Robust Noise Suppression Technique for a LADAR System via Eigenvalue-Based Adaptive Filtering †

Abstract
:1. Introduction
2. Related Works
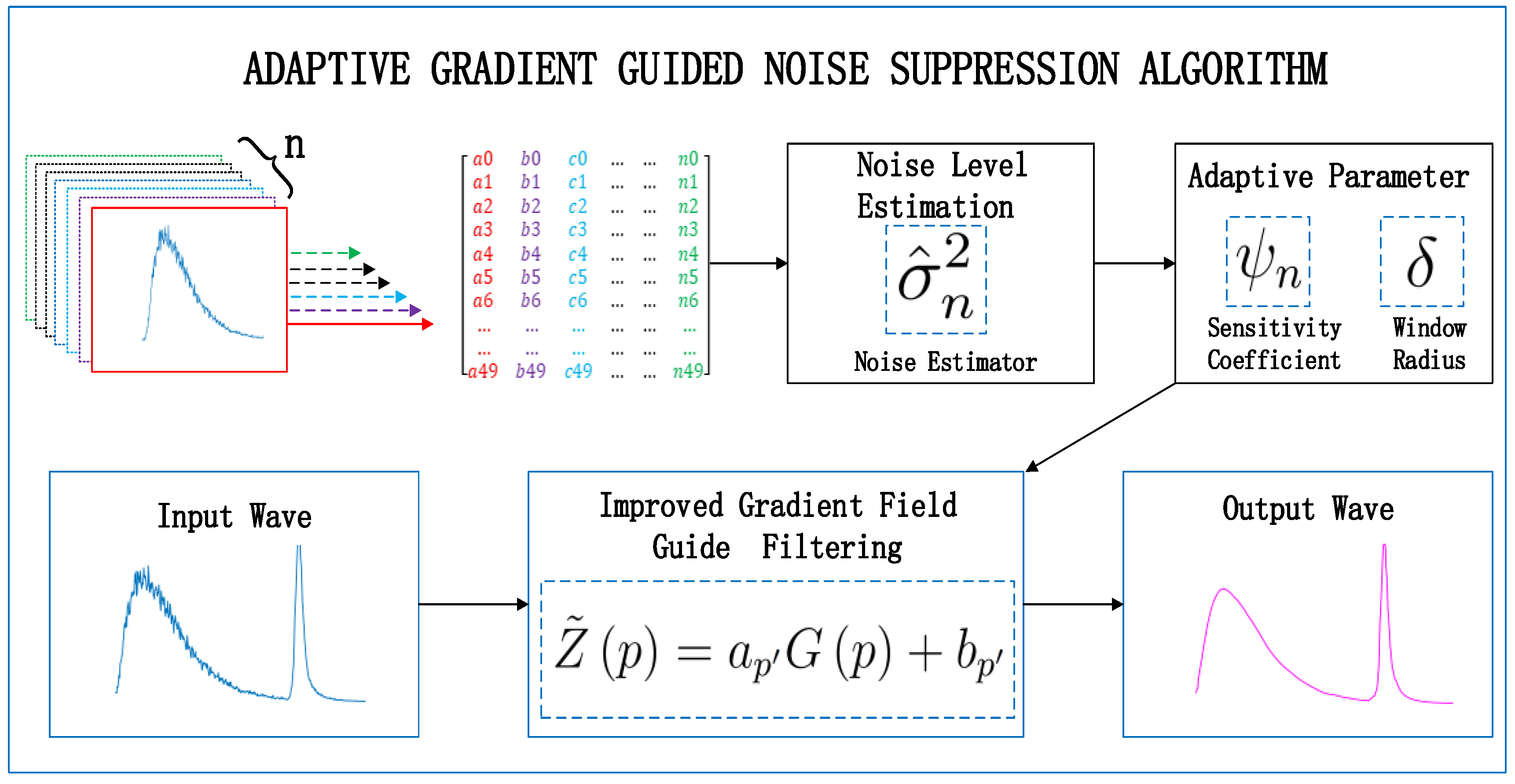
3. Adaptive Gradient-Guided Noise Suppression Technique
3.1. Gradient-Guided Filtering
3.2. Noise Level Estimation via Eigenvalue Analysis
| Algorithm 1 Noise suppression algorithm. |
|
4. Experimental Results
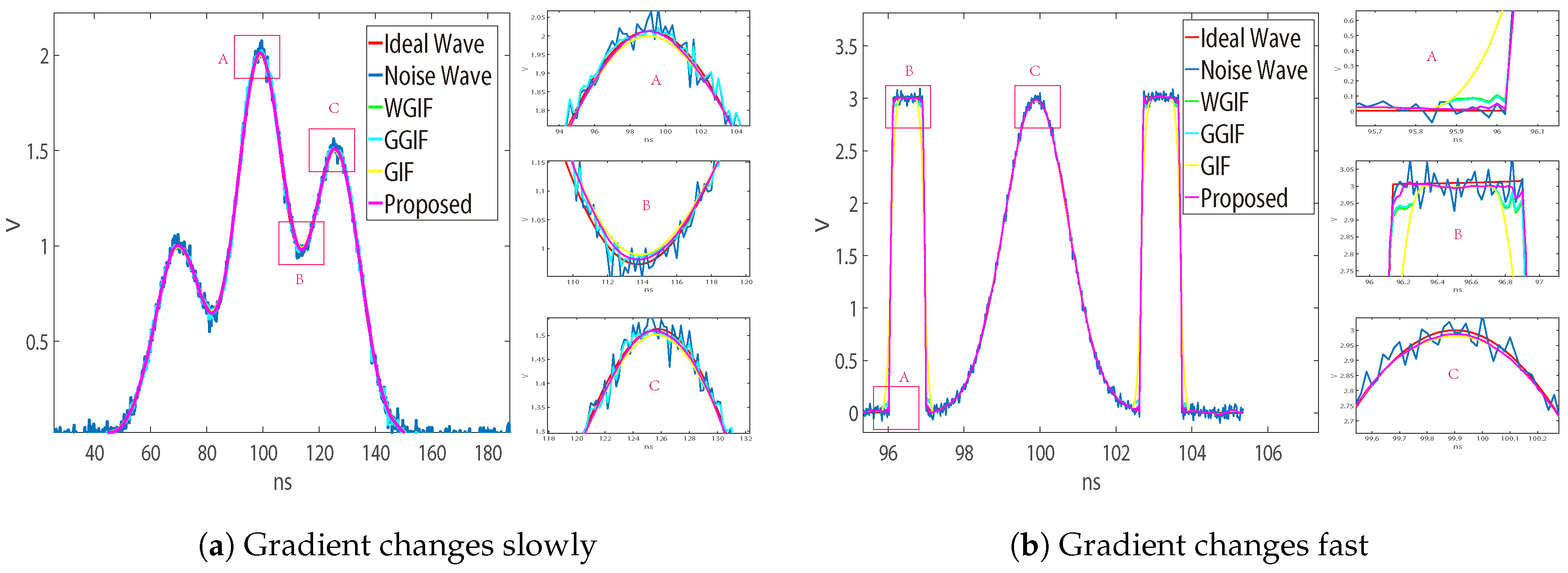
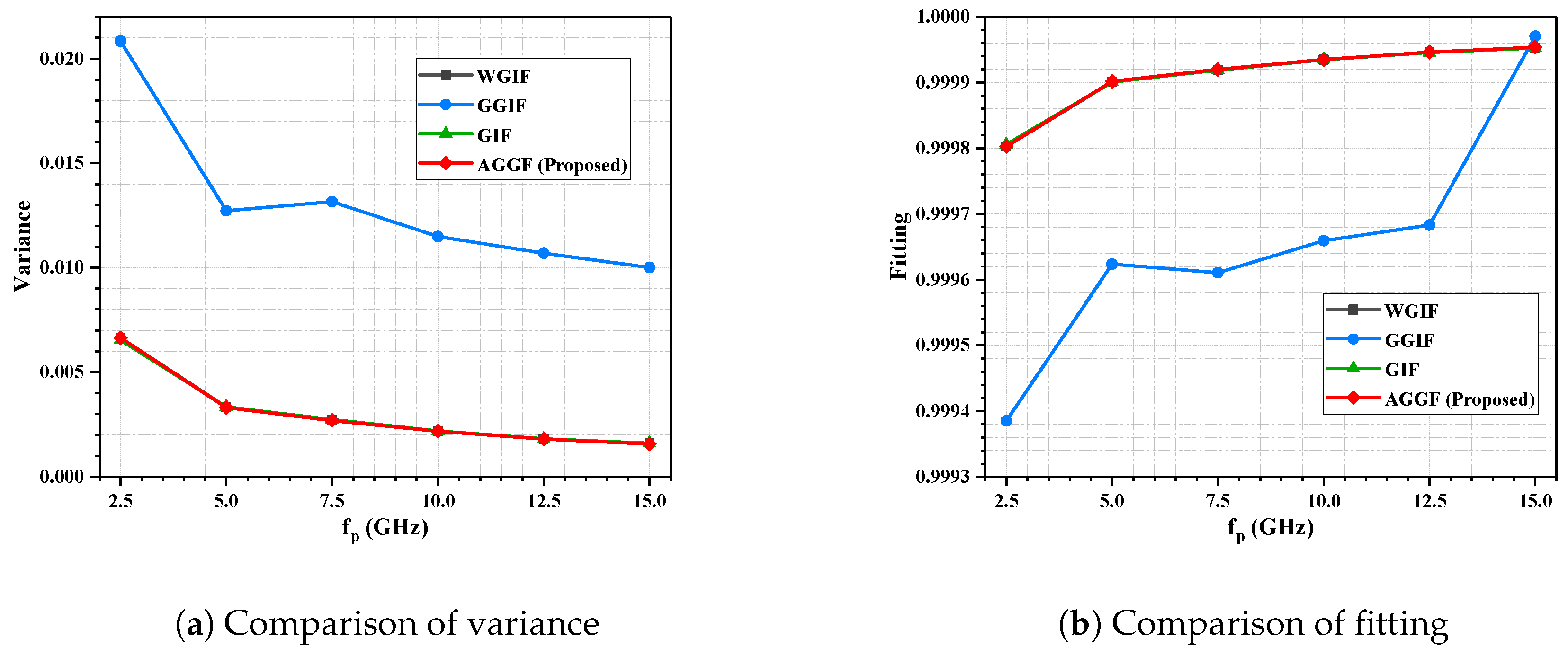
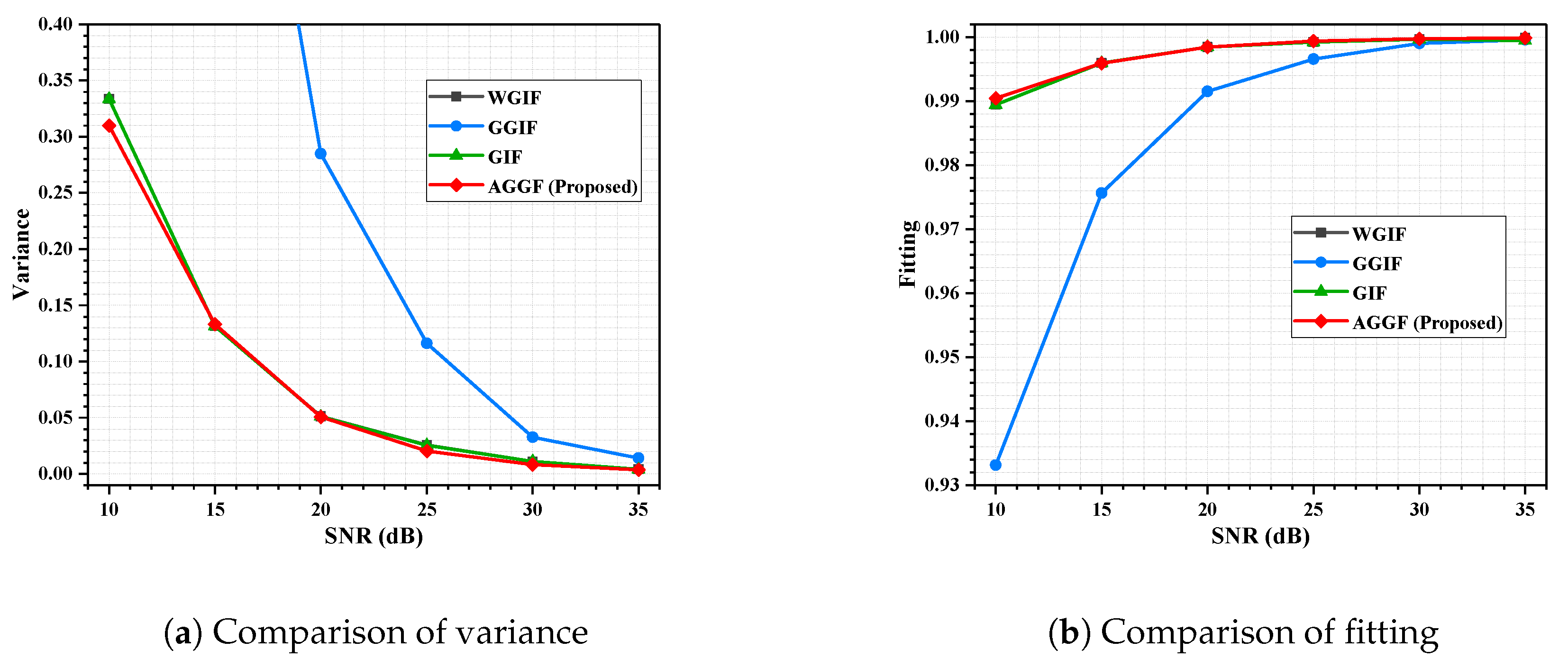
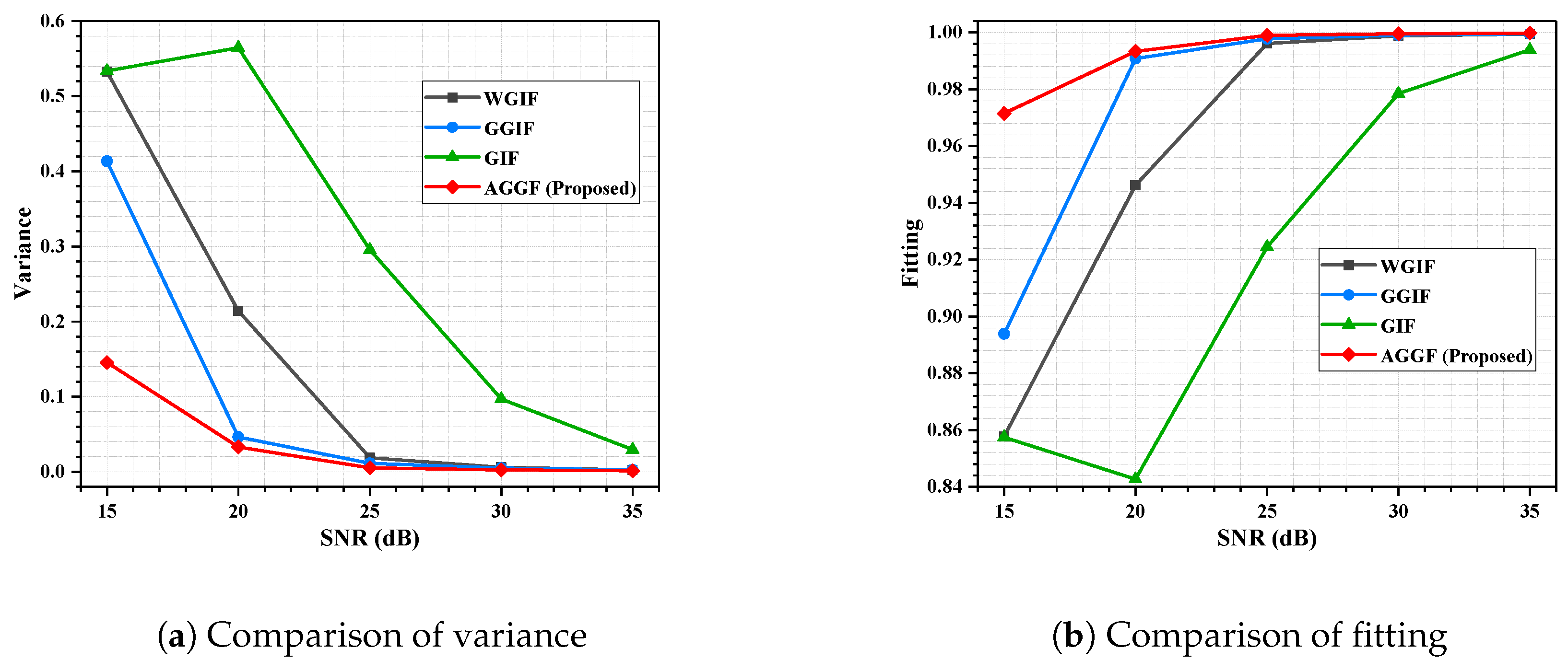
4.1. Evaluation
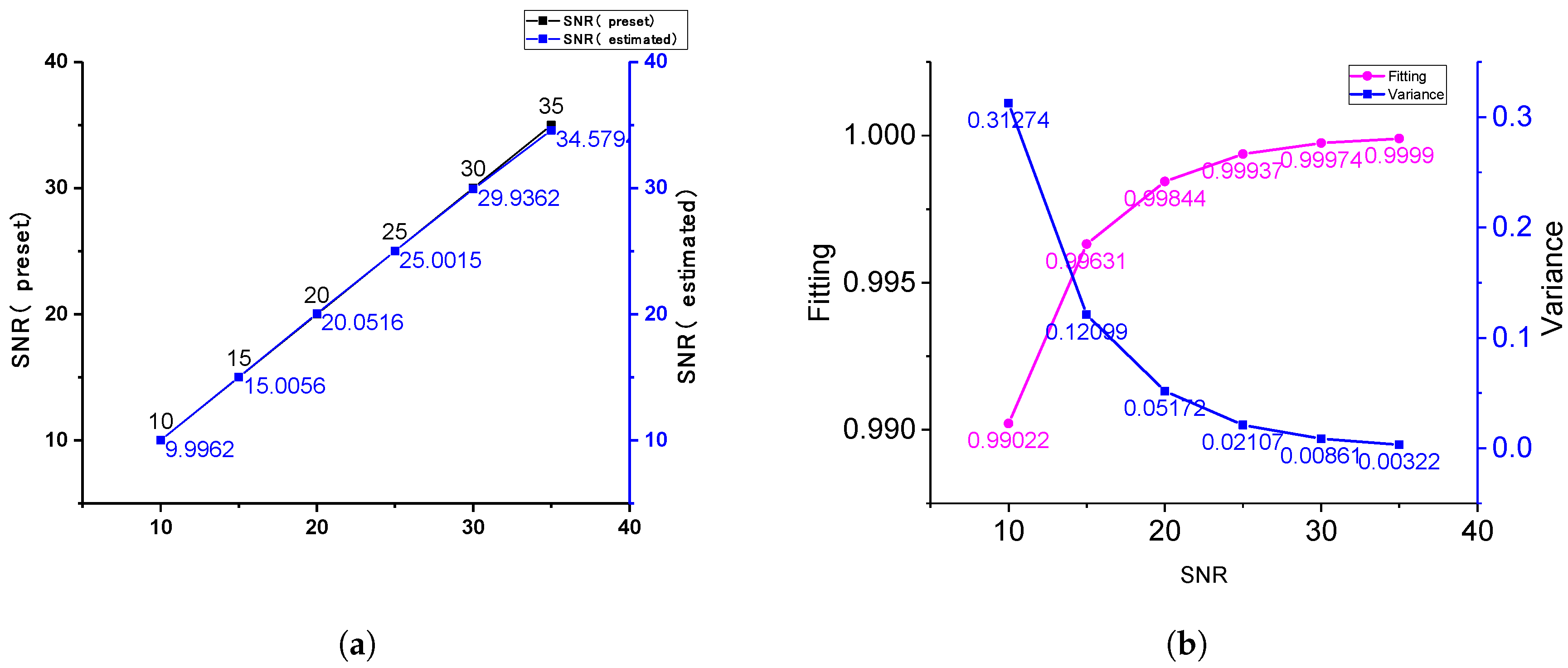
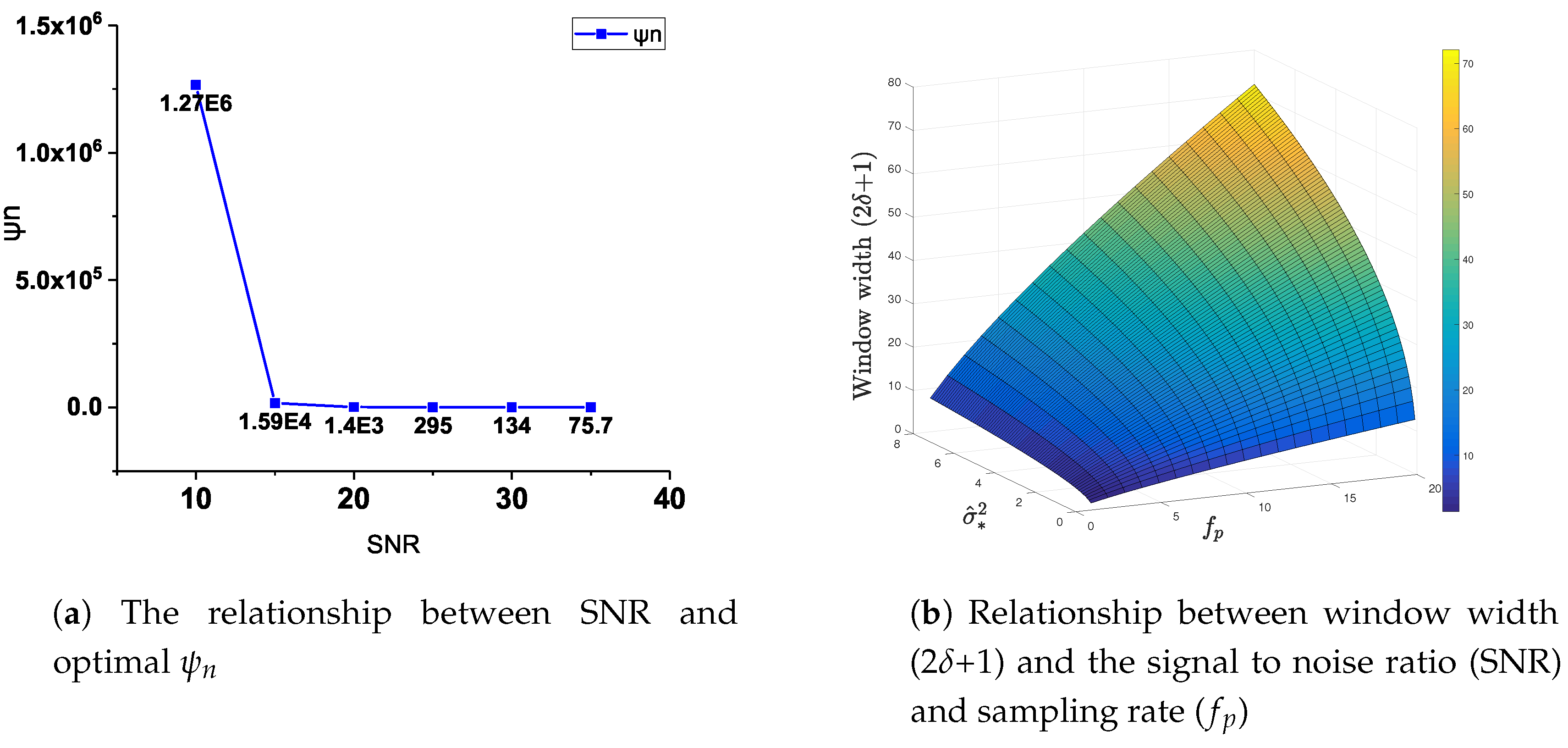
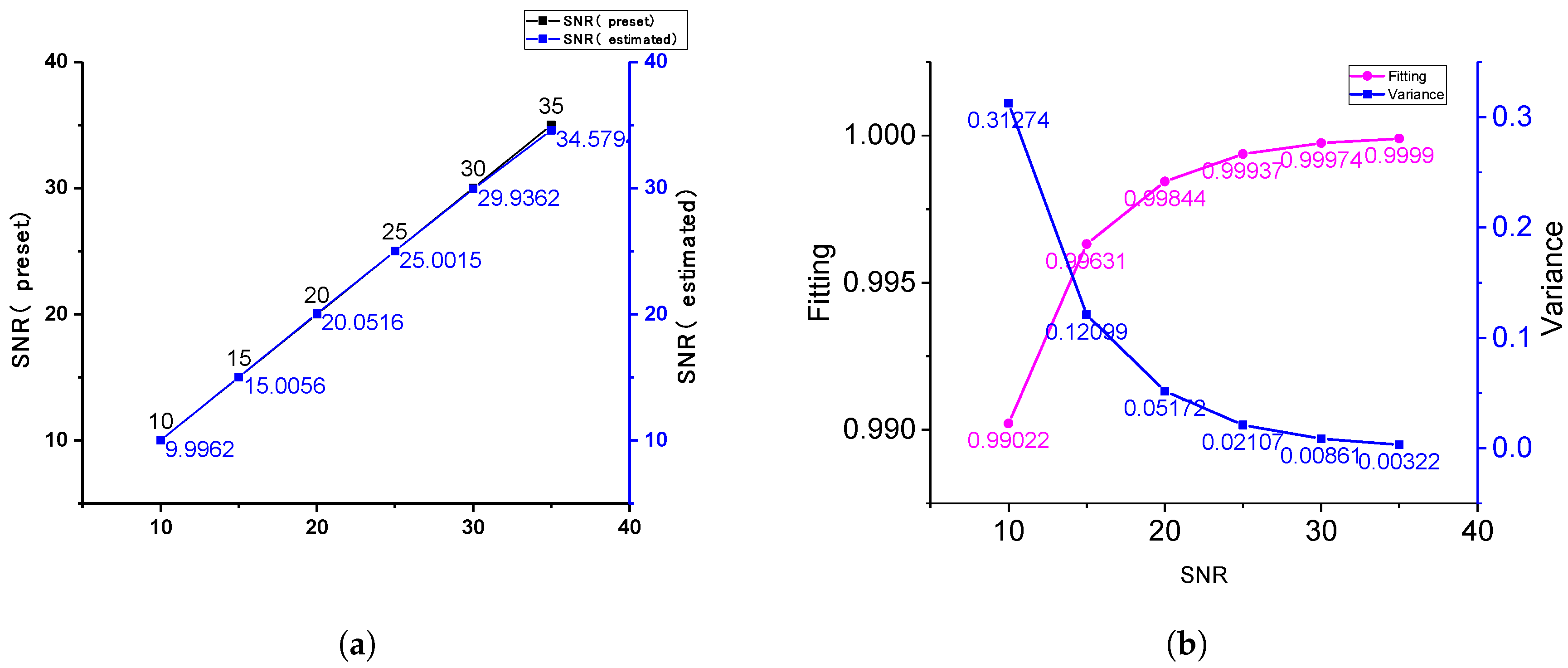
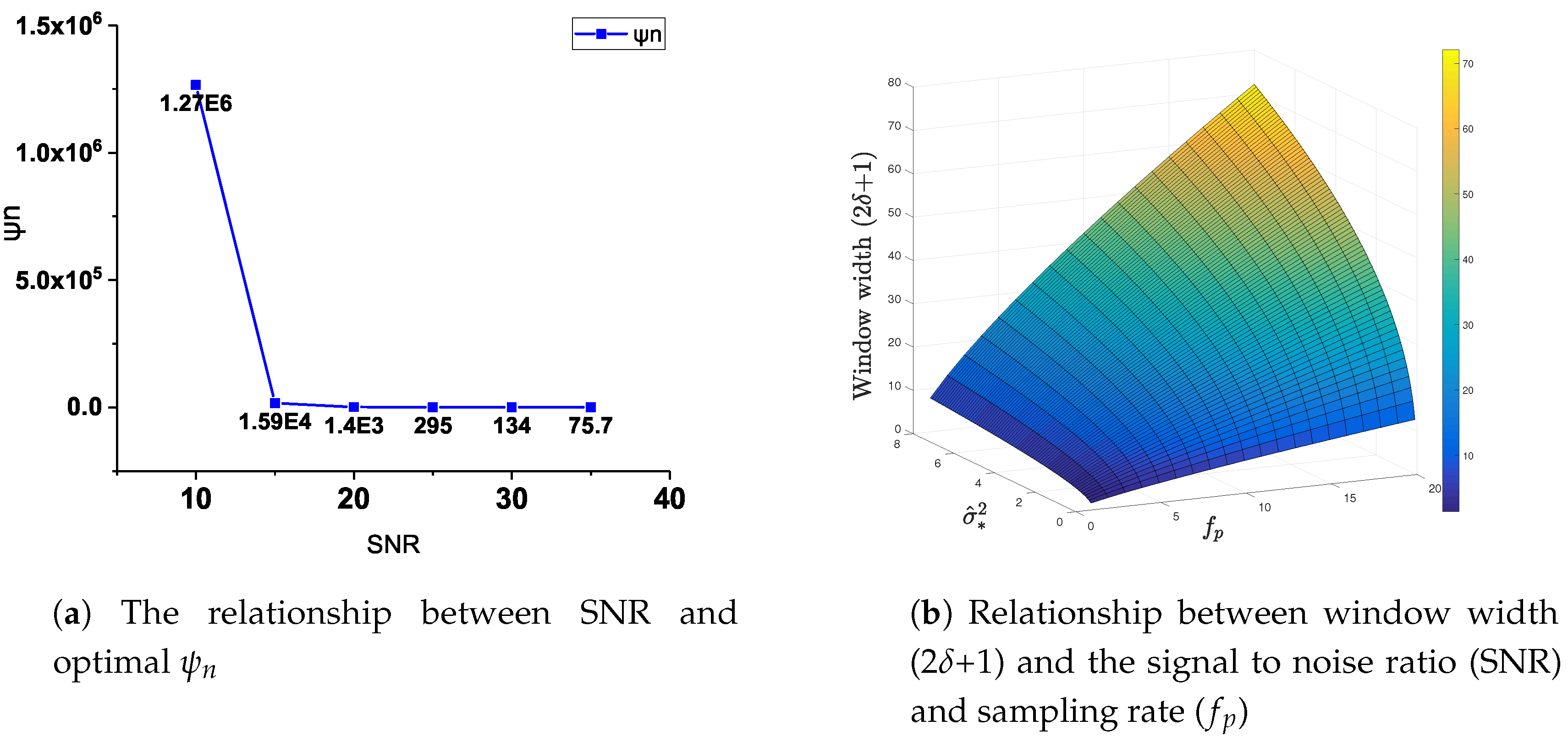
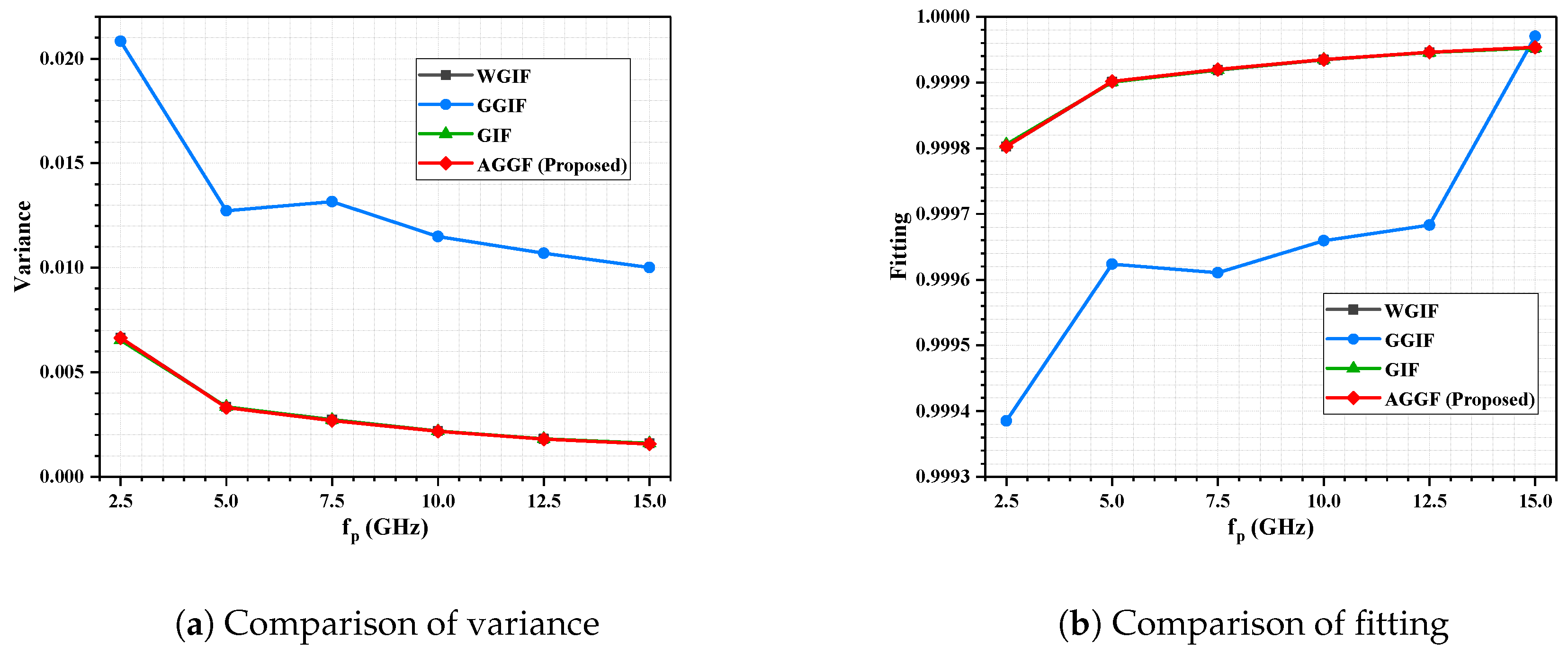
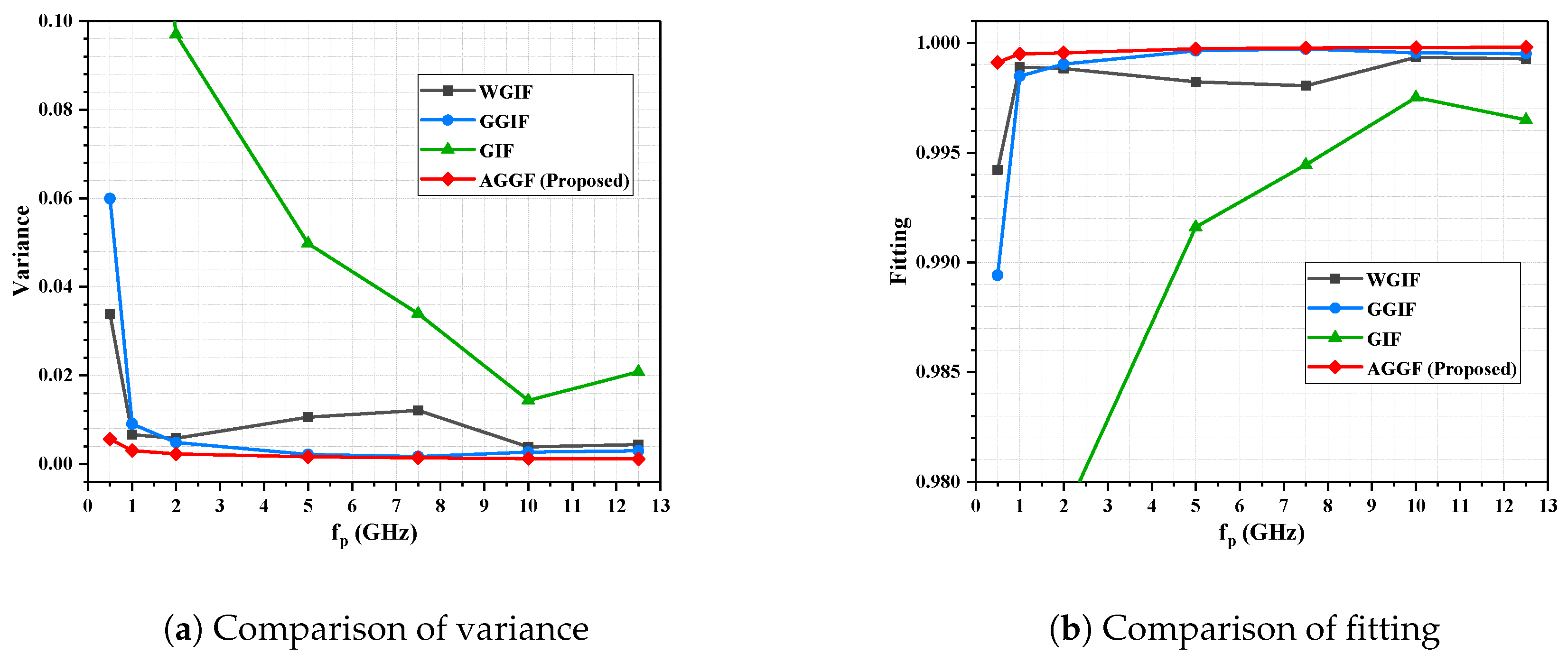
4.2. Analysis of the Relationship Between the Noise and Parameters
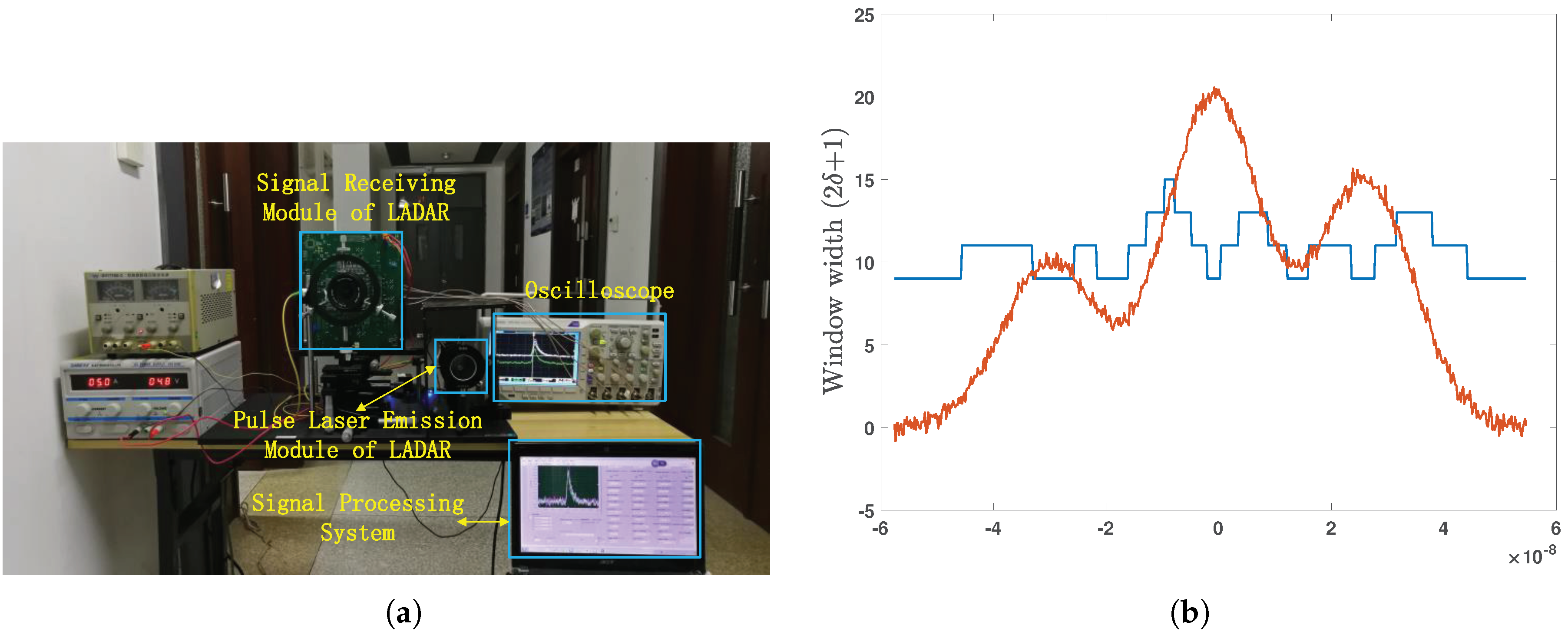
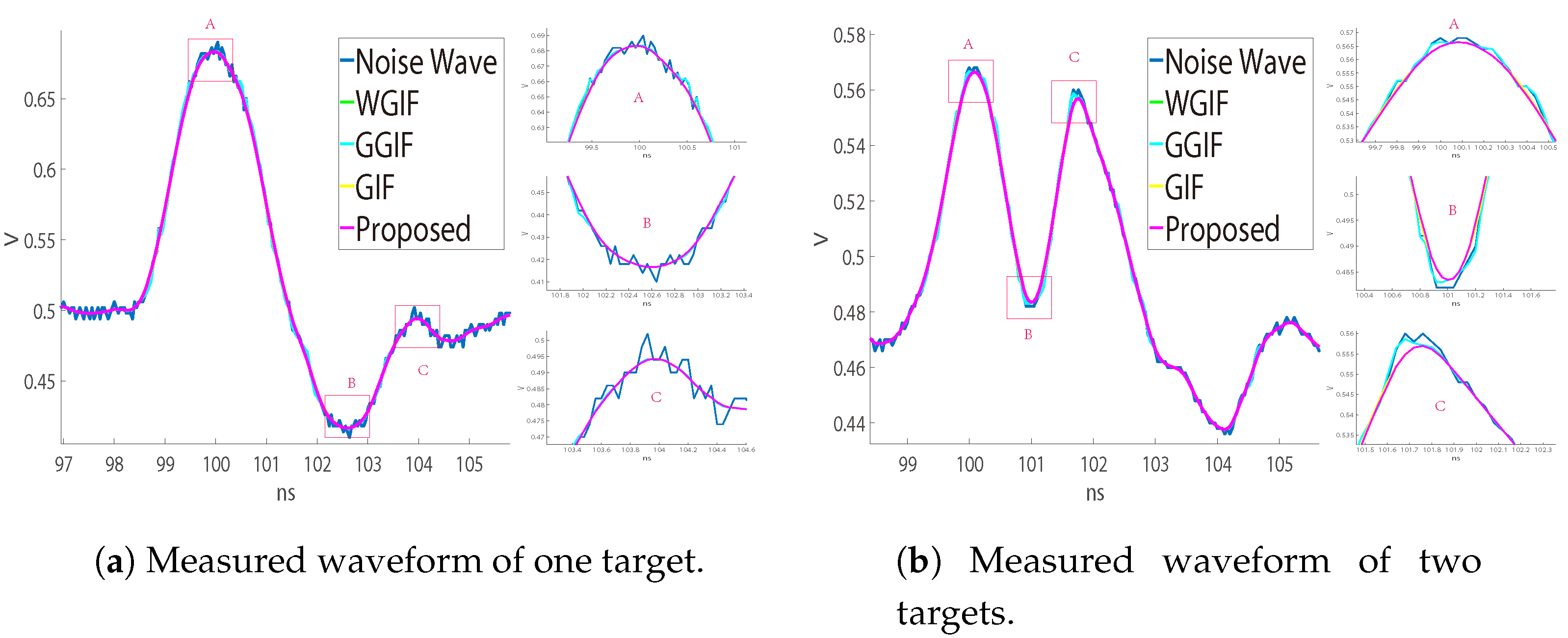
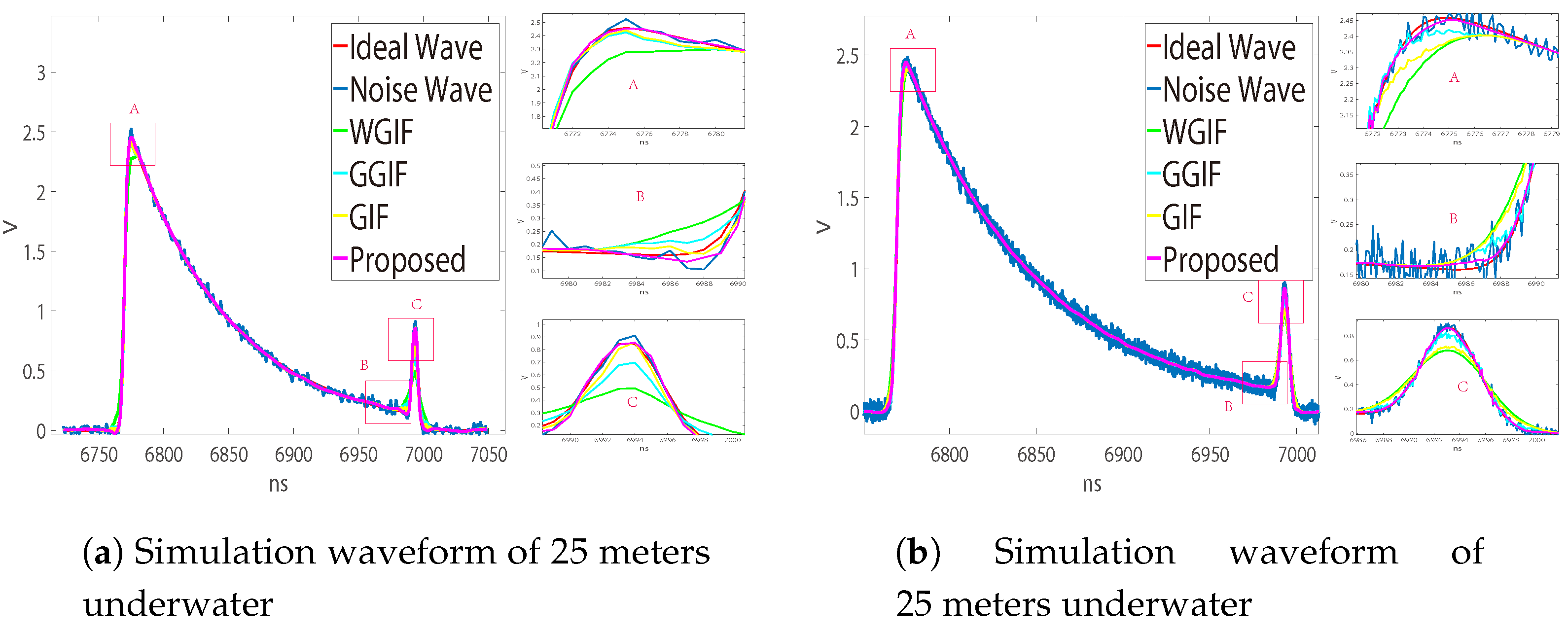
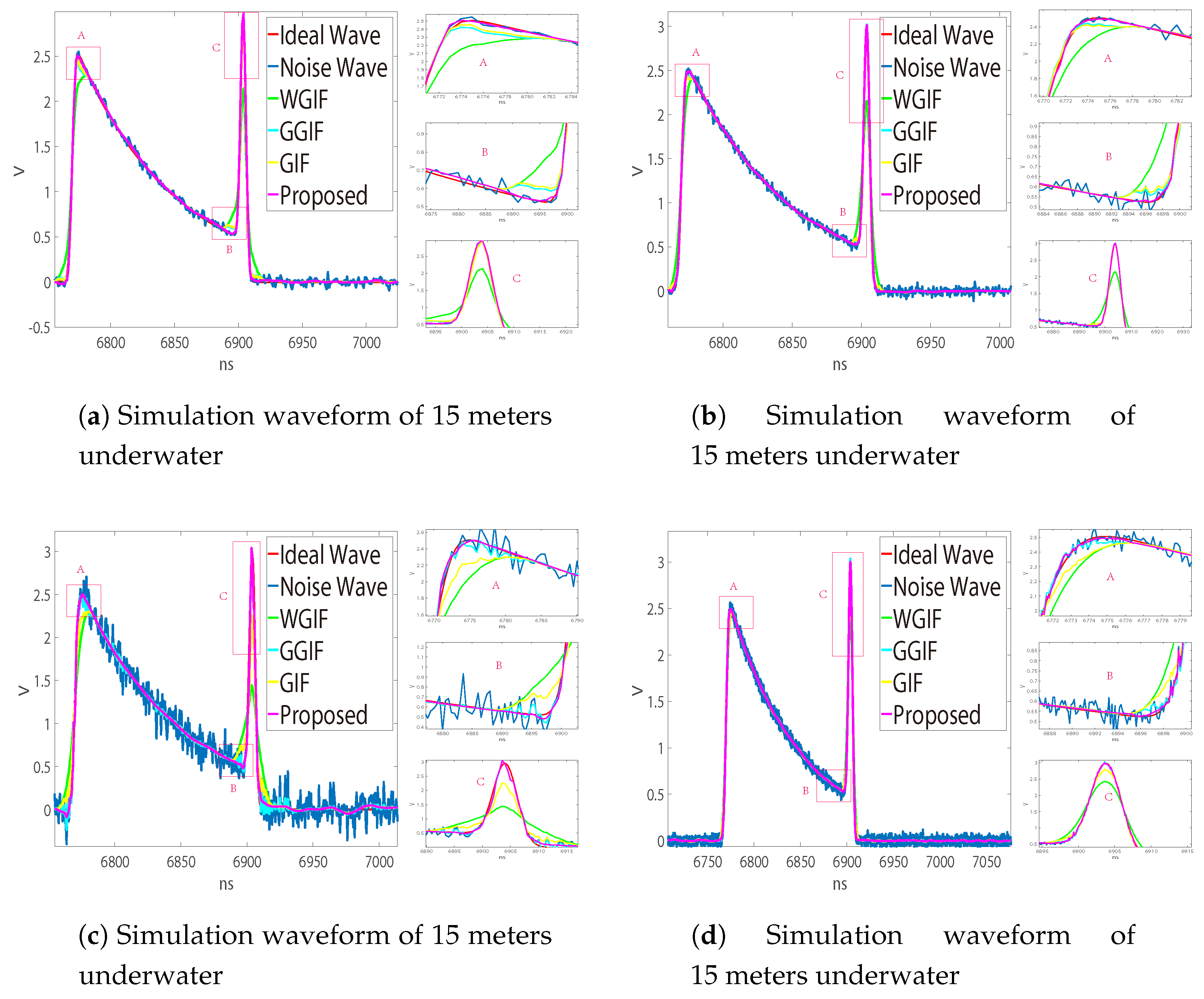
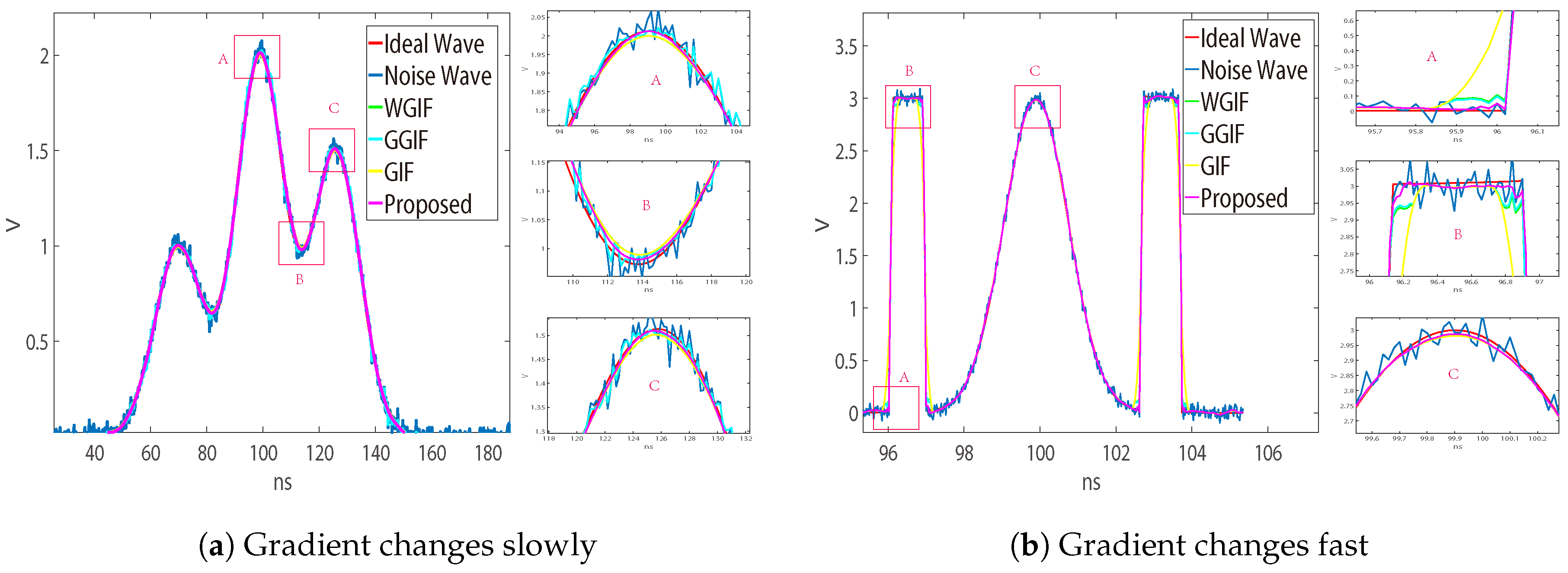
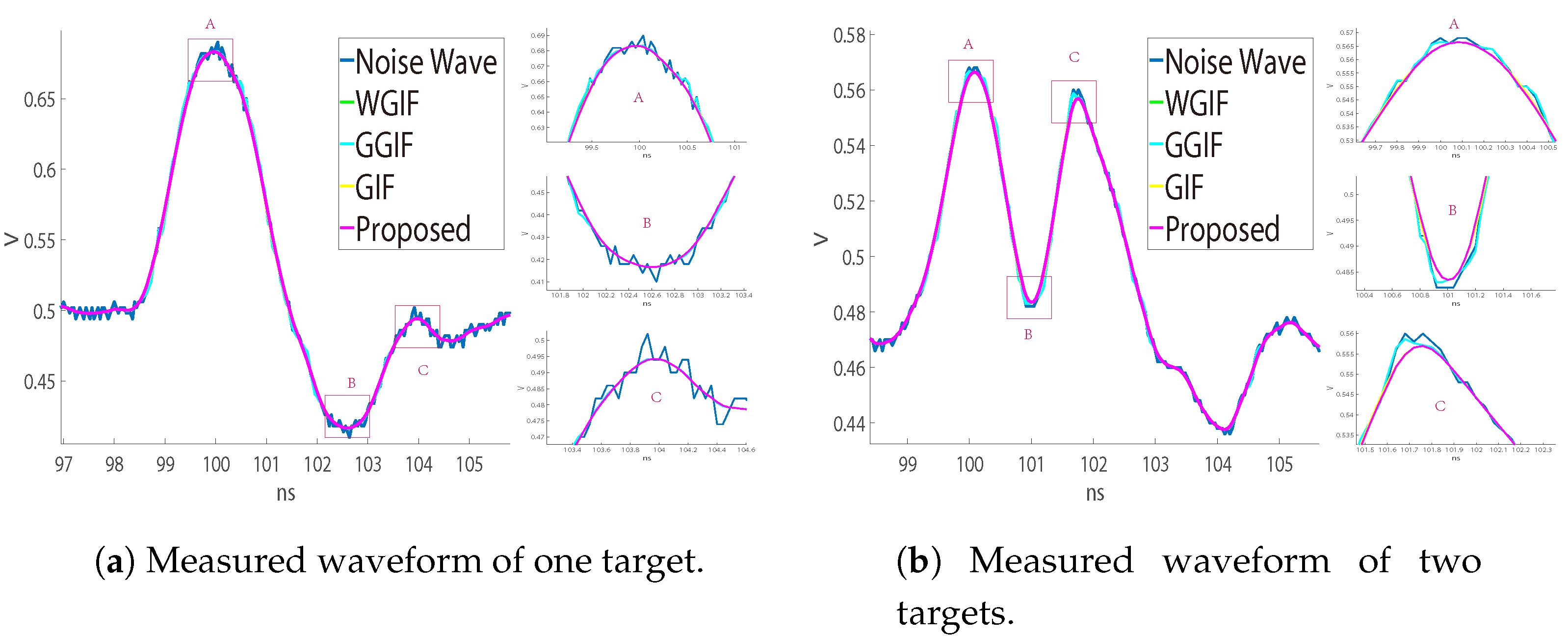
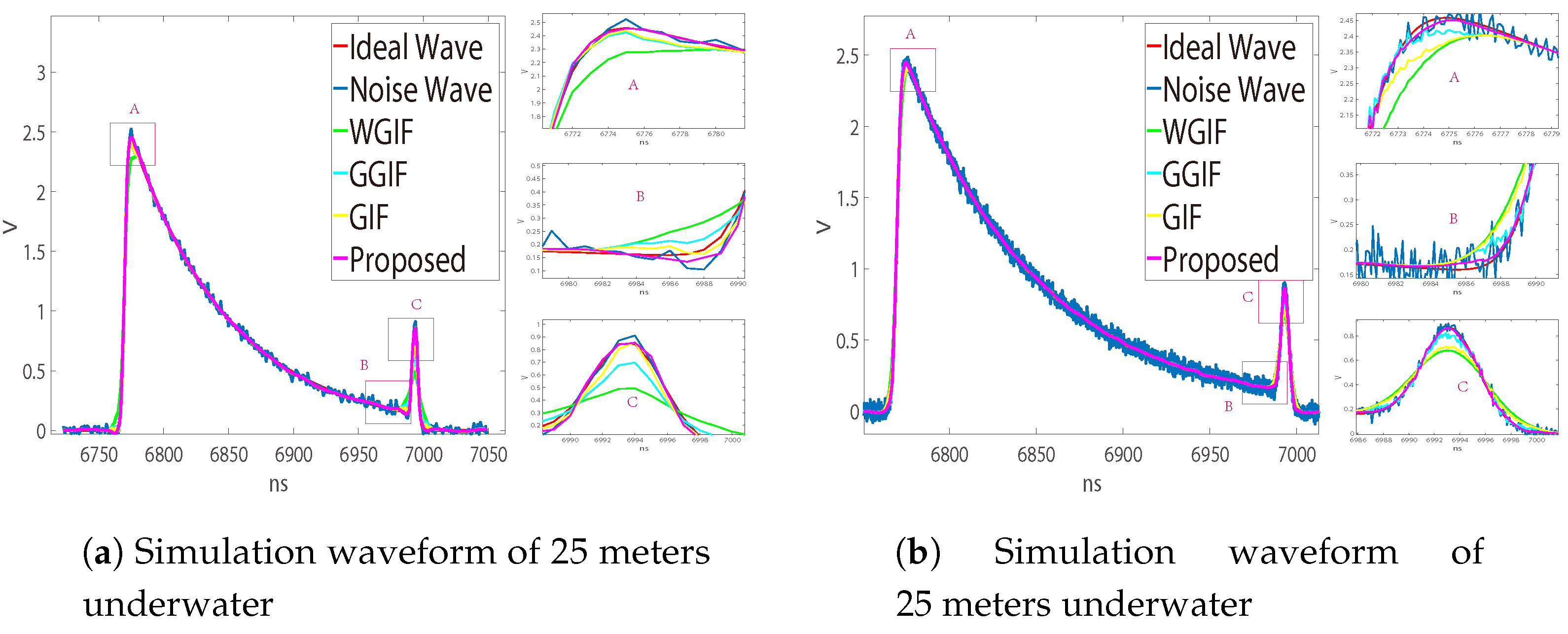
4.3. Analysis of Measurement and Simulation Data
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Benedek, C.; Galai, B.; Nagy, B.; Janko, Z. Lidar-based Gait Analysis and Activity Recognition in a 4D Surveillance System. IEEE Trans. Circuits Syst. Video Technol. 2016, 28, 101–113. [Google Scholar] [CrossRef]
- Behroozpour, B.; Sandborn, P.A.M.; Wu, M.C.; Boser, B.E. Lidar System Architectures and Circuits. IEEE Commun. Mag. 2017, 55, 135–142. [Google Scholar] [CrossRef]
- Parmehr, E.G.; Fraser, C.S.; Zhang, C. Automatic Parameter Selection for Intensity-Based Registration of Imagery to LiDAR Data. IEEE Trans. Geosci. Remote Sens. 2016, 54, 7032–7043. [Google Scholar] [CrossRef]
- Zheng, H.; Ma, R.; Liu, M.; Zhu, Z. High Sensitivity and Wide Dynamic Range Analog Front-End Circuits for Pulsed TOF 4-D Imaging LADAR Receiver. IEEE Sens. J. 2018, 18, 3114–3124. [Google Scholar] [CrossRef]
- Li, D.; Xu, L.; Li, X.; Ma, L. Full-waveform LiDAR signal filtering based on Empirical Mode Decomposition method. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium—IGARSS, Melbourne, Australia, 21–26 July 2013; pp. 3399–3402. [Google Scholar] [CrossRef]
- Yin, S.; Wang, W. Lidar signal denoising based on wavelet domain spatial filtering. In Proceedings of the 2006 CIE International Conference on Radar, Shanghai, China, 16–19 October 2006; pp. 1–3. [Google Scholar] [CrossRef]
- Arbel, N.; Hirschbrand, L.; Weiss, S.; Levanon, N.; Zadok, A. Continuously Operating Laser Range Finder Based on Incoherent Pulse Compression: Noise Analysis and Experiment. IEEE Photonics J. 2016, 8, 1–11. [Google Scholar] [CrossRef]
- Muss, J.D.; Aguilar-Amuchastegui, N.; Mladenoff, D.J.; Henebry, G.M. Analysis of Waveform Lidar Data Using Shape-Based Metrics. IEEE Geosci. Remote Sens. Lett. 2013, 10, 106–110. [Google Scholar] [CrossRef]
- Kwon, H.M. Optical orthogonal code-division multiple-access system .I. APD noise and thermal noise. IEEE Trans. Commun. 1994, 42, 2470–2479. [Google Scholar] [CrossRef]
- Li, K.F.; Ong, D.S.; David, J.P.R.; Tozer, R.C.; Rees, G.J.; Plimmer, S.A.; Chang, K.Y.; Roberts, J.S. Avalanche noise characteristics of thin GaAs structures with distributed carrier generation [APDs]. IEEE Trans. Electron. Devices 2000, 47, 910–914. [Google Scholar] [CrossRef]
- Xie, J.; Xie, S.; Tozer, R.C.; Tan, C.H. Excess Noise Characteristics of Thin AlAsSb APDs. IEEE Trans. Electron. Devices 2012, 59, 1475–1479. [Google Scholar] [CrossRef]
- Tan, L.J.J.; Ng, J.S.; Tan, C.H.; David, J.P.R. Avalanche Noise Characteristics in Submicron InP Diodes. IEEE J. Quantum Electron. 2008, 44, 378–382. [Google Scholar] [CrossRef]
- Abdallah, H.; Baghdadi, N.; Bailly, J.; Pastol, Y.; Fabre, F. Wa-LiD: A New LiDAR Simulator for Waters. IEEE Geosci. Remote Sens. Lett. 2012, 9, 744–748. [Google Scholar] [CrossRef]
- Wu, Y.; Hu, X.; Hu, D.; Wu, M. Comments on “Gaussian particle filtering”. IEEE Trans. Signal Process. 2005, 53, 3350–3351. [Google Scholar] [CrossRef]
- Tomasi, C.; Manduchi, R. Bilateral filtering for gray and color images. In Proceedings of the Sixth International Conference on Computer Vision (IEEE Cat. No.98CH36271), Bombay, India, 4–7 January 1998; pp. 839–846. [Google Scholar] [CrossRef]
- Petschnigg, G.; Szeliski, R.; Agrawala, M.; Cohen, M.; Hoppe, H.; Toyama, K. Digital Photography with Flash and No-Flash Image Pairs. ACM Trans. Graph. 2004, 23, 664–672. [Google Scholar] [CrossRef]
- He, K.; Sun, J.; Tang, X. Guided Image Filtering. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 1397–1409. [Google Scholar] [CrossRef] [PubMed]
- Zheng, Y.; Dai, Q.; Tu, Z.; Wang, L. Guided Image Filtering-Based Pan-Sharpening Method: A Case Study of GaoFen-2 Imagery. ISPRS Int. J. Geo-Inf. 2017, 6, 404. [Google Scholar] [CrossRef]
- Kim, Y.D.; Son, G.J.; Song, C.H.; Kim, H.K. On the Deployment and Noise Filtering of Vehicular Radar Application for Detection Enhancement in Roads and Tunnels. Sensors 2018, 18, 837. [Google Scholar] [CrossRef]
- Chen, R.; Yang, C. Noise Level Estimation for Overcomplete Dictionary Learning Based on Tight Asymptotic Bounds. In Pattern Recognition and Computer Vision; Lai, J.H., Liu, C.L., Chen, X., Zhou, J., Tan, T., Zheng, N., Zha, H., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 257–267. [Google Scholar]
- Kou, F.; Chen, W.; Wen, C.; Li, Z. Gradient Domain Guided Image Filtering. IEEE Trans. Image Process. 2015, 24, 4528–4539. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Zheng, J.; Zhu, Z.; Yao, W.; Wu, S. Weighted Guided Image Filtering. IEEE Trans. Image Process. 2015, 24, 120–129. [Google Scholar] [CrossRef]
- Eliason, E.M.; Mcewen, A.S. Adaptive box filters for removal of random noise from digital images. Photogramm. Eng. Remote Sens. 1990, 56, 453–458. [Google Scholar]
- Restrepo, A.; Bovik, A.C. Adaptive trimmed mean filters for image restoration. IEEE Trans. Acoust. Speech Signal Process. 1988, 36, 1326–1337. [Google Scholar] [CrossRef]
- Huang, T.; Yang, G.; Tang, G. A fast two-dimensional median filtering algorithm. IEEE Trans. Acoust. Speech Signal Process. 1979, 27, 13–18. [Google Scholar] [CrossRef]
- Zhang, B.; Allebach, J.P. Adaptive Bilateral Filter for Sharpness Enhancement and Noise Removal. In Proceedings of the 2007 IEEE International Conference on Image Processing, San Antonio, TX, USA, 16–19 September 2007; Volume 4, pp. IV-417–IV-420. [Google Scholar]
- Ming, Z.; Gunturk, B.K. Multiresolution bilateral filtering for image denoising. IEEE Trans. Image Process. 2008, 17, 2324–2333. [Google Scholar] [CrossRef] [PubMed]
- Balasubramanian, G.; Chelvan, A.C.; Vijayan, S.; Gowrison, G. Adaptive averaging of multiresolution bilateral and median filtering for image denoising. In Proceedings of the 2012 International Conference on Emerging Trends in Science, Engineering and Technology (INCOSET), Tiruchirappalli, India, 13–14 December 2012; pp. 154–158. [Google Scholar] [CrossRef]
- Takeda, H.; Farsiu, S.; Milanfar, P. Kernel Regression for Image Processing and Reconstruction. IEEE Trans. Image Process. 2007, 16, 349–366. [Google Scholar] [CrossRef] [PubMed]
- Smith, S.M.; Brady, J.M. A New Approach to Low Level Image Processing. Int. J. Comput. Vis. 1997, 23, 45–78. [Google Scholar] [CrossRef]
- Yu, G.; Sapiro, G. DCT Image Denoising A Simple and Effective Image Denoising Algorithm. Image Process. Line 2011, 1, 292–296. [Google Scholar] [CrossRef]
- Donoho, D.L. De-noising by soft-thresholding. IEEE Trans. Inf. Theory 1995, 41, 613–627. [Google Scholar] [CrossRef]
- Donoho, D.L.; Johnstone, I.M. Ideal Spatial Adaptation by Wavelet Shrinkage. Biometrika 1994, 81, 425–455. [Google Scholar] [CrossRef]
- Mafi, M.; Tabarestani, S.; Cabrerizo, M.; Barreto, A.; Adjouadi, M. Denoising of ultrasound images affected by combined speckle and Gaussian noise. IET Image Process. 2018, 12, 2346–2351. [Google Scholar] [CrossRef]
- Stockwell, R.G.; Mansinha, L.; Lowe, R.P. Localization of the complex spectrum: the S transform. IEEE Trans. Signal Process. 1996, 44, 998–1001. [Google Scholar] [CrossRef]
- Xu, Y.; Weaver, J.B.; Healy, D.M. Wavelet transform domain filters: A spatially selective noise filtration technique. IEEE Trans. Image Process. 1994, 3, 747–758. [Google Scholar] [CrossRef]
- Mallat, S.; Hwang, W.L. Singularity detection and processing with wavelets. IEEE Trans. Inf. Theory 1992, 38, 617–643. [Google Scholar] [CrossRef]
- Javier, P.; Vasily, S.; Wainwright, M.J.; Simoncelli, E.P. Image denoising using scale mixtures of Gaussians in the wavelet domain. IEEE Trans. Image Process. 2003, 12, 1338. [Google Scholar]
- Fattal, R.; Lischinski, D.; Werman, M. Gradient Domain High Dynamic Range Compression. In Proceedings of the Conference on Computer Graphics & Interactive Techniques, San Antonio, TX, USA, 21–26 July 2002. [Google Scholar]
- Perez, P. Poisson image editing. ACM Trans. Graph 2003, 22, 313–318. [Google Scholar] [CrossRef]
- Johnstone, I.M. On the Distribution of the Largest Eigenvalue in Principal Components Analysis. Ann. Stat. 2001, 29, 295–327. [Google Scholar] [CrossRef]
- Chiani, M. On the probability that all eigenvalues of Gaussian and Wishart random matrices lie within an interval. IEEE Trans. Inf. Theory 2017, 63, 4521–4531. [Google Scholar] [CrossRef]
- El Karoui, N. A Rate of Convergence Result for the Largest Eigenvalue of Complex White Wishart Matrices. Ann. Probab. 2006, 34, 2077–2117. [Google Scholar] [CrossRef]
- Zongming, M.A. Accuracy of the Tracy–Widom limits for the extreme eigenvalues in white Wishart matrices. Mathematics 2008, 18, 322–359. [Google Scholar]
- Bai, Z.; Silverstein, J.W. Spectral Analysis of Large Dimensional Random Matrices. J. R. Stat. Soc. 2012, 175, 822–823. [Google Scholar]
- Wu, S.; Liu, Z.; Liu, B. Enhancement of lidar backscatters signal-to-noise ratio using empirical mode decomposition method. Opt. Commun. 2006, 267, 137–144. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SNR | WGIG | GGIF | GIF | AGGF (Proposed) | |||||
|---|---|---|---|---|---|---|---|---|---|
| Fitting | Variance | Fitting | Variance | Fitting | Variance | Fitting | Variance | ||
| 10 | 5000 | 0.9896289 | 0.3320057 | 0.9294678 | 2.4700421 | 0.9899139 | 0.3224299 | 0.9899558 | 0.3200555 |
| 150,000 | 0.9900612 | 0.3242041 | 0.9335110 | 2.3769678 | 0.9900623 | 0.3241507 | 0.9904550 | 0.3120494 | |
| 1.27 × 106 | 0.9899291 | 0.3223799 | 0.9323638 | 2.3626738 | 0.9899292 | 0.3223750 | 0.9901822 | 0.3134338 | |
| 15 | 1500 | 0.9959852 | 0.1317777 | 0.9752516 | 0.8424215 | 0.9961218 | 0.1271757 | 0.9962622 | 0.1220978 |
| 5000 | 0.9964259 | 0.1172305 | 0.9761854 | 0.8110346 | 0.9964482 | 0.1164678 | 0.9965838 | 0.1120026 | |
| 15,000 | 0.9962935 | 0.1218438 | 0.9757185 | 0.8274727 | 0.9962985 | 0.1216689 | 0.9963667 | 0.1190786 | |
| 20 | 100 | 0.9979770 | 0.0674745 | 0.9907810 | 0.3124294 | 0.9983977 | 0.0532925 | 0.9984316 | 0.0520335 |
| 1500 | 0.9985062 | 0.0498123 | 0.9913531 | 0.2929273 | 0.9985161 | 0.0494753 | 0.9985083 | 0.0496394 | |
| 5000 | 0.9984113 | 0.0526354 | 0.9913088 | 0.2925424 | 0.9984137 | 0.0525548 | 0.9984236 | 0.0520893 | |
| 25 | 10 | 0.9986424 | 0.0455014 | 0.9966124 | 0.1142694 | 0.9993092 | 0.0230704 | 0.9993714 | 0.0209918 |
| 100 | 0.9993676 | 0.0212017 | 0.9969995 | 0.1014306 | 0.9994068 | 0.0198746 | 0.9994056 | 0.0199305 | |
| 1500 | 0.9993093 | 0.0230395 | 0.9969920 | 0.1014459 | 0.9993100 | 0.0230151 | 0.9993253 | 0.0225601 | |
| 30 | 10 | 0.9996188 | 0.0127846 | 0.9989465 | 0.0355396 | 0.9997132 | 0.0095981 | 0.9997371 | 0.0088228 |
| 100 | 0.9997270 | 0.0091296 | 0.9989876 | 0.0341289 | 0.9997288 | 0.0090679 | 0.9997469 | 0.0084929 | |
| 1500 | 0.9997136 | 0.0095818 | 0.9990168 | 0.0331666 | 0.9997134 | 0.0095874 | 0.9997366 | 0.0088431 | |
| 35 | 10 | 0.9998705 | 0.0043549 | 0.9996337 | 0.0123681 | 0.9998903 | 0.0036829 | 0.9999041 | 0.0032282 |
| 100 | 0.9998890 | 0.0037272 | 0.9996338 | 0.0123681 | 0.9998890 | 0.0037263 | 0.9999034 | 0.0032540 | |
| 1500 | 0.9998865 | 0.0038077 | 0.9996364 | 0.0122755 | 0.9998865 | 0.0038097 | 0.9999019 | 0.0033016 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, X.; Chen, R.; Wang, P.; Zhao, Y. Robust Noise Suppression Technique for a LADAR System via Eigenvalue-Based Adaptive Filtering. Sensors 2019, 19, 2311. https://doi.org/10.3390/s19102311
Xia X, Chen R, Wang P, Zhao Y. Robust Noise Suppression Technique for a LADAR System via Eigenvalue-Based Adaptive Filtering. Sensors. 2019; 19(10):2311. https://doi.org/10.3390/s19102311
Chicago/Turabian StyleXia, Xianzhao, Rui Chen, Pinquan Wang, and Yiqiang Zhao. 2019. "Robust Noise Suppression Technique for a LADAR System via Eigenvalue-Based Adaptive Filtering" Sensors 19, no. 10: 2311. https://doi.org/10.3390/s19102311
APA StyleXia, X., Chen, R., Wang, P., & Zhao, Y. (2019). Robust Noise Suppression Technique for a LADAR System via Eigenvalue-Based Adaptive Filtering. Sensors, 19(10), 2311. https://doi.org/10.3390/s19102311