Low-Cost Open Source Ultrasound-Sensing Based Navigational Support for the Visually Impaired



Abstract
1. Introduction
2. Materials and Methods
2.1. Design
2.2. Bill of Materials
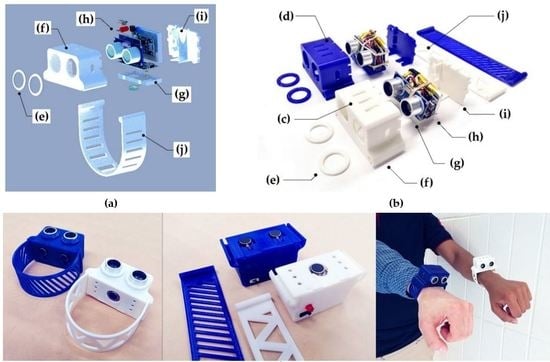
2.3. Assembly
2.4. Operational Principles
2.5. Testing of the Device
- (a)
- Walk along the corridor with an unknown obstacle
- (b)
- Bypass several corners indoors
- (c)
- Navigate a staircase
- (d)
- Wall following
- (e)
- Detect the open door
- (f)
- Detect an obstacle (shrub plant/road sign) outdoors
- (g)
- Bypass an obstacle outdoors
- (h)
- Avoid collisions with pedestrians
- (i)
- Interact with known objects (bin/cardboard boxes)
3. Results and Discussion
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- World Health Organization. Blindness and Vision Impairment. Available online: https://www.who.int/news-room/fact-sheets/detail/blindness-and-visual-impairment (accessed on 5 July 2019).
- Bourne, R.R.A.; Flaxman, S.R.; Braithwaite, T.; Cicinelli, M.V.; Das, A.; Jonas, J.B.; Keeffe, J.; Kempen, J.H.; Leasher, J.; Limburg, H.; et al. Magnitude, temporal trends, and projections of the global prevalence of blindness and distance and near vision impairment: A systematic review and meta-analysis. Lancet Glob. Health 2017, 5, e888–e897. [Google Scholar] [CrossRef]
- Velázquez, R. Wearable assistive devices for the blind. In Wearable and Autonomous Biomedical Devices and Systems for Smart Environment; Lecture Notes in Electrical Engineering; Springer: Berlin/Heidelberg, Germany, 2010; Volume 75, pp. 331–349. [Google Scholar]
- Population Reference Bureau. Fact Sheet: Aging in the United States. Available online: https://www.prb.org/aging-unitedstates-fact-sheet/ (accessed on 5 July 2019).
- Economic Policy Institute. Financial Security of Elderly Americans at Risk. Available online: https://www.epi.org/publication/economic-security-elderly-americans-risk/ (accessed on 5 July 2019).
- American Foundation for the Blind. Available online: http://www.afb.org (accessed on 5 July 2019).
- National Federation of the Blind. Available online: https://www.nfb.org/resources/blindness-statistics (accessed on 5 July 2019).
- Quinones, P.A.; Greene, T.; Yang, R.; Newman, M.W. Supporting visually impaired navigation: A needs-finding study. In Proceedings of the CHI’11 Extended Abstracts on Human Factors in Computing Systems, Vancouver, BC, Canada, 7–12 May 2011; pp. 1645–1650. [Google Scholar] [CrossRef]
- Gold, D.; Simson, H. Identifying the needs of people in Canada who are blind or visually impaired: Preliminary results of a nation-wide study. In International Congress Series; Elsevier: London, UK, 2015; Volume 1282, pp. 139–142. [Google Scholar]
- Christy, B.; Nirmalan, P.K. Acceptance of the long Cane by persons who are blind in South India. JVIB 2006, 100, 115–119. [Google Scholar] [CrossRef]
- Perkins School for the Blind. 10 Fascinating Facts about the White Cane. Available online: https://www.perkins.org/stories/10-fascinating-facts-about-the-white-cane (accessed on 29 July 2019).
- Pereira, A.; Nunes, N.; Vieira, D.; Costa, N.; Fernandes, H.; Barroso, J. Blind Guide: An Ultrasound Sensor-based Body Area Network for Guiding Blind People. Procedia Comput. Sci. 2015, 67, 403–408. [Google Scholar] [CrossRef]
- Kolarik, A.J.; Cirstea, S.; Pardhan, S.; Moore, B.C.J. A summary of research investigating echolocation abilities of blind and sighted humans. Hear. Res. 2014, 310, 60–68. [Google Scholar] [CrossRef] [PubMed]
- Rosenblum, L.D.; Gordon, M.S.; Jarquin, L. Echolocating distance by moving and stationary listeners. Ecol. Psychol. 2000, 12, 181–206. [Google Scholar] [CrossRef]
- Maidenbaum, S.; Hanassy, S.; Abboud, S.; Buchs, G.; Chebat, D.-R.; Levy-Tzedek, S.; Amedi, A. The “EyeCane”, a new electronic travel aid for the blind: Technology, behavior & swift learning. Restor. Neurol. Neurosci. 2014, 32, 813–824. [Google Scholar] [CrossRef] [PubMed]
- UltraCane. Available online: https://www.ultracane.com/ultracanecat/ultracane (accessed on 5 July 2019).
- Independent Living Aids: Miniguide Mobility Aid. Available online: https://www.independentliving.com/product/Miniguide-Mobility-Aid/mobility-aids (accessed on 5 July 2019).
- LS&S 541035 Sunu Band Mobility Guide and Smart Watch. Available online: https://www.devinemedical.com/541035-Sunu-Band-Mobility-Guide-and-Smart-Watch-p/lss-541035.htm (accessed on 5 July 2019).
- Independent Living Aids: BuzzClip Mobility Guide. Available online: https://www.independentliving.com/product/BuzzClip-Mobility-Guide-2nd-Generation/mobility-aids (accessed on 5 July 2019).
- Independent Living Aids: iGlasses Ultrasonic Mobility Aid. Available online: https://www.independentliving.com/product/iGlasses-Ultrasonic-Mobility-Aid-Clear-Lens/mobility-aids (accessed on 5 July 2019).
- Caretec: Ray—The Handy Mobility Aid. Available online: http://www.caretec.at/Mobility.148.0.html?&cHash=a82f48fd87&detail=3131 (accessed on 5 July 2019).
- Khan, I.; Khusro, S.; Ullah, I. Technology-assisted white cane, evaluation and future directions. PeerJ 2018, 6, e6058. [Google Scholar] [CrossRef]
- SmartCane Device. Available online: http://smartcane.saksham.org/overview (accessed on 29 July 2019).
- Elmannai, W.; Elleithy, K. Sensor-Based Assistive Devices for Visually-Impaired People: Current Status, Challenges, and Future Directions. Sensors 2017, 17, 565. [Google Scholar] [CrossRef]
- Wahab, M.H.A.; Talib, A.A.; Kadir, H.A.; Johari, A.; Noraziah, A.; Sidek, R.M.; Mutalib, A.A. Smart Cane: Assistive Cane for Visually-impaired People. arXiv 2018, arXiv:1110.5156. [Google Scholar]
- García, A.R.; Fonseca, R.; Durán, A. Electronic long cane for locomotion improving on visual impaired people: A case study. In Proceedings of the 2011 Pan American Health Care Exchanges (PAHCE), Rio de Janeiro, Brazil, 28 March–1 April 2011. [Google Scholar] [CrossRef]
- Kumar, K.; Champaty, B.; Uvanesh, K.; Chachan, R.; Pal, K.; Anis, A. Development of an ultrasonic cane as a navigation aid for the blind people. In Proceedings of the 2014 International Conference on Control, Instrumentation, Communication and Computational Technologies (ICCICCT), Kanyakumari District, India, 10–11 July 2014. [Google Scholar] [CrossRef]
- Amedi, A.; Hanassy, S. Infra Red Based Devices for Guiding Blind and Visually Impaired Persons. WO Patent 2012/090114 Al, 19 December 2011. [Google Scholar]
- Bharambe, S.; Thakker, R.; Patil, H.; Bhurchandi, K.M. Substitute Eyes for Blind with Navigator Using Android. In Proceedings of the India Educators Conference (TIIEC), Bangalore, India, 4–6 April 2013; pp. 38–43. [Google Scholar] [CrossRef]
- Yi, Y.; Dong, L. A design of blind-guide crutch based on multi-sensors. In Proceedings of the 2015 12th International Conference on Fuzzy Systems and Knowledge Discovery (FSKD), Zhangjiajie, China, 15–17 August 2015. [Google Scholar] [CrossRef]
- Aymaz, Ş.; Çavdar, T. Ultrasonic Assistive Headset for visually impaired people. In Proceedings of the 2016 39th International Conference on Telecommunications and Signal Processing (TSP), Vienna, Austria, 27–29 June 2016. [Google Scholar] [CrossRef]
- Agarwal, R.; Ladha, N.; Agarwal, M.; Majee, K.K.; Das, A.; Kumar, S.A.; Rai, S.K.; Singh, A.K.; Nayak, S.; Dey, S.; et al. Low cost ultrasonic smart glasses for blind. In Proceedings of the 2017 8th IEEE Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 3–5 October 2017; pp. 210–213. [Google Scholar] [CrossRef]
- De Alwis, D.; Samarawickrama, Y.C. Low Cost Ultrasonic Based Wide Detection Range Smart Walking Stick for Visually Impaired. Int. J. Multidiscip. Stud. 2016, 3, 123–130. [Google Scholar] [CrossRef]
- Landa-Hernández, A.; Bayro-Corrochano, E. Cognitive guidance system for the blind. In Proceedings of the IEEE World Automation Congress (WAC), Puerto Vallarta, Mexico, 24–28 June 2012. [Google Scholar]
- Fradinho Oliveira, J. The path force feedback belt. In Proceedings of the 2013 8th International Conference on Information Technology in Asia (CITA), Kuching, Malaysia, 1–4 July 2013. [Google Scholar] [CrossRef]
- Saputra, M.R.U.; Widyawan; Santosa, P.I. Obstacle Avoidance for Visually Impaired Using Auto-Adaptive Thresholding on Kinect’s Depth Image. In Proceedings of the IEEE 14th International Conference on Scalable Computing and Communications and Its Associated Workshops (UTC-ATC-ScalCom), Bali, Indonesia, 9–12 December 2014. [Google Scholar] [CrossRef]
- Aladrén, A.; López-Nicolás, G.; Puig, L.; Guerrero, J.J. Navigation Assistance for the Visually Impaired Using RGB-D Sensor with Range Expansion. IEEE Syst. J. 2016, 10, 922–932. [Google Scholar] [CrossRef]
- Mocanu, B.; Tapu, R.; Zaharia, T. When Ultrasonic Sensors and Computer Vision Join Forces for Efficient Obstacle Detection and Recognition. Sensors 2016, 16, 1807. [Google Scholar] [CrossRef] [PubMed]
- Prudhvi, B.R.; Bagani, R. Silicon eyes: GPS-GSM based navigation assistant for visually impaired using capacitive touch braille keypad and smart SMS facility. In Proceedings of the 2013 World Congress on Computer and Information Technology (WCCIT), Sousse, Tunisia, 22–24 June 2013. [Google Scholar] [CrossRef]
- Tudor, D.; Dobrescu, L.; Dobrescu, D. Ultrasonic electronic system for blind people navigation. In Proceedings of the E-Health and Bioengineering Conference (EHB), Iasi, Romania, 19–21 November 2015. [Google Scholar] [CrossRef]
- Gibb, A. Building Open Source Hardware: DIY Manufacturing for Hackers and Makers; Pearson Education: Crawfordsville, IN, USA, 2014; ISBN 978-0-321-90604-5. [Google Scholar]
- da Costa, E.T.; Mora, M.F.; Willis, P.A.; do Lago, C.L.; Jiao, H.; Garcia, C.D. Getting started with open-hardware: Development and control of microfluidic devices. Electrophoresis 2014, 35, 2370–2377. [Google Scholar] [CrossRef] [PubMed]
- Ackerman, J.R. Toward Open Source Hardware. Univ. Dayton Law Rev. 2008, 34, 183–222. [Google Scholar]
- Blikstein, P. Digital fabrication and ‘making’ in education: The democratization of invention. In FabLabs: Of Machines, Makers and Inventors; Büching, C., Walter-Herrmann, J., Eds.; Transcript-Verlag: Bielefeld, Germany, 2013; Volume 4, pp. 1–21. [Google Scholar]
- Gershenfeld, N. How to Make Almost Anything: The Digital Fabrication Revolution. Foreign Aff. 2012, 91, 42–57. [Google Scholar]
- Sells, E.; Bailard, S.; Smith, Z.; Bowyer, A.; Olliver, V. RepRap: The Replicating Rapid—Maximizing Customizability by Breeding the Means of Production. In Proceedings of the World Conference on Mass Customization and Personalization, Cambridge, MA, USA, 7–9 October 2007. [Google Scholar] [CrossRef]
- Jones, R.; Haufe, P.; Sells, E.; Iravani, P.; Olliver, V.; Palmer, C.; Bowyer, A. RepRap—The Replicating Rapid Prototyper. Robotica 2011, 29, 177–191. [Google Scholar] [CrossRef]
- Bowyer, A. 3D Printing and Humanity’s First Imperfect Replicator. 3D Print. Addit. Manuf. 2014, 1, 4–5. [Google Scholar] [CrossRef]
- Rundle, G. A Revolution in the Making; Simon and Schuster: New York, NY, USA, 2014; ISBN 978-1-922213-48-8. [Google Scholar]
- Kietzmann, J.; Pitt, L.; Berthon, P. Disruptions, decisions, and destinations: Enter the age of 3-D printing and additive manufacturing. Bus. Horiz. 2015, 58, 209–215. [Google Scholar] [CrossRef]
- Lipson, H.; Kurman, M. Fabricated: The New World of 3D Printing; John Wiley & Sons: Hoboken, NJ, USA, 2013; ISBN 978-1-118-41694-5. [Google Scholar]
- Attaran, M. The rise of 3-D printing: The advantages of additive manufacturing over traditional manufacturing. Bus. Horiz. 2017, 60, 677–688. [Google Scholar] [CrossRef]
- Pearce, J.M. Building Research Equipment with Free, Open-Source Hardware. Science 2012, 337, 1303–1304. [Google Scholar] [CrossRef]
- Pearce, J. Open-Source Lab: How to Build Your Own Hardware and Reduce Research Costs, 1st ed.; Elsevier: Amsterdam, The Netherlands, 2013; ISBN 978-0-12-410462-4. [Google Scholar]
- Baden, T.; Chagas, A.M.; Gage, G.; Marzullo, T.; Prieto-Godino, L.L.; Euler, T. Open Labware: 3-D Printing Your Own Lab Equipment. PLoS Biol. 2015, 13, e1002086. [Google Scholar] [CrossRef] [PubMed]
- Coakley, M.; Hurt, D.E. 3D Printing in the Laboratory: Maximize Time and Funds with Customized and Open-Source Labware. J. Lab. Autom. 2016, 21, 489–495. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.; Wijnen, B.; Pearce, J.M. Open-Source 3-D Platform for Low-Cost Scientific Instrument Ecosystem. J. Lab. Autom. 2016, 21, 517–525. [Google Scholar] [CrossRef] [PubMed]
- Wittbrodt, B.; Laureto, J.; Tymrak, B.; Pearce, J. Distributed Manufacturing with 3-D Printing: A Case Study of Recreational Vehicle Solar Photovoltaic Mounting Systems. J. Frugal Innov. 2015, 1. [Google Scholar] [CrossRef]
- Gwamuri, J.; Wittbrodt, B.; Anzalone, N.; Pearce, J. Reversing the Trend of Large Scale and Centralization in Manufacturing: The Case of Distributed Manufacturing of Customizable 3-D-Printable Self-Adjustable Glasses. Chall. Sustain. 2014, 2, 30–40. [Google Scholar] [CrossRef]
- Petersen, E.E.; Pearce, J. Emergence of Home Manufacturing in the Developed World: Return on Investment for Open-Source 3-D Printers. Technologies 2017, 5, 7. [Google Scholar] [CrossRef]
- Petersen, E.E.; Kidd, R.W.; Pearce, J.M. Impact of DIY Home Manufacturing with 3D Printing on the Toy and Game Market. Technologies 2017, 5, 45. [Google Scholar] [CrossRef]
- Woern, A.L.; Pearce, J.M. Distributed Manufacturing of Flexible Products: Technical Feasibility and Economic Viability. Technologies 2017, 5, 71. [Google Scholar] [CrossRef]
- Smith, P. Commons people: Additive manufacturing enabled collaborative commons production. In Proceedings of the 15th RDPM Conference, Loughborough, UK, 26–27 April 2015. [Google Scholar]
- Gallup, N.; Bow, J.; Pearce, J. Economic Potential for Distributed Manufacturing of Adaptive Aids for Arthritis Patients in the US. Geriatrics 2018, 3, 89. [Google Scholar] [CrossRef]
- Hietanen, I.; Heikkinen, I.T.S.; Savin, H.; Pearce, J.M. Approaches to open source 3-D printable probe positioners and micromanipulators for probe stations. HardwareX 2018, 4, e00042. [Google Scholar] [CrossRef]
- Sule, S.S.; Petsiuk, A.L.; Pearce, J.M. Open Source Completely 3-D Printable Centrifuge. Instruments 2019, 3, 30. [Google Scholar] [CrossRef]
- Oberloier, S.; Pearce, J.M. Belt-Driven Open Source Circuit Mill Using Low-Cost 3-D Printer Components. Inventions 2018, 3, 64. [Google Scholar] [CrossRef]
- Blasch, B.B.; Wiener, W.R.; Welsh, R.L. Foundations of Orientation and Mobility, 2nd ed.; AFB Press: New York, NY, USA, 1997. [Google Scholar]
- SparkFun Electronics. HC-SR04 Ultrasonic Sensor Datasheet. Available online: https://github.com/sparkfun/HC-SR04_UltrasonicSensor (accessed on 5 July 2019).
- Precision Microdrives. PicoVibe Flat 3 × 10 mm Vibration Motor Datasheet. Available online: https://www.precisionmicrodrives.com/wp-content/uploads/2016/04/310-101-datasheet.pdf (accessed on 5 July 2019).
- Horev, G.; Saig, A.; Knutsen, P.M.; Pietr, M.; Yu, C.; Ahissar, E. Motor–sensory convergence in object localization: A comparative study in rats and humans. Philos. Trans. R. Soc. Lond. B Biol. Sci. 2011, 366, 3070–3076. [Google Scholar] [CrossRef] [PubMed]
- Lenay, C.; Gapenne, O.; Hanneton, S.; Marque, C.; Genouëlle, C. Sensory substitution: Limits and perspectives. In Touching for Knowing: Cognitive Psychology of Haptic Manual Perception; Advances in Consciousness Research; Hatwell, Y., Streri, A., Gentaz, E., Eds.; John Benjamins Publishing Company: Amsterdam, The Netherlands, 2003; pp. 276–292. [Google Scholar]
- MOST: Ultrasound-Based Navigational Support, Arduino Nano Firmware. Available online: https://github.com/apetsiuk/MOST-Ultrasound-based-Navigational-Support (accessed on 7 July 2019).
- CAD Source Models for the Ultrasound-Sensing Based Navigational Support for Visually Impaired. Available online: https://www.thingiverse.com/thing:3717730 (accessed on 5 July 2019).
- Customizable Flexible Bracelet for the Ultrasound-Based Navigational Support. Available online: https://www.thingiverse.com/thing:3733136 (accessed on 7 July 2019).
- Arduino IDE. Available online: https://www.arduino.cc/en/Main/Software (accessed on 5 July 2019).
- NIST/SEMATECH e-Handbook of Statistical Methods. Available online: https://www.itl.nist.gov/div898/handbook//pmc/section4/pmc431.htm (accessed on 5 July 2019).
- Gottschalk, A.; Smith, D.S. New concepts in acute pain therapy: Preemptive analgesia. Am. Fam. Phys. 2001, 63, 1979–1985. [Google Scholar]
- Borstad, J.; Woeste, C. The role of sensitization in musculoskeletal shoulder pain. Braz. J. Phys. Ther. 2015, 19. [Google Scholar] [CrossRef] [PubMed]
- Savindu, H.P.; Iroshan, K.A.; Panangala, C.D.; Perera, W.L.; Silva, A.C. BrailleBand: Blind support haptic wearable band for communication using braille language. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC), Banff, AB, Canada, 5–8 October 2017; pp. 1381–1386. [Google Scholar] [CrossRef]
- Sekuler, R.; Blake, R. Perception; McGraw-Hill: New York, NY, USA, 2002. [Google Scholar]
- Roe, A.W.; Friedman, R.M.; Chen, L.M. Multiple Representation in Primate SI: A View from a Window on the Brain. In Handbook of Neurochemistry and Molecular Neurobiology; Lajtha, A., Johnson, D.A., Eds.; Springer: Boston, MA, USA, 2007; pp. 1–16. [Google Scholar]
- Nau, A.C.; Pintar, C.; Fisher, C.; Jeong, J.H.; Jeong, K. A Standardized Obstacle Course for Assessment of Visual Function in Ultra Low Vision and Artificial Vision. J. Vis. Exp. 2014, 84, e51205. [Google Scholar] [CrossRef] [PubMed]
- Stuart, M.B.; Turman, A.B.; Shaw, J.A.; Walsh, N.; Nguyen, V.A. Effects of aging on vibration detection thresholds at various body regions. BMC Geriatr. 2003, 3. [Google Scholar] [CrossRef]
- Bermejo, C.; Hui, P. A survey on haptic technologies for mobile augmented reality. arXiv 2017, arXiv:1709.00698. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Quantity | Cost, USD |
|---|---|---|
| 3-D printed case | 1 | 0.65 |
| 3-D printed back cap | 1 | 0.25 |
| 3-D printed bracelet | 1 | 0.40 |
| 3-D printed vibration motor pad | 1 | 0.05 |
| 3-D printed locking rings | 2 | 0.05 |
| Arduino Nano | 1 | 3.80 |
| Ultrasonic Sensor HC-SR04 | 1 | 1.83 |
| Flat 10 mm 3 V vibration motor | 1 | 1.40 |
| 400 mAh lithium polymer battery | 1 | 7.49 |
| Micro USB 5 V 1 A 18650 TP4056 lithium battery charger | 1 | 1.20 |
| *DC-DC 5V boost step-up module (optional) | *1 | *5.99 |
| Slide switch | 1 | 0.40 |
| 0.25W 1 kΩ resistor | 2 | <0.01 |
| Ceramic 0.1uF capacitor | 1 | 0.07 |
| 1N4007 diode | 1 | 0.08 |
| 2N2222 transistor | 1 | 0.07 |
| 5 mm LED | 1 | 0.07 |
| Total cost, USD | 17.82 *(23.81 with optional module) | |
| Participants | Tests | |||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| a | b | c | d | e | f | g | h | i | ||||||||||
| Device Model | ||||||||||||||||||
| 1 | 2 | 1 | 2 | 1 | 2 | 1 | 2 | 1 | 2 | 1 | 2 | 1 | 2 | 1 | 2 | 1 | 2 | |
| 1 | • | ‒ | • | • | • | • | • | • | • | • | • | • | • | • | • | • | • | • |
| 2 | • | • | • | • | • | • | • | • | • | • | • | • | • | • | • | • | • | • |
| 3 | • | • | • | • | • | • | • | • | • | • | • | • | • | • | • | • | • | ‒ |
| 4 | • | • | • | • | ‒ | ‒ | • | • | • | • | • | • | • | ‒ | • | • | • | • |
| 5 | • | • | • | • | • | • | • | • | • | • | • | • | • | ‒ | • | • | • | • |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Petsiuk, A.L.; Pearce, J.M. Low-Cost Open Source Ultrasound-Sensing Based Navigational Support for the Visually Impaired. Sensors 2019, 19, 3783. https://doi.org/10.3390/s19173783
Petsiuk AL, Pearce JM. Low-Cost Open Source Ultrasound-Sensing Based Navigational Support for the Visually Impaired. Sensors. 2019; 19(17):3783. https://doi.org/10.3390/s19173783
Chicago/Turabian StylePetsiuk, Aliaksei L., and Joshua M. Pearce. 2019. "Low-Cost Open Source Ultrasound-Sensing Based Navigational Support for the Visually Impaired" Sensors 19, no. 17: 3783. https://doi.org/10.3390/s19173783
APA StylePetsiuk, A. L., & Pearce, J. M. (2019). Low-Cost Open Source Ultrasound-Sensing Based Navigational Support for the Visually Impaired. Sensors, 19(17), 3783. https://doi.org/10.3390/s19173783