IoT Enabled Intelligent Sensor Node for Smart City: Pedestrian Counting and Ambient Monitoring

 ,
, 
Abstract
1. Introduction
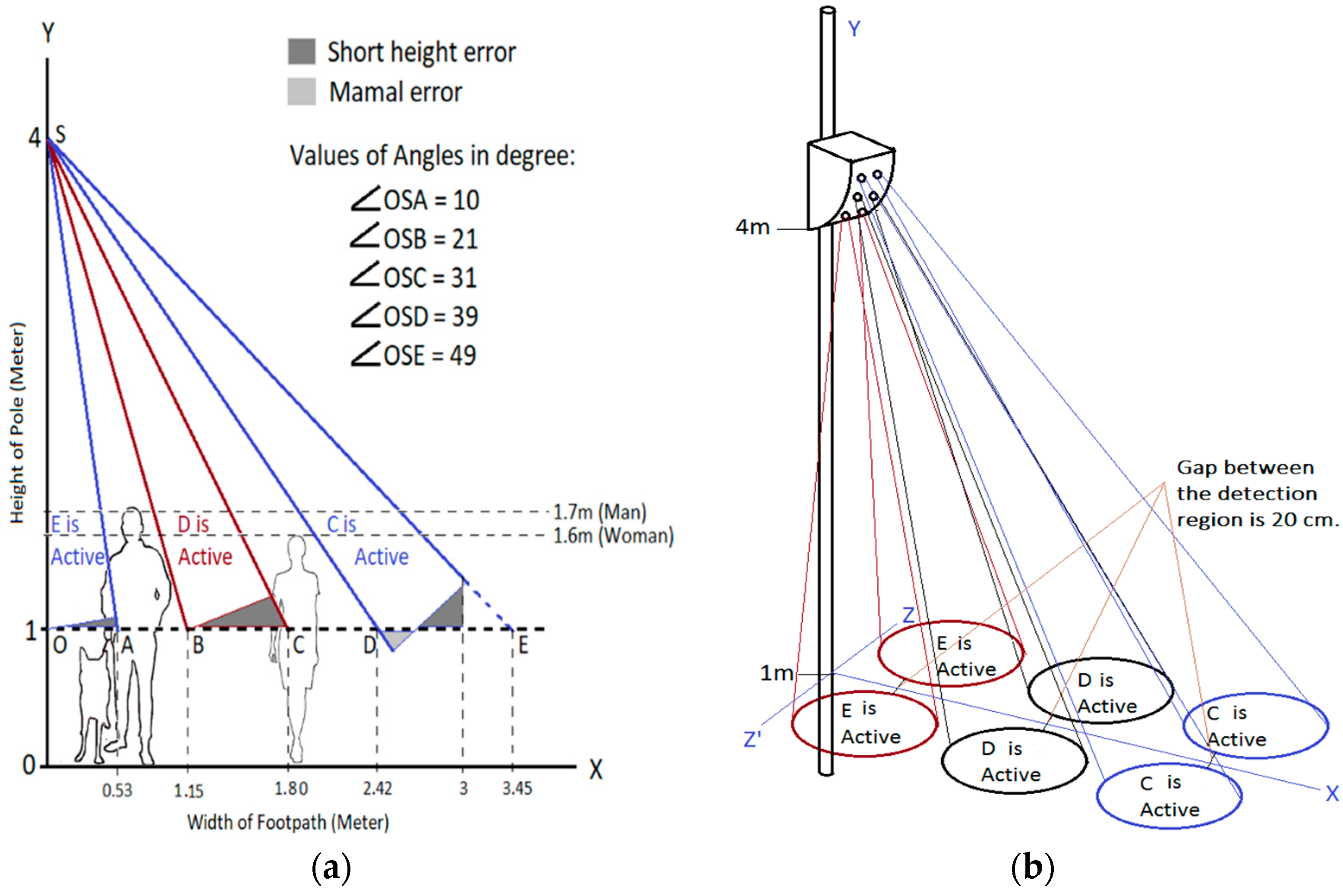
- The sensitivity of the PIR sensors has been tuned, and a specific section from the Fresnel lens is chosen for receiving the IR emission from 1 m above the ground. Therefore, domestic animals such as dogs or cats will not be detected while crossing the footpath as the maximum shoulder height of a domestic dog is less than 100 cm [37].
- A novel method of the pedestrian count and direction detection system has been designed. Three PIR sensors cover the detection region across the width of footpath in such a way that the detection regions of the sensors do not overlap. Each of the three sensors is horizontally paired with another three sensors such that each pair can validate their detection as well as find the direction of travel of the pedestrian. Therefore, the system can provide highly accurate results, up to 95% compared to manual counting.
- A microcontroller-based low-power sensing device along with the low-power communication system has been proposed to increase the battery life. The system can be installed on the street pole without altering the other infrastructure of the city.
2. Materials and Methods
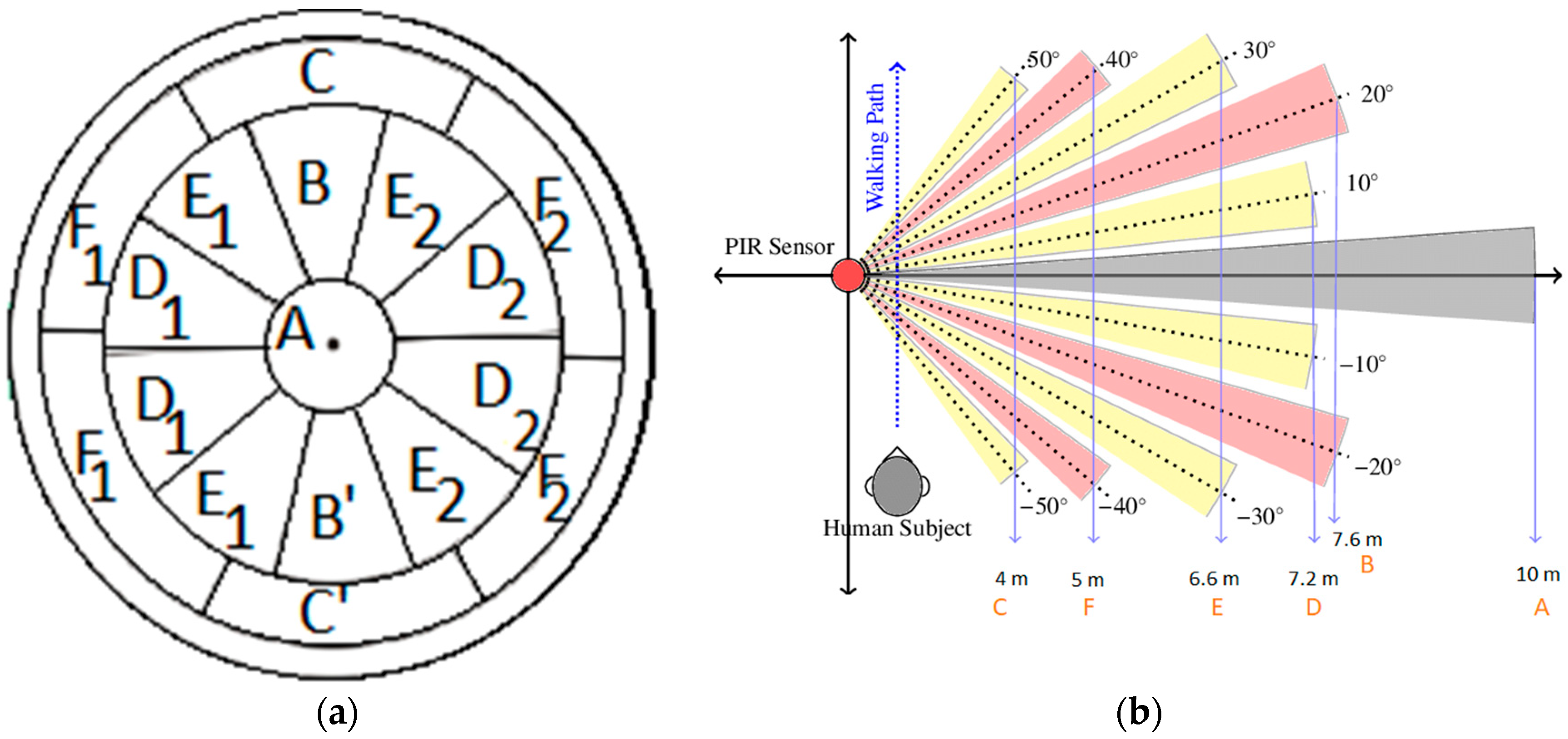
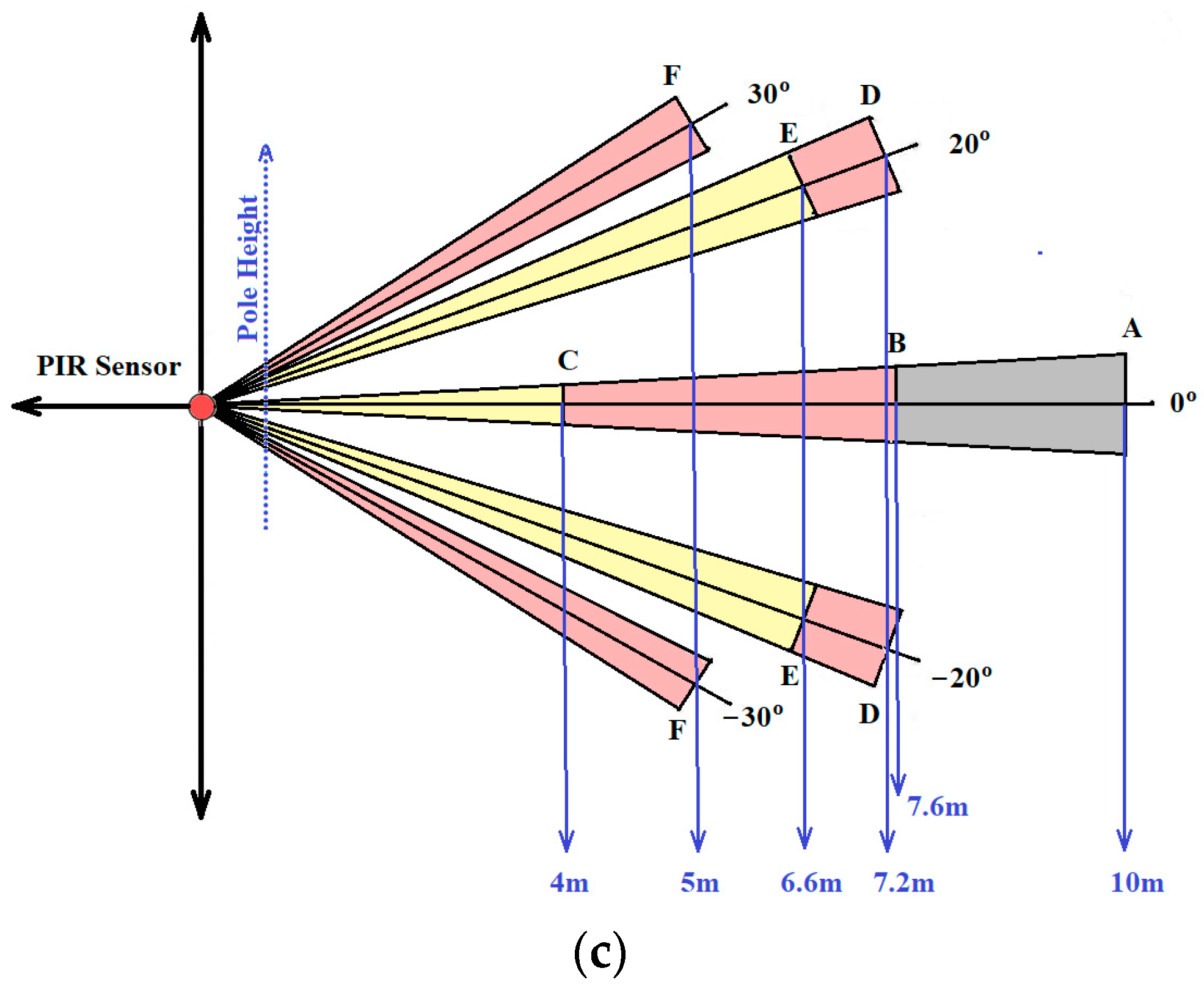
2.1. Field of View for PIR Sensor
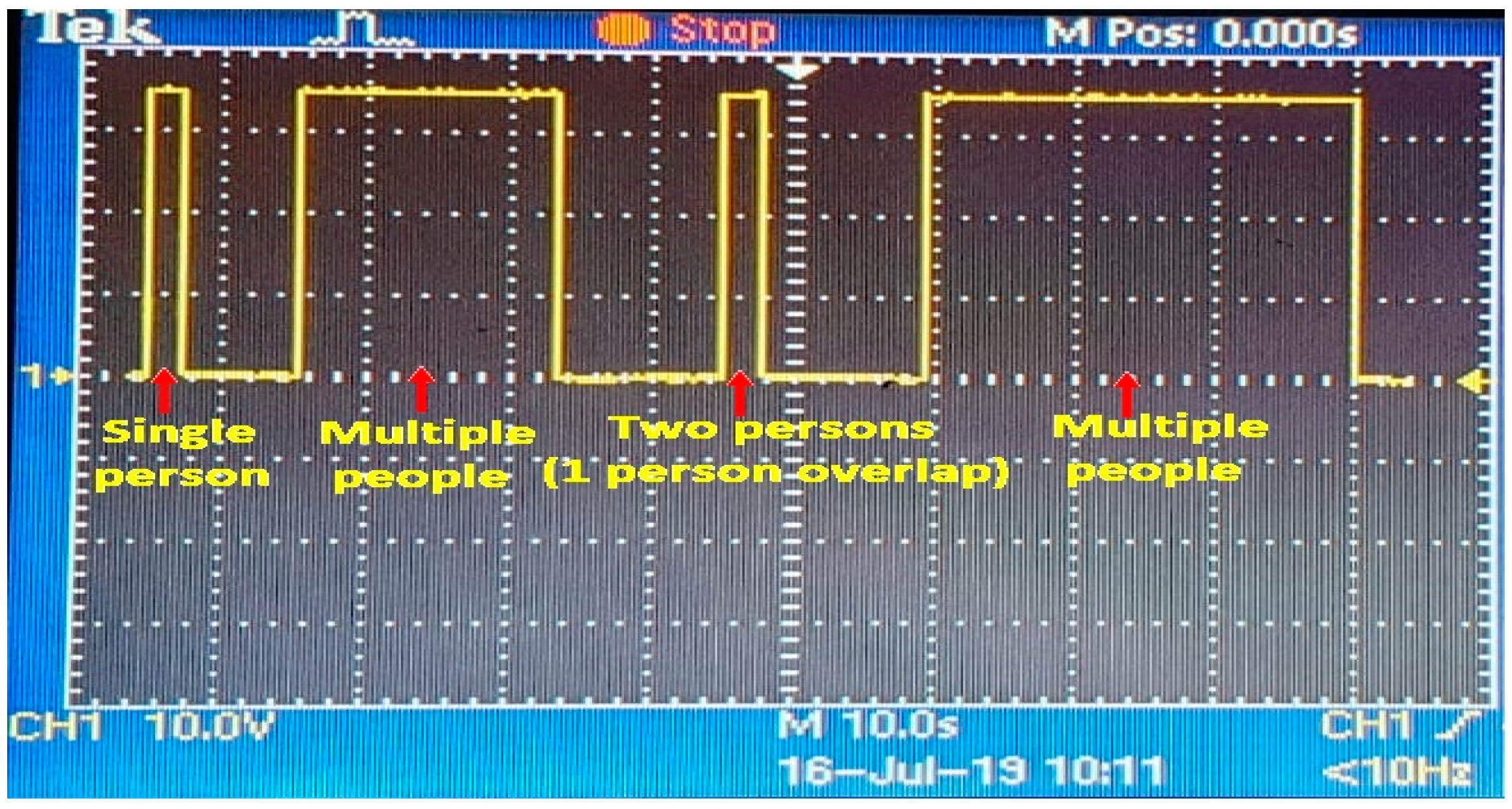
2.2. Method for Pedestrian Detection
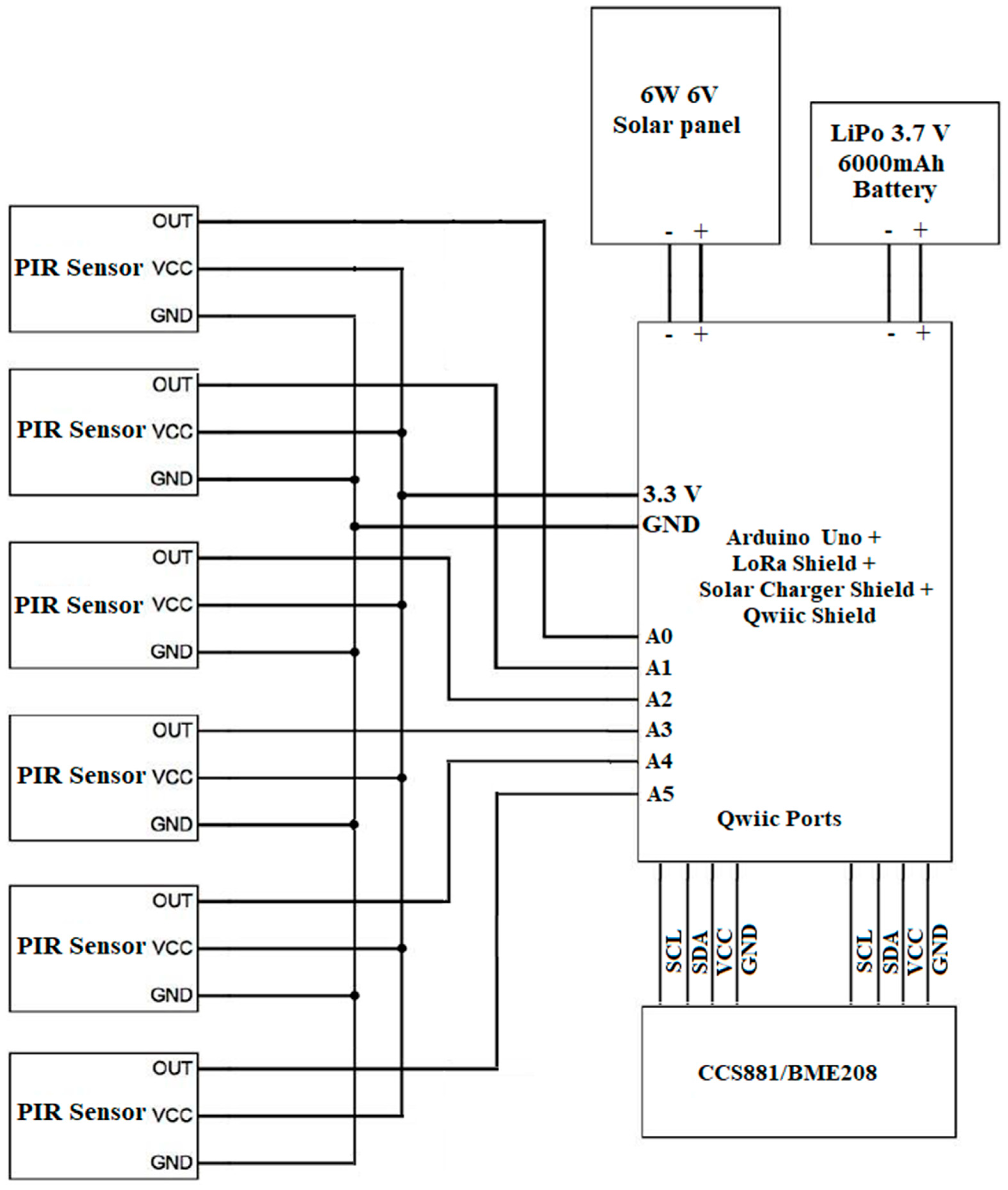
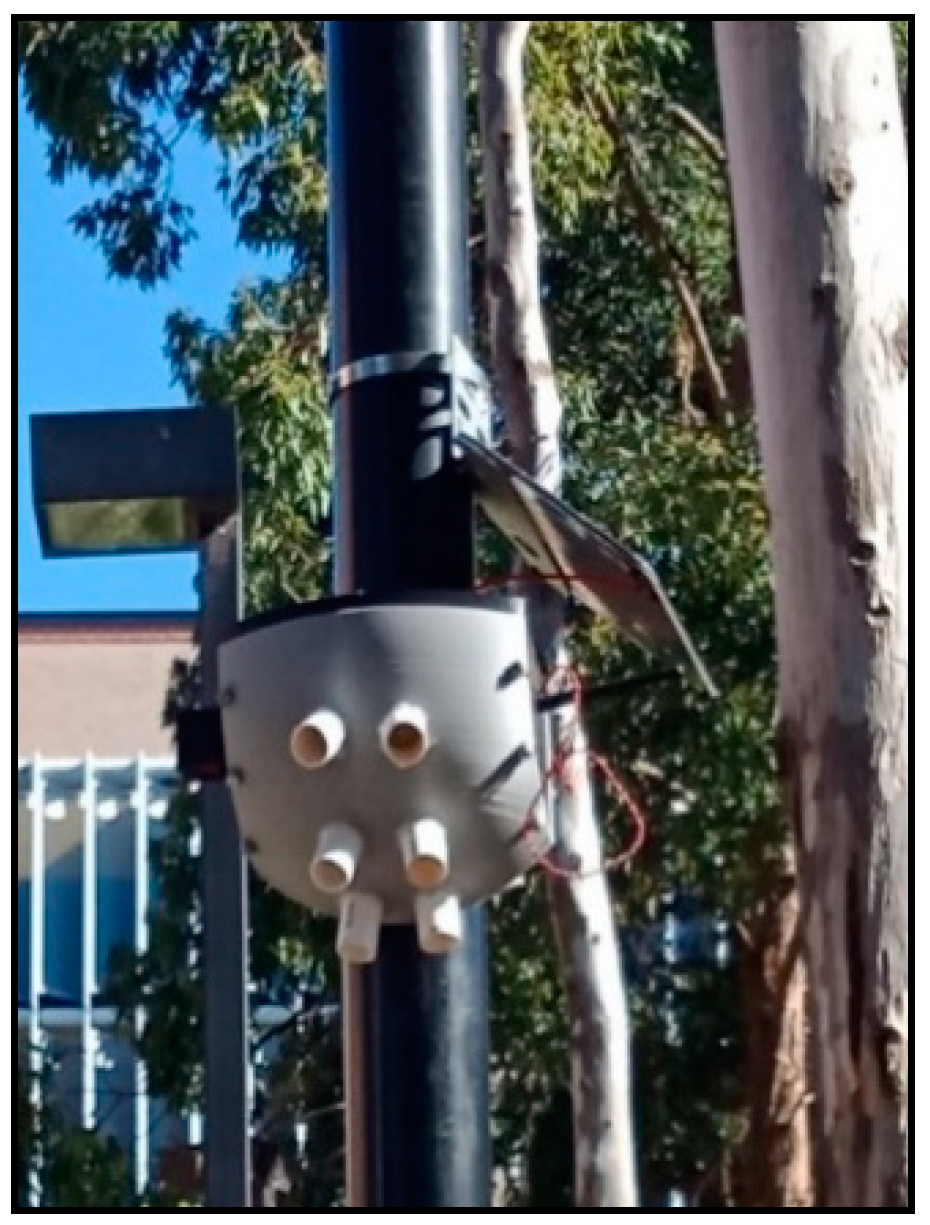
2.3. Development of the Sensor Node
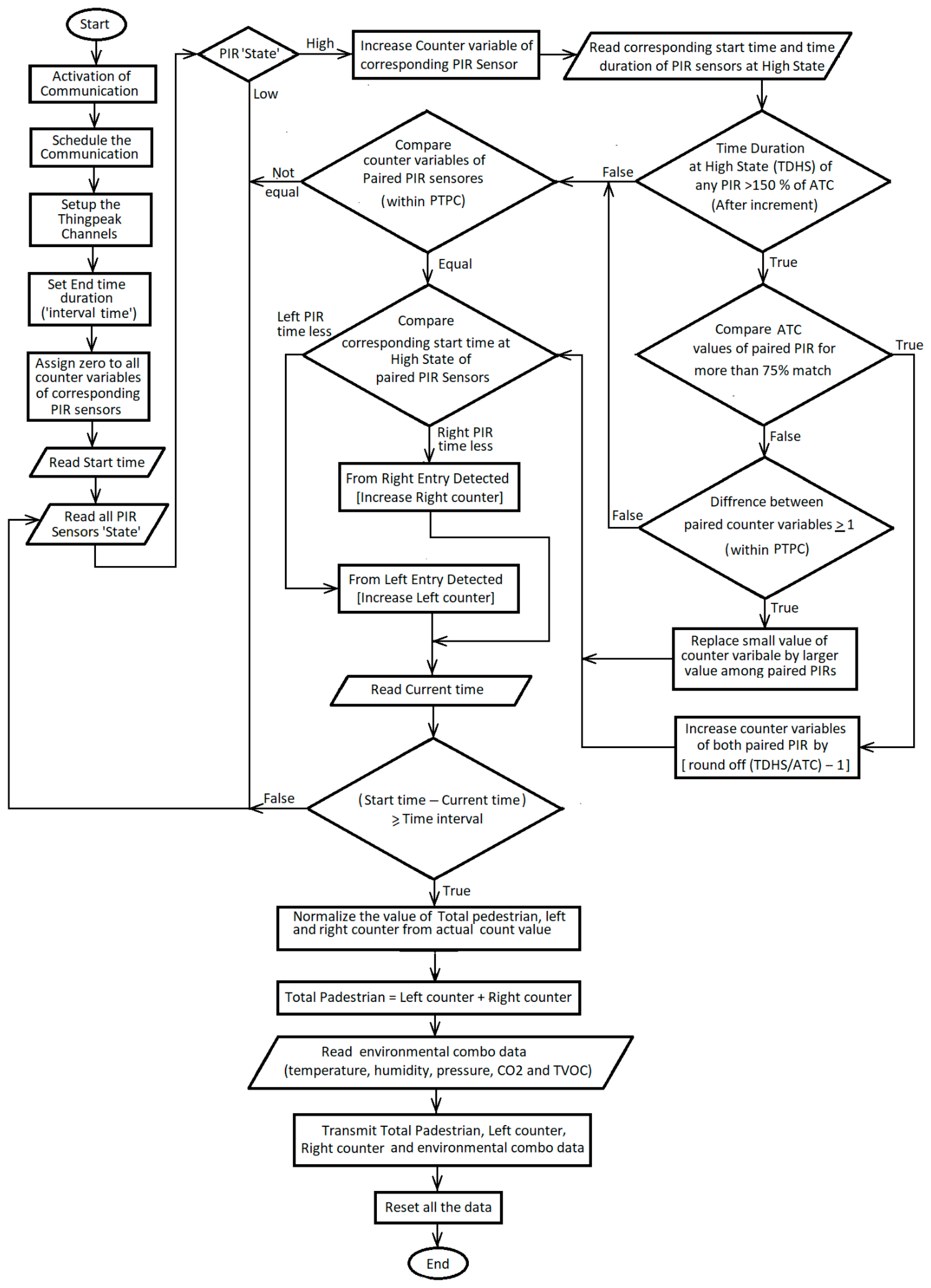
2.4. Algorithm of the Pedestrian Count
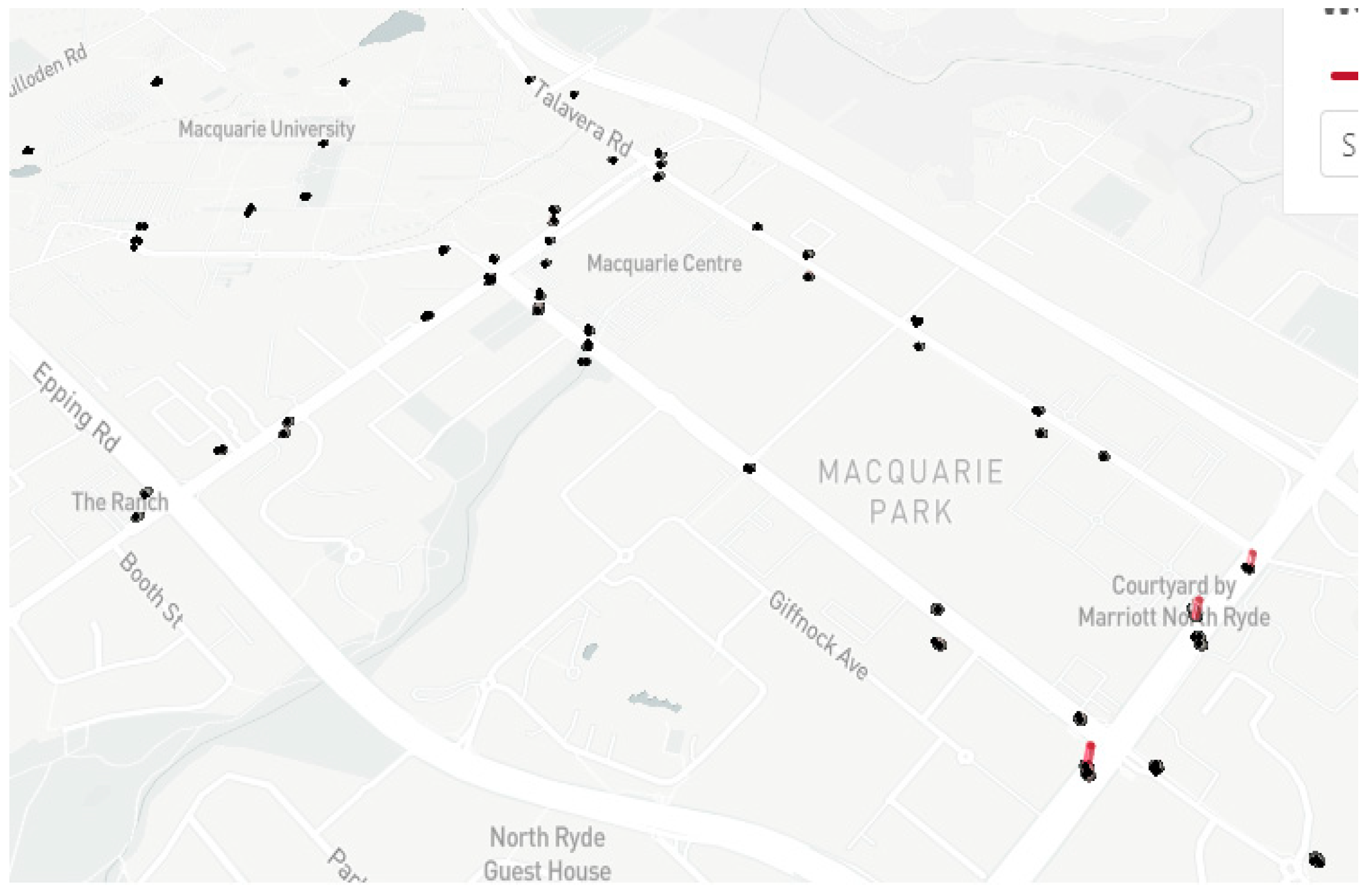
2.5. Study Location
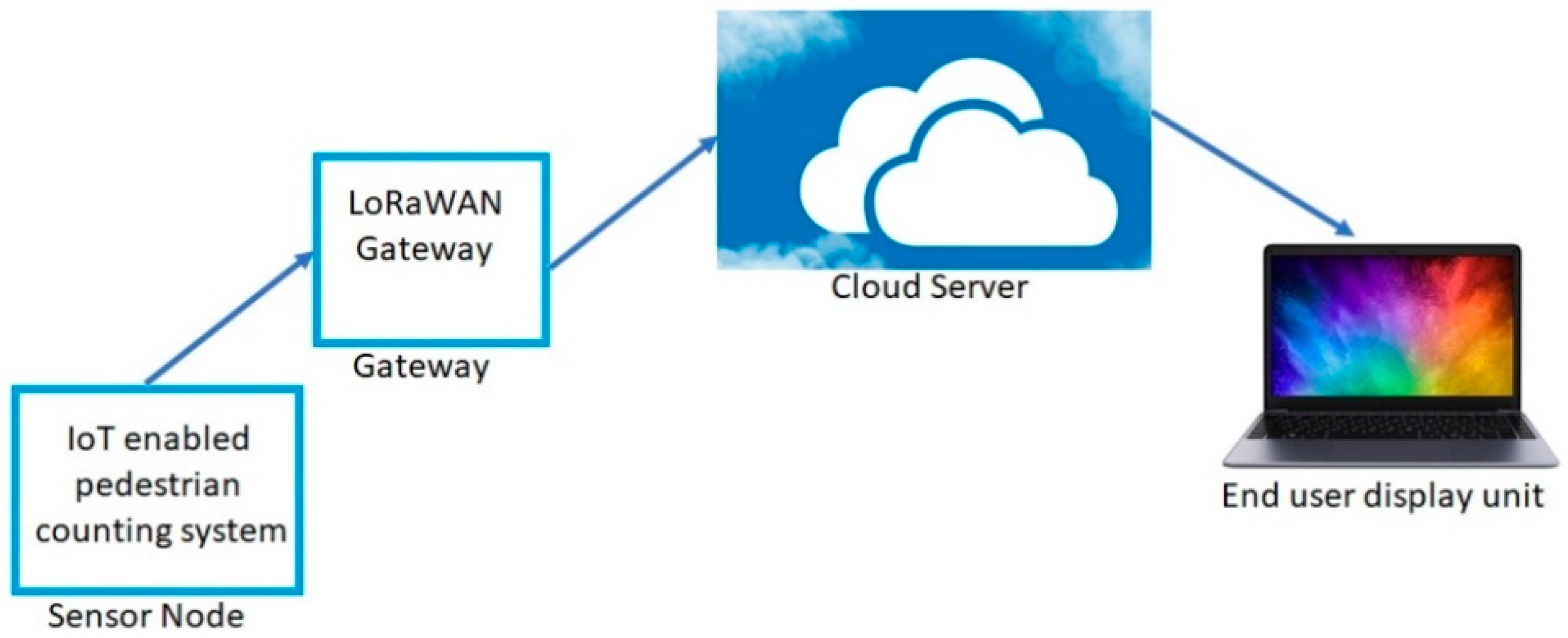
2.6. Data Transmission and Collection
3. Results and Discussions
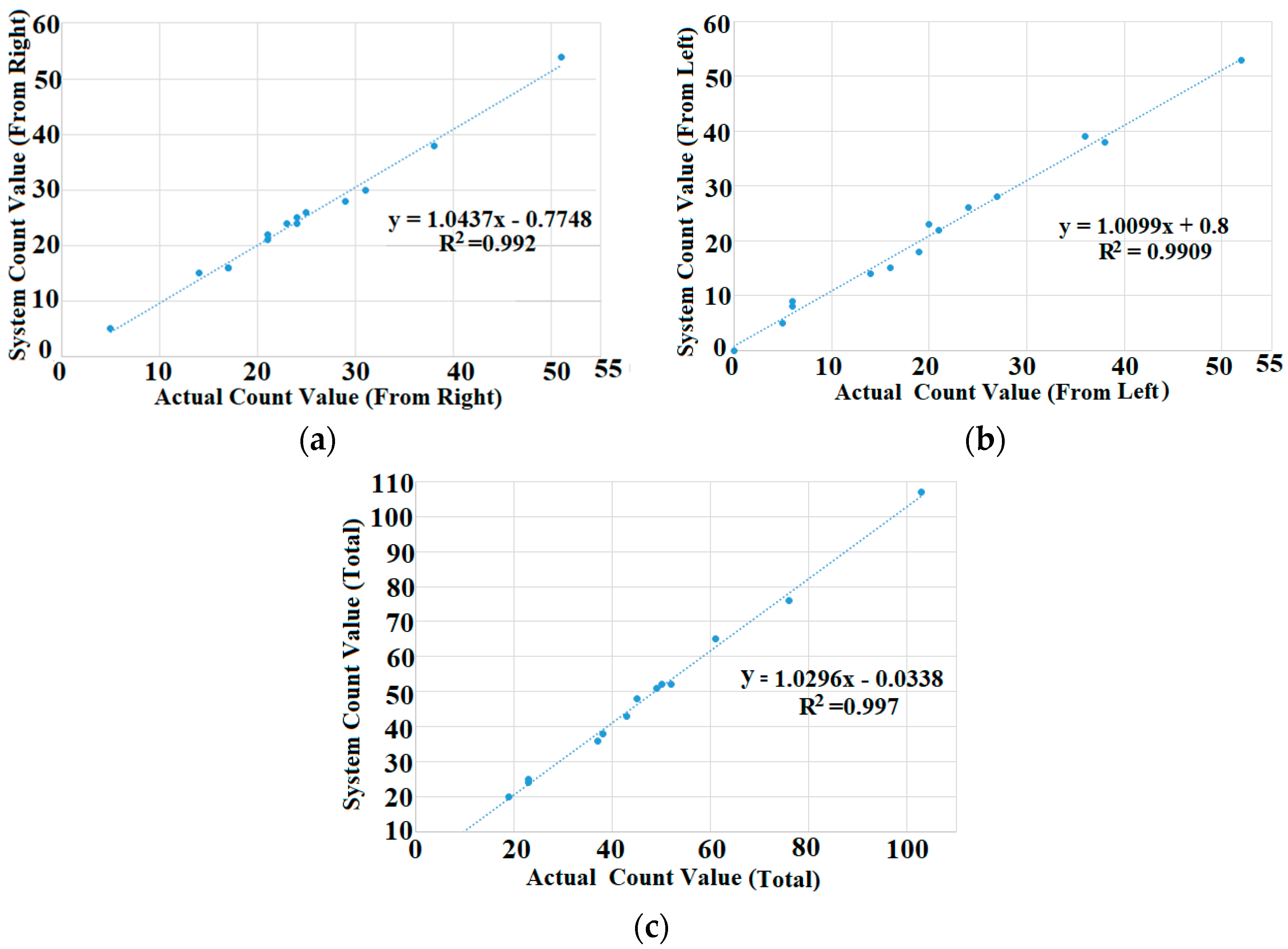
3.1. Data Collection and Validation
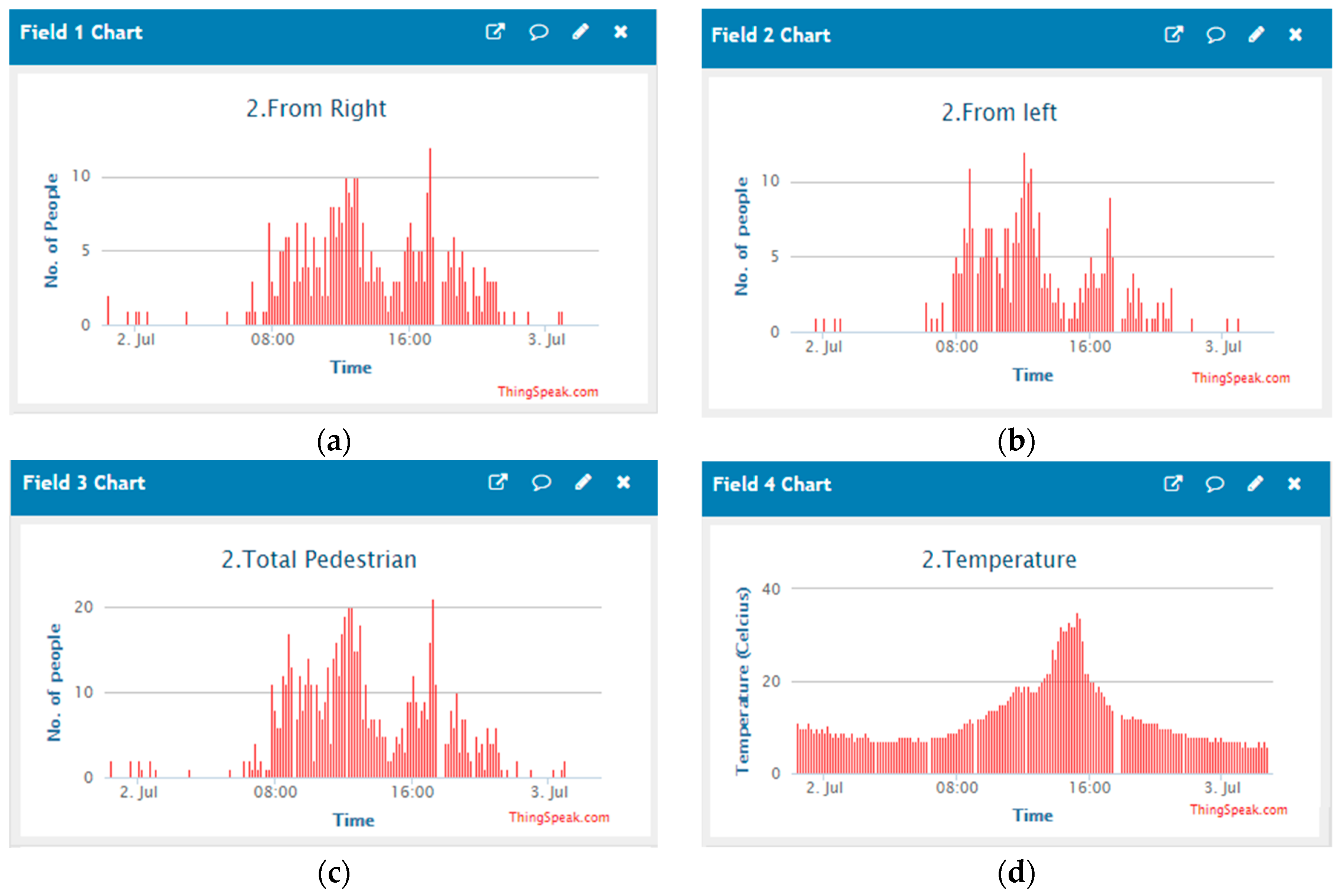
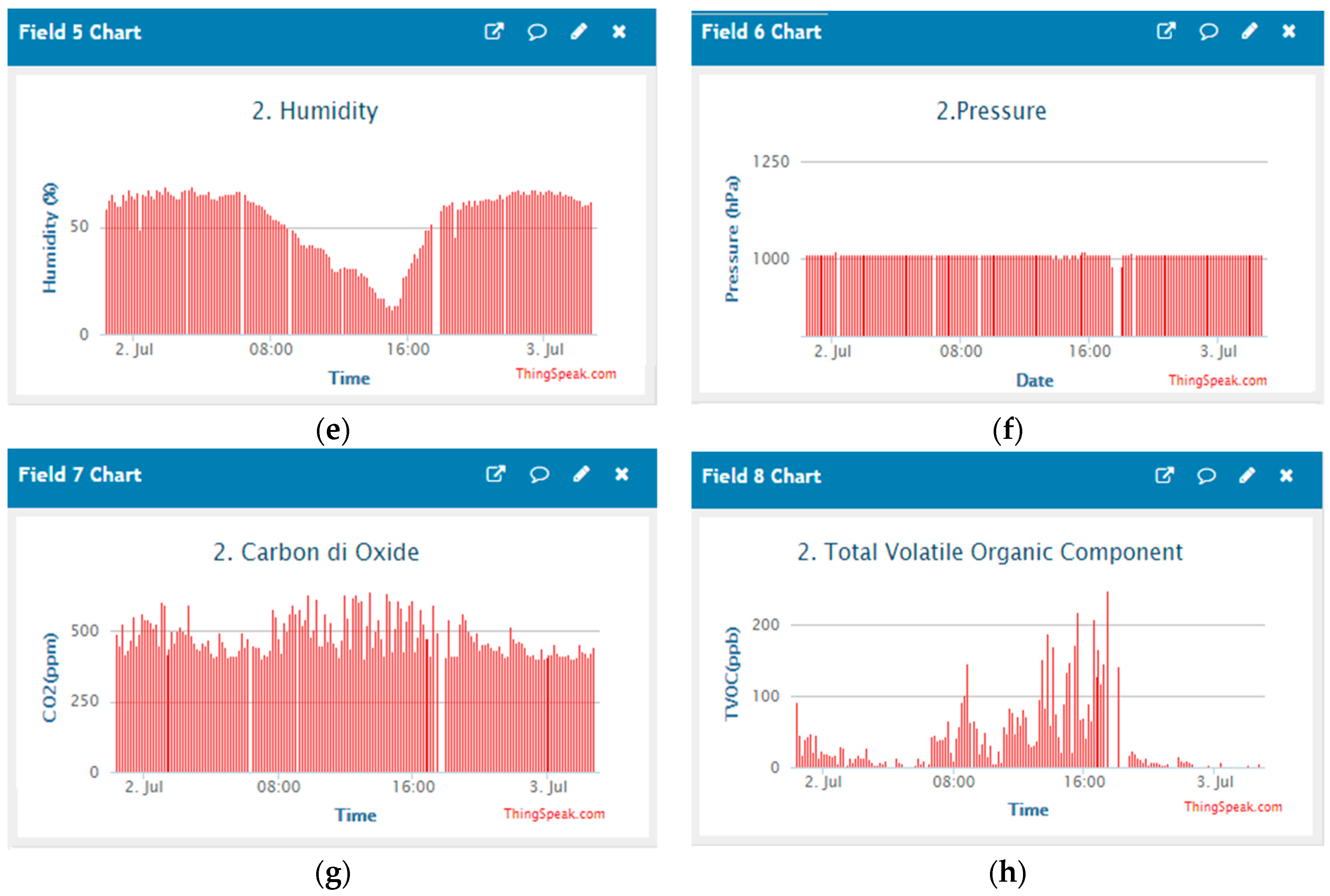
3.2. Data Transfer to IoT Cloud Server
3.3. Power Consumption
- Vs = nominal voltage of the sensor node = 3.3 V
- In = current drawn by the sensor node in 1 h = 40.01 mA
- Itd = current drawn during transmission = 120 mA
- ttd = time duration of data transmission = 60 mc
- ftd = frequency of data transmission =
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kim, T.; Ramos, C.; Mohammed, S. Smart city and IoT. Future Gener. Comput. Syst. 2017, 76, 159–162. [Google Scholar] [CrossRef]
- Schaffers, H.; Komninos, N.; Pallot, M.; Trousse, B.; Nilsson, M.; Oliveira, A. Smart cities and the future internet: Towards cooperation frameworks for open innovation. Future Int. Assem. 2011, 16, 431–446. [Google Scholar]
- Bibri, S.E.; Krogstie, J. Smart sustainable cities of the future: An extensive interdisciplinary literature review. Sustain. Cities Soc. 2017, 31, 183–212. [Google Scholar] [CrossRef]
- Jo, O.; Kim, Y.K.; Kim, J. Internet of Things for Smart Railway: Feasibility and Applications. IEEE IoT J. 2018, 5, 482–490. [Google Scholar] [CrossRef]
- Xiong, J.; Li, F.; Zhao, N.; Jiang, N. Tracking and Recognition of Multiple Human Targets Moving in a Wireless Pyroelectric Infrared Sensor Network. Sensors 2014, 14, 7209–7228. [Google Scholar] [CrossRef] [PubMed]
- Shankar, M.; Burchett, J.B.; Hao, Q.; Guenther, B.D.; Brady, D.J. Human-tracking systems using pyroelectric infrared detectors. Opt. Eng. 2006, 45, 106401. [Google Scholar] [CrossRef]
- Wi-Fi Alliance. Available online: https://www.wi-fi.org/ (accessed on 2 July 2019).
- Balaji, B.; Xu, J.; Nwokafor, A.; Gupta, R.; Agarwal, Y. Sentinel: Occupancy based HVAC actuation using existing WiFi infrastructure within commercial buildings. In Proceedings of the 11th ACM Conference on Embedded Networked Sensor Systems, Roma, Italy, 11–15 November 2013. [Google Scholar]
- Akkaya, K.; Guvenc, I.; Aygun, R.; Pala, N.; Kadri, A. IoT-based occupancy monitoring techniques for energy-efficient smart buildings. In Proceedings of the IEEE Wireless Communication Network Conference. Workshops (WCNCW), New Orleans, LA, USA, 9–12 March 2015; pp. 58–63. [Google Scholar]
- Laoudias, C.; Moreira, A.; Kim, S.; Lee, S.; Wirola, L.; Fischione, C. A survey of enabling technologies for network localization, tracking, and navigation. IEEE Commun. Surv. Tutor. 2018, 6, 3607–3644. [Google Scholar] [CrossRef]
- Serrano-Cuerda, J.; Castillo, J.C.; Sokolova, M.V.; Fernández-Caballero, A. Efficient People Counting from Indoor Overhead Video Camera. In Trends in Practical Applications of Agents and Multiagent Systems; Springer: Cham, Switzerland, 2013; Volume 221, pp. 129–137. [Google Scholar]
- Roqueiro, D.; Petrushin, V.A. Counting people using video cameras. Int. J. Parallel Emergent Distrib. Syst. 2007, 22, 193–209. [Google Scholar] [CrossRef]
- Lawson, T.; Rogerson, R.; Barnacle, M. A comparison between the cost effectiveness of CCTV and improved street lighting as a means of crime reduction. Comput. Environ. Urban Syst. 2018, 68, 17–25. [Google Scholar] [CrossRef]
- Barthélemy, J.; Verstaevel, N.; Forehead, H.; Perez, P. Edge-Computing Video Analytics for Real-Time Traffic Monitoring in a Smart City. Sensors 2019, 19, 2048. [Google Scholar] [CrossRef]
- Sidla, O.; Lypetskyy, Y. Pedestrian detection and tracking for counting applications in crowded situations. In Proceedings of the IEEE International Conference on Video and Signal Based Surveillance, Sydney, Australia, 22–24 November 2006. [Google Scholar]
- Kristoffersen, M.S.; Jacob, V.; Dueholm, J.V.; Gade, R.; Moeslund, T.B. Pedestrian counting with occlusion handling using stereo thermal cameras. Sensors 2016, 16, 62. [Google Scholar] [CrossRef] [PubMed]
- Retail Sensing: People Counting Systems. Available online: https://www.retailsensing.com/smart-city-iot.html (accessed on 7 April 2019).
- Mukhopadhyaya, B.; Srirangarajana, S.; Kara, S. Modeling the Analog Response of Passive Infrared Sensor. Sens. Actuators A Phys. 2018, 279, 65–74. [Google Scholar] [CrossRef]
- Zappi, P.; Farella, E.; Benini, L. Tracking motion direction and distance with Pyroelectric IR Sensors. IEEE Sens. J. 2010, 10, 1486–1494. [Google Scholar] [CrossRef]
- Wang, H.T.; Jia, Q.S.; Song, C.; Yuan, R.; Guan, X. Building occupant level estimation based on heterogeneous information fusion. Inf. Sci. 2014, 272, 145–157. [Google Scholar] [CrossRef]
- PIR Sensor with LED Signal. Available online: https://www.parallax.com/downloads/pir-sensor-rev-b-product-guide (accessed on 15 April 2019).
- Hao, Q.; Hu, F.; Xiao, Y. Multiple human tracking and identification with wireless distributed pyroelectric sensor systems. IEEE Sens. J. 2009, 3, 428–439. [Google Scholar]
- Jin, X.; Sarkar, S.; Ray, A.; Gupta, S.; Damarla, T. Target detection and classification using Seismic and PIR sensors. IEEE Sens. J. 2012, 12, 1709–1718. [Google Scholar] [CrossRef]
- Tsiropoulou, E.E.; Baras, J.S.; Papavassiliou, S.; Sinha, S. RFID-based smart parking management system. Cyber Phys. Syst. 2017, 3, 22–41. [Google Scholar] [CrossRef]
- Revathi, G.; Dhulipala, V.R.S. Smart Parking Systems and Sensors: A Survey. In Proceedings of the International Conference on Computing, Communication and Applications, Tamilnadu, India, 22–24 February 2012. [Google Scholar]
- Fragkos, G.; Apostolopoulos, P.A.; Tsiropoulou, E.E. ESCAPE: Evacuation Strategy through Clustering and Autonomous Operation in Public Safety Systems. Future Internet 2019, 11, 20. [Google Scholar] [CrossRef]
- Gorbil, G.; Filippoupolitis, A.; Gelenbe, E. Intelligent Navigation Systems for Building Evacuation. In Computer and Information Sciences II; Springer: London, UK, 2011. [Google Scholar]
- Çiftler, B.S.; Dikmese, S.; Güvenç, I.; Akkaya, K.; Kadri, A. Occupancy counting with burst and intermittent signals in smart buildings. IEEE IoT J. 2018, 5, 724–735. [Google Scholar] [CrossRef]
- Zigbee Alliance. Available online: https://www.zigbee.org/ (accessed on 3 July 2019).
- Noreen, U.; Bounceur, A.; Clavier, L. A Study of LoRa Low Power and Wide Area Network Technology. In Proceedings of the International Conference on Advanced Technologies for Signal and Image Processing, Fez, Morocco, 22–24 May 2017. [Google Scholar]
- Melbourne—Pedestrian Counting System. Available online: https://cityos.io/view.competitor/28645/Melbourne-Pedestrian-Counting-System (accessed on 1 May 2019).
- Smart Pedestrian: Smart Cities, Smart Liverpool, Smart Pedestrian Project. Available online: https://www.liverpool.nsw.gov.au/business/smart-pedestrian (accessed on 5 May 2019).
- Aucklan—Pedestrians in the City. Available online: https://cityos.io/view.competitor/28647/Auckland-Pedestrians-in-the-City (accessed on 8 May 2019).
- New York—Deployment of Placemeter. Available online: https://cityos.io/view.competitor/28669/New-York-Deployment-of-Placemeter (accessed on 15 May 2019).
- Dublin—Pedestrian Footfall Index in City Centre. Available online: https://cityos.io/view.competitor/28670/Dublin-Pedestrian-footfall-index-in-City-Centre (accessed on 15 May 2019).
- Barcelona—Thermal Camera Based Counting. Available online: https://cityos.io/view.competitor/28671/Barcelona-Thermal-camera-based-counting (accessed on 15 May 2019).
- Dog: Animal. Available online: https://www.petcare.com.au/dog-breeds/ (accessed on 28 May 2019).
- Street Lighting Poles. Available online: https://www.gsindustries.com.au/products/products/streetlighting-poles.aspx (accessed on 15 April 2019).
- SparkFun Environmental Combo Breakout—CCS811/BME280 (Qwiic). Available online: https://www.sparkfun.com/products/14348 (accessed on 30 May 2019).
- SparkFun Qwiic Shield for Arduino. Available online: https://www.sparkfun.com/products/14352 (accessed on 30 May 2019).
- Arduino Uno. Available online: https://www.arduino.cc/ (accessed on 29 May 2019).
- Seeed Studio Solar Charger Shield V2.2. Available online: https://www.iot-store.com.au/products/seeed-studio-solar-charger-shield-v2-2 (accessed on 1 June 2019).
- Lora Shield for Arduino—Long Range Transceiver. Available online: https://www.iot-store.com.au/products/lora-shield-for-arduino-long-range-transceiver?variant=37156778311¤cy=AUD&utm_campaign=gs-2018-09-30&utm_source=google&utm_medium=smart_campaign&gclid=EAIaIQobChMIitblvLXM4gIVCg4rCh3gYwYbEAQYASABEgKT6PD_BwE (accessed on 2 June 2019).
- Huge 6V 6W Solar Panel—6.0 Watt. Available online: https://www.adafruit.com/product/1525?gclid=CI6v9P60gdQCFdCXfgodMbwI2g (accessed on 1 June 2019).
- Spare Li-ion Battery to Suit DC-1074/DC-1093. Available online: https://www.jaycar.com.au/spare-li-ion-battery-to-suit-dc-1074-dc-1093/p/DC1075 (accessed on 2 June 2019).
- Qwiic Cable—100, mm. Available online:. Available online: https://www.sparkfun.com/products/14427 (accessed on 3 June 2019).
- ANT-916-CW-HWR-SMA-ND. Available online: https://www.digikey.com.au/product-detail/en/linx-technologies-inc/ANT-916-CW-HWR-SMA/ANT-916-CW-HWR-SMA-ND/1139580 (accessed on 2 June 2019).
- Dreamer 3D Printer. Available online: http://www.flashforge.com/dreamer-3d-printer/ (accessed on 5 July 2019).
- Thingspeak. Available online: https://thingspeak.com/ (accessed on 1 July 2019).
- The Things Network. Available online: https://www.thethingsnetwork.org/docs/gateways/ (accessed on 5 July 2019).
- Mekkia, K.; Bajica, E.; Chaxela, F.; Meyerb, F.A. Comparative study of LPWAN technologies for large-scale IoT Deployment. ICT Express 2019, 5, 1–7. [Google Scholar] [CrossRef]
- Raza, U.; Kulkarni, P.; Sooriyabandara, M. Low power wide area networks: An overview. IEEE J. Commun. Surv. Tutor. 2017, 19, 855–873. [Google Scholar] [CrossRef]
- Choi, W.; Chang, Y.S.; Jung, Y.; Song, J. Low-Power LoRa signal-based outdoor positioning using fingerprint Algorithm. ISPRS Int. J. Geo-Inf. 2018, 7, 440. [Google Scholar] [CrossRef]
- Latest Weather Observations for the Sydney Area. Available online: http://www.bom.gov.au/nsw/observations/sydney.shtml (accessed on 3 June 2019).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| City | Sensing Tech. | Features | Installation | Comm. Tech. | Power Consumption | Cost | Ref |
|---|---|---|---|---|---|---|---|
| Melbourne, Australia | A thermal and laser-based sensor | Pedestrian count | Separate installation | 3G | High | High | [31] |
| Liverpool, Sydney, Australia | Video camera | Pedestrian and vehicle count | On electric pole | LoRa | Low | High | [32] |
| Auckland, New Zealand | Thermal camera | Pedestrian count and direction of travel | Under the canopy or on electric pole | 3G | High | High | [33] |
| New York, NY, USA | Video camera | Pedestrian count | electric pole | 4G | High | High | [34] |
| Dublin, Ireland | Video camera | Pedestrian count and direction of travel | Separate installation | 3G | High | High | [35] |
| Barcelona, Spain | Thermal camera | Pedestrian count | Separate installation | 3G | High | High | [36] |
| Macquarie University, Australia. (This system) | PIR sensor | Pedestrian count, direction of travel, temperature, humidity, pressure, CO2 and TVOC | on electric pole | Lora | Low | Low | [This Work] |
| Name of the Section of Fresnel Lens | Maximum Coverage Length at Full Sensitivity (m) | Minimum Coverage Length at Reduced Sensitivity (m) |
|---|---|---|
| C | 4 | 1.8 |
| F | 5 | 2.25 |
| E | 6.6 | 3 |
| D | 7.2 | 3.25 |
| B | 7.6 | 3.5 |
| A | 10 | 4.5 |
| Name of the Item | Description |
|---|---|
| Arduino Uno Rev 3 | Development board |
| Parallax Inc. 555-28027 PIR sensor module | Motion detection sensor |
| CCS811/BME280 (Qwiic) Environmental Combo | CCS811 provides equivalent CO2 (or eCO2) in the parts per million (PPM) and total volatile organic compounds in the parts per billion (PPB). BME280 provides humidity (%), temperature (°C), and barometric pressure (Pa). |
| Qwiic Shield | Incorporate Environmental Combo with Arduino |
| Seed Studies Solar charger shield v2.2 | Power management block |
| 6V 6W solar panel | Solar panel from Voltaic |
| LoRa Shield for Arduino 915 MHz | Long-range transceiver |
| Polymer Lithium Ion Battery 3.7 V 6000 mAh | Rechargeable battery |
| ANT-916-CW-HWR-SMA [47] | External antenna |
| Time | Actual Count | System Count | ||||||
|---|---|---|---|---|---|---|---|---|
| Animal | Pedestrian | Pedestrian | ||||||
| Bellow 1 m | Above 1 m | Total | Right | Left | Total | Right | Left | |
| 08:00–09:00 | 0 | 0 | 61 | 25 | 36 | 65 | 26 | 39 |
| 09:00–10:00 | 0 | 0 | 50 | 23 | 27 | 52 | 24 | 28 |
| 10:00–11:00 | 0 | 0 | 45 | 21 | 24 | 48 | 22 | 26 |
| 11:00–12:00 | 1 | 0 | 76 | 38 | 38 | 76 | 38 | 38 |
| 12:00–13:00 | 0 | 0 | 103 | 51 | 52 | 107 | 54 | 53 |
| 13:00–14:00 | 0 | 0 | 43 | 24 | 19 | 43 | 25 | 18 |
| 14:00–15:00 | 0 | 0 | 23 | 17 | 6 | 24 | 16 | 8 |
| 15:00–16:00 | 5 | 0 | 37 | 21 | 16 | 36 | 21 | 15 |
| 16:00–17:00 | 3 | 0 | 49 | 29 | 20 | 51 | 28 | 23 |
| 17:00–18:00 | 0 | 0 | 52 | 31 | 21 | 52 | 30 | 22 |
| 18:00–19:00 | 2 | 0 | 38 | 24 | 14 | 38 | 24 | 14 |
| 19:00–20:00 | 0 | 0 | 19 | 14 | 5 | 20 | 15 | 5 |
| 20:00–21:00 | 0 | 0 | 23 | 17 | 6 | 25 | 16 | 9 |
| 21:00–22:00 | 0 | 0 | 5 | 5 | 0 | 5 | 5 | 0 |
| Time | Developed System | Manual Counting | Error (%) |
|---|---|---|---|
| 10:00–11:00 | 97 | 102 | 5 |
| 11:00–12:00 | 73 | 76 | 4 |
| 12:00–13:00 | 103 | 107 | 4 |
| 13:00–14:00 | 44 | 46 | 4 |
| 14:00–15:00 | 54 | 56 | 4 |
| 15:00–16:00 | 42 | 44 | 5 |
| 16:00–17:00 | 79 | 81 | 2 |
| 17:00–18:00 | 49 | 51 | 4 |
| 18:00–19:00 | 29 | 30 | 3 |
| 19:00–20:00 | 35 | 36 | 3 |
| Name of the Component | Time | Current Consumption (mA) | Current Drawn in One Cycle (mAsec) |
|---|---|---|---|
| Arduino Uno MCU | 10 min | 20 | |
| six PIR sensors | 10 min | 18 | |
| Env. combo (idle) | 9 min 59 s | 1 | |
| Env. combo (active) | 1 s | 13 | |
| LoRa shield(idle) | 9 min 59 s 940 ms | 1 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Akhter, F.; Khadivizand, S.; Siddiquei, H.R.; Alahi, M.E.E.; Mukhopadhyay, S. IoT Enabled Intelligent Sensor Node for Smart City: Pedestrian Counting and Ambient Monitoring. Sensors 2019, 19, 3374. https://doi.org/10.3390/s19153374
Akhter F, Khadivizand S, Siddiquei HR, Alahi MEE, Mukhopadhyay S. IoT Enabled Intelligent Sensor Node for Smart City: Pedestrian Counting and Ambient Monitoring. Sensors. 2019; 19(15):3374. https://doi.org/10.3390/s19153374
Chicago/Turabian StyleAkhter, Fowzia, Sam Khadivizand, Hasin Reza Siddiquei, Md Eshrat E. Alahi, and Subhas Mukhopadhyay. 2019. "IoT Enabled Intelligent Sensor Node for Smart City: Pedestrian Counting and Ambient Monitoring" Sensors 19, no. 15: 3374. https://doi.org/10.3390/s19153374
APA StyleAkhter, F., Khadivizand, S., Siddiquei, H. R., Alahi, M. E. E., & Mukhopadhyay, S. (2019). IoT Enabled Intelligent Sensor Node for Smart City: Pedestrian Counting and Ambient Monitoring. Sensors, 19(15), 3374. https://doi.org/10.3390/s19153374