A New Path-Constrained Rendezvous Planning Approach for Large-Scale Event-Driven Wireless Sensor Networks

 , , ,
, , ,
Abstract
:1. Introduction
- Modeling the problem by a Mixed Integer Linear Programming (MILP).
- Analyzing the theoretical aspects of the problem and proving its NP-hardness.
- Proposing distributed and comprehensive heuristics for constructing a comprehensive framework in our approach.
- The first heuristic determines a suitable set of RPs. To cope with the uncertainties in the environment, we designed a Fuzzy Decision System (FDS) model for identifying the potentiality of a sensor-node for becoming a RP.
- After selecting the RPs, our second heuristic attempts to find appropriate locations for the mobile-sink to stop and collect the data from the sensor-nodes which are called “sojourn locations”.
- And the third heuristic constructs routing trees for the sensor-nodes which cannot contact with the mobile-sink directly. These sensor-nodes transfer their data to the related RP.
- Our experimental results prove the effectiveness of our approach.
2. Related Work
3. Preliminaries
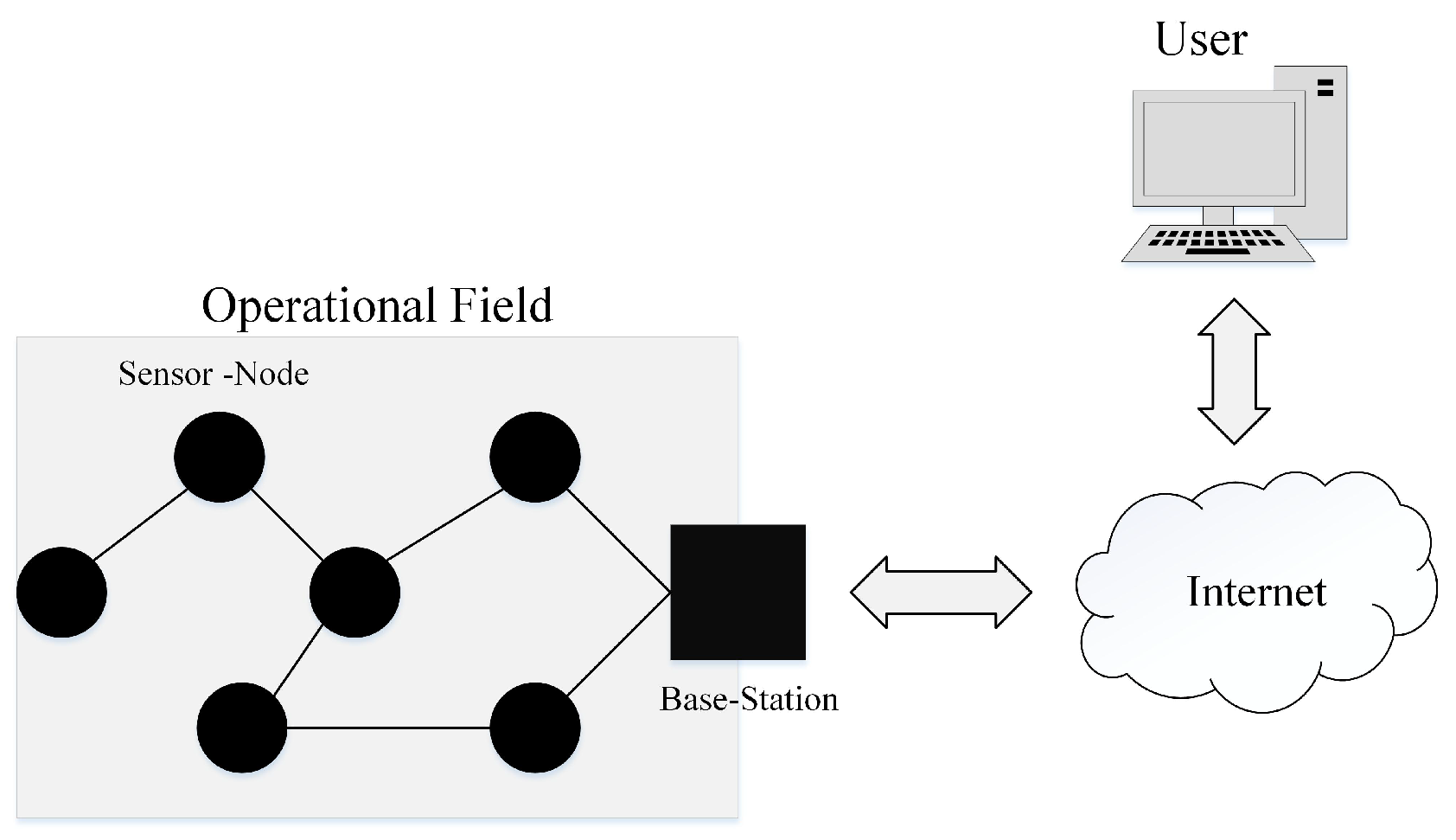
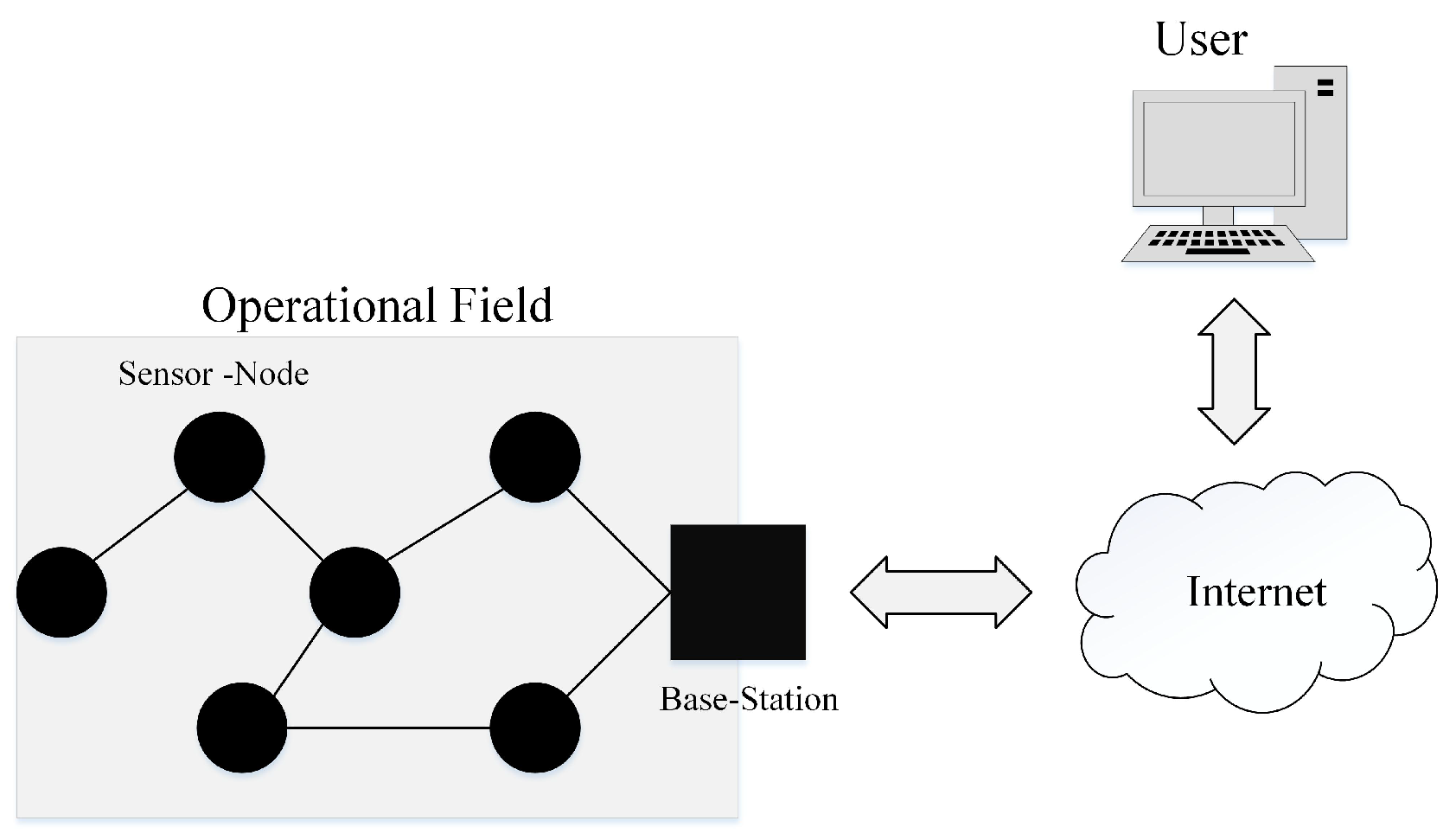
3.1. Network Model
- A target field without limitation based on geographical differences.
- One mobile-sink in the network.
- The sensor-nodes have enough computational capabilities and are able to run our proposed solution.
- Each sensor-node has a unique ID which is known for the mobile-sink and the base-station.
- The sensor-nodes and the base-station are stationary after installation in the target field.
- The network is homogenous that means all of the sensor-nodes are in the same type. And in the beginning of network’s operation, they have the same amount of initial energy.
- We assume that the conditions of MAC layer are ideal and communication links between sensor-nodes can establish or cannot. In case of establishment, the sensor-nodes can contact with each other with high quality (based on the standards for wireless communication) (This is an ideal assumption which might not be practical in real wireless communication fashion. The reason for this assumption is to facilitate our simulation. Generally, if two sensor-nodes or a sensor-node with the mobile-sink cannot contact with each other based on the expected quality, they will not be considered in the communication range of each other).
- The sensor-nodes and the mobile-sink are able to control their transmission power to the desired destination (This assumption is arguable in practical implementations. However, the correctness of our assumption just implies that the sensor-nodes can conserve their energy by adjusting their transmission power and operate longer in the network. Our proposed approach does not rely on this assumption).
- The sensor-nodes and the mobile-sink are able to calculate the distance from the received signal strength (Some scholars might doubt on the possibility of this assumption. Indeed, our approach does not need the accurate distance between the sensor-nodes. It is just important to recognize the neighbor sensor-nodes, correctly).
- The radio link is symmetric which means energy consumption for data transmission from node A to node B is same as from node B to node A (This assumption is ideal. We relied on this assumption because of facilitating our simulation).
- We neglect communication time between the sensor-nodes.
3.2. Energy Model
4. Problem Statement and Formulation
4.1. Problem Definition
4.2. MILP Formulation
4.2.1. Objective
4.2.2. Constraints
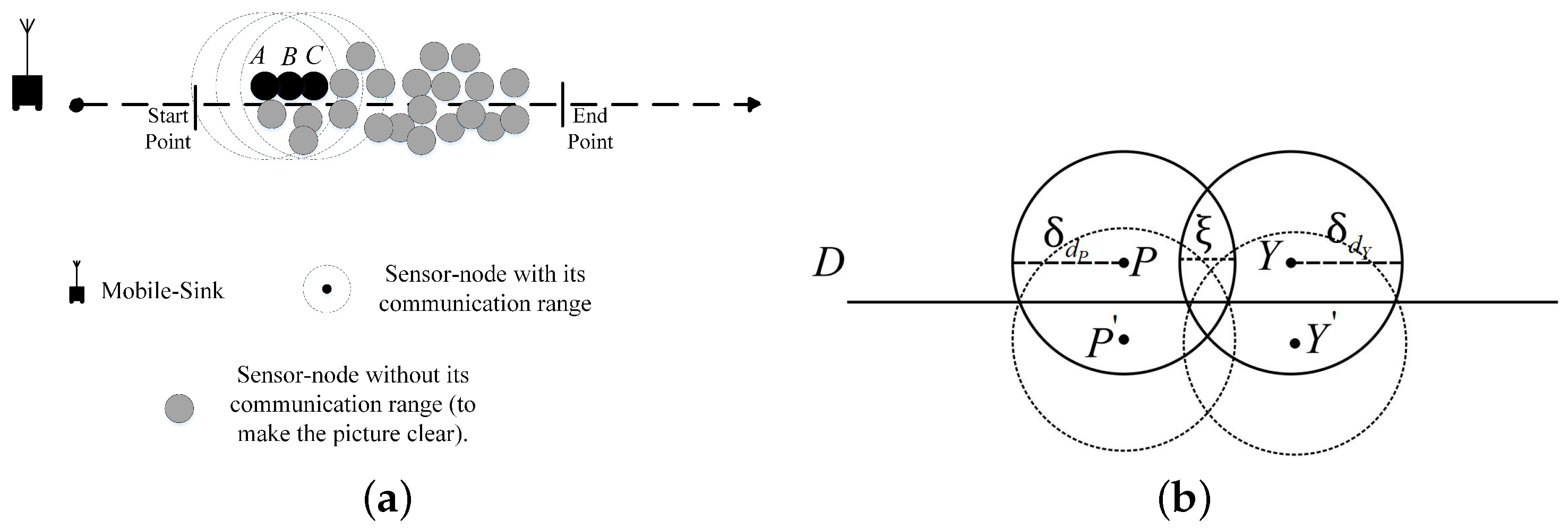
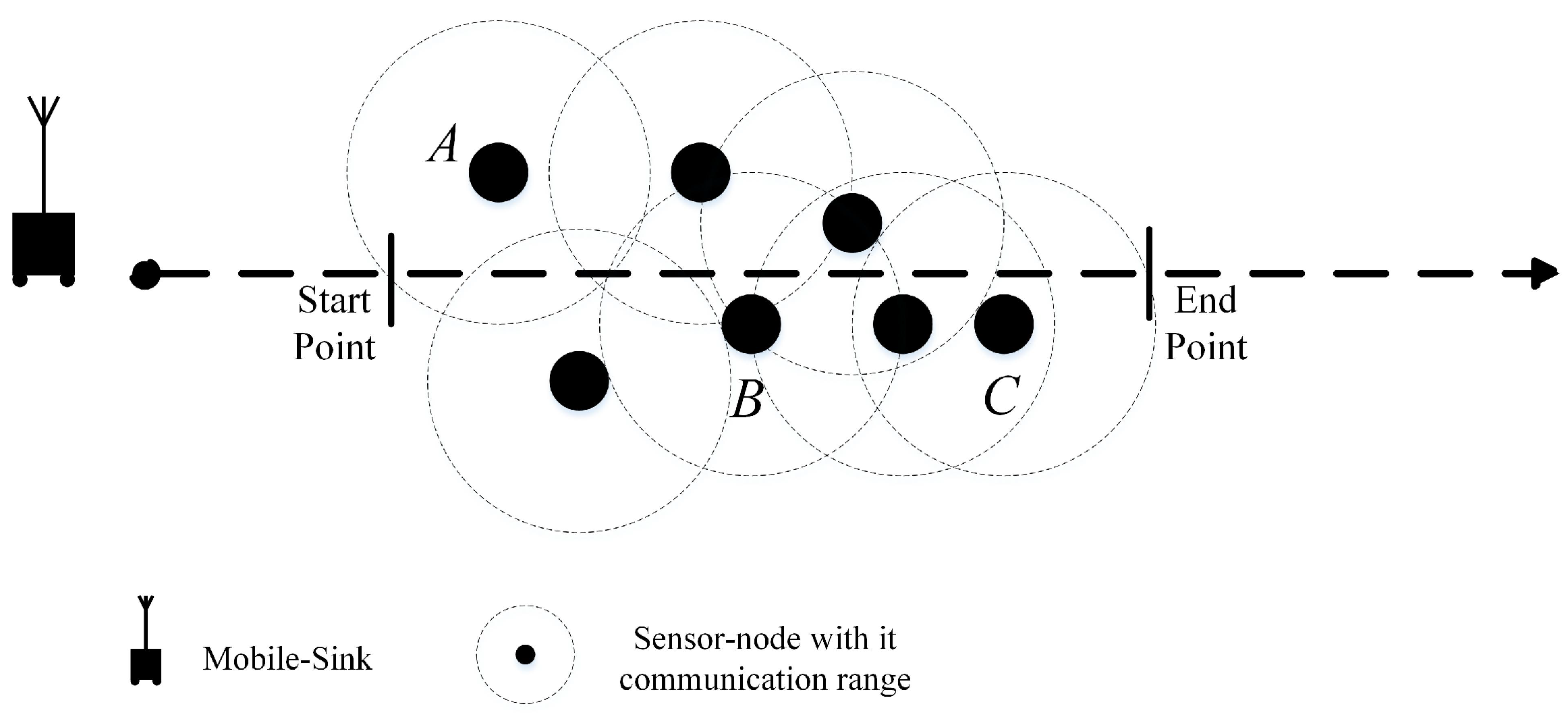
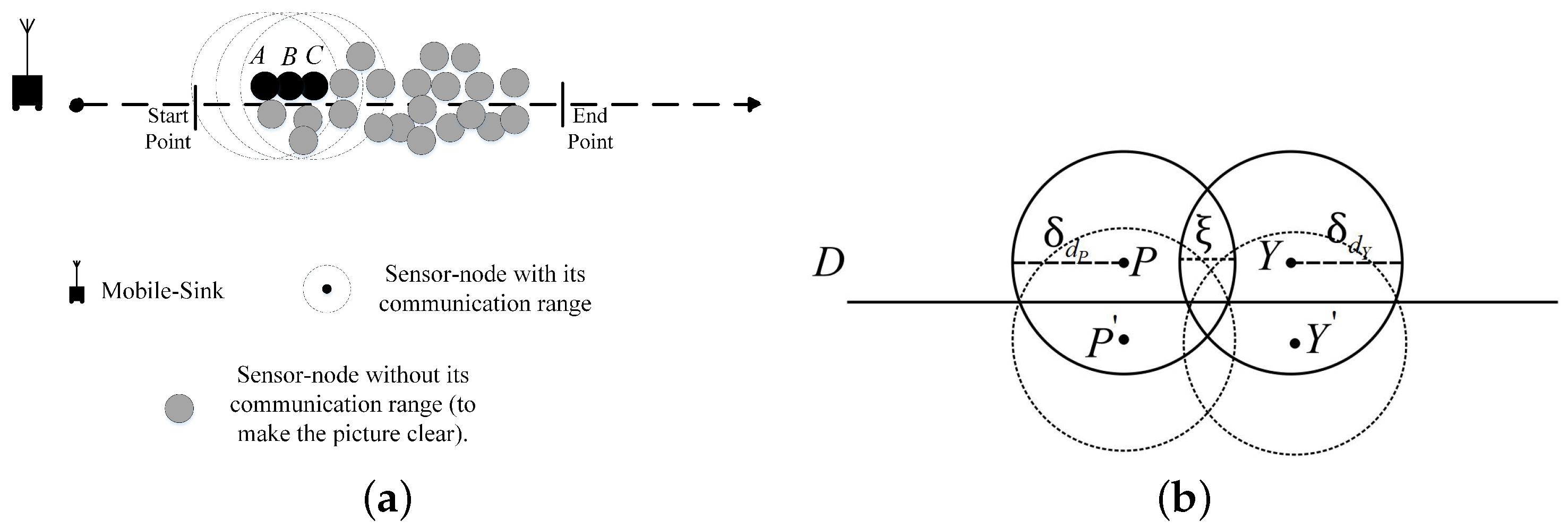
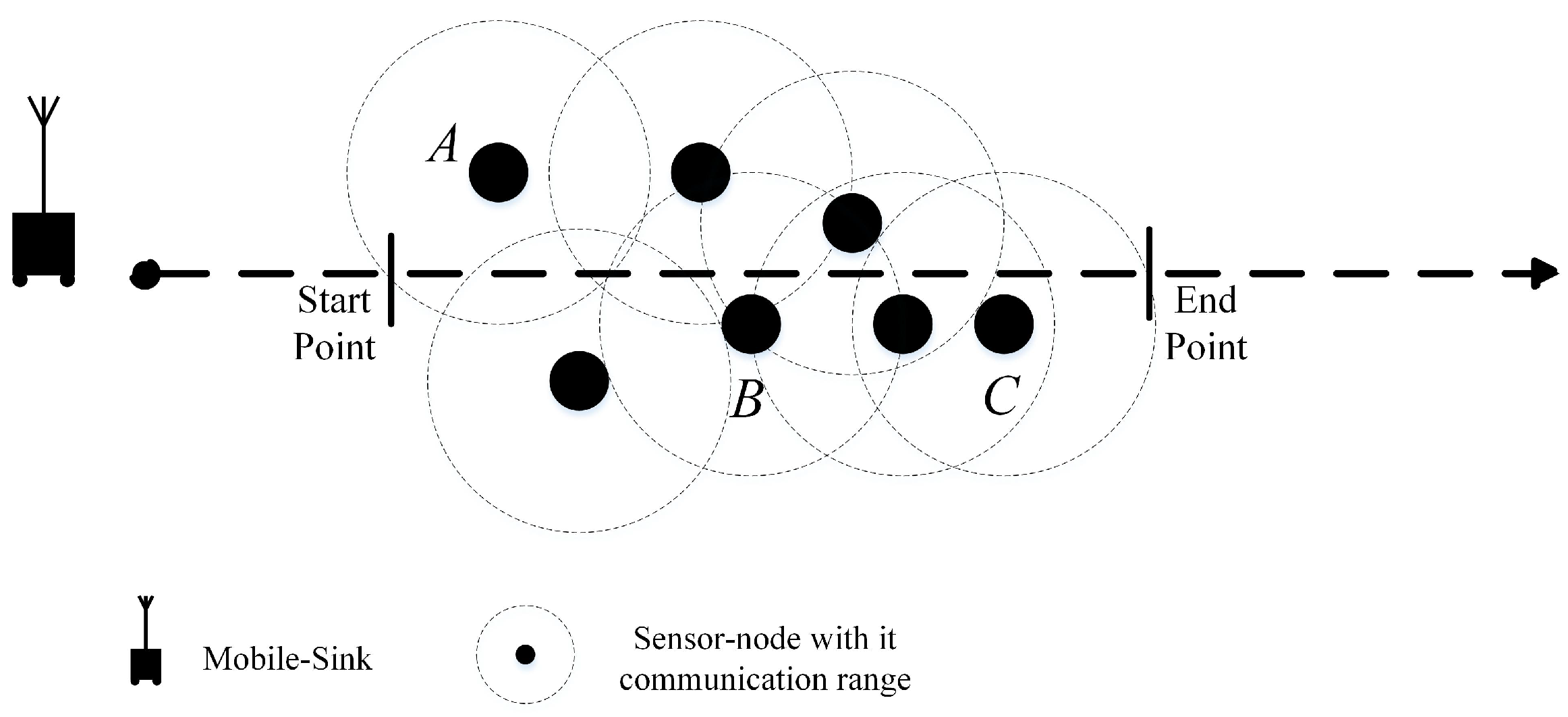
- The maximum number of RPs on the trajectory should not exceed .(Note) The method for calculating the maximum number of RPs:Since the trajectory of the mobile-sink is pre-defined to obtain the maximum number of RPs, we assume in an ideal case that all of the RPs are located beside the trajectory with dense distribution as illustrated in Figure 3a in which, as an example, the sensor-nodes A, B and C are in the communication range of each other and all of them can contact with the mobile-sink directly. However, among these three sensor-nodes one of them should contact with the mobile-sink as RP and other two sensor-nodes should transfer their data to the selected RP. Otherwise, the mobile-sink should collect the data from all of RPs in the periphery of the trajectory that consumes a considerable amount of time in every tour. Thus, the maximum number of RPs can be obtained as follows.such that and are two consecutive sensor-nodes as depicted in Figure 3b,In Equation (10), D represents the total distance of the trajectory. By assuming dense distribution of the sensor-nodes in the periphery of the trajectory, the maximum number of RPs can be obtained by dividing the total distance D to the summation of communication diameter of the two consecutive sensor-nodes with subtracting from the intersected line that is represented by . The obtained value should be multiplied by 2 because in this part of the trajectory two RPs should be selected. And by considering the symmetry condition in another side of the trajectory, the obtained value should be multiplied by 2. The value of is user-defined. Obviously, due to assuming dense distribution of the sensor-nodes in the whole trajectory, we need to consider two arbitrary consecutive sensor-nodes and the obtained value will be same for rest of the sensor-nodes.
- To optimize energy-consumption in communication between sensor-nodes, the solution should not contain energy-triangles. For example, if sensor-node A can contact with sensor-node C directly, then sensor- node B cannot play hop-role between them because . The following expressions illustrate the constraint formally., and :
- The selected RP should be in communication range of the sojourn location.and :
- Each sensor-node should send its data to only one RP for preventing data redundancy and extra energy-consumption in the network.and :
- Balanced assignment of the sensor-nodes to RPs as much as possible to prevent hot-spot phenomenon.and :and due to the distributed nature of our approach, we assume that the following assumption in Equation (21) always happens.then the following constraints ensure balanced energy-consumption.
4.3. Limitation of MILP-Based Approach
- Identifying a finite set of sojourn locations from a continuous trajectory. Thus, there should be a function or methodology to do this procedure.
- And finally assigning the rest of sensor-nodes to the related RPs as illustrated in Expression (6).
5. Proposed Heuristic
5.1. Stage I and II: Determining Sojourn Locations and RPs
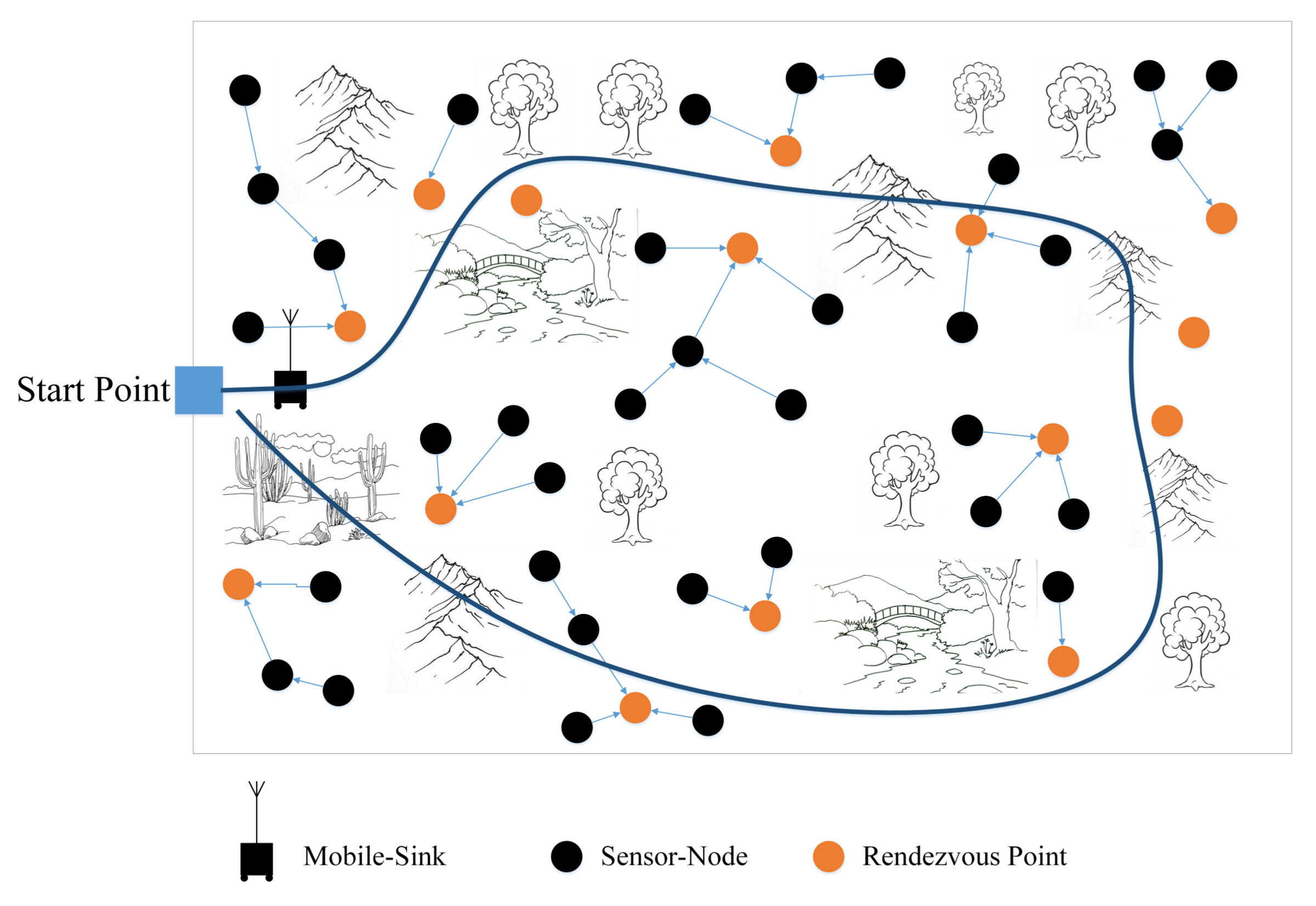
- The mobile-sink moves in the trajectory at the first tour for introducing itself to the periphery sensor-nodes and when a sensor-node receives introduction message, it will consider itself as the candidate RP. The mobile-sink moves in the trajectory and broadcasts the introduction message. Therefore, in this stage the mobile-sink does not wait for reply message and by moving in the trajectory without stopping can accomplish this task.
- The candidate RP starts to do the process of identifying its potentiality for becoming RP based on our designed Fuzzy Decision System (FDS) which is being described with details in Section 5.1.1.
- The voting procedure will be started after the previous step to choose the most suitable sensor-nodes as RPs.
- The mobile-sink determines its sojourn locations based on the selected RPs.
- The rest of sensor-nodes will be assigned to the appropriate RPs based on our designed methodology for constructing balanced routing trees as explained in Section 5.2.
- After identifying the sojourn locations, the mobile-sink stops in each sojourn location to harvest data from the RPs which are being assigned to that specific sojourn location. Since the sensor-nodes are event-driven and their data includes information about an (some) event(s), the mobile-sink should harvest all of the buffered data from the RPs. To determine the waiting-time, the mobile-sink broadcasts a message by arriving to a sojourn location to inform the RPs about its arrival. Then RPs reply a message which includes the amount of their buffered data. And finally based on the channel capacity, the mobile-sink can calculate the required waiting-time. It should be mentioned that if during the waiting-time a RP receives new data, it informs the mobile-sink to extend the waiting-time.
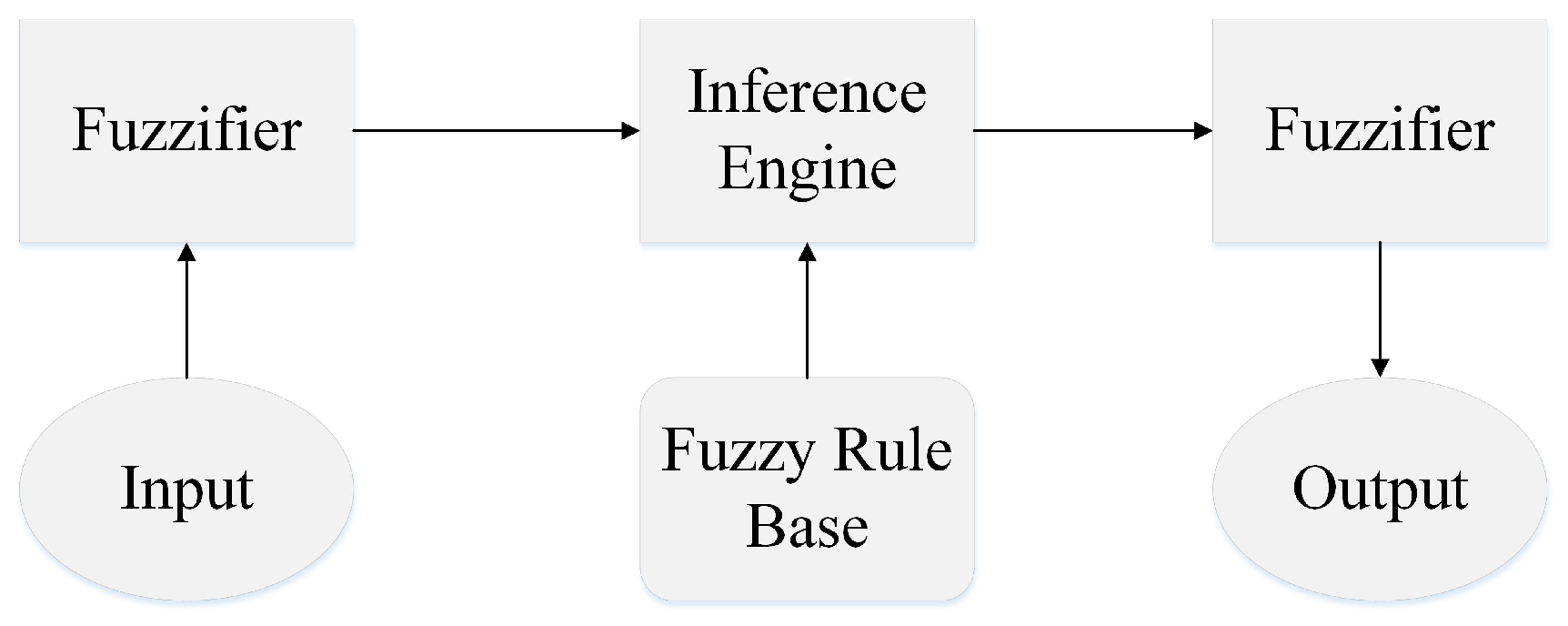
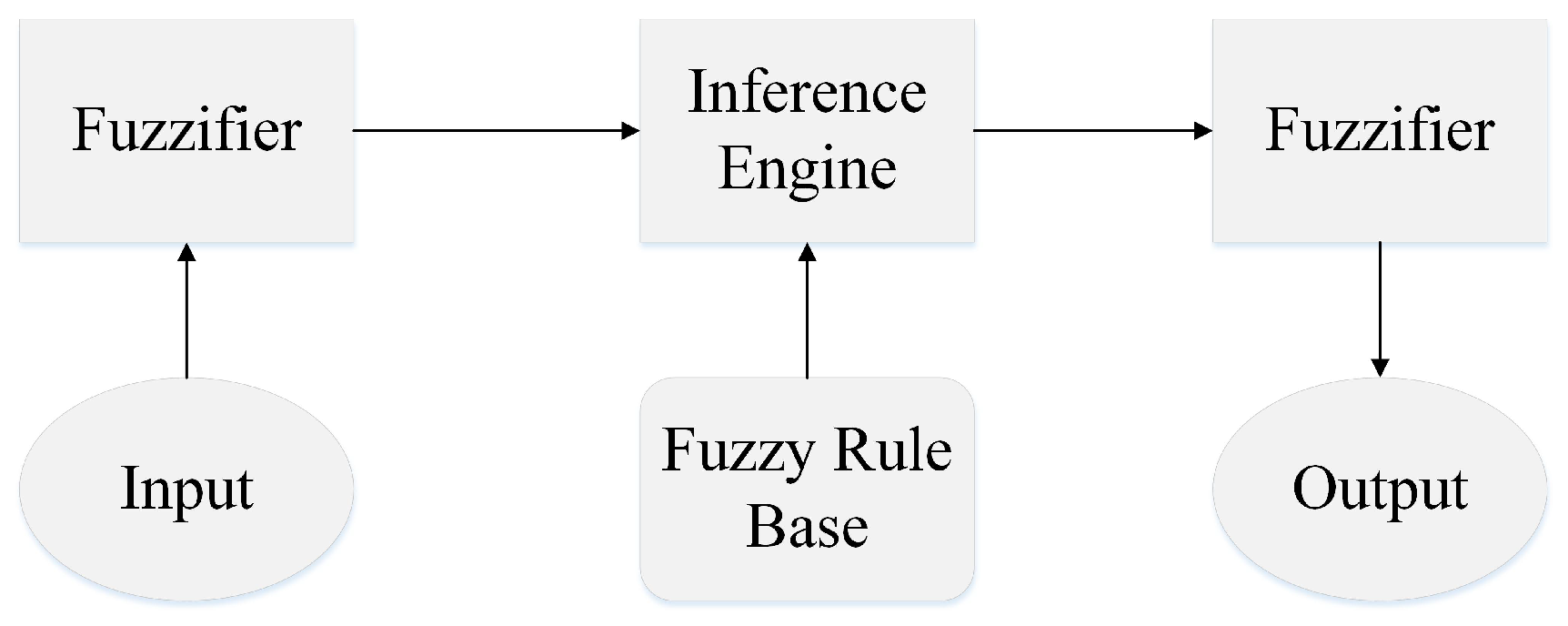
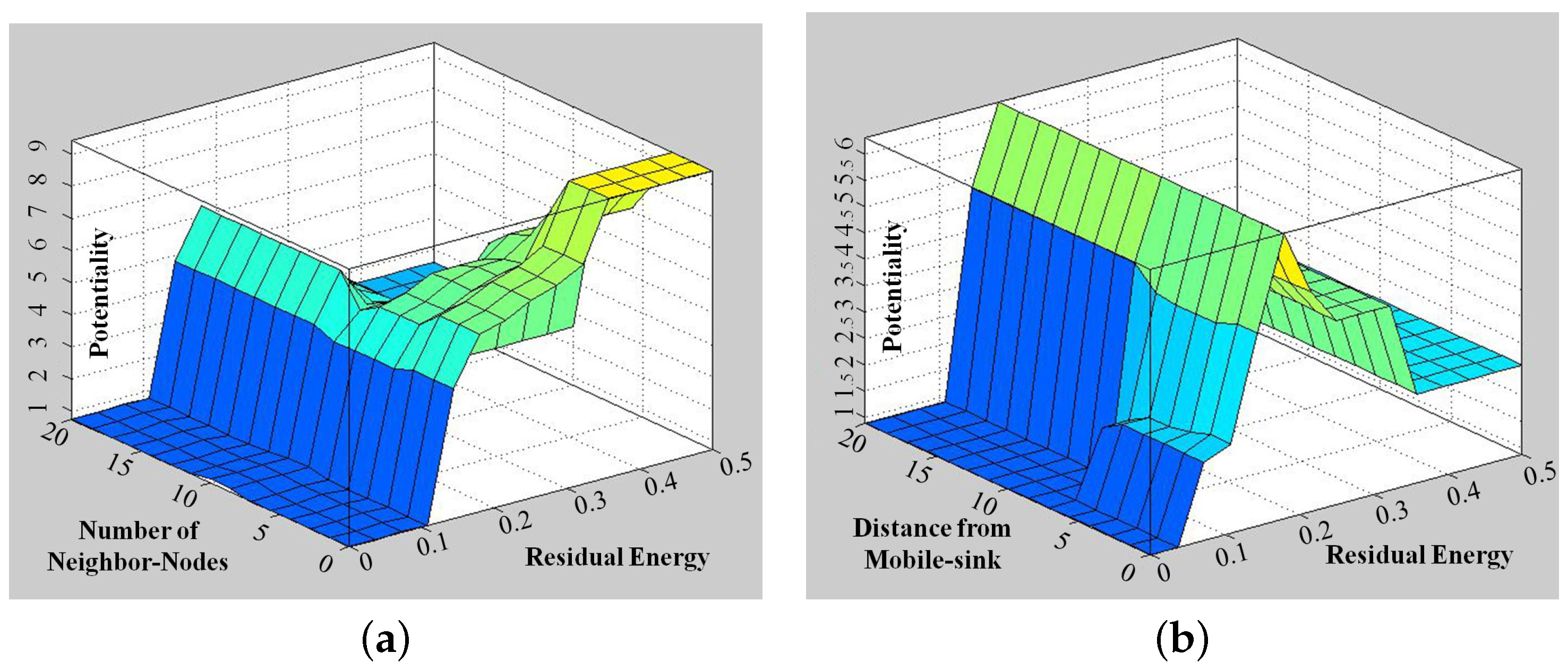
5.1.1. Fuzzy Decision System
- Residual energy is the main factor for a sensor-node to be selected as RP. We designed the following linguistic variables to describe the amount of remaining energy for a sensor-node; very high, high, medium, low, and very low. Figure 5a illustrates the membership functions to map the crisp values of residual energy to the related linguistic values. The membership functions for the linguistic variables high, and very low are trapezoidal and triangular for the rest of linguistic variables.
- Number of neighbor-nodes is another factor that determines the popularity of a sensor-node in case of being selected as RP. In this factor, we just consider the sensor-nodes that can contact with the candidate-node directly. Therefore, a sensor-node with highest number of neighbor-nodes is more desirable. We defined three linguistic variables to describe the number of neighbor-nodes which are high, medium, and low. In Figure 5a, the membership functions for high and low are trapezoidal and for medium triangular.
- Distance from Mobile-Sink is the third factor in our designated Fuzzy inference system that is for obtaining the required energy for the sensor-node to contact with the mobile-sink in case of being selected as RP. Clearly, when a sensor-node is closer to the sojourn location, it can conserve its residual energy and extend the lifetime of the network. In the Fuzzy inference system, as shown in Figure 5b there are three linguistic variables to describe the distance from mobile-sink; high, medium, and low. The membership functions for high and low are trapezoidal and for medium the membership function is triangular.
5.1.2. RP-Selection
5.1.3. Sojourn Locations Selection
| Algorithm 1: RP-Node Selection |
| Input: i) Candidate RPs, , ; ii) Neighbor-Nodes, , and ; Output: i) RP-Nodes, , ; ii) The first group of sensor-nodes which follow the RPs, ; 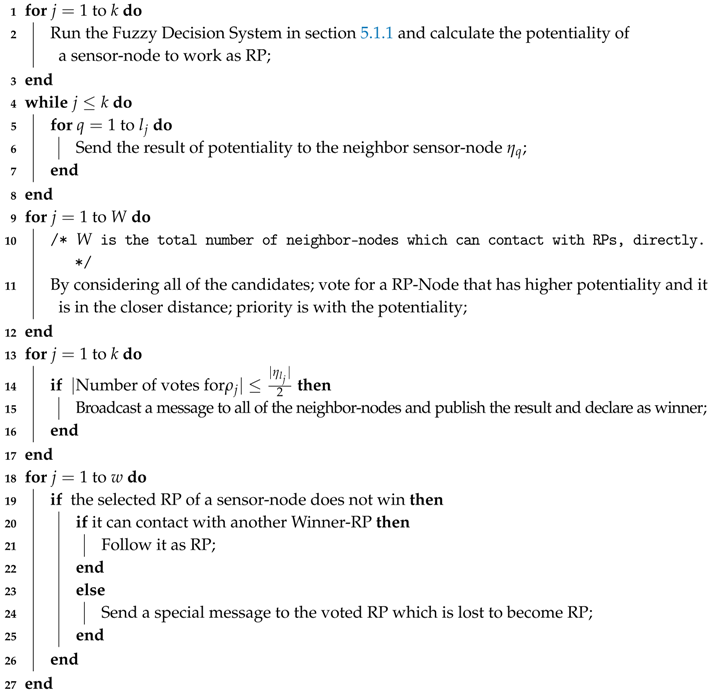 |
- If there is only one RP in the periphery of the trajectory and this RP cannot contact with other RPs, then the mobile-sink considers the closest distance to the RP as sojourn location.
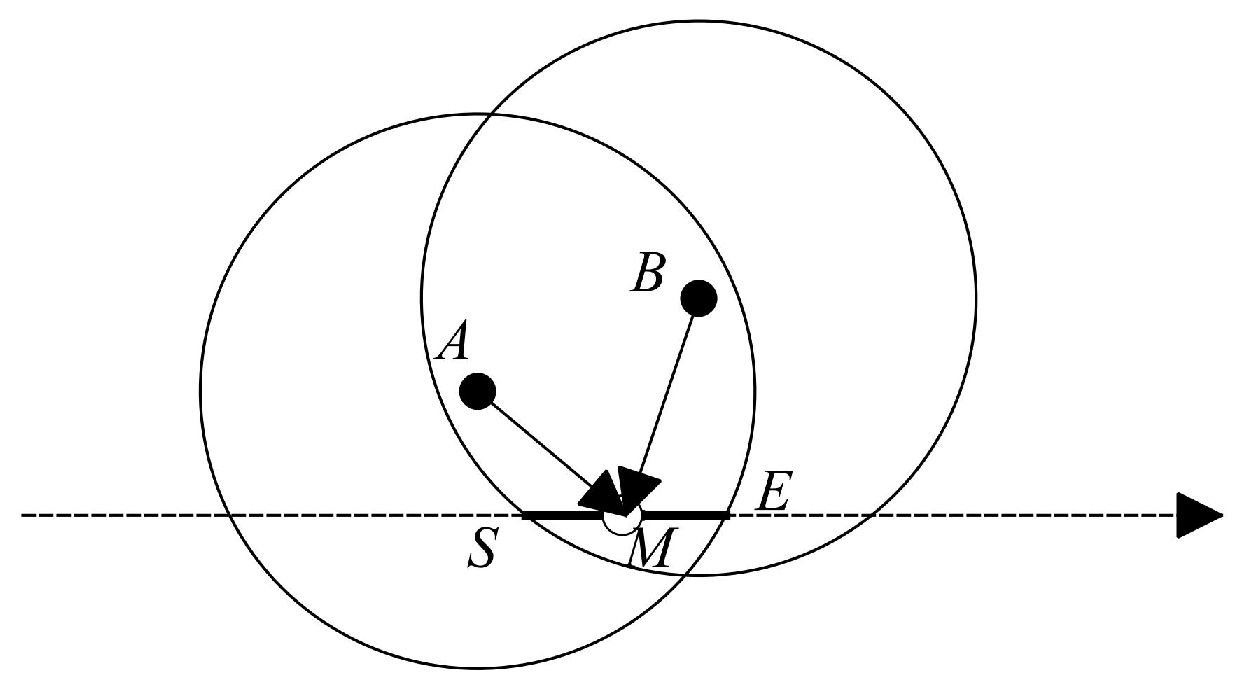
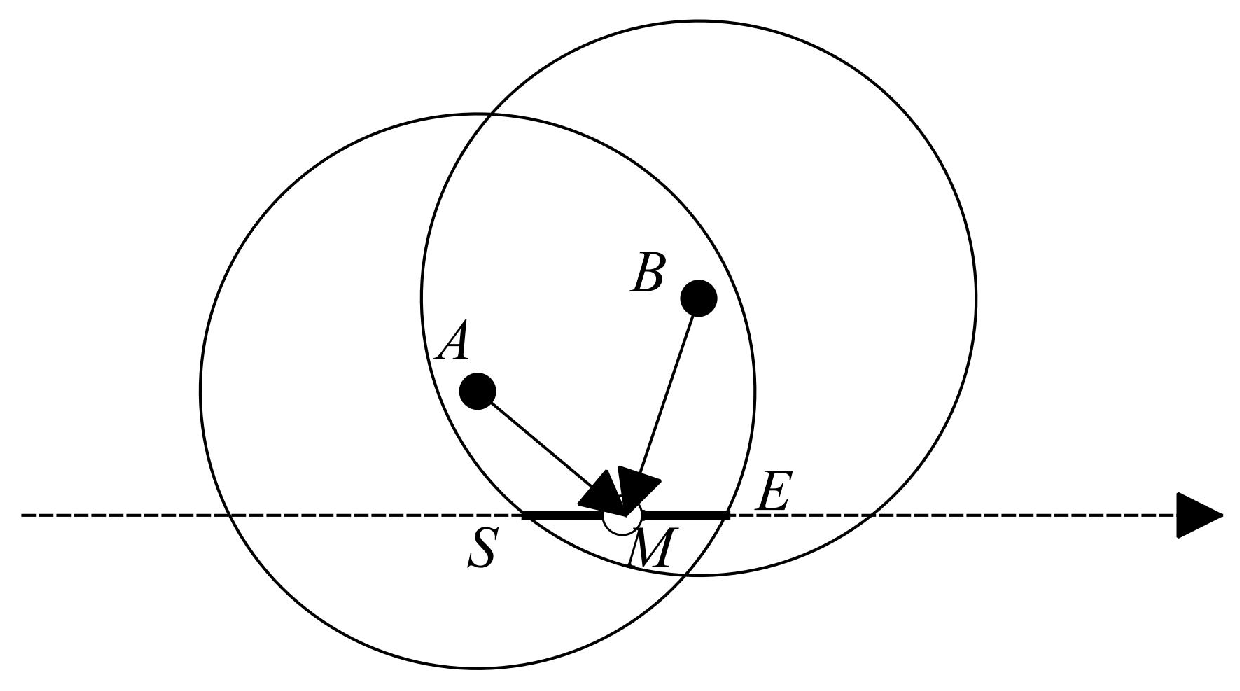
- If there are two RPs which are in the communication range of each other, as shown in Figure 6, we should balance energy consumption among the RPs for data communication. To illustrate our solution, we follow the example in Figure 6 in which there are two RPs A and B. The line specifies the intersected trajectory that the sojourn location should be selected for covering the two RPs. To obtain the position that can balance energy consumption, we select the middle of which is identified as M. By comparing with the point M moves to the direction that has larger amount of energy consumption in the line . If then we can obtain the optimal solution. And if in we cannot obtain the optimal solution but obviously we can achieve to the most possible near optimal solution.
- For the condition that there are more than two RPs in the periphery of the trajectory, we proposed Algorithm 2 that is described with details in the following.
| Algorithm 2: Determining Sojourn Locations |
| Input: i) RP-Nodes, , ; ii) The trajectory of the mobile-sink, , ; Output: i) Sojourn locations, , ; 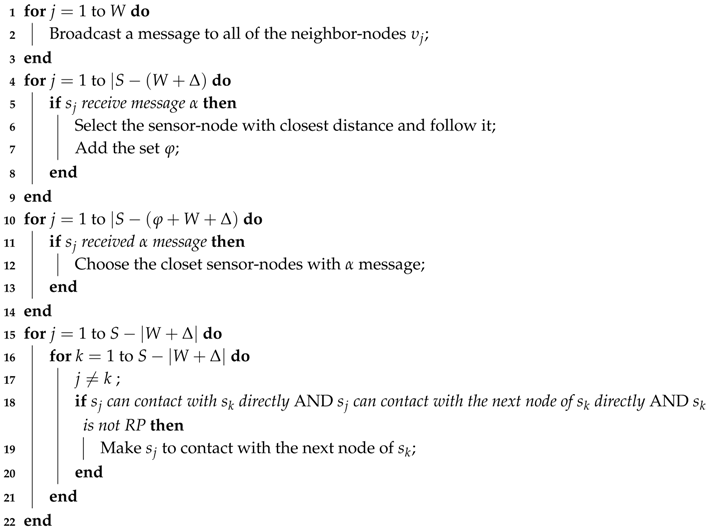 |
5.2. Stage III: Constructing the Routing Tree
| Algorithm 3: Constructing Balanced Routing Tree |
| Input: i) The set of all the sensor-nodes that can contact with RPs, directly, ; Output: i) Routing Tree for each RP; 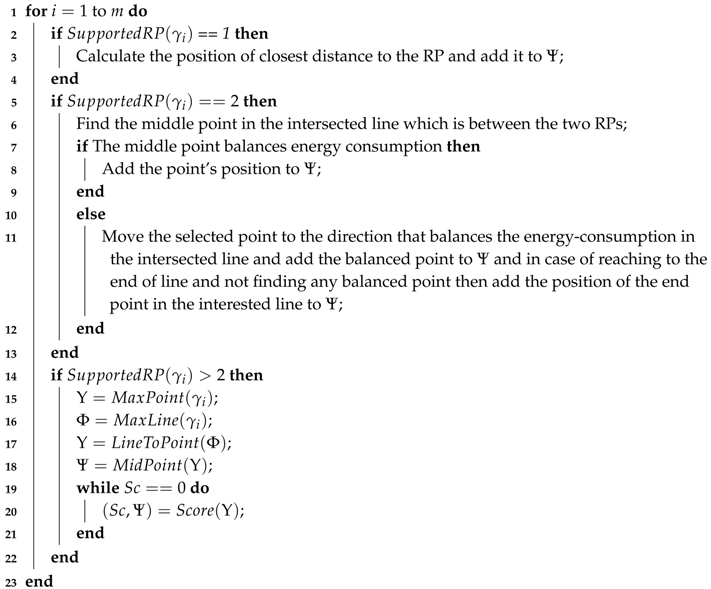 |
6. Numerical Results
6.1. Parameter Settings
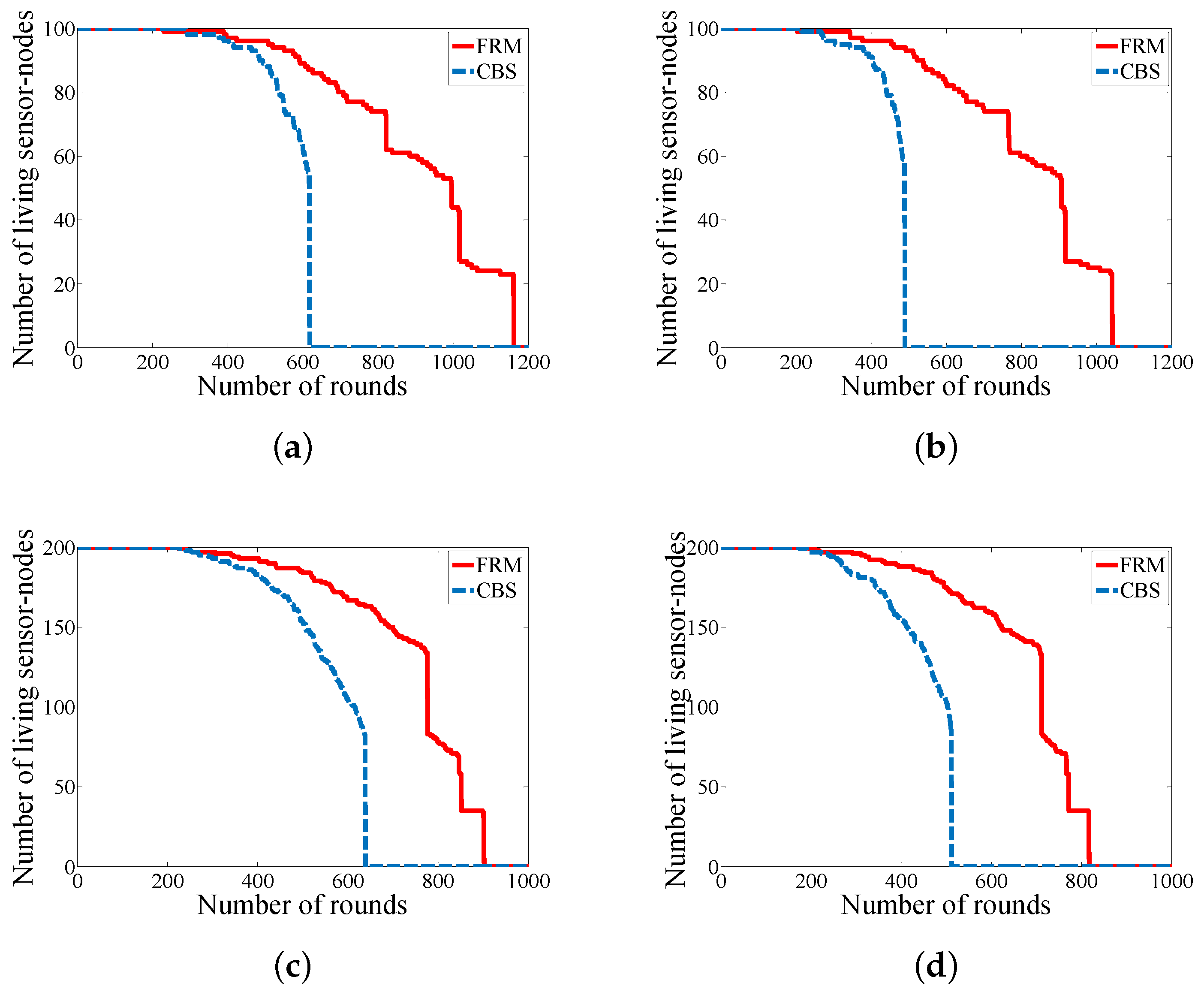
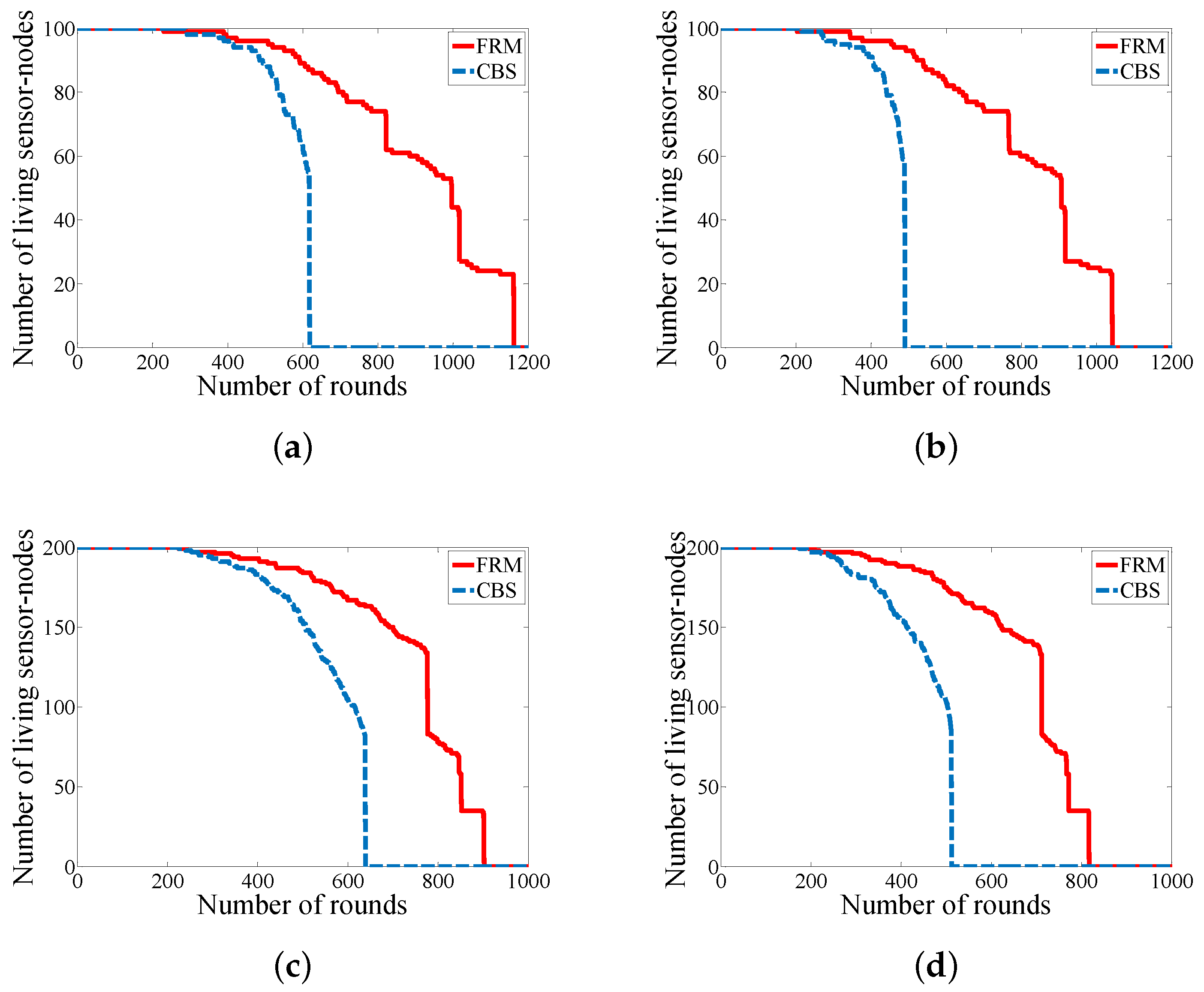
6.2. Network Life-Cycle
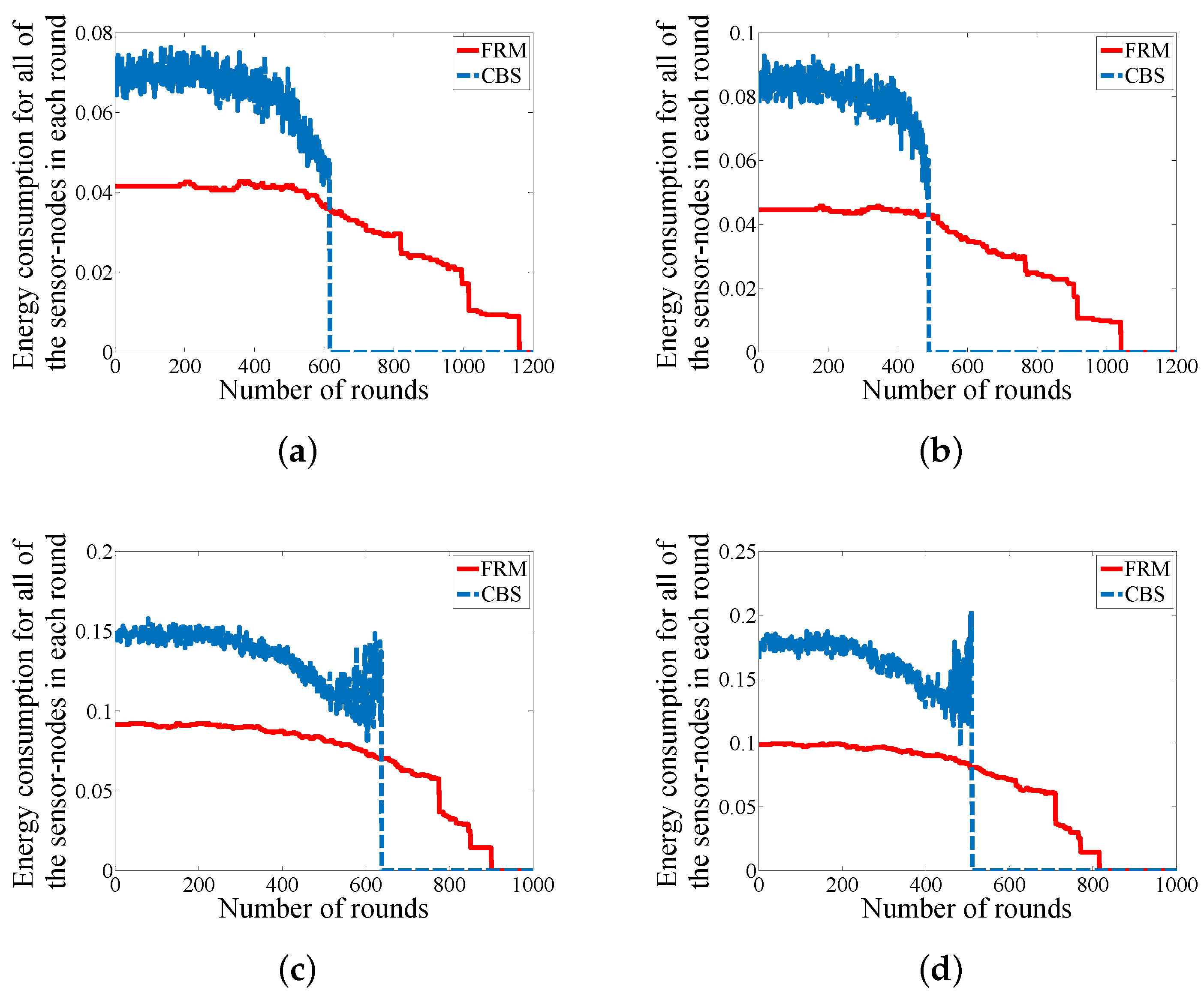
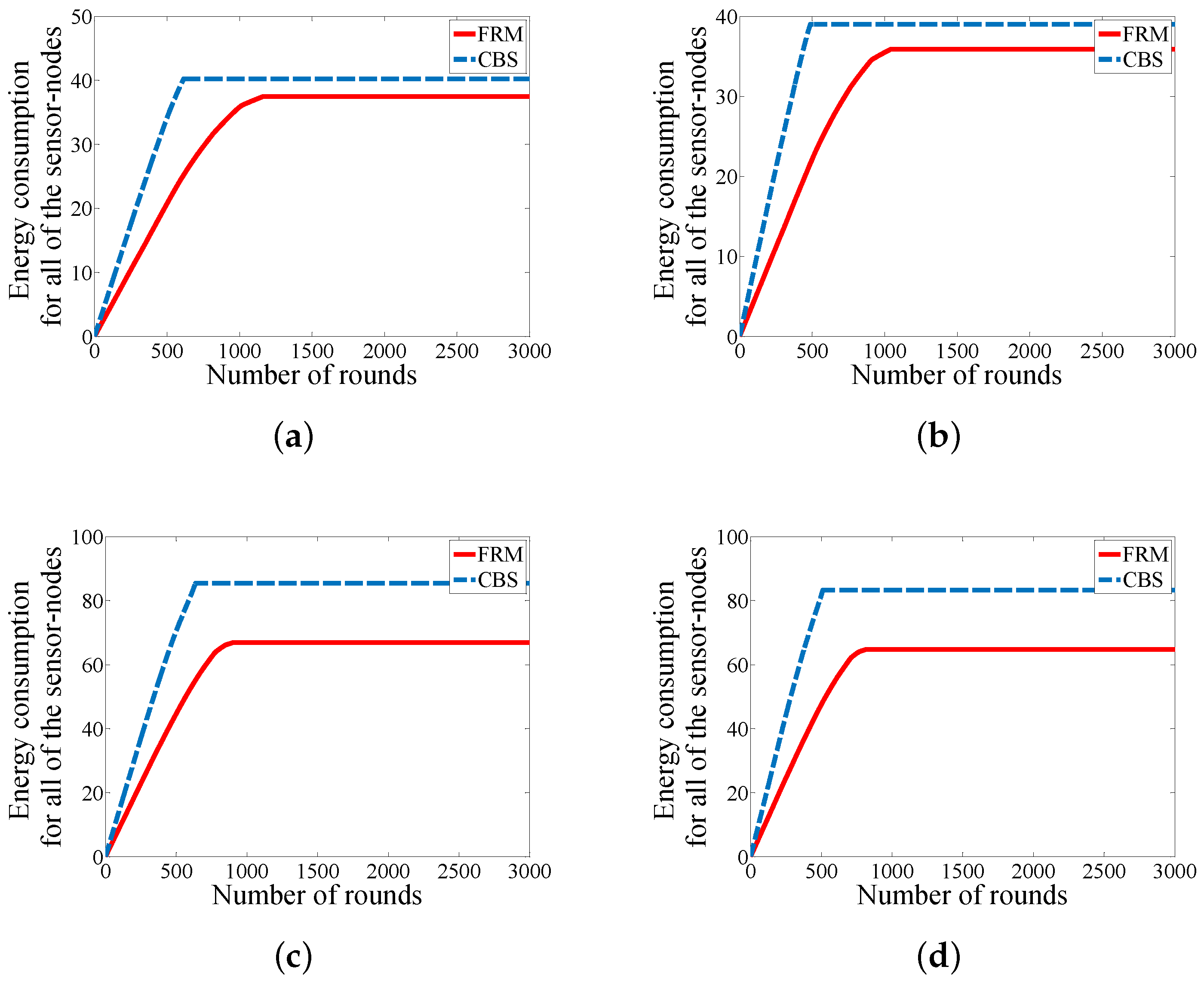
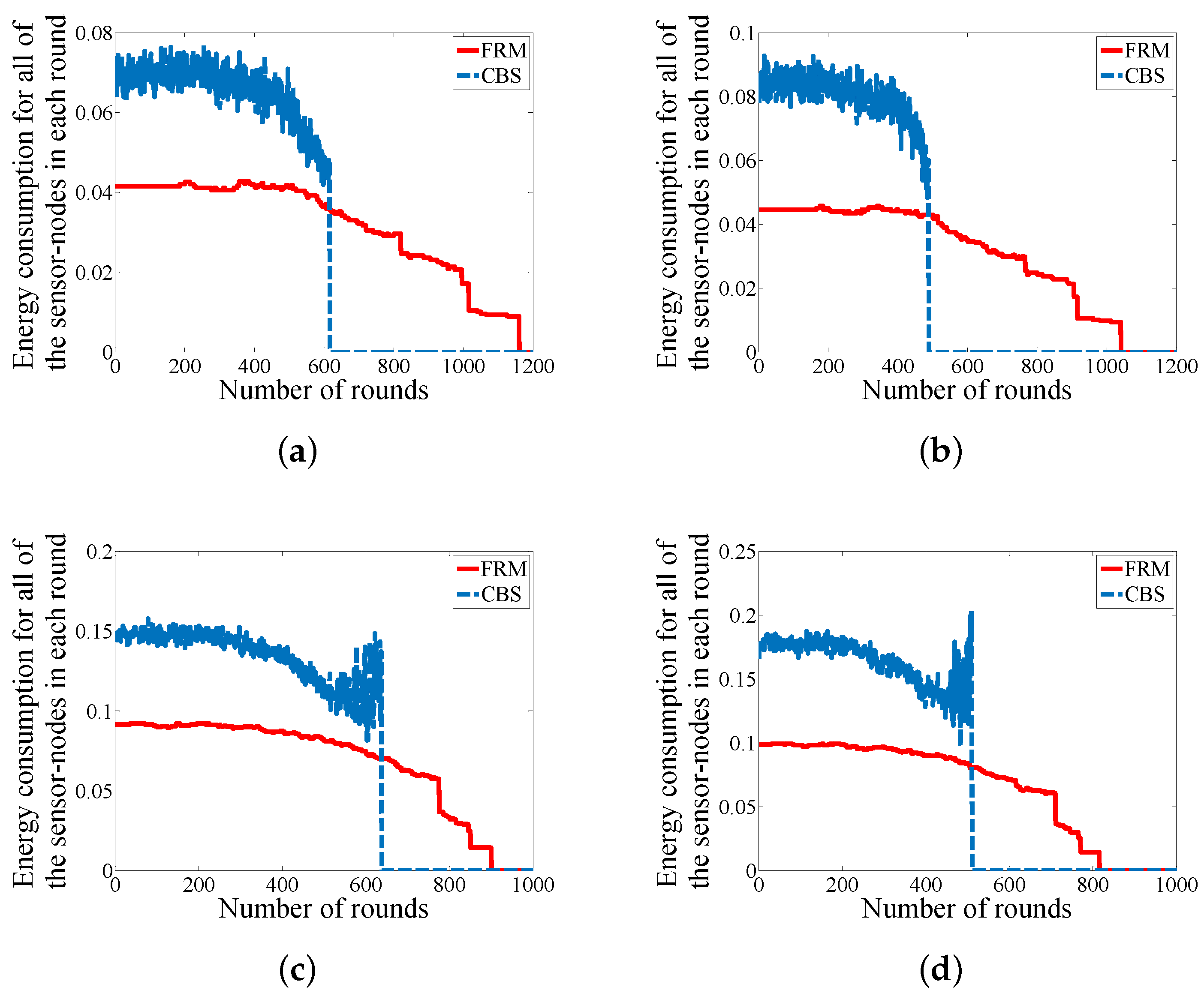
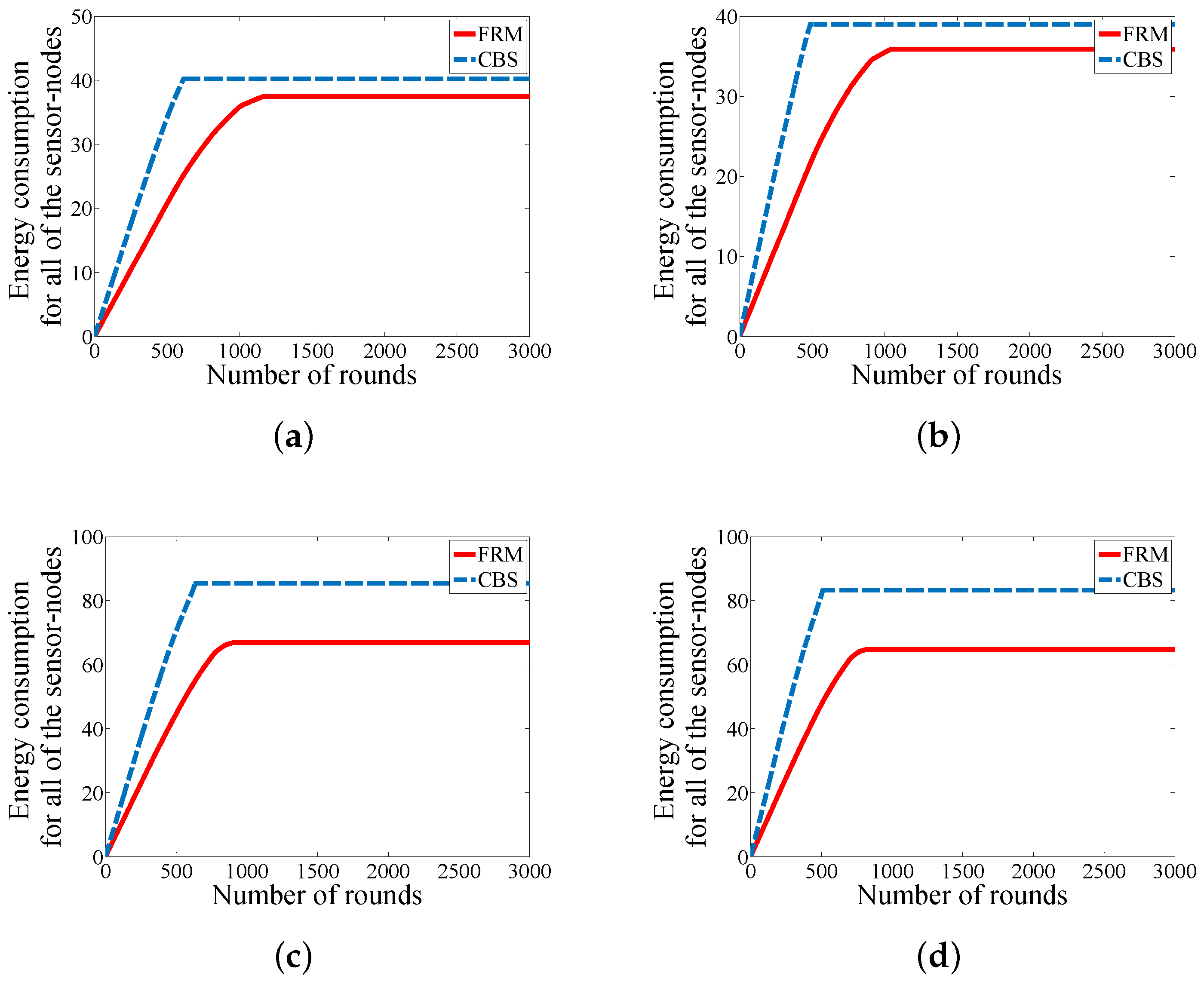
6.3. Energy Consumption
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Rashid, B.; Rehmani, M.H. Applications of wireless sensor networks for urban areas: A survey. J. Netw. Comput. Appl. 2015, 60, 192–219. [Google Scholar] [CrossRef]
- Noel, A.; Abdaoui, A.; Badawy, A.; Elfouly, T.; Ahmed, M.; Shehata, M. Structural health monitoring using wireless sensor networks: A comprehensive survey. IEEE Commun. Surv. Tutor. 2017, 19, 1403–1423. [Google Scholar] [CrossRef]
- Xu, L.; Collier, R.; O’Hare, G.M.P. A survey of clustering techniques in WSNs and consideration of the challenges of applying such to 5G IoT scenarios. IEEE Internet Things J. 2017, 4, 1229–1249. [Google Scholar] [CrossRef]
- Ashton, K. In the real world, things matter more than ideas. RFID J. 2009. Available online: http://www.rfidjournal.com/articles/view?4986 (accessed on 4 May 2018).
- Shu, Y.; Lee, K.; Lanctot, P.; Fan, J.; Hao, H.; Chow, B.; Desbenoit, J.-P.; Stephan, G.; Hui, L.; Xue, G.; et al. Internet of Things: Wireless Sensor Networks. Available online: http://www.iec.ch/whitepaper/internetofthings/ (accessed on 4 May 2018).
- Zhou, Z.; Du, C.; Shu, L.; Hancke, G.; Niu, J.; Ning, H. An energy-balanced heuristic for mobile sink scheduling in hybrid WSNs. IEEE Trans. Ind. Inform. 2016, 12, 28–40. [Google Scholar] [CrossRef]
- Lian, J.; Naik, K.; Agnew, G.B. Data capacity improvement of wireless sensor networks using non-uniform sensor distribution. Int. J. Distrib. Sens. Netw. 2006, 2, 121–145. [Google Scholar] [CrossRef]
- Basagni, S.; Carosi, A.; Melachrinoudis, E.; Petrioli, C.; Wang, Z.M. Controlled sink mobility for prolonging wireless sensor networks lifetime. Wirel. Netw. 2008, 14, 831–858. [Google Scholar] [CrossRef]
- Salarian, H.; Chin, K.W.; Naghdy, F. An energy-efficient mobile-sink path selection strategy for wireless sensor networks. IEEE Trans. Veh. Technol. 2014, 63, 2407–2419. [Google Scholar] [CrossRef]
- Zhu, C.; Wu, S.; Han, G.; Shu, L.; Wu, H. A tree-cluster-based data-gathering algorithm for industrial WSNs with a mobile sink. IEEE Access 2015, 3, 381–396. [Google Scholar] [CrossRef]
- Tang, J.; Yang, W.; Zhu, L.; Wang, D.; Feng, X. An adaptive clustering approach based on minimum travel route planning for wireless sensor networks with a mobile sink. Sensors 2017, 17, 964. [Google Scholar] [CrossRef] [PubMed]
- Zheng, H.; Li, J.; Feng, X.; Guo, W.; Chen, Z.; Xiong, N. Spatial-temporal data collection with compressive sensing in mobile sensor networks. Sensors 2017, 17, 2575. [Google Scholar] [CrossRef] [PubMed]
- Wu, C.; Wu, W.; Wan, C.; Bekkering, E.; Xiong, N. Design and analysis of a data fusion scheme in mobile wireless sensor networks based on multi-protocol mobile agents. Sensors 2017, 17, 2523. [Google Scholar] [CrossRef] [PubMed]
- Kawai, S.; Asaka, T. Event-driven wireless sensor networks using energy-saving data collection. In Proceedings of the 18th Asia-Pacific Conference on Communications (APCC), Jeju Island, Korea, 15–17 October 2012; pp. 300–305. [Google Scholar]
- Cai, J.; Song, X.; Wang, J.; Gu, M. Reliability analysis for a data flow in event-driven wireless sensor networks. Wirel. Pers. Commun. 2014, 78, 151–169. [Google Scholar] [CrossRef]
- Abbasi, A.; Younis, M. A survey on clustering algorithms for wireless sensor networks. Comput. Commun. 2007, 30, 2826–2841. [Google Scholar] [CrossRef]
- Heinzelman, W.B.; Chandrakasan, A.P.; Balakrishnan, H. An application-specific protocol architecture for wireless microsensor networks. IEEE Trans. Wirel. Commun. 2002, 1, 660–670. [Google Scholar] [CrossRef]
- Heinzelman, W.R.; Chandrakasan, A.; Balakrishnan, H. Energy-efficient communication protocol for wireless microsensor networks. In Proceedings of the 33rd Hawaii International Conference on System Sciences, Washington, DC, USA, 7 January 2000; Volume 8, pp. 1–10. [Google Scholar]
- Voulkidis, A.C.; Cottis, P.G. Optimal node allocation in multiservice WSNs based on correlated strategy. IEEE Trans. Wirel. Commun. 2016, 15, 4196–4205. [Google Scholar] [CrossRef]
- Rehan, W.; Fischer, S.; Rehan, M.; Rehmani, M.H. A comprehensive survey on multichannel routing in wireless sensor networks. J. Netw. Comput. Appl. 2017, 95, 1–25. [Google Scholar] [CrossRef]
- Zhang, X.Y.; Zhang, J.; Gong, Y.J.; Zhan, Z.H.; Chen, W.N.; Li, Y. Munkres parallel genetic algorithm for the set cover problem and its application to large-scale wireless sensor networks. IEEE Trans. Evol. Comput. 2016, 20, 695–710. [Google Scholar] [CrossRef]
- Saleem, M.; Ullah, I.; Farooq, M. BeeSensor: An energy-efficient and scalable routing protocol for wireless sensor networks. Inf. Sci. 2012, 200, 38–56. [Google Scholar] [CrossRef]
- Singh Mann, P.; Singh, S. Energy efficient clustering protocol based on improved metaheuristic in wireless sensor networks. J. Netw. Comput. Appl. 2017, 83, 40–52. [Google Scholar] [CrossRef]
- Vajdi, A.; Zhang, G.; Wang, Y.; Wang, T. A new self-management model for large-scale event-driven wireless sensor networks. IEEE Sens. J. 2016, 16, 7537–7544. [Google Scholar] [CrossRef]
- Mirzaie, M.; Mazinani, S.M. MCFL: An energy efficient multi-clustering algorithm using fuzzy logic in wireless sensor network. Wirel. Netw. 2017, 1–16. [Google Scholar] [CrossRef]
- Qin, J.; Fu, W.; Gao, H.; Zheng, W.X. Distributed k-means algorithm and fuzzy c-means algorithm for sensor networks based on multiagent consensus theory. IEEE Trans. Cybern. 2016, 47, 772–783. [Google Scholar] [CrossRef] [PubMed]
- Sharifkhani, A.; Beauliéu, N.C. A mobile-sink-Based packet transmission scheduling algorithm for dense wireless sensor networks. IEEE Trans. Veh. Technol. 2009, 58, 2509–2518. [Google Scholar] [CrossRef]
- Nakayama, H.; Fadlullah, Z.M.; Ansari, N.; Kato, N. A novel scheme for WSAN sink mobility based on clustering and set packing techniques. IEEE Trans. Automat. Contr. 2011, 56, 2381–2389. [Google Scholar] [CrossRef]
- Luo, J.; Hubaux, J.P. Joint mobility and routing for lifetime elongation in wireless sensor networks. In Proceedings of the IEEE 24th Annual Joint Conference of the IEEE Computer and Communications Societies (INFOCOM), Miami, FL, USA, 13–17 March 2005; Volume 3, pp. 1735–1746. [Google Scholar]
- Shah, R.C.; Roy, S.; Jain, S.; Brunette, W. Data MULEs: Modeling and analysis of a three-tier architecture for sparse sensor networks. Ad Hoc Netw. 2003, 1, 215–233. [Google Scholar] [CrossRef]
- Ma, M.; Yang, Y. Data gathering in wireless sensor networks with mobile collectors. In Proceedings of the 2008 IEEE International Symposium on Parallel and Distributed Processing, Miami, FL, USA, 14–18 April 2008; pp. 1–9. [Google Scholar]
- Xing, G.; Wang, T.; Xie, Z.; Jia, W. Rendezvous planning in wireless sensor networks with mobile elements. IEEE Trans. Mob. Comput. 2008, 7, 1430–1443. [Google Scholar] [CrossRef]
- Chakrabarti, A.; Sabharwal, A.; Aazhang, B. Communication power optimization in a sensor network with a path-constrained mobile observer. ACM Trans. Sens. Netw. 2006, 2, 297–324. [Google Scholar] [CrossRef]
- Qadori, H.Q.; Zulkarnain, Z.A.; Hanapi, Z.M.; Subramaniam, S. A spawn mobile agent itinerary planning approach for energy-efficient data gathering in wireless sensor networks. Sensors 2017, 17, 1280. [Google Scholar] [CrossRef] [PubMed]
- Chatzigiannakis, I.; Kinalis, A.; Nikoletseas, S. Efficient data propagation strategies in wireless sensor networks using a single mobile sink. Comput. Commun. 2008, 31, 896–914. [Google Scholar] [CrossRef]
- Chatzigiannakis, I.; Kinalis, A.; Nikoletseas, S.; Rolim, J. Fast and energy efficient sensor data collection by multiple mobile sinks. In Proceedings of the 5th ACM International Workshop on Mobility Management and Wireless Access, Chania, Crete, Greece, 22–26 October 2007; pp. 25–32. [Google Scholar]
- Chatzigiannakis, I.; Kinalis, A.; Mylonas, G.; Nikoletseas, S.; Prasinos, G.; Zaroliagis, C. TRAILS, a toolkit for efficient, realistic and evolving models of mobility, faults and obstacles in wireless networks. In Proceedings of the 41st Annual Simulation Symposium (anss-41 2008), Ottawa, ON, Canada, 13–16 April 2008; pp. 23–32. [Google Scholar]
- Yang, G.; Liu, S.; He, X.; Xiong, N.; Wu, C. Adjustable trajectory design based on node density for mobile sink in WSNs. Sensors 2016, 16, 2091. [Google Scholar] [CrossRef] [PubMed]
- Konstantopoulos, C.; Pantziou, G.; Gavalas, D.; Mpitziopoulos, A.; Mamalis, B. A rendezvous-based approach enabling energy-efficient sensory data collection with mobile Sinks. IEEE Trans. Parallel Distrib. Syst. 2012, 23, 809–817. [Google Scholar] [CrossRef]
- Chen, G.; Li, C.; Ye, M.; Wu, J. An unequal cluster-based routing protocol in wireless sensor networks. Wirel. Netw. 2009, 15, 193–207. [Google Scholar] [CrossRef]
- Tashtarian, F.; Yaghmaee Moghaddam, M.H.; Sohraby, K.; Effati, S. On maximizing the lifetime of wireless sensor networks in event-driven applications with mobile sinks. IEEE Trans. Veh. Technol. 2015, 64, 3177–3189. [Google Scholar] [CrossRef]
- Ota, K.; Dong, M.; Cheng, Z.; Wang, J.; Li, X.; Shen, X. ORACLE: Mobility control in wireless sensor and actor networks. Comput. Commun. 2012, 35, 1029–1037. [Google Scholar] [CrossRef]
- Huynh, T.T.; Dinh-Duc, A.V.; Tran, C.H. Delay-constrained energy-efficient cluster-based multi-hop routing in wireless sensor networks. J. Commun. Netw. 2016, 18, 580–588. [Google Scholar]
- Chang, Y.; Tang, H.; Li, B.; Yuan, X. Distributed joint optimization routing algorithm based on the analytic hierarchy process for wireless sensor networks. IEEE Commun. Lett. 2017, 21, 2718–2721. [Google Scholar] [CrossRef]
- Lai, X.; Ji, X.; Zhou, X.; Chen, L. Energy efficient link-delay aware routing in wireless sensor networks. IEEE Sens. J. 2018, 18, 837–848. [Google Scholar] [CrossRef]
- Lee, J.S.; Cheng, W.L. Fuzzy-logic-based clustering approach for wireless sensor networks using energy predication. IEEE Sens. J. 2012, 12, 2891–2897. [Google Scholar] [CrossRef]
- Chamam, A.; Pierre, S. On the planning of wireless sensor networks: Energy-efficient clustering under the joint routing and coverage constraint. IEEE Trans. Mob. Comput. 2009, 8, 1077–1086. [Google Scholar] [CrossRef]
- Rappaport, T.S. Wireless Communications: Principles and Practice; Prentice-Hall: Uppper Saddle River, NJ, USA, 1996; Volume 2. [Google Scholar]
- Korte, B.; Vygen, J. Combinatorial Optimization: Theory and Algorithms; Springer: Berlin, Germany, 2002. [Google Scholar]
- Zhou, J.; Cao, K.; Cong, P.; Wei, T.; Chen, M.; Zhang, G.; Yan, J.; Ma, Y. Reliability and temperature constrained task scheduling for makespan minimization on heterogeneous multi-core platforms. J. Syst. Softw. 2017, 133, 1–16. [Google Scholar] [CrossRef]
- Zadeh, L.A. Fuzzy logic. Computer 1988, 21, 83–93. [Google Scholar] [CrossRef]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Abo-Zahhad, M.; Ahmed, S.M.; Sabor, N.; Sasaki, S. Mobile sink-based adaptive immune energy-efficient clustering protocol for improving the lifetime and stability period of wireless sensor networks. IEEE Sens. J. 2015, 15, 4576–4586. [Google Scholar] [CrossRef]
- Wang, T.; Zhang, G.; Yang, X.; Vajdi, A. A trusted and energy efficient approach for cluster-based wireless sensor networks. Int. J. Distrib. Sens. Netw. 2016, 2016, 1–13. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Residual Energy | Number of Neighbor-Nodes | Distance from Mobile-Sink | Potentiality |
|---|---|---|---|
| Very High | High | High | Low |
| Very High | High | Medium | Low |
| Very High | High | Low | Low |
| Very High | Medium | High | Medium |
| Very High | Medium | Medium | Medium |
| Very High | Medium | Low | High |
| Very High | Low | High | High |
| Very High | Low | Medium | High |
| Very High | Low | Low | High |
| High | High | High | Low |
| High | High | Medium | Low |
| High | High | Low | Low |
| High | Medium | High | Medium |
| High | Medium | Medium | Medium |
| High | Medium | Low | High |
| High | Low | High | High |
| High | Low | Medium | High |
| High | Low | Low | High |
| Medium | High | High | Medium |
| Medium | High | Medium | Medium |
| Medium | High | Low | Medium |
| Medium | Medium | High | Low |
| Medium | Medium | Medium | Medium |
| Medium | Medium | Low | High |
| Medium | Low | High | Medium |
| Medium | Low | Medium | Medium |
| Medium | Low | Low | Medium |
| Low | High | High | Very Low |
| Low | High | Medium | Very Low |
| Low | High | Low | Low |
| Low | Medium | High | Very Low |
| Low | Medium | Medium | Very Low |
| Low | Medium | Low | Low |
| Low | Low | High | Very Low |
| Low | Low | Medium | Very Low |
| Low | Low | Low | Low |
| Very Low | High | High | Very Low |
| Very Low | High | Medium | Very Low |
| Very Low | High | Low | Very Low |
| Very Low | Medium | High | Very Low |
| Very Low | Medium | Medium | Very Low |
| Very Low | Medium | Low | Very Low |
| Very Low | Low | High | Very Low |
| Very Low | Low | Medium | Very Low |
| Very Low | Low | Low | Very Low |
| Parameter | WSN#1 | WSN#2 | WSN#3 | WSN#4 |
|---|---|---|---|---|
| Area (L × L) | 100 × 100 | 100 × 100 | 200 × 200 | 200 × 200 |
| Number of sensor-nodes | 100 | 100 | 200 | 200 |
| Initial energy of the sensor-nodes | 0.5 J | 0.5 J | 0.5 J | 0.5 J |
| Communication radius of sensor-nodes | 10 m | 10 m | 20 m | 20 m |
| 50 nJ/bit | 50 nJ/bit | 50 nJ/bit | 50 nJ/bit | |
| 10 pJ/bit/ | 10 pJ/bit/ | 10 pJ/bit/ | 10 pJ/bit/ | |
| 0.0013 pJ/bit/ | 0.0013 pJ/bit/ | 0.0013 pJ/bit/ | 0.0013 pJ/bit/ | |
| Energy for data aggregation () | 5 nJ/bit | 5 nJ/bit | 5 nJ/bit | 5 nJ/bit |
| Aggregation rate | 0.6 | 0.8 | 0.6 | 0.8 |
| Control packet | 200 bits | 200 bits | 200 bits | 200 bits |
| Message packet | 4000 bits | 4000 bits | 4000 bits | 4000 bits |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vajdi, A.; Zhang, G.; Zhou, J.; Wei, T.; Wang, Y.; Wang, T. A New Path-Constrained Rendezvous Planning Approach for Large-Scale Event-Driven Wireless Sensor Networks. Sensors 2018, 18, 1434. https://doi.org/10.3390/s18051434
Vajdi A, Zhang G, Zhou J, Wei T, Wang Y, Wang T. A New Path-Constrained Rendezvous Planning Approach for Large-Scale Event-Driven Wireless Sensor Networks. Sensors. 2018; 18(5):1434. https://doi.org/10.3390/s18051434
Chicago/Turabian StyleVajdi, Ahmadreza, Gongxuan Zhang, Junlong Zhou, Tongquan Wei, Yongli Wang, and Tianshu Wang. 2018. "A New Path-Constrained Rendezvous Planning Approach for Large-Scale Event-Driven Wireless Sensor Networks" Sensors 18, no. 5: 1434. https://doi.org/10.3390/s18051434
APA StyleVajdi, A., Zhang, G., Zhou, J., Wei, T., Wang, Y., & Wang, T. (2018). A New Path-Constrained Rendezvous Planning Approach for Large-Scale Event-Driven Wireless Sensor Networks. Sensors, 18(5), 1434. https://doi.org/10.3390/s18051434