Heading Estimation of Robot Combine Harvesters during Turning Maneuveres

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
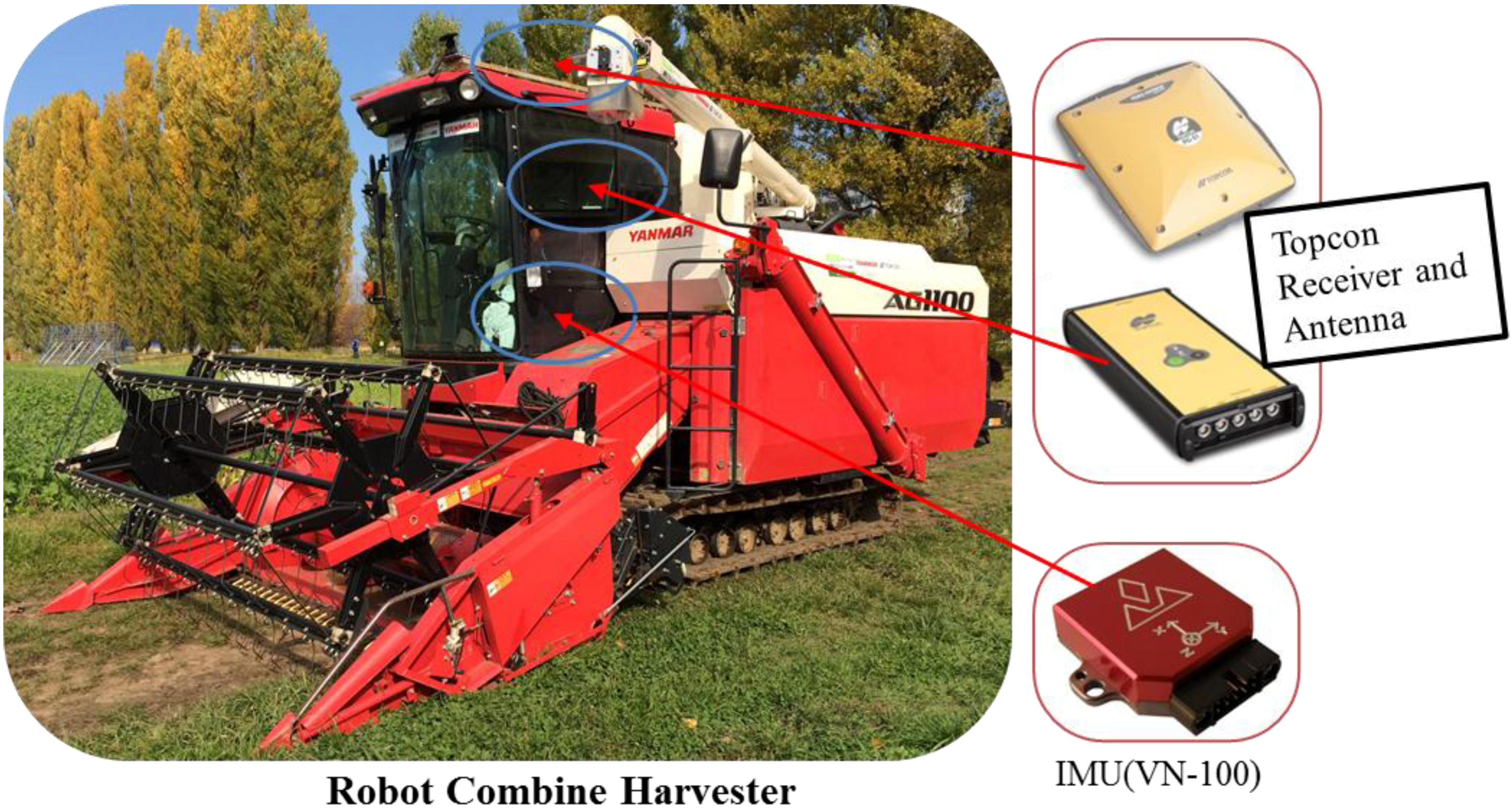
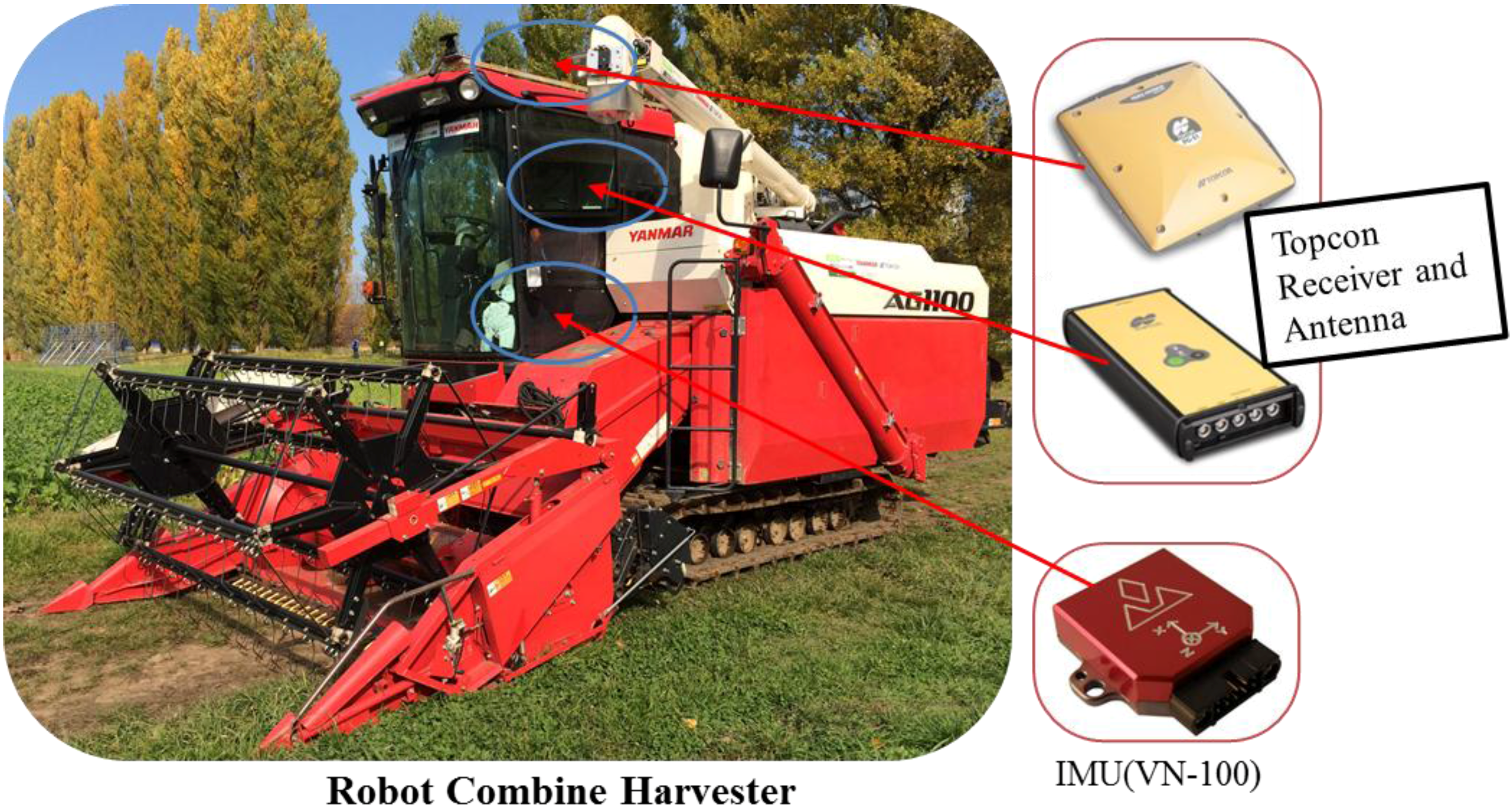
2.1. System Platform and Sensors
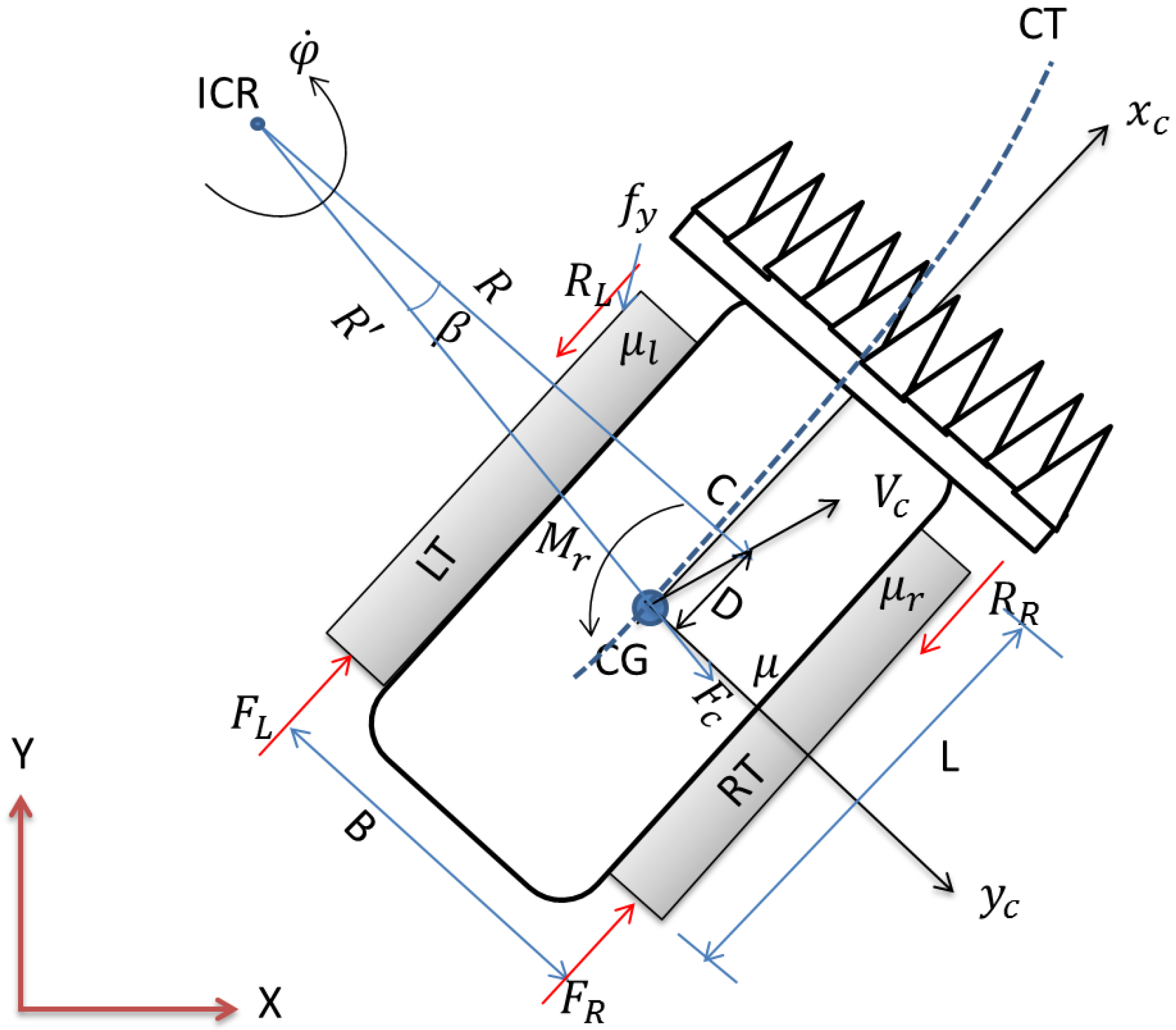
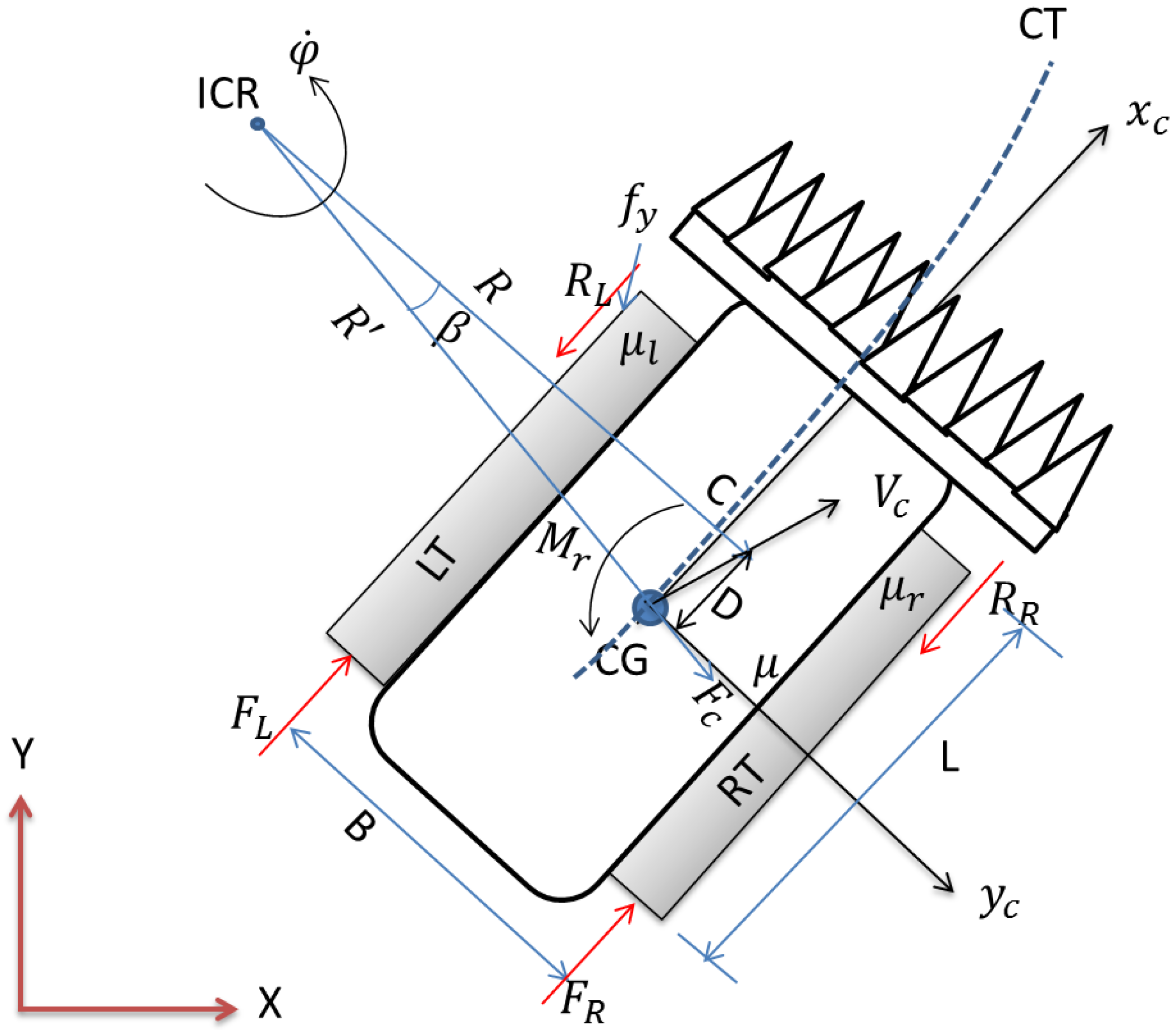
2.2. Tracked Combine Harvester Model
2.3. RTK-GPS and IMU Fusion Algorithm
- = Tracked combine harvester position in the east direction at time ;
- = Tracked combine harvester position in the north direction at time ;
- = Tracked combine harvester velocity in the X-direction at time ;
- = Tracked combine harvester velocity in the Y-direction at time ;
- = Yaw rate at time ;
- = Heading of tracked combine harvester at time ;
- = Heading from RTK-GPS at time ; and
- = Yaw rate gyro measurement bias at time .
- = Measurement position in the east direction from RTK-GPS;
- = Measurement position in the north direction from RTK-GPS;
- = Yaw rate gyro measurement from the IMU; and
- = Measurement heading from the RTK-GPS.
- Innovation,
- Kalman gain,
- Innovation covariance,
3. Results and Discussion
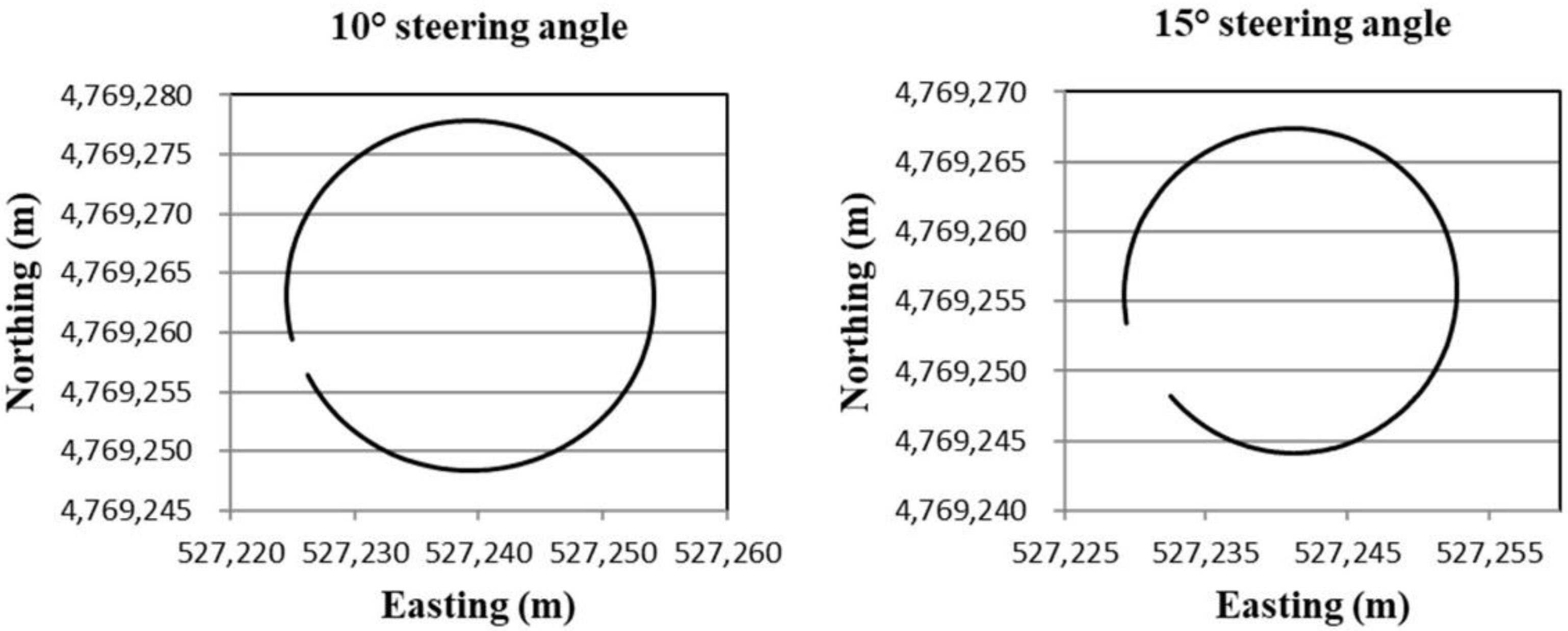
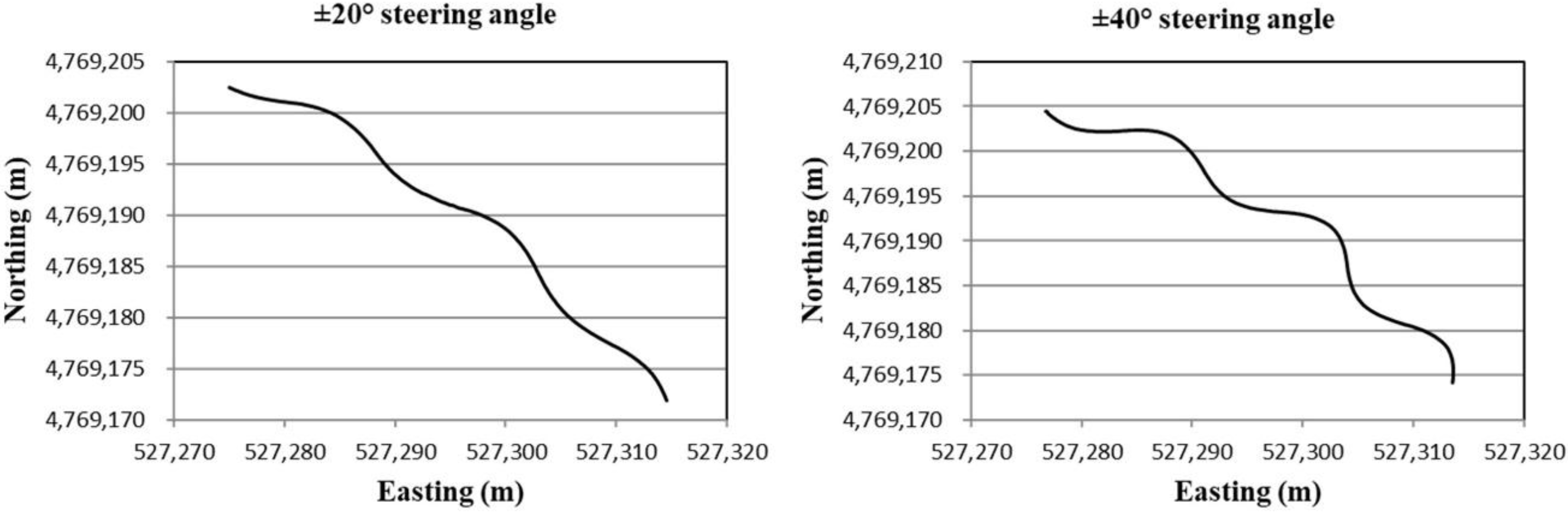
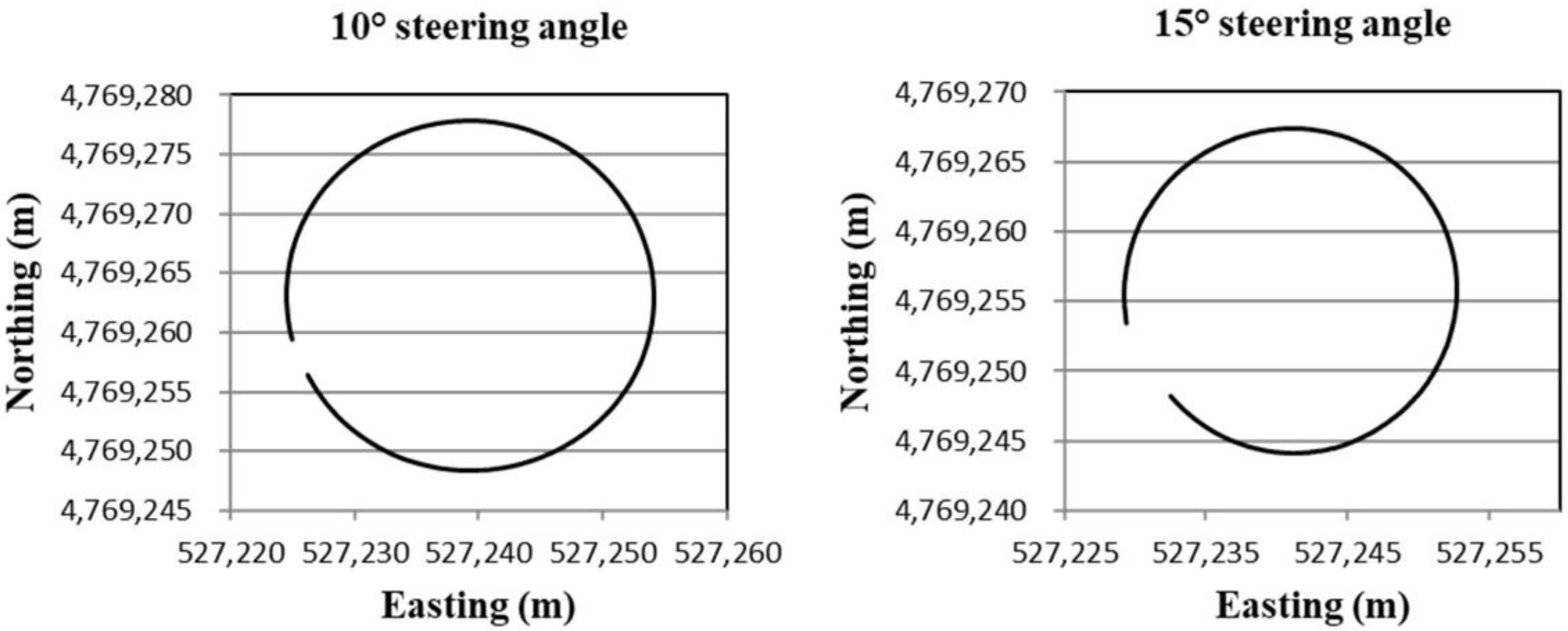
3.1. Trajectory of Tracked Combine Harvester
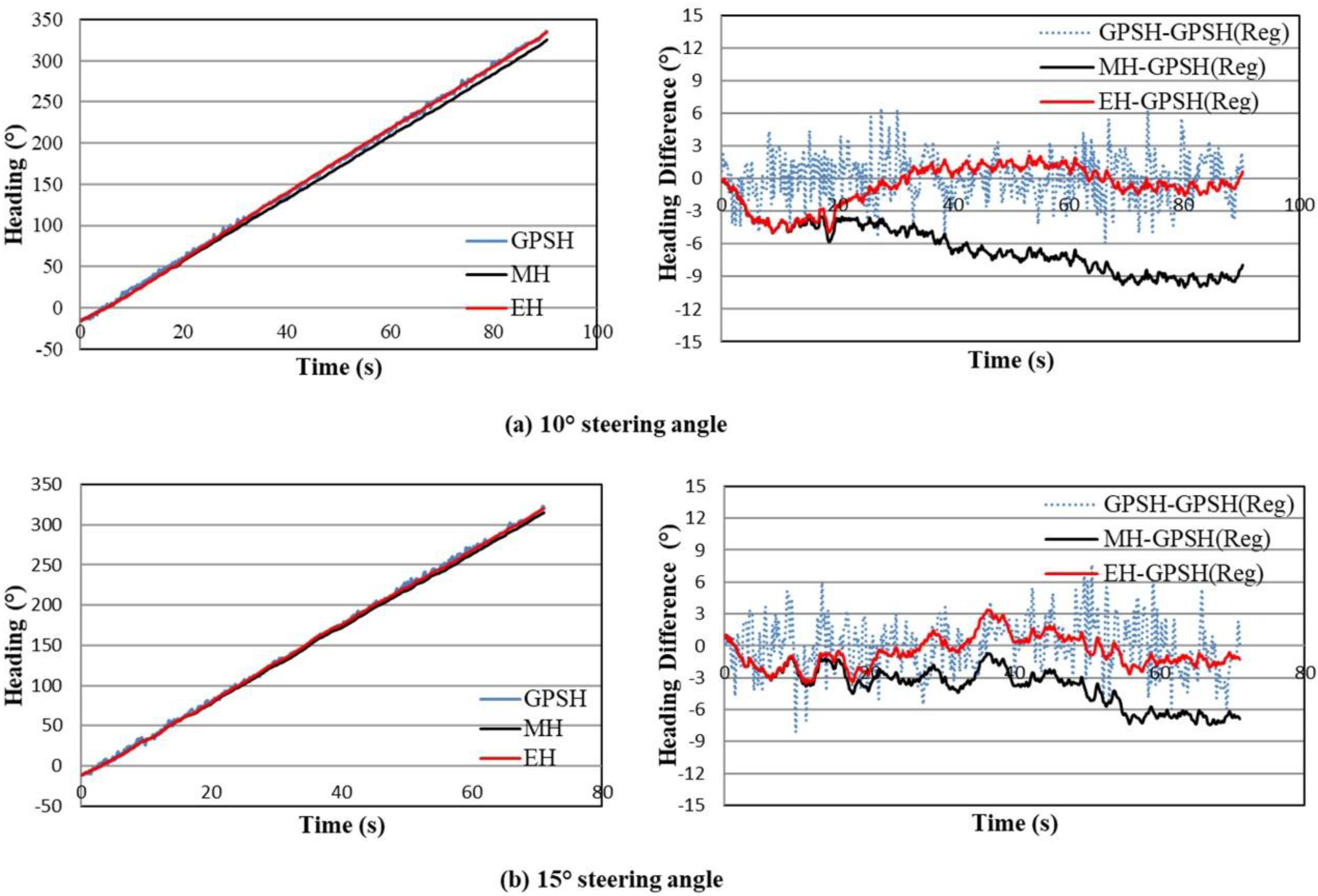
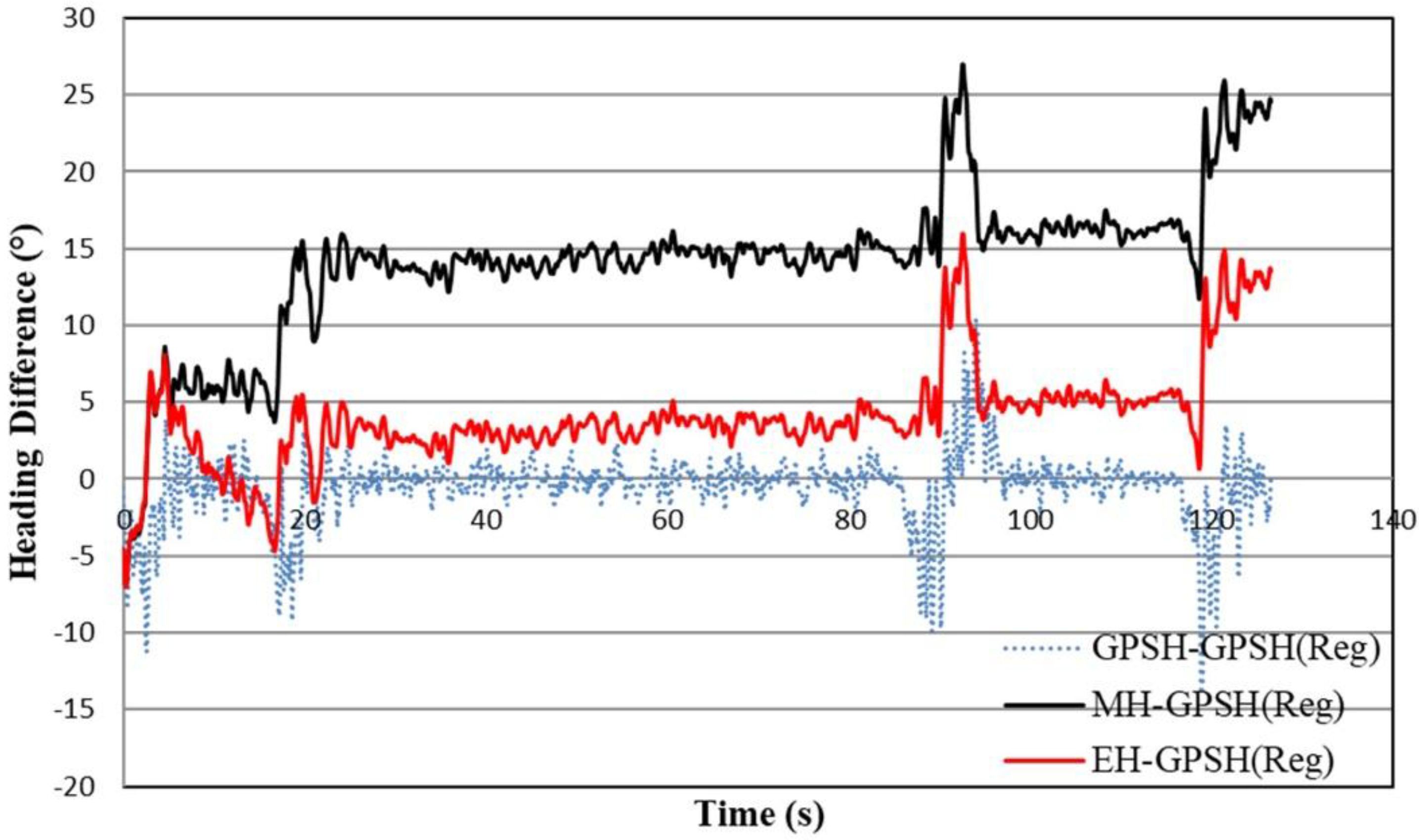
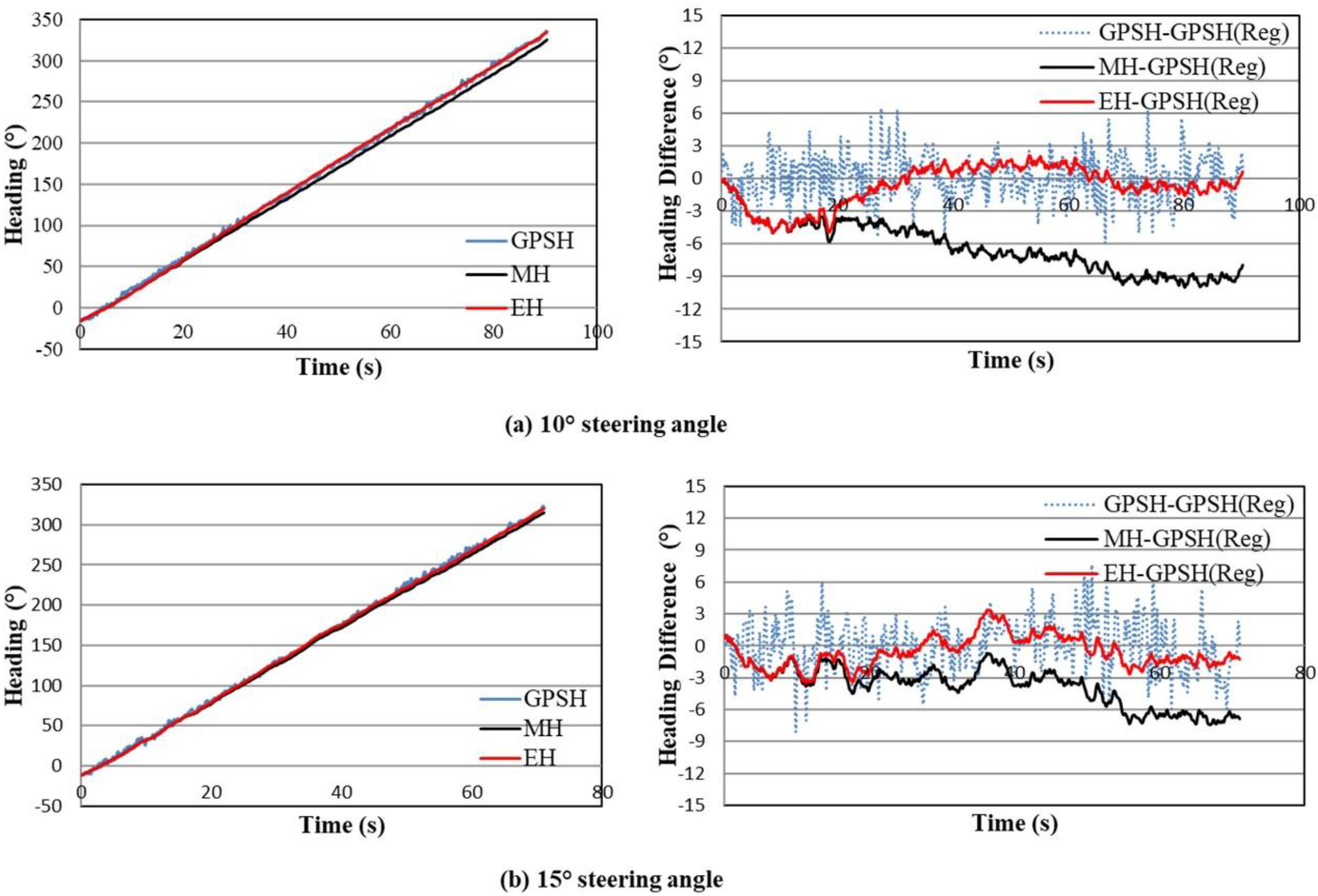
3.2. Estimated Heading of Circular Trajectory
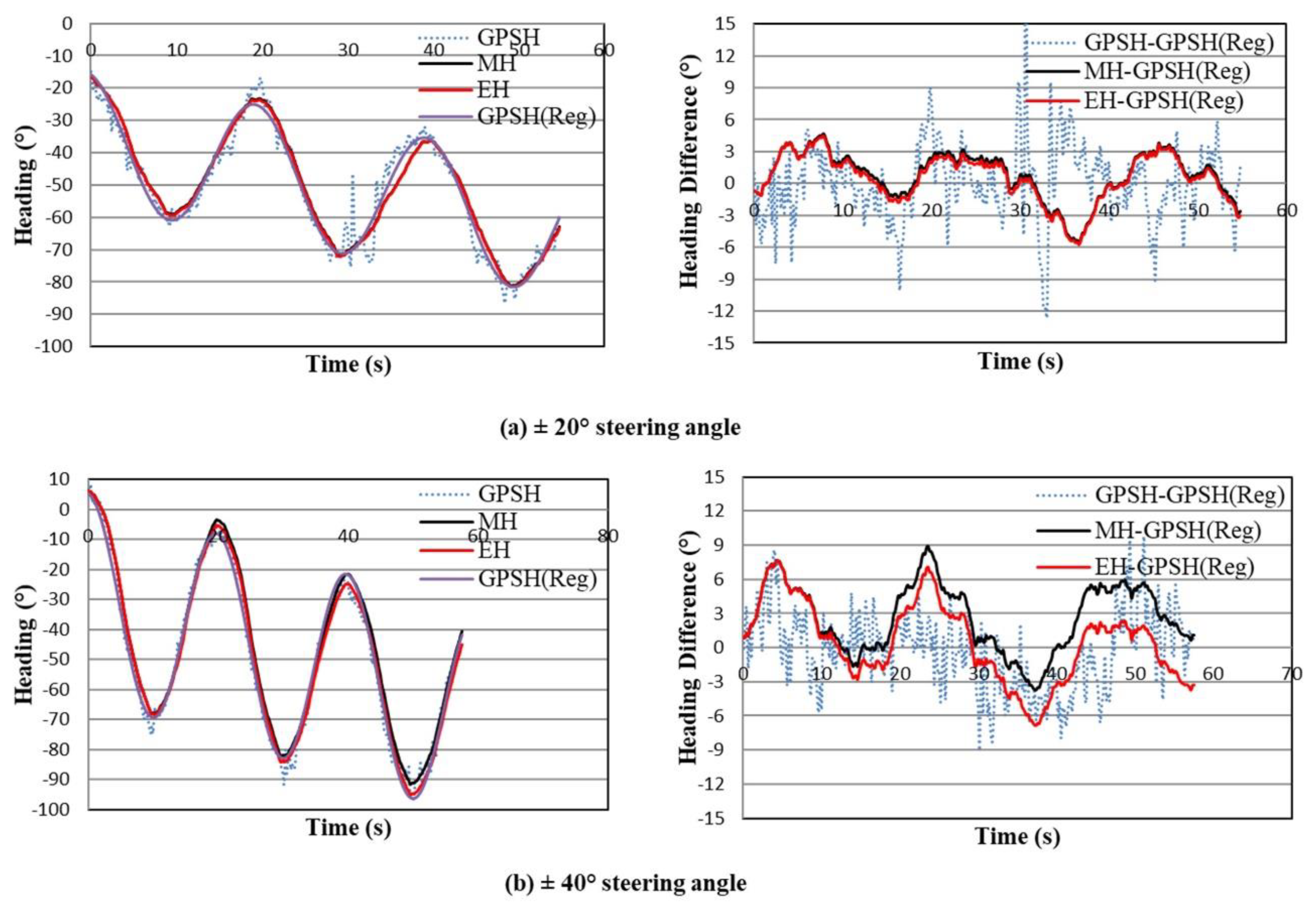
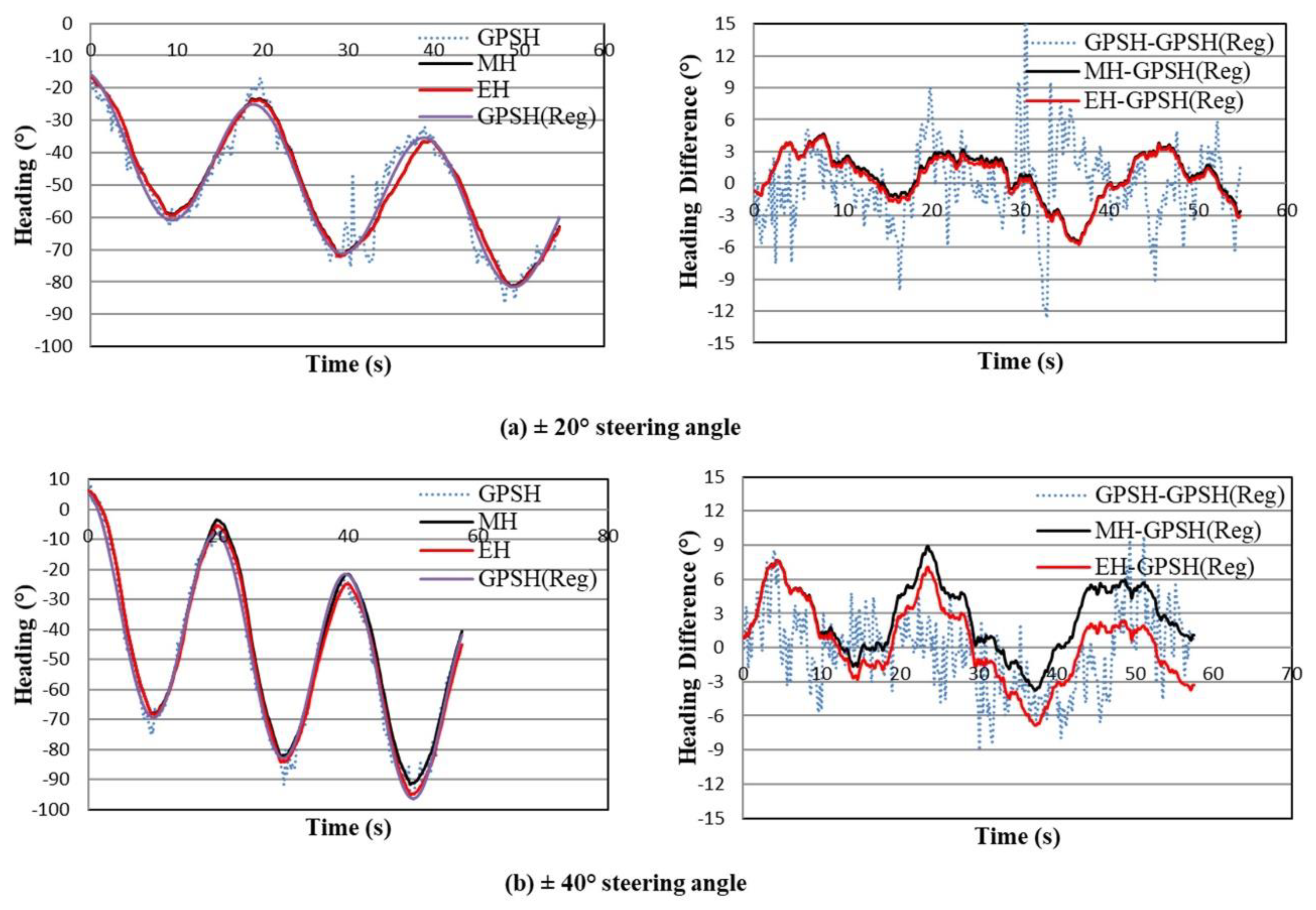
3.3. Estimated Heading of Sinusoidal Trajectory
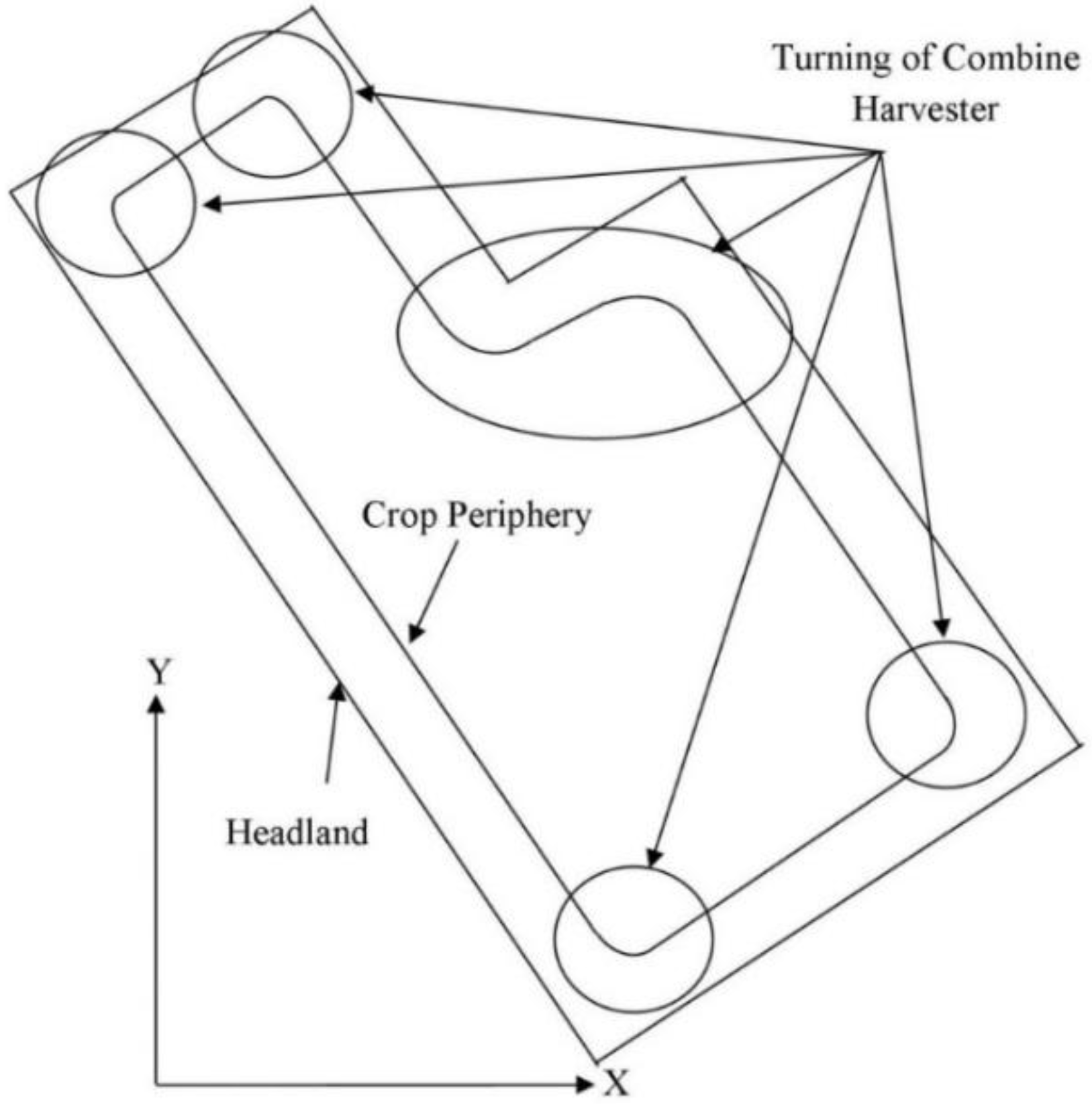
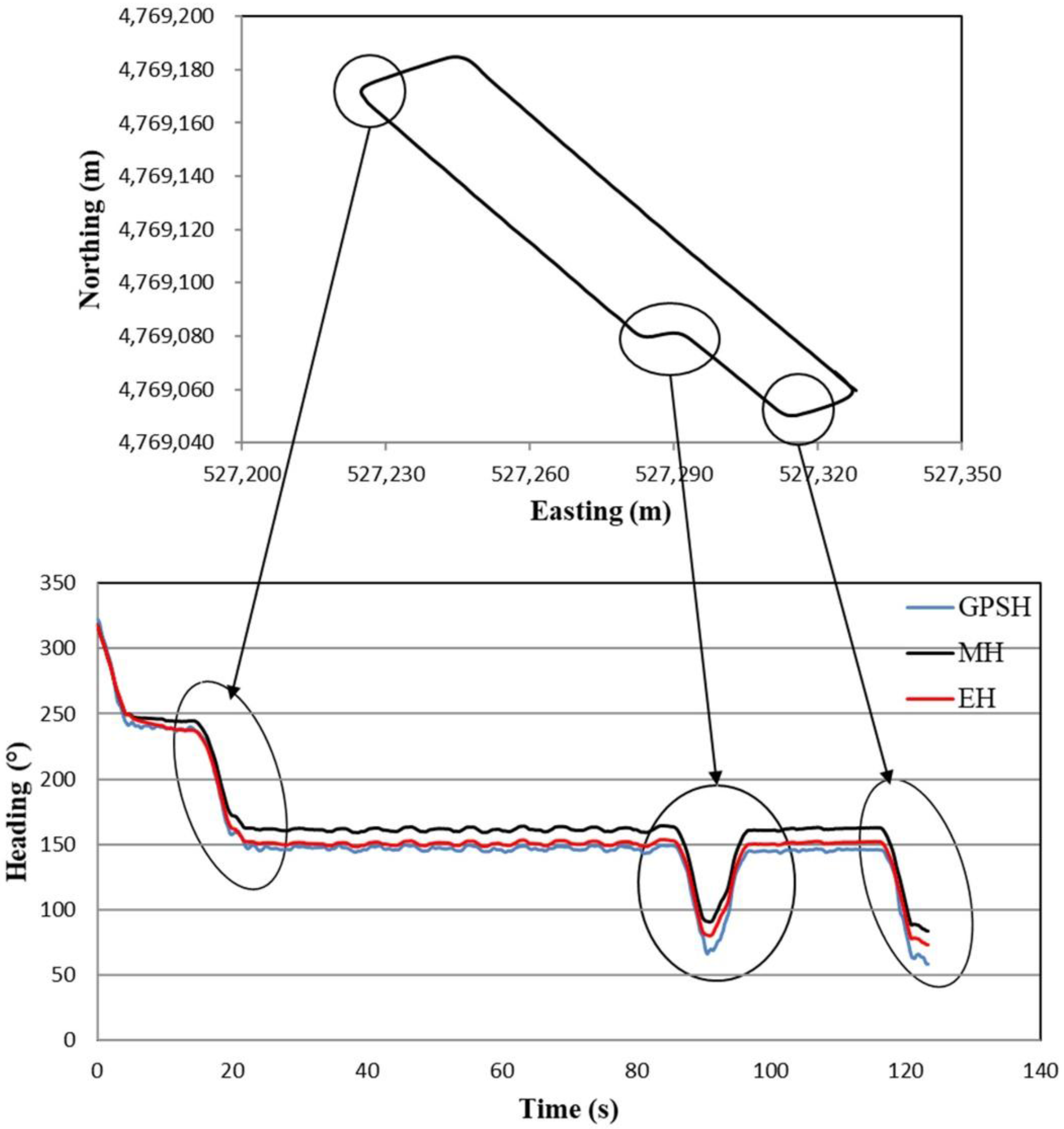
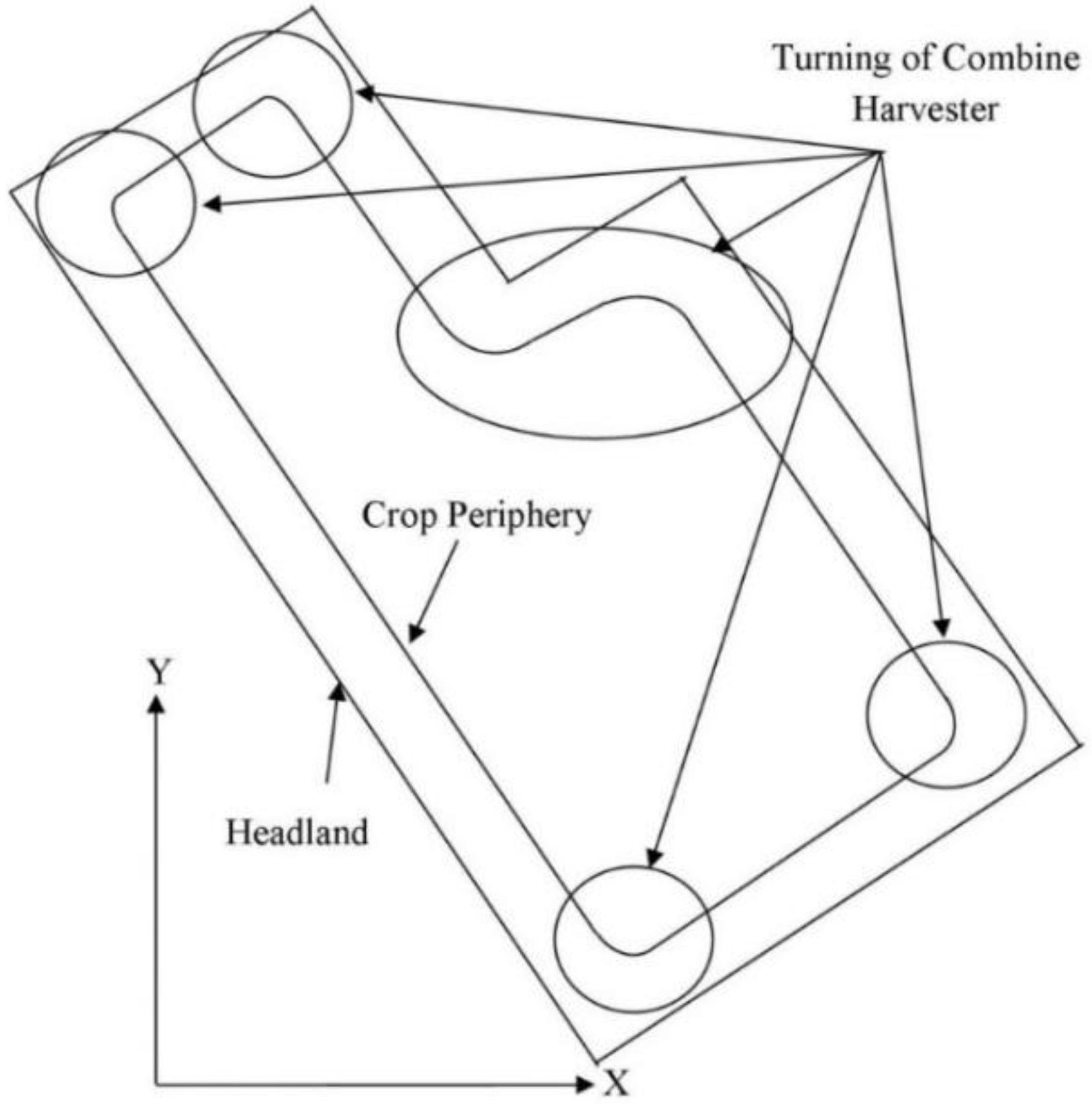
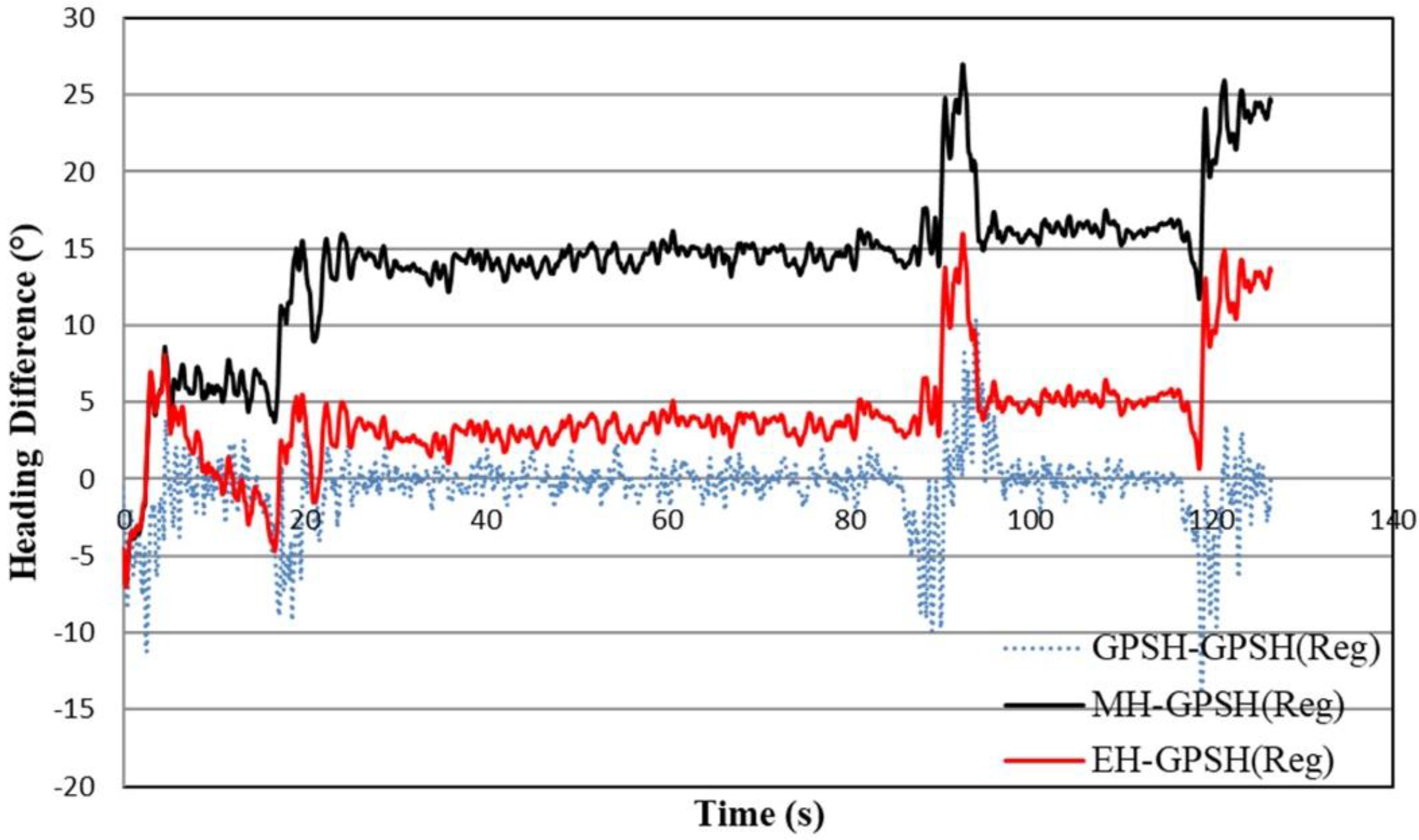
3.4. Estimated Heading of Concave Polygon Field
4. Conclusions
Author Contributions
Conflicts of Interest
References
- Zhang, Q.; Reid John, F.; Noguchi, N. Agricultural vehicle navigation using multiple guidance sensors. In Proceedings of the International Conference on Field and Service Robotics, Pittsburgh, PA, USA, 29–31 August 1999. [Google Scholar]
- Benson, E.R.; Reid, J.F.; Zhang, Q. Machine vision based steering system for agricultural combines. In Proceedings of the ASAE Annual Meeting, Sacramento, CA, USA, 31 July–2 August 2001. [Google Scholar]
- Choi, J. Development of Guidance System Using Local Sensors for Agricultural Vehicles. Ph.D. Thesis, Graduate School of Agriculture, Hokkaido University, Sapporo, Japan, 25 March 2014. Available online: http://hdl.handle.net/2115/56098 (accessed on 25 March 2014).
- Ishii, K.; Terao, H.; Noguchi, N. Studies on Self-learning Autonomous Vehicles (Part-1). J. Jpn. Soc. Agric. Mach. 1994, 56, 53–60. [Google Scholar]
- Kise, M.; Noguchi, N.; Ishii, K.; Terao, H. Field mobile robot navigated by RTK-GPS and FOG (Part-2). J. Jpn. Soc. Agric. Mach. 2001, 63, 80–85. [Google Scholar]
- Adla, R.; Yousef, B.; Al-Holou, N. Multi sensor Data Fusion, Methods and Problems. In Proceedings of the International Conference on Parallel and Distributed Processing Techniques and Applications, Las Vegas, NV, USA, 22–23 July 2013; Volume II. [Google Scholar]
- Reinstein, M.; Kubelka, V. Complementary filtering approach to orientation estimation using inertial sensors only. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), St. Paul, MN, USA, 14–18 May 2012. [Google Scholar]
- Alam, M.; Moreno, G.; Sipos, M.; Rohac, J. INS/GNSS localization using 15 state extended Kalman filter. In Proceedings of the International Conference in Aerospace for Young Scientists, Beijing, China, 12–13 November 2016; pp. 425–435. [Google Scholar]
- Azam, S.E.; Chatzi, E.; Papadimitriou1, C.; Smyth, A. Experimental validation of the Kalman-type filters for online and real-time state and input estimation. J. Vib. Control 2017, 23, 2494–2519. [Google Scholar] [CrossRef]
- Rezaeian, A.; Zarringhalam, R.; Fallah, S.; Melek, W.; Khajepour, A.; Chen, S.-K.; Litkouhi, B. Cascaded Dual Extended Kalman Filter for Combined Vehicle State Estimation and Parameter Identification. In Proceedings of the SAE World Congress and Exhibition, Detroit, MI, USA, 16–18 April 2013. [Google Scholar]
- Simanek, J.; Reinstein, M.; Kubelka, V. Evaluation of the EKF-based estimation architectures for data fusion in mobile robots. IEEE ASME Trans. Mechatron. 2015, 20, 985–990. [Google Scholar] [CrossRef]
- Simon, D. Kalman filtering with state constraints: A survey of linear and nonlinear algorithms. IET Control Theory Appl. 2010, 4, 1303–1318. [Google Scholar] [CrossRef]
- Zihajehzadeh, S.; Loh, D.; Lee, T.J.; Hoskinson, R.; Park, E.J. A cascaded Kalman filter-based GPS/MEMS-IMU integration for sports applications. Measurement 2015, 73, 200–210. [Google Scholar] [CrossRef]
- Gustafsson, F.; Gunnarsson, F.; Bergman, N.; Forssell, U.; Jansson, J.; Karlsson, R.; Nordlund, P.-J. Particle filters for positioning, navigation and tracking. IEEE Trans. Signal Process. 2002, 50, 425–437. [Google Scholar] [CrossRef]
- Martino, L.; Read, J.; Elvira, V.; Louzada, F. Cooperative parallel particle filters for online model selection and applications to urban mobility. Digit. Signal Process. 2017, 60, 172–185. [Google Scholar] [CrossRef]
- Míguez, J. Analysis of selection methods for cost-reference particle filtering with applications to maneuvering target tracking and dynamic optimization. Digit. Signal Process. 2007, 17, 787–807. [Google Scholar] [CrossRef]
- Sotak, M.; Sopata, M.; Kmec, F. Navigation systems using Monte Carlo method. In Proceedings of the 6th International ESA Conference on Guidance, Navigation and Control Systems, European Space Agency, Loutraki, Greece, 17–20 October 2005. [Google Scholar]
- Urteaga, I.; Bugallo, M.F.; Djuri’c, P.M. Sequential Monte Carlo Methods under model uncertainty. In Proceedings of the IEEE Statistical Signal Processing Workshop (SSP), Palma de Mallorca, Spain, 26–29 June 2016. [Google Scholar]
- Rohac, J.; Hansen, J.M.; Alam, M.; Sipos, M.; Johansen, T.A.; Thor, I.; Fossen, T.I. Validation of nonlinear integrated navigation solutions. Annu. Rev. Control 2017, 43, 91–106. [Google Scholar] [CrossRef]
- Noguchi, N.; Reid, J.F.; Benson, E.; Will, J.; Stombaugh, T. Vehicle Automation System Based on Multi-Sensor Integration; Paper 983111; ASAE (American Society of Agricultural Engineers): St. Joseph, MI, USA, 1998. [Google Scholar]
- Alatise, M.B.; Hancke, G.P. Pose estimation of a mobile robot based on fusion of IMU data and vision data using an extended Kalman filter. Sensors 2017, 17, 2164. [Google Scholar] [CrossRef] [PubMed]
- Dar, T.M.; Longoria, R.G. Slip estimation for small scale robotic tracked vehicles. In Proceedings of the American Control Conferencem, Marriott Waterfront, Baltimore, MD, USA, 30 June–2 July 2010. [Google Scholar]
- Zhang, Z. Development of a Robot Combine Harvester Based on GNSS. Ph.D. Thesis, Graduate School of Agriculture, Hokkaido University, Sapporo, Japan, 25 March 2014. Available online: http://hdl.handle.net/2115/56100 (accessed on 25 March 2014).
- Rahman, M.M.; Ishii, K.; Noguchi, N. Study on Tracked Combine Harvester Dynamic Model for Automated Navigation Purposes. Adv. Robot. Autom. 2017, 6, 178. [Google Scholar] [CrossRef]
- Rahman, M.M.; Ishii, K.; Noguchi, N. Automatic Path Planning of Robot Combine Harvester based on Optimum Harvesting Area of Convex and Concave Polygon Field. IFAC J. Syst. Control. under review.
- Kitano, M.; Jyozaki, H.A. Theoretical analysis of steerability of tracked vehicles. J. Terramech. 1976, 13, 241–258. [Google Scholar] [CrossRef]
- Wong, J.Y. Theory of Ground Vehicles; A Wiley-Interscience Publication: New York, NY, USA, 2008. [Google Scholar]
- Le, A.T.; Rye David, C.; Durrnat-Whyte Hugh, F. Estimation of track-soil interactions for autonomous tracked vehicles. In Proceedings of the IEEE International Conference on Robotics and Automation, Albuquerque, NM, USA, 20–25 April 1997; pp. 1388–1393. [Google Scholar]


© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rahman, M.M.; Ishii, K. Heading Estimation of Robot Combine Harvesters during Turning Maneuveres. Sensors 2018, 18, 1390. https://doi.org/10.3390/s18051390
Rahman MM, Ishii K. Heading Estimation of Robot Combine Harvesters during Turning Maneuveres. Sensors. 2018; 18(5):1390. https://doi.org/10.3390/s18051390
Chicago/Turabian StyleRahman, Md Mostafizar, and Kazunobu Ishii. 2018. "Heading Estimation of Robot Combine Harvesters during Turning Maneuveres" Sensors 18, no. 5: 1390. https://doi.org/10.3390/s18051390
APA StyleRahman, M. M., & Ishii, K. (2018). Heading Estimation of Robot Combine Harvesters during Turning Maneuveres. Sensors, 18(5), 1390. https://doi.org/10.3390/s18051390