Dynamic Walking of a Legged Robot in Underwater Environments

 ,
,  and
and 
Abstract
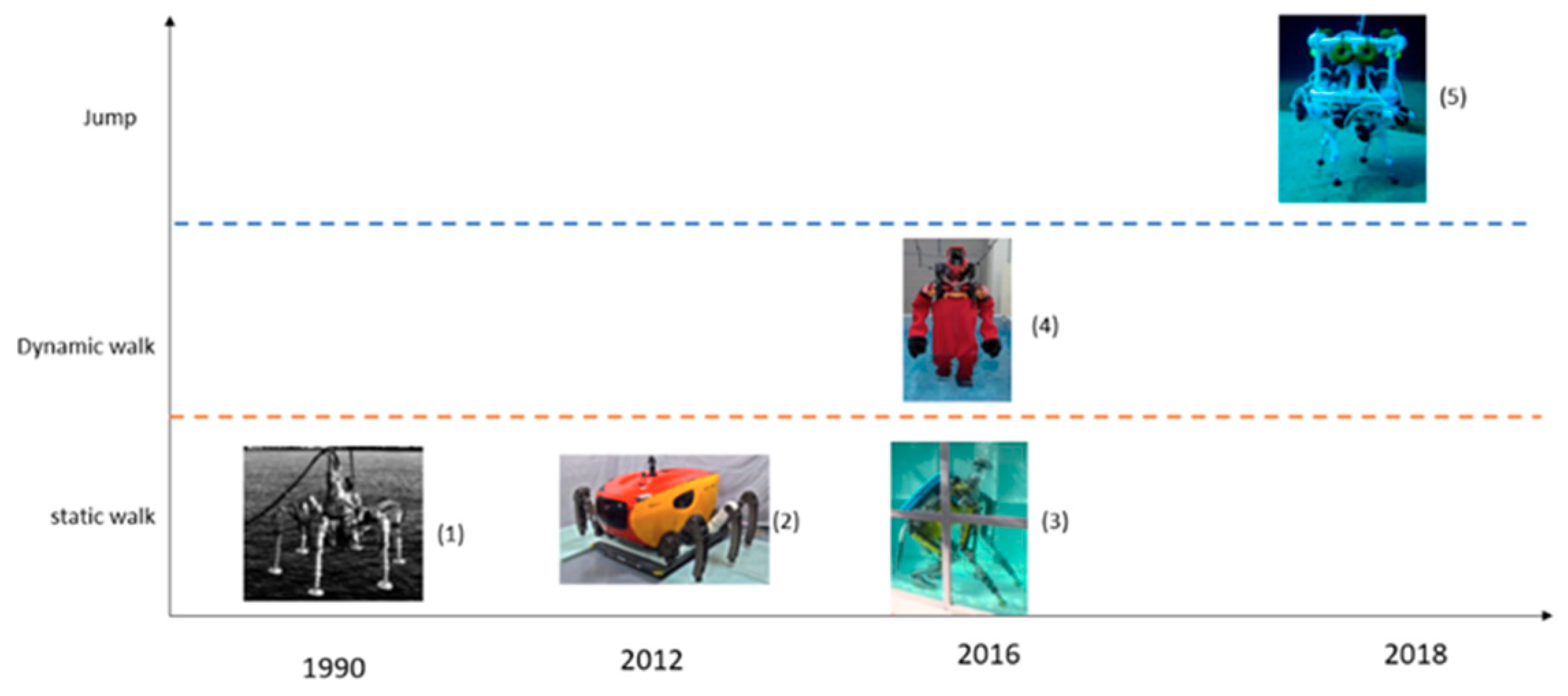
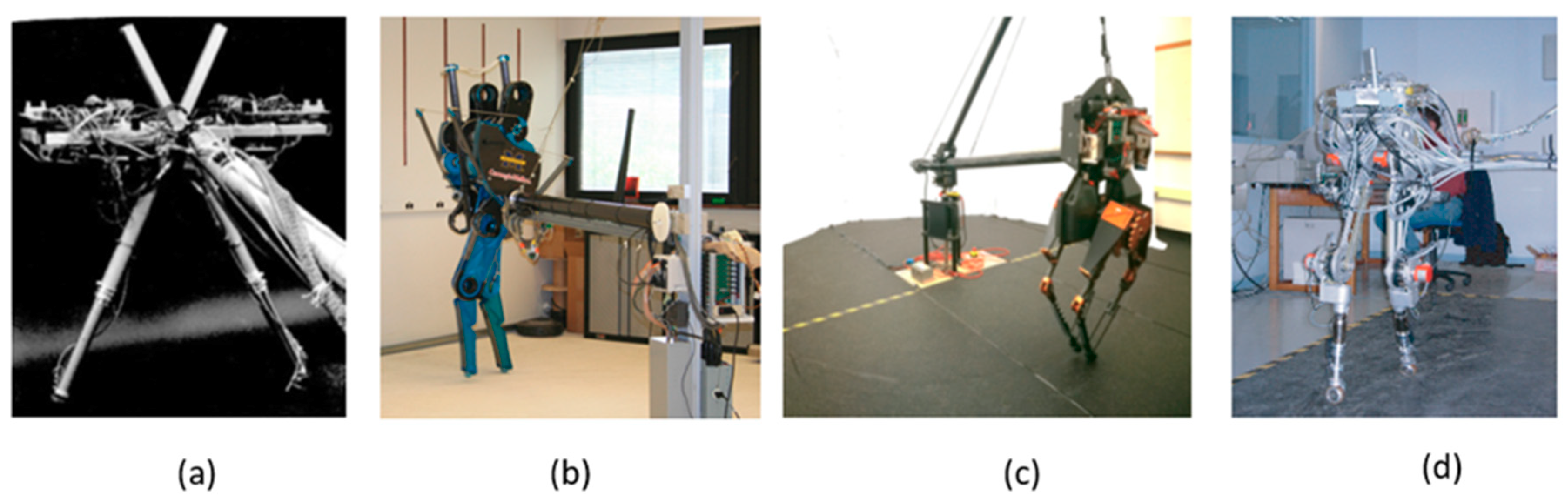
1. Introduction
2. Materials and Methods
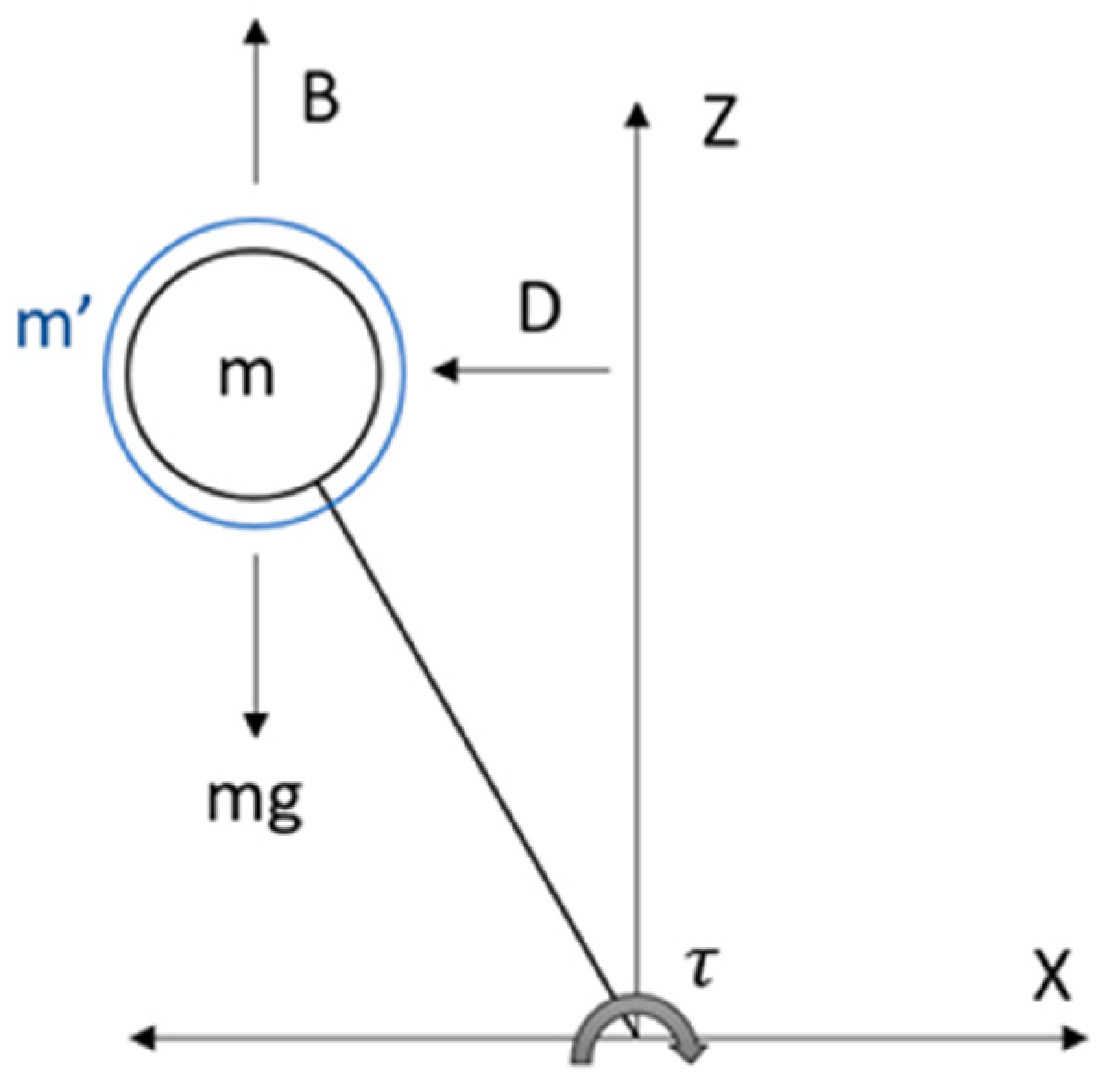
2.1. Underwater Inverted Pendulum (UIP)
2.1.1. Simplification of Buoyant Force
2.1.2. Hydrodynamic Damping
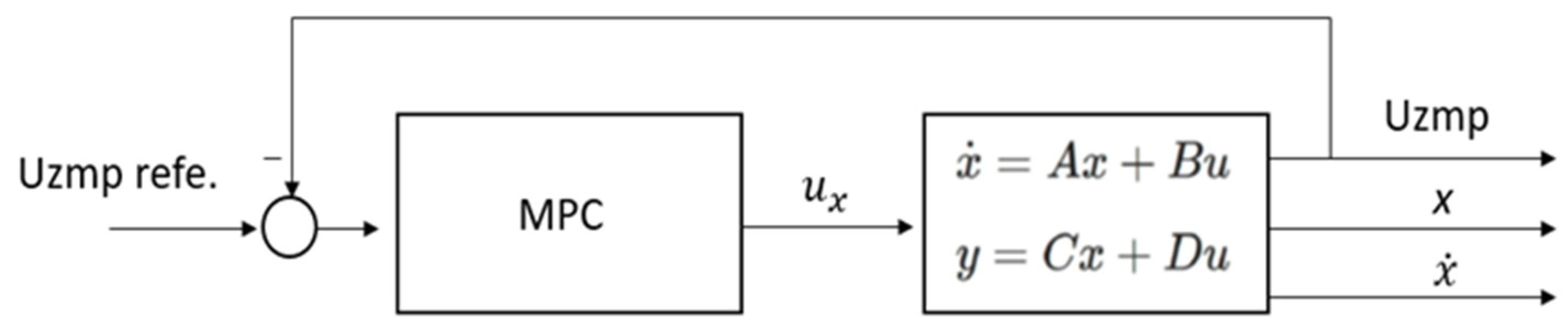
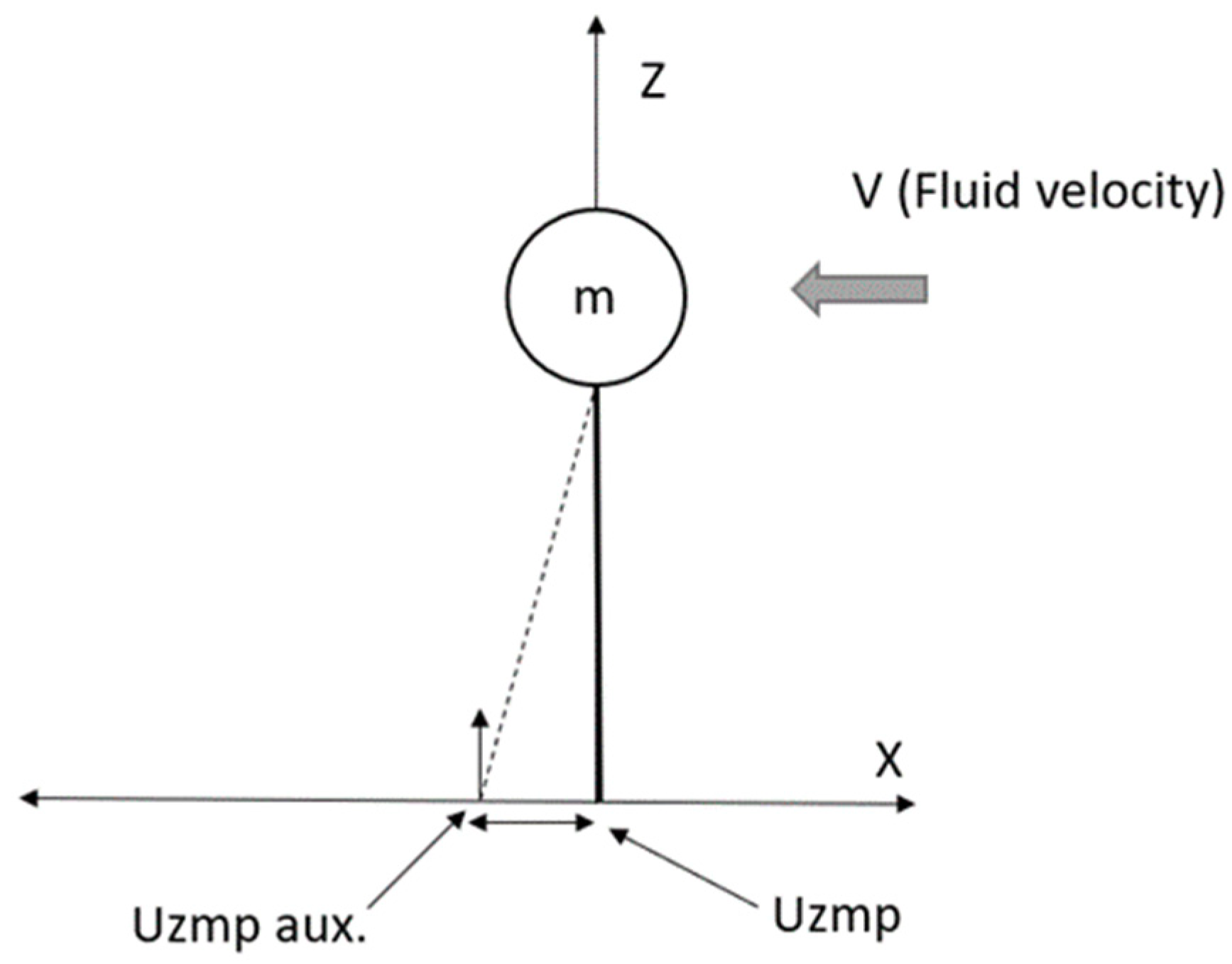
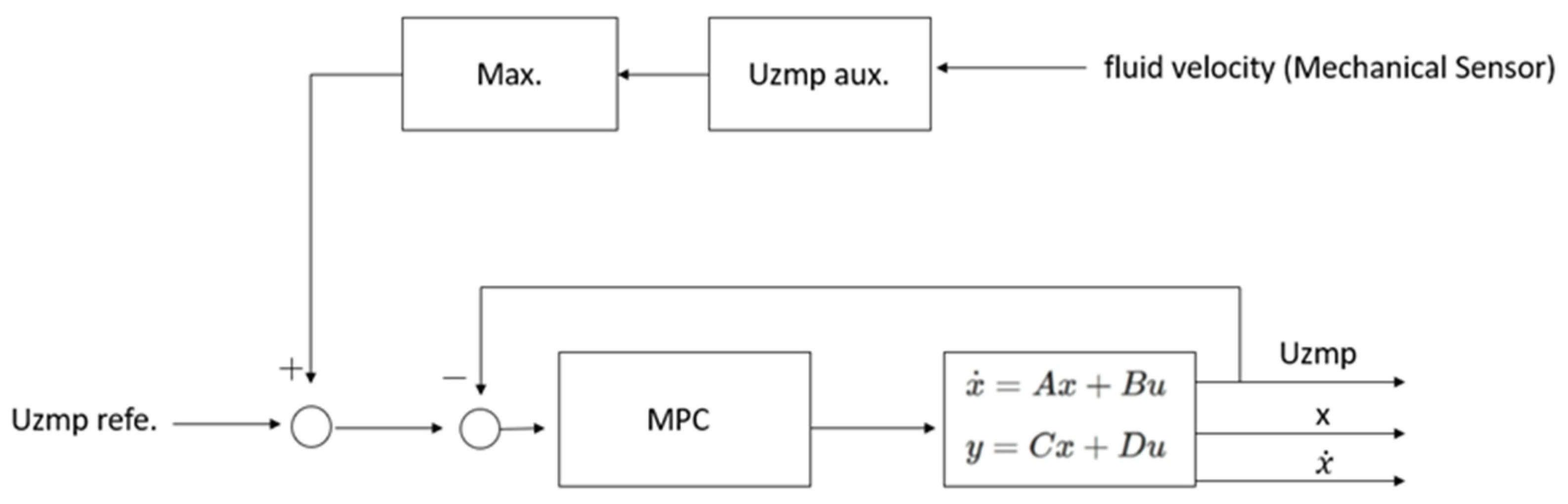
2.2. Underwater Zero Moment Point
Walking Pattern Generation
2.3. Reaction Step for Balance Recovery
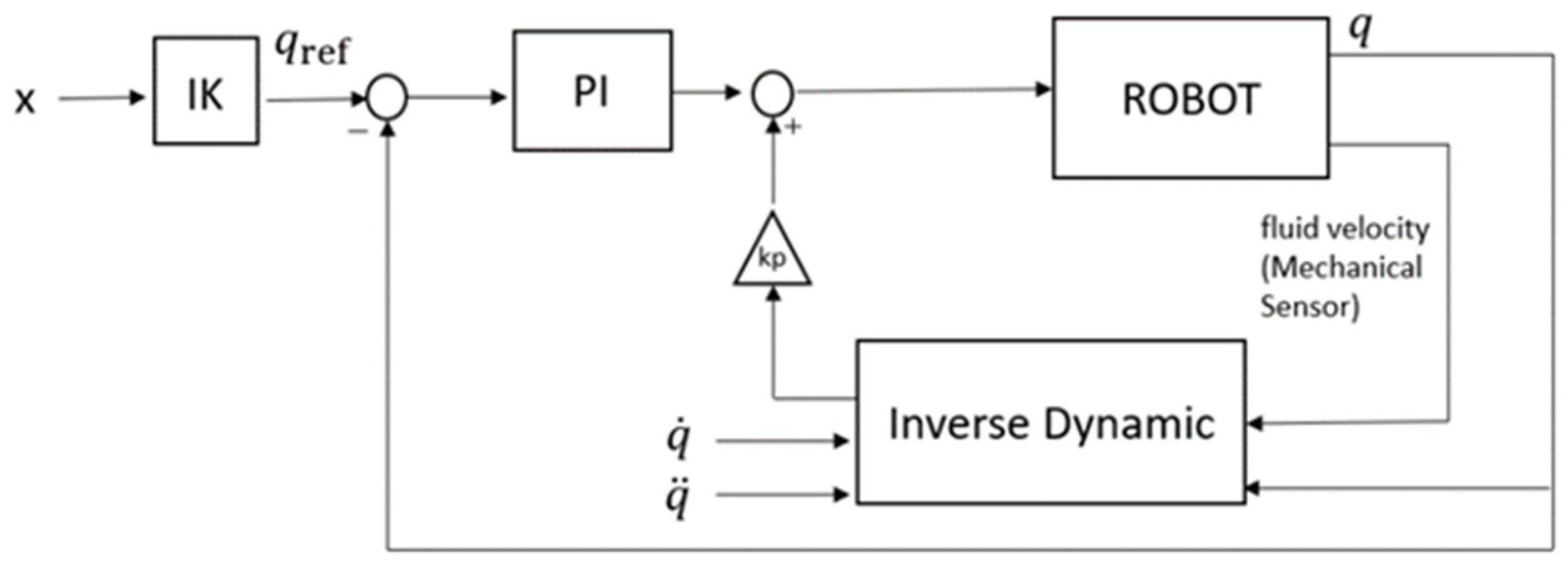
2.4. Dynamic and Control Position
2.4.1. Inverse Dynamic
2.4.2. Control Position
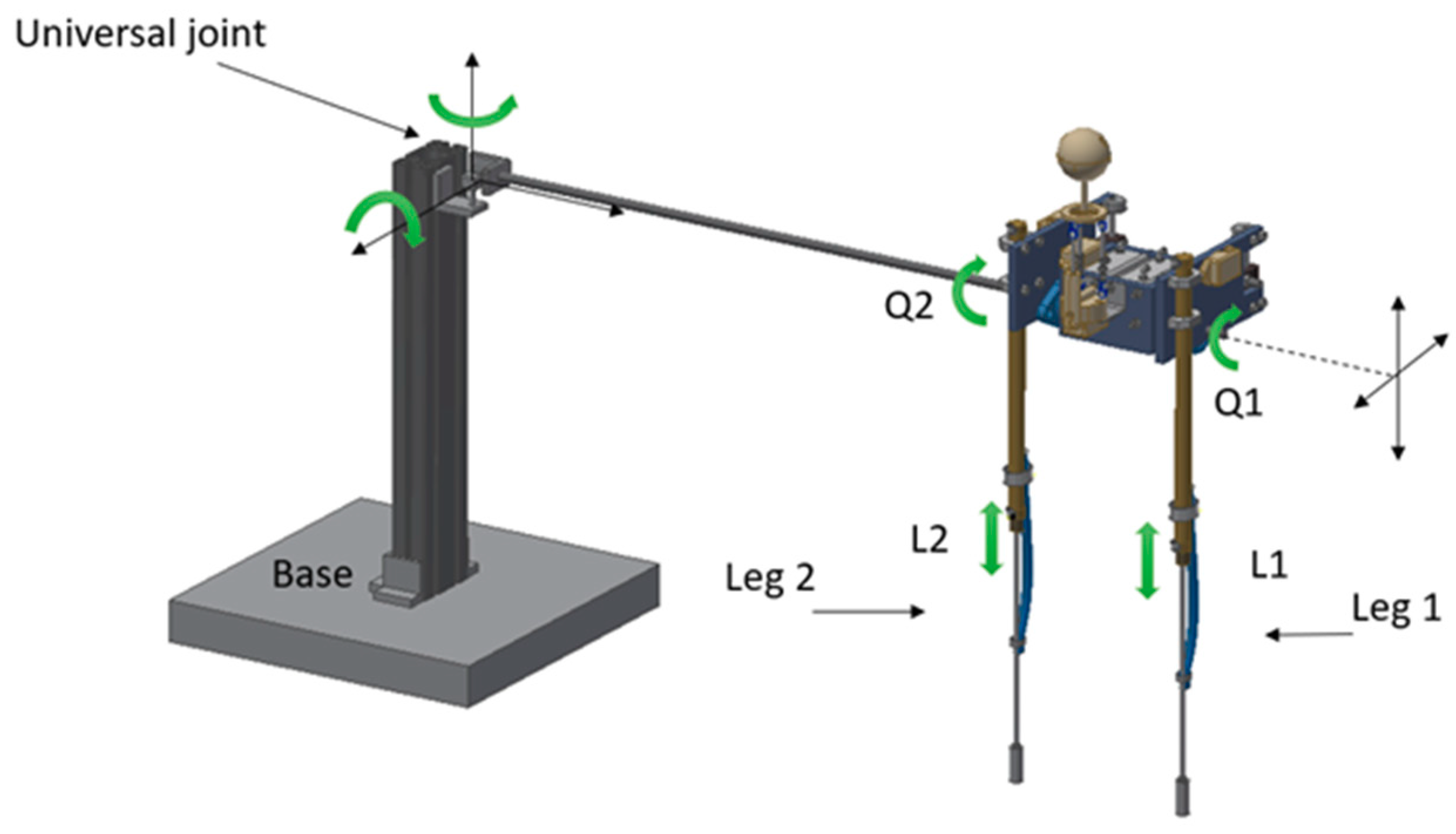
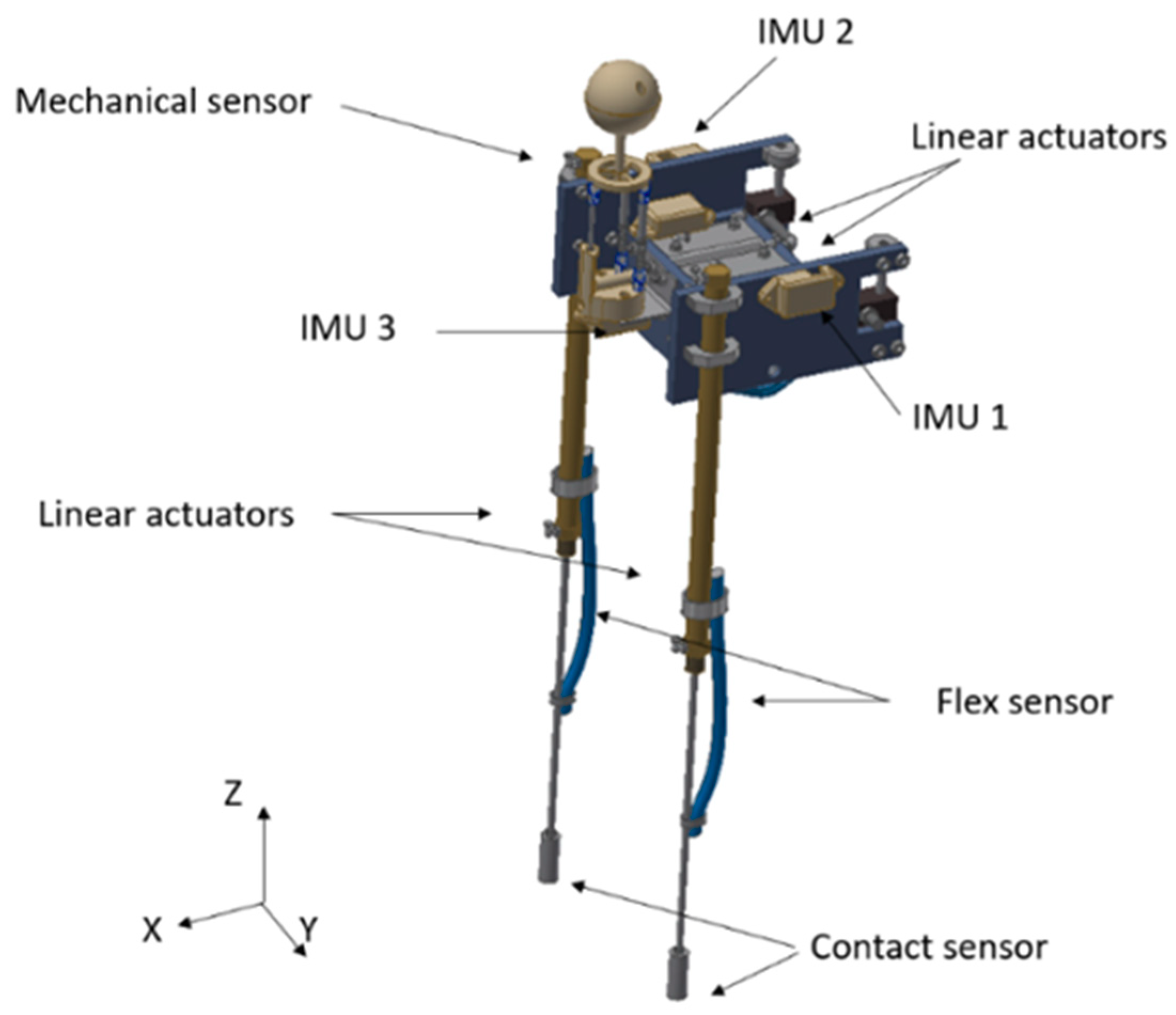
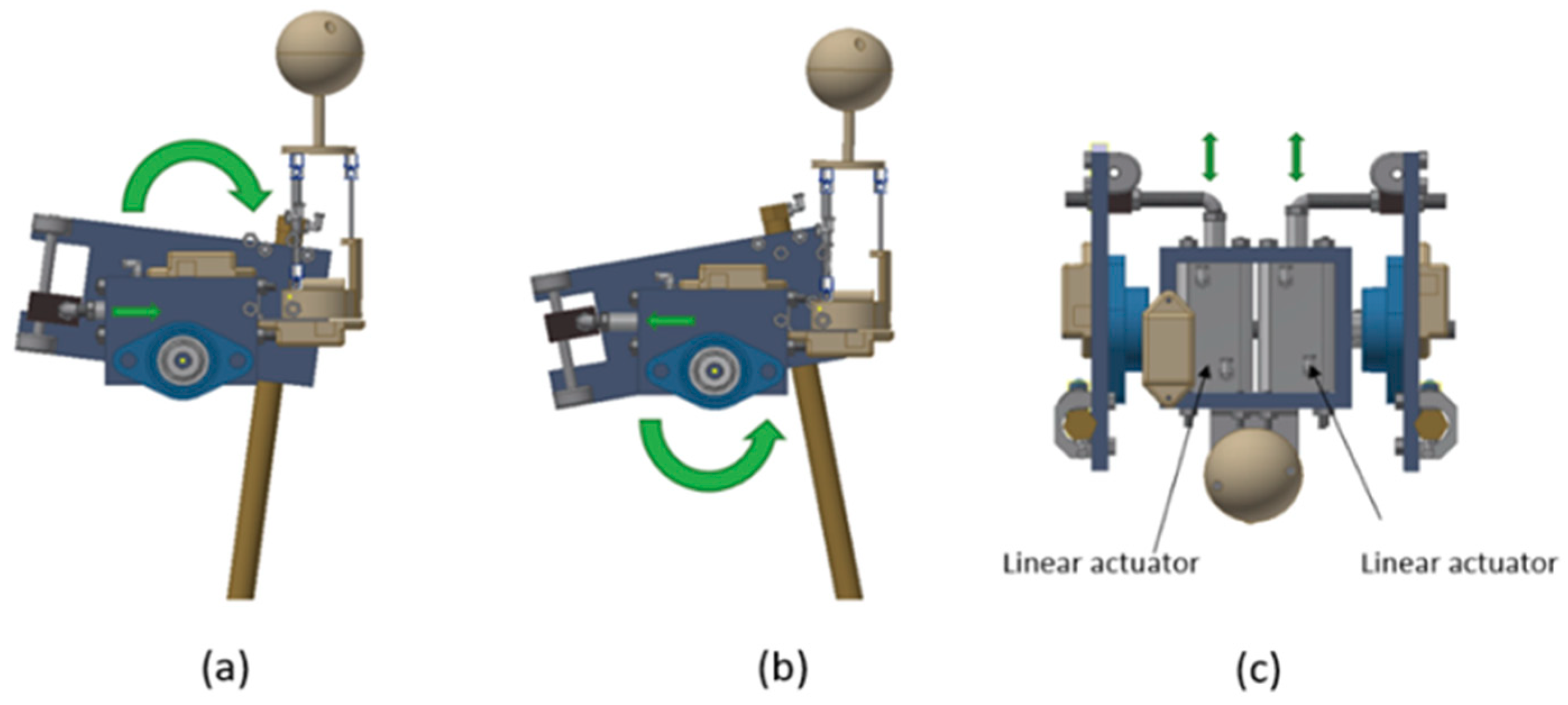
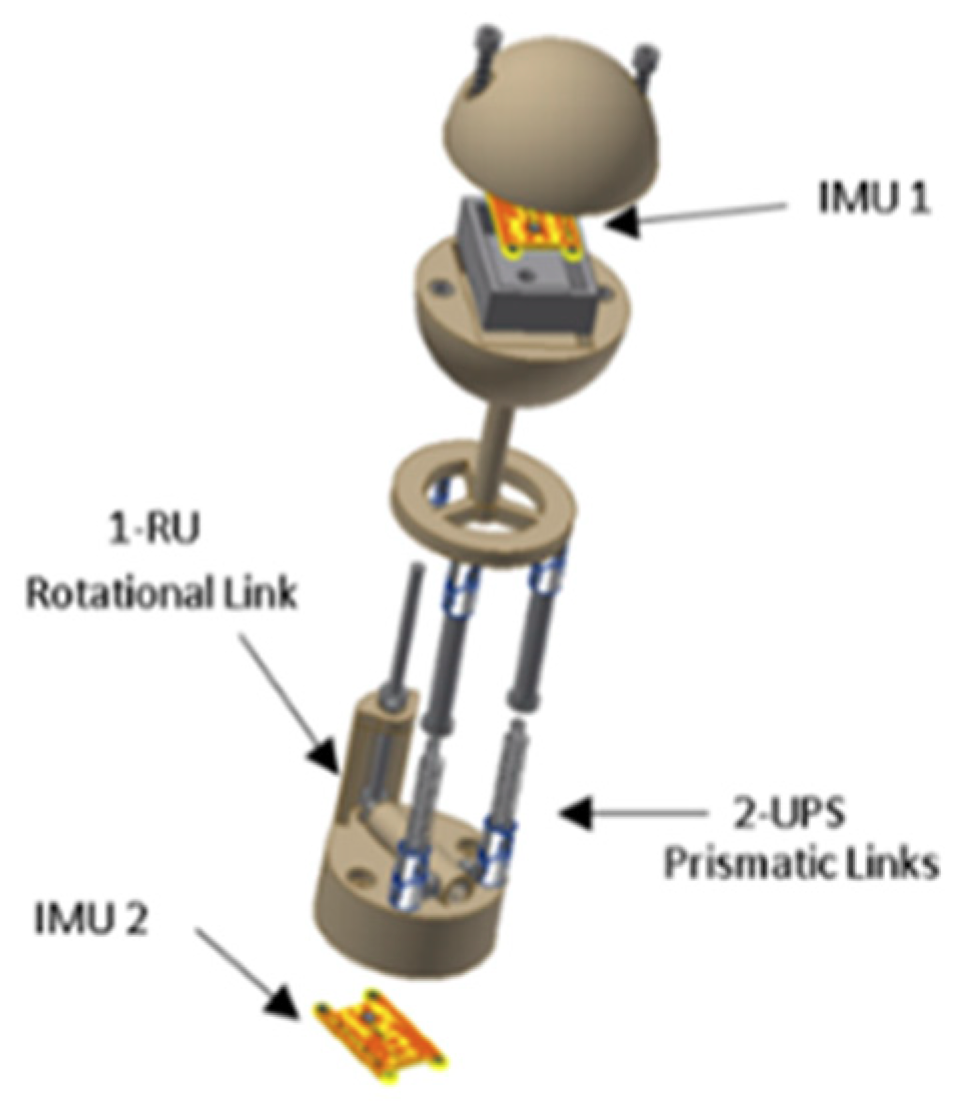
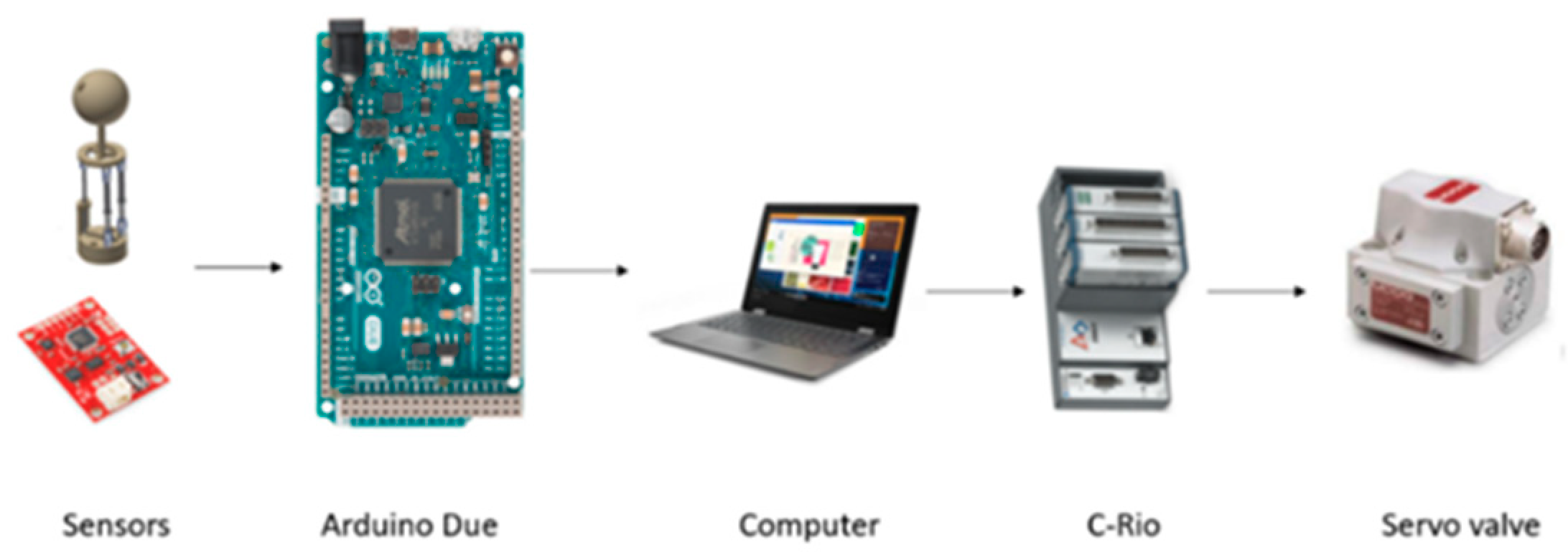
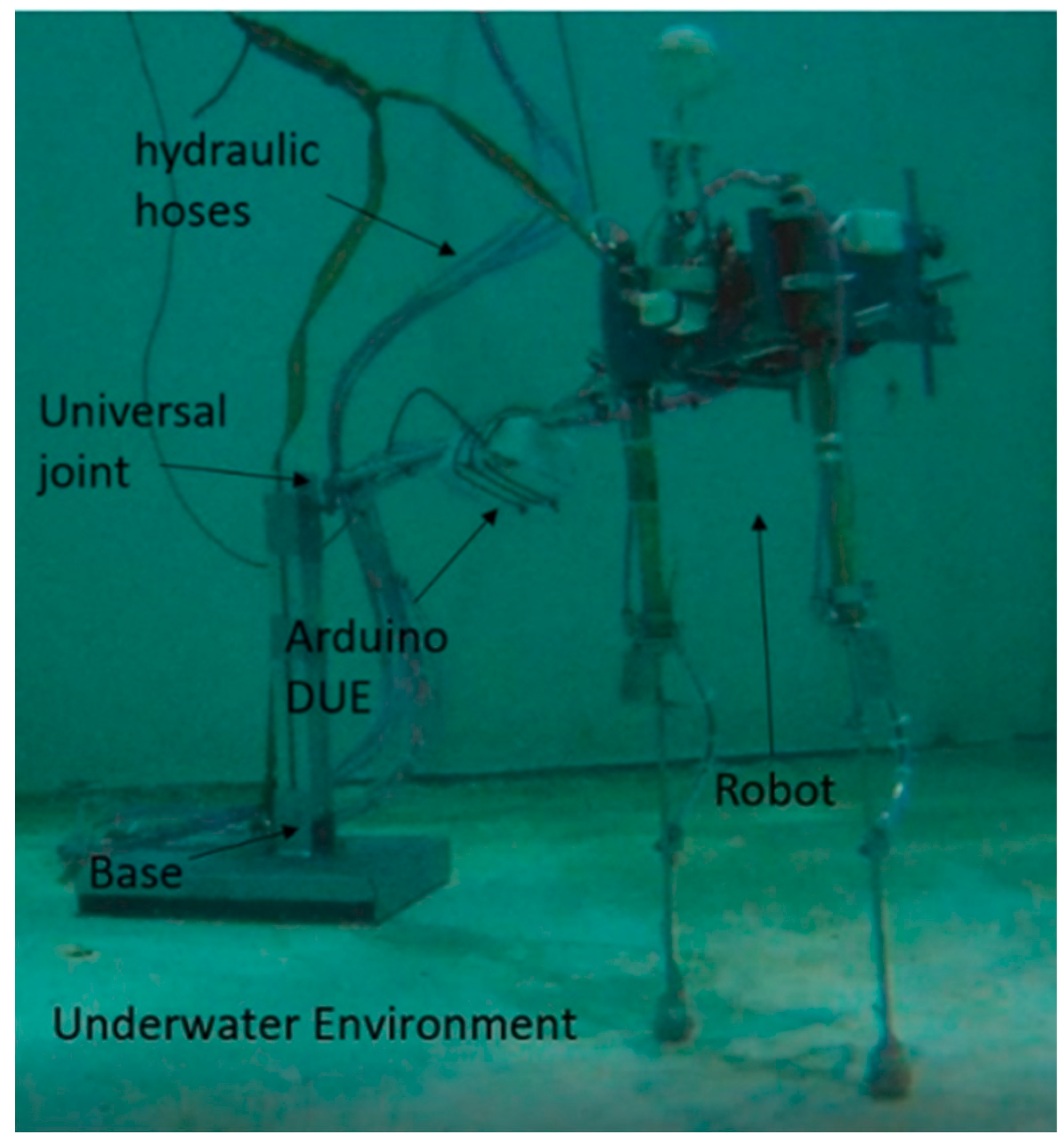
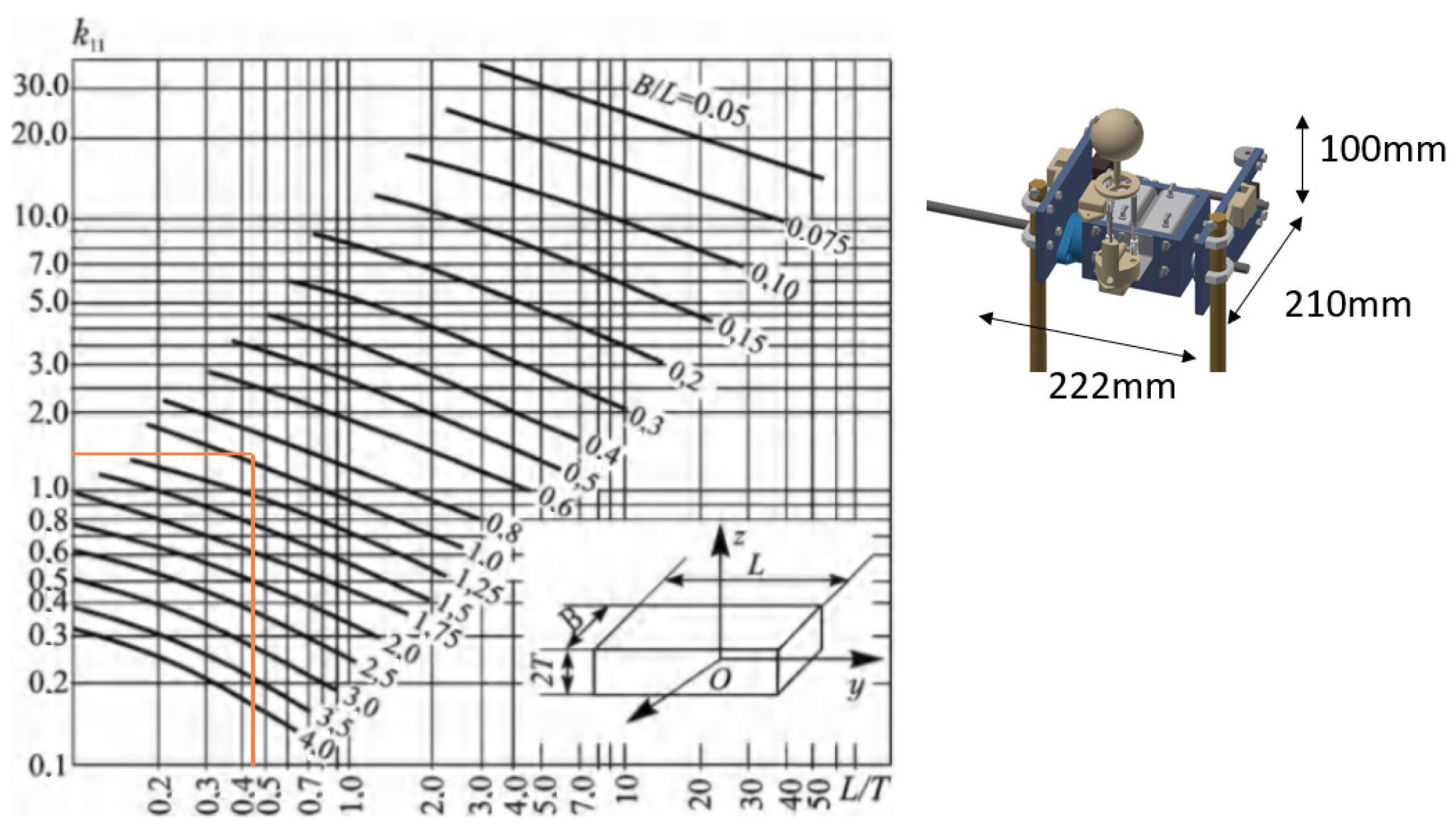
2.5. Description of Prototype
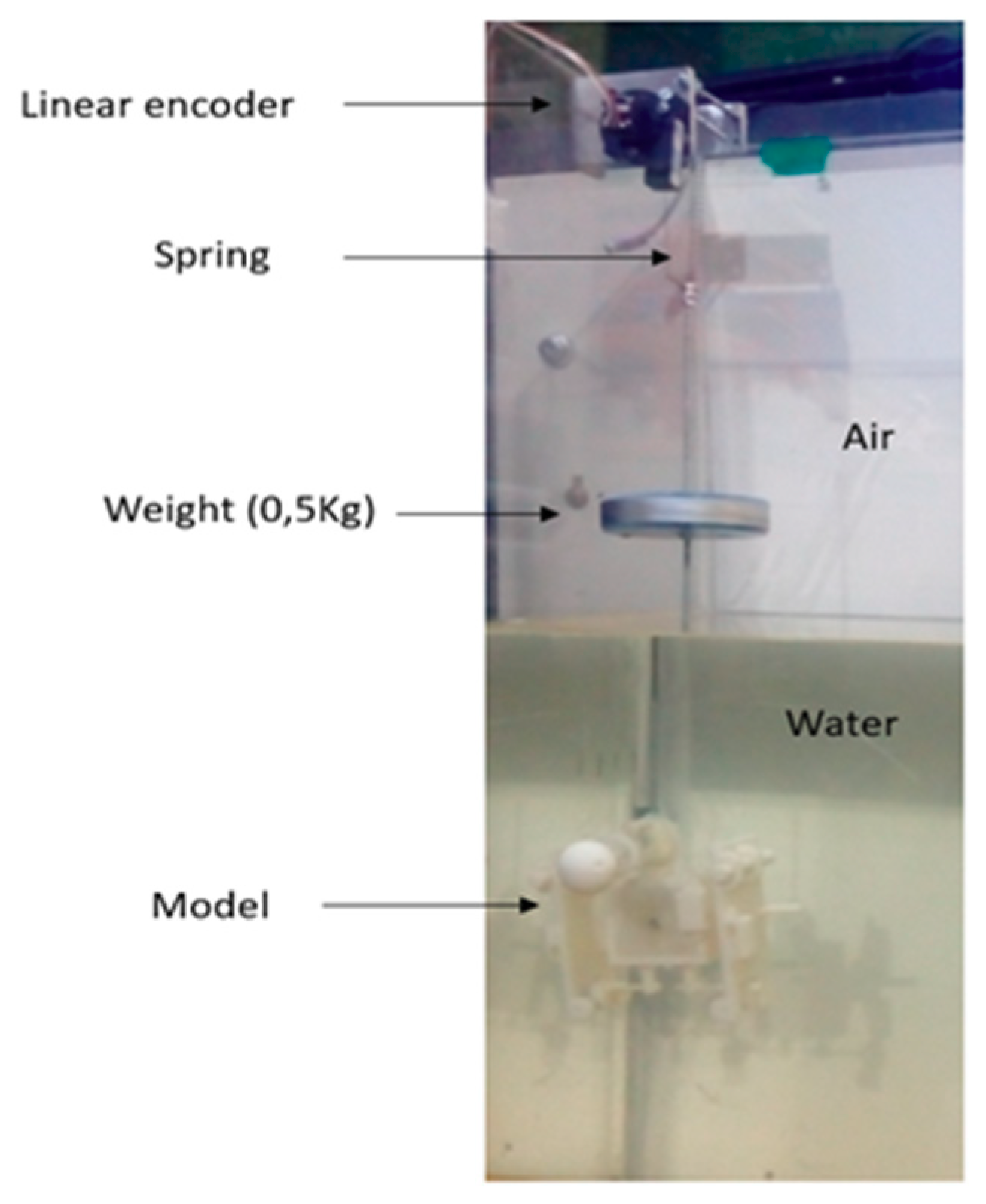
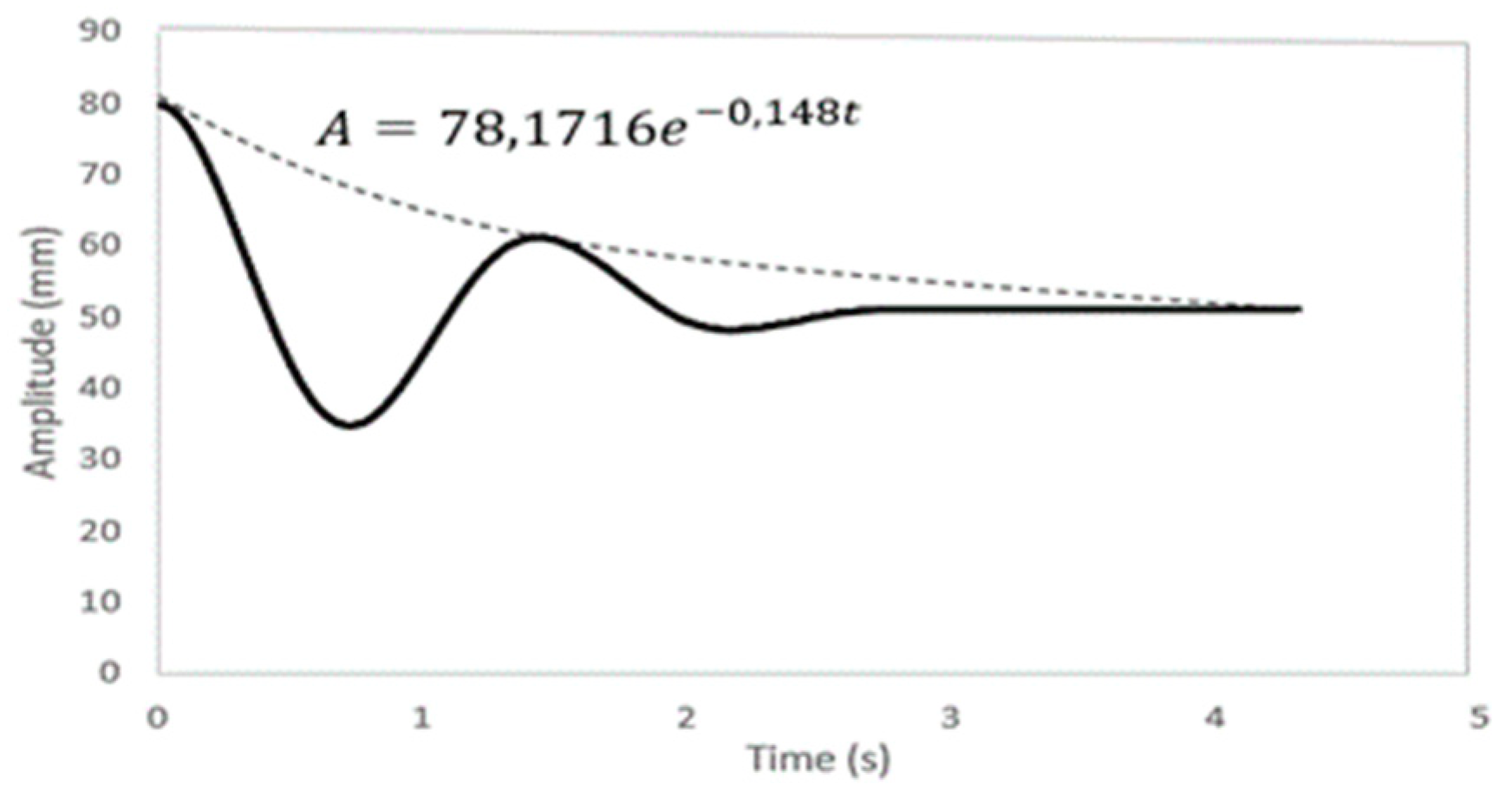
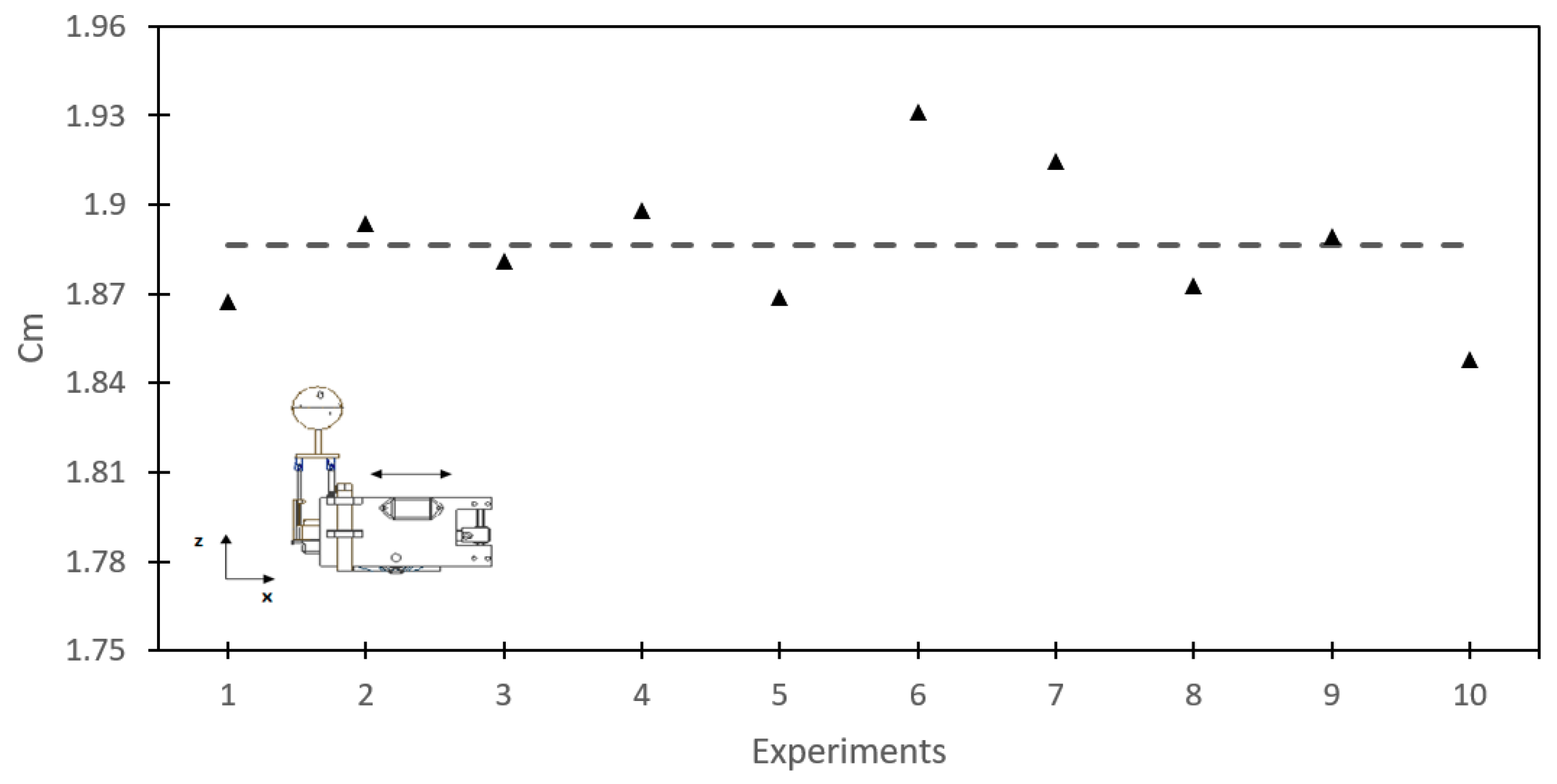
2.5.1. Hydrodynamic Mass
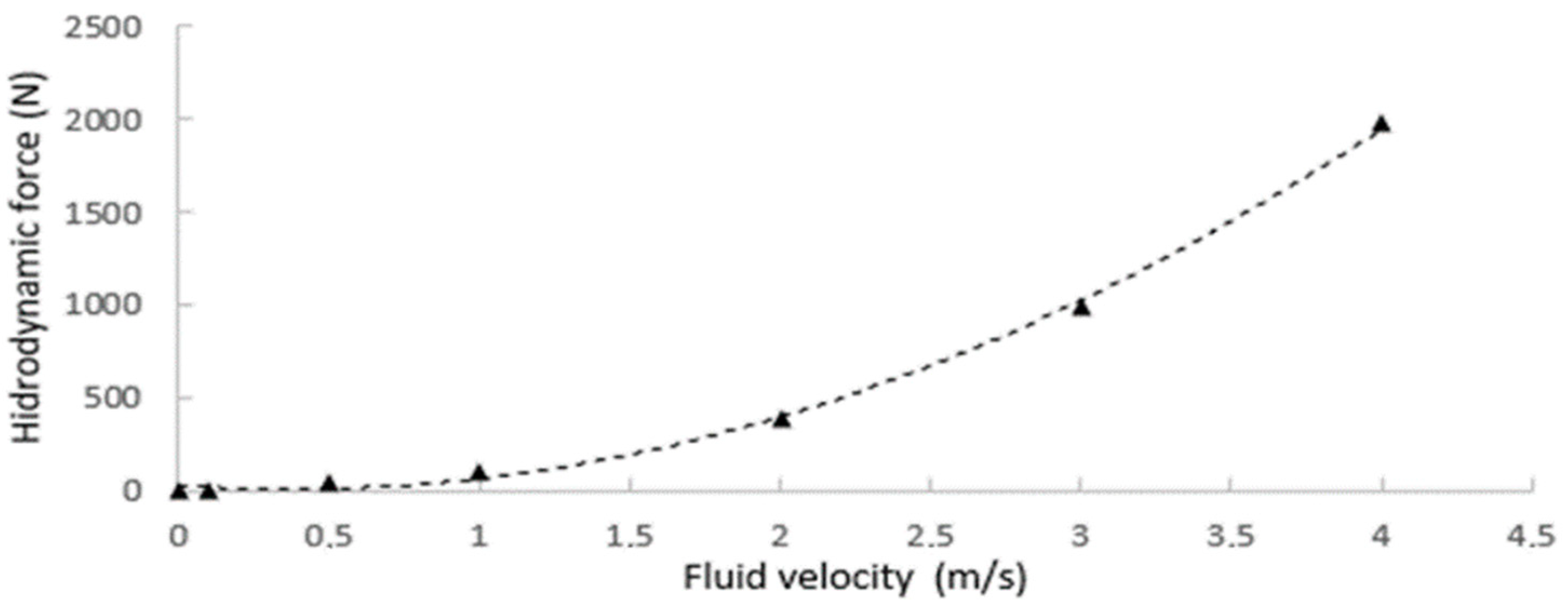
2.5.2. Damping Coefficients
2.6. Experiment
3. Results
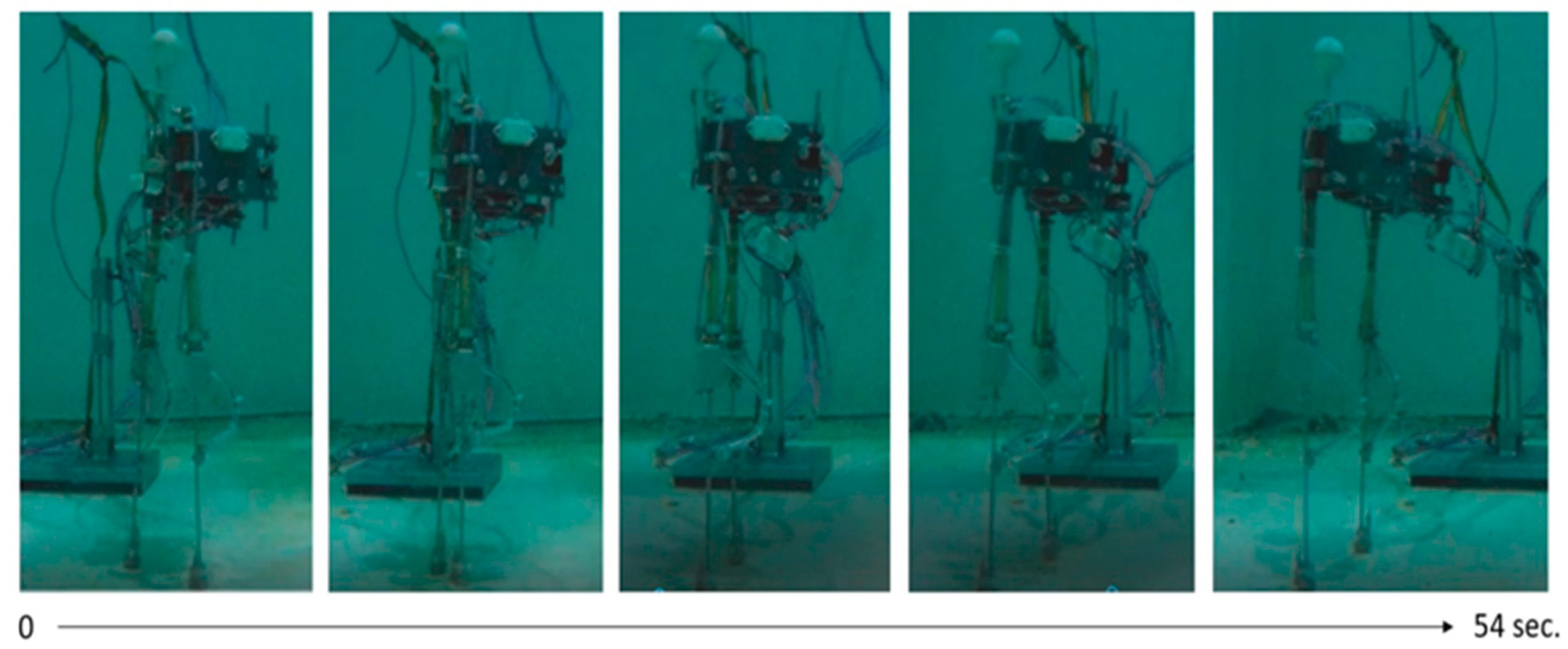
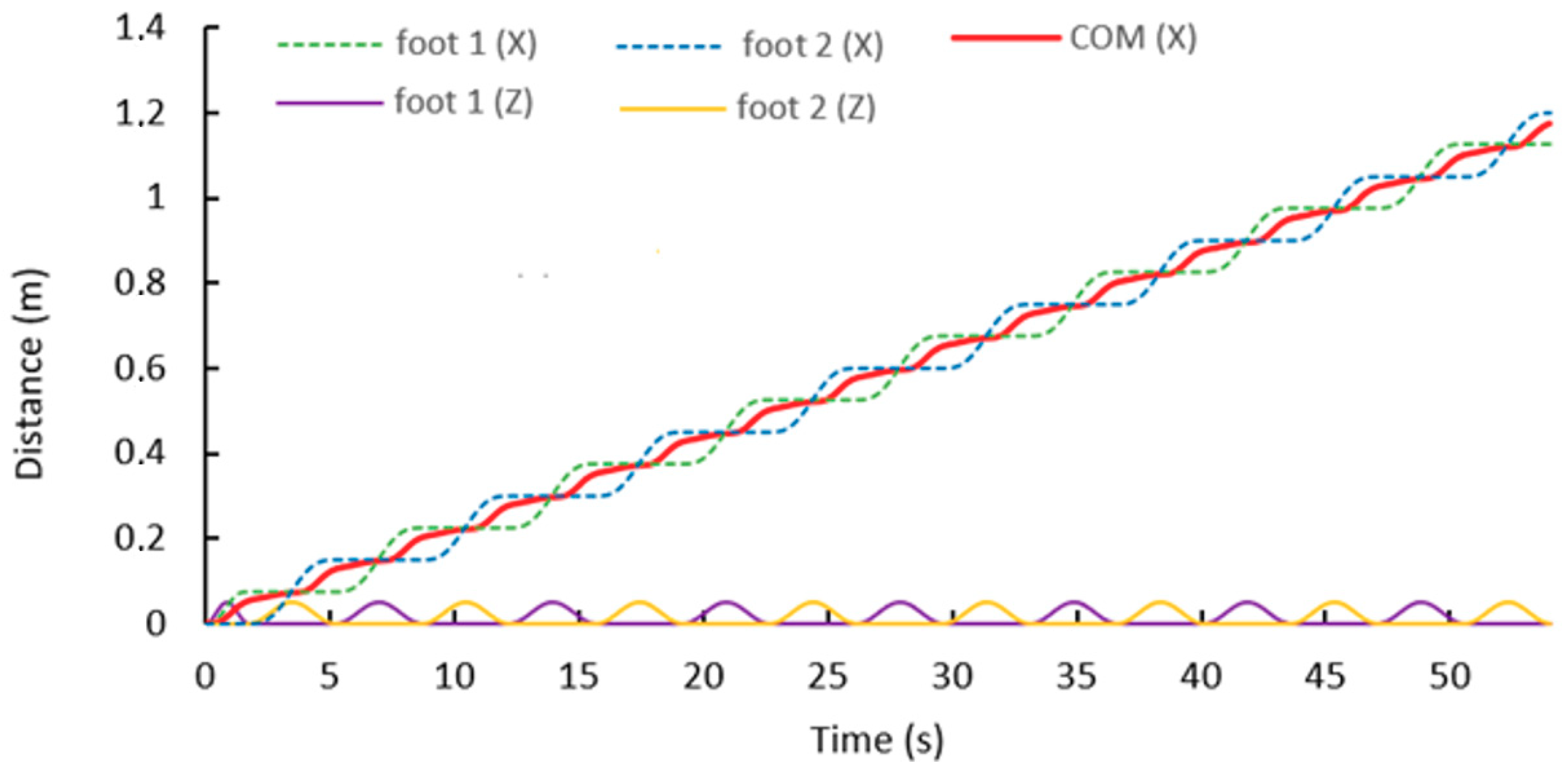
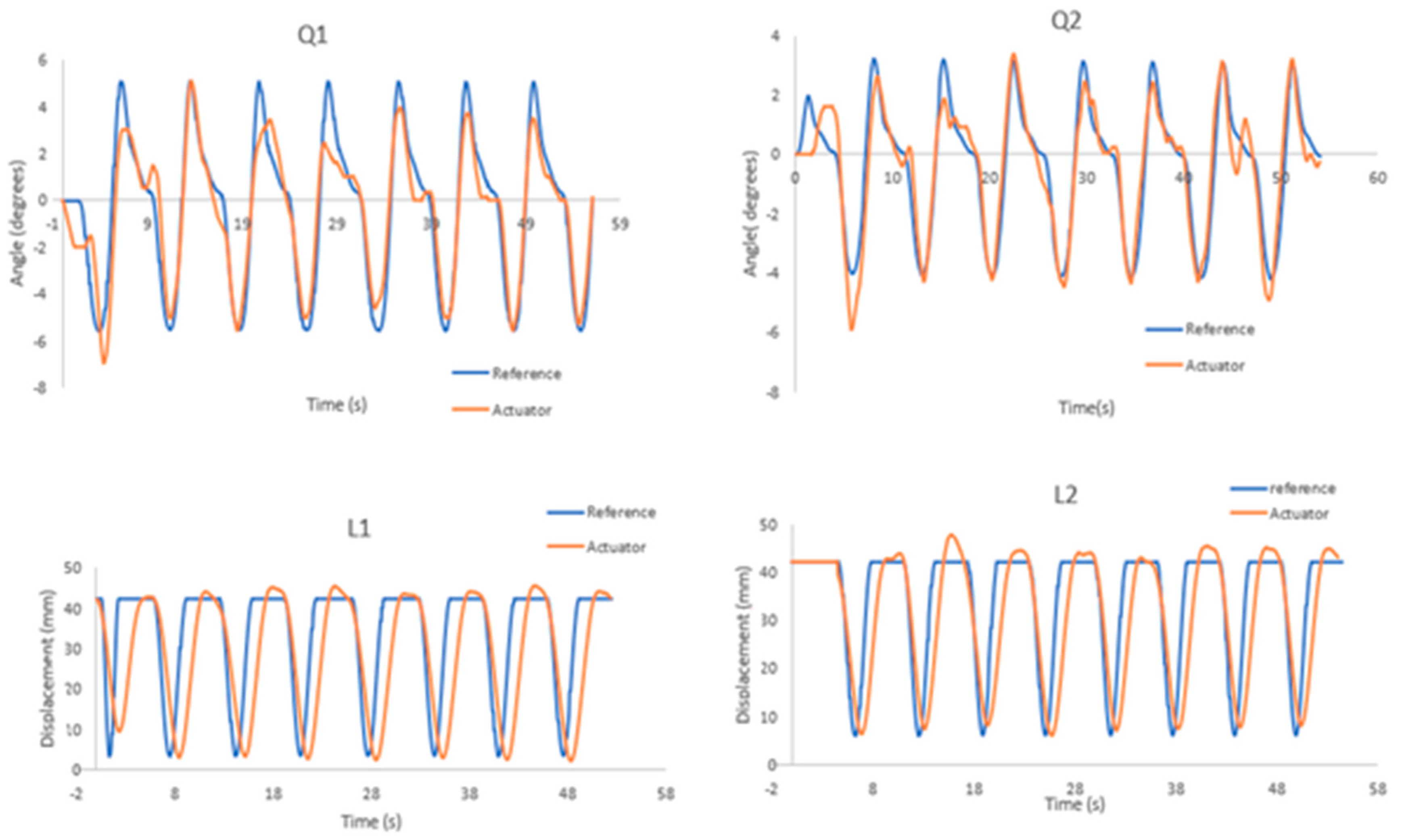
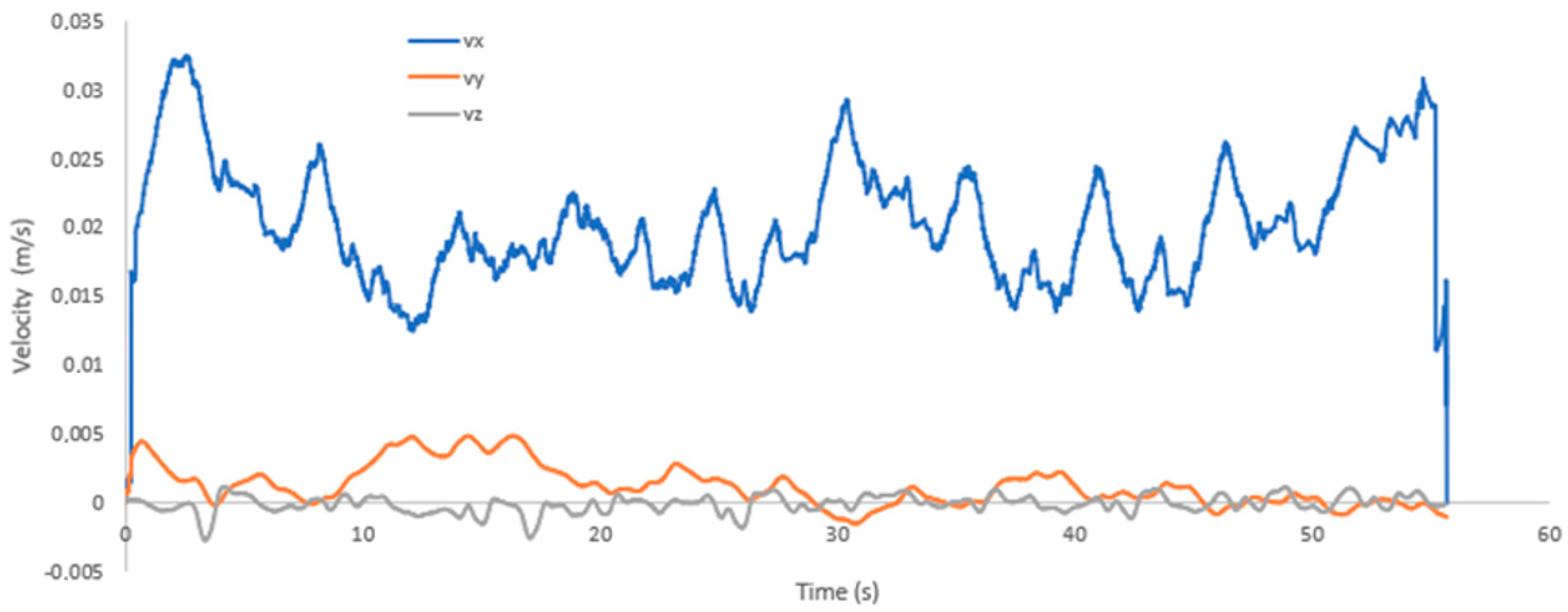
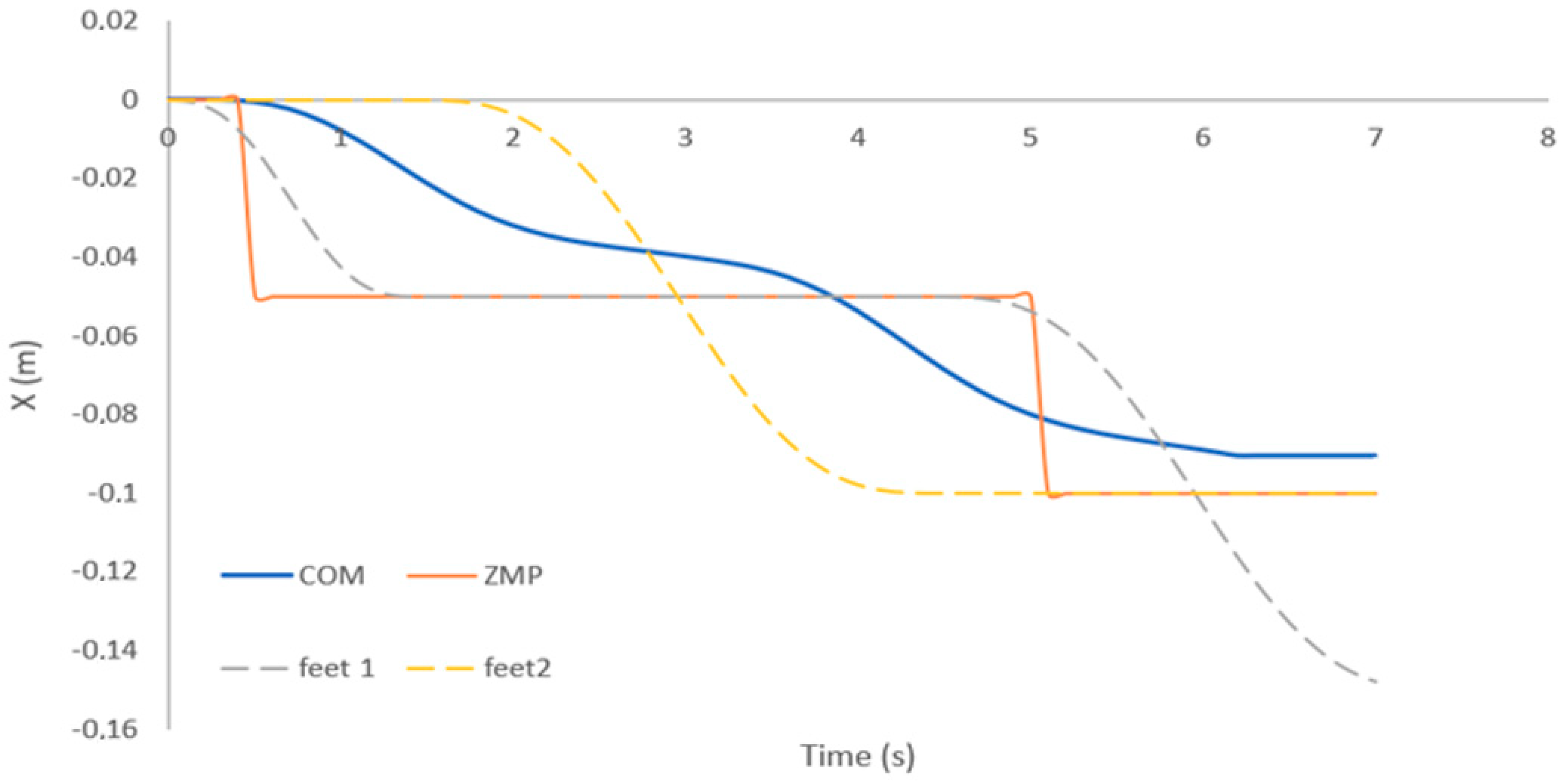
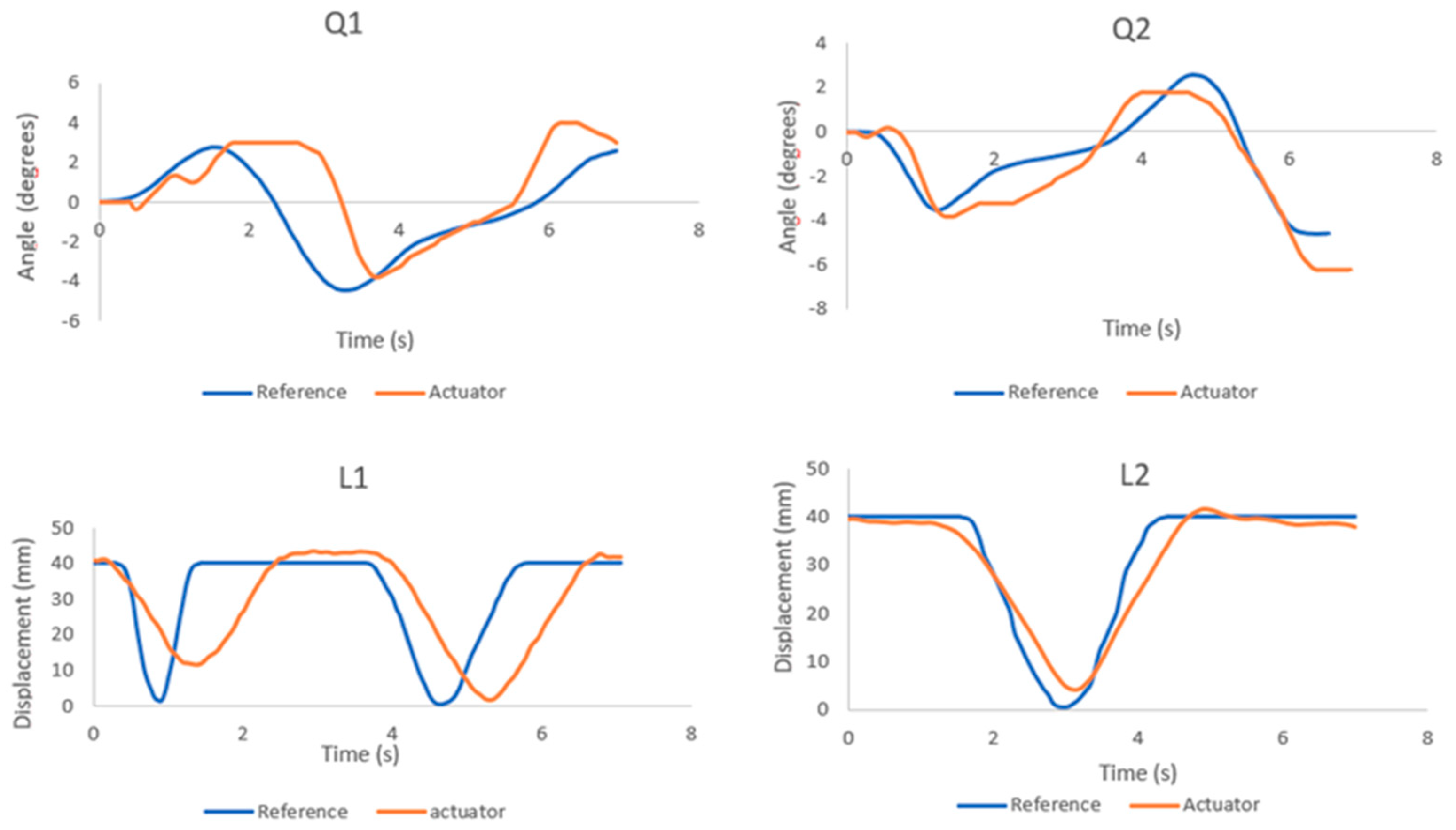
3.1. Walking
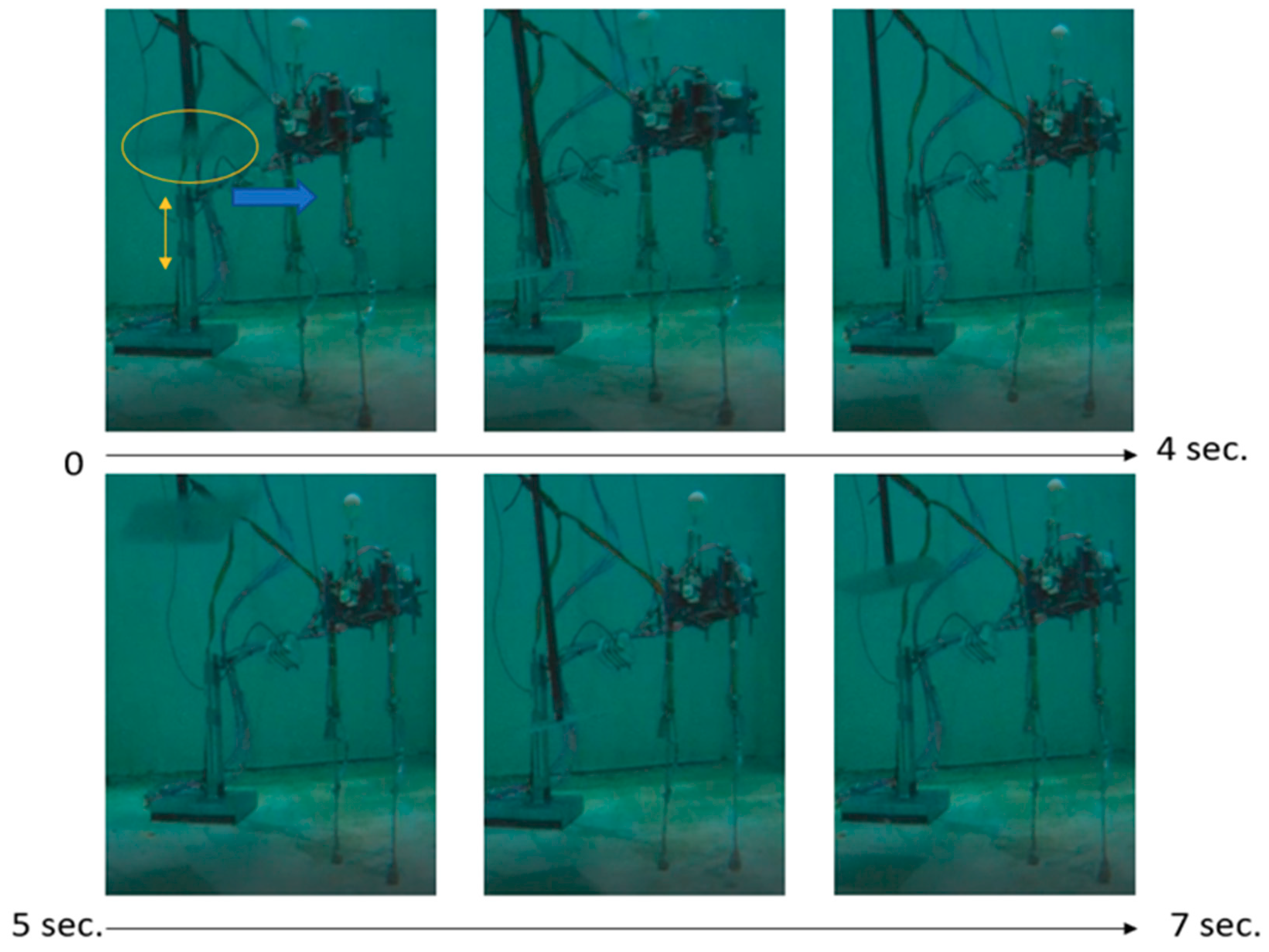
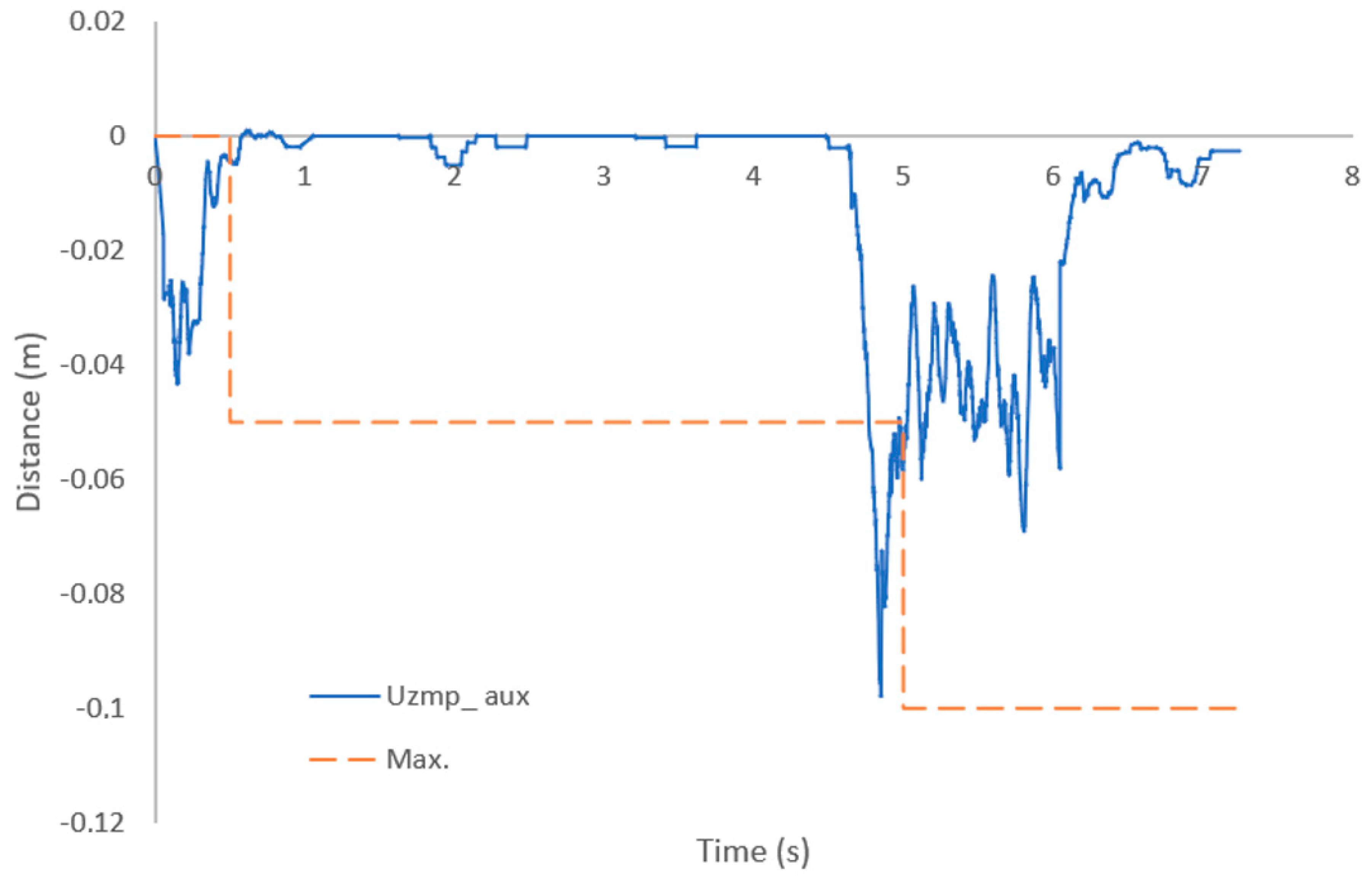
3.2. Reaction Step for Balance Recovery
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Neauman, G. Ocean Currents; Elsevier: New York, NY, USA, 1968. [Google Scholar]
- Duecker, D.A.; Geist, A.R.; Kreuzer, E.; Solowjow, E. Learning Environmental Field Exploration with Computationally Constrained Underwater Robots: Gaussian Processes Meet Stochastic Optimal Control. Sensors 2019, 19, 2094. [Google Scholar] [CrossRef] [PubMed]
- Bonin-Font, F.; Massot-Campos, M.; Negre-Carrasco, P.L.; Oliver-Codina, G.; Beltran, J.P. Inertial Sensor Self-Calibration in a Visually-Aided Navigation Approach for a Micro-AUV. Sensors 2015, 15, 1825–1860. [Google Scholar] [CrossRef] [PubMed]
- Landa-Torres, I.; Manjarres, D.; Bilbao, S.; Del Ser, J. Underwater Robot Task Planning Using Multi-Objective Meta-Heuristics. Sensors 2017, 17, 762. [Google Scholar] [CrossRef] [PubMed]
- Junichi, A.; Mineo, I.; Takashi, N.; Asamu, A. Field test of aquatic walking robot for underwater inspection. In Proceedings of the 7th International Symposium on Automation and Robotics in Construction (ISARC), Bristol, UK, 5 June 1990. [Google Scholar]
- Kang, H.; Shim, H.; Jun, B.H.; Lee, P.M. Design of the underwater link-joint system for the multi-legged underwater robot “CR200”. In Proceedings of the 2012 Oceans—Yeosu, Yeosu, Korea, 21–24 May 2012; pp. 1–6. [Google Scholar]
- Kim, B.; Shim, H.; Seong, Y.; Gyeong, L.; Jun, B.; Lee, P. Control architecture for stable gait of a six-legged subsea robot CR200 2013. In Proceedings of the 2013 OCEANS—San Diego, San Diego, CA, USA, 23–27 September 2013; pp. 1–4. [Google Scholar]
- Jun, B. Preliminary design of the multi-legged underwater walking robot CR200. In Proceedings of the 2012 Oceans—Yeosu, Yeosu, Korea, 21–24 May 2012; pp. 1–4. [Google Scholar]
- Saltaren, R.; Barroso, A.; Yakrangi, O. Robotics for Seabed Teleoperation: Part-1–Conception and Practical Implementation of a Hybrid Seabed Robot. IEEE Access 2018, 6, 60559–60569. [Google Scholar] [CrossRef]
- Kojio, Y.; Karasawa, T.; Kojima, K.; Koyama, R.; Sugai, F.; Nozawa, S.; Inaba, M. Walking control in water considering reaction forces from water for humanoid robots with a waterproof suit. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016. [Google Scholar]
- Calisti, M.; Falotico, E.; Laschi, C. Hopping on Uneven Terrains with an Underwater One-Legged Robot. IEEE Robot. Autom. Lett. 2016, 1, 461–468. [Google Scholar] [CrossRef]
- Picardi, G.; Laschi, C.; Calisti, M. Model-based open loop control of a multigait legged underwater robot. Mechatronics 2018, 55, 162–170. [Google Scholar] [CrossRef]
- Saltarén, R.; Portilla, G.; Barroso, A.; Cely, J. A sensor based on a spherical parallel mechanism for the measurement of fluid velocity: Physical modelling and computational analysis. Sensors 2018, 18, 2867. [Google Scholar] [CrossRef] [PubMed]
- Portilla, G.; Saltarén, R.; Barroso, A.R.; Cely, J.; Yakrangi, O. A Sensor Based on a Spherical Parallel Mechanism for the Measurement of Fluid Velocity: Experimental Development. IEEE Access 2019, 7, 16145–16154. [Google Scholar] [CrossRef]
- Franz, Z. Mechanics of Solids and Fluids; Springer: New York, NY, USA, 2012; pp. 225–256. [Google Scholar]
- Antonelli, G. Underwater Robots; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Fossen, T.I. Marine control system-guidance, navigation and control of ships, rigs and underwater vehicles. Mar. Cybemet. 2002, 1, 74. [Google Scholar]
- Kajita, S.; Kanehiro, F.; Kaneko, K.; Fujiwara, K.; Harada, K.; Yokoi, K.; Hirukawa, H. Biped walking pattern generation by using preview control of zero-moment point. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; pp. 1620–1626. [Google Scholar]
- Feastherstone, R. Rigid Body Dynamics Algorithms; Springer: Sydney, Australia, 2008. [Google Scholar]
- Gehring, C.; Coros, S.; Hutter, M.; Bloesch, M.; Hoepflinger, M.A.; Siegwart, R. Control of dynamic gaits for a quadrupedal robot. In Proceedings of the 2013 IEEE international conference on Robotics and automation, Karlsruhe, Germany, 6–10 May 2013; pp. 3287–3292. [Google Scholar]
- Ogata, K. Ingeniería de Control Moderna, 5th ed.; Pearson Educación: Madrid, Spain, 2010. [Google Scholar]
- Jelali, M.; Kroll, A. Hydraulic Servo-Systems: Modelling, Identification and Control; Springer Science & Business: London, UK, 2012. [Google Scholar]
- Konami, S.; Nishiumi, T. Hydraulic Control Systems; World Scientific Publishing Company: Singapore, 2016. [Google Scholar]
- Raibert, M. Legged Robots that Balance; MIT Press: Cambridge, MA, USA, 1986. [Google Scholar]
- Sreenath, K.; Park, H.; Poulakakis, I.; Grizzle, J. A compliant hybrid zero dynamics controller for stable, efficient and fast bipedal walking on MABEL. Int. J. Robot. Res. 2011, 30, 1170–1193. [Google Scholar] [CrossRef]
- Ramezani, A.; Hurst, J.; Hamed, K.; Grizzle, J. Performance analysis and feedback control of ATRIAS, a three-dimensional bipedal robot. J. Dyn. Syst. 2014, 136, 021012. [Google Scholar] [CrossRef]
- Chevallereau, C.; Abba, G.; Aoustin, Y.; Plestan, F.; Westervelt, E.; Wit, C.; Grizzle, J. Rabbit: A Testbed for Advanced Control Theory. IEEE Control Syst. Mag. 2003, 23, 57–79. [Google Scholar]
- Gough, V.; Whitehall, S. Universal Tyre Testing Machine; International Technical Congress FISITA: London, UK, 1962. [Google Scholar]
- Stewart, D. Platform with six degrees of freedom. Proc. Inst. Mech. Eng. 1965, 180, 371–386. [Google Scholar] [CrossRef]
- Gosselin, C.; Angeles, J. The optimum kinematic design of a spherical three-degree-of-freedom parallel manipulator. J. Mech. Transm. Autom. 1989, 111, 202–207. [Google Scholar] [CrossRef]
- Merlet, J. Parallel Robots, 2nd ed.; Springer: Dordrecht, The Nertherlands, 2006. [Google Scholar]
- Korotkin, A.I. Added Masses of Ship Structures; Springer Science & Business: Petersburg, Russia, 2008. [Google Scholar]
- Eng, Y.; Lau, W.; Low, E. Identification of the hydrodynamics coefficients of an underwater vehicle using free decay pendulum motion. In Proceedings of the International MultiConference of Engineers and Computer Scientists, Hong Kong, China, 19–21 March 2008. [Google Scholar]
- Ross, A.; Fossen, T.; Johansen, T. Identification of underwater vehicle hydrodynamic coefficients using free decay tests. IFAC Proc. Vol. 2004, 37, 363–368. [Google Scholar] [CrossRef]
- Morrison, A.; Yoerger, D. Determination of the hydrodynamic parameters of an underwater vehicle during small scale, nonuniform, 1-dimensional translation. In Proceedings of the OCEANS, Victoria, BC, Canada, 18–21 October 1993; p. II277. [Google Scholar]
- Sumer, B.M.; Fredsoe, J. Hydrodynamics around Cylindrical Structures; World Scientific Publishing: Singapore, 1997. [Google Scholar]
- Thomson, W.T. Theory of Vibration with Applications; CRC Press: New York, NY, USA, 1993. [Google Scholar]
- Do, K.D.; Pan, J. Control of Ships and Underwater Vehicles: Design for Underactuated and Nonlinear Marine Systems; Springer Science & Business: London, UK, 2009. [Google Scholar]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Alexander, R. The gaits of bipedal and quadrupedal animals. Int. J. Robot. Res. 1984, 3, 49–59. [Google Scholar] [CrossRef]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| body | m (kg) | m’ (kg) | m + m’ (kg) |
|---|---|---|---|
| Hip | 4 | 4.2 | 8.2 |
| Leg1 | 0.7 | 0.186 | 0.886 |
| Leg2 | 0.7 | 0.186 | 0.886 |
| axes | 0.5 | 0.079 | 0.579 |
| sum | 10.551 |
| Constants | |
|---|---|
| z | 0.7 m |
| 4 kg | |
| 4.2 kg | |
| g | 9.8 m/s2 |
| 0.7 | |
| MPC | Prediction control = 90, Control horizon = 20 |
| 0.02 m/s | |
| 0.8 | |
| PI | Q1 (0.04, 300); Q2 (0.04, 300); L1 (0.05, 150); L2 (0.05, 150) |
| kp | Q1 (−0.15); Q2 (−0.15); L1 (−0.1); L2 (−0.1) |
| K | 120 N/m |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Portilla, G.; Saltarén, R.; Montero de Espinosa, F.; R. Barroso, A.; Cely, J.; Yakrangi, O. Dynamic Walking of a Legged Robot in Underwater Environments. Sensors 2019, 19, 3588. https://doi.org/10.3390/s19163588
Portilla G, Saltarén R, Montero de Espinosa F, R. Barroso A, Cely J, Yakrangi O. Dynamic Walking of a Legged Robot in Underwater Environments. Sensors. 2019; 19(16):3588. https://doi.org/10.3390/s19163588
Chicago/Turabian StylePortilla, Gerardo, Roque Saltarén, Francisco Montero de Espinosa, Alejandro R. Barroso, Juan Cely, and Oz Yakrangi. 2019. "Dynamic Walking of a Legged Robot in Underwater Environments" Sensors 19, no. 16: 3588. https://doi.org/10.3390/s19163588
APA StylePortilla, G., Saltarén, R., Montero de Espinosa, F., R. Barroso, A., Cely, J., & Yakrangi, O. (2019). Dynamic Walking of a Legged Robot in Underwater Environments. Sensors, 19(16), 3588. https://doi.org/10.3390/s19163588