Tactile Estimation of Molded Plastic Plates Based on the Estimated Impulse Responses of Mechanoreceptive Units


Abstract
:1. Introduction
2. Materials and Methods
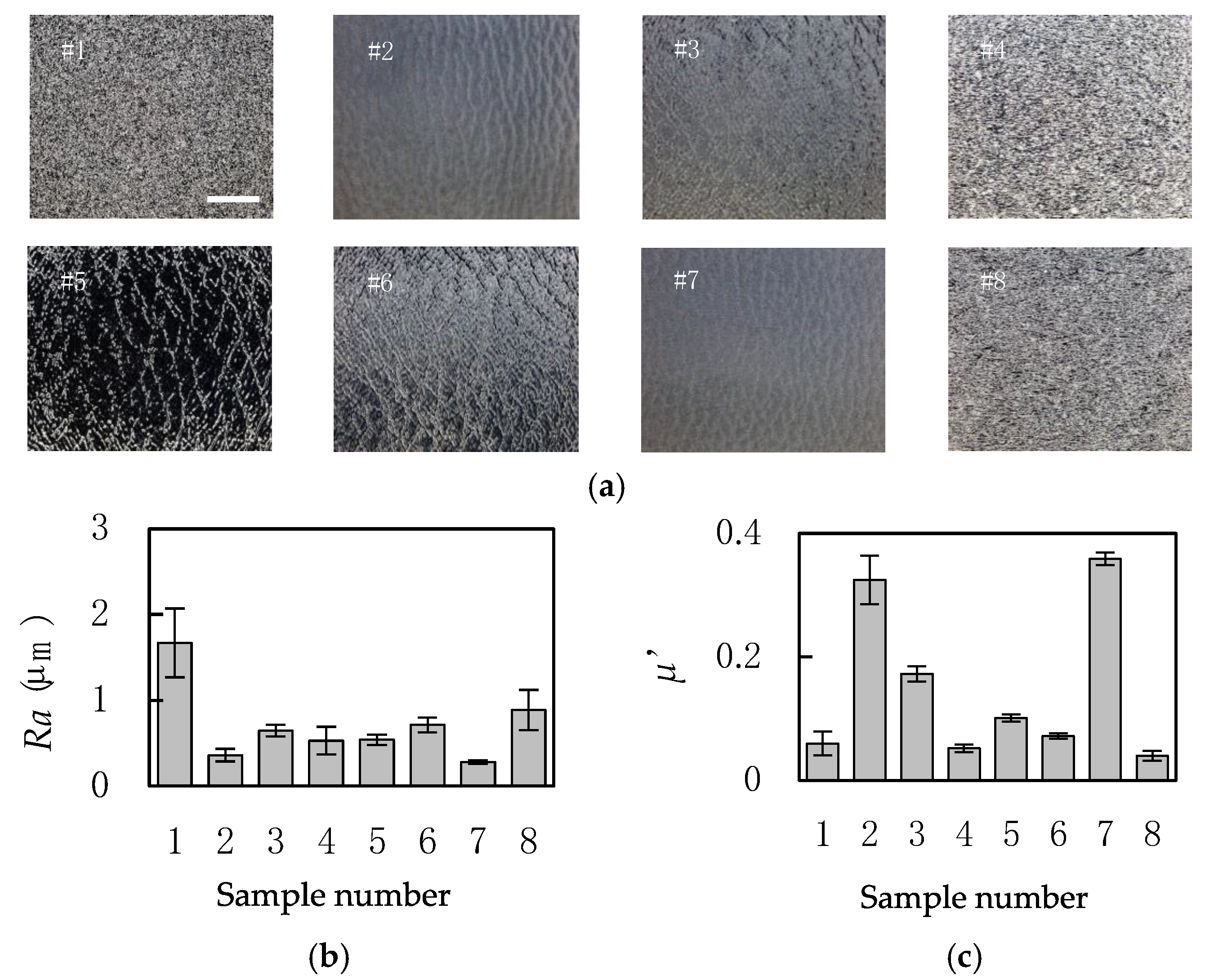
2.1. Plastic Samples
2.2. Sensory Evauation of Plastic Samples
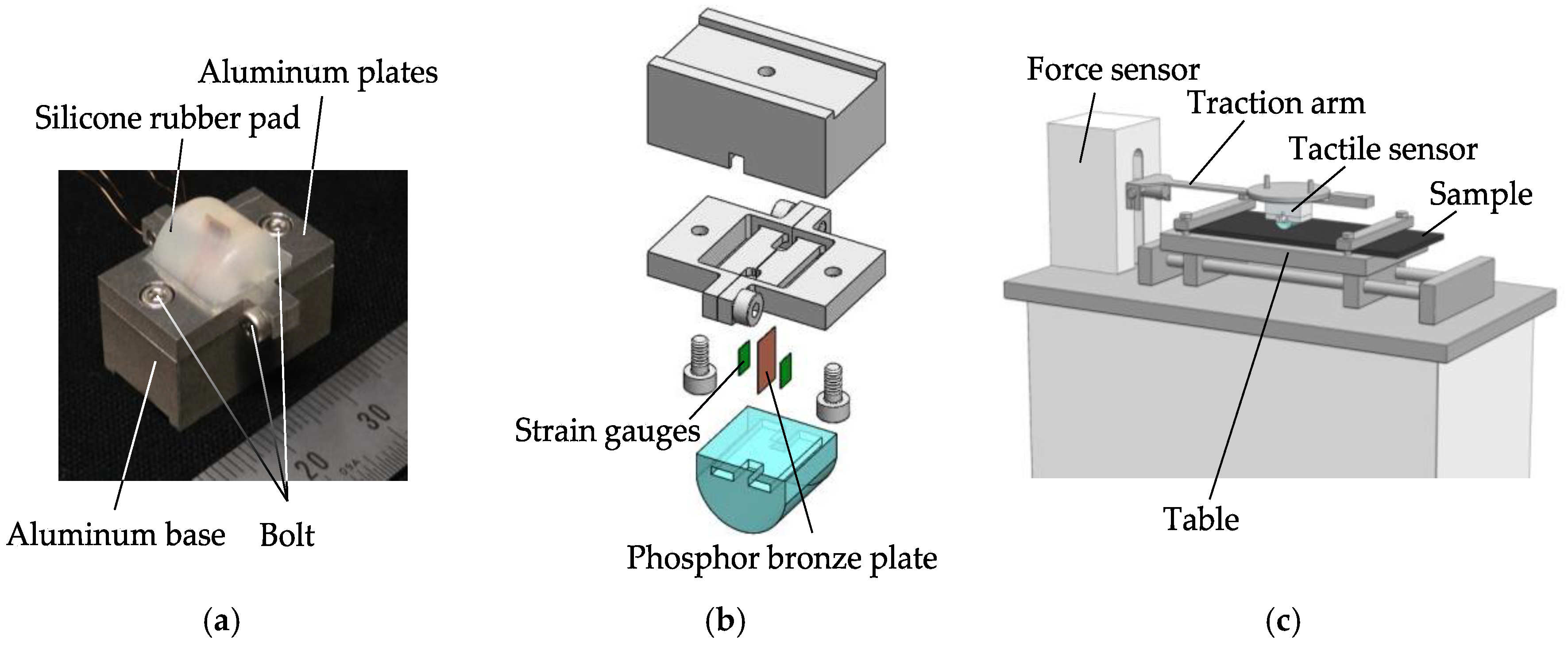
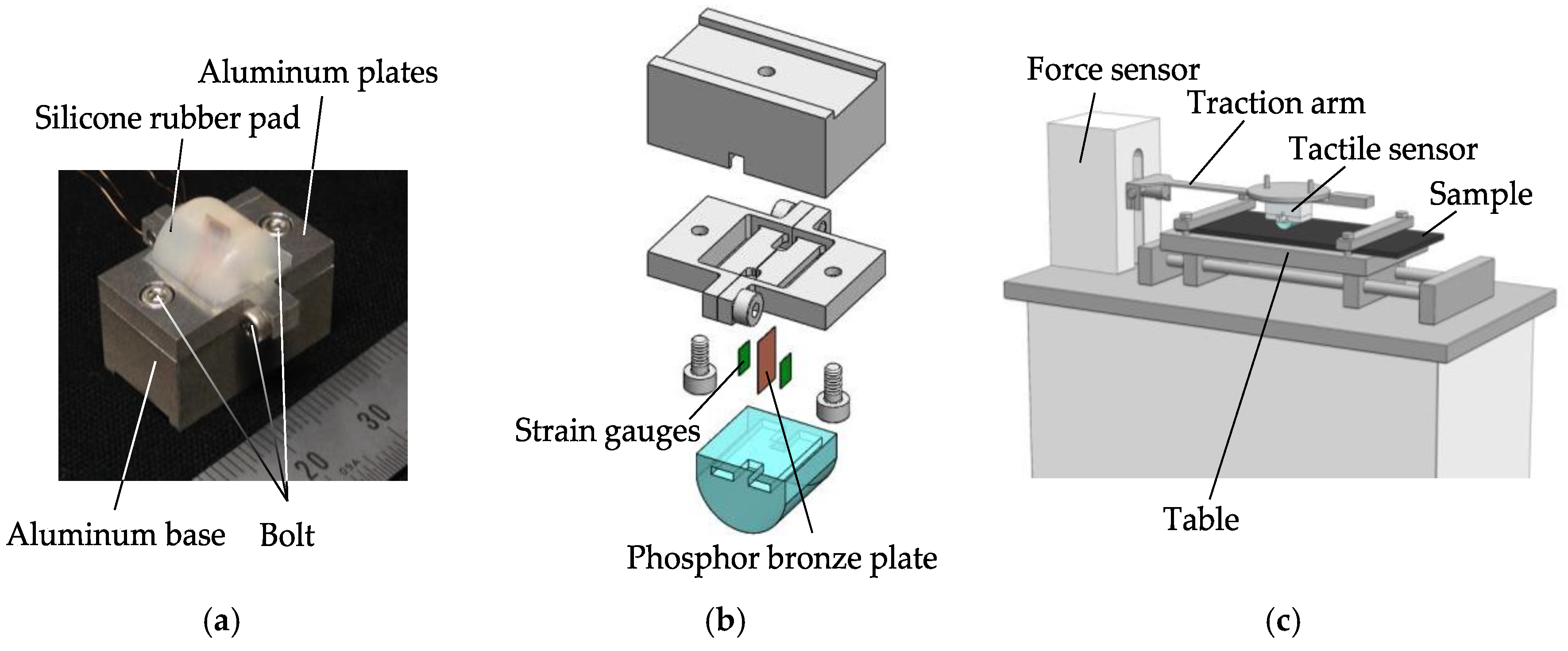
2.3. Tactile Sensing System and Experimental Conditions
2.4. Estimation Method for Firing Values of Mechanoreceptive Unit
2.5. Tactile Estimation Method—Connecting Theacquired Data and the Principal Components
3. Results and Discussion
3.1. Sensory Evaluation Results
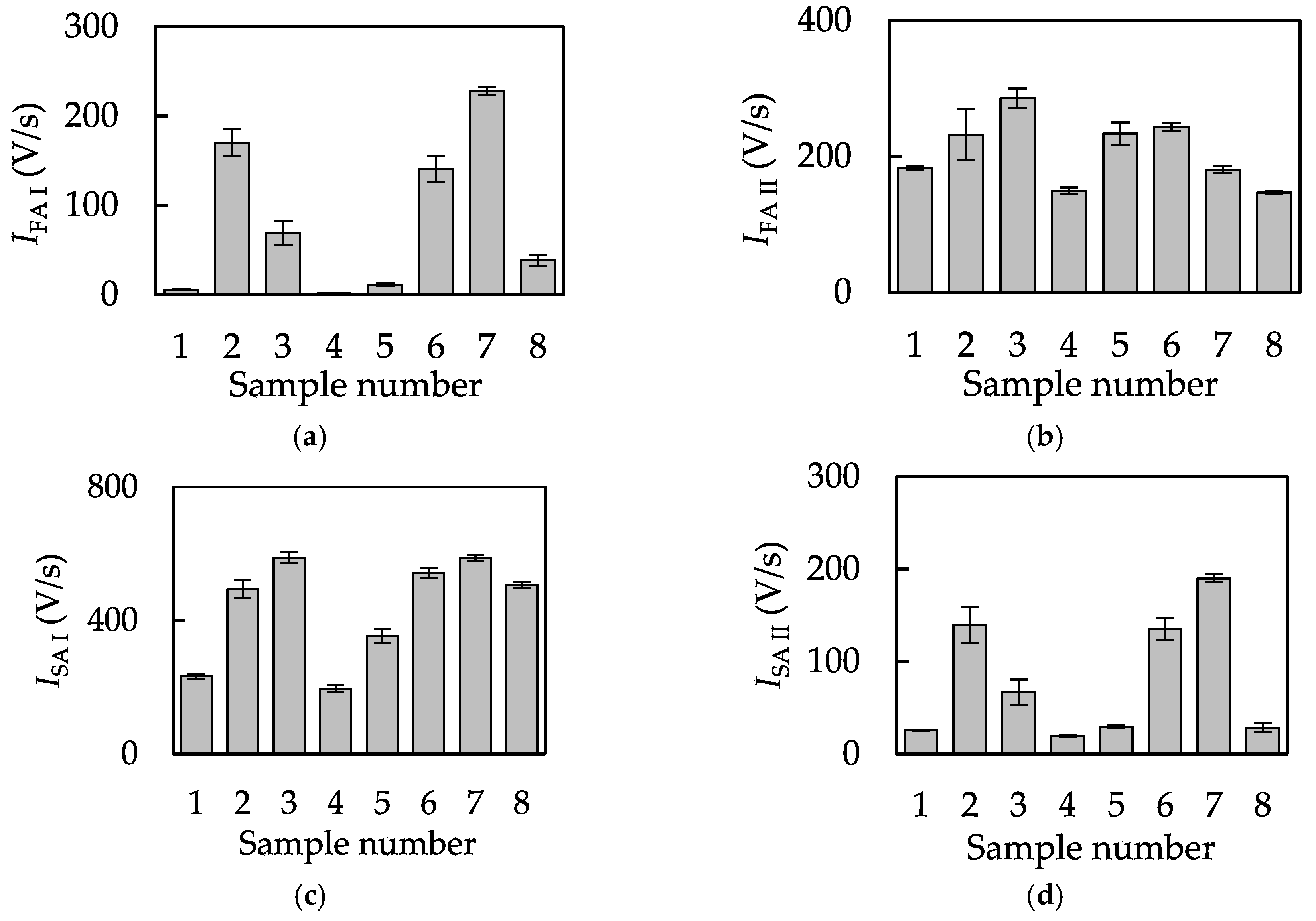
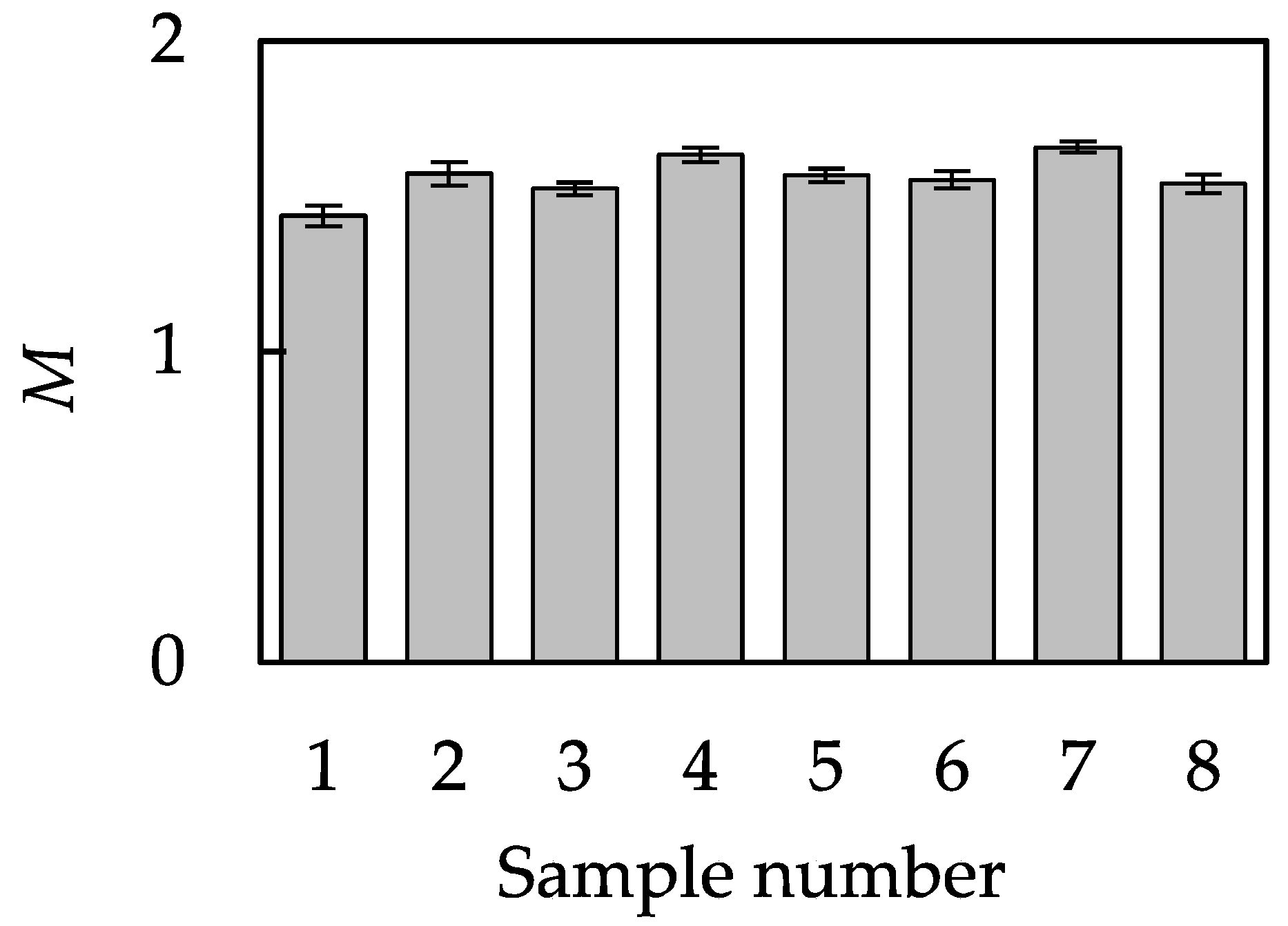
3.2. Estimated Index Values from Acquired Data
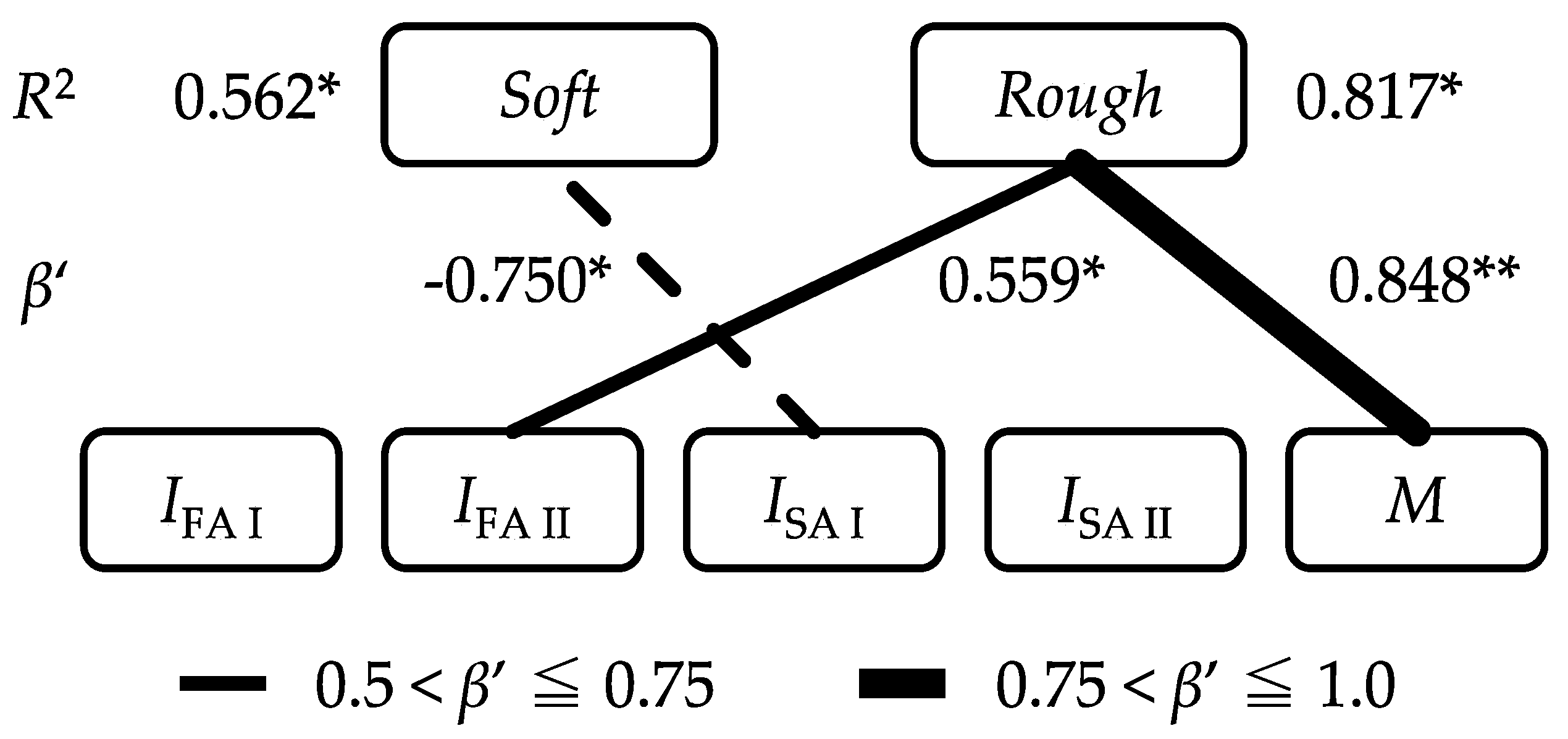
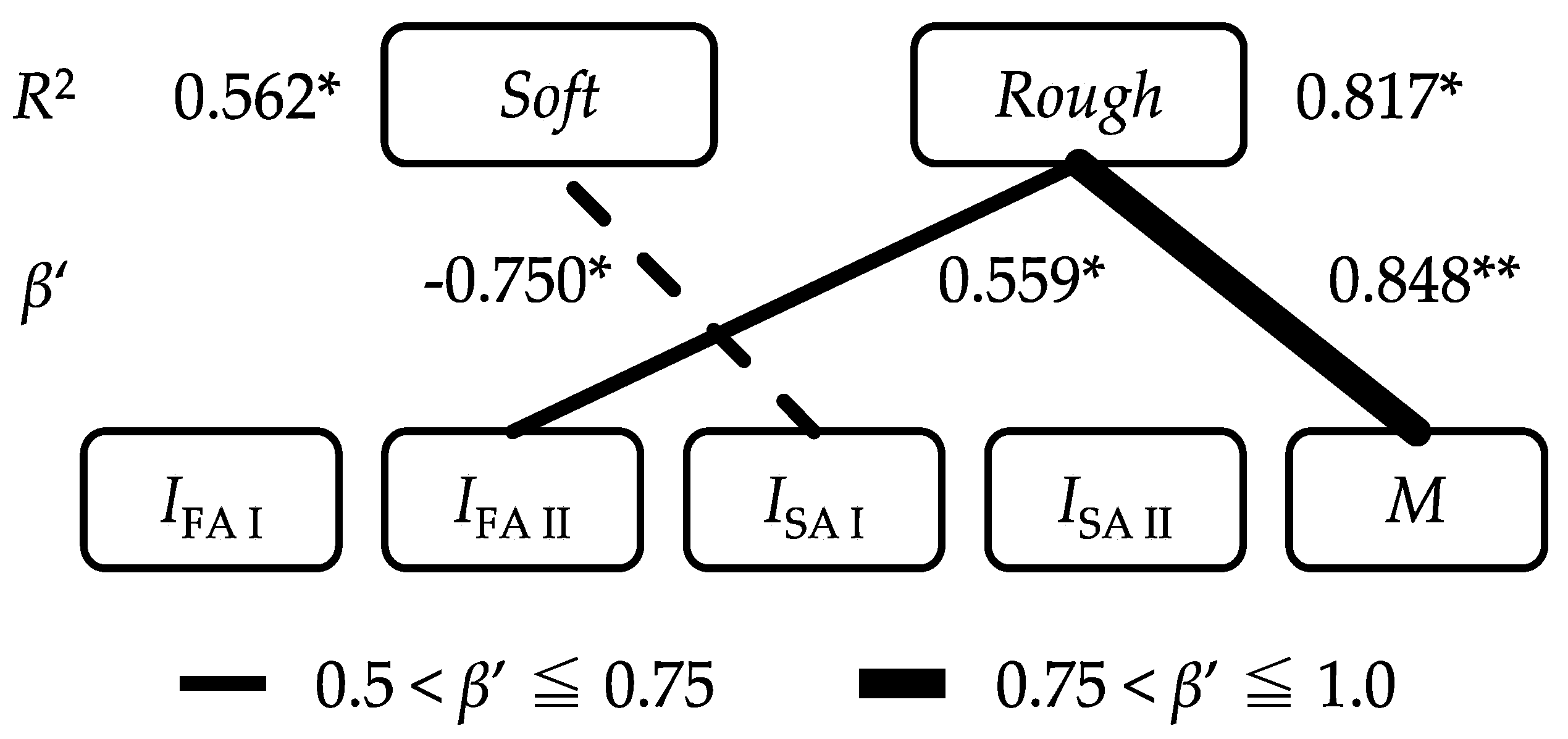
3.3. Stepwise Linear Regression Analyses
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Yazdanparast, A. Spears Can consumers forgo the need to touch products? An investigation of nonhaptic situational factors in an online context. Psychol. Mark. 2013, 30, 46–61. [Google Scholar] [CrossRef]
- Yi, Z.; Zhang, Y.; Peters, J. Bioinspired tactile sensor for surface roughness. Sens. Actuators A Phys. 2017, 255, 46–53. [Google Scholar] [CrossRef]
- Tang, W.; Zhang, J.; Chen, S.; Chen, N.; Zhu, H.; Ge, S.; Zhang, S. Tactile perception of skin and skin cream. Tribol. Lett. 2015, 59, 24. [Google Scholar] [CrossRef]
- Kawasegi, N.; Sumioka, J.; Takano, N.; Yamada, S.; Fujii, M. The microtextured plastic moldings to control human tactile sense: The texture effect enhancement due to apical shape and material frictional properties. Precis. Eng. 2016, 45, 126–135. [Google Scholar] [CrossRef]
- Ramalho, A.; Szekeres, P.; Fernandes, E. Friction and tactile perception of textile fabrics. Tribol. Int. 2013, 63, 29–33. [Google Scholar] [CrossRef]
- Thieulin, C.; Pailler-Mattei, C.; Vargiolu, R.; Lancelot, S.; Zahouani, H. Study of the tactile perception of bathroom tissues: Comparison between the sensory evaluation by a handfeel panel and a tribo-acoustic artificial finger. Colloids Surf. B Biointerfaces 2017, 150, 417–425. [Google Scholar] [CrossRef] [PubMed]
- Hu, H.; Han, Y.; Song, A.; Chen, S.; Wang, C.; Wang, Z. A Finger-Shaped Tactile Sensor for Fabric Surfaces Evaluation by 2-Dimensional Active Sliding Touch. Sensors 2014, 14, 4899–4913. [Google Scholar] [CrossRef] [PubMed]
- Song, A.; Han, Y.; Hu, H.; Li, J. A Novel Texture Sensor for Fabric Texture Measurement and Classification. IEEE Trans. Instrum. Meas. 2014, 63, 1739–1747. [Google Scholar] [CrossRef]
- Chen, S.; Ge, S.; Tang, W.; Zhang, J.; Chen, N. Tactile perception of fabrics with an artificial finger compared to human sensing. Text. Res. J. 2015, 85, 2177–2187. [Google Scholar] [CrossRef]
- Fu, J.; Li, F. A forefinger-like tactile sensor for elasticity sensing based on piezoelectric cantilevers. Sens. Actuators A Phys. 2015, 234, 351–358. [Google Scholar] [CrossRef]
- Mcglone, F.; Reilly, D. The cutaneous sensory system. Neurosci. Biobehav. Rev. 2010, 34, 148–159. [Google Scholar] [CrossRef] [PubMed]
- Chira, K.; Teissedre, P.-L. Relation between volatile composition, ellagitannin content and sensory perception of oak wood chips representing different toasting processes. Eur. Food Res. Technol. 2013, 236, 735–746. [Google Scholar] [CrossRef]
- Roh, E.K.; Oh, K.W.; Kim, S.H. Classification of synthetic polyurethane leather by mechanical properties according to consumers’ preference for fashion items. Fibers Polym. 2013, 14, 1731–1738. [Google Scholar] [CrossRef]
- Greenspan, J.D.; Bolanowski, S.J. The Psychophysics of Tactile Perception and its Peripheral Physiological Basis. In Pain and Touch; Elsevier: Amsterdam, The Netherlands, 1996; pp. 25–103. ISBN 9780124269101. [Google Scholar]
- Johansson, R.S.; Landstrom, U.; Lundstrom, R. Responses of mechanoreceptive afferent units in the glabrous skin of the human hand to vibration. Brain Res. 1982, 244, 17–25. [Google Scholar] [CrossRef]
- Gescheider, G.A.; Bolanowski, S.J.; Hardick, K.R. The frequency selectivity of information-processing channels in the tactile sensory system. Somatosens. Mot. Res. 2001, 18, 191–201. [Google Scholar] [CrossRef] [PubMed]
- Bolanowski, S.J.; Gescheider, G.A.; Verrillo, R.T.; Checkosky, C.M. Four channels mediate the mechanical aspects of touch. Acoust. Soc. Am. 1988, 84, 1680–1694. [Google Scholar] [CrossRef]
- Chan, A.P.C.; Yang, Y.; Yam, M.C.H.; Lam, E.W.M.; Hu, J.Y. Exploring judicial opinion on the relationship between anabolic-androgenic steroid use and violent offending. Perform. Enhanc. Health 2016, 5, 17–23. [Google Scholar] [CrossRef]
- Horiuchi, K.; Kashimoto, A.; Tsuchiya, R.; Yokoyama, M.; Nakano, K. Relationship between tactile sensation and friction signals in cosmetic foundation. Tribol. Lett. 2009, 36, 113–123. [Google Scholar] [CrossRef]
- Asaga, E.; Takemura, K.; Maeno, T.; Ban, A.; Toriumi, M. Tactile evaluation based on human tactile perception mechanism. Sens. Actuators A. Phys. 2013, 203, 69–75. [Google Scholar] [CrossRef]
- Smith, A.M.; Chapman, C.E.; Deslandes, M.; Langlais, J.S.; Thibodeau, M.P. Role of friction and tangential force variation in the subjective scaling of tactile roughness. Exp. Brain Res. 2002, 144, 211–223. [Google Scholar] [CrossRef] [PubMed]
- Olausson, H.; Wessberg, J.; Kakuda, N. Tactile directional sensibility: Peripheral neural mechanisms in man. Brain Res. 2000, 866, 178–187. [Google Scholar] [CrossRef]
- Okamoto, S.; Nagano, H.; Yamada, Y. Psychophysical Dimensions of Tactile Perception of Textures. IEEE Trans. Haptics 2013, 6, 81–93. [Google Scholar] [CrossRef] [PubMed]
- Ochiai, Y.; Hoshi, T.; Rekimoto, J.; Takasaki, M. Diminished haptics: Towards digital transformation of real world textures. In EuroHaptics; Springer: Berlin/Heidelberg, Germany, 2014; pp. 409–417. [Google Scholar]
- Johansson, R.S.; Vallbo, Å.B. Tactile sensory coding in the glabrous skin of the human hand. Trends Neurosci. 1983, 6, 27–32. [Google Scholar] [CrossRef]
- Van Kuilenburg, J.; Masen, M.A.; Van Der Heide, E. A review of fingerpad contact mechanics and friction and how this affects tactile perception. J. Eng. Tribol. 2015, 229, 243–258. [Google Scholar] [CrossRef]
- Kawasegi, N.; Fujii, M.; Shimizu, T.; Sekiguchi, N.; Sumioka, J.; Doi, Y. Physical properties and tactile sensory perception of microtextured molded plastics. Precis. Eng. 2014, 38, 292–299. [Google Scholar] [CrossRef]
- Takahashi, A.; Suzuki, M.; Imai, Y.; Nonomura, Y. Tactile texture and friction of soft sponge surfaces. Colloids Surf. B Biointerfaces 2015, 130, 10–15. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| m | fm,1 (Hz) | fm,2 (Hz) | fm,3 (Hz) |
|---|---|---|---|
| FA I | 0.500 | 12.2 | 67.0 |
| FA II | 20.0 | 241 | 800 |
| SA I | 0.500 | 26.2 | 120 |
| SA II | 0.500 | 91.2 | 400 |
| Evaluate Index | PC1 (Softness) | PC2 (Roughness) | PC3 (Coldness) |
|---|---|---|---|
| Soft | 0.893 | −0.0650 | 0.0141 |
| Hard | −0.873 | 0.0528 | 0.0976 |
| Elastic | 0.853 | −0.0617 | 0.0413 |
| Rough | −0.0600 | 0.874 | −0.0498 |
| Coarse | −0.0711 | 0.824 | −0.0597 |
| Smooth | 0.0419 | −0.791 | 0.106 |
| Cold | −0.0140 | −0.0621 | 0.927 |
| Cool | −0.0199 | −0.127 | 0.918 |
| Eigenvalue | 2.55 | 2.11 | 1.47 |
| Contribution rate (%) | 28.7 | 26.2 | 21.6 |
| Cumulative contribution rate (%) | 28.7 | 54.9 | 76.6 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nobuyama, L.; Kurashina, Y.; Kawauchi, K.; Matsui, K.; Takemura, K. Tactile Estimation of Molded Plastic Plates Based on the Estimated Impulse Responses of Mechanoreceptive Units. Sensors 2018, 18, 1588. https://doi.org/10.3390/s18051588
Nobuyama L, Kurashina Y, Kawauchi K, Matsui K, Takemura K. Tactile Estimation of Molded Plastic Plates Based on the Estimated Impulse Responses of Mechanoreceptive Units. Sensors. 2018; 18(5):1588. https://doi.org/10.3390/s18051588
Chicago/Turabian StyleNobuyama, Lisako, Yuta Kurashina, Kei Kawauchi, Koji Matsui, and Kenjiro Takemura. 2018. "Tactile Estimation of Molded Plastic Plates Based on the Estimated Impulse Responses of Mechanoreceptive Units" Sensors 18, no. 5: 1588. https://doi.org/10.3390/s18051588
APA StyleNobuyama, L., Kurashina, Y., Kawauchi, K., Matsui, K., & Takemura, K. (2018). Tactile Estimation of Molded Plastic Plates Based on the Estimated Impulse Responses of Mechanoreceptive Units. Sensors, 18(5), 1588. https://doi.org/10.3390/s18051588