Evaluation of Soil Moisture and Shear Deformation Based on Compression Wave Velocities in a Shallow Slope Surface Layer

 ,
, 
Abstract
1. Introduction
2. Testing Apparatus and Devices
3. Methods
3.1. Elastic Wave Velocities
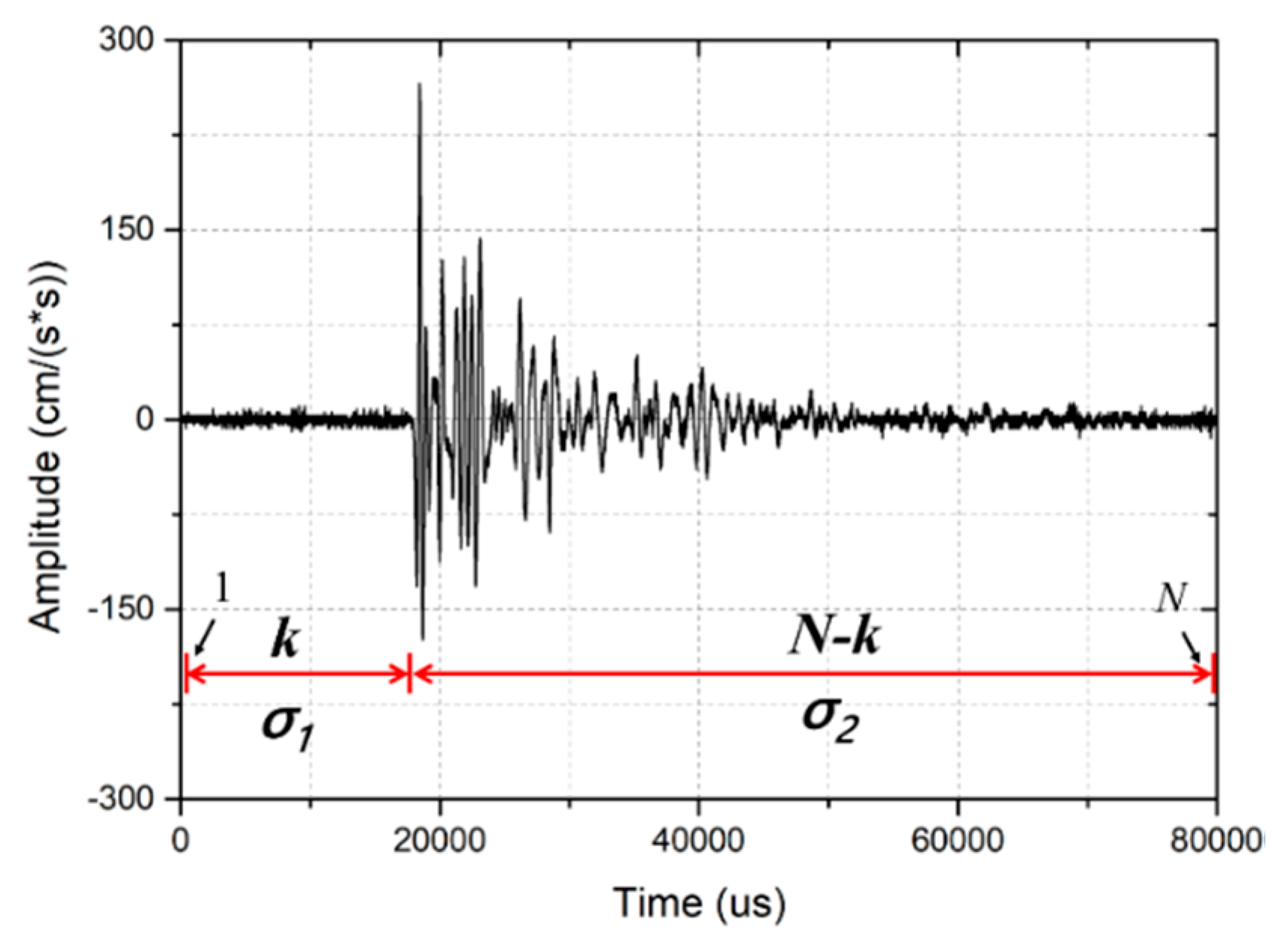
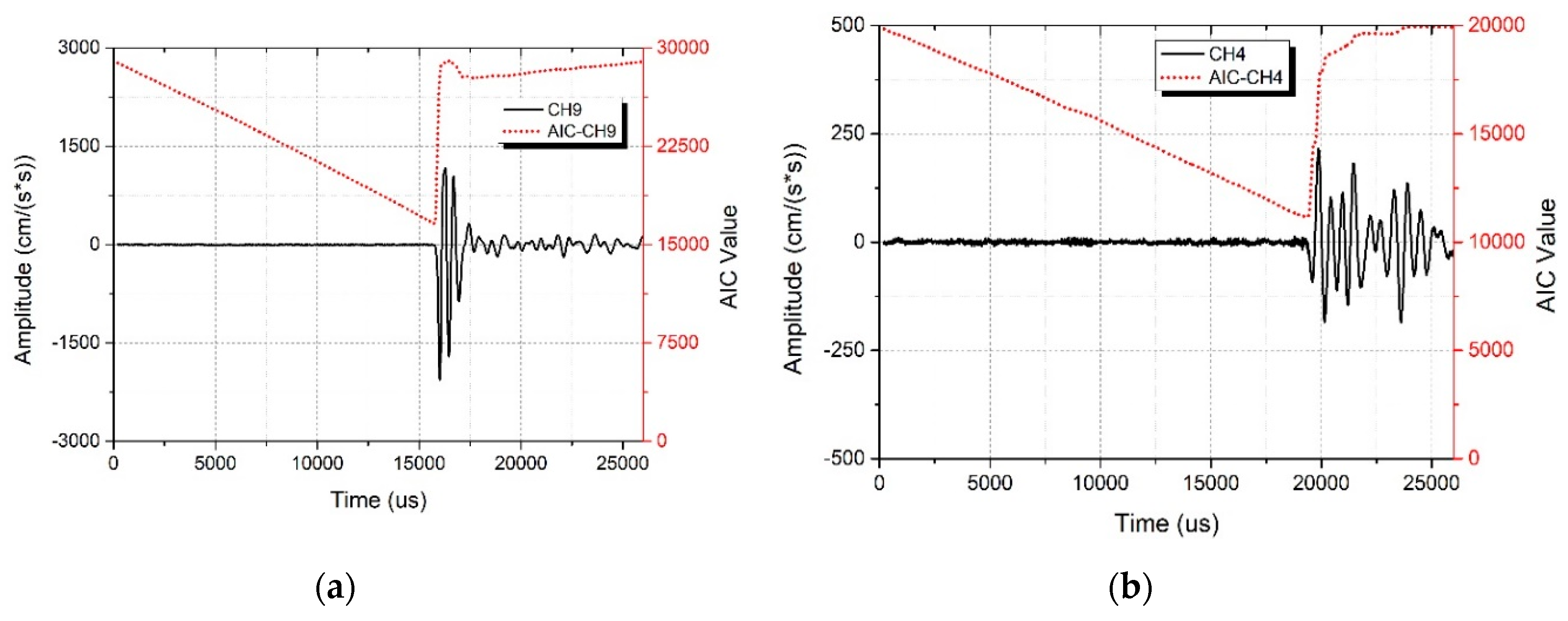
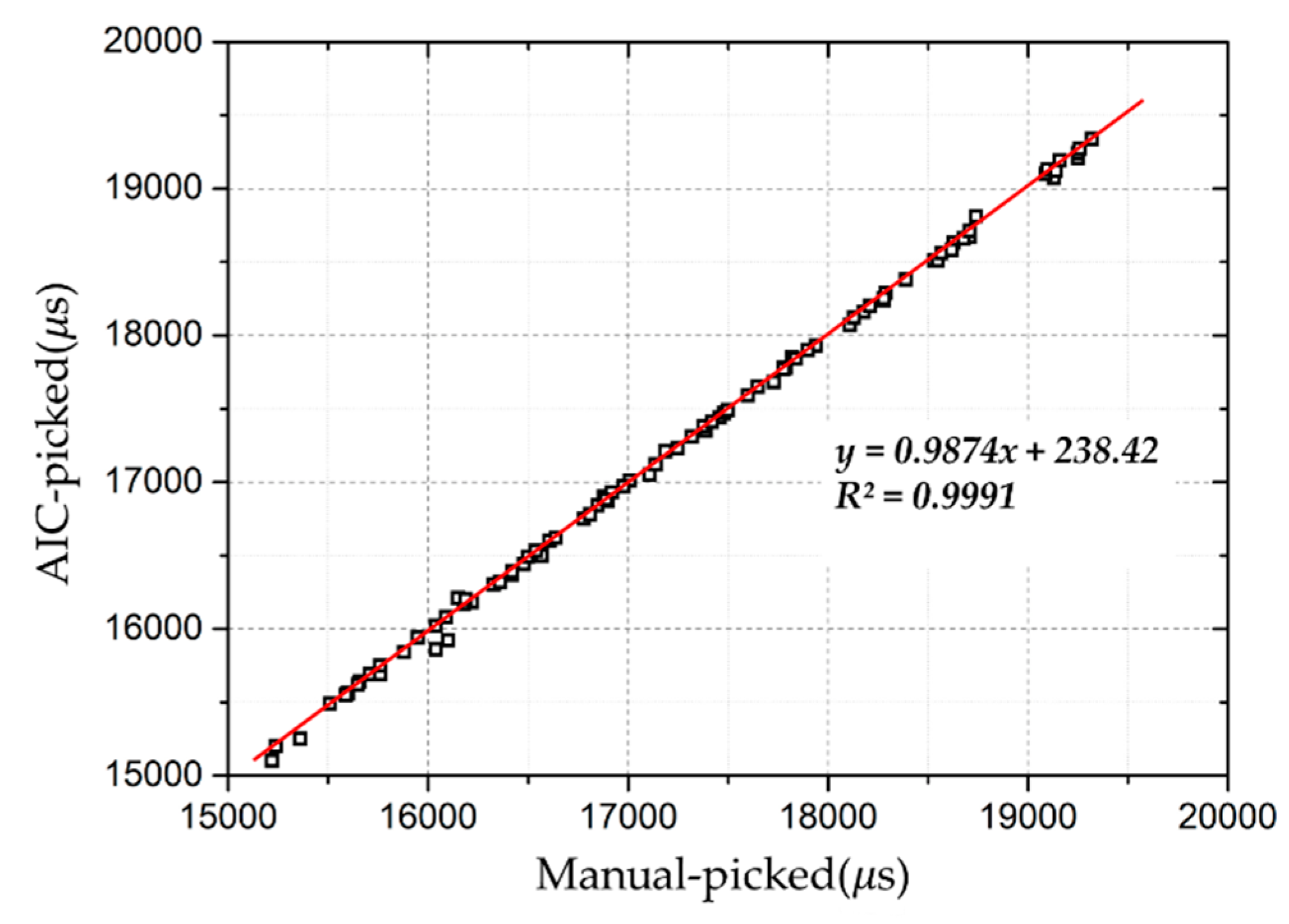
3.2. Automatic Travel Time Picking
4. Test Material and Test Procedure
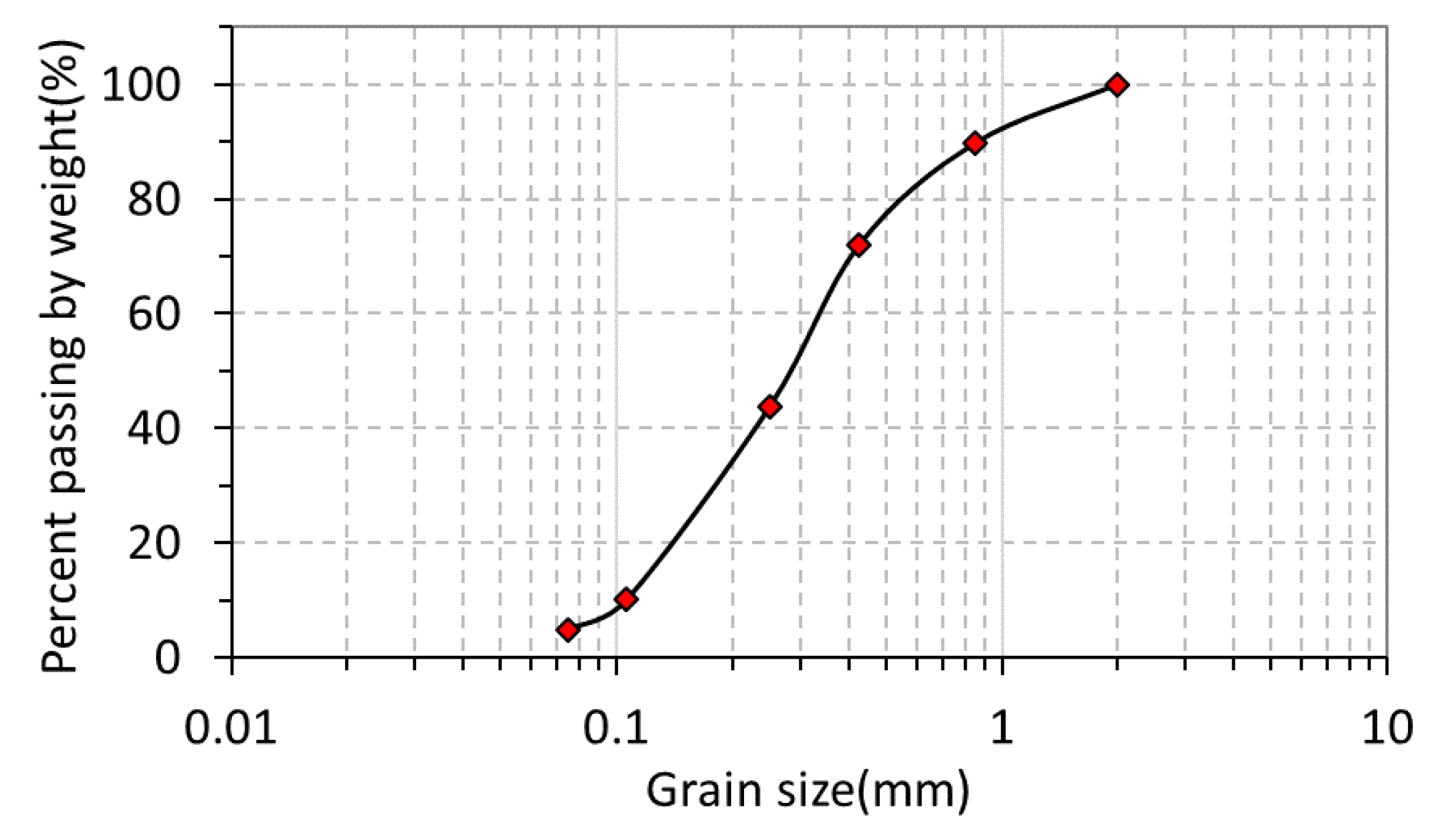
4.1. Test Material
4.2. Calibration of Soil Moisture Sensors
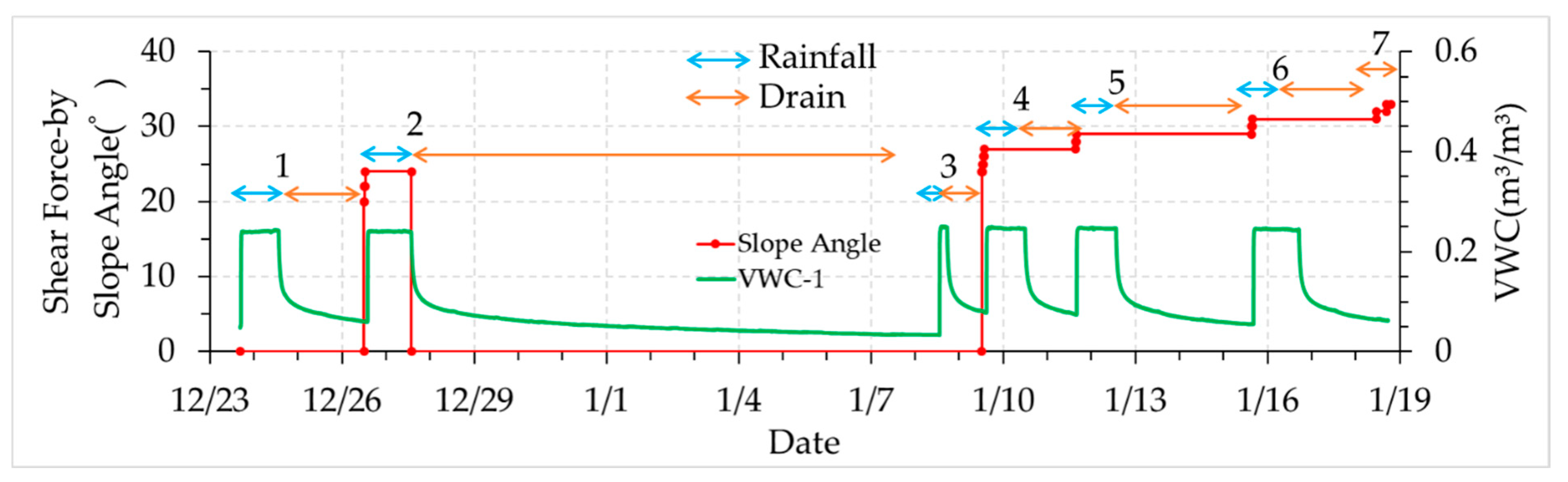
4.3. Test Cases and Conditions
5. Results and Discussions
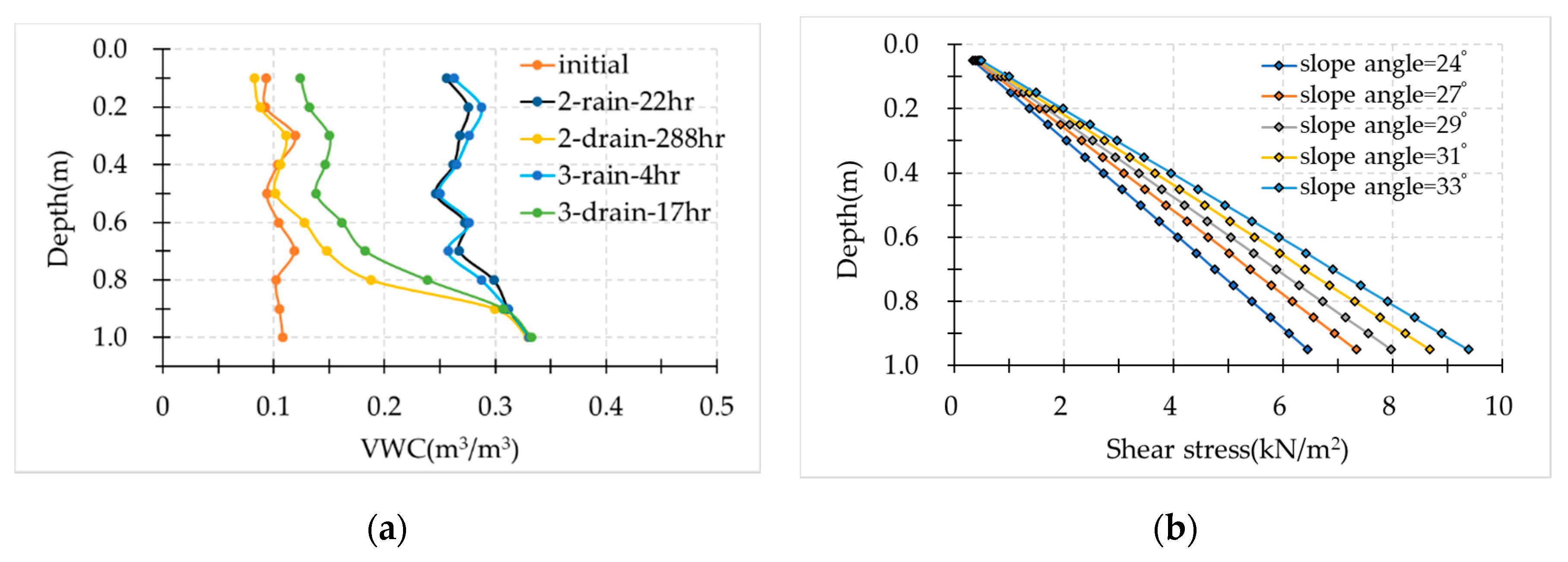
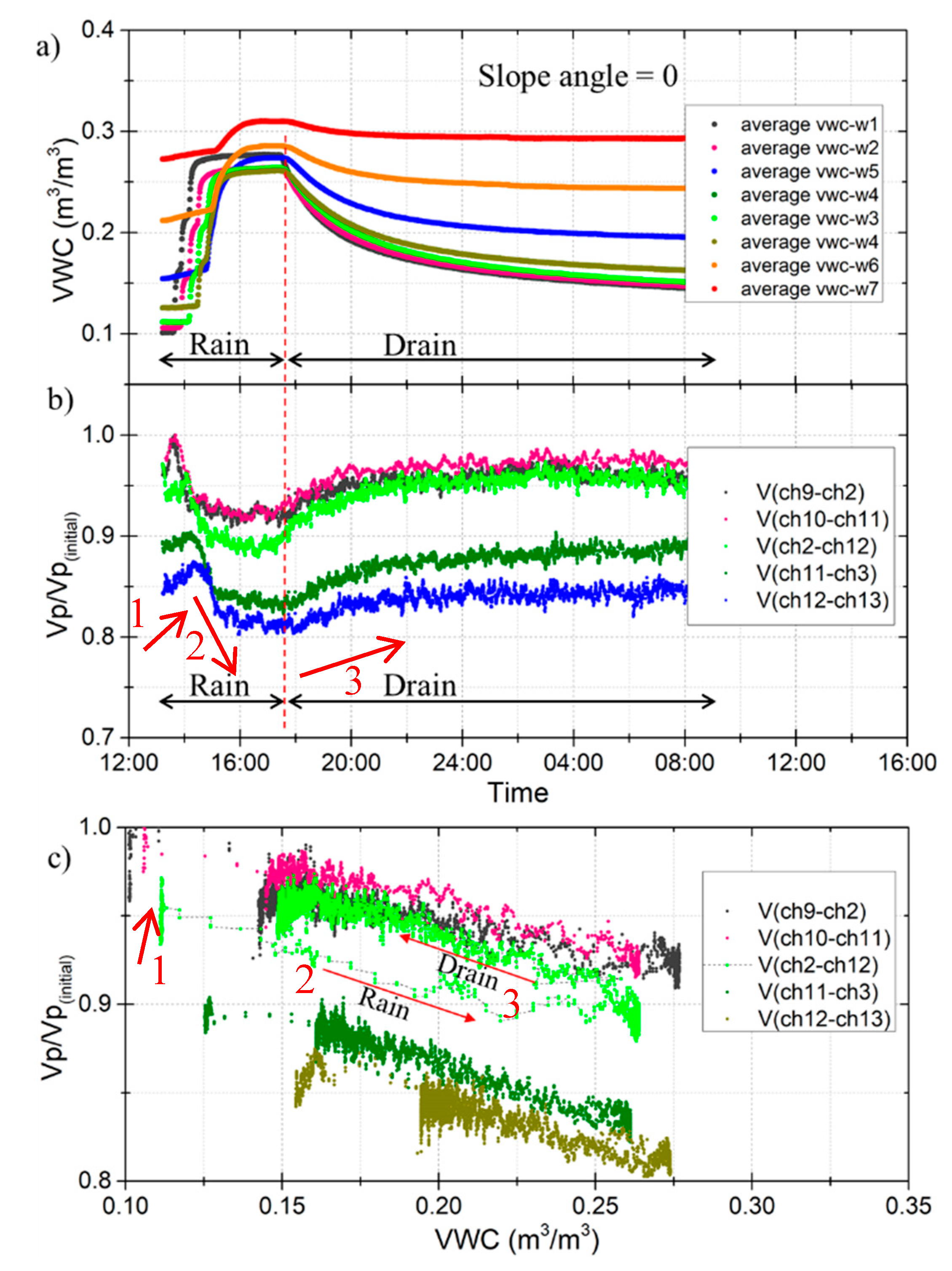
5.1. The Effects of Soil Moisture on Elastic Wave Velocities without Shear Force
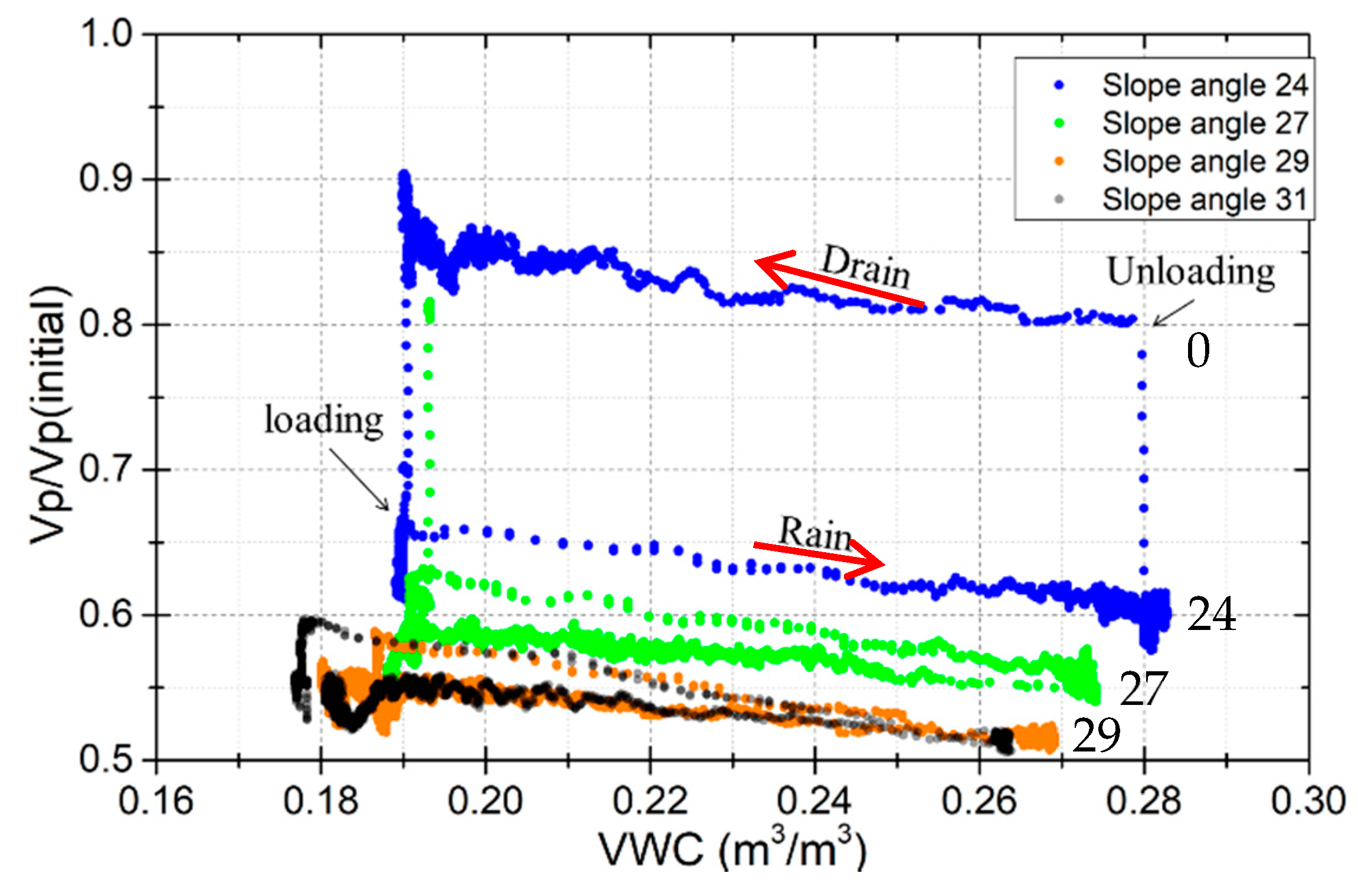
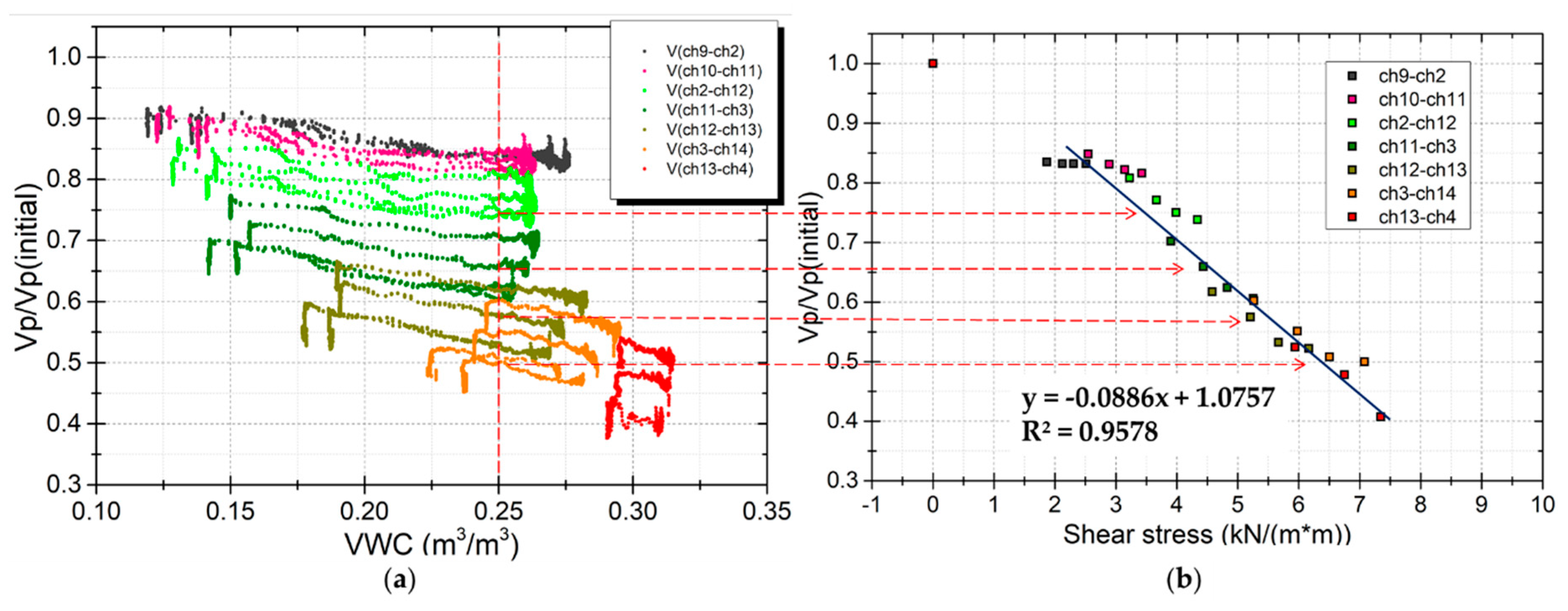
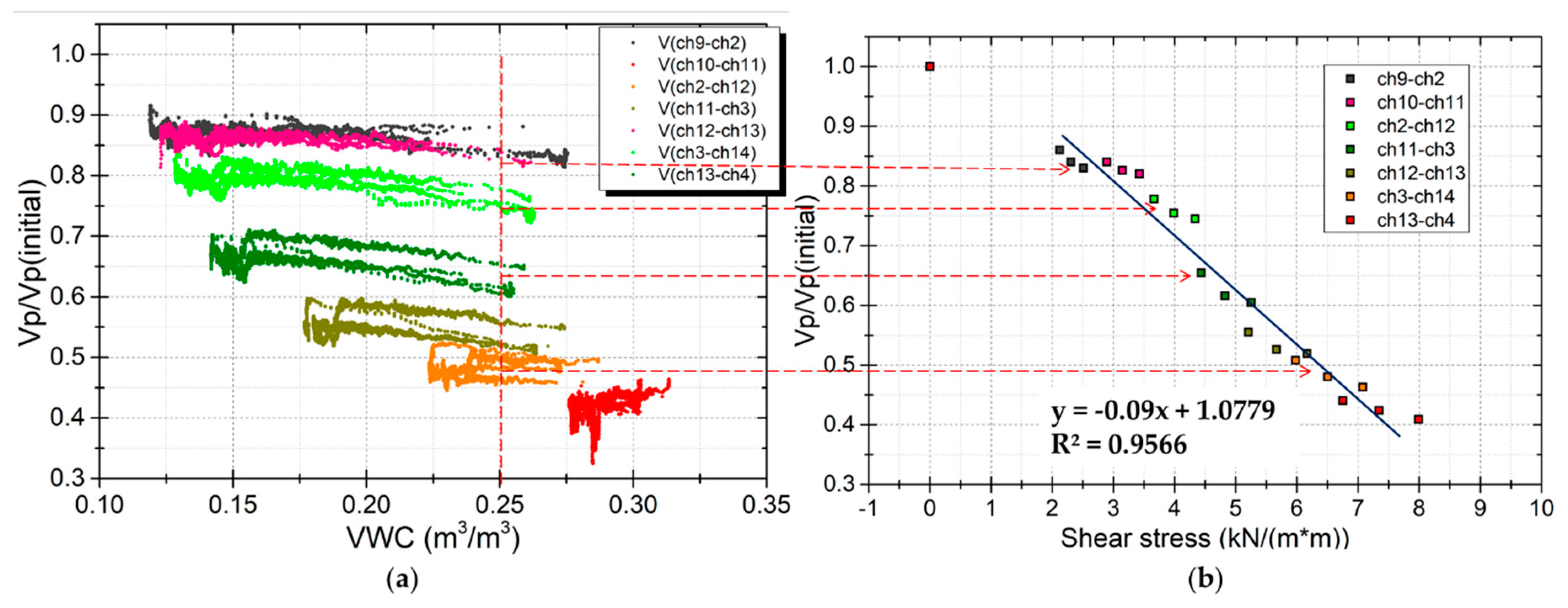
5.2. The Effects of Shear Stress on Elastic Wave Velocities
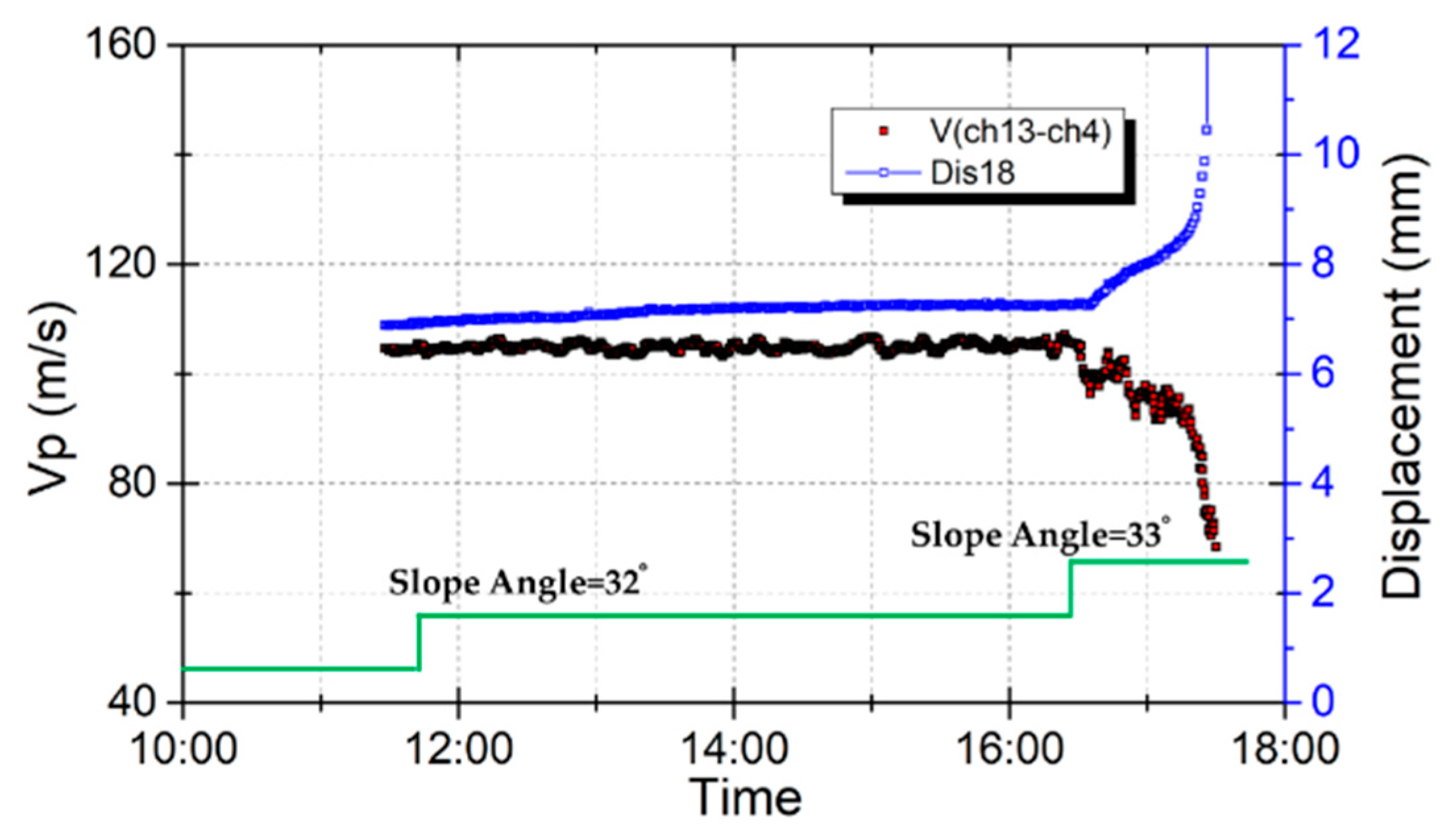
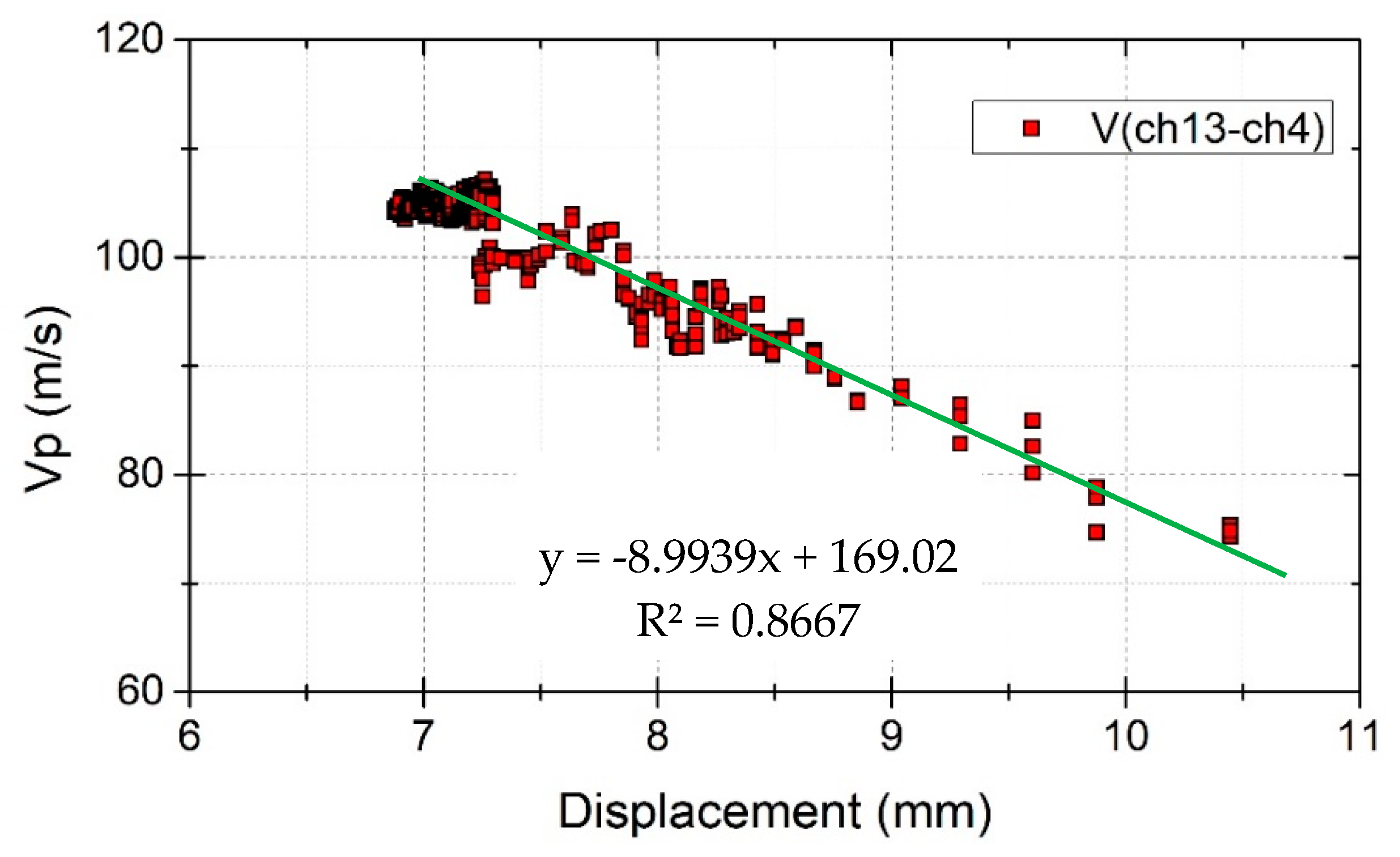
5.3. Elastic Wave Velocities and Shear Displacement
6. Conclusions
- (1)
- Effects of soil moisture on elastic wave velocities. The wave velocities decreased with increasing soil moisture in the rain event and increased during the drain stage. The wave velocity ratio reduced by 0.1–0.2 when the volume of water content increased from 0.1 to 0.27 m3/m3.
- (2)
- Effects of shear stress on elastic wave velocities. The stronger the shear force applied, the lower the velocities observed. When loading a shear stress corresponding to slope angles of 24, 27, 29, and 31 degrees, a drop in wave velocity of 0.2–0.3 was observed at the middle layer, and near 0.5 at the bottom layer.
- (3)
- Effects of shear displacement on elastic wave velocities. Increasing the displacement caused the wave velocities to also increase. The wave velocity ratio dropped by 0.2 after 3 mm of displacement.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Brand, E.W. Some thoughts on rain-induced slope failures. Proc. Int. Conf. Soil Mech. Found. Eng. 1981, 3, 373–376. [Google Scholar]
- Baum, R.L.; Godt, J.W. Early warning of rainfall-induced shallow landslides and debris flows in the USA. Landslides 2010, 7, 259–272. [Google Scholar] [CrossRef]
- Peruccacci, S.; Brunetti, M.T.; Gariano, S.L.; Melillo, M. Geomorphology Rainfall thresholds for possible landslide occurrence in Italy. Geomorphology 2017, 290, 39–57. [Google Scholar] [CrossRef]
- Uchimura, T.; Towhata, I.; Wang, L.; Nishie, S.; Yamaguchi, H.; Seko, I.; Qiao, J. Precaution and early warning of surface failure of slopes using tilt sensors. Soils Found. 2015, 55, 1086–1099. [Google Scholar] [CrossRef]
- Popescu, M.E.; Sasahara, K. Engineering Measures for Landslide Disaster Mitigation. In Landslides – Disaster Risk Reduction; Springer: Berlin/Heidelberg, Germany, 2008; pp. 609–631. [Google Scholar]
- Conte, E.; Troncone, A.; Vena, M. A method for the design of embedded cantilever retaining walls under static and seismic loading. Géotechnique 2017, 67, 1081–1089. [Google Scholar] [CrossRef]
- Hutchinson, J.N. Landslides in Britain and their countermeasures. Landslides 1984, 21, 1–25. [Google Scholar] [CrossRef]
- Conte, E.; Troncone, A. A performance-based method for the design of drainage trenches used to stabilize slopes. Eng. Geol. 2018, 239, 158–166. [Google Scholar] [CrossRef]
- Arnhardt, C.; Asch, K.; Azzam, R.; Bill, R.; Fernandez-Steeger, T.M.; Homfeld, S.D.; Kallash, A.; Niemeyer, F.; Ritter, H.; Toloczyki, M.; et al. Sensor Based Landslide Early Warning System—SLEWS—Development of a geoservice infrastructure as basis for early warning systems for landslides by integration of real-time sensors. In Proceedings of the Kick-Off-Meeting, Karlsruhe, Germany, 10 October 2007; pp. 75–88. [Google Scholar]
- Lollino, G.; Arattano, M.; Cuccureddu, M. The use of the automatic inclinometric system for landslide early warning: The case of Cabella Ligure (North-Western Italy). Phys. Chem. Earth 2002, 27, 1545–1550. [Google Scholar] [CrossRef]
- Angeli, M.G.; Pasuto, A.; Silvano, S. A critical review of landslide monitoring experiences. Eng. Geol. 2000, 55, 133–147. [Google Scholar] [CrossRef]
- Uchimura, T.; Towhata, I.; Anh, T.T.L.; Fukuda, J.; Bautista, C.J.B.; Wang, L.; Seko, I.; Uchida, T.; Matsuoka, A.; Ito, Y.; et al. Simple monitoring method for precaution of landslides watching tilting and water contents on slopes surface. Landslides 2010, 7, 351–357. [Google Scholar] [CrossRef]
- Wang, L.; Nishie, S.; Su, L.; Yamaguchi, H.; Yamamoto, S.; Uchimura, T.; Tao, S.N. An early warning monitoring of Earthquake-induced slope failures by monitoring inclination changes in multi-point tilt sensors. Lowland Technol. Int. 2018, 19, 251–256. [Google Scholar]
- Brignoli, E.G.M.; Gotti, M.; Stokoe, K.H. Measurement of shear waves in laboratory specimens by means of piezoelectric transducers. Geotech. Test. J. 1996, 19, 384–397. [Google Scholar]
- Irfan, M.; Uchimura, T. Modified triaxial apparatus for determination of elastic wave velocities during infiltration tests on unsaturated soils. KSCE J. Civ. Eng. 2016, 20, 197–207. [Google Scholar] [CrossRef]
- Irfan, M.; Uchimura, T.; Chen, Y. Effects of soil deformation and saturation on elastic wave velocities in relation to prediction of rain-induced landslides. Eng. Geol. 2017, 230, 84–94. [Google Scholar] [CrossRef]
- Chen, Y.; Uchimura, T.; Irfan, M.; Huang, D.; Xie, J. Detection of water infiltration and deformation of unsaturated soils by elastic wave velocity. Landslides 2017, 14, 1715–1730. [Google Scholar] [CrossRef]
- Nobutomo, O.; Yoko, T.; Kazuya, A.; Tomoaki, M. Realty of Cliff Failure Disaster; NILIM: Tsukuba, Japan, 2009; ISSN 1346-7328. [Google Scholar]
- Steven, L.K. Geotechnical Earthquake Engineering; Pearson: London, UK, 1996; ISBN 0133749436. [Google Scholar]
- Stewart, S.W. Real-time detection and location of local seismic events in central California. Bull. Seismol. Soc. Am. 1977, 67, 433–452. [Google Scholar]
- Morita, Y.G. Automatic Detection of Onset Time of Seismic Waves and its Confidence Interval Using the Autoregressive Model Fitting. J-STAGE 1984, 2, 281–293. [Google Scholar]
- Kurz, J.H.; Grosse, C.U.; Reinhardt, H.W. Strategies for reliable automatic onset time picking of acoustic emissions and of ultrasound signals in concrete. Ultrasonics 2005, 43, 538–546. [Google Scholar] [CrossRef]
- Maeda, N. A Method for Reading and Checking Phase Time in Auto-Processing System of Seismic Wave Data. Zisin J. Seismol. Soc. Japan 2nd Ser. 1985, 38, 365–379. [Google Scholar]
- Takanami, T.; Kitagawa, G. Estimation of the arrival times of seismic waves by multivariate time series model. Ann. Inst. Stat. Math. 1991, 43, 407–433. [Google Scholar] [CrossRef]
- Cobos, D.; Chambers, C. Calibrating ECH2O Soil Moisture Sensors; Application Note; Decagon Devices: Pullman, WA, USA, 2005; pp. 1–5. [Google Scholar]
- Czarnomski, N.M.; Moore, G.W.; Pypker, T.G.; Licata, J.; Bond, B.J. Precision and accuracy of three alternative instruments for measuring soil water content in two forest soils of the Pacific Northwest. Can. J. For. Res. 2005, 1876, 1867–1876. [Google Scholar] [CrossRef]
- Chen, Y.; Irfan, M.; Uchimura, T.; Cheng, G.; Nie, W. Elastic wave velocity monitoring as an emerging technique for rainfall-induced landslide prediction. Landslides 2018, 15, 1155–1172. [Google Scholar] [CrossRef]
- Sasahara, K.; Sakai, N. Development of shear deformation due to the increase of pore pressure in a sandy model slope during rainfall. Eng. Geol. 2014, 170, 43–51. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Case | Soil Moisture Control | Shear Force (Slope Angle) | Shear Displacement Observed (mm) |
|---|---|---|---|
| 1-1 | Rainfall (21 h) | 0° | 0 |
| 1-2 | Drain (46 h) | 0° | 0 |
| 2-1 | Rainfall (24 h) | 24° | 0 |
| 2-2 | Drain (288 h) | 0° | 0 |
| 3-1 | Rainfall (4 h) | 0° | 0 |
| 3-2 | Drain (19 h) | 0° | 0 |
| 4-1 | Rainfall (24 h) | 27° | 0 |
| 4-2 | Drain (28 h) | 27° | 0 |
| 5-1 | Rainfall (22 h) | 29° | 0 |
| 5-2 | Drain (70 h) | 29° | 0 |
| 6-1 | Rainfall (23 h) | 31° | 0 |
| 6-2 | Drain (41 h) | 31° | 0 |
| 7 | Constant | 32°, 33° | 50 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tao, S.; Uchimura, T.; Fukuhara, M.; Tang, J.; Chen, Y.; Huang, D. Evaluation of Soil Moisture and Shear Deformation Based on Compression Wave Velocities in a Shallow Slope Surface Layer. Sensors 2019, 19, 3406. https://doi.org/10.3390/s19153406
Tao S, Uchimura T, Fukuhara M, Tang J, Chen Y, Huang D. Evaluation of Soil Moisture and Shear Deformation Based on Compression Wave Velocities in a Shallow Slope Surface Layer. Sensors. 2019; 19(15):3406. https://doi.org/10.3390/s19153406
Chicago/Turabian StyleTao, Shangning, Taro Uchimura, Makoto Fukuhara, Junfeng Tang, Yulong Chen, and Dong Huang. 2019. "Evaluation of Soil Moisture and Shear Deformation Based on Compression Wave Velocities in a Shallow Slope Surface Layer" Sensors 19, no. 15: 3406. https://doi.org/10.3390/s19153406
APA StyleTao, S., Uchimura, T., Fukuhara, M., Tang, J., Chen, Y., & Huang, D. (2019). Evaluation of Soil Moisture and Shear Deformation Based on Compression Wave Velocities in a Shallow Slope Surface Layer. Sensors, 19(15), 3406. https://doi.org/10.3390/s19153406