Angle Measurement of Objects outside the Linear Field of View of a Strapdown Semi-Active Laser Seeker


Abstract
:1. Introduction
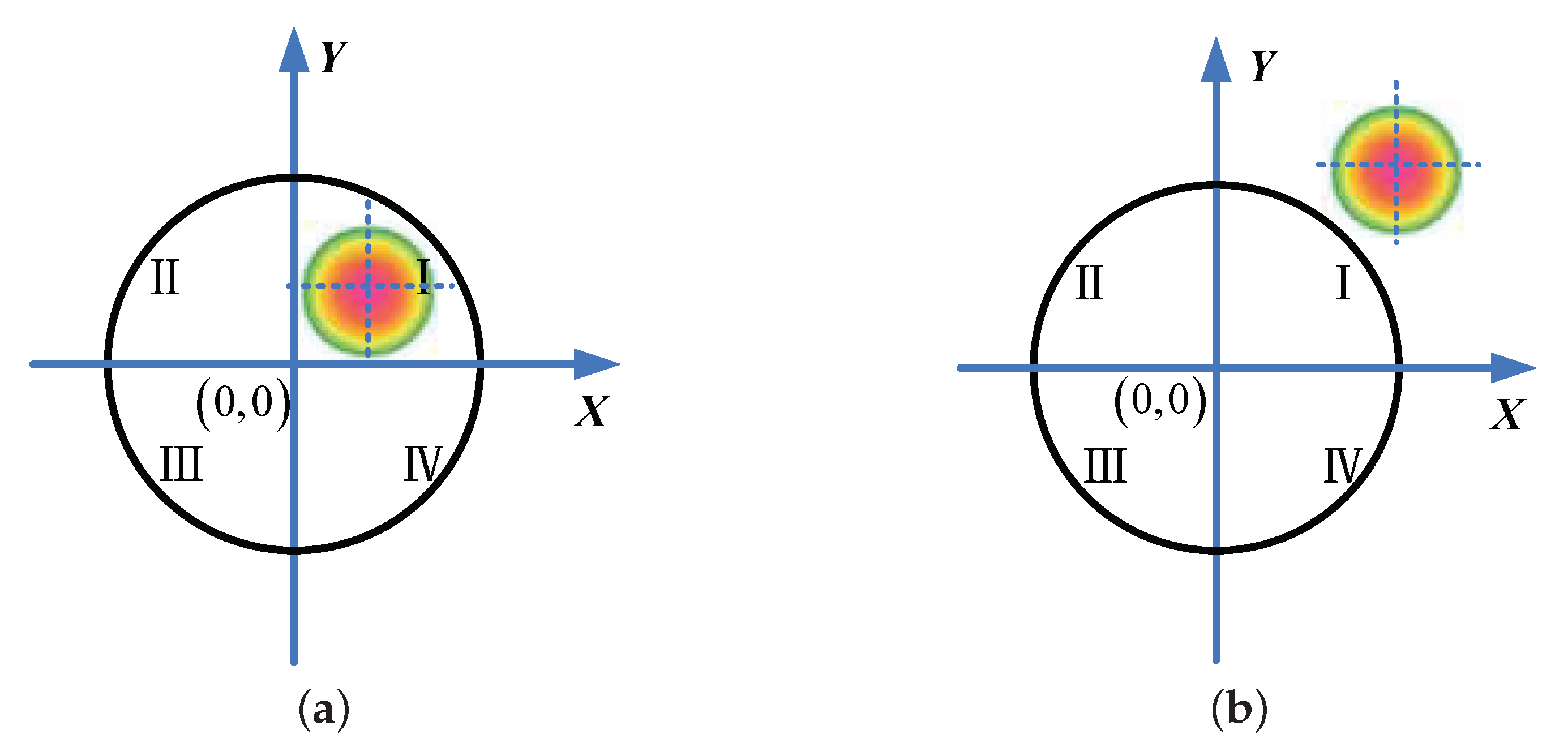
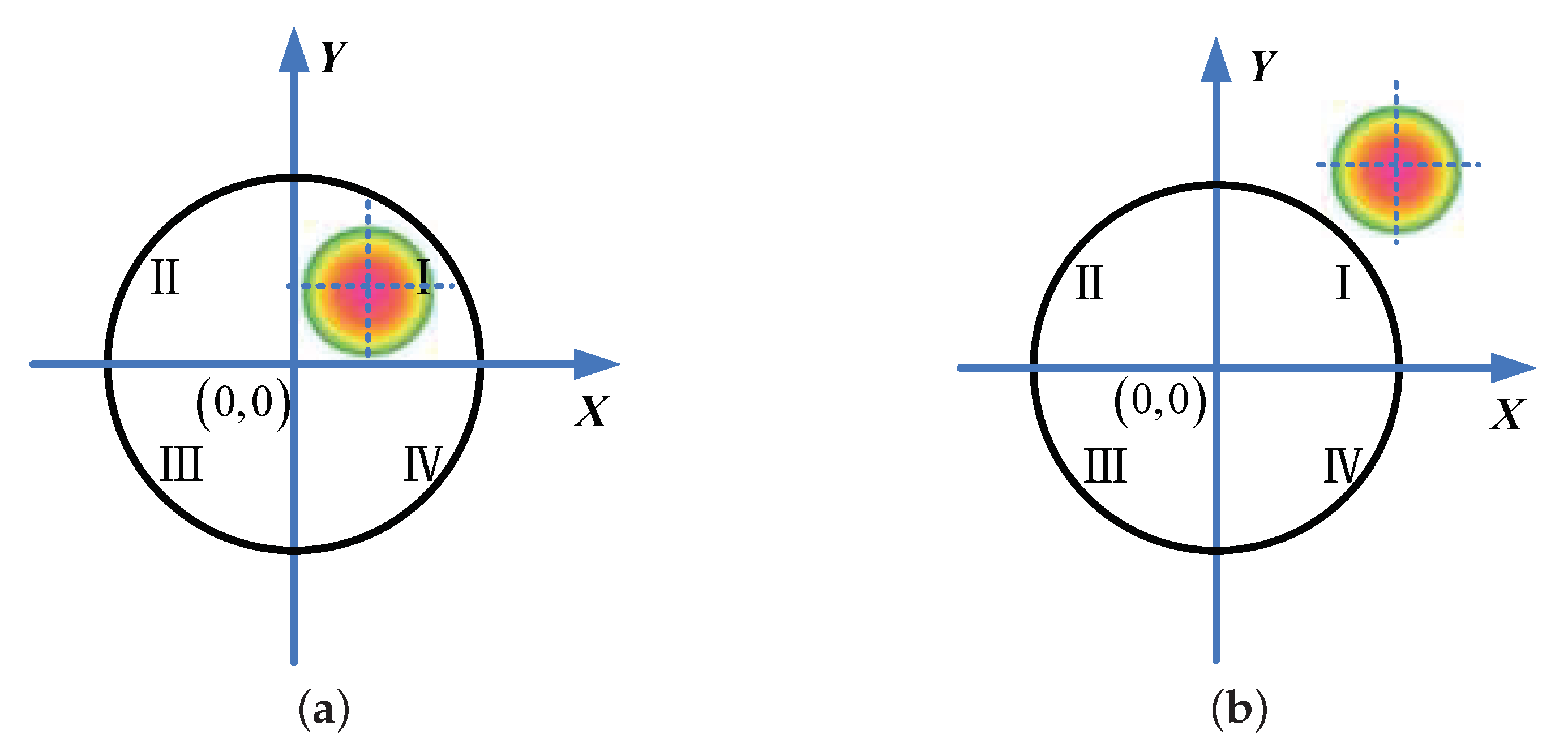
1.1. Detection Principle of the Strapdown Semi-Active Laser Seeker
1.2. Related Work
2. Proposed Method
2.1. Definition of Variables
2.2. Definitions of the Coordinate Systems
2.3. Analysis and Computation of the Proposed Method
2.3.1. First Stage of the Proposed Method
2.3.2. Second Stage of the Proposed Method
3. Numerical Simulation Results
3.1. Numerical Simulation Setups
3.2. Numerical Simulation Results
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| FOV | linear field of view |
| INS | inertial navigation system |
| MEMS | micro electromechanical systems |
References
- Robert, A.N.; Harold, L. Copperhead Semiactive Laser Guidance System Development. J. Guid. Control Dynam. 1979, 2, 374–381. [Google Scholar] [CrossRef]
- Hubbard, K.; Katulka, G.; Lyon, D.; Petrick, D.; Fresconi, F.; Horwath, T. Low-Cost Semi-Active Laser Seekers for US Army Application. In Proceedings of the International Telemetering Conference, San Diego, CA, USA, 27–30 October 2008. [Google Scholar]
- Allen, R.; Volpi, J.; Roemerman, S. COTS lens and detector characterization for low cost, miniature SAL seekers. In Proceedings of the Aiaa Guidance, Navigation, and Control Conference, Boston, MA, USA, 19–22 August 2013. [Google Scholar]
- Titterton, D.H. Military Laser Technology and Systems; Artech House: Norwood, MA, USA, 2015. [Google Scholar]
- English, J.E.; Pittman, W.C. Polarized Semi-Active Laser Last Pulse Logic Seeker Using a Staring Focal Plane Array. U.S. Patent 6,987,256, 17 January 2006. [Google Scholar]
- Taylor, B.; Schaub, M.; Jenkins, D. Projectile Guidance System Including a Compact Semi-Active Laser Seeker. U.S. Patent 8,207,481, 26 June 2012. [Google Scholar]
- Zhang, L.; Yang, Y.; Xia, W.; Zhu, X.; Chen, W.; Lu, Y. Linearity of quadrant avalanche photodiode in laser tracking system. Chin. Opt. Lett. 2009, 7, 728–731. [Google Scholar] [CrossRef]
- Zhang, X.; Du, Z.Y.; Qiao, Y.F. Study on linear field of strapdown semi-active laser seeker. Chin. Opti. 2015, 8, 415–421. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, Y.S.; Geng, T.W.; Tao, C. Study on Main Factors Affecting Position Detection Accuracy of Four-Quadrant Detector. Chin. J. Lasers 2015, 42, 1217002. [Google Scholar] [CrossRef]
- Tang, Y.; Gu, G.; Qian, W.; Chen, Q.; Jun, Z. Laser spot center location algorithm of four-quadrant detector based on Gaussian distribution. Infrared Laser Eng. 2017, 46, 206003. [Google Scholar] [CrossRef]
- Cheng, X.; Yang, Y.; Hao, Q. Analysis of the Effects of Thermal Environment on Optical Systems for Navigation Guidance and Control in Supersonic Aircraft Based on Empirical Equations. Sensors 2016, 16, 1717. [Google Scholar] [CrossRef] [PubMed]
- Waldmann, J. Line-of-sight rate estimation and linearizing control of an imaging seeker in a tactical missile guided by proportional navigation. IEEE Trans. Control Syst. Technol. 2002, 10, 556–567. [Google Scholar] [CrossRef]
- Gapiński, D.; Krzysztofik, I.; Koruba, Z. Analysis of the dynamics and control of the modified optical target seeker used in anti-aircraft rocket missiles. J. Theor. Applied Mech. 2014, 52, 629–639. [Google Scholar]
- Lee, C.H.; Hyun, C.; Lee, J.G.; Choi, J.Y.; Sung, S. A hybrid guidance law for a strapdown seeker to maintain lock-on conditions against high speed targets. J. Electr. Eng. Technol. 2013, 8, 190–196. [Google Scholar] [CrossRef]
- Fan, J.; An, X.; Lin, P.; Dong, S. A modified biased pursuit guidance for missile with strapdown seeker. In Proceedings of the 2015 Chinese Automation Congress, Wuhan, China, 27–29 November 2015; pp. 1815–1818. [Google Scholar] [CrossRef]
- Wei, C.Z.; Han, Y.P.; Cui, N.G.; Xu, H.C. Fifth-Degree Cubature Kalman Filter Estimation of Seeker Line-of-Sight Rate Using Augmented-Dimensional Model. J. Guid. Control Dynam. 2017, 40, 1–8. [Google Scholar] [CrossRef]
- Hartman, R.L.; Griffin, R.W. Faceted Ball Lens for Semi-Active Laser Seeker. U.S. Patent 7,185,845, 6 March 2007. [Google Scholar]
- Zhang, J.Q.; Xie, F.; Xue, Q.S.; Xin, J.X. Laser guided lens based on four-quadrant detector. Chin. Opt. 2015, 8, 471–479. [Google Scholar] [CrossRef]
- Chen, M.; Yang, Y.; Jia, X.; Gao, H. Investigation of positioning algorithm and method for increasing the linear measurement range for four-quadrant detector. Optik Int. J. Light Electr. Opt. 2013, 124, 6806–6809. [Google Scholar] [CrossRef]
- Wei, Z.; He, Z.; Zhang, X. Optimization design of small optical detection system with large instantaneous field of view. Infrared Laser Eng. 2016, 45, 518002. [Google Scholar]
- Vergez, P.L.; Mcclendon, J.R. Optimal control and estimation for strapdown seeker guidance of tactical missiles. J. Guid. Control Dynam. 1982, 5, 225–226. [Google Scholar] [CrossRef]
- Hyslop, G.; Gerth, D.; Kraemer, J. GPS/INS integration on the standoff land attack missile (SLAM). In Proceedings of the IEEE Symposium on Position Location and Navigation. A Decade of Excellence in the Navigation Sciences, Las Vegas, NV, USA, 20–20 March 1990; pp. 407–412. [Google Scholar]
- Chu, H.J.; Tsai, G.J.; Chiang, K.W.; Duong, T.T. GPS/MEMS INS data fusion and map matching in urban areas. Sensors 2013, 13, 11280–11288. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.X.; Wang, J.L.; Hu, D.W. A New Technique for INS/GNSS Attitude and Parameter Estimation Using Online Optimization. IEEE Trans. Signal Process. 2014, 62, 2642–2655. [Google Scholar] [CrossRef]
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems; Artech House: Norwood, MA, USA, 2013. [Google Scholar]
- Piyabongkarn, D.; Rajamani, R.; Greminger, M. The development of a MEMS gyroscope for absolute angle measurement. IEEE Trans. Control Syst. Technol. 2005, 13, 185–195. [Google Scholar] [CrossRef]
- Du, S.; Sun, W.; Yang, G. MEMS IMU Error Mitigation Using Rotation Modulation Technique. Sensors 2016, 16. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time t (s) | 0 | 0.05–0.90 | 0.95–2.75 | 2.80–3.65 | 3.7–5.05 | 5.10–6.25 | 6.30–7.40 | 7.45–8.5 |
|---|---|---|---|---|---|---|---|---|
| Position relative to FOV | Linear | Nonlinear | Outside | Nonlinear | Linear | Nonlinear | Outside | Nonlinear |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, Y.; Chen, H.; Zhou, Z. Angle Measurement of Objects outside the Linear Field of View of a Strapdown Semi-Active Laser Seeker. Sensors 2018, 18, 1673. https://doi.org/10.3390/s18061673
Zheng Y, Chen H, Zhou Z. Angle Measurement of Objects outside the Linear Field of View of a Strapdown Semi-Active Laser Seeker. Sensors. 2018; 18(6):1673. https://doi.org/10.3390/s18061673
Chicago/Turabian StyleZheng, Yongbin, Huimin Chen, and Zongtan Zhou. 2018. "Angle Measurement of Objects outside the Linear Field of View of a Strapdown Semi-Active Laser Seeker" Sensors 18, no. 6: 1673. https://doi.org/10.3390/s18061673
APA StyleZheng, Y., Chen, H., & Zhou, Z. (2018). Angle Measurement of Objects outside the Linear Field of View of a Strapdown Semi-Active Laser Seeker. Sensors, 18(6), 1673. https://doi.org/10.3390/s18061673