–270. [Google Scholar] [CrossRef]
- Prokasy, W.F.; William, F.; Raskin, D.C. Electrodermal Activity in Psychological Research; Academic Press: New York, NY, USA, 1973. [Google Scholar]
- Ollander, S. Wearable Sensor Data Fusion for Human Stress Estimation. Ph.D. Thesis, Linköpings universitet tekniska Högskolan, Linköpings, Sweden, 2015. [Google Scholar]
- Caviedes, A.; Figliozzi, M. Modeling the impact of traffic conditions and bicycle facilities on cyclists’ on-road stress levels. Transp. Res. Part F Traffic Psychol. Behav. 2018, 58, 488–499. [Google Scholar] [CrossRef]
- Hernando-Gallego, F.; Artés-Rodríguez, A. Individual performance calibration using physiological stress signals. arXiv 2015, arXiv:1507.03482. [Google Scholar]
- Quazi, M.T.; Mukhopadhyay, S.C.; Suryadevara, N.K.; Huang, Y.M. Towards the smart sensors based human emotion recognition. In Proceedings of the 2012 IEEE International Instrumentation and Measurement Technology Conference Proceedings, Graz, Austria, 13–16 May 2012; pp. 2365–2370. [Google Scholar]
- Vinkers, C.H.; Penning, R.; Hellhammer, J.; Verster, J.C.; Klaessens, J.H.G.M.; Olivier, B.; Kalkman, C.J. The effect of stress on core and peripheral body temperature in humans. Stress 2013, 16, 520–530. [Google Scholar] [CrossRef]
- Alberdi, A.; Aztiria, A.; Basarab, A. Towards an automatic early stress recognition system for office environments based on multimodal measurements: A review. J. Biomed. Inform. 2016, 59, 49–75. [Google Scholar] [CrossRef]
- Kaklauskas, A. Web-based biometric computer mouse advisory system to analyze a user’s emotions and work productivity. Intell. Syst. Ref. Libr. 2015, 81, 137–173. [Google Scholar]
- Asai, K. The Role of Head-Up Display in Computer-Assisted Instruction. In Human Computer Interaction: New Developments; Asai, K., Ed.; IntechOpen: Rijeka, Croatia, 2008; pp. 31–48. Available online: https://www.intechopen.com/books/human_computer_interaction_new_developments/the_role_of_head-up_display_in_computer-assisted_instruction (accessed on 2 September 2019).
- Hui, T.K.L.; Sherratt, R.S. Coverage of emotion recognition for common wearable biosensors. Biosensors 2018, 8, 30. [Google Scholar] [CrossRef]
- Malik, M. Heart rate variability: Standards of measurement, physiological interpretation, and clinical use. Task Force of the European Society of Cardiology and The North American Society of Pacing and Electrophysiology. Eur. Heart J. 1996, 17, 354–381. [Google Scholar] [CrossRef]
- Sriramprakash, S.; Prasanna, V.D.; Murthy, O.V.R. Stress Detection in Working People. Procedia Comput. Sci. 2017, 115, 359–366. [Google Scholar] [CrossRef]
- Shaffer, F.; Ginsberg, J.P. An Overview of Heart Rate Variability Metrics and Norms. Front. Public Health 2017, 5, 1–17. [Google Scholar] [CrossRef] [PubMed]
- Westerink, J.H.D.M.; van den Broek, E.; Schut, M.; van Herk, J.; Tuinenbreijer, K. Computing Emotion Awareness Through Galvanic Skin Response and Facial Electromyography. In Probing Experience Philips Research; Westerink, J.H.D.M., Ouwerkerk, M., Overbeek, T.J.M., Pasveer, W.F., de Ruyter, B., Eds.; Springer: Dordrecht, The Netherlands, 2008; Volume 8. [Google Scholar]
- Jimenez-Molina, A.; Retamal, C.; Lira, H. Using psychophysiological sensors to assess mental workload during web browsing. Sensors 2018, 18, 458. [Google Scholar] [CrossRef]
- Setz, C.; Arnrich, B.; Schumm, J.; La Marca, R.; Tröster, G.; Ehlert, U. Discriminating stress from cognitive load using a wearable eda device. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 410–417. [Google Scholar] [CrossRef]
- Zhai, J.; Barreto, A. Stress Recognition Using Non-invasive Technology. In Proceedings of the 19th International Florida Artificial Intelligence Research Society Conference (FLAIRS), Melbourne Beach, FL, USA, 11–13 May 2006; pp. 395–400. [Google Scholar]
- Hosseini, S.A.; Khalilzadeh, M.A. Emotional stress recognition system using EEG and psychophysiological signals: Using new labelling process of EEG signals in emotional stress state. In Proceedings of the 2010 International Conference on Biomedical Engineering and Computer Science (ICBECS), Wuhan, China, 23–25 April 2010; pp. 1–6. [Google Scholar]
- Wijsman, J.; Grundlehner, B.; Liu, H.; Penders, J.; Hermens, H. Wearable physiological sensors reflect mental stress state in office-like situations. In Proceedings of the 2013 Humaine Association Conference on Affective Computing and Intelligent Interaction (ACII), Geneva, Switzerland, 2–5 September 2013; pp. 600–605. [Google Scholar]
- Sharma, N.; Gedeon, T. Hybrid Genetic Algorithms for Stress Recognition in Reading. In Evolutionary Computation, Machine Learning and Data Mining in Bioinformatics; Vanneschi, L., Bush, W., Giacobini, M., Eds.; Springer: Vienna, Austria, 2013. [Google Scholar]
- Healey, J.A.; Picard, R.W. Detecting Stress During Real-World Dring Tasks Using Physiological Sensors. IEEE Trans. Intell. Transp. Syst. 2005, 6, 156–166. [Google Scholar] [CrossRef]
- De Santos Sierra, A.; Ávila, C.S.; Del Pozo, G.B.; Casanova, J.G. Stress detection by means of stress physiological template. In Proceedings of the 2011 Third World Congress on Nature and Biologically Inspired Computing, Salamanca, Spain, 19–21 October 2011; pp. 131–136. [Google Scholar]
- Keshan, N.; Parimi, P.V.; Bichindaritz, I. Machine learning for stress detection from ECG signals in automobile drivers. In Proceedings of the Machine Learning for Stress Detection from ECG Signals in Automobile Drivers, Santa Clara, CA, USA, 29 October–1 November 2015; pp. 2661–2669. [Google Scholar]
- Jun, G.; Smitha, K.G. EEG based stress level identification. In Proceedings of the 2016 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Budapest, Hungary, 9–12 October 2016; pp. 3270–3274. [Google Scholar]
- Liao, W.; Zhang, W.; Zhu, Z.; Ji, Q. A Real-Time Human Stress Monitoring System Using Dynamic Bayesian Network. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05)—Workshops, San Diego, CA, USA, 21–23 September 2005; Volume 3, p. 70. [Google Scholar]
- Katsis, C.D.; Ganiatsas, G.; Fotiadis, D.I. An integrated telemedicine platform for the assessment of affective physiological states. Diagn. Pathol. 2006, 1, 1–9. [Google Scholar] [CrossRef]
- Kolodyazhniy, V.; Kreibig, S.D.; Gross, J.J.; Roth, W.T.; Wilhelm, F.H. An affective computing approach to physiological emotion specificity: Toward subject-independent and stimulus-independent classification of film-induced emotions. Psychophysiology 2011, 48, 908–922. [Google Scholar] [CrossRef] [PubMed]
- Kreibig, S.D.; Wilhelm, F.H.; Roth, W.T.; Gross, J.J. Cardiovascular, electrodermal, and respiratory response patterns to fear- and sadness-inducing films. Psychophysiology 2007, 44, 787–806. [Google Scholar] [CrossRef]
- Sagl, G.; Resch, B.; Blaschke, T. Contextual sensing: Integrating contextual information with human and technical geo-sensor information for smart cities. Sensors 2015, 15, 17013–17035. [Google Scholar] [CrossRef] [PubMed]
- Birenboim, A.; Dijst, M.; Scheepers, F.; Poelman, M.; Helbich, M. Wearables and location tracking technologies for mental-state sensing in outdoor environments. Prof. Geogr. 2019, 71, 1–13. [Google Scholar] [CrossRef]
- Bergner, B.; Exner, J.; Memmel, M.; Raslan, R.; Taha, D.; Talal, M.; Zeile, P. Human Sensory Assessment Methods in Urban Planning—A Case Study in Alexandria. In Proceedings of the REAL CORP 2013 International Conference on Urban Planning, Regional Development and Information Society (REAL CORP-13), Planning Times, Rome, Italy, 29–23 May 2013; pp. 407–417. [Google Scholar]
- Can, Y.S.; Chalabianloo, N.; Ekiz, D.; Ersoy, C. Continuous Stress Detection Using Wearable Sensors in Real Life: Algorithmic Programming Contest Case Study. Sensors 2019, 19, 1849. [Google Scholar] [CrossRef]
- Wyatt, J.C.; Liu, J.L.Y. Basic concepts in medical informatics. J. Epidemiol. Community Health 2002, 56, 808–812. [Google Scholar] [CrossRef] [PubMed]
- Guo, R.; Li, S.; He, L.; Gao, W.; Qi, H.; Owens, G. Pervasive and Unobtrusive Emotion Sensing for Human Mental Health. In Proceedings of the ICTs for Improving Patients Rehabilitation Research Techniques, Venice, Italy, 5–8 May 2013. [Google Scholar]
- Schmidt, P.; Reiss, A.; Duerichen, R.; Van Laerhoven, K. Wearable affect and stress recognition: A review. arXiv 2018, arXiv:1811.08854. [Google Scholar]
- Empatica E4 Wristband. Available online: https://www.empatica.com/en-eu/research/e4/ (accessed on 25 March 2019).
- Zeile, P.; Resch, B.; Loidl, M.; Petutschnig, A.; Dörrzapf, L. Urban Emotions and Cycling Experience—Enriching Traffic Planning for Cyclists with Human Sensor Data. In Proceedings of the GI_Forum, Salzburg, Austria, 5–8 July 2016; pp. 204–216. [Google Scholar]
- Schumm, J.; Bächlin, M.; Setz, C.; Arnrich, B.; Roggen, D.; Tröster, G. Effect of movements on the electrodermal response after a startle event. Methods Inf. Med. 2008, 47, 186–191. [Google Scholar]
- Schmidt, S.; Walach, H. Electrodermal activity (EDA): State-of-the-art measurement and techniques for parapsychological purposes. J. Parapsychol. 2000, 64, 139–163. [Google Scholar]
- Chênes, C.; Chanel, G.; Soleymani, M.; Pun, T. Highlight Detection in Movie Scenes Through Inter-users, Physiological Linkage. In Social Media Retrieval; Ramzan, N., van Zwol, R., Lee, J.-S., Clüver, K., Hua, X.-S., Eds.; Springer: London, UK, 2013. [Google Scholar]
- Shusterman, V.; Anderson, K.P.; Barnea, O. Spontaneous skin temperature oscillations in normal human subjects. Am. J. Physiol-Regul. Integr. Comp. Physiol. 2017, 273, R1173–R1181. [Google Scholar] [CrossRef]
- Abraham, A. Rule-based Expert Systems. In Handbook for Measurement Systems Design; Sydenham, P., Thorn, R., Eds.; John Wiley and Sons Ltd.: London, UK, 2005; pp. 909–919. [Google Scholar]
- Lengyel, L. Validating rule-based algorithms. Acta Polytech. Hung. 2015, 12, 59–75. [Google Scholar]
- Kou, G.; Ergu, D.; Chen, Y.; Lin, C. Pairwise Comparison Matrix in Multiple Criteria Decision Making. Technol. Econ. Dev. Econ. 2016, 22, 738–765. [Google Scholar] [CrossRef]
- Carreiro, L.R.R.; Haddad, H.; Baldo, M.V.C. Effects of intensity and positional predictability of a visual stimulus on simple reaction time. Neurosci. Lett. 2011, 487, 345–349. [Google Scholar] [CrossRef] [PubMed]
- Wilhelm, F.H.; Rattel, J.A.; Wegerer, M.; Liedlgruber, M.; Schweighofer, S.; Kreibig, S.D.; Kolodyazhniy, V.; Blechert, J. Attend or defend? Sex differences in behavioral, autonomic, and respiratory response patterns to emotion–eliciting films. Biol. Psychol. 2017, 130, 30–40. [Google Scholar] [CrossRef] [PubMed]
- Jain, A.; Bansal, R.; Kumar, A.; Singh, K. A comparative study of visual and auditory reaction times on the basis of gender and physical activity levels of medical first year students. Int. J. Appl. Basic Med Res. 2015, 5, 124. [Google Scholar] [CrossRef] [PubMed]
- Kyriakou, K.; Resch, B. Spatial Analysis of Moments of Stress Derived from Wearable Sensor Data. In Proceedings of the 15th Conference on Location Based Services, Vienna, Austria, 11–13 November 2019. under review. [Google Scholar]
- Tobler, W.R. A Computer Movie Simulating Urban Growth in the Detroit Region. Econ. Geogr. 1970, 46, 234. [Google Scholar] [CrossRef]
- Getis, A.; Ord, J.K. The Analysis of Spatial Association by Use of Distance Statistics. Geogr. Anal. 1992, 24, 189–206. [Google Scholar] [CrossRef]
- Ord, J.K.; Getis, A. Local Spatial Autocorrelation Statistics: Distributional Issues and an Application. Geogr. Anal. 1995, 27, 286–306. [Google Scholar] [CrossRef]
- Thompson, R.F.; Spencer, W.A. Habituation: A model phenomenon for the study of neuronal substrates of behavior. Psychol. Rev. 1966, 73, 16–43. [Google Scholar] [CrossRef]
- Doerrzapf, L.; Kovács-Gyori, A.; Resch, B.; Zeile, P. Defining and Assessing Walkability: An Integrated Approach Using Surveys, Biosensors and Geospatial Analysis. Urban Dev. Issues 2019, 62, 5–15. [Google Scholar] [CrossRef]
- Acerbi, G.; Rovini, E.; Betti, S.; Tirri, A.; Rónai, J.F.; Sirianni, A.; Agrimi, J.; Eusebi, L.; Cavallo, F. A wearable system for stress detection through physiological data analysis. Lect. Notes Electr. Eng. 2017, 426, 31–50. [Google Scholar]
- Bigliassi, M.; Karageorghis, C.I.; Wright, M.J.; Orgs, G.; Nowicky, A.V. Effects of auditory stimuli on electrical activity in the brain during cycle ergometry. Physiol. Behav. 2017, 177, 135–147. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Tang, H.; Chen, D.; Zhang, Q. DeStress: Mobile and remote stress monitoring, alleviation, and management platform. In Proceedings of the 2012 IEEE Global Communications Conference (GLOBECOM), Anaheim, CA, USA, 3–7 December 2019; pp. 2036–2041. [Google Scholar]
- Gjoreski, M.; Gjoreski, H.; Lutrek, M.; Gams, M. Automatic Detection of Perceived Stress in Campus Students Using Smartphones. In Proceedings of the 2015 International Conference on Intelligent Environments, Prague, Czech Republic, 15–17 July 2015; pp. 132–135. [Google Scholar]
- Kounadi, O.; Resch, B. A Geoprivacy by Design Guideline for Research Campaigns That Use Participatory Sensing Data. J. Empir. Res. Hum. Res. Ethics 2018, 13, 203–222. [Google Scholar] [CrossRef] [PubMed]
- Van den Berg, A.E.; Hartig, T.; Staats, H. Preference for nature in urbanized societies: Stress, restoration, and the pursuit of sustainability. J. Soc. Issues 2007, 63, 79–96. [Google Scholar] [CrossRef]
- Rishi, P.; Khuntia, G. Urban Environmental Stress and Behavioral Adaptation in Bhopal City of India. Urban Stud. Res. 2012, 2012, 1–9. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Studies | Physiological Signals | Other | Method | Settings | Stressor | Confirmed Stressors | Accuracy |
|---|---|---|---|---|---|---|---|
| Stress Detection | |||||||
| Setz et al. (2010) | GSR | SVM | Lab | Social-evaluation of arithmetic problems to be solved under time pressure | No | 82.8% | |
| Zhai and Barreto (2006) | GSR, ST, ECG, BVP | Pupil dilation | SVM | Lab | Stroop Test | No | 90.1% |
| Hosseini and Khalilzadeh (2010) | GSR, BVP, RESP, EEG | SVM | Lab | IAPS pictures | No | 82.7% | |
| Wijsman et al. (2013) | GSR, ECG, EMG, RESP | General Estimating Equations | Lab | Auditory | Yes | 74.5% | |
| Lee et al. (2004) | GSR, ST, ECG | Introduced algorithm combining MLP, GRNN and ANFIS | Lab | Stroop test and auditory stimuli | No | 96.7% | |
| Sharma and Gedeon (2013) | GSR, ECG, BVP | Pupil dilation, eye gaze | ANN with SVM | Lab | Read stressed and non-stressed types of texts | Yes | 89% |
| Stress Detection and Associated Level | |||||||
| Healey and Picard (2005) | GSR, ECG, EMG, RESP | Feature-based algorithm | RW | Driving task | Yes | 97% | |
| de Santos Sierra et al. (2011) | ECG | Fuzzy logic | Lab | Hyperventilation and Talk Preparation | No | 99.5% | |
| Cho et al. (2017) | GSR | Kernel-based Extreme learning machine algorithms | Lab | Arithmetic subtractions in configurable Virtual Reality | No | 95% | |
| Keshan, Parimi, and Bichindaritz (2015) | EEG | Random Tree | - | - | No | 88.2% | |
| Zhang (2018) | GSR, ECG, EMG | Reaction time | SVM | Lab | Stroop test and auditory stimuli | No | 88.5% |
| Jun and Smitha (2016) | EEG | SVM | Lab | Stroop test and mental arithmetic test | No | 75% | |
| Liao et al. (2005) | GSR, ST, ECG | Finger pressure, visual features | Bayesian Network | Lab | Tasks on the computer | No | 92% |
| Emotional States Classification | |||||||
| Picard et al. (2001) | GSR, EMG, BVP, RESP | Feature-based algorithm | Lab | Clynes protocol | No | 81% | |
| Katsis, Ganiatsas, and Fotiadis (2006) | GSR, EMG, RESP | SVM | Lab | Simulated race conditions | No | 86% | |
| Kolodyazhniy, Kreibig, Gross, Roth and Wilhelm (2011) | GSR, ECG, EMG, ST | Capnography, Piezo-electric sensor, plethysmography | KNN | Lab | Films | Yes | 84.5% |
| Kreibig, Wilhelm, Roth and Gross | GSR, ECG, EMG, RESP | T-wave amplitude, Systolic and diastolic arterial pressure, HRV, Pulse wave amplitude at the ear | Pattern classification analysis | Lab | Films | Yes | 85% |
| Rule | Phys. Signal | Feature | Condition for Scoring Value: 1 | Condition for Scoring Value: 0.5 | Condition for Scoring Value: 0 |
|---|---|---|---|---|---|
| R1 | GSR | Increase | [gt:gt+n]′ > 0 where 2 ≤ n ≤ 5 | [gt:gt+n]′ > 0 where 5 < n ≤ 8 | [gt:gt+n]′ > 0 where n < 2 and n > 8 |
| R2 | ST | Decrease | [Tt+3:Tt+m]′ < 0 where m > 3 | [Tt+2:Tt+m]′ < 0 where 5 ≤ m ≤ 6 | [Tt+3:Tt+m]′ < 0 where m < 3 |
| R3 | GSR | Rising time (RT) | |||
| R4 | GSR | Response slope (RS) | ≥ 10° | ≥ 8° | < 8° |
| R5 | - | Δt between MOSi and MOSi + 1 | − 10 s | - | − > 10 s |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kyriakou, K.; Resch, B.; Sagl, G.; Petutschnig, A.; Werner, C.; Niederseer, D.; Liedlgruber, M.; Wilhelm, F.H.; Osborne, T.; Pykett, J. Detecting Moments of Stress from Measurements of Wearable Physiological Sensors. Sensors 2019, 19, 3805. https://doi.org/10.3390/s19173805
Kyriakou K, Resch B, Sagl G, Petutschnig A, Werner C, Niederseer D, Liedlgruber M, Wilhelm FH, Osborne T, Pykett J. Detecting Moments of Stress from Measurements of Wearable Physiological Sensors. Sensors. 2019; 19(17):3805. https://doi.org/10.3390/s19173805
Chicago/Turabian StyleKyriakou, Kalliopi, Bernd Resch, Günther Sagl, Andreas Petutschnig, Christian Werner, David Niederseer, Michael Liedlgruber, Frank H. Wilhelm, Tess Osborne, and Jessica Pykett. 2019. "Detecting Moments of Stress from Measurements of Wearable Physiological Sensors" Sensors 19, no. 17: 3805. https://doi.org/10.3390/s19173805
APA StyleKyriakou, K., Resch, B., Sagl, G., Petutschnig, A., Werner, C., Niederseer, D., Liedlgruber, M., Wilhelm, F. H., Osborne, T., & Pykett, J. (2019). Detecting Moments of Stress from Measurements of Wearable Physiological Sensors. Sensors, 19(17), 3805. https://doi.org/10.3390/s19173805