1. Introduction
ZY-3 is the first civilian high-resolution stereo mapping satellite in China [
1], and provides a tangible improvement in the monitoring capabilities for many fields, such as agriculture, forestry, geology, and so on. It has been designed for 1:50,000 scale stereo mapping requirements, which is of great significance to strengthen China’s ability to independently obtain more geospatial information. The revisit period of the ZY-3 satellite is 5 days, and so abundant high-resolution satellite (HRS) stereo image pairs can be collected over a short period. These stereo image pairs are acquired from a three-line camera (TLC) sensor on the satellite platform. The ground sampling distance (GSD) of the forward-, backward-, and nadir-directed cameras are 3.5 m, 3.5 m, and 2.1 m, respectively.
Before making use of these remote sensing images for mapping and monitoring, their geometric characteristics must be considered [
2], in which the block adjustment can improve the geometric consistency and accuracy [
3]. There are three types of adjustment approaches used in current research, namely bundle adjustment [
4], direct georeferencing (rigorous sensor model) [
5], and the rational function model (RFM) [
6]. All three methods were compared in [
7], and the results showed that the geometric performances were almost identical. However, considering the simplicity of implementation and standardization [
8], the RFM method is widely used in the field of remote sensing image processing. During the procedure of geometric positioning accuracy improvement, a large number of well-distributed ground control points (GCPs) are usually required [
9]. Due to limitations of manpower and finance, it is always difficult to acquire enough GCPs to meet the accuracy requirement [
10], especially in some areas which are difficult for humans to reach, such as deserts and mountains. Many research works have proved that block adjustment with few GCPs can also achieve a high geometric positioning accuracy [
11], while considering the processing mission of block adjustment for large-scale regions it may be not as good as the results in small areas. Therefore, some effective methods of block adjustment are proposed to achieve the accuracy requirement without using GCPs [
6]. Nowadays, such methods can be divided into two classes: using some other known information such as the digital elevation model (DEM) [
12], or taking advantage of the stereo image pairs [
13]. The first case depends on the precision of the auxiliary data, while the other has a requirement of additional image data sets. In 2010, a DEM-aided block adjustment method was presented by Teo et al. [
7] which is significant for improving the geometric consistency between overlapping images, and this method has been improved in [
14] for nadir viewing images that constrains the elevations of tie points to improve the relative accuracy. These tie points can serve to build links between neighboring images. The relative accuracy means the relative errors between tie points which represent the same object on neighboring images. High relative accuracy of these tie points can guarantee the accuracy of image stitching. Recently, a Shuttle Radar Topography Mision(SRTM) DEM-aided block adjustment procedure was developed in [
15] which was highly dependent on the DEM resolution.
Considering the characteristics of ZY-3 satellite stereo images pairs, Wang et al. [
13] reported that the same accuracy can be obtained for block adjustment supported with DEM and using ZY-3 satellite stereo image pairs. Tang et al. [
16] proved that the nadir image from the ZY-3 satellite can achieve a high positioning accuracy without GCPs, while using a 0.5 m vertical accuracy DEM for reference. After that, Zheng and Zhang [
17] conducted experiments on multi-source of ZY-3 and GF-1 using DEM-assisted bundle block adjustment for ortho-map production. The global positioning system (GPS) is used in [
18] for multi-strip long-orbit bundle block adjustment by a rigorous sensor model. The results obtained above are not always satisfactory because of the limitations of the quality of the ancillary data (e.g., DEMs). Considering that ZY-3 satellite remote sensing images can satisfy the requirements of 1:50,000 scale topographic mapping, Cao [
19] undertook block adjustment of multi-temporal images of ZY-3, and the residual errors were reduced because of the redundant observation. In this way, multi-temporal images are helpful in the process of block adjustment. Moreover, multi-temporal images have been applied in many fields of image processing. For example, Gao et al. [
20] presented a registration algorithm of multi-temporal images based on image geometric structural and gray information. Shaunak proposed a novel deep learning based weakly-supervised framework for urban change detection using multi-temporal polarimetric synthetic aperture radar (SAR) data in [
21]. Pablo [
22] introduced an automatic image orientation method with multi-temporal images, which is helpful for the use of multi-temporal images in the procedure of block adjustment.
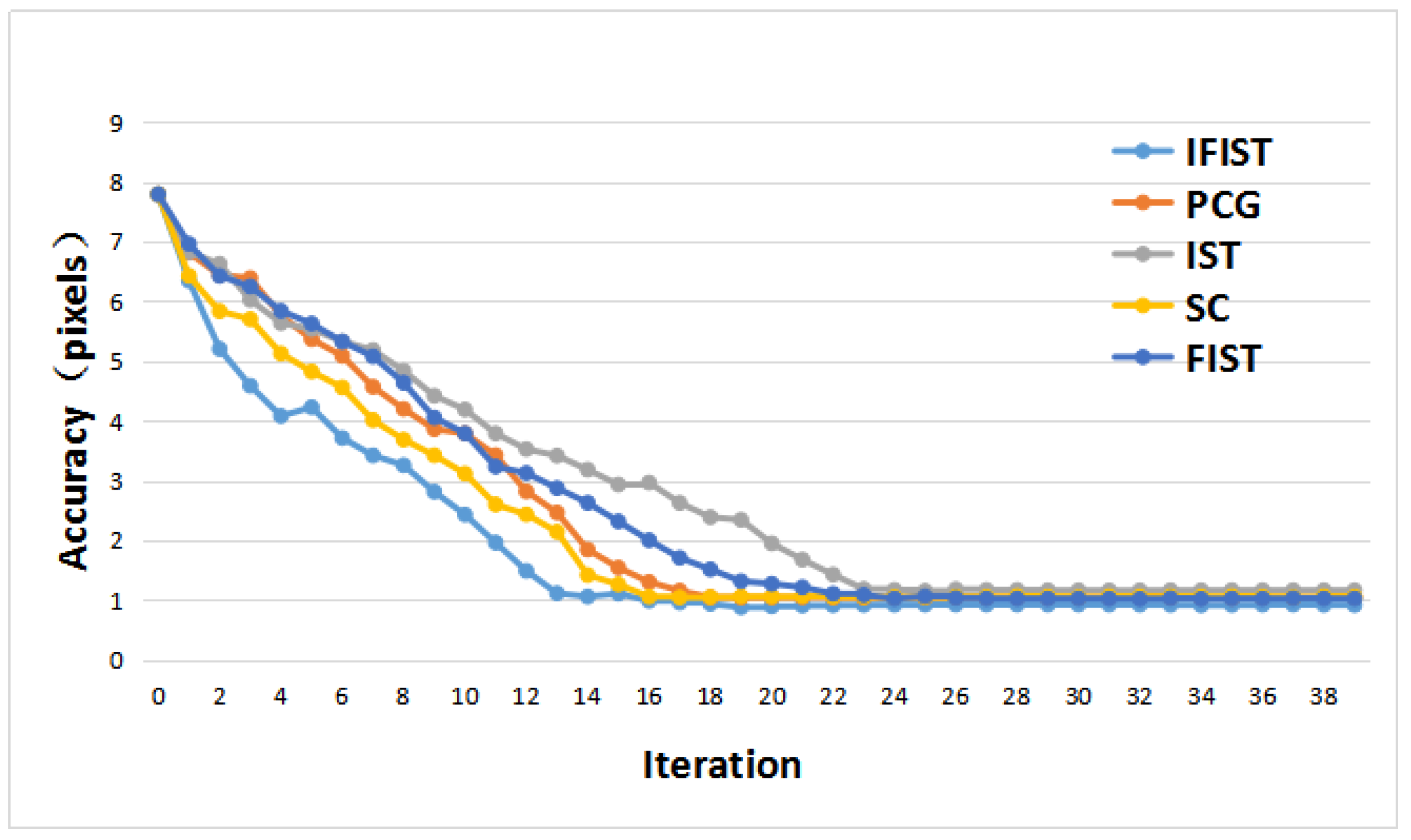
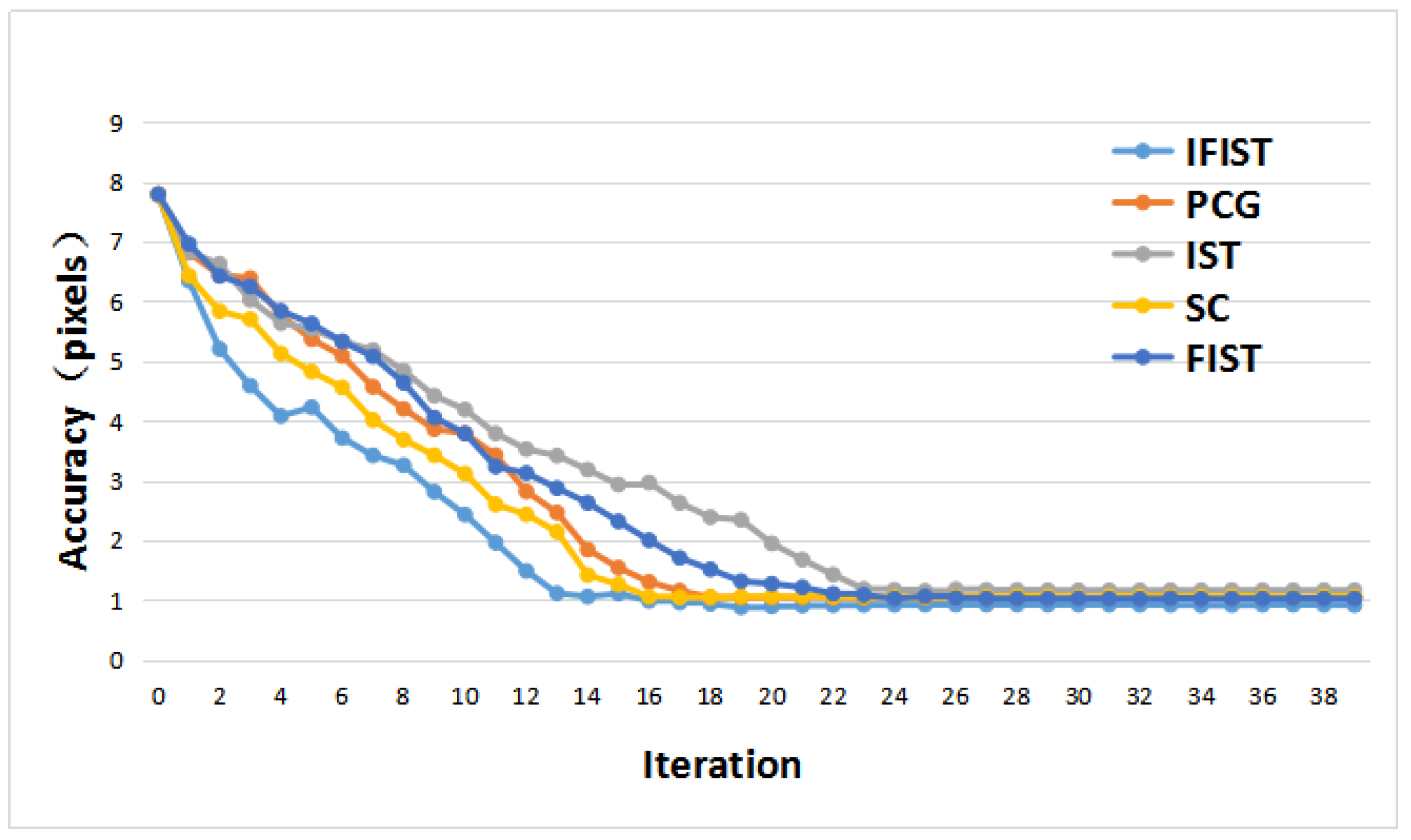
However, methods to solve the rank-deficient normal equations have seldom been detailed in previous studies. Traditional methods such as the preconditioned conjugate gradient (PCG) algorithm [
19] and the spectrum correction (SC) method [
23] are time-consuming and complicated. In this way, an advanced fast iterative shrinkage-thresholding (FIST) algorithm [
24] which is widely used in the field of compressive sensing is improved and detailed here to solve the singularity of the normal equation matrix. The FIST algorithm has proven to be an optimal method at the first order in algorithm complexity for solving the problem of minimizing smooth convex functions [
25]. Compared with the traditional FIST algorithm, the improved FIST algorithm can make a better convergence with good efficiency [
26].
Moreover, the rational function model is an approximation of the rigorous sensor model after the sensor calibration and on-orbit geometry calibration [
27]. The geometric positioning errors calculated with the help of rational polynomial coefficients (RPCs) contain the systematic errors of the satellite orientation (position, altitude, camera, jitter errors, and so on) and image point errors (systematic or random errors). The image point errors are mainly random errors in the acquisition of their coordinates. Compared with systematic errors, image point errors can be reduced to a small value with an accurate acquisition method. In fact, the traditional free block adjustment method without using GCPs can reduce random errors in geometric positioning to a large extent [
28]. Usually, the residual errors are distributed in a specific direction and within a certain range due to the inherent errors of sensors on the satellite platform. Based on this, the inherent error compensation model is proposed to remedy the inherent errors of the satellite platform. The inherent errors of the satellite platform are also known as systematic errors. The density-based spatial clustering of applications with noise (DBSCAN) [
29] algorithm is compatible with analysing the error distribution as a popular clustering method in the field of statistical learning. Compared with traditional clustering methods such as K-means [
30] and decision trees [
31], the DBSCAN method can automatically classify the dataset without a specified number of categories.
The remainder of this paper is organized as follows: The mathematical details of the control point free block adjustment with the improved FIST algorithm and the inherent error compensation model are presented in
Section 2. Some experiments are conducted to verify the proposed model and the results are analysed in
Section 3. Finally, the conclusions of our experiments are presented in
Section 4.
2. Methodology
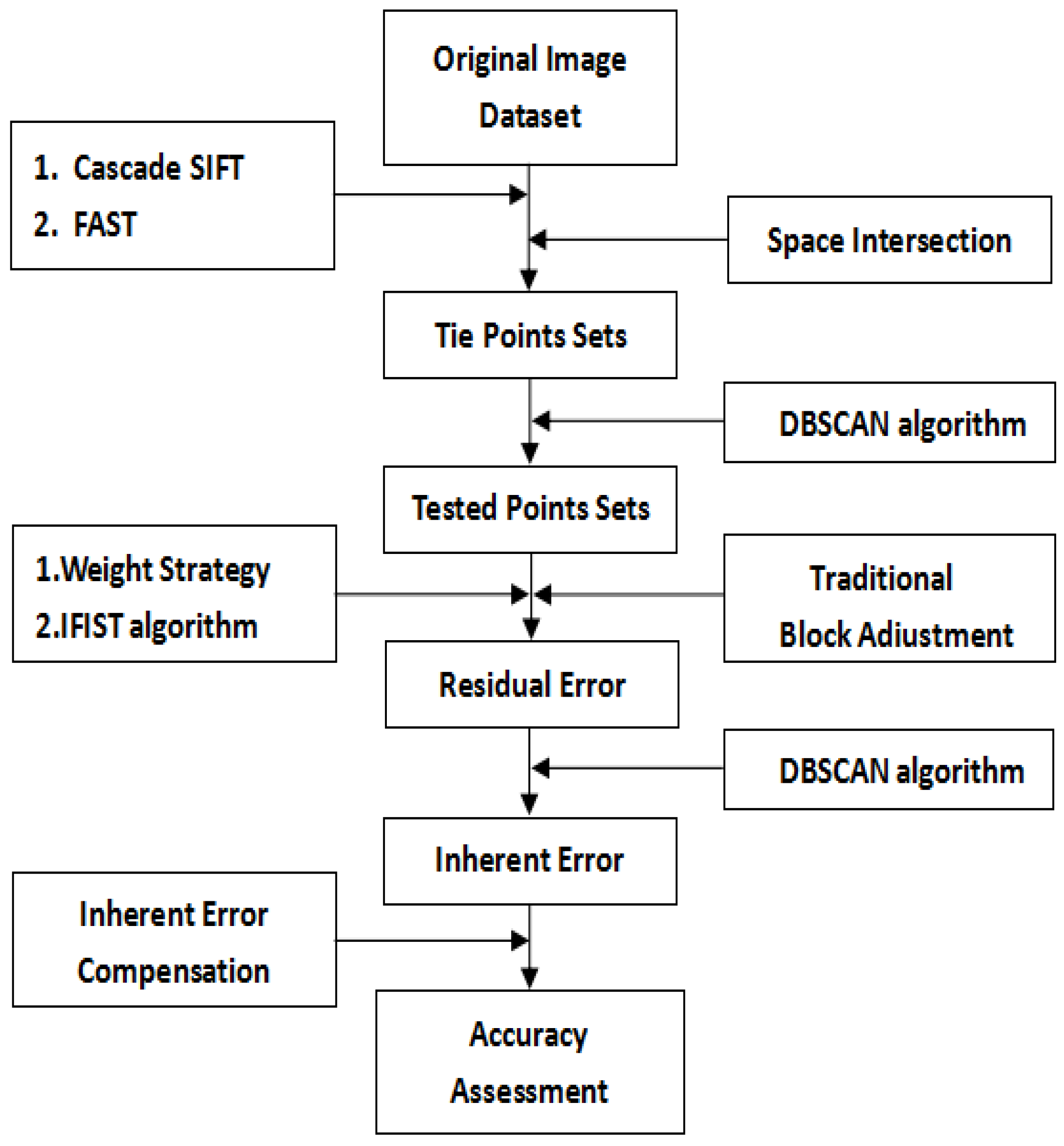
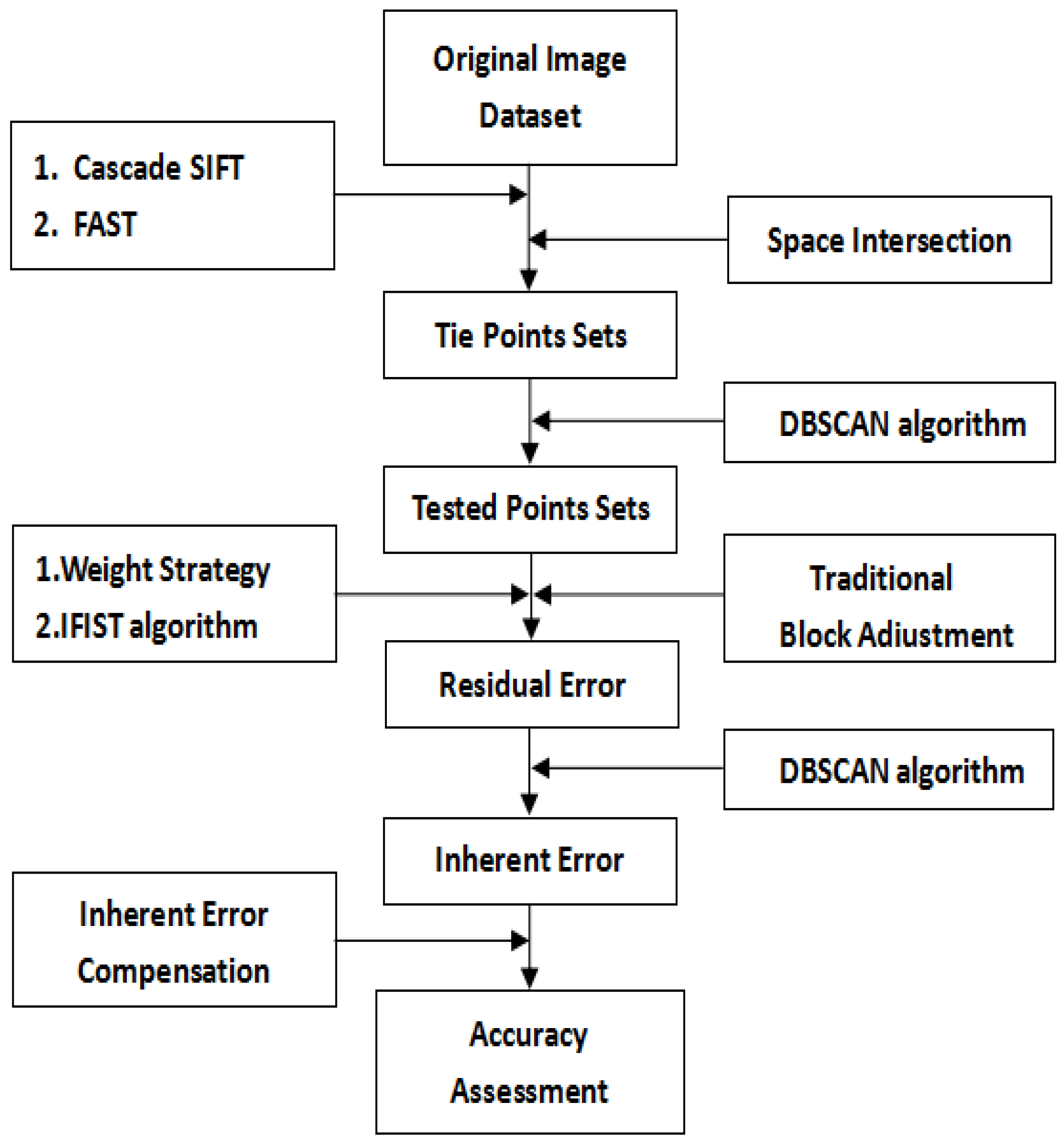
Figure 1 shows the main steps of our proposed method. Unlike some traditional methods, our proposed method includes two stages, which are summarised as follows and described in detail below: coarse correction and accurate correction, which are comprised of the following five steps. Firstly, the tie point sets are obtained after the image registration step with the help of the cascade scale-invariant feature transform(SIFT) algorithm and features from accelerated segment test (FAST) method and the space intersection step. With the extracted dataset clustered by the DBSCAN algorithm, traditional block adjustment with the improved FIST algorithm and the proposed weight strategy are applied to improve the geometric positioning accuracy. Then, the data clustering method is applied for a second time to analyze the distribution of residual errors in order to extract the inherent satellite platform errors of our experimental dataset. Finally, the inherent error compensation model is established with the help of the clustering method, aiming to reduce the inherent errors. The main steps of our experiments are introduced in detail in the following context.
2.1. Cascade SIFT Method and Space Intersection Method
Initially, the tie point sets can be obtained with the help of the cascade SIFT method and FAST method. The cascade SIFT method is derived from the traditional SIFT [
32] method. Since the SIFT operator is invariant with position, scale, and rotation, it is suitable to be applied for remote sensing image registration. It can be written as follows:
where
k is the scale operator;
is the original image space, and
is a Gaussian function with a standard deviation of
;
and
represent the Gaussian scale space and the difference of Gaussian (DoG), respectively.
The cascade SIFT method can be divided into two parts: the large coverage adapted anisotropic Gaussian-SIFT (AAG-SIFT) algorithm and the local-SIFT algorithm. The large coverage AAG-SIFT algorithm [
33] is applied to a whole remote sensing image to achieve the coarse registration. Firstly, the DoG is applied in image scale to detect most points which can represent the integral structure features of the image. Removing unstable points with low contrast in all extremal points, the final feature points in image scale are obtained. Next, the gradient of these feature points are calculated and the histogram of these gradients around detected feature points are counted. The main directions of these feature points are extracted based on the histogram. After this, the descriptors of these feature points are generated, and the random sample consensus (RANSAC) algorithm is applied to screen out the correct matching points. With all coarse correct matching points in the image space detected, the coarse registration is finished.
After the coarse registration step, a small window around the object-space coordinate is extracted with the help of the RPCs. A local SIFT matching method is utilized and accurate matching points are obtained with a local-scale DoG. With the local matching method, the matching points searching process is undertaken in the local region of the image with the interference of other unrelated regions removed. The coarse correct matching points of the same local area and the accurate matching points are combined together to ensure the accurate registration.
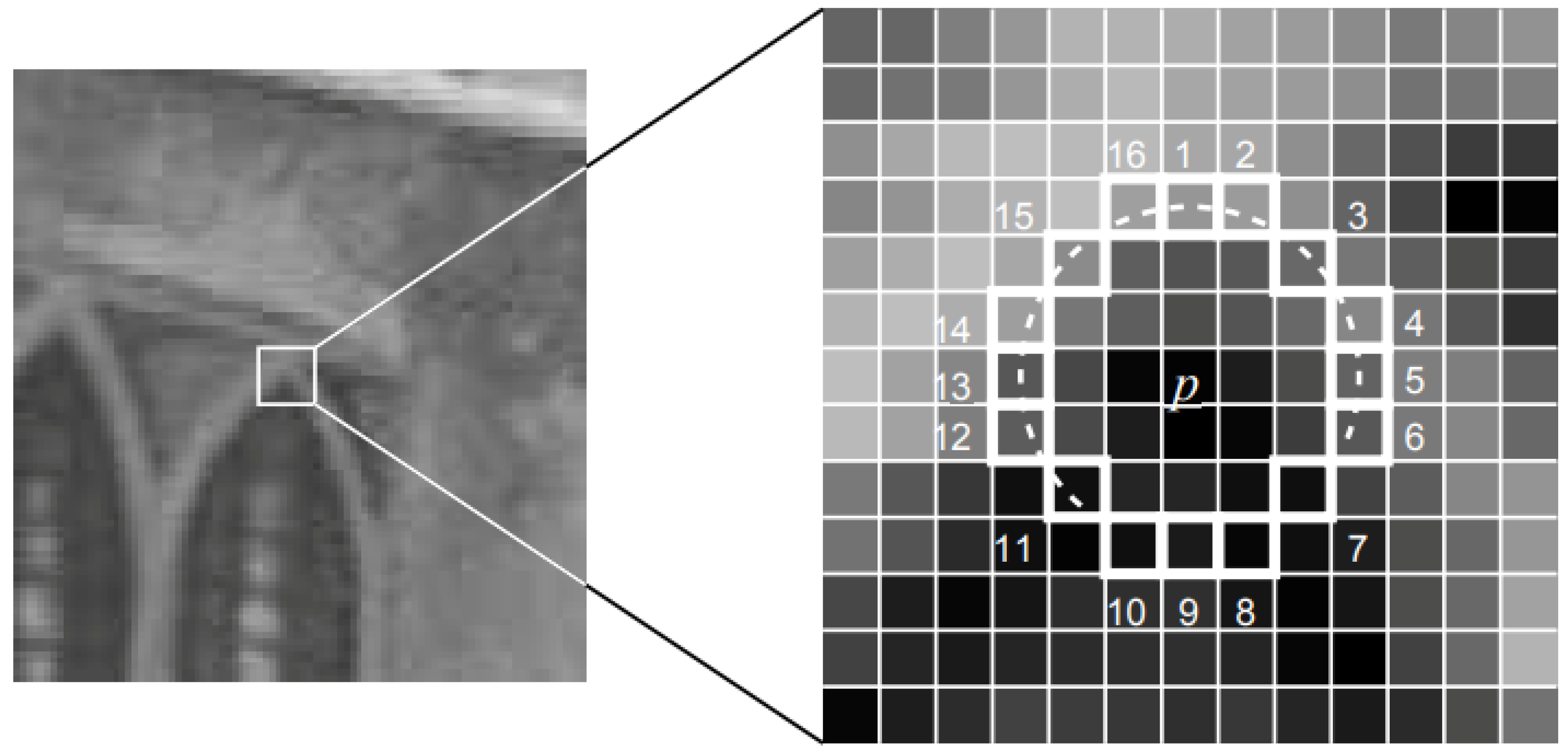
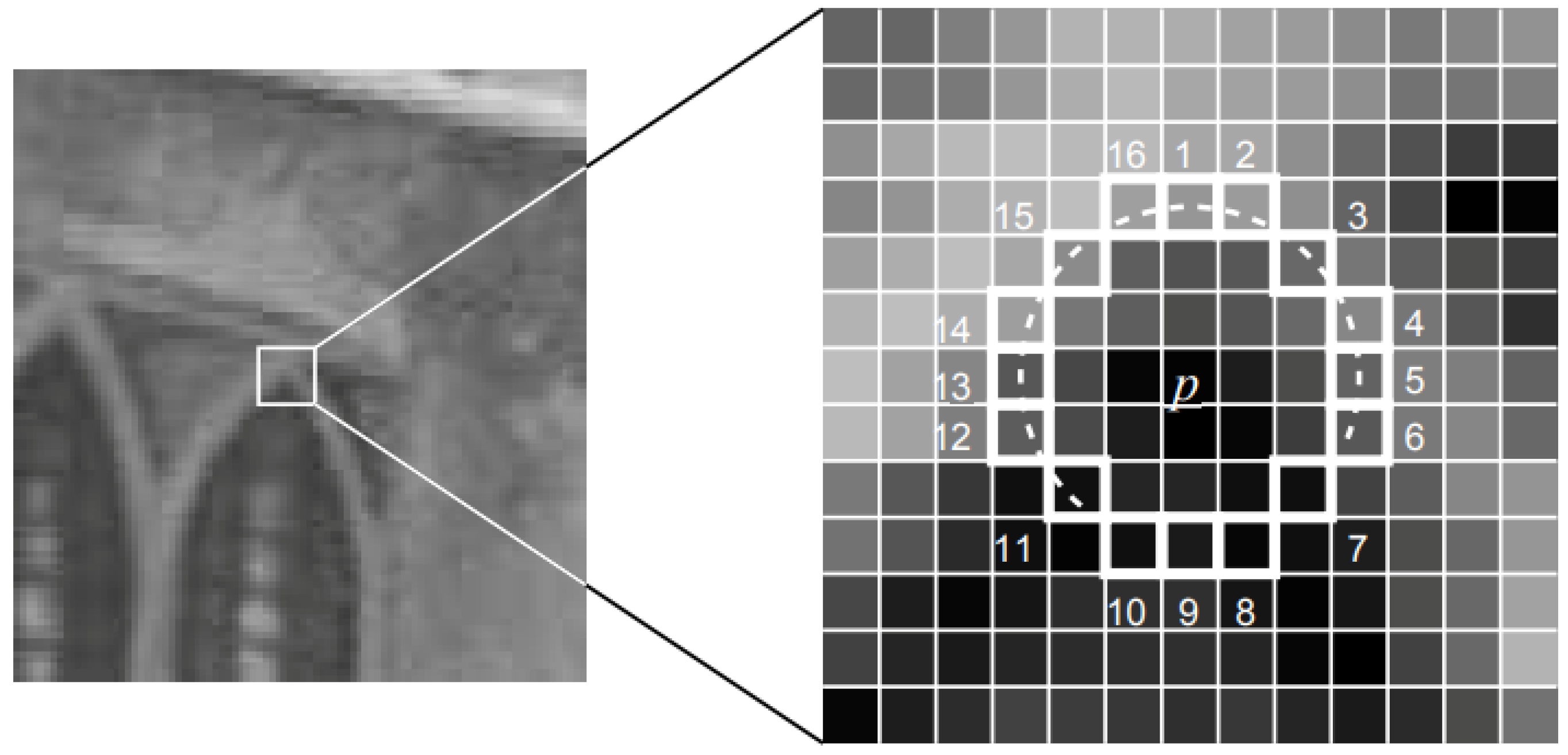
After the accurate image registration, an effective corner detection method—the features from accelerated segment test (FAST) method [
34]—is applied to acquire the tie point sets. A 9 × 9 window is used to strengthen the stability of the tie point matching process, as shown in
Figure 2. The characteristics of the neighborhood of a tie point is calculated by the ratio as:
where
represents the pixel value in central point
p in
Figure 2, and
denotes the pixel value in template
k. For each ratio value, the similarity is measured by comparing it with a threshold as follows:
where
is a threshold value set defined by experience. We consider the searched point as a candidate tie point if more than half of the numbers of
of the searched point are continuous and they all equal to 1 or 2.
After the detection process, many candidate matching points are selected, while there exist some false detections and duplicate detections. In order to solve this issue, a false point elimination method is employed. First, we assign a score function to each candidate point based on its
values [
35]. For a candidate matching point, the more continuous nonzero values of
, the higher its score. Then, a non-maximal suppression is utilized to select the best matching point. The tie point sets can be obtained accurately with this efficiency method.
Traditionally, object-space coordinates of these tie point sets have been calculated with the aid of DEM [
36] or GPS data [
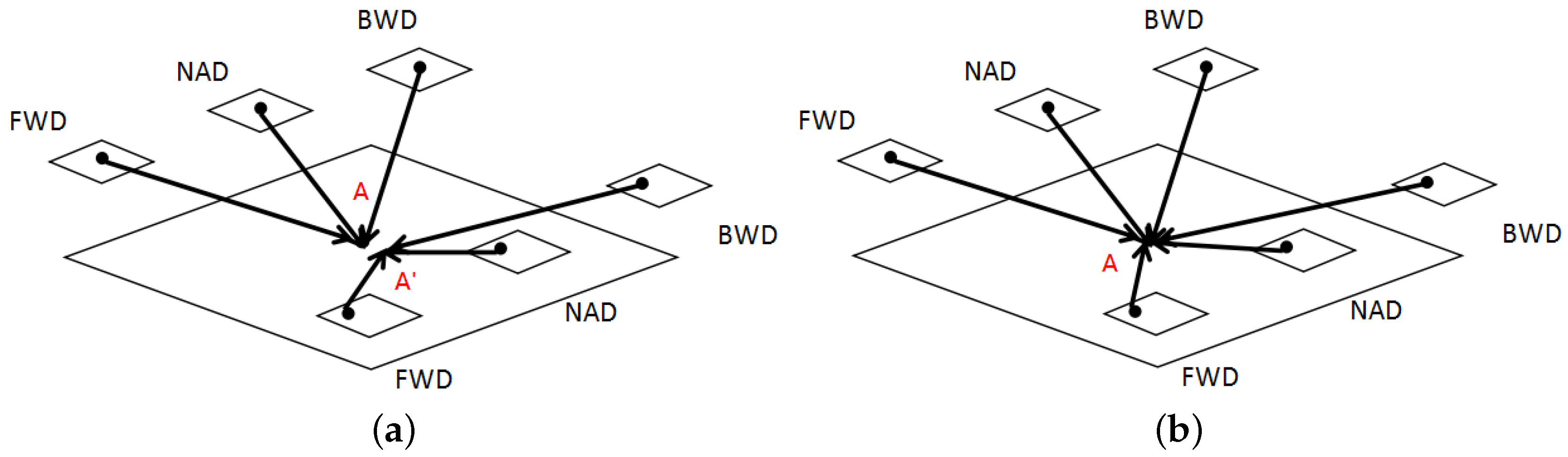
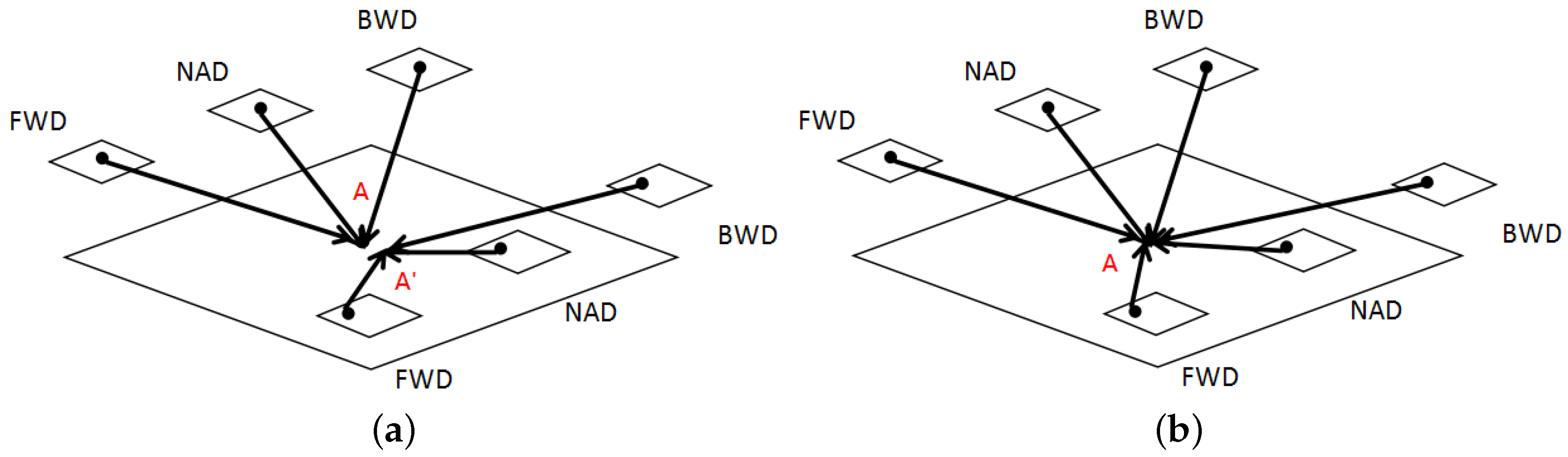
19], which means their accuracy is highly dependent on the precision of the auxiliary data. However, as the satellite acquires overlapping images, the space intersection method is suitable for ZY-3 stereo image pairs to derive initial values of these tie point sets. Moreover, traditional methods may cause the problem of weak convergence.
Figure 3a displays an example of weak convergence.
A and
are different observations of the same object at different times. Due to the systematic errors of the platform and image distortion, the calculated coordinates of
A and
with the help of each stereo image pair usually disagree. Therefore, the multi-observation dataset provides redundant information and strong constraints which can lead to faster convergence and more accurate solutions in object-space. In this procedure, all stereo image pairs which contain the same object are used together to form overdetermined equations.
with
with
where
represent the error functions between the calculated and extracted image-space coordinates in the
nth image;
are the extracted image-space coordinates of an object, and
are the object-space coordinates and
are the corrections of the object-space to be solved;
, and
are the scale and translation operators of the calculated image-space coordinates with RPCs [
6];
l is the vector of residual errors;
, and
are the rational polynomial model including 80 rational polynomial coefficients (RPCs) with degree no more than three, and
L P H ,
,
,
, and
are the rational polynomial coefficients.
To solve the overdetermined equations, the least square method (LSM) is applied. The problem of Equation (
4) can be simplified as
where
G is the design matrix which consists of the partial derivatives of
,
to
P,
L, and
H; and
l is the residual errors vector between the calculated and observed image coordinates.
Through the singular value decomposition of the designed matrix
G, the least-squares solutions can be obtained and the coordinates of the object in all images will be determined uniquely. With the help of multi-temporal images used together in the overdetermined equations, different observations will converge to the object
A as shown in
Figure 3b.
2.2. Data Classification and Preprocessing
The object-space coordinates of tie points are obtained through the space intersection step from the stereo image pairs. However, there are always some points with large geometric positioning errors compared with errors in other points which may be caused by errors in the image registration step or other factors. Therefore, points with large geometric positioning errors must be separated from the other data. Fortunately, this step can be regarded as a data classification problem. The object-space coordinates of the tie points are calculated from the extracted image-space coordinates and the RPCs, and the extracted object-space coordinates can be obtained from the space intersection step. Ideally, the original errors between these two values of the tie points should distribute around their extracted object-space coordinates within a certain range. Therefore, the density-based spatial clustering of application with noise (DBSCAN) method [
29] based on statistical learning theory which is widely used in the field of machine learning is suitable here for data screening.
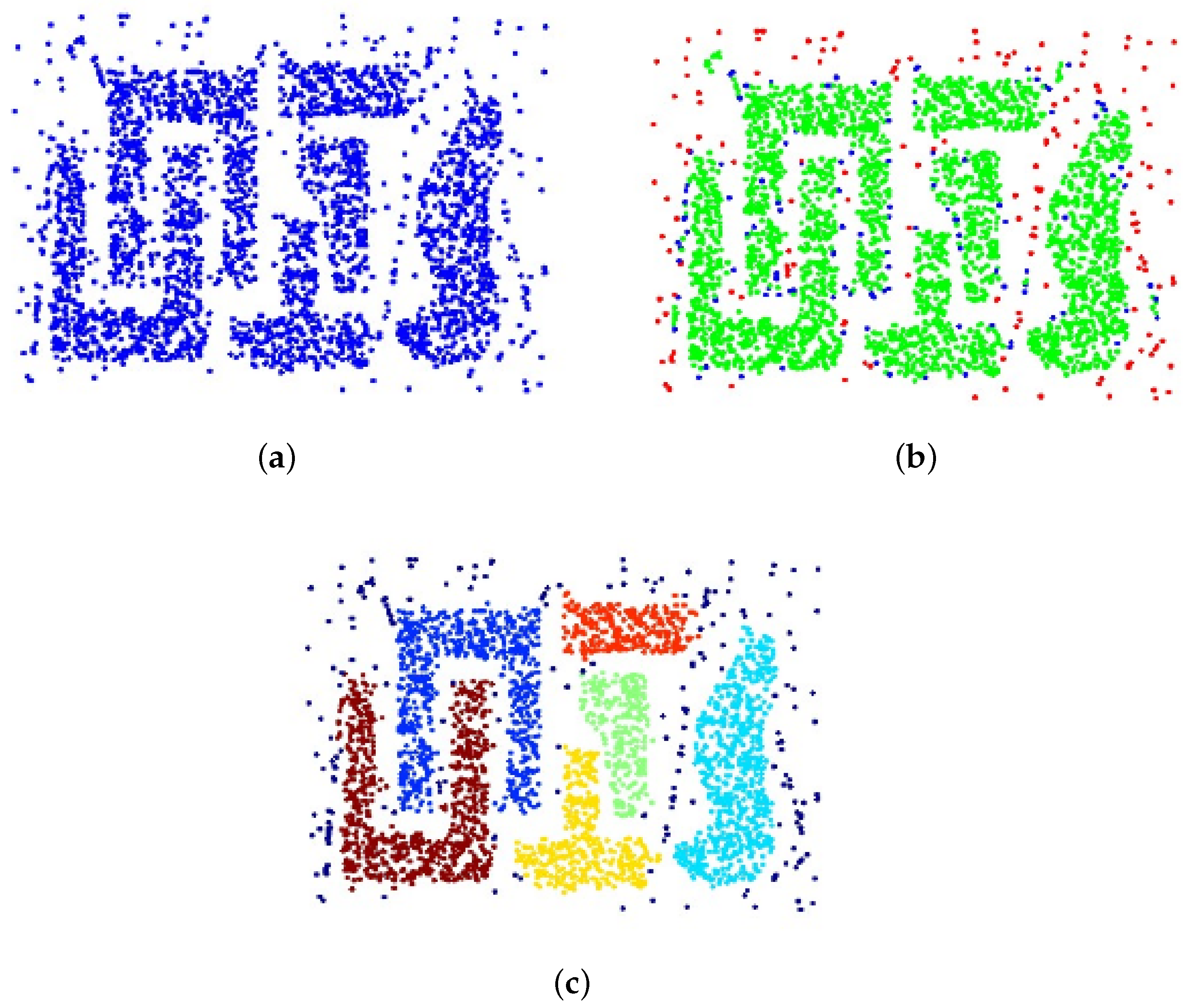
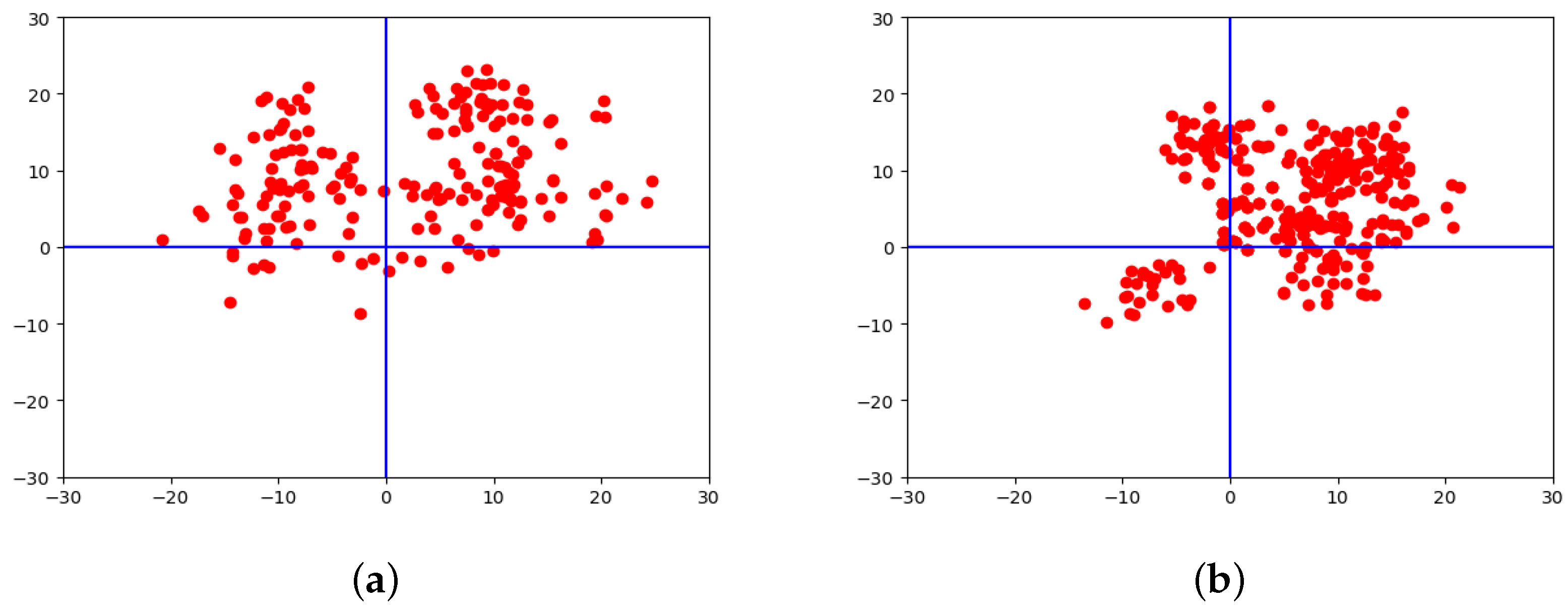
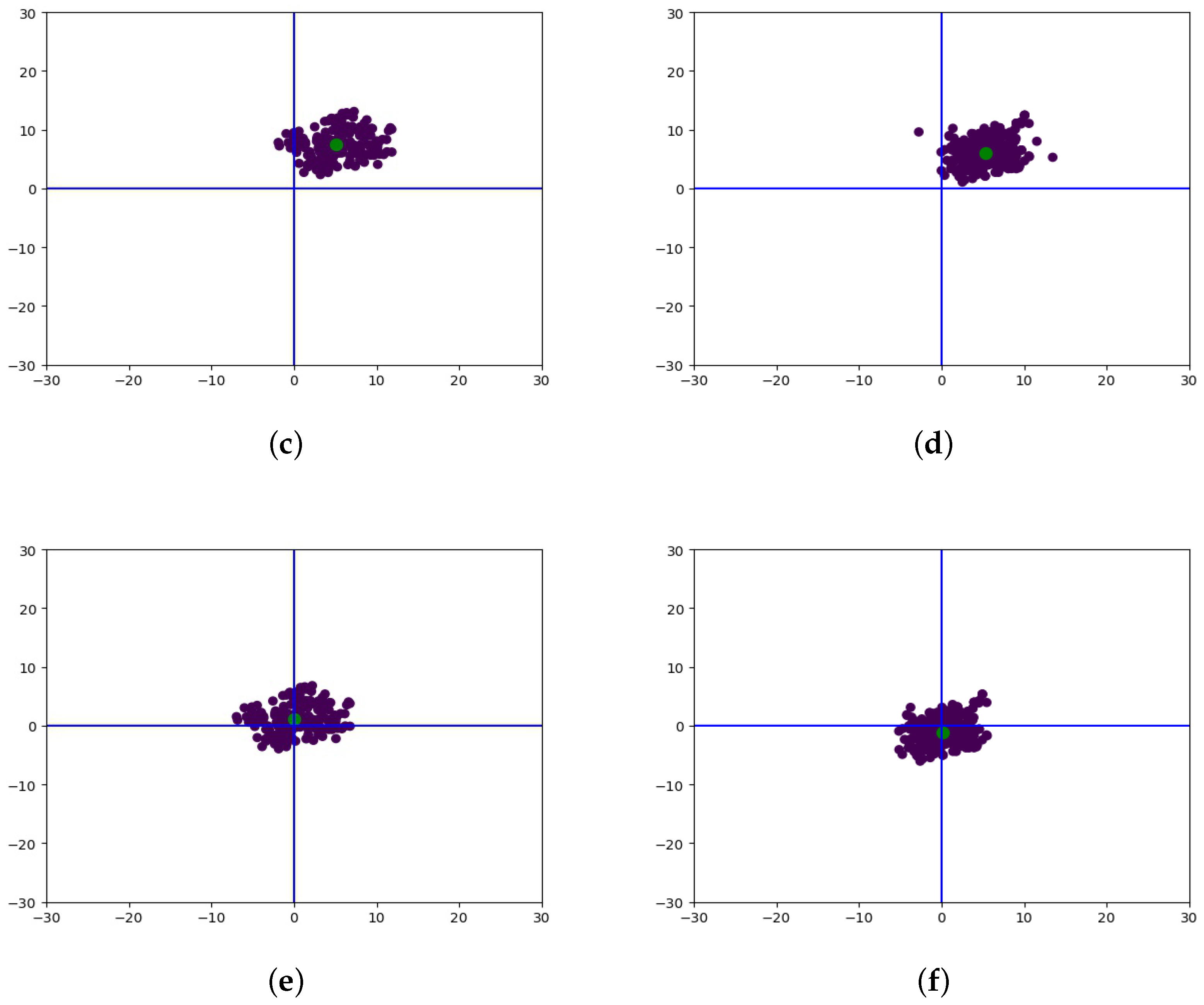
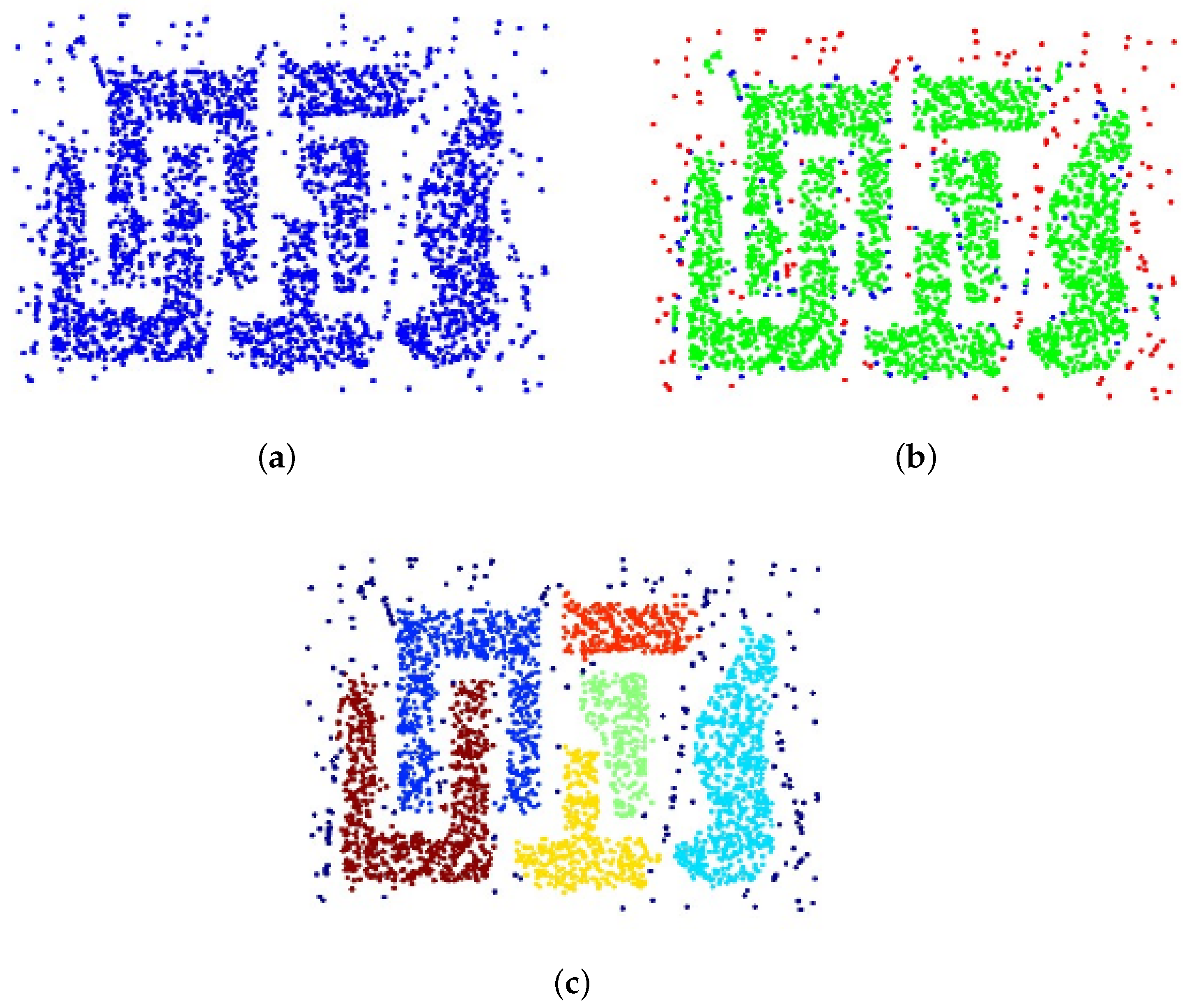
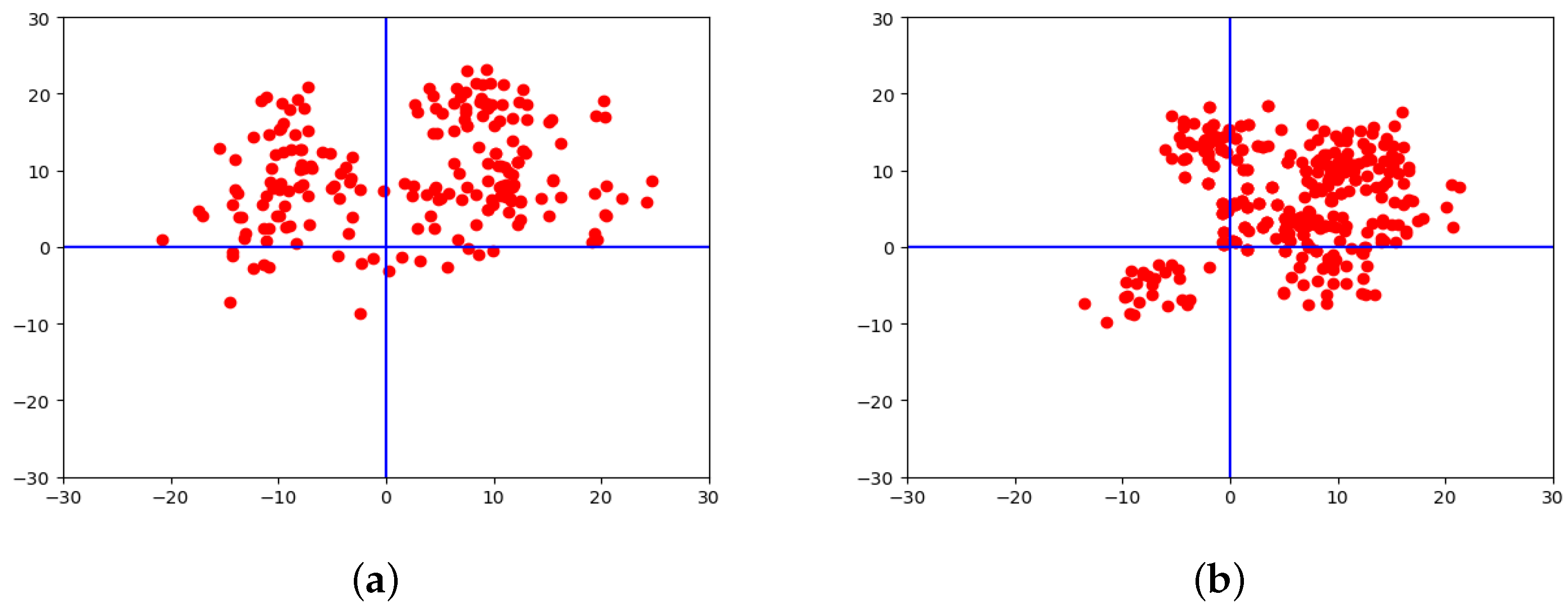
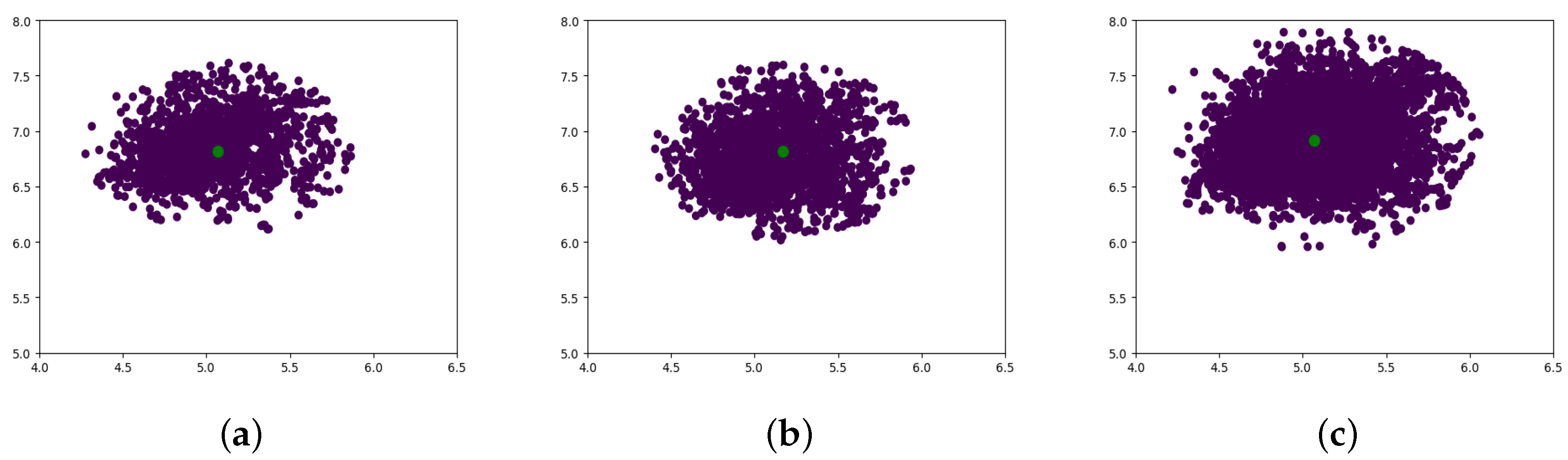
Supposing we have a dataset as shown in
Figure 4a, and all points in this dataset can be divided into three types: core points (green points distributed inside the dense regions in
Figure 4b), border points (blue points distributed at the edge of the dense regions in
Figure 4b), and noise points (red points distributed in sparse regions in
Figure 4b). In order to separate each type of these points with no a priori knowledge, their density distribution is important information that we can rely on. Two parameters are set before the density-based searching:
represents the max distance between neighborhood points in the same category and
, which means the minimum number of points in one category. Searching from one point randomly in the tested dataset at first, if there are more than
points in the
neighborhood of this point, it can be regarded as a core point and it can form a category. If the distances between points which do not belong to this category and the number of points in the formed category are smaller than
, then these points are added to the formed category. If there are points which do not belong to any category, they are regarded as noise points. In this way, different categories can be formed and the noise points are separated from each category as shown in
Figure 4c. An appropriate set of
and
can achieve a satisfactory output of the classification process. Compared with other classification algorithms, the DBSCAN algorithm can detect the number of categories in the test dataset with no bias in the shape of clusters. Moreover, noise points can be quickly separated from other information in the dataset with no prior knowledge. With the help of the DBSCAN algorithm, we classify our dataset while identifying noise points to achieve a better convergence.
2.3. Free Block Adjustment
Because of its simplicity of implementation and standardization, the rational function model is widely used as a block adjustment model for the exterior orientation of high-resolution satellite images. It describes the relationship between image space and object space by a ratio of two cubic polynomials with 80 coefficients [
6] as:
where
is the normalized image-space coordinates.
However, due to the lack of accuracy in measuring the exterior orientation elements of spaceborne sensors, the RPCs have a low precision. Therefore, an affine transformation model (AFM) is usually applied here to compensate for the bias in the RPCs to improve their precision. The AFM is defined as follows:
where
, and
are affine transformation coefficients,
and
represent the image-space coordinates determined by RPCs, and
are the real image-space coordinates measured automatically. As a result, the error equations for the least squares solution can be derived in the form of [
16]:
where
V is the residual vector,
A and
B are the design matrices which consist of the partial derivatives of
to
, and
;
t and
s are the correction vectors of the affine transformation parameters and object-space coordinates, respectively;
l is the difference of the calculated and observed image point coordinates [
17].
Moreover, Equation (
9) applying the Gauss–Newton model can be rewritten in the matrix form as follows:
where
P is the weight matrix.
For simplicity, Equation (
9) can be written as
As a result, matrices U and V are both diagonal. s and t are dependent on each other, and usually the number of unknowns in s is much larger than t. Therefore, we use a Gauss elimination method to reduce the complexity of the unknown matrix, and the normal equation is reduced to
2.4. Weight Strategy
In order to acquire a better convergence of the results, a good weight strategy plays an important role in the iteration step. However, researchers have seldom mentioned it in detail in their papers. With gross points removed from the experimental dataset in the data classification and preprocessing step, we can make sure that values of all tie points are valid estimations. Thus, it is appropriate to apply a stable and effective weight strategy. In our study, all observations are independent and the measurement accuracy of each element in
s is the same. The bias in the RPCs of different images vary, which means that elements in the matrix
t of each image share the same value. Thus, the initial weight of
s and
t as unity. During the iteration, the weight of
s and
t are updated separately under our weight strategy as follows:
where
and
represent the weights of the
ith tie point set in
s and the weight of the
jth image in
t in the
mth iteration, respectively;
and
represent the bias and standard deviation of elements in
s, respectively;
and
are the image coordinate errors of the
tth point in the
jth image, and
is the number of image points in the
jth image;
is the standard deviation of the difference of all tie points between the calculated coordinates in the iteration step and coordinates extracted in the space intersection step in the
jth image;
is the length and width of the
jth image.
2.5. The Improved FIST Algorithm
The fast iterative shrinkage-thresholding algorithm is an advanced algorithm originating from the traditional iterative shrinkage-thresholding algorithm (ISTA). It is a popular algorithm in solving the minimization of the L1 norm problem in the compressive sensing field. Based on the algorithm proposed by Nesterov to solve the problem of minimizing smooth convex functions, the FIST algorithm has proved to be an “optimal” method at first order in algorithm complexity [
25]. This method is attractive due to its simplicity and suitability for solving large-scale problems as well as achieving better convergence.
Considering a basic linear inverse problem as
with an ill-conditioned coefficient matrix A, regularization methods are required to stabilize the solution, in which
regularization has attracted a revival of interest and a considerable amount of attention. In this way, the linear inverse problem can be expressed as follows:
with
is the Lipschitz constant of
. An approximate mapping of the problem is [
26]
where
is the fixed step size within the range of
to guarantee the convergence of Equation (
18). To solve Equation (
18), the FIST algorithm consists of the following three steps:
(1) Initialization: = 0, = , = 1,.
(3) Estimation: if < , then is the expected result; else return to the iteration step. where is the unknowns vector, is a combination vector of the unknowns.
To accelerate the rate of convergence in the above iteration, an improved step size operator
based on the Barzilai–Borwein (BB) algorithm [
37] is applied, and the iteration step can be rewritten as (2) Iteration:
where
is the ratio of
and
, which represents the rate of convergence;
is an arithmetic factor to guarantee the convergence of the iteration. According to the Barzilai–Borwein (BB) algorithm [
37], the iteration step factor can be decided by the information from the current iteration and the former one which represents the rate of convergence at
.
Compared with the traditional FIST algorithm, the parameters cannot only optimize the iteration step of , but also contribute to better convergence rates. Furthermore, the parameter is a specific linear combination of , which can significantly outperform the traditional IST algorithm and other classical gradient methods.
2.6. Inherent Error Compensation Model
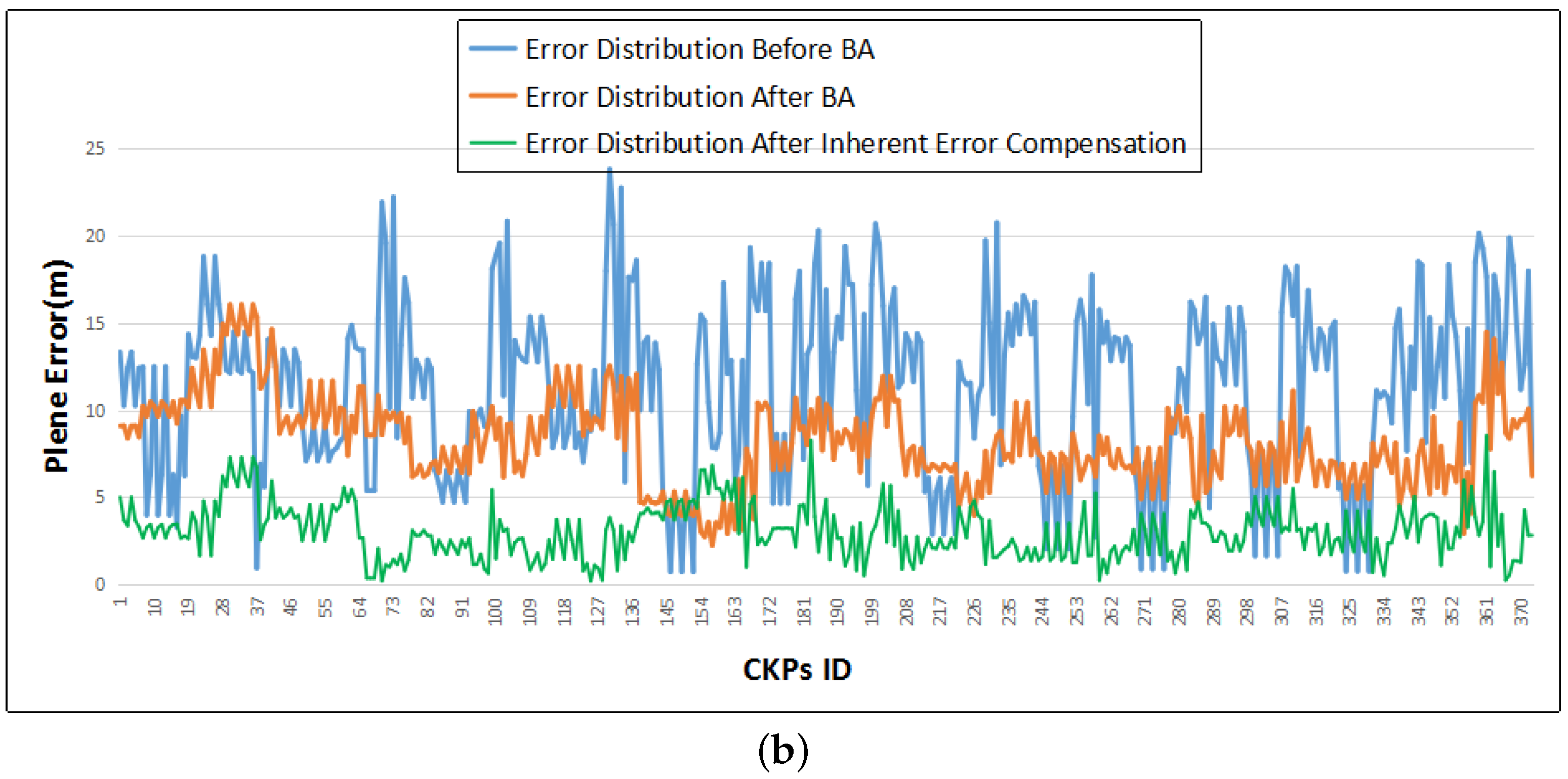
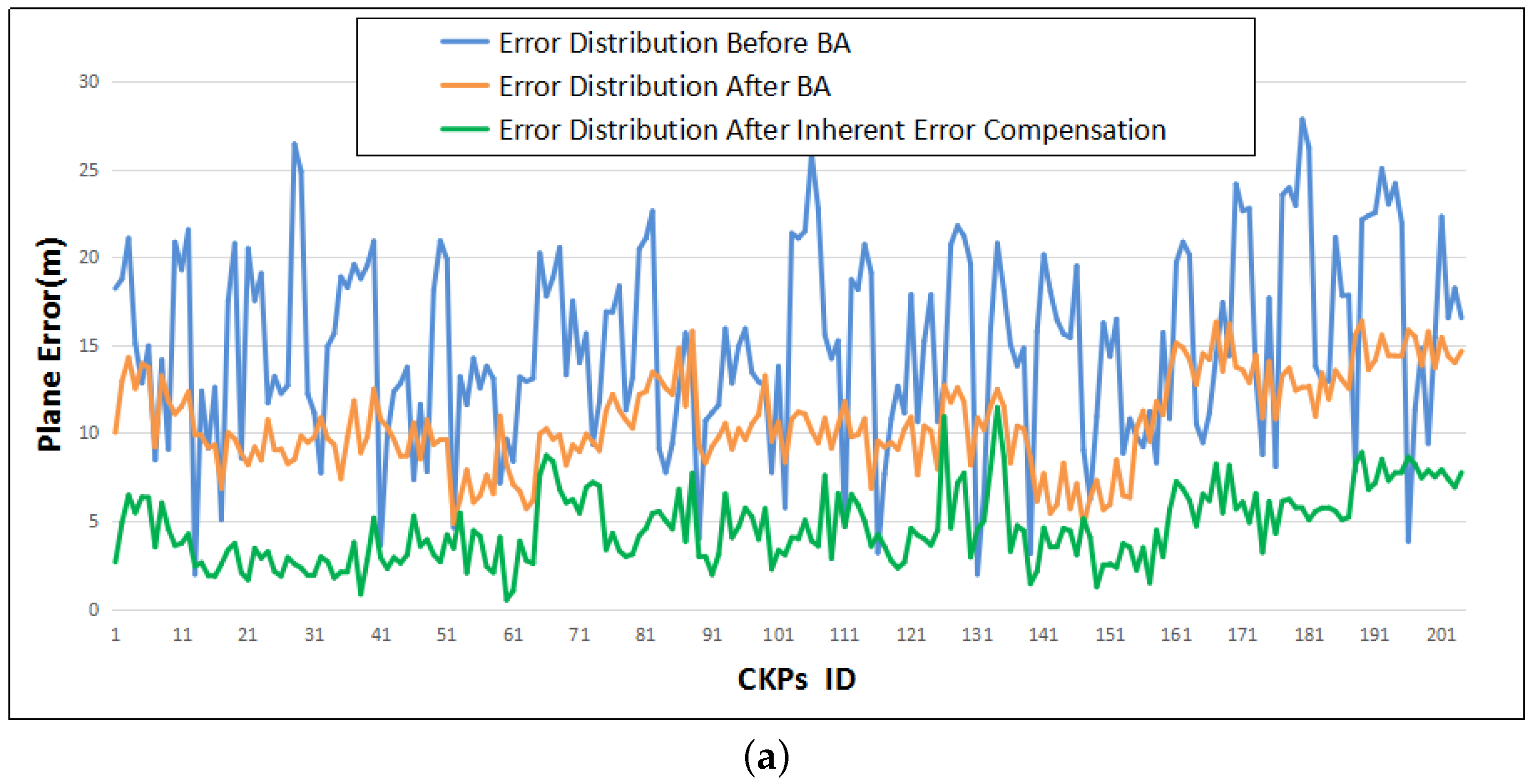
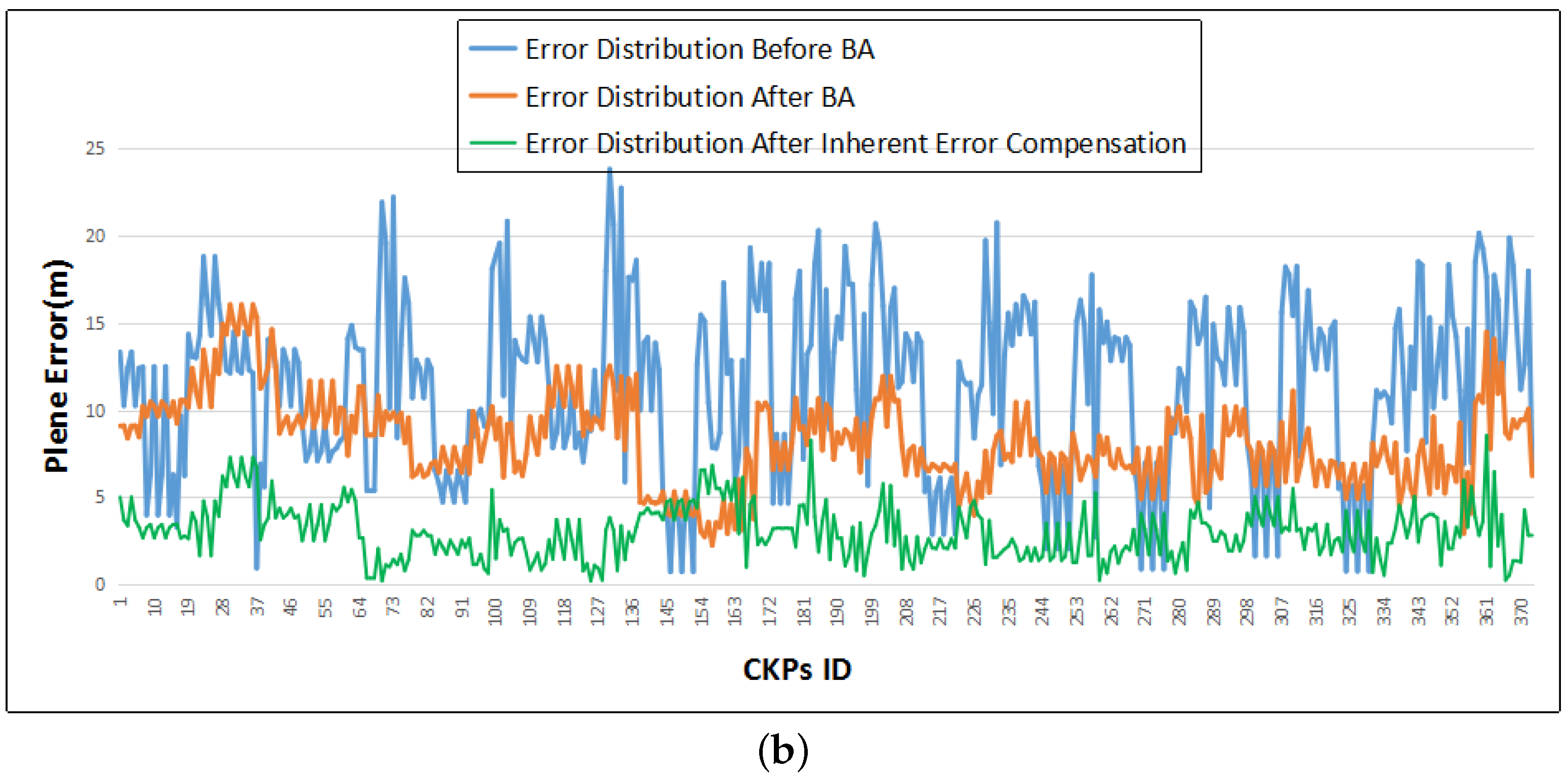
With the random errors reduced efficiently by the above free block adjustment model, the remaining errors are mainly composed of three parts: errors due to the inaccuracy of RPCs, systematic errors, and image points errors. Errors of image points and RPCs can be constrained into a small range with an affine transformation model added in the free block adjustment procedure. Furthermore, the RPCs are an approximation of the rigorous sensor model, which means errors due to the inaccuracy of RPCs originate from the systematic errors of the satellite platform to some extent. The systematic errors include errors of the satellite orientation such as those due to position, altitude, camera, jitter, etc. Most of the systematic errors of the satellite platform can be corrected manually to a great extent. However, there will always be residual errors in the satellite orientation caused by the limitations of current technology, which is the cause of the bias between RPCs and the real sensor model. Therefore, the analysis of the distribution of the residual errors based on the statistical learning theory is an important aspect in our experiment.
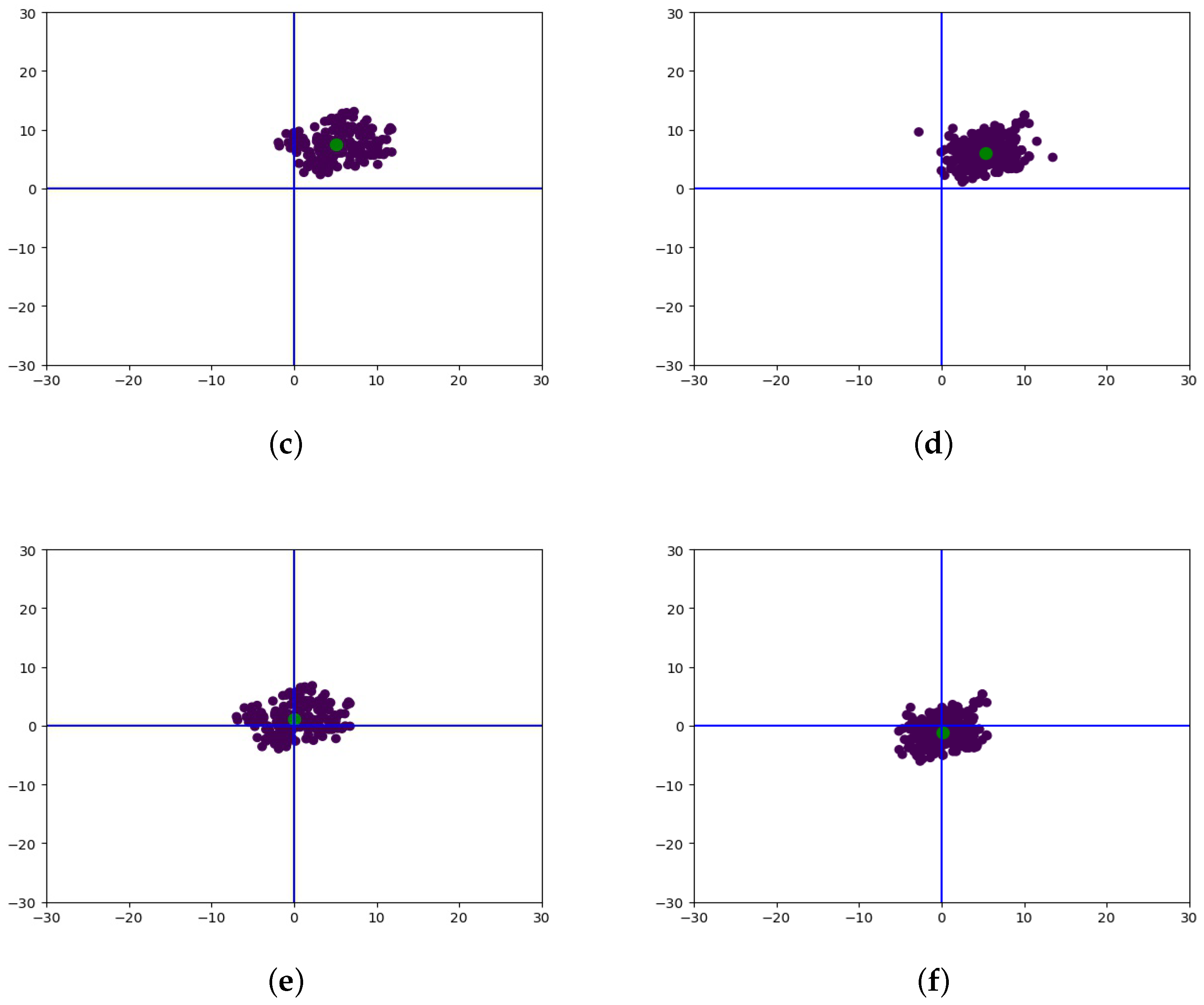
Firstly, the residual errors of all tie points after block adjustment are clustered by the DBSCAN algorithm and graphed with the aid of location information. Considering the statistical property of our dataset, experimental data with few noise points are analysed and a cluster center is obtained. Since all residual errors in images from a stable sensor on the satellite platform may share the same inherent errors, all errors should have the same distribution after control point free block adjustment. Without ground control points, the actual bias between the calculated coordinates and actual coordinates is unknown. Thus, the average of the calculated coordinates contains the inherent errors of the sensor before they are removed from each point, given that the block adjustment method without GCPs does not enable their determination. Corrections based on a rigorous sensor model are helpful in restricting systematic errors of the sensor, but are not suitable for a general rational function model with RPCs. A control point free block adjustment method can result in better convergence of the computation of the correspondence between images by reducing the random errors, which means a high precision of relative positioning accuracy can be achieved. Since systematic errors exist during the whole process of block adjustment, the statistical analysis is helpful in handling them.
According to the analysis above, residual errors after control point free block adjustment are mainly the systematic errors of the sensor with small RPC errors and images point errors, which we refer to as inherent errors. Therefore, the error distributions of all tie points are consistent. Furthermore, the relationship between the relative positions of images with respect to each other are improved greatly by the above free block adjustment method. We need to improve the absolute geometric positioning accuracy. Considering that the clustering center of all residual errors are the same, an affine transform model in image-space is inefficient and not straightforward. In order to achieve accurate absolute positioning, a perspective transformation model of the object-space is added as an additional condition. The scale of errors in object-space are quite different from that in image-space, and a 1 pixel difference in image space can cause a 3 m error in the object-space. Therefore, a constraint in the object-space based on the perspective transformation model is appended with a translation model in the image-space as follows:
where
are the estimated inherent errors obtained from the former experiment of the homologous dataset in the direction of longitude and latitude, or the direction of the along-track and cross-track;
is the average of the calculated object-space coordinates
, and
are the residual errors of the object-space coordinates. In order to simplify the computation, a linear transformation model of the image-space coordinates is applied as a result of the achievement of the free block adjustment. The last three lines of Equation (
21) can be written in matrix form as:
where the vector of
is a translation coefficient in object-space obtained according to the distribution of inherent errors, which is the main compensation item of the formula. The matrix which includes the elements from
to
of Equation (
22) are aimed to strengthen the relative relationships between images in both image-space and object-space. Equation (
22) originates from the perspective transformation in the object-space as



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}