Mobile Phone Usage Detection by ANN Trained with a Metaheuristic Algorithm †





Abstract
:1. Introduction
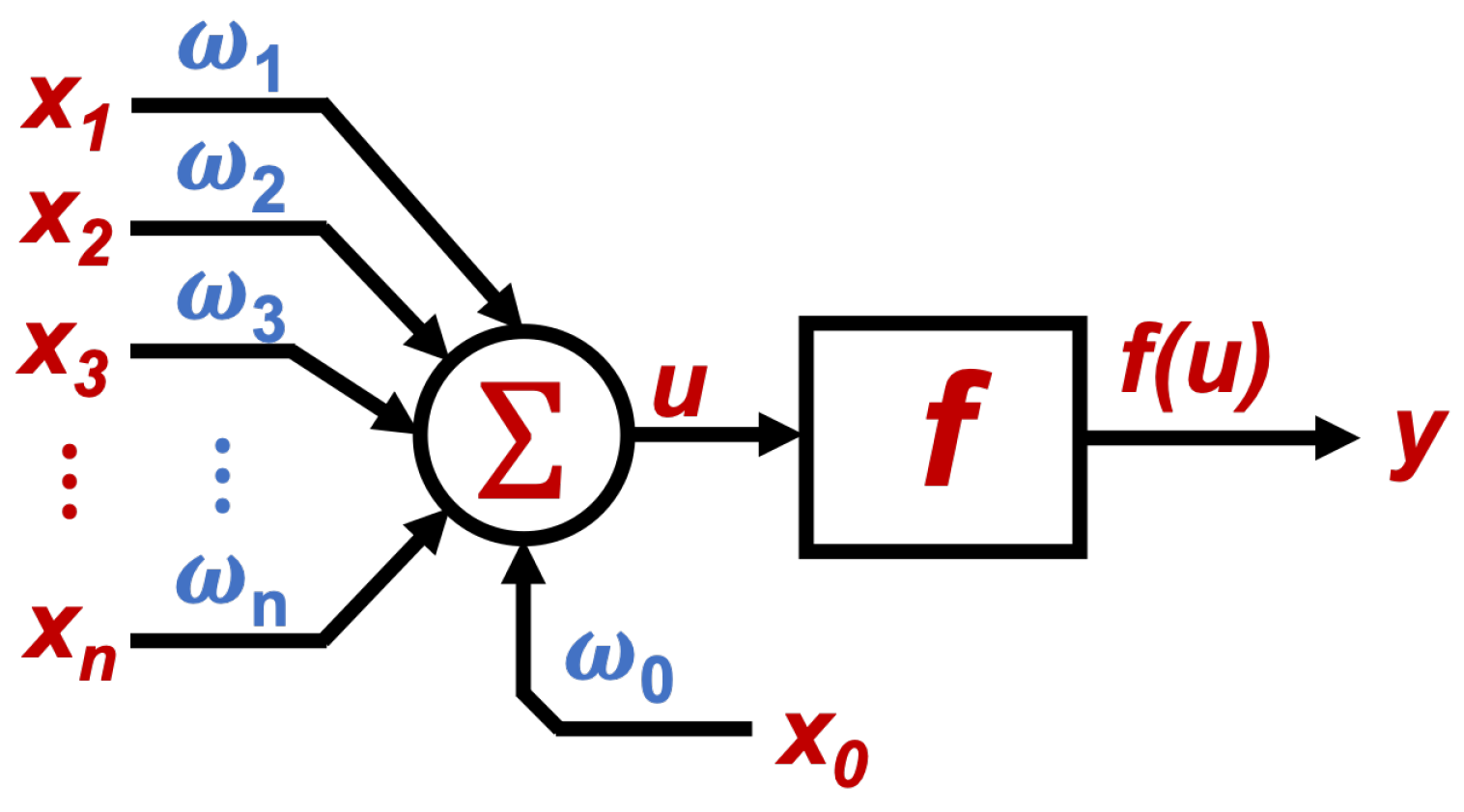
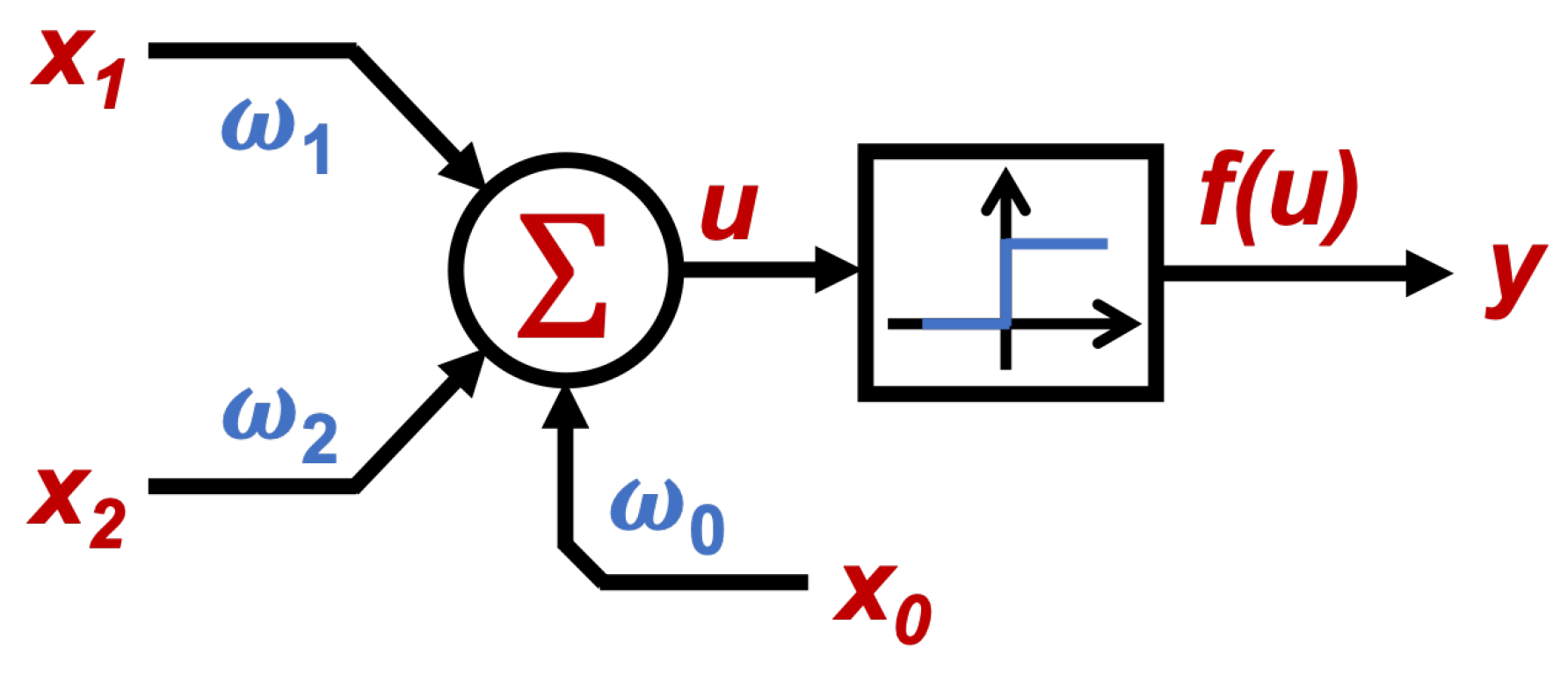
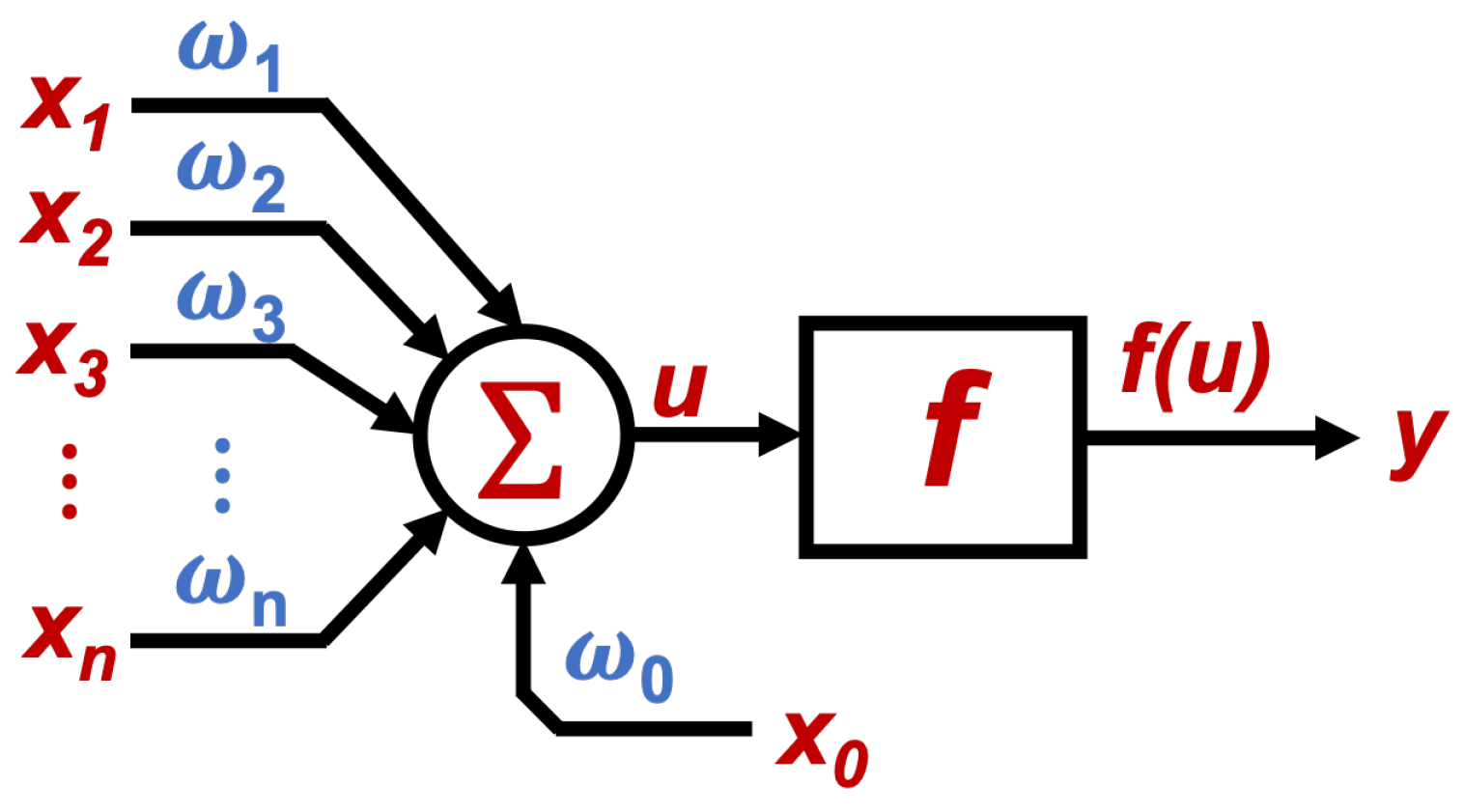
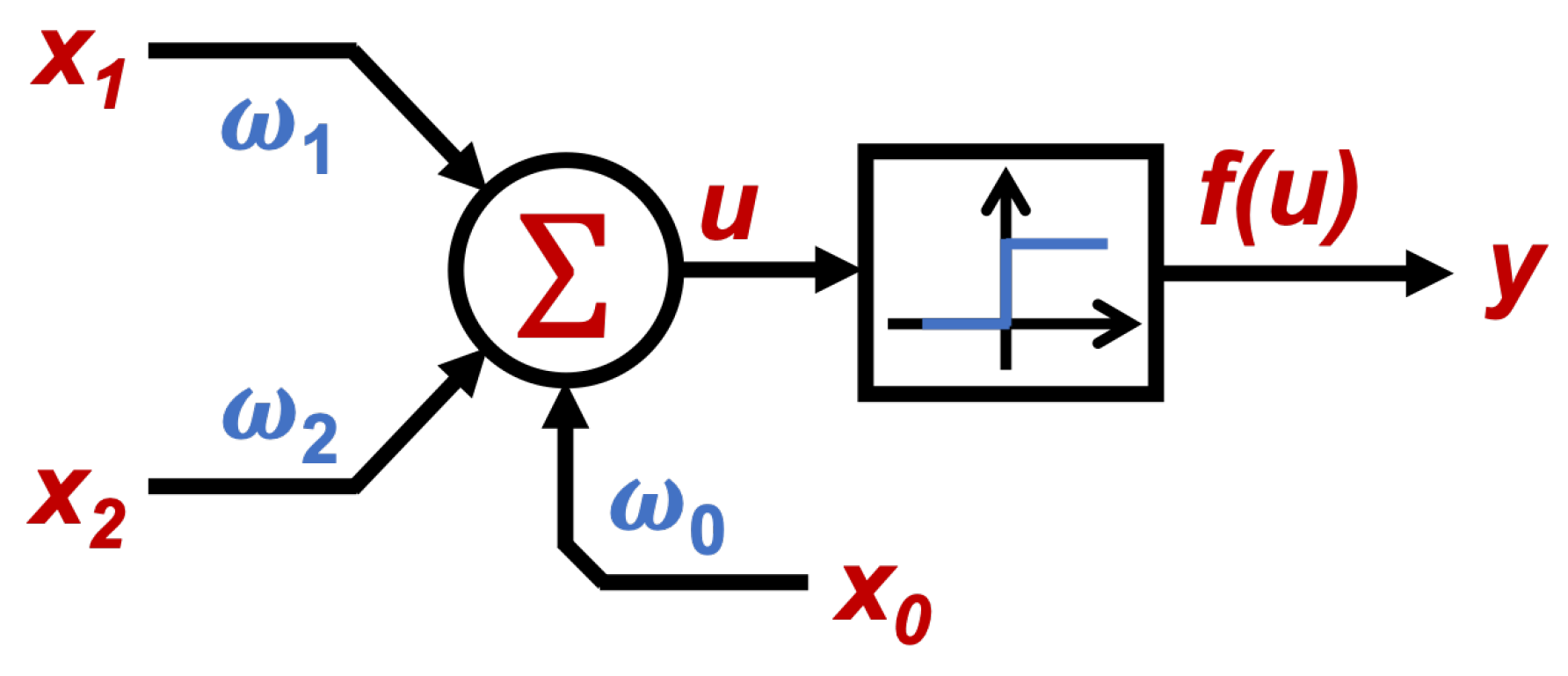
2. Artificial Neural Network
- Set of neurons.
- Connections between neurons.
- Activation functions for each neuron.
- Step function: usually used when a binary output is needed.
- Lineal and mixed function: often chosen when the output can be taken as a linear relation from the weighted sum, in a defined range.
- Hyperbolic tangent function: used when smooth positive or negative variations are expected from the output.
- Gauss function: mainly used to reduce (when possible) hidden mapping, to one layer of neurons.
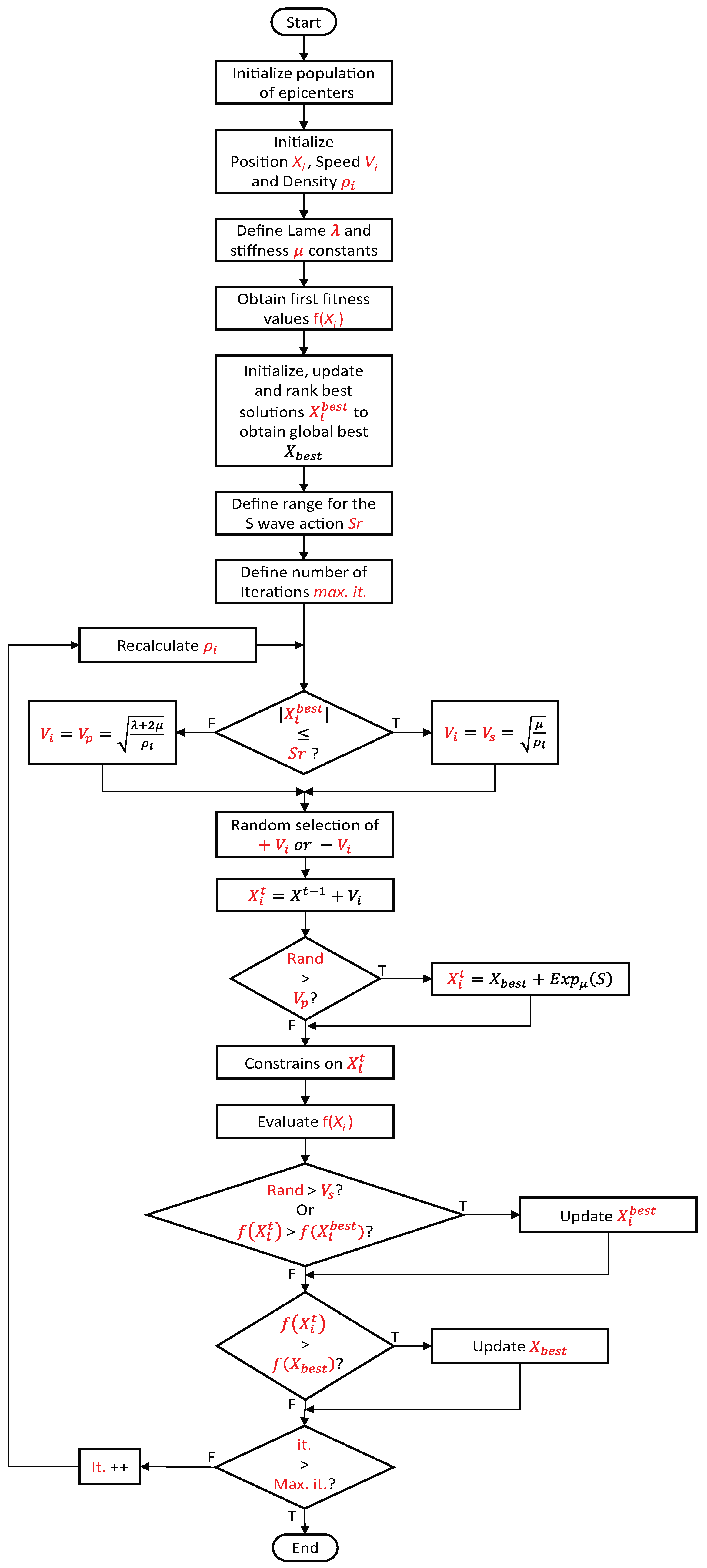
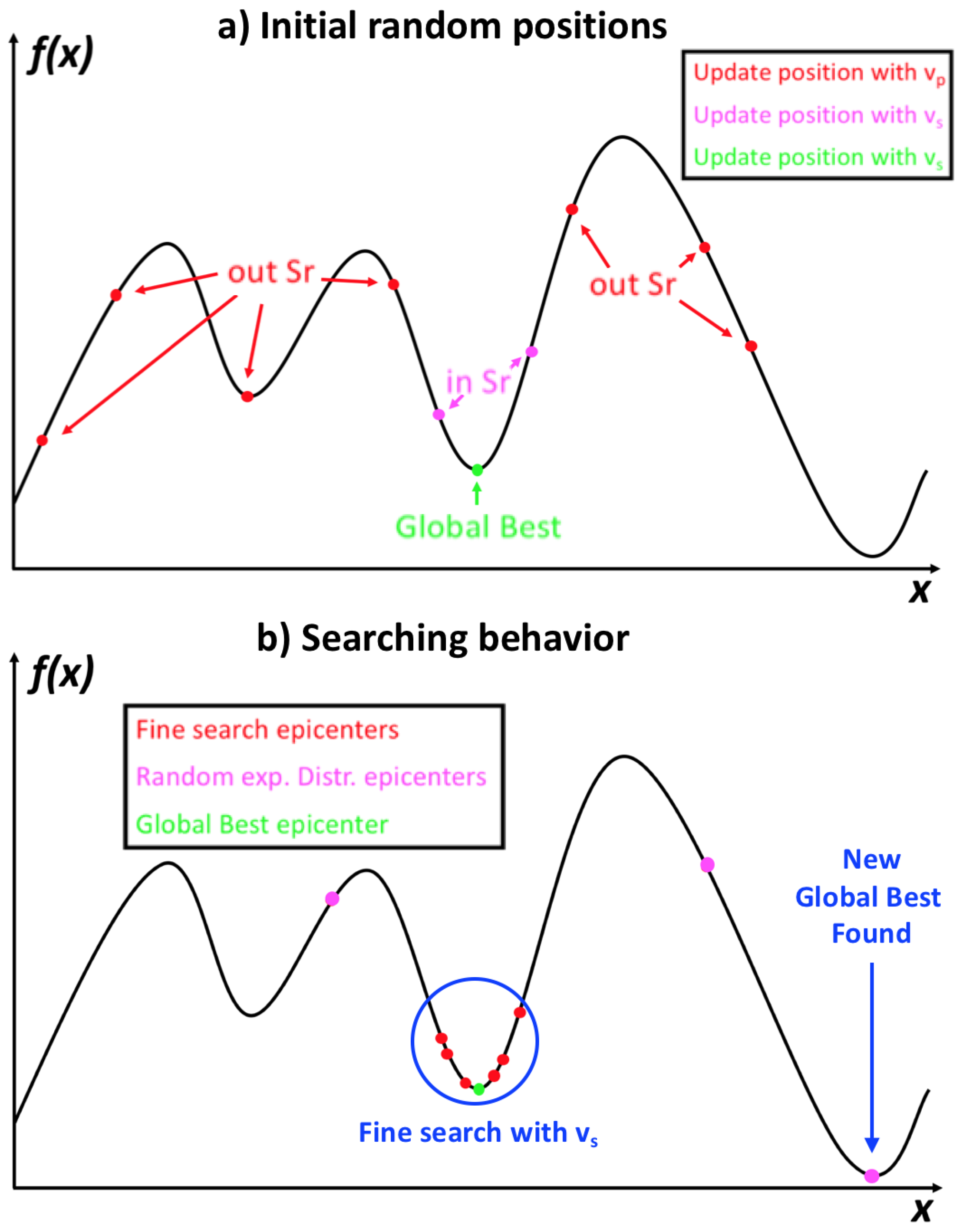
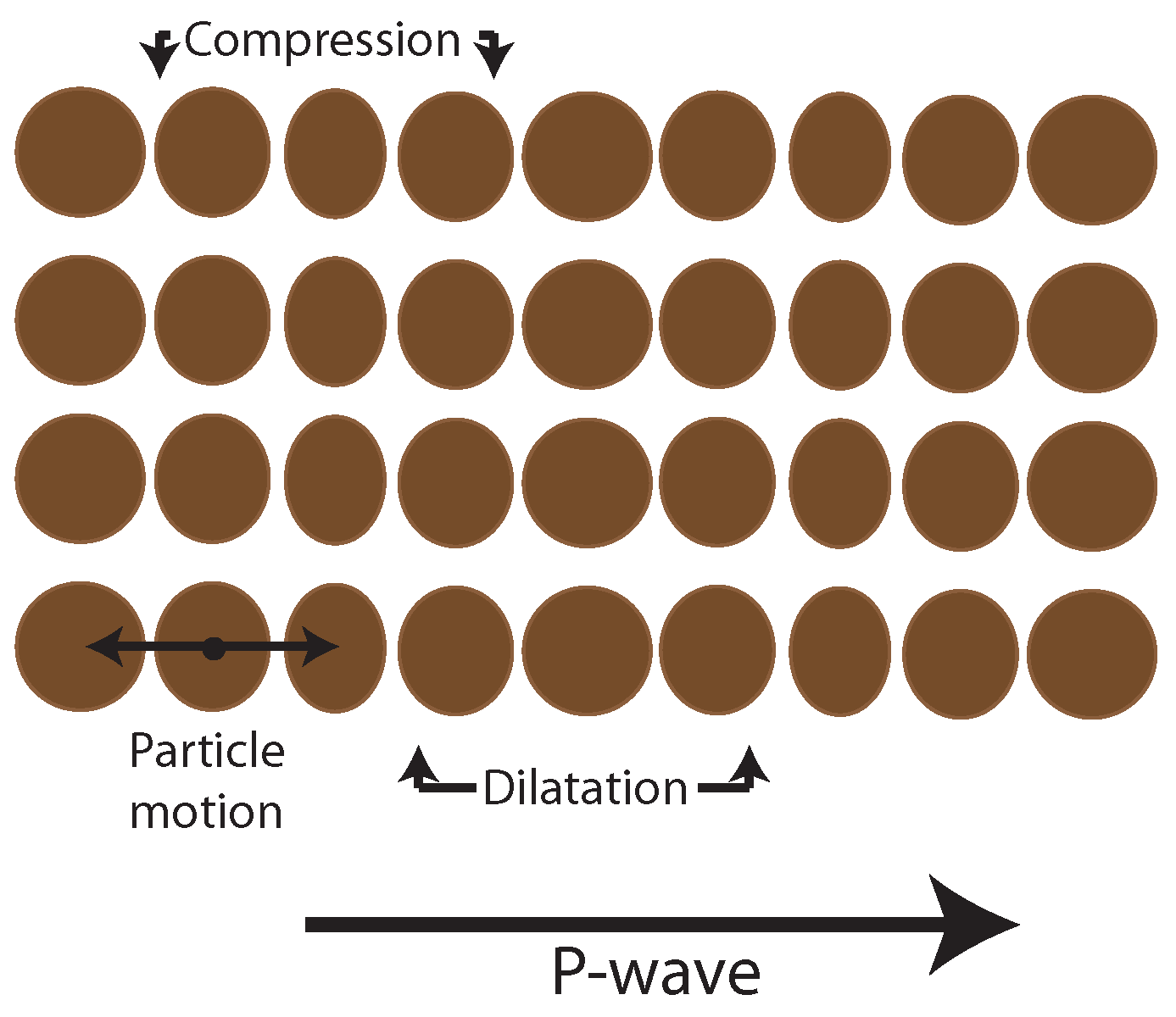
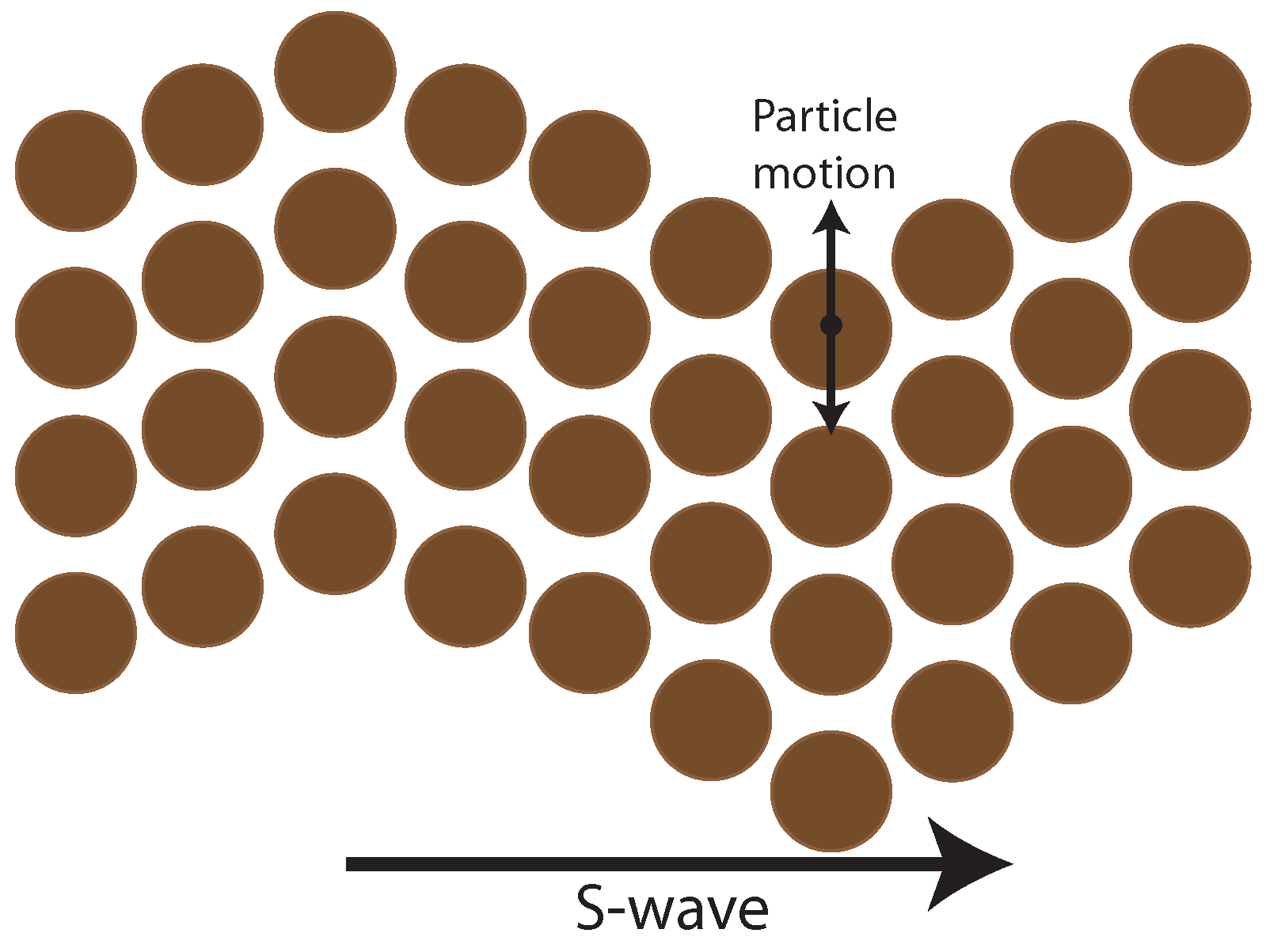
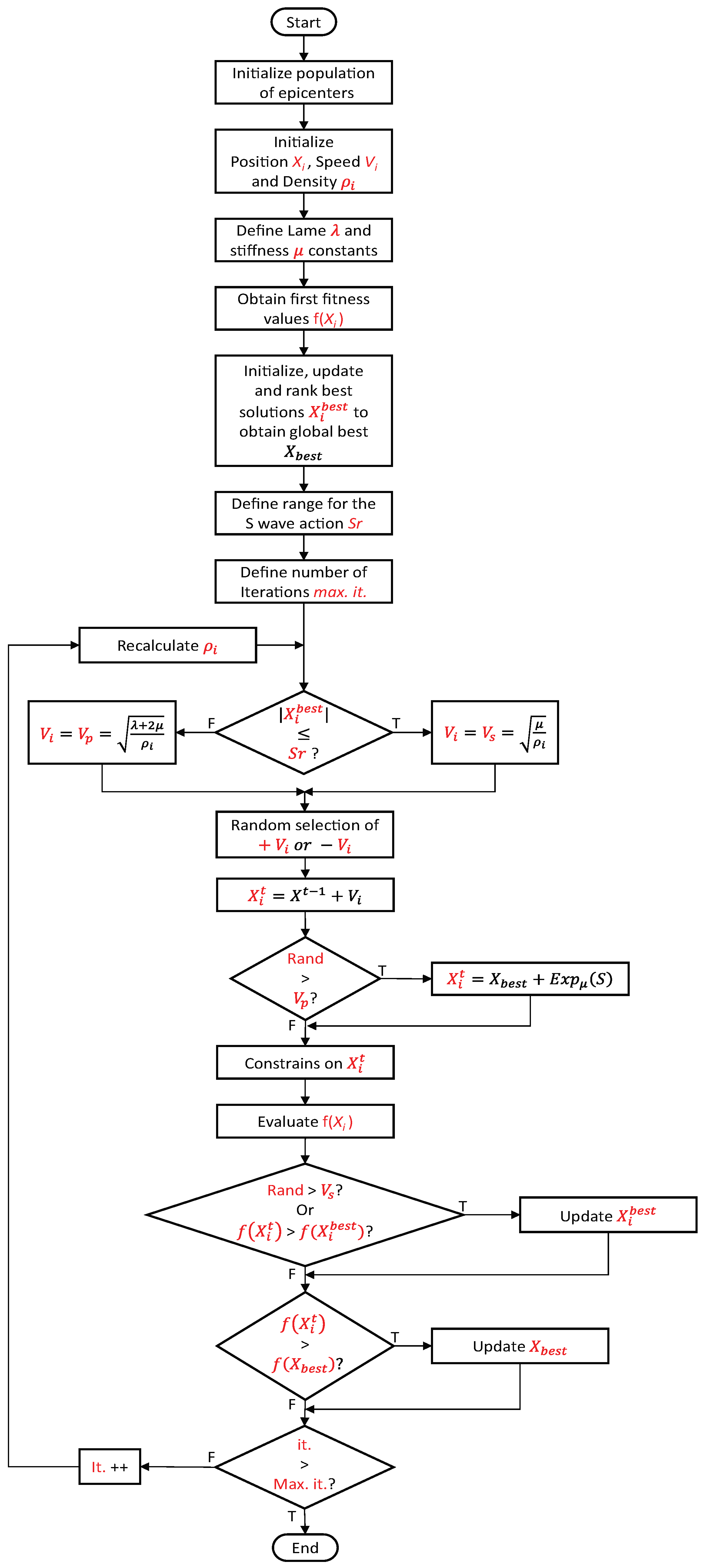
3. Earthquake Algorithm
| Algorithm 1 Pseudocode of the EA. |
| 1: Define objective function. 2: Initialize population of epicenters. 3: Randomly initialize x. 4: Initialize v and . 5: Define and . 6: Obtain and rank the first fitness values. 7: Initialize x and x with the fitness values. 8: Define Sr, and the Max. it. 9: while (it. < Max. it.) do 10: Randomly calculate . 11: v← 12: v← 13: if (∣x≤ Sr) then 14: is 15: else 16: ip 17: end if 18: Randomly select positive or negative v. 19: 20: if (rand >v) then 21: 22: end if 23: Constrain x if needed. 24: Obtain the new fitness values. 25: Actualize x and x 26: it.← it.++ 27: end while 28: Postprocessing and visualization of results. |
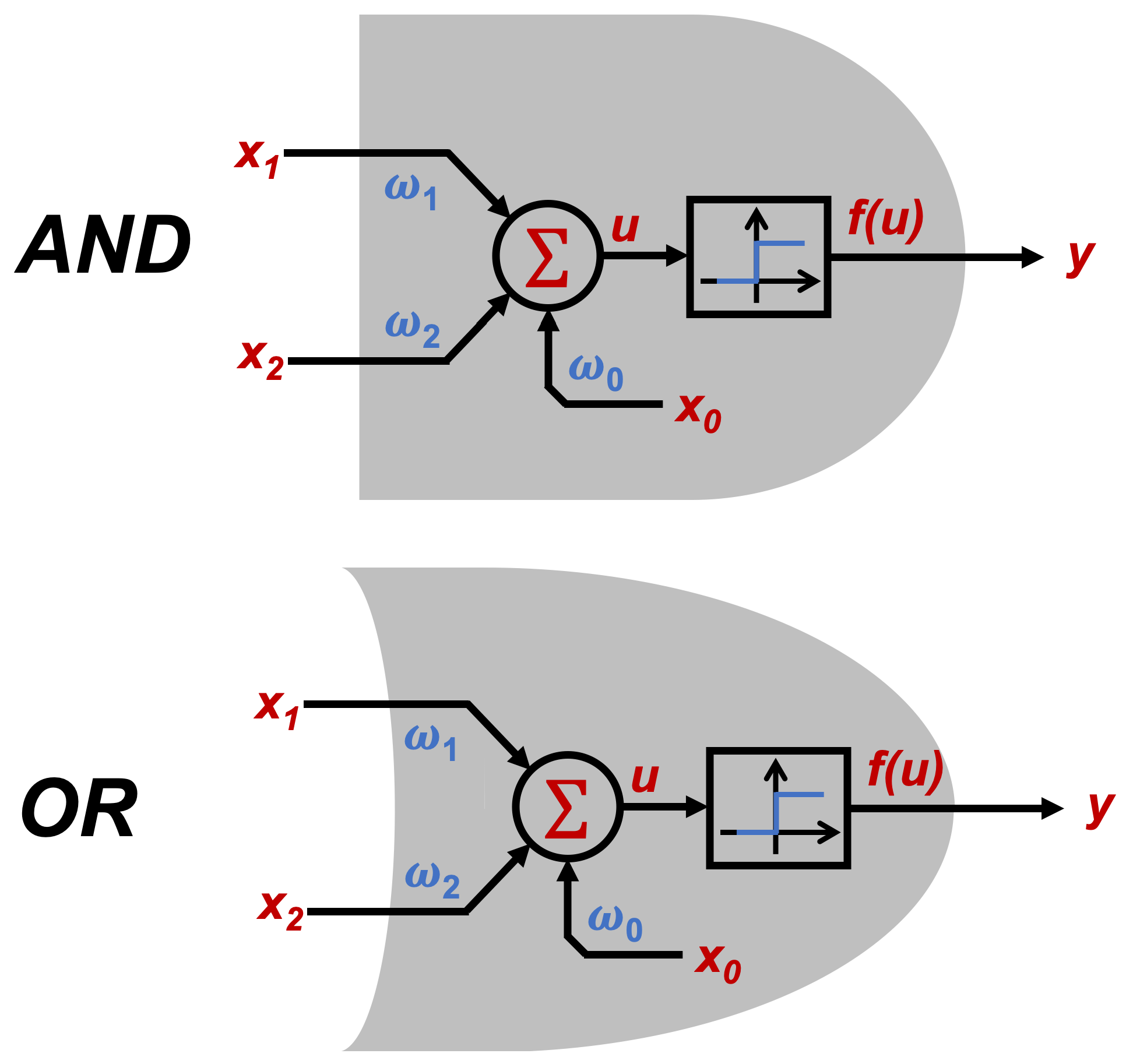
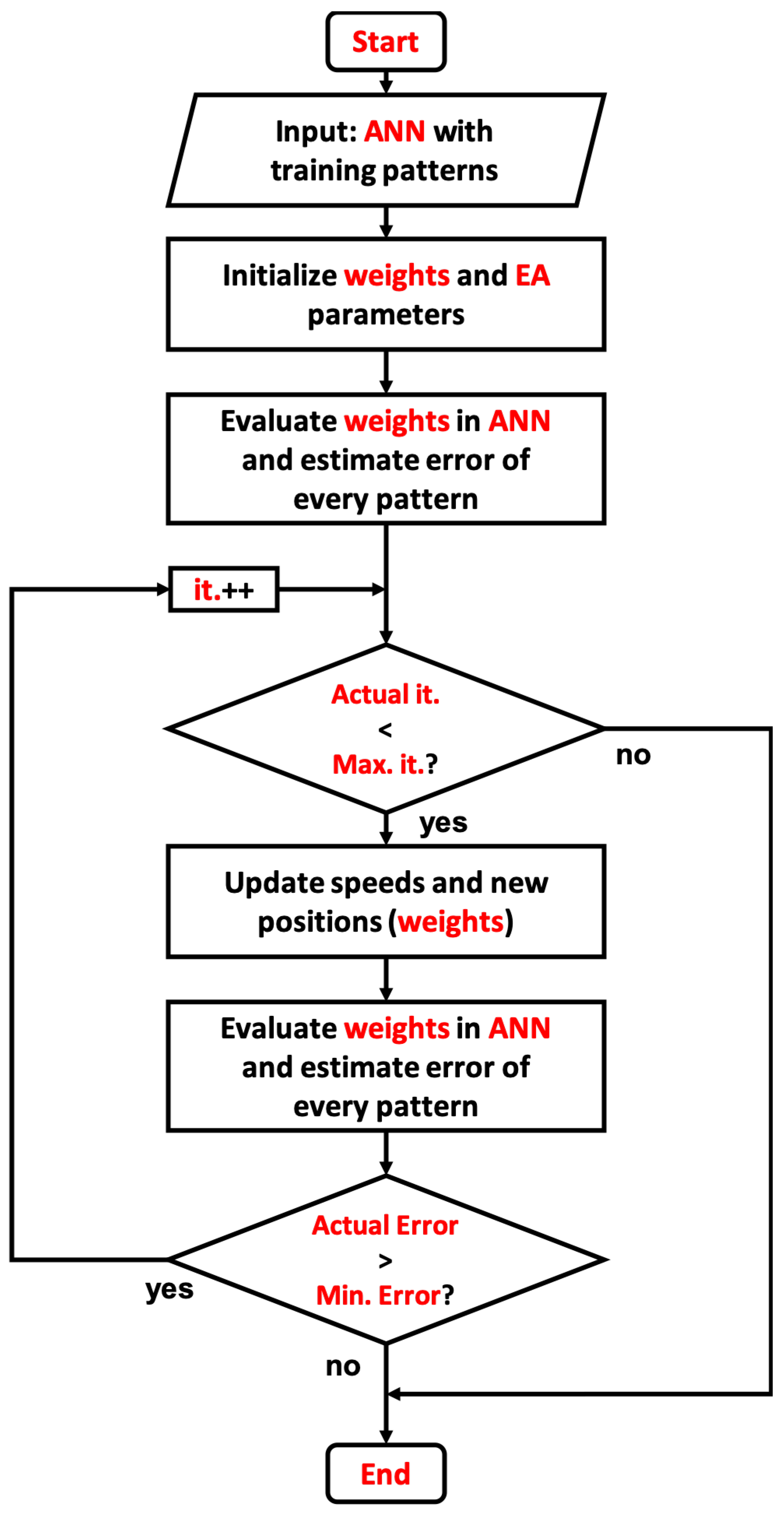
ANN Training Using EA
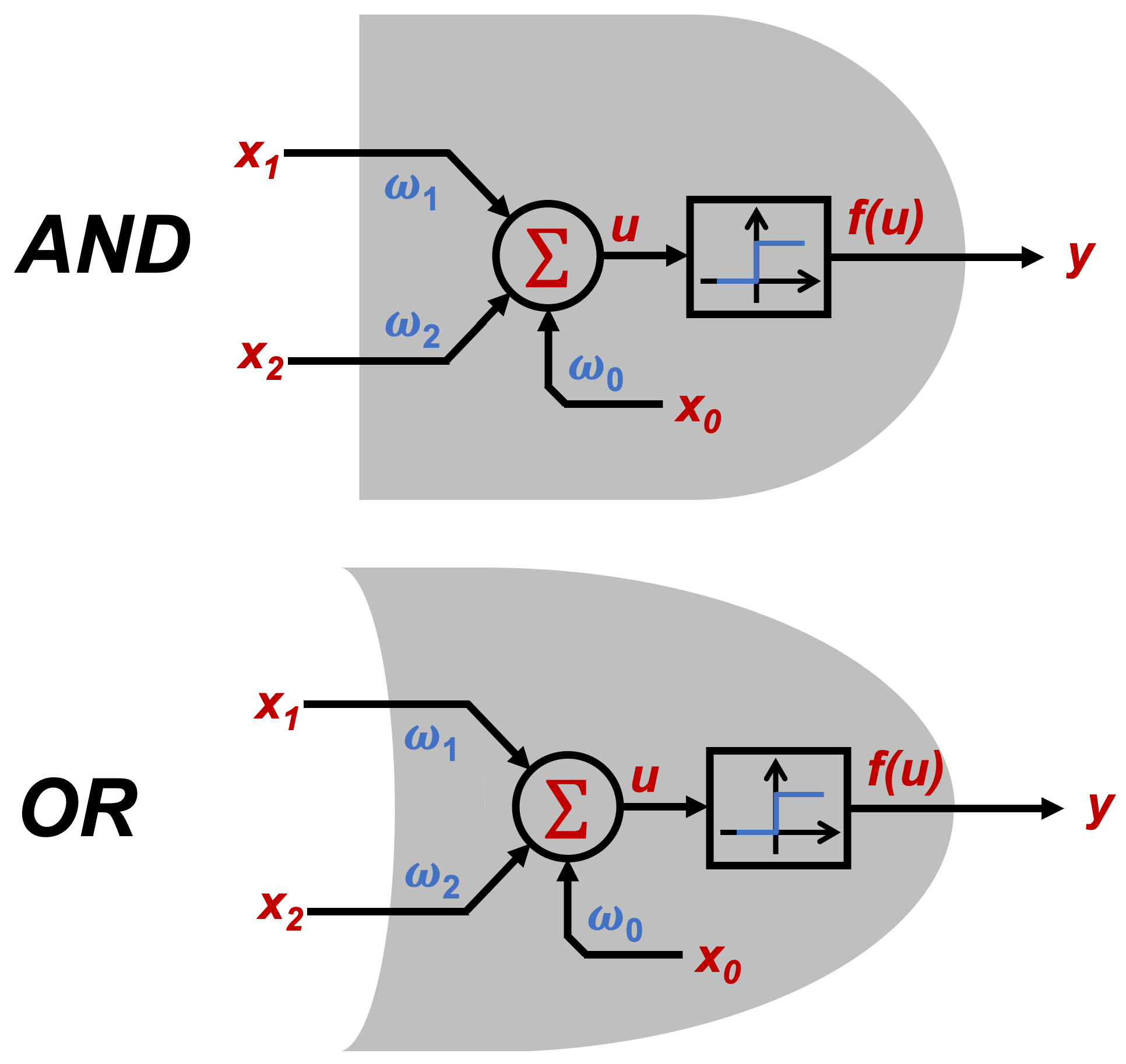
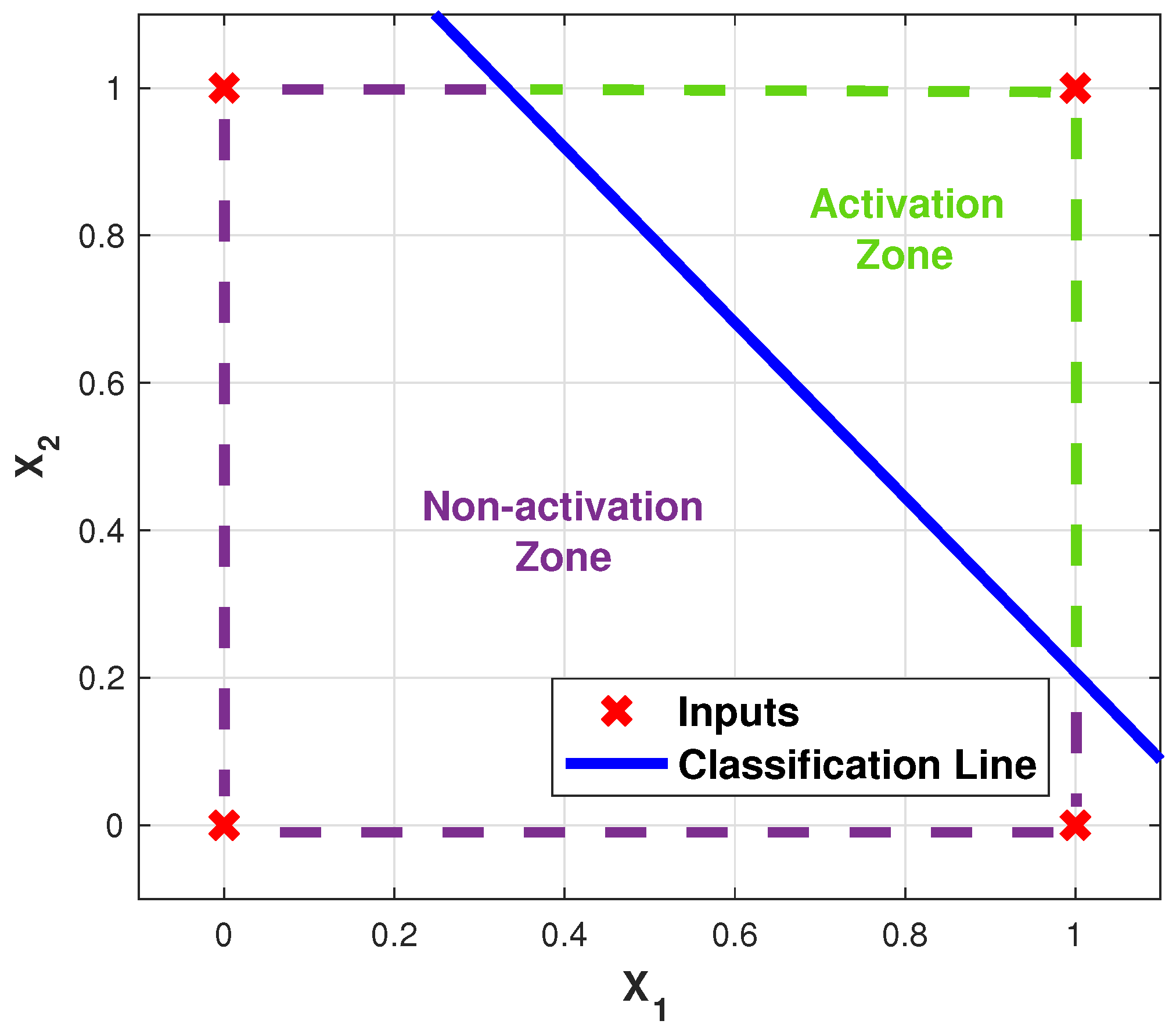
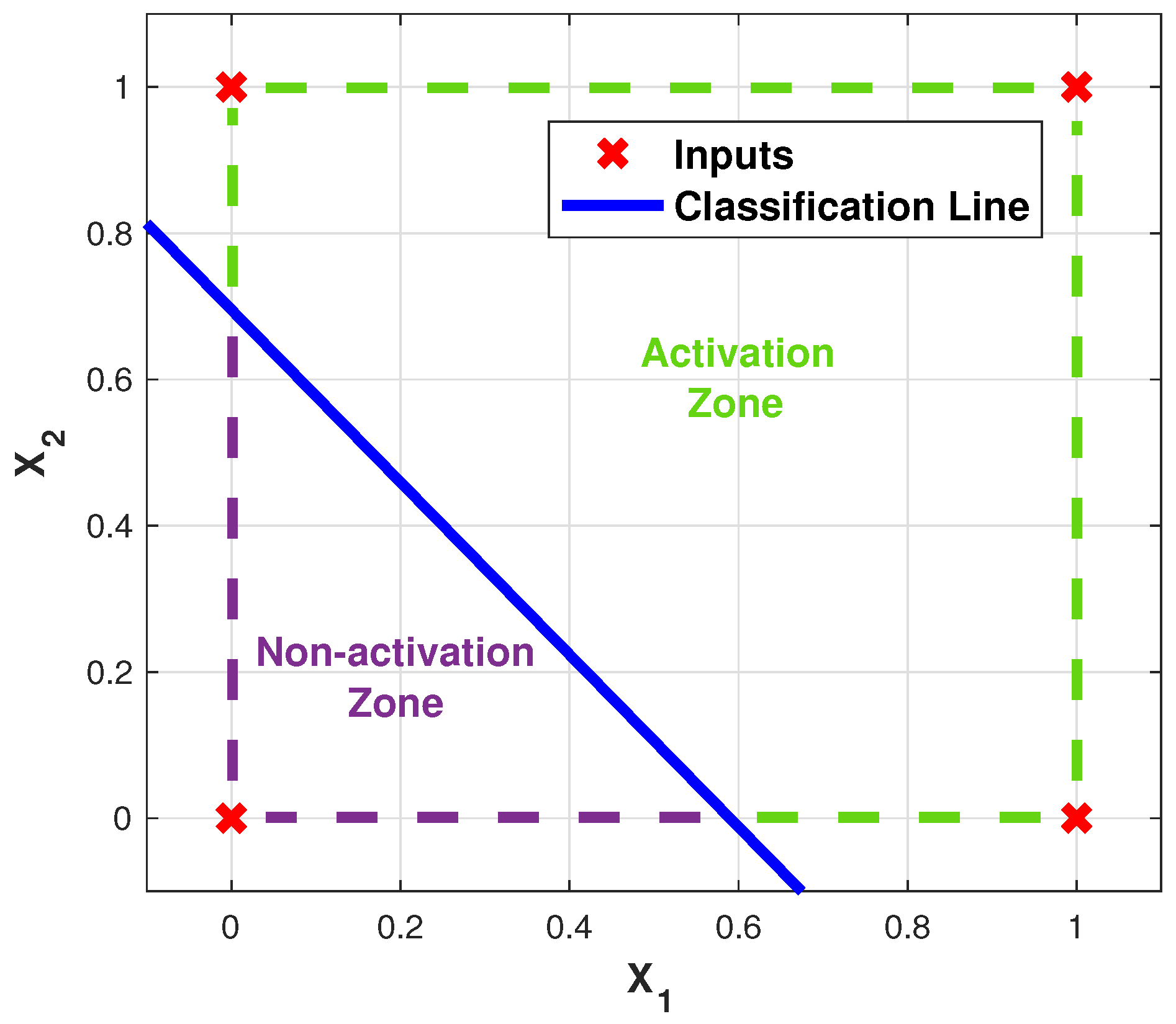
- AND: Logic gate that is activated when all its inputs are in true state.
- OR: Logic gate that is ON when any of its inputs are in true state.
- NOT: Logic gate whose output is always inverted from the input.
| Algorithm 2 Pseudocode of the EA for ANN training process. |
| 1: Define Training patterns for the ANN. 2: Initialize population of epicenters (weights for the ANN). 3: Randomly initialize x. 4: Initialize v and . 5: Define and . 6: Obtain and rank the first fitness values through the ANN results. 7: Initialize x and x with the fitness values. 8: Define Sr, and the Max. it. 9: while (it. < Max. it.) do 10: Randomly calculate . 11: v← 12: v← 13: if (∣x≤ Sr) then 14: is 15: else 16: ip 17: end if 18: Randomly select positive or negative v. 19: 20: if (rand >v) then 21: 22: end if 23: Constrain x if needed. 24: Obtain the new fitness values. 25: Actualize x and x 26: it.← it.++ 27: end while 28: Postprocessing and visualization of results. |
4. Mobile Phone Usage Detection while Driving
4.1. Theoretical Background
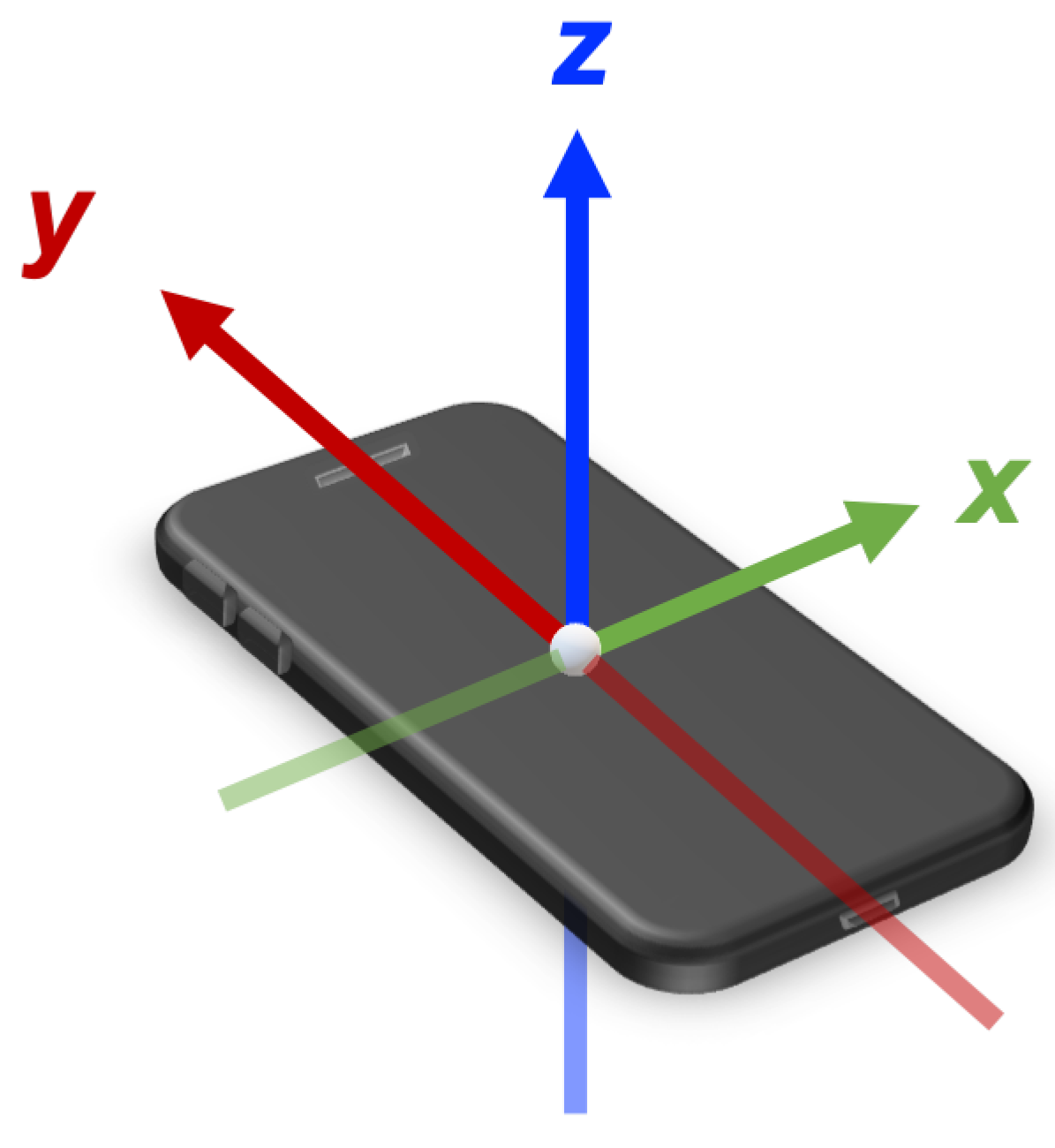
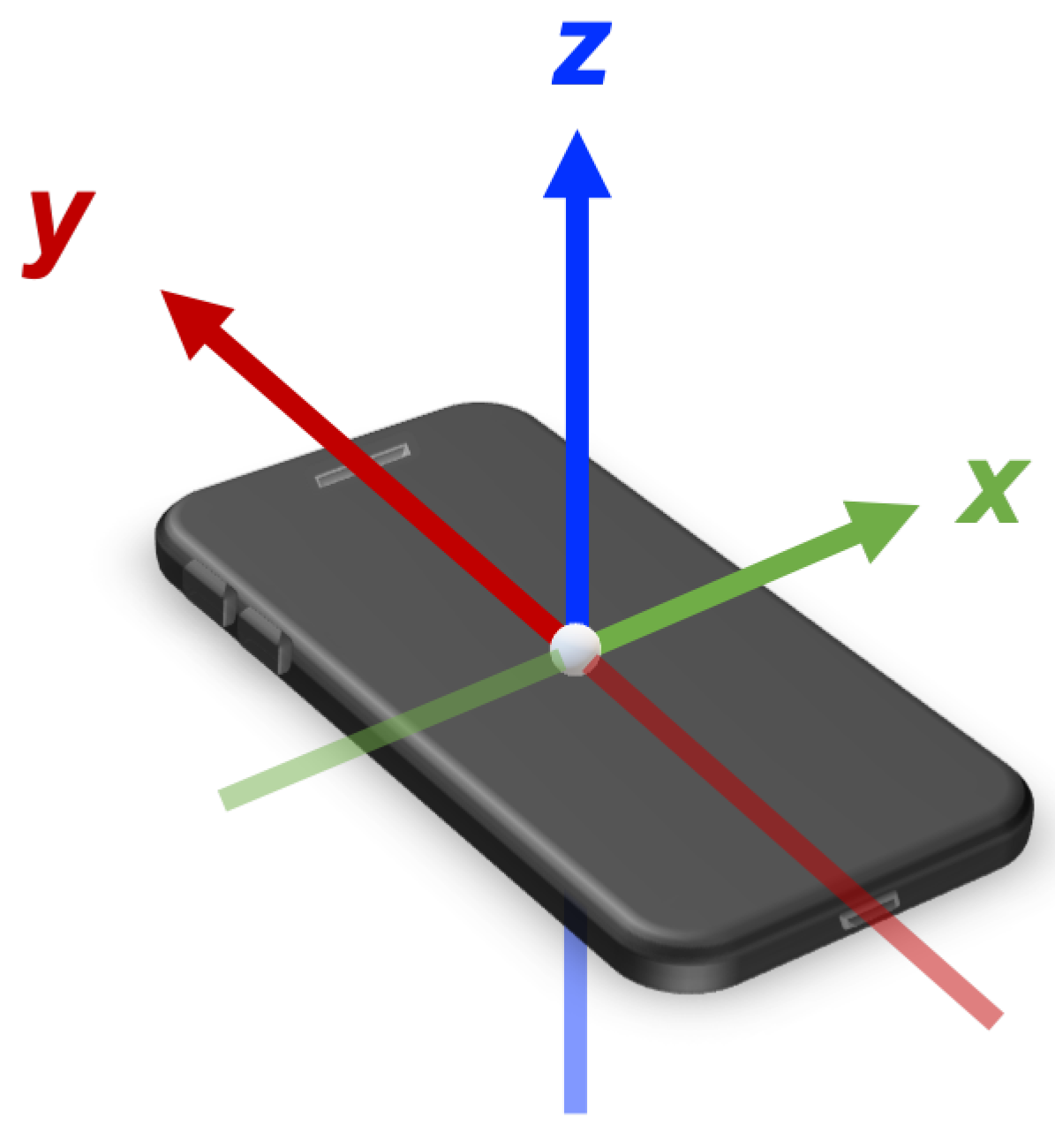
4.1.1. Accelerometer on Android©
4.1.2. GPS on Android©
- android.permission.ACCESS_COARSE_LOCATION
- android.permission.ACCESS_FINE_LOCATION
4.2. System Design and Implementation
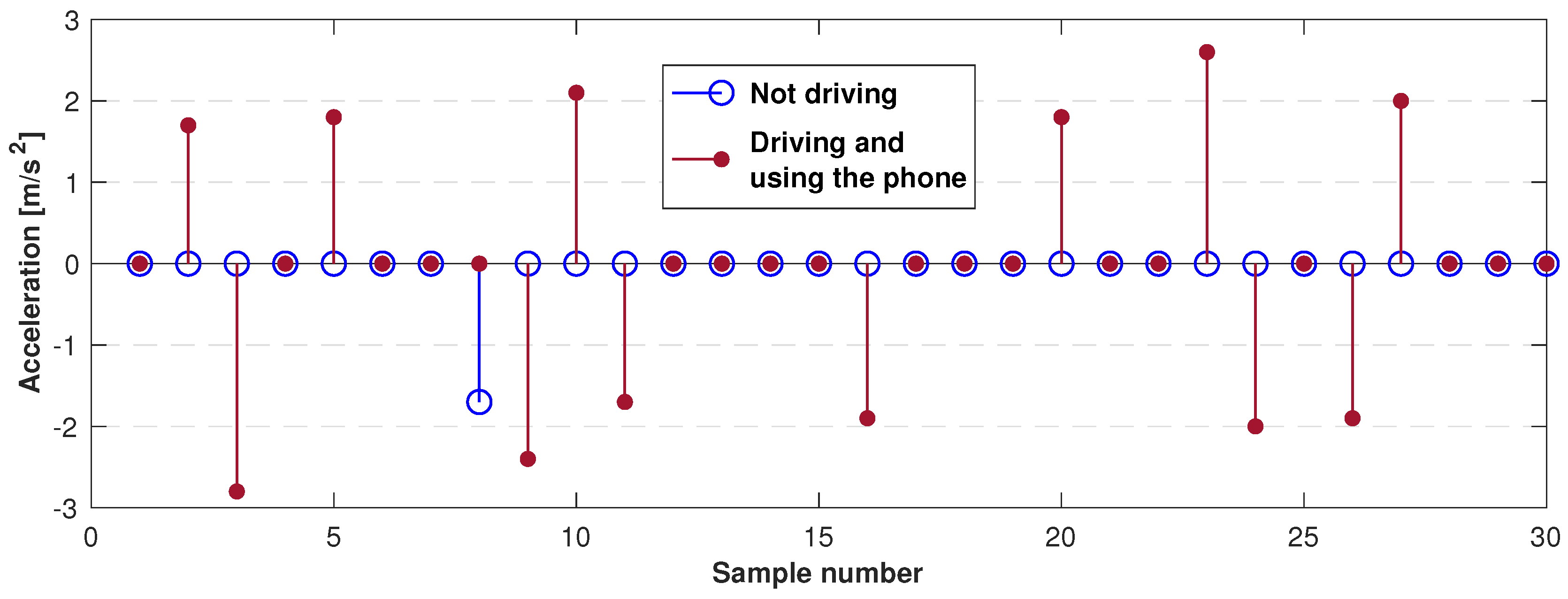
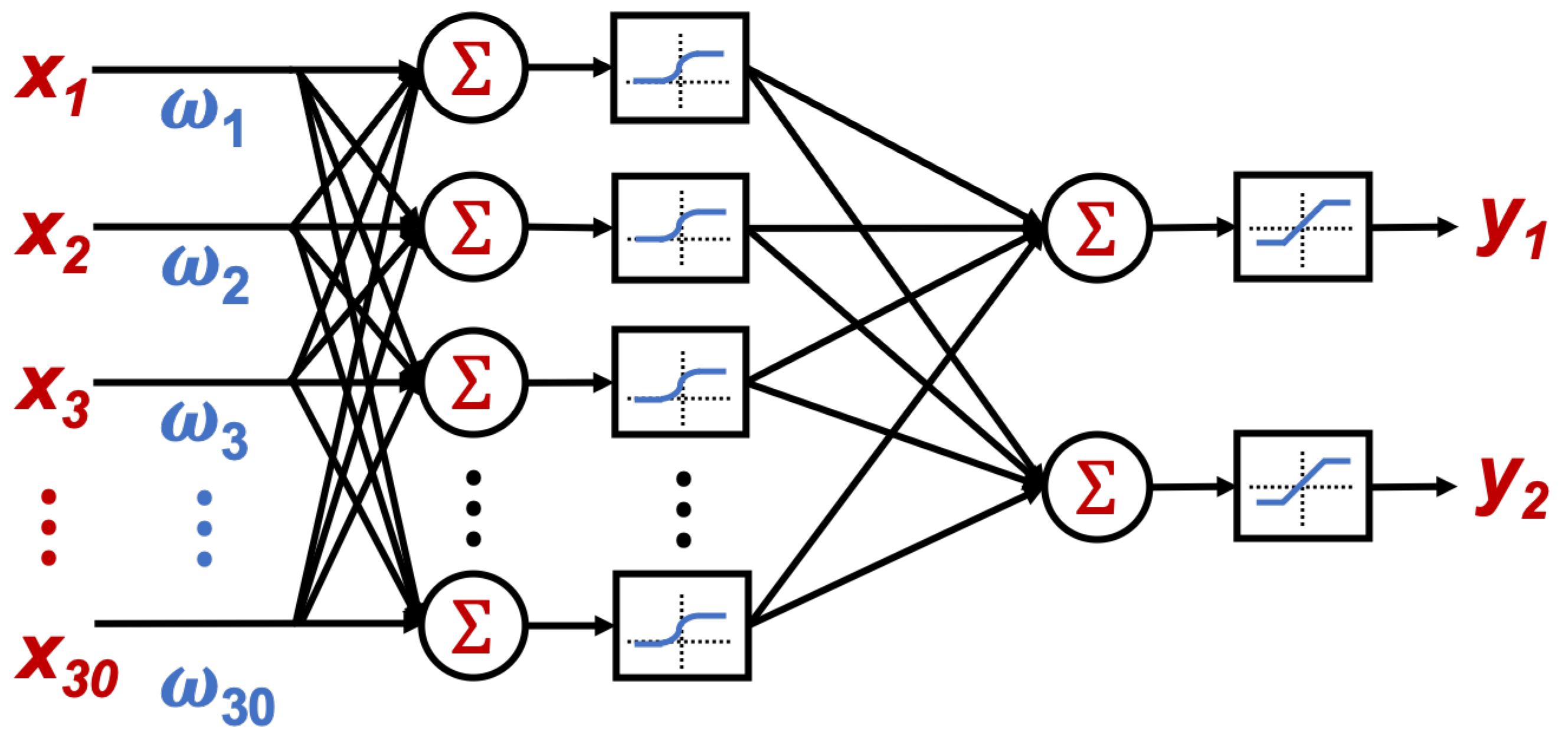
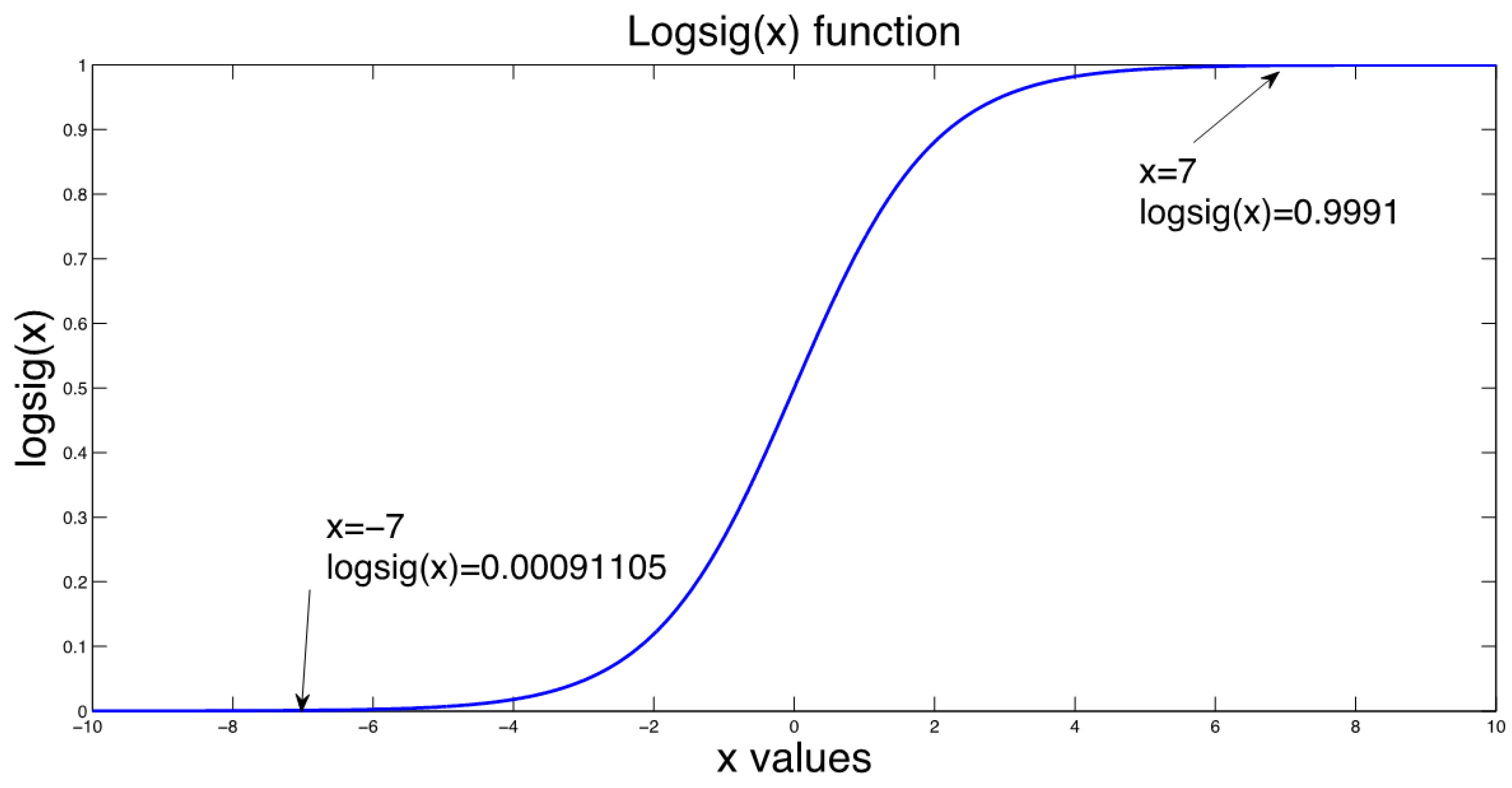
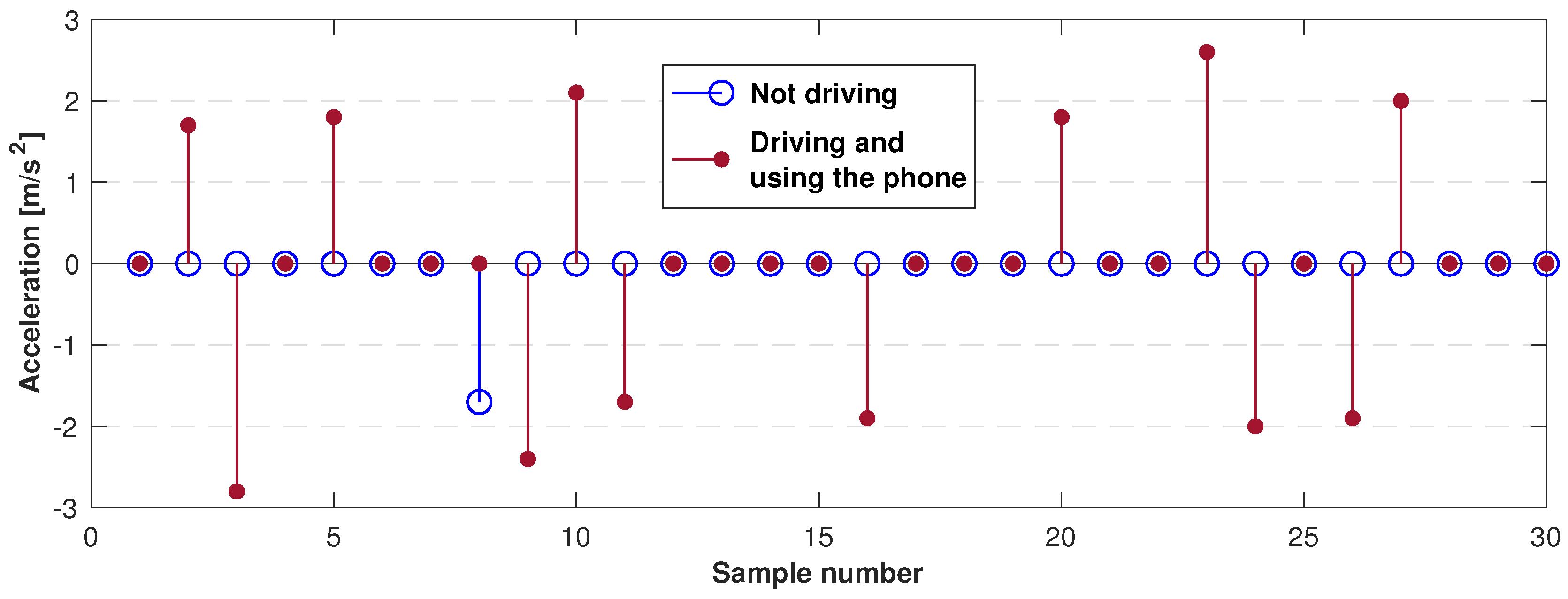
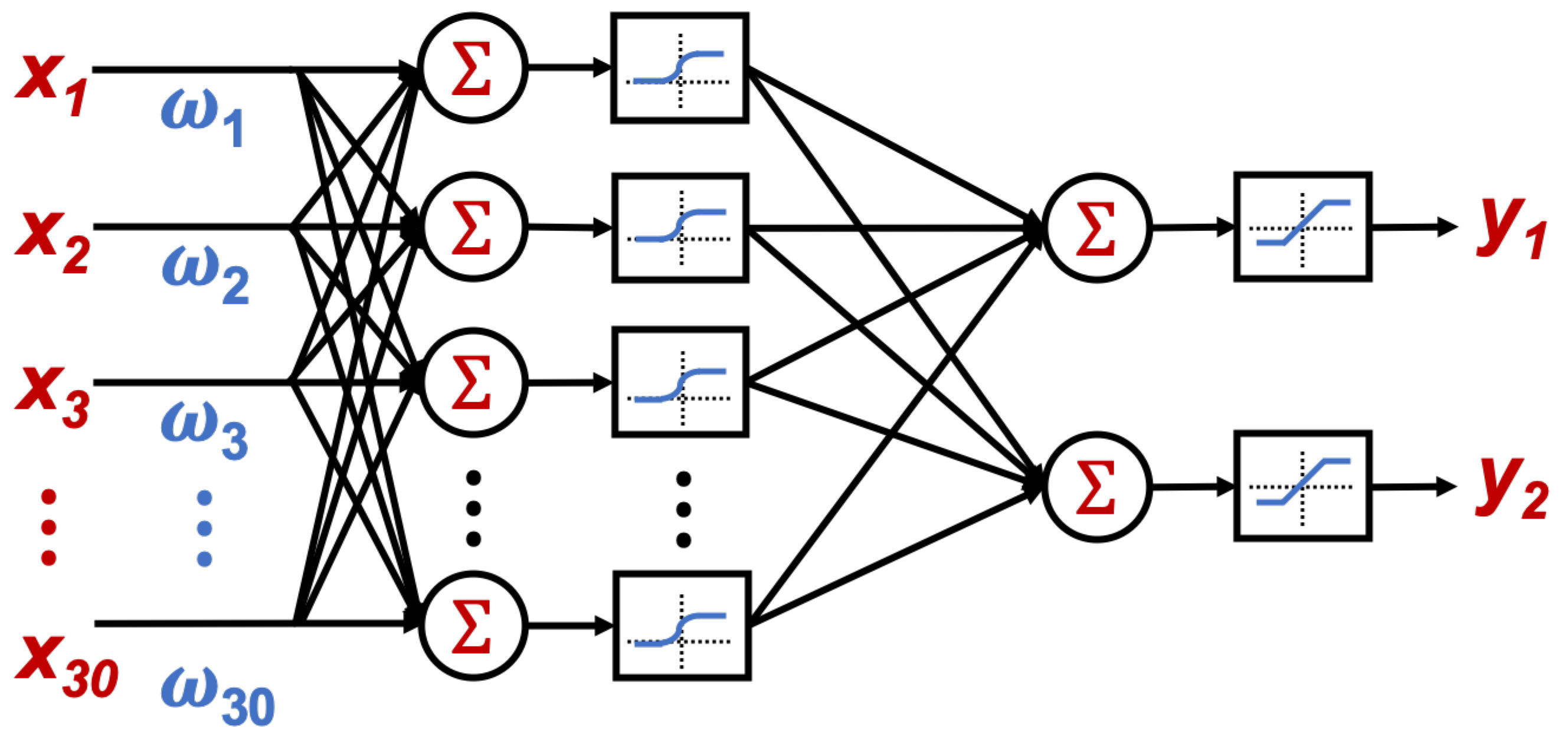
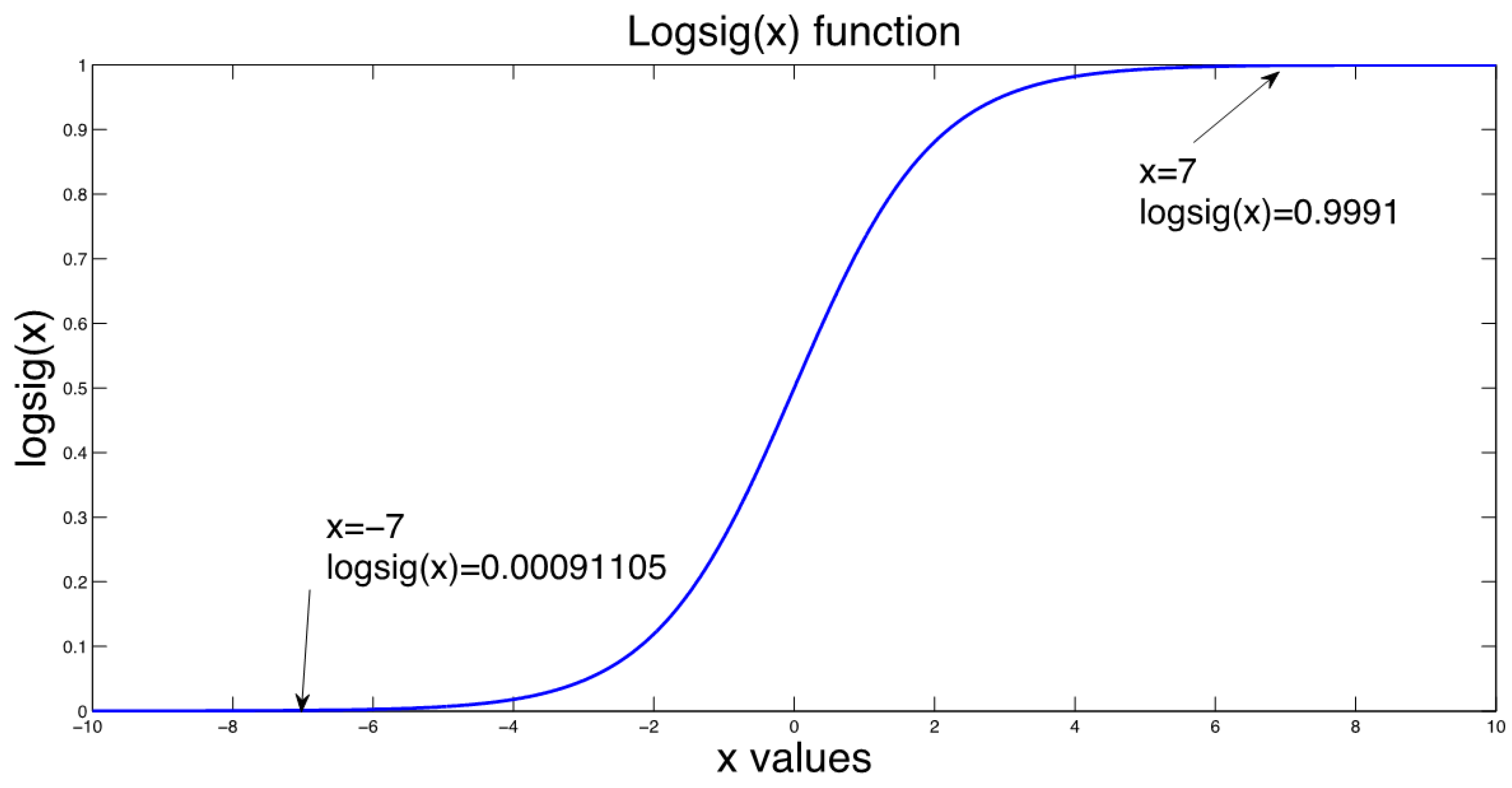
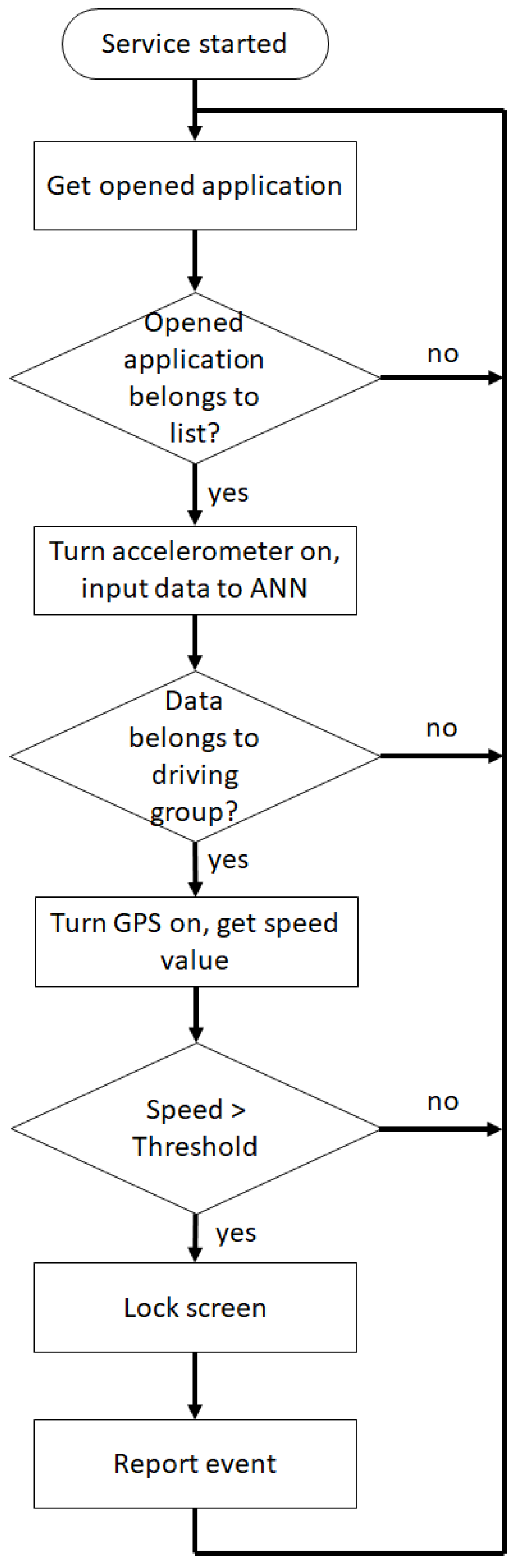
- Detect unusual behavior when using the phone: The proposed ANN classification for the task in the app must be able to run in the background; therefore, it must be implemented as a service. In this service, the application reads the acceleration values registered by the phone, the acquired values are not continuous data to reduce battery consumption. The data from the acceleration is only acquired when several applications are being used, where the applications that will be monitored to detect their use are summarized in Table 2.If any of the applications in Table 2 is in use, the phone accelerometer is turned on to register acceleration values and determine if the driver is using the phone. This classification is made using an artificial neural network which is trained by the EA described above.To train the artificial neural network, vectors containing 30 acceleration samples each were used. Two groups of data with similar characteristics on each group were defined. One group corresponds to the acceleration values when using the phone while driving, and the second group corresponds to the acceleration values when doing anything else. To obtain these samples as close as possible to reality, they were collected on a real texting-and-driving scenario. The acceleration values experienced by the phone were recorded while the car traveled between 10 and 100 km/h and the driver was using the phone. In total, more than 780 acceleration vectors were collected.The collected acceleration values are recorded in their positive and negative values. The difference between the two groups can be seen in Figure 11.Once the ANN was trained and the weights and bias values obtained, the obtained network is a feed-forward ANN with back-propagation with 30 neurons in the input layer, one hidden layer with 30 neurons and a sigmoid activation function and finally, the output layer with two neurons and linear activation function as shown in Figure 12.Once the artificial neural network has been trained, it was implemented on the mobile phone. To perform the portability of the neural network to the cellphone, the resultant weight and bias values were stored in arrays, where the activation function sigmoid was also stored in an array by taking its resultant values in the interval from −7 to 7. Therefore, to evaluate the function for a given value, the index from the array of the value must be looked-up to get the result. The selected range for the look-up table (−7 to 7), was taken by the fact that the proposed sigmoid function values correspond almost to saturation as seen in Figure 13.
- Determine if the phone is experiencing speed: After the unusual behavior when using the phone detection, if the artificial neural network determines that the input data is classified into the group of driving and using the phone, the GPS is turned on to verify the speed of the phone. The GPS was set to report location updates using a 500 millisecond sampling time, and updating the distance every single traveled meter.
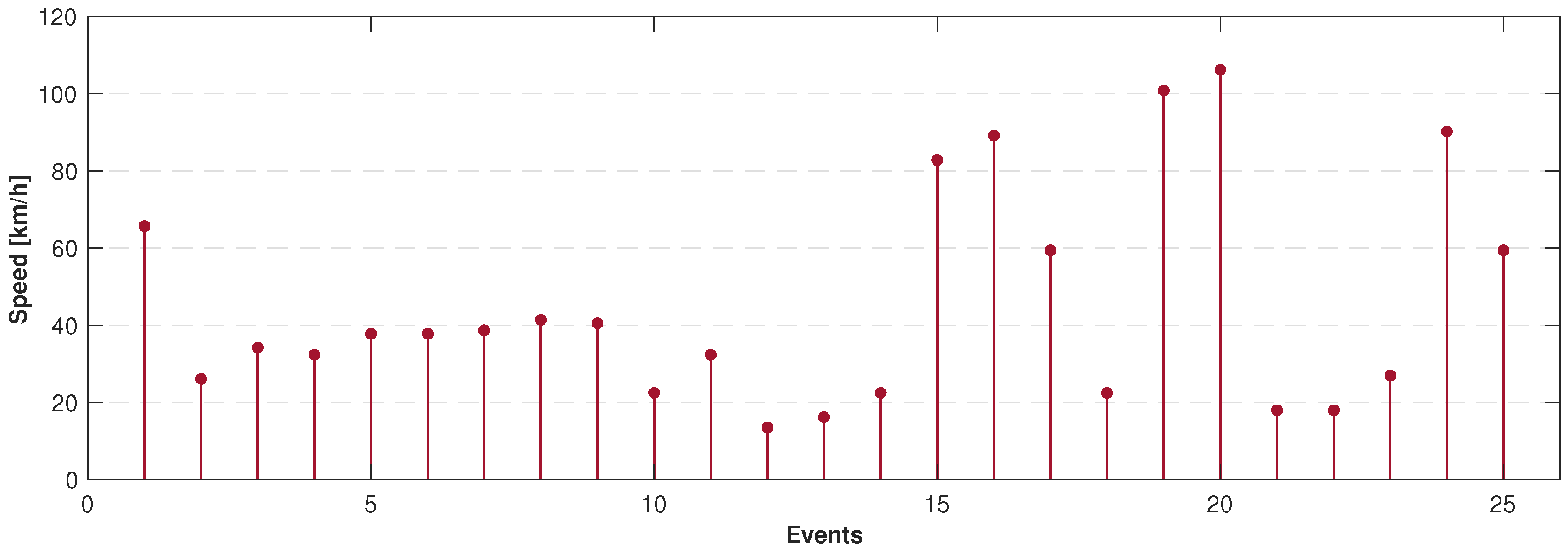
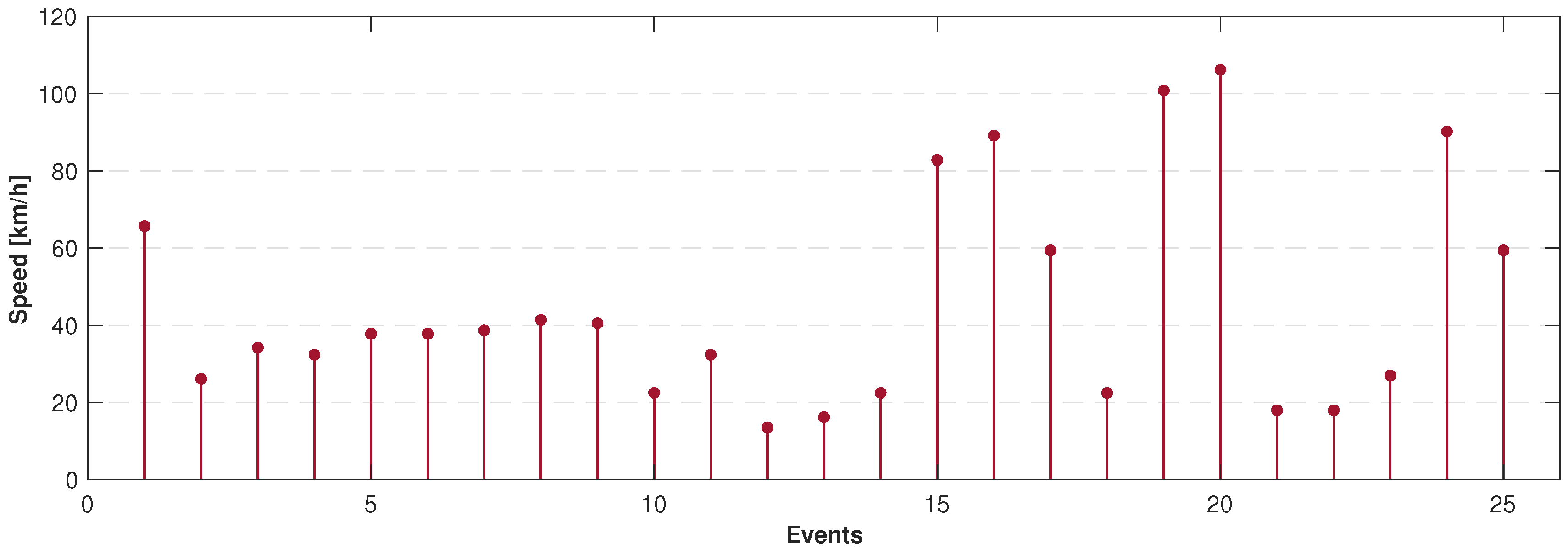
- Notify the user: The next step to be followed is if the GPS determines that the phone has speed and it is greater than a threshold speed (15 km/h), the phone screen must be locked and the event must be reported to a database in order to quantify them.On the other hand, if the phone does not have speed or the speed is less than the threshold speed, the application must turn off the GPS and do nothing else.For this task, the application must have administrator permission to lock the screen whenever it detects the use of the phone while driving. This permission must be requested by the application on start, and later granted by the user.
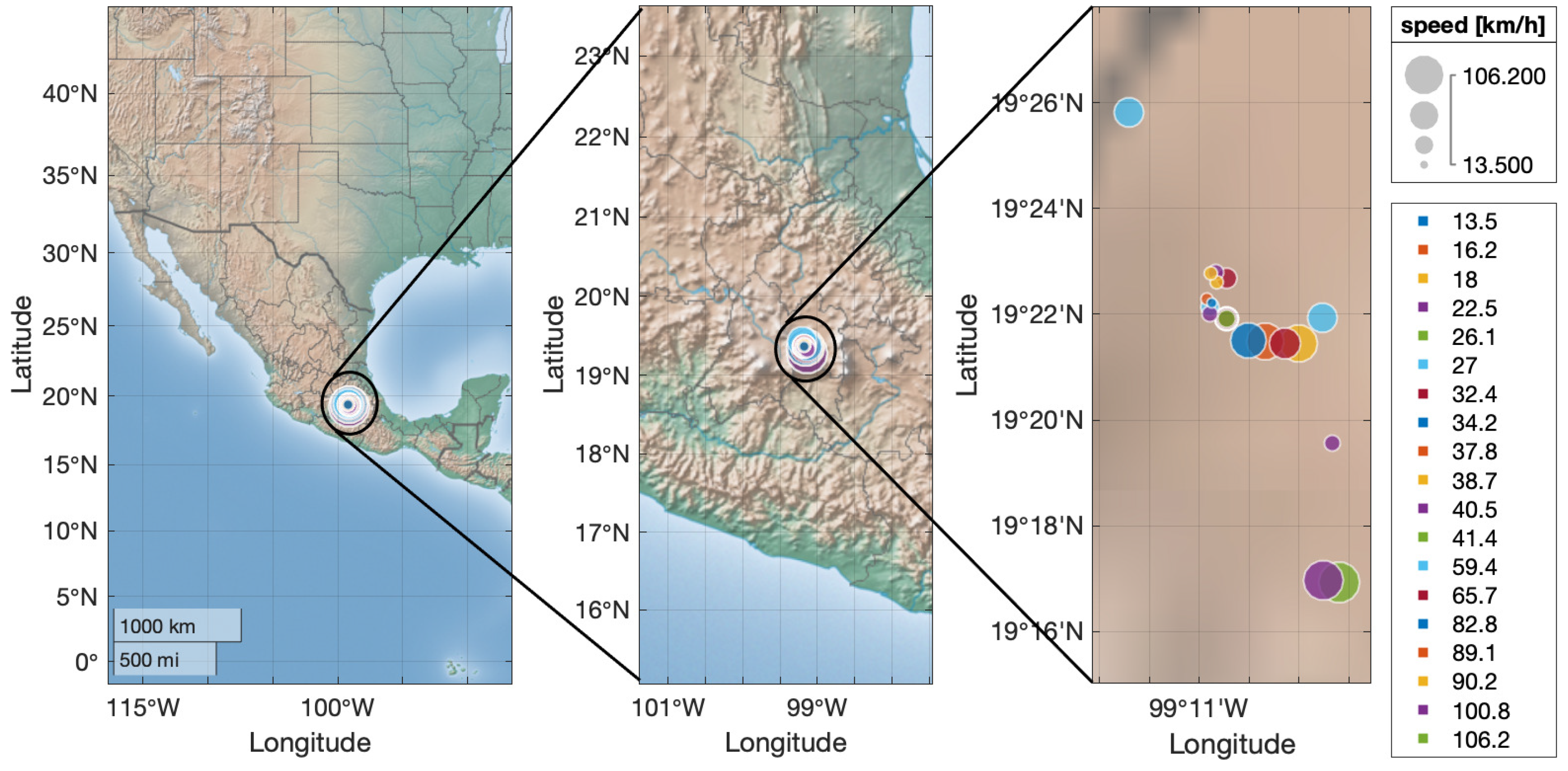
- Notify the event to a higher entity: Finally, the information is sent to the database by a request of type Post, where the sent data corresponds to the date and hour when the event took place, the speed registered, and also the location with latitude and longitude where it happened.This information is stored in a table inside the database, where the data modification inside the table is done via a .php file stored in the domain.
5. Results
5.1. ANN Logic Gates
5.2. Mobile Phone Usage Detection
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chen, H.; Roco, M.C.; Son, J. Nanotechnology Public Funding and Impact Analysis: A Tale of Two Decades (1991–2010). IEEE Nanotechnol. Mag. 2013, 7, 9–14. [Google Scholar] [CrossRef]
- Roco, M.C. Nanotechnology progress and future opportunities: 2000–2020. In Proceedings of the 10th IEEE International Conference on Nanotechnology, Ilsan, Korea, 17–20 August 2010; pp. 11–12. [Google Scholar]
- Jakupović, A.; Kovačević, Ž.; Gurbeta, L.; Badnjević, A. Review of artificial neural network application in nanotechnology. In Proceedings of the 2018 7th Mediterranean Conference on Embedded Computing (MECO), Budva, Montenegro, 10–14 June 2018; pp. 1–4. [Google Scholar]
- Martínez-Nieto, J.A.; Medrano-Marqués, N.; Sanz-Pascual, M.T.; Calvo-López, B. High-Level Modeling and Simulation Tool for Sensor Conditioning Circuit Based on Artificial Neural Networks. Sensors 2019, 19, 1814. [Google Scholar] [CrossRef] [PubMed]
- Chi, K.; Zhu, Y.h.; Jiang, X.; Tian, X. Optimal coding for transmission energy minimization in wireless nanosensor networks. Nano Commun. Netw. 2013, 4, 120–130. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Jornet, J.M. Electromagnetic wireless nanosensor networks. Nano Commun. Netw. 2010, 1, 3–19. [Google Scholar] [CrossRef]
- Nanosensors Group. Smartphone Biosensors. Available online: https://nano.ece.illinois.edu/research-smartphone-biosensors/smartphone-biosensors/ (accessed on 17 May 2019).
- Majumder, S.; Deen, M.J. Smartphone Sensors for Health Monitoring and Diagnosis. Sensors 2019, 19, 2164. [Google Scholar] [CrossRef] [PubMed]
- J.S. Virginia Tech Transportation Institute. April Is Distracted Driving Awareness Month. Available online: https://www.vtti.vt.edu/featured/?p=199 (accessed on 11 February 2018).
- Governors Highway Safety Association. Distracted Driving Laws. Available online: https://www.ghsa.org/state-laws/issues/Distracted-Driving (accessed on 13 May 2019).
- The Citizen Portal of the Government of the Mexico City. Metropolitan Transit Regulation. Available online: http://data.ssp.cdmx.gob.mx/reglamentodetransito/ (accessed on 11 February 2019).
- Mohammadi, M.; Eshghi, M.; Haghparast, M.; Bahrololoom, A. Design and optimization of reversible BCD adder/subtractor circuit for quantum and nanotechnology based systems. World Appl. Sci. J. 2008, 4, 787–792. [Google Scholar]
- Widrow, B.; Lehr, M.A. 30 years of adaptive neural networks: Perceptron, madaline, and backpropagation. Proc. IEEE 1990, 78, 1415–1442. [Google Scholar] [CrossRef]
- Atiquzzaman, M.; Qi, Y.; Fries, R. Real-time detection of drivers’ texting and eating behavior based on vehicle dynamics. Transp. Res. Part F Traffic Psychol. Behav. 2018, 58, 594–604. [Google Scholar] [CrossRef]
- Khalil, R.T.; Khalifeh, A.F.; Darabkh, K.A. Mobile-free driving with Android phones: System design and performance evaluation. In Proceedings of the International Multi-Conference on Systems, Signals Devices, Chemnitz, Germany, 20–23 March 2012; pp. 1–6. [Google Scholar]
- Fazeen, M.; Gozick, B.; Dantu, R.; Bhukhiya, M.; González, M.C. Safe Driving Using Mobile Phones. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1462–1468. [Google Scholar] [CrossRef]
- Dai, J.; Teng, J.; Bai, X.; Shen, Z.; Xuan, D. Mobile phone based drunk driving detection. In Proceedings of the 2010 4th International Conference on Pervasive Computing Technologies for Healthcare, Munich, Germany, 22–25 March 2010; pp. 1–8. [Google Scholar]
- Watkins, M.L.; Amaya, I.A.; Keller, P.E.; Hughes, M.A.; Beck, E.D. Autonomous detection of distracted driving by cell phone. In Proceedings of the 2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 1960–1965. [Google Scholar]
- Osann, R., Jr. System for Preventing Text Messaging while Driving. U.S. Patent 8,295,854, 23 October 2012. [Google Scholar]
- Hopkins, J.C., III. Systems and Methods for Automatically Disabling Mobile Device Usage while Driving. U.S. Patent 8,428,973, 23 April 2013. [Google Scholar]
- Inselberg, E. System for Selectively Disabling Cell Phone Text Messaging Function. U.S. Patent 8,401,578, 19 March 2013. [Google Scholar]
- Agatonovic-Kustrin, S.; Beresford, R. Basic concepts of artificial neural network (ANN) modeling and its application in pharmaceutical research. J. Pharm. Biomed. Anal. 2000, 22, 717–727. [Google Scholar] [CrossRef]
- Cruz, P.P.; Herrera, A. Inteligencia Artificial con Aplicaciones a la Ingeniería; Alfaomega: Mexico City, Mexico, 2010. [Google Scholar]
- Shaikh, K.B.T. Smart Sensor Using Function Approximation. In Proceedings of the 2nd IEEE International Conference on Recent Trends in Electronics, Information Communication Technology (RTEICT), Bengaluru, India, 19–20 May 2017; pp. 1226–1229. [Google Scholar]
- Karaboga, T.; Canyilmaz, M.; Ozcan, O. Investigation of the relationship between ionospheric foF2 and earthquakes. Adv. Space Res. 2018, 61, 2022–2030. [Google Scholar] [CrossRef]
- Olson, E.L.; Allen, R.M. The deterministic nature of earthquake rupture. Nature 2005, 438, 212. [Google Scholar] [CrossRef] [PubMed]
- Bormann, P.; Engdahl, B.; Rainer, K. Seismic Wave Propagation and Earth Models; Deutsches Geo Forschungs Zentrum GFZ: Potsdam, Germany, 2009. [Google Scholar]
- Allaby, M. Dictionary of Geology and Earth Sciences; Oxford University Press: Oxford, UK, 2013. [Google Scholar]
- Bormann, P. New Manual of Seismological Observatory Practice (NMSOP-2); GFZ German Research Centre for Geosciences: Potsdam, Germany, 2002; Volume 2. [Google Scholar]
- Ponce, P.; Molina, A. Earthquake Optimization Method: An Internal Research Report during the Project; Tecnologico de Monterrey; Binational Laboratory: Mexico City, Mexico, 2018. [Google Scholar]
- Mendez, E.; Ortiz, A.; Ponce, P.; Molina, A. Electric machines control optimization by a novel geo-inspired earthquake metaheuristic algorithm. In Proceedings of the 2018 Nanotechnology for Instrumentation and Measurement (NANOfIM), Mexico City, Mexico, 7–8 November 2018; pp. 1–6. [Google Scholar]
- Casilari, E.; Luque, R.; Morón, M.J. Analysis of android device-based solutions for fall detection. Sensors 2015, 15, 17827–17894. [Google Scholar] [CrossRef] [PubMed]
- Android Developers. Sensor Event. Available online: https://developer.android.com/reference/android/hardware/SensorEvent (accessed on 4 February 2019).
- Cervantes-Villanueva, J.; Carrillo-Zapata, D.; Terroso-Saenz, F.; Valdes-Vela, M.; Skarmeta, A. Vehicle maneuver detection with accelerometer-based classification. Sensors 2016, 16, 1618. [Google Scholar] [CrossRef] [PubMed]
- Khandakar, A.; Chowdhury, M.E.; Ahmed, R.; Dhib, A.; Mohammed, M.; Al-Emadi, N.A.; Michelson, D. Portable system for monitoring and controlling driver behavior and the use of a mobile phone while driving. Sensors 2019, 19, 1563. [Google Scholar] [CrossRef] [PubMed]
- Gogoi, N.; Minetto, A.; Linty, N.; Dovis, F. A Controlled-Environment Quality Assessment of Android GNSS Raw Measurements. Electronics 2019, 8, 5. [Google Scholar] [CrossRef]
- Gironés, J.T. El Gran Libro de Android; Marcombo: Barcelona, Spain, 2012. [Google Scholar]
- Taghvaeeyan, S.; Rajamani, R. Portable roadside sensors for vehicle counting, classification, and speed measurement. IEEE Trans. Intell. Transp. Syst. 2013, 15, 73–83. [Google Scholar] [CrossRef]
- Markevicius, V.; Navikas, D.; Idzkowski, A.; Andriukaitis, D.; Valinevicius, A.; Zilys, M. Practical methods for vehicle speed estimation using a microprocessor-embedded system with AMR Sensors. Sensors 2018, 18, 2225. [Google Scholar] [CrossRef] [PubMed]
- Statista. Most Popular Social Networks as of April 2019, Ranked by Number of Active User (in Millions). Available online: https://www.statista.com/statistics/272014/global-social-networks-ranked-by-number-of-users/ (accessed on 6 May 2019).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Logic Gate | Gate Symbol | Truth Table | ||
|---|---|---|---|---|
| AND |  | x1 | x2 | y |
| 0 | 0 | 0 | ||
| 0 | 1 | 0 | ||
| 1 | 0 | 0 | ||
| 1 | 1 | 1 | ||
| OR |  | x1 | x2 | y |
| 0 | 0 | 0 | ||
| 0 | 1 | 1 | ||
| 1 | 0 | 1 | ||
| 1 | 1 | 1 | ||
| Application | Number of Active Users |
|---|---|
| Whatsapp© | 1600 million (monthly) |
| Facebook© | 2320 million (monthly) |
| Facebook messenger© | 1300 million (monthly) |
| 1098 (monthly) |
| 0.8296 | 0.7061 | 0.5953 |
| 0.3386 | 0.5741 | 0.4869 |
| Membership Percentage | Network Response Success | |
|---|---|---|
| Not Driving | Driving and Using Phone | |
| >0.90 | 15.56 % | 52.55 % |
| >0.80 | 27.41 % | 65.69 % |
| >0.70 | 68.15 % | 72.26 % |
| >0.60 | 82.96 % | 78.10 % |
| Not Driving | Driving and Using the Phone |
|---|---|
| 100 % | 96.18 % |
| Latitude | Longitude | Speed |
|---|---|---|
| 19.3576 | –99.1548 | 65.7 |
| 19.3654 | –99.1741 | 26.1 |
| 19.3654 | –99.1741 | 34.2 |
| 19.3654 | –99.1741 | 32.4 |
| 19.3654 | –99.1741 | 37.8 |
| 19.3654 | –99.1741 | 37.8 |
| 19.3654 | –99.1741 | 38.7 |
| 19.3654 | –99.1741 | 41.4 |
| 19.3654 | –99.1741 | 40.5 |
| 19.3799 | –99.1777 | 22.5 |
| 19.378 | –99.1742 | 32.4 |
| 19.3703 | –99.179 | 13.5 |
| 19.3715 | –99.1808 | 16.2 |
| 19.3667 | –99.1796 | 22.5 |
| 19.3585 | –99.1669 | 82.8 |
| 19.3581 | –99.1613 | 89.1 |
| 19.3656 | –99.1422 | 59.4 |
| 19.3259 | –99.1389 | 22.5 |
| 19.2826 | –99.1418 | 100.8 |
| 19.2822 | –99.1365 | 106.2 |
| 19.3768 | –99.1774 | 18 |
| 19.3797 | –99.1794 | 18 |
| 19.369 | –99.1796 | 27 |
| 19.3574 | –99.1499 | 90.2 |
| 19.4304 | –99.2069 | 59.4 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mendez, E.; Ortiz, A.; Ponce, P.; Acosta, J.; Molina, A. Mobile Phone Usage Detection by ANN Trained with a Metaheuristic Algorithm †. Sensors 2019, 19, 3110. https://doi.org/10.3390/s19143110
Mendez E, Ortiz A, Ponce P, Acosta J, Molina A. Mobile Phone Usage Detection by ANN Trained with a Metaheuristic Algorithm †. Sensors. 2019; 19(14):3110. https://doi.org/10.3390/s19143110
Chicago/Turabian StyleMendez, Efrain, Alexandro Ortiz, Pedro Ponce, Juan Acosta, and Arturo Molina. 2019. "Mobile Phone Usage Detection by ANN Trained with a Metaheuristic Algorithm †" Sensors 19, no. 14: 3110. https://doi.org/10.3390/s19143110
APA StyleMendez, E., Ortiz, A., Ponce, P., Acosta, J., & Molina, A. (2019). Mobile Phone Usage Detection by ANN Trained with a Metaheuristic Algorithm †. Sensors, 19(14), 3110. https://doi.org/10.3390/s19143110