Measurements by A LEAP-Based Virtual Glove for the Hand Rehabilitation




Abstract
1. Introduction
2. Materials and Methods
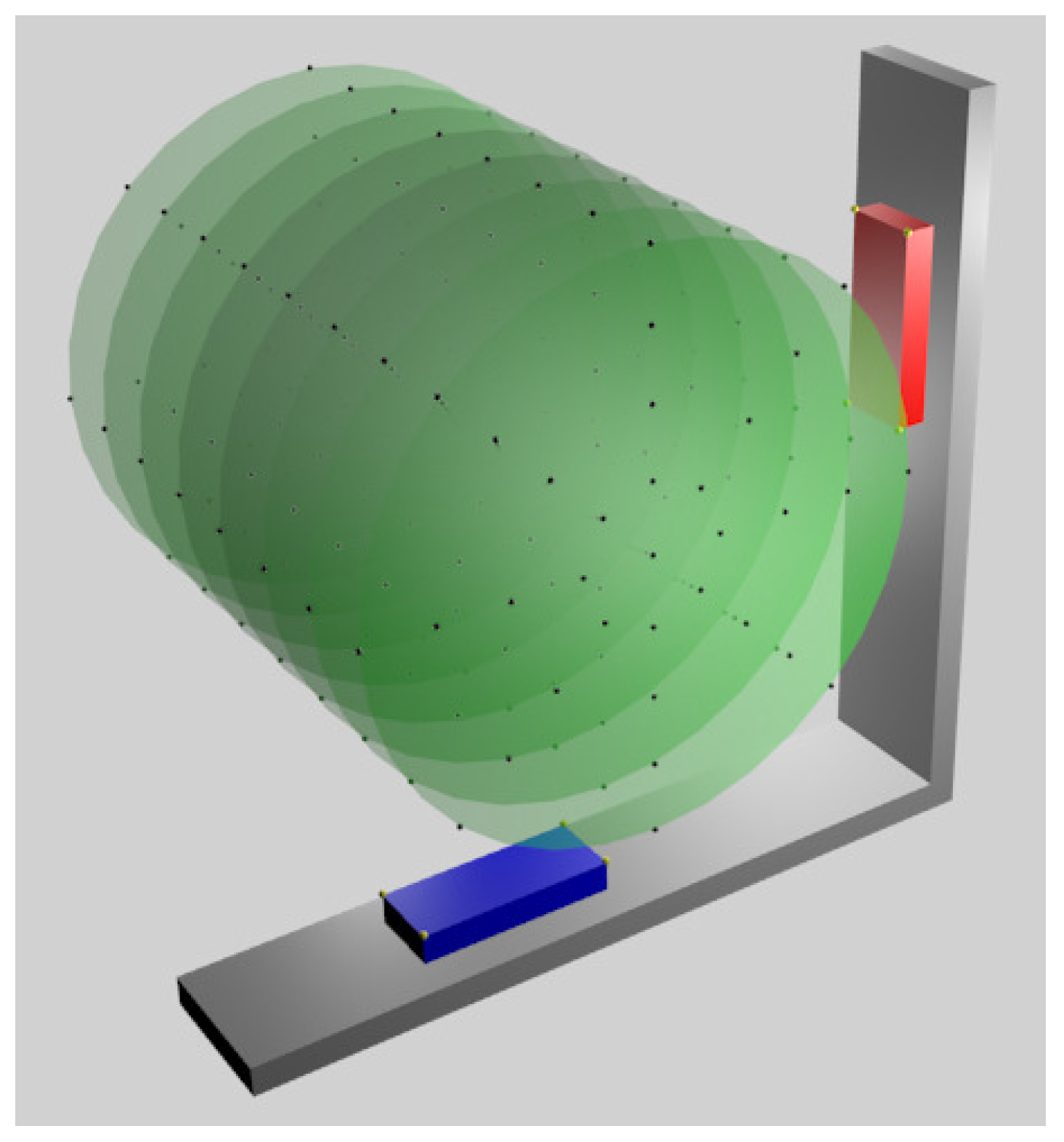
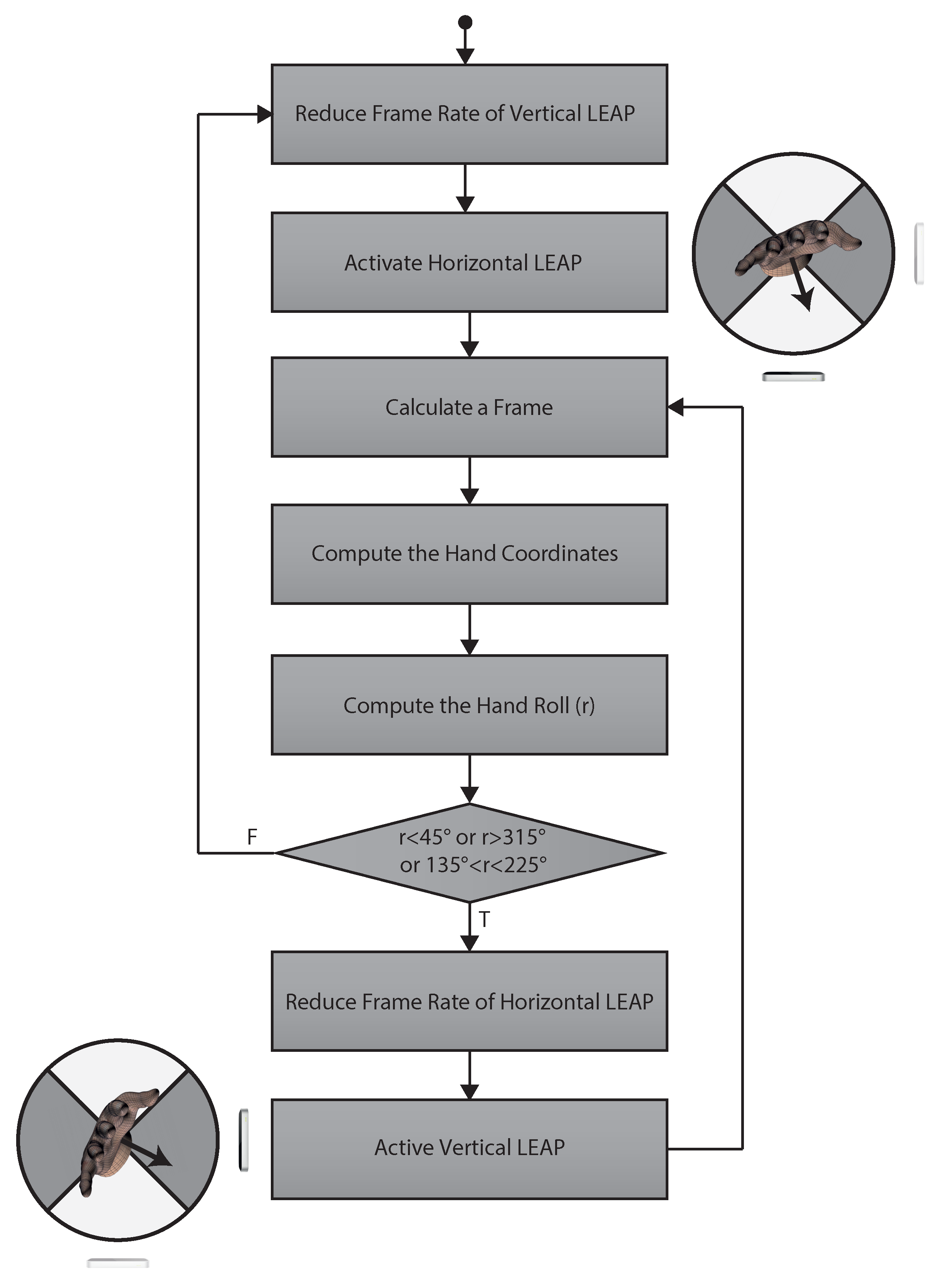
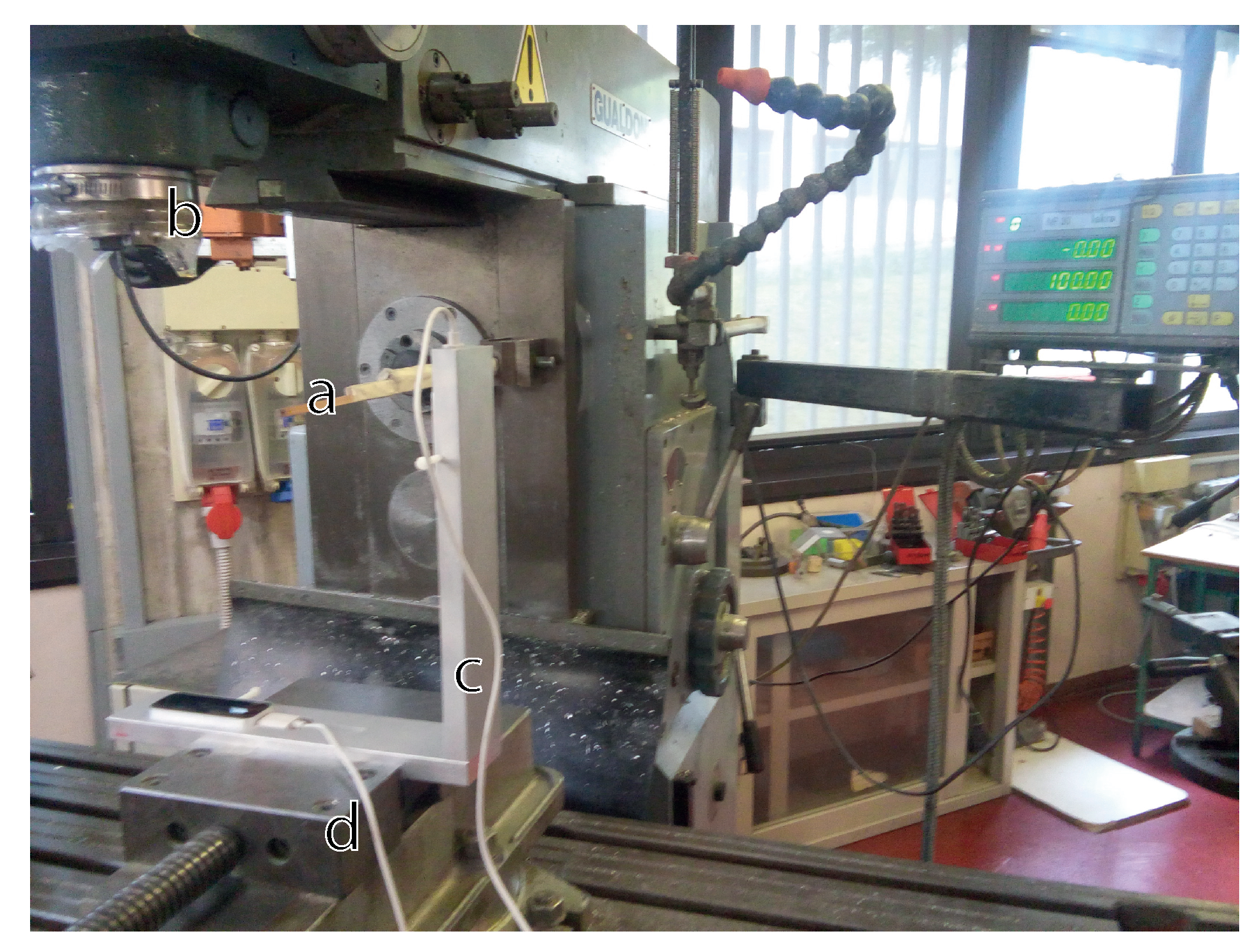
2.1. System Design
2.2. Calibration
3. Results
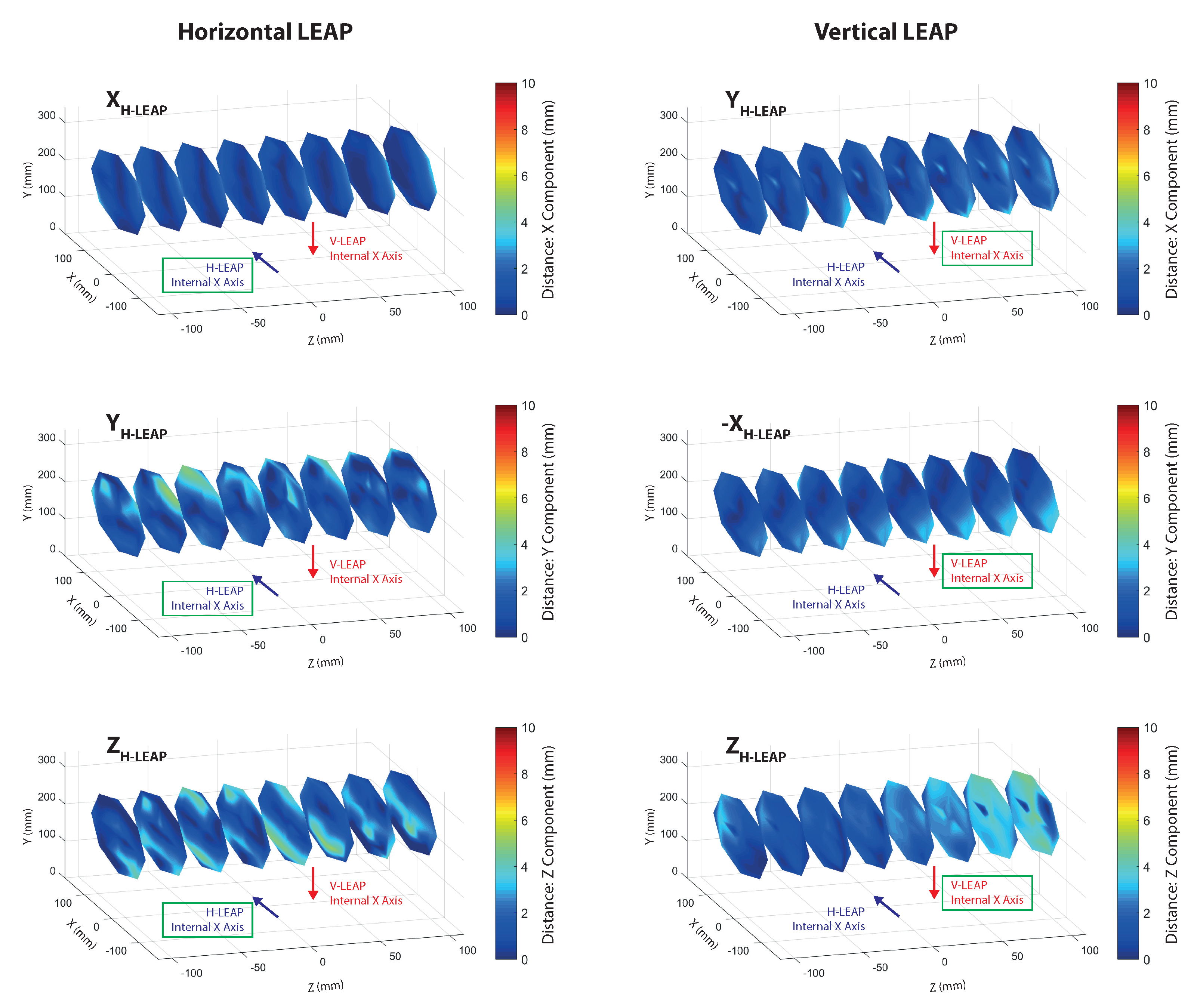
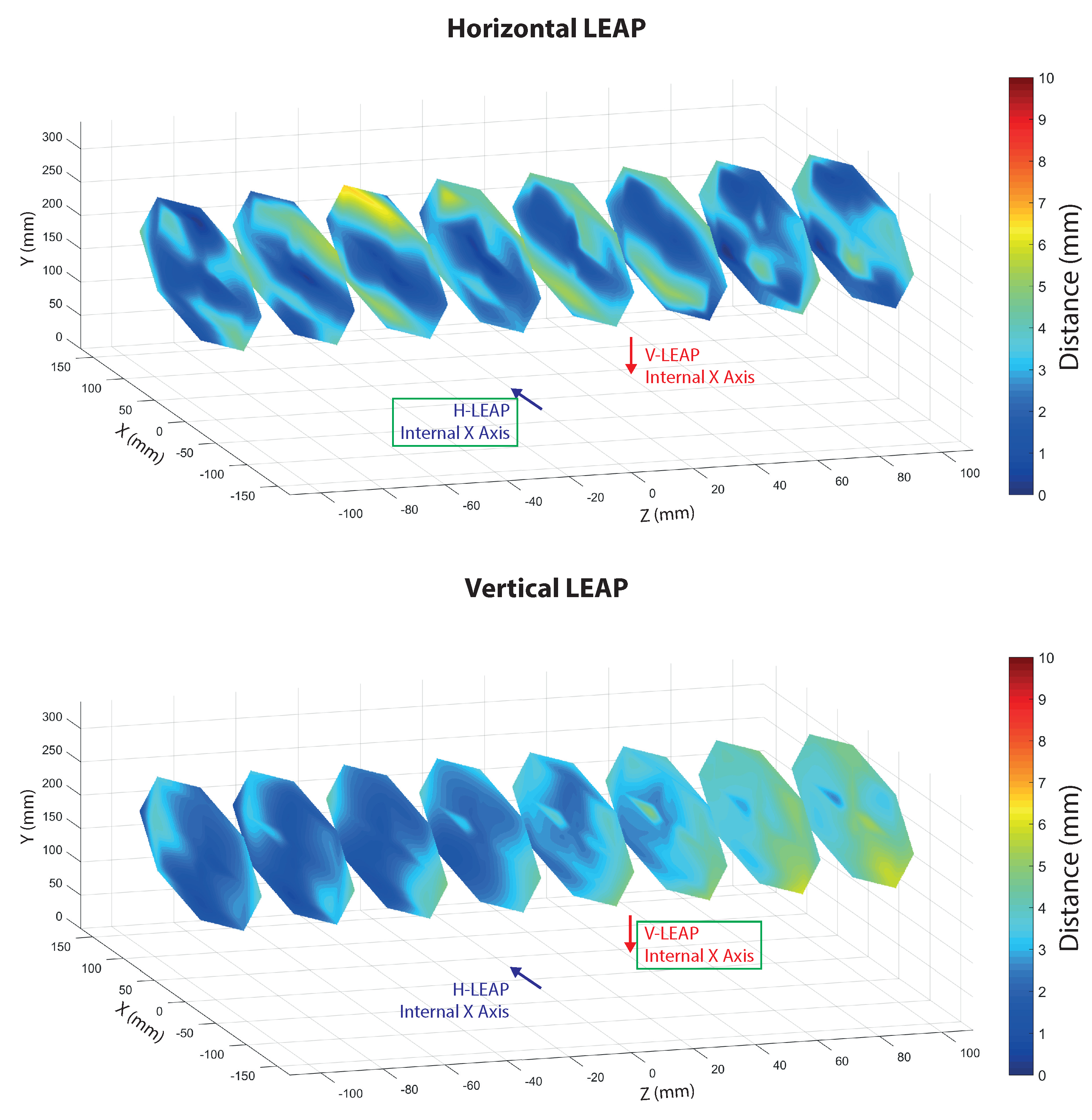
3.1. Static Measurements
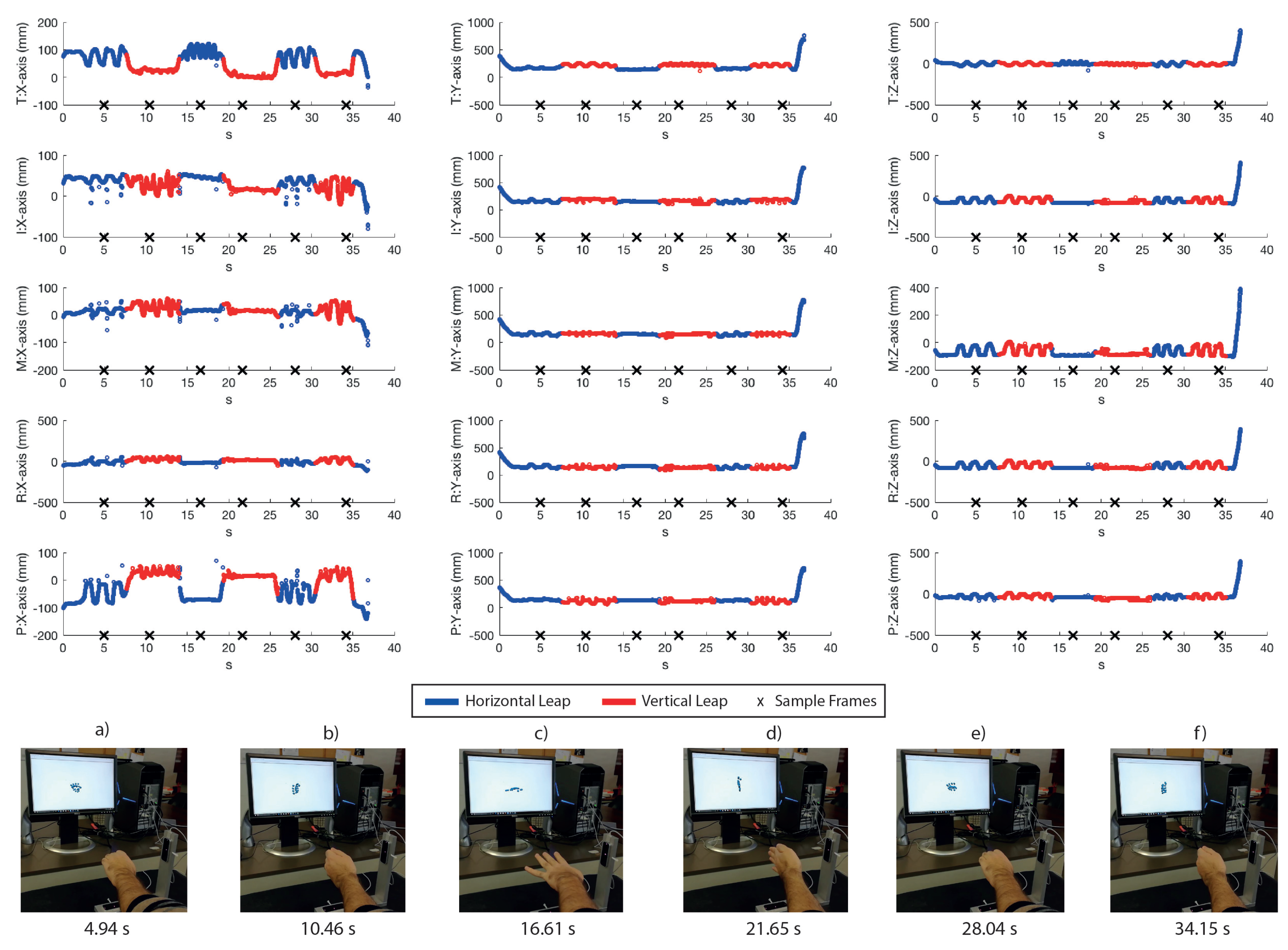
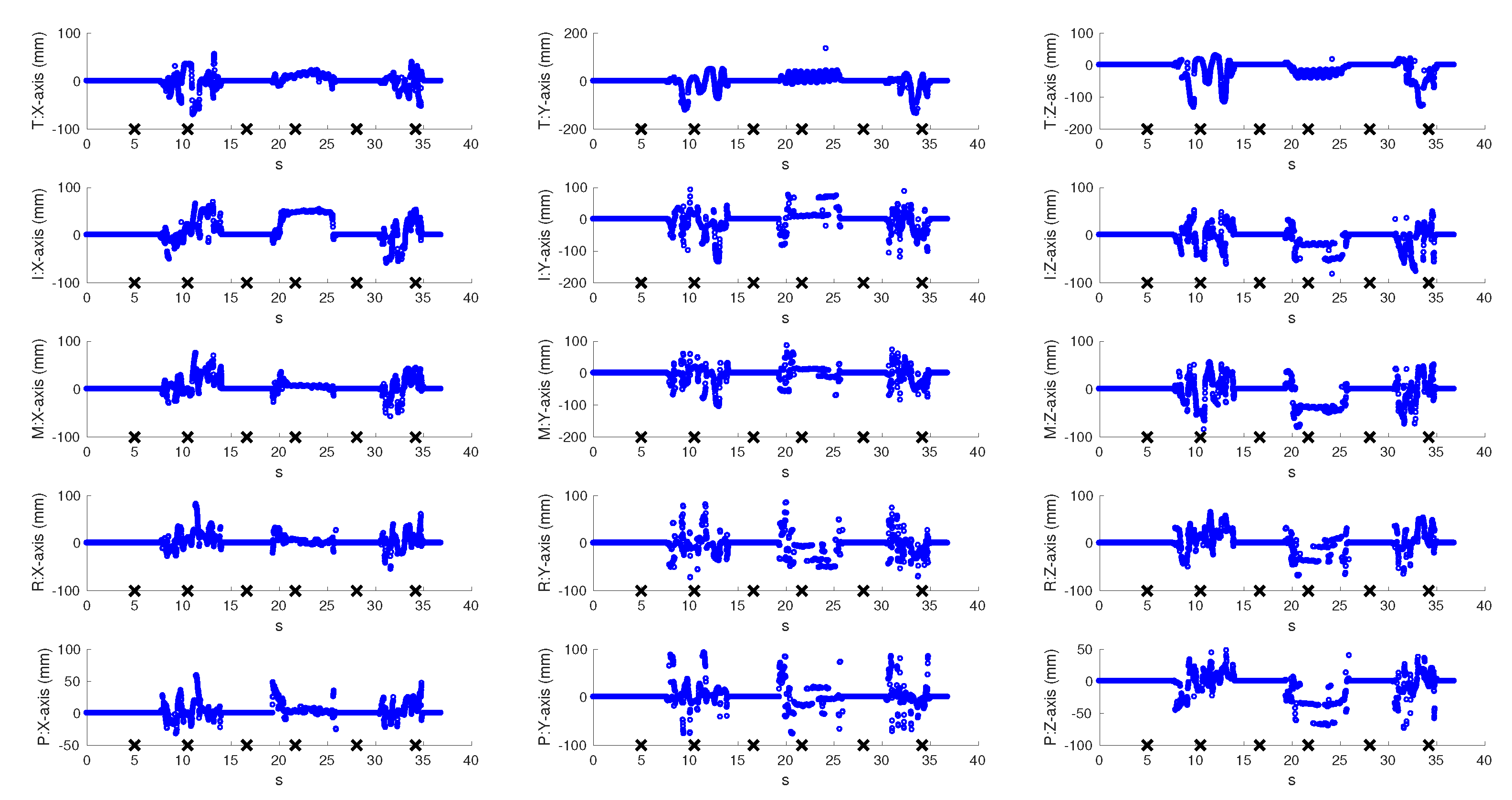
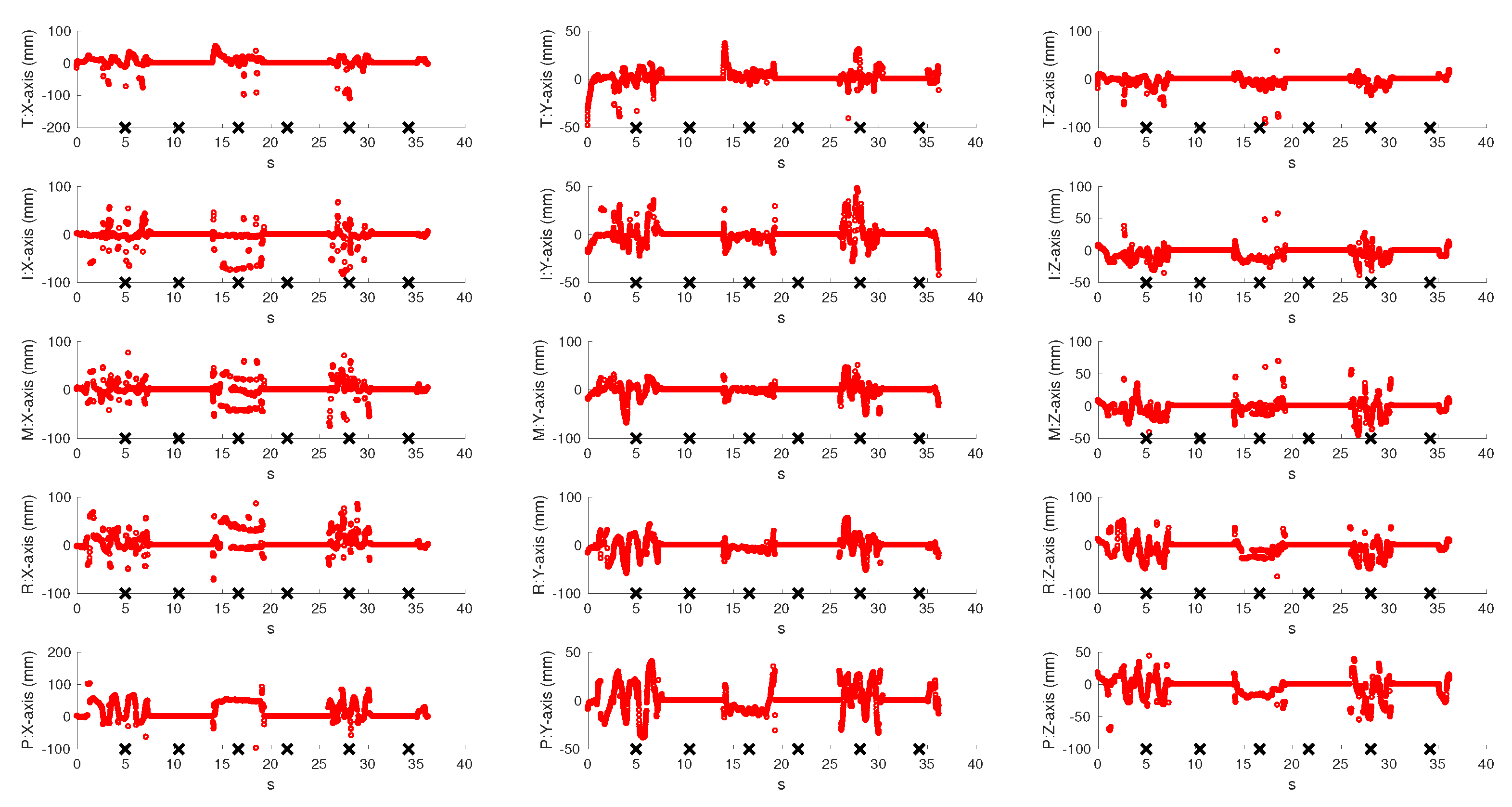
3.2. Hand Tracking Measurements
- The accuracy and the fluidity of the tracking process were adequate and the change of perspective did not produce discontinuities or other appreciable effects.
- The hand was correctly tracked also for positions that would be critical for a single LEAP scenario.
- From the presented measurements, it was impossible to quantify exactly the positioning error (although it can be reasonably argued that it would be no worse than that reported in Table 1).
4. Discussion
- an efficient strategy for merging data coming from both sensors, in substitution of the mutual exclusion strategy, for further reducing occlusions while solving the problem, mentioned above, of the differences in localizing the same joint from different perspectives;
- a numerical hand model, similar to that used in [5], to be associated to the virtual representation of the hand and to be used, beside registering movements, also for calculating forces and efforts exerted by each finger and by the whole hand, which considers the effects of gravity (these calculations, being particularly cumbersome and really interesting just for therapists, could be implemented in an off-line mode);
- an efficient strategy for further reducing occlusions in the numerical hand model based both on the constraints between hand joints, joint angles and efficient temporal filtering (this would improve accuracy of dynamic parameters calculation);
- a framework for developing rehabilitation tasks associated with virtual environments and for analysing numerical rehabilitation data and therapy outcomes;
- a set of calibrated tools, mainly based on transparent springs to reduce occlusions with respect to the hand joints and interference with the LEAP sensors, to be used during rehabilitation exercises for applying resistance to motion.
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Arya, K.N.; Pandian, S.; Verma, R.; Garg, R.K. Movement therapy induced neural reorganization and motor recovery in stroke: A review. J. Bodyw. Movement Ther. 2011, 15, 528–537. [Google Scholar] [CrossRef] [PubMed]
- Burgar, C.G.; Lum, P.S.; Shor, P.C.; Van Der Loos, H.F.M. Development of robots for rehabilitation therapy: The Palo Alto VA/Stanford experience. J. Rehabil. Res. Dev. 2000, 37, 663–673. [Google Scholar] [PubMed]
- Kahn, L.E.; Lum, P.S.; Rymer, W.Z.; Reinkensmeyer, D.J. Robot-assisted movement training for the stroke-impaired arm: Does it matter what the robot does? J. Rehabil. Res. Dev. 2006, 43, 619. [Google Scholar] [CrossRef] [PubMed]
- Placidi, G. A smart virtual glove for the hand telerehabilitation. Comput. Biol. Med. 2007, 37, 1100–1107. [Google Scholar] [CrossRef] [PubMed]
- Franchi, D.; Maurizi, A.; Placidi, G. A Numerical Hand Model for a Virtual Glove Rehabilitation System. In Proceedings of the 2009 IEEE Medical Measurements and Applications, Cetraro, Italy, 29–30 May 2009; pp. 41–44. [Google Scholar]
- Franchi, D.; Maurizi, A.; Placidi, G. Characterization of a SimMechanics Model for a Virtual Glove Rehabilitation System. Comput. Model. Objects Represent. Images 2010, 6026, 141–150. [Google Scholar]
- Zimmerli, L.; Jacky, M.; Lünenburger, L.; Riener, R.; Bolliger, M. Increasing patient engagement during virtual reality-based motor rehabilitation. Arch. Phys. Med. Rehabil. 2013, 94, 1737–1746. [Google Scholar] [CrossRef] [PubMed]
- Placidi, G.; Avola, D.; Iacoviello, D.; Cinque, L. Overall design and implementation of the virtual glove. Comput. Biol. Med. 2013, 43, 1927–1940. [Google Scholar] [CrossRef] [PubMed]
- Lloréns, R.; Noé, E.; Colomer, C.; Alcañiz, M. Effectiveness, Usability, and Cost-Benefit of a Virtual Reality-Based Telerehabilitation Program for Balance Recovery After Stroke: A Randomized Controlled Trial. Arch. Phys. Med. Rehabil. 2015, 96, 418–425. [Google Scholar] [CrossRef] [PubMed]
- Placidi, G.; Cinque, L.; Petracca, A.; Polsinelli, M.; Spezialetti, M. A Virtual Glove System for the Hand Rehabilitation based on Two Orthogonal LEAP Motion Controllers. In Proceedings of the 6th International Conference on Pattern Recognition Applications and Methods, ICPRAM 2017, Porto, Portugal, 24–26 February 2017; Volume 1, pp. 184–192. [Google Scholar]
- Rose, F.D.; Brooks, B.M.; Rizzo, A.A. Virtual Reality in Brain Damage Rehabilitation: Review. Cyberpsychol. Behav. 2005, 8, 241–262. [Google Scholar] [CrossRef] [PubMed]
- Saposnik, G.; Levin, M. Virtual Reality in Stroke Rehabilitation. Stroke 2011, 42, 1380–1386. [Google Scholar] [CrossRef] [PubMed]
- Lum, P.S.; Godfrey, S.B.; Brokaw, E.B.; Holley, R.J.; Nichols, D. Robotic approaches for rehabilitation of hand function after stroke. Am. J. Phys. Med. Rehabil. 2012, 91, S242–S254. [Google Scholar] [CrossRef] [PubMed]
- Maciejasz, P.; Eschweiler, J.; Gerlach-Hahn, K.; Jansen-Troy, A.; Leonhardt, S. A survey on robotic devices for upper limb rehabilitation. J. Neuroeng. Rehabil. 2014, 11. [Google Scholar] [CrossRef] [PubMed]
- Rusàk, Z.; Antonya, C.; Horvàth, I. Methodology for controlling contact forces in interactive grasping simulation. Int. J. Virtual Real. 2011, 10, 1–10. [Google Scholar]
- Avola, D.; Spezialetti, M.; Placidi, G. Design of an efficient framework for fast prototyping of customized human–computer interfaces and virtual environments for rehabilitation. Comput. Methods Programs Biomed. 2013, 110, 490–502. [Google Scholar] [CrossRef] [PubMed]
- Chaudhary, A.; Raheja, J.L.; Das, K.; Raheja, S. Intelligent approaches to interact with machines using hand gesture recognition in natural way: A survey. arXiv, 2013; arXiv:1303.2292. [Google Scholar]
- Placidi, G.; Avola, D.; Ferrari, M.; Iacoviello, D.; Petracca, A.; Quaresima, V.; Spezialetti, M. A low-cost real time virtual system for postural stability assessment at home. Comput. Methods Programs Biomed. 2014, 117, 322–333. [Google Scholar] [CrossRef] [PubMed]
- Placidi, G.; Petracca, A.; Pagnani, N.; Spezialetti, M.; Iacoviello, D. A Virtual System for Postural Stability Assessment Based on a TOF Camera and a Mirror. In Proceedings of the 3rd 2015 Workshop on ICTs for Improving Patients Rehabilitation Research Techniques, Lisbon, Portugal, 1–2 October 2015; pp. 77–80. [Google Scholar]
- Reach into virtual reality with your bare hands. Available online: http://www.leapmotion.com (accessed on 9 March 2018).
- Weichert, F.; Bachmann, D.; Rudak, B.; Fisseler, D. Analysis of the accuracy and robustness of the leap motion controller. Sensors 2013, 13, 6380–6393. [Google Scholar] [CrossRef] [PubMed]
- Guna, J.; Jakus, G.; Pogačnik, M.; Tomažič, S.; Sodnik, J. An analysis of the precision and reliability of the leap motion sensor and its suitability for static and dynamic tracking. Sensors 2014, 14, 3702–3720. [Google Scholar] [CrossRef] [PubMed]
- Bachmann, D.; Weichert, F.; Rinkenauer, G. Evaluation of the Leap Motion Controller as a New Contact-Free Pointing Device. Sensors 2015, 15, 214–233. [Google Scholar] [CrossRef] [PubMed]
- Petracca, A.; Carrieri, M.; Avola, D.; Basso Moro, S.; Brigadoi, S.; Lancia, S.; Spezialetti, M.; Ferrari, M.; Quaresima, V.; Placidi, G. A virtual ball task driven by forearm movements for neuro-rehabilitation. In Proceedings of the 2015 International Conference on Virtual Rehabilitation (ICVR), Valencia, Spain, 9–12 June 2015; pp. 162–163. [Google Scholar]
- Charles, D.; Pedlow, K.; McDonough, S.; Shek, K.; Charles, T. Close range depth sensing cameras for virtual reality based hand rehabilitation. J. Assist. Technol. 2014, 8, 138–149. [Google Scholar] [CrossRef]
- Sabata, B.; Aggarwal, J.K. Estimation of motion from a pair of range images: A review. CVGIP Image Underst. 1991, 54, 309–324. [Google Scholar] [CrossRef]
- Besl, P.J.; McKay, N.D. A Method for Registration of 3-D Shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Eggert, D.W.; Lorusso, A.; Fisher, R.B. Estimating 3-D rigid body transformations: A comparison of four major algorithms. Mach. Vis. Appl. 1997, 9, 272–290. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Distance (mm) | H-LEAP | V-LEAP | |
|---|---|---|---|
| X Axis | Average | 0.8 | 1.3 |
| Standard Deviation | 0.8 | 0.9 | |
| Maximum | 3.3 | 3.9 | |
| Y Axis | Average | 1.4 | 1.4 |
| Standard Deviation | 1.2 | 1.0 | |
| Maximum | 4.7 | 3.8 | |
| Z Axis | Average | 1.7 | 2.0 |
| Standard Deviation | 1.4 | 1.1 | |
| Maximum | 4.6 | 4.6 | |
| 3D | Average | 2.8 | 3.0 |
| Standard Deviation | 1.4 | 1.1 | |
| Maximum | 6.6 | 6.0 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Placidi, G.; Cinque, L.; Polsinelli, M.; Spezialetti, M. Measurements by A LEAP-Based Virtual Glove for the Hand Rehabilitation. Sensors 2018, 18, 834. https://doi.org/10.3390/s18030834
Placidi G, Cinque L, Polsinelli M, Spezialetti M. Measurements by A LEAP-Based Virtual Glove for the Hand Rehabilitation. Sensors. 2018; 18(3):834. https://doi.org/10.3390/s18030834
Chicago/Turabian StylePlacidi, Giuseppe, Luigi Cinque, Matteo Polsinelli, and Matteo Spezialetti. 2018. "Measurements by A LEAP-Based Virtual Glove for the Hand Rehabilitation" Sensors 18, no. 3: 834. https://doi.org/10.3390/s18030834
APA StylePlacidi, G., Cinque, L., Polsinelli, M., & Spezialetti, M. (2018). Measurements by A LEAP-Based Virtual Glove for the Hand Rehabilitation. Sensors, 18(3), 834. https://doi.org/10.3390/s18030834